EP3489050A1 - Wankstabilisierungseinrichtung für ein neigbares kraftfahrzeug mit einer hydropneumatischen federung - Google Patents
Wankstabilisierungseinrichtung für ein neigbares kraftfahrzeug mit einer hydropneumatischen federung Download PDFInfo
- Publication number
- EP3489050A1 EP3489050A1 EP18205567.3A EP18205567A EP3489050A1 EP 3489050 A1 EP3489050 A1 EP 3489050A1 EP 18205567 A EP18205567 A EP 18205567A EP 3489050 A1 EP3489050 A1 EP 3489050A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- train
- roll
- hydraulic
- control means
- mct
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G21/00—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces
- B60G21/02—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected
- B60G21/06—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected fluid
- B60G21/073—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected fluid between wheels on the same axle but on different sides of the vehicle, i.e. the left and right wheel suspensions being interconnected
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G21/00—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces
- B60G21/02—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected
- B60G21/06—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected fluid
- B60G21/067—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces permanently interconnected fluid between wheels on different axles on the same side of the vehicle, i.e. the left or the right side
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G21/00—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces
- B60G21/10—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces not permanently interconnected, e.g. operative only on acceleration, only on deceleration or only at off-straight position of steering
- B60G21/106—Interconnection systems for two or more resiliently-suspended wheels, e.g. for stabilising a vehicle body with respect to acceleration, deceleration or centrifugal forces not permanently interconnected, e.g. operative only on acceleration, only on deceleration or only at off-straight position of steering transversally
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62K—CYCLES; CYCLE FRAMES; CYCLE STEERING DEVICES; RIDER-OPERATED TERMINAL CONTROLS SPECIALLY ADAPTED FOR CYCLES; CYCLE AXLE SUSPENSIONS; CYCLE SIDE-CARS, FORECARS, OR THE LIKE
- B62K5/00—Cycles with handlebars, equipped with three or more main road wheels
- B62K5/10—Cycles with handlebars, equipped with three or more main road wheels with means for inwardly inclining the vehicle body on bends
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2202/00—Indexing codes relating to the type of spring, damper or actuator
- B60G2202/40—Type of actuator
- B60G2202/41—Fluid actuator
- B60G2202/413—Hydraulic actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2300/00—Indexing codes relating to the type of vehicle
- B60G2300/45—Rolling frame vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60G—VEHICLE SUSPENSION ARRANGEMENTS
- B60G2500/00—Indexing codes relating to the regulated action or device
- B60G2500/30—Height or ground clearance
Definitions
- the invention relates to motor vehicles which are reclinable in turns and which comprise at least one hydropneumatic suspension device.
- reclining motor vehicle is understood here to mean a land vehicle having at least one driving machine enabling it to move, which can tilt in the turns and comprising a passenger reception structure (s), open or closed, and either a train comprising a right wheel and a left wheel, and another train comprising a single wheel, that is two trains each having a right wheel and a left wheel, Therefore, it may be a car with three or four wheels, or a three-wheeled motorcycle constituting a tricycle (such as for example a three-wheeled scooter or a "trike”), or a four-wheel motorcycle constituting a quadricycle, or any other four-wheeled vehicle. wheels and narrow rear axle with a possibility of steep inclination curve.
- the right and left wheels of at least one train are coupled to a hydropneumatic suspension device.
- the latter may comprise right and left dampers respectively coupled to the right and left wheels and interconnected by a hydraulic circuit which is controlled by control means. This is particularly the case of the hydropneumatic suspension device which is described in the patent document FR 3037279 .
- This type of hydropneumatic suspension device can make it possible to brake or limit the roll of the vehicle while allowing, when leaning on one of its sides, a recovery by the dynamics of the vehicle following the action of its driver on the handlebars or the steering wheel.
- a predefined speed threshold for example approximately 5 km / h
- the placement of the solenoid valves in their closed state (non-passing) blocks (or locks) the roll and thus keeps the vehicle vertical.
