EP3712358A1 - Autonomer roboter mit alternierender absaugung für die reinigung von schwimmbädern - Google Patents
Autonomer roboter mit alternierender absaugung für die reinigung von schwimmbädern Download PDFInfo
- Publication number
- EP3712358A1 EP3712358A1 EP19305355.0A EP19305355A EP3712358A1 EP 3712358 A1 EP3712358 A1 EP 3712358A1 EP 19305355 A EP19305355 A EP 19305355A EP 3712358 A1 EP3712358 A1 EP 3712358A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- robot
- suction
- mouth
- compartment
- pivoting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000009182 swimming Effects 0.000 title claims abstract description 20
- 238000004140 cleaning Methods 0.000 title claims abstract description 13
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 claims abstract description 31
- 238000005192 partition Methods 0.000 claims abstract description 19
- 239000012141 concentrate Substances 0.000 claims description 6
- 230000000903 blocking effect Effects 0.000 claims description 3
- 230000002457 bidirectional effect Effects 0.000 description 4
- 208000031968 Cadaver Diseases 0.000 description 2
- 238000005265 energy consumption Methods 0.000 description 2
- 230000006978 adaptation Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000001737 promoting effect Effects 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 238000010407 vacuum cleaning Methods 0.000 description 1
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H4/00—Swimming or splash baths or pools
- E04H4/14—Parts, details or accessories not otherwise provided for
- E04H4/16—Parts, details or accessories not otherwise provided for specially adapted for cleaning
- E04H4/1654—Self-propelled cleaners
- E04H4/1663—Self-propelled cleaners the propulsion resulting from an intermittent interruption of the waterflow through the cleaner
-
- E—FIXED CONSTRUCTIONS
- E04—BUILDING
- E04H—BUILDINGS OR LIKE STRUCTURES FOR PARTICULAR PURPOSES; SWIMMING OR SPLASH BATHS OR POOLS; MASTS; FENCING; TENTS OR CANOPIES, IN GENERAL
- E04H4/00—Swimming or splash baths or pools
- E04H4/14—Parts, details or accessories not otherwise provided for
- E04H4/16—Parts, details or accessories not otherwise provided for specially adapted for cleaning
- E04H4/1654—Self-propelled cleaners
Definitions
- the present invention belongs to the field of swimming pool maintenance devices, in particular swimming pool cleaning robots, and relates more particularly to an autonomous vacuum cleaning robot with alternating suction for cleaning swimming pools.
- swimming pool robots the main function of which is the suction of debris.
- electric robots There are different types of pool robots among which are electric robots.
- European patent EP3283711 B1 in the name of the applicant, discloses a swimming pool cleaning robot comprising an electro-hydraulic power unit / water jet pump, and a debris collection body which comprises a battery for supplying said group, the group and the battery being contained in a rotating and waterproof turret, outside the robot body.
- the robot advantageously comprises an automatic direction reversal device comprising a pallet integral with the turret.
- This bidirectional robot moves alternately in two substantially opposite directions, propelled by the reaction of a water jet issuing from a rotating nozzle, integral with the turret, adapted to take two opposite angular positions.
- the suction takes place independently of the direction of movement of the robot.
- Most robots have a main suction port through which water enters the robot's debris collection body regardless of the movement of the robot.
- Some robots are equipped with several suction ports, for example two mouths, one of which is located near the front side of the robot and the other at the rear of the robot, for repeated passage over the suction area. debris, in other words for successive aspirations, in order to refine cleaning and collection of debris. Nevertheless, the suction power obtained with several mouths remains equivalent to that which would be obtained with a single mouth of section equal to the sum of the sections of said mouths. In addition, when the suction power is not enough to "lift" the heaviest debris as soon as it passes through the first suction mouth, the passage of the second mouth remains just as futile, if not barely more effective.
- the two suction ports do not have the same utility depending on the direction of movement of the robot.
- the suction mouth which is found at the front following the direction of movement of the robot sucks up a major part of the debris and the other mouth, at the rear, only sucks up a few debris which have remained at the bottom.
- the efficiency of a robot with two suction mouths symmetrical with respect to a median plane of said robot is very slightly greater than that of a robot having a single suction mouth of equivalent section.
- Pool robots are equipped with one or more suction pumps and can have one or two suction ports.
- a single mouth generally located in the axis of the robot, does not effectively capture debris near peripheral walls, for example.
- the solution which consists in creating a mouth at each end of the robot would solve this problem, but the simultaneous operation of these two mouths results in a lower suction flow rate at each mouth, and therefore in a loss of efficiency. Maintaining the efficiency of two mouths operated simultaneously would imply a doubling of the suction power of the pump, which would increase costs, double energy consumption, and penalize the autonomy of a battery-powered robot.
- the proposed solution makes it possible to solve this problem without increasing power and without losing efficiency by producing a robot with two end openings in alternating operation so as to have on the active mouth all of the flow drawn by the pump.
- the main object of the present invention is to overcome the limitations of the prior art by proposing a swimming pool robot with alternating suction, said suction being operated by a single mouth at a time depending on the direction of movement of said robot, thus improving the suction efficiency and / or reducing the energy consumption of the robot.
- the present invention relates to a swimming pool cleaning robot comprising a body for collecting debris, a propulsion and suction system capable of moving the robot alternately in two substantially opposite directions, and a supply device, such as than a battery pack.
- This robot is remarkable in that the body comprises two filter compartments separated by a partition and each provided with a water inlet, said partition allowing to concentrate the total suction of the robot in one compartment and to block it in the other according to the direction of movement of the robot.
- the propulsion and suction system and the feed device are contained in a rotating and sealed turret, external to the body of the robot, and each direction of movement of the robot is determined by an automatic orientation of the turret.
- the propulsion and suction system comprises two motorized propellers, each of said propellers ensuring the propulsion of the robot in one of the directions of movement and the suction in one of the filtering compartments.
- the robot comprises a pivoting suction mouth integral with the turret, said mouth allowing the passage of water into one compartment and blocking the passage of water into the other compartment, so as to concentrate the total suction. of the robot in one compartment or the other depending on the direction of movement of the robot.
- the pivoting suction mouth has a side opening communicating with one compartment at a time, and an upper opening communicating with a water outlet of the robot.
- the pivoting suction mouth is in the form of a hollow cylinder with a circular base, the lateral opening being made at the level of a diameter of said cylinder and the upper opening being axial and contiguous with said lateral opening.
- the pivoting suction mouth is arranged above the partition so as to be flush with an upper edge of said partition.
- the rotating suction mouth can be screwed onto the turret.
- the propulsion and suction system is an electrohydraulic water jet powertrain / pump.
- robot or the expression “swimming pool robot” designates indifferently and by extension an autonomous robot for cleaning swimming pools.
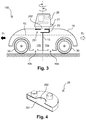
- the figures 1 and 2 show a robot 100 according to the invention mainly comprising a body 10, formed by the assembly of an upper shell 11 and a lower shell 12, a sealed turret 20, containing an electrohydraulic powertrain / pump and its electric battery d 'supply not shown, wheels 30 and water inlets 40a and 40b provided in the bottom of the body 10.
- Body 10 can be of any shape and size to accommodate different sizes of basins, preferably a substantially compact shape and small dimensions for convenience and unobtrusiveness.
- the body 10 consists of two interlocking parts, the upper shell 11 and the lower shell 12, thus facilitating disassembly of the body 10 for access to the interior volume of said body.
- the interior volume of the body 10, visible on the figure 3 contains for its part a debris collection device in the form of a filter 13 placed above a tank materialized by a lower part of said body, for example the lower shell 12.