- a predefined speed threshold for example approximately 5 km / h
- the known hydropneumatic suspension devices only allow automated preservation of the vertical position, but in no case a correction of the roll or a recovery of the vehicle.
- hydropneumatic suspension devices known and used in urban vehicles with narrow track (s) do not allow to enhance (or correct the pumping or trim) of the passenger reception structure ( s) of the vehicle in relation to its front and / or rear axle to ensure a substantially constant attitude regardless of the load. They are content to block (or lock) the current position by a mechanical or hydraulic action, usually temporarily.
- the invention is therefore particularly intended to improve the situation.
- a hydraulic correction device intended to equip a tilting motor vehicle having a passenger reception structure (s) and a first train comprising right and left wheels coupled to right and left dampers of a first hydropneumatic suspension device, in which circulates a fluid and providing a roll control function.
- the invention also proposes a tilting motor vehicle comprising a passenger reception structure (s), a first train comprising right and left wheels coupled to right and left dampers of a first hydropneumatic suspension device, in which circulates a fluid and providing a roll control function, and a device for hydraulic correction of the type of that presented above.
- a tilting motor vehicle comprising a passenger reception structure (s), a first train comprising right and left wheels coupled to right and left dampers of a first hydropneumatic suspension device, in which circulates a fluid and providing a roll control function, and a device for hydraulic correction of the type of that presented above.
- Such a vehicle may, for example, also comprise a second train comprising a wheel coupled to a second suspension device, to form a tricycle (such as for example a three-wheeled scooter or a "trike"). But it could also include a second train comprising right and left wheels coupled to right and left dampers of a second suspension device, possibly hydropneumatic, to form a quadricycle.
- a second train comprising right and left wheels coupled to right and left dampers of a second suspension device, possibly hydropneumatic, to form a quadricycle.
- the object of the invention is notably to propose a hydraulic correction device DC intended to equip a tilting motor vehicle V having a passenger reception structure SA and a first train T1 comprising RD1 and left right wheels RG1 coupled to a first hydropneumatic suspension device DS1.
- the tilting motor vehicle V to at least one narrow track (or train) T2 and includes a structure SA passenger reception (s) closed and therefore not allowing the driver to act to maintain a vertical position at rest (and in particular to put the foot on the ground).
- the invention is not limited to this type of tilting motor vehicle. It concerns indeed any type of land vehicle having at least one driving machine allowing it to move, being able to tilt in the turns and comprising either a train comprising a right wheel and a left wheel, and another train comprising a single wheel, two trains each comprising a right wheel and a left wheel.
- the tilting motor vehicle V comprises only a driving machine allowing it to move.
- This driving machine is for example a heat engine.
- a reclining motor vehicle V can comprise at least one heat engine and / or at least one electric machine.
- the vehicle V four-wheel RD1, RG1, RD2 and RG2. It more specifically comprises a first train T1 comprising a right wheel RD1 and a left wheel RG1, and a second train T2 comprising a right wheel RD2 and a left wheel RG2.
- the vehicle V could comprise a first train comprising a right wheel and a left wheel and a second train having a single wheel.
- the (narrowest) train here is the second (rear) train T2.
- the train (the more) narrow could be the front train.
- the first hydropneumatic suspension device DS1 is coupled to the right wheels RD1 and left RG1 of the first train T1.
- the second suspension device (here hydropneumatic) DS2 is coupled to the right wheel RD2 and left RG2 of the second train T2. It is important to note that the implementation of the invention does not require the second suspension device DS2 to be hydropneumatic, but this is preferable for comfort and to control the greater load variations at the rear.
- the first hydropneumatic suspension device DS1 comprises, for example, a first right damper AD1, a first left damper AG1, and a first hydraulic circuit CH1 controlled by first control means MP1.
- the first right damper AD1 comprises a lower end coupled to the right wheel RD1 of the first train T1.
- the first damper left AG1 comprises a lower end coupled to the left wheel RG1 of the first train T1.