- the turret 20 surmounts the body 10 and essentially contains the powertrain / electro-hydraulic water jet pump and the electric supply battery, shown in broken lines on the figure. figure 3 .
- the turret 20 is mounted on the body 10 by a rotary connection, produced here by an annular flange of the body around a receiving hole of an annular base of the turret, and is oriented according to the direction of movement of the robot 100 in accordance with the principle described in the patent EP3283711B1 .
- turret is used here in its general sense of a rotary device placed on a vehicle to orient an organ and possibly protect it.
- the power train / pump comprises an electric motor, reduction gears and a turbine whose function is to suck the water, which enters through the water inlets 40a and 40b and passes through the filter 13, and to discharge it through an ejection nozzle 21 which emerges from the turret 20 to propel the robot 100, the direction of the discharge being substantially parallel to the bottom of the swimming pool so as to promote propulsion.
- the robot 100 can, instead of or in addition to the wheels 30, include other drive means such as rollers or tracks.
- the robot 100 comprises a partition 15 of separation at the level of the body 10, dividing the internal volume of the body into two isolated compartments 14a and 14b, and a pivoting suction mouth 25, integral with the rotating turret 20.
- the partition 15 is disposed vertically at the level of a median transverse plane of the body 10, thus dividing the body into two compartments of substantially equal volumes.
- the partition 15 has a reduced thickness, a few millimeters, to limit the occupation of the useful volume for collecting debris.
- the partition 15 has an upper edge flush with the pivoting suction mouth 25.
- the pivoting suction mouth 25 is driven in rotation by the turret 20 and comprises a lateral opening 251 and an upper opening 252.
- the lateral opening 251 is placed on one side or the other of the partition 15 according to the orientation of the turret 20, and thereby of the pivoting mouth 25, so that said mouth communicates with a compartment 14a or 14b at the same time, thus concentrating the suction at the level of a single water inlet 40a or 40b.
- the upper opening 252 provides, for its part, access to the ejection nozzle 21 of the robot.
- the pivoting mouth 25 allows both to allow the passage of water through a compartment of the body 10 and to oppose the passage of water into the other compartment, and conversely, imposing thus the circulation of water in only one direction in the manner of a valve.
- the side openings 251 and upper 252 can be separated, as in the example of figure 3 , or contiguous with a common edge, as in the example of figure 4 , in which case their edges form a closed curve extending into the lateral and upper faces of the pivoting mouth 25.
- the pivoting mouth 25 has a shape of a half cylinder with a flattened and hollow circular base, in which the side opening 251 is rectangular and extends along a diameter of the base, and the upper opening 252 is an axial hole in the form of a Semi circle.
- the pivoting mouth 25 defines a cavity with a circular side wall, advantageous for the circulation of water during suction by promoting the formation of vortices converging towards the upper opening 252.
- the pivoting mouth 25 further comprises fixing means (not shown) allowing its assembly with the turret 20.
- Such means are for example a thread produced on the lateral face of the pivoting mouth to screw said mouth into a suitable bore of the turret.
- the pivoting mouth 25 according to the invention can have other shapes on condition of allowing the suction of water in a first compartment of the body while blocking it in the second, and this in an alternative manner according to the rotation of the turret. .
- the pivoting mouth 25 is oriented towards the front compartment 14b, the robot 100 moving in the direction D1 indicated by the solid arrow. Consequently, the suction is concentrated only in the compartment 14b, the water enters through the front water inlet 40b, passes successively through the filter 13, the side opening 251 and the upper opening 252 of the pivoting mouth 25 , and finally emerges through the ejection nozzle 21 which is not shown. In the rear compartment 14a, the suction is blocked by the pivoting mouth 25 which closes the passage between said compartment and the partition 15.
- figure 5 representing the prior art
- figures 6a and 6b representing the present invention
- the figure 7 shows schematically an alternating suction produced by the turret 20 and the pivoting mouth 25 according to the embodiment described below.
- the figure 8 schematically shows an alternating suction obtained in a double-propeller robot for bidirectional propulsion, in which the body 10 is divided into two filter compartments by a partition 15.
- each suction-propulsion propeller is associated with a single filter compartment , itself associated with a single suction mouth.
- the presence of the partition 15 makes it possible to concentrate the total suction of the robot in one compartment or in the other depending on the direction of movement of said robot.
- the figures 9 to 14 show the partition 15 and the swivel suction mouth 25 installed in a real pool robot such as that of figures 1 and 2 .
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Manipulator (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19305355.0A EP3712358B1 (de) | 2019-03-22 | 2019-03-22 | Autonomer roboter mit alternierender absaugung für die reinigung von schwimmbädern |
| US16/824,855 US10851558B2 (en) | 2019-03-22 | 2020-03-20 | Autonomous alternating-suction robot for cleaning swimming pools |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19305355.0A EP3712358B1 (de) | 2019-03-22 | 2019-03-22 | Autonomer roboter mit alternierender absaugung für die reinigung von schwimmbädern |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3712358A1 true EP3712358A1 (de) | 2020-09-23 |
| EP3712358B1 EP3712358B1 (de) | 2021-11-03 |
Family
ID=66041395
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19305355.0A Active EP3712358B1 (de) | 2019-03-22 | 2019-03-22 | Autonomer roboter mit alternierender absaugung für die reinigung von schwimmbädern |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10851558B2 (de) |
| EP (1) | EP3712358B1 (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115182628A (zh) * | 2022-08-05 | 2022-10-14 | 智橙动力(北京)科技有限公司 | 检测泳池清洁机器人堵塞的方法、及泳池清洁机器人 |
| EP4442933A1 (de) * | 2023-04-04 | 2024-10-09 | Shenzhen Aiper Intelligent Co., Ltd | Reinigungsroboter für schwimmbecken |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4107346A4 (de) | 2020-02-19 | 2024-02-21 | Pavel Sebor | Automatischer schwimmbeckenreiniger |
| USD969428S1 (en) * | 2021-11-08 | 2022-11-08 | Hangzhou Kongyu Swimming Pool Co., Ltd. | Pool cleaner |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5337434A (en) * | 1993-04-12 | 1994-08-16 | Aqua Products, Inc. | Directional control means for robotic swimming pool cleaners |
| US20020104790A1 (en) * | 2001-01-30 | 2002-08-08 | Lincke Steven L. | Filter element for swimming pool cleaner |
| FR2869058A1 (fr) * | 2004-04-14 | 2005-10-21 | Zodiac Pool Care Europ Soc Par | Appareil nettoyeur de surface immergee a conduit d'entree anti-retour. |
| EP2821564A2 (de) * | 2014-01-07 | 2015-01-07 | Aquatron Robotic Technology Ltd. | Schwimmbadreiniger |
| EP3283711A2 (de) | 2015-10-05 | 2018-02-21 | Kokido Development Limited | Autonomer schwimmbeckenreinigungsroboter |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5351355A (en) * | 1993-05-26 | 1994-10-04 | Paul Chiniara | Swimming pool cleaner |
-
2019
- 2019-03-22 EP EP19305355.0A patent/EP3712358B1/de active Active
-
2020
- 2020-03-20 US US16/824,855 patent/US10851558B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5337434A (en) * | 1993-04-12 | 1994-08-16 | Aqua Products, Inc. | Directional control means for robotic swimming pool cleaners |
| US20020104790A1 (en) * | 2001-01-30 | 2002-08-08 | Lincke Steven L. | Filter element for swimming pool cleaner |
| FR2869058A1 (fr) * | 2004-04-14 | 2005-10-21 | Zodiac Pool Care Europ Soc Par | Appareil nettoyeur de surface immergee a conduit d'entree anti-retour. |
| EP2821564A2 (de) * | 2014-01-07 | 2015-01-07 | Aquatron Robotic Technology Ltd. | Schwimmbadreiniger |
| EP3283711A2 (de) | 2015-10-05 | 2018-02-21 | Kokido Development Limited | Autonomer schwimmbeckenreinigungsroboter |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115182628A (zh) * | 2022-08-05 | 2022-10-14 | 智橙动力(北京)科技有限公司 | 检测泳池清洁机器人堵塞的方法、及泳池清洁机器人 |
| EP4442933A1 (de) * | 2023-04-04 | 2024-10-09 | Shenzhen Aiper Intelligent Co., Ltd | Reinigungsroboter für schwimmbecken |
Also Published As
| Publication number | Publication date |
|---|---|
| US10851558B2 (en) | 2020-12-01 |
| EP3712358B1 (de) | 2021-11-03 |
| US20200299987A1 (en) | 2020-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3712358B1 (de) | Autonomer roboter mit alternierender absaugung für die reinigung von schwimmbädern | |
| EP2235295B1 (de) | Vorrichtung zur reinigung einer untergetauchten fläche und mit einem pumpmotor ausserhalb des hydraulischen systems | |
| CA2709851C (fr) | Appareil nettoyeur de surface immergee a dispositif de filtrage demontable | |
| EP2513393B1 (de) | Reinigungsgerät für eine unterwasseroberfläche mit rotation beim hochziehen | |
| EP2235296B1 (de) | Vorrichtung zur reinigung einer untergetauchten fläche mit abgewinkeltem filtrationssystem | |
| EP2321483B1 (de) | Rollgerät zur reinigung einer unterwasserfläche mit einem ausrichtbaren antriebsfluss | |
| EP2235298B1 (de) | Vorrichtung zur reinigung einer untergetauchten fläche mit wirbelfiltration | |
| EP2240654B1 (de) | Vorrichtung zur reinigung einer untergetauchten fläche mit abgewinkeltem pumplaufrad | |
| EP2235294B1 (de) | Vorrichtung zur reinigung einer untergetauchten fläche mit einem einlasskanal mit nicht gleichförmigem querschnitt | |
| EP2585655B1 (de) | Reinigungsfahrzeug für eine unterwasseroberfläche | |
| WO2011073594A1 (fr) | Appareil nettoyeur de surface immergée à giration par au moins un organe roulant non moteur décalé latéralement | |
| FR2925552A1 (fr) | Appareil roulant nettoyeur de surface immergee a entrainement partiellement hydraulique | |
| FR2954378A1 (fr) | Appareil nettoyeur de surface immergee a cabrage hydraulique | |
| FR2954377A1 (fr) | Appareil nettoyeur de surface immergee a moteur electrique unique reversible d'entrainement et de pompage | |
| FR2990975A1 (fr) | Appareil nettoyeur de surface immergee a jet d'eau propulsif | |
| EP3365514B1 (de) | Schwimmbeckenreiniger mit hindernisbeseitigungsvorrichtung | |
| EP4403725A1 (de) | Saugroboter mit doppelauslassspirale zur schwimmbeckenreinigung | |
| FR2836945A1 (fr) | Appareil de nettoyage automatique du fond d'un bassin rempli de liquide | |
| FR3026128A1 (fr) | Robot de nettoyage des parois d'une piscine | |
| FR3024484A1 (fr) | Procede de filtration ameliore de l'eau d'un bassin |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20201027 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E04H 4/16 20060101AFI20201127BHEP |
|
| INTG | Intention to grant announced |
Effective date: 20201221 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1444085 Country of ref document: AT Kind code of ref document: T Effective date: 20211115 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602019008959 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20211103 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1444085 Country of ref document: AT Kind code of ref document: T Effective date: 20211103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220203 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220303 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220303 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220203 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220204 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602019008959 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20220804 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220322 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220331 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220322 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240326 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20190322 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240328 Year of fee payment: 6 Ref country code: BE Payment date: 20240328 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211103 |