- Each lower end is for example the end portion of a cylinder in which slides the axis of a piston, called the cylinder rod.
- These first shock absorbers right AD1 and left AG1 are also interconnected by the first hydraulic circuit CH1 in which a fluid (such as oil) circulates in a controlled manner. They are for example arranged in the form of cylinders each comprising a lower chamber of variable volume communicating with the first hydraulic circuit CH1 via the cylinder rod which is then hollow to allow the circulation of the fluid. Note that alternatively one could have cylinders each comprising an upper chamber of variable volume communicating with the first hydraulic circuit CH1.
- the first hydraulic circuit CH1 comprises in particular a first solenoid valve EV11 associated with a first non-return means MA11 allowing the circulation of the fluid in a first direction, a second solenoid valve EV12 associated with a second nonreturn means MA12 allowing the circulation of this same fluid in a second direction opposite to the first direction, and first ACD1 right accumulators and left ACG1.
- the first direction goes from the first right damper AD1 to the first left damper AG1, and thus the second direction goes from the first left damper AG1 to the first right damper AD1.
- the first solenoid valve EV11 is coupled to the first non-return means MA11 via a sub-duct and communicates via another sub-duct with a straight part of a main duct which also communicates with the first right accumulator ACD1 and the first right damper AD1 .
- the first non-return means MA11 communicates via another sub-duct with a left part of the main duct which also communicates with the first left accumulator ACG1 and the first left damper AG1.
- the second solenoid valve EV12 is coupled to the second non-return means MA12 via a sub-conduit and communicates via another sub-conduit with the left part of the main conduit.
- the second non-return means MA12 communicates via another sub-conduit with the right part of the main conduit.
- the first EV11 and second EV12 solenoid valves can, for example, be placed in at least three states: a (completely) open state in which they let all the fluid arriving at their input without loss of flow, a (totally) state closed in which they prohibit any passage of the fluid arriving at their inlet, and a partially open state in which they let part of the fluid arriving at their inlet with a restriction of flow and a pressure drop.
- they are of the so-called "proportional" type, and can therefore take a plurality of different partially open states, between the closed state and the open state, as a function of a control voltage defined by the first means. MP1 pilot.
- the default state of the first EV11 and second EV12 solenoid valves is the (fully) open state.
- the first EV11 and second EV12 solenoid valves, the first MA11 and second MA12 non-return means, and the different sub-conduits can be housed in a first hydraulic housing BH1 which is coupled to the first control means MP1.
- first MA11 and second MA12 non-return means may be check valves.
- the first hydraulic circuit CH1 can, as illustrated without limitation on the Figures 2 to 5 , also include third EV13 and fourth EV14 solenoid valves.
- the third solenoid valve EV13 is interposed between the first right damper AD1 and the first right accumulator ACD1 to control access to the latter (ACD1) according to instructions defined by the first control means MP1.
- the fourth solenoid valve EV14 is interposed between the first left damper AG1 and the first left accumulator ACG1 to control access to the latter (ACG1) according to instructions defined by the first control means MP1.
- these third EV13 and fourth EV14 solenoid valves can be placed in at least two states: a (totally) open state in which they let all the fluid passing on their input / output without loss of flow, and a state ( totally) closed in which they prohibit any passage of fluid arriving on their input / output.
- the damping function of the hydropneumatic suspension can, for example, be achieved by a leakage hole and a stack of diaphragms in parallel. This damping function can be placed between the input of a right accumulator ACD1 or left ACG1 and the third EV13 or fourth EV14 associated solenoid valve.
- the default state of the third EV13 and fourth EV14 solenoid valves is the (fully) open state.
- the first control means MP1 are installed in a computer CS of the vehicle V, for example responsible for the supervision of several organs. But this is not obligatory. Indeed, they could be part of a computer belonging to the first hydropneumatic suspension device DS1. Furthermore, these first MP1 control means can be made in the form of software modules (or computer (or “software”)), or a combination of electronic circuits (or “hardware”) and software modules.
- the first control means MP1 are arranged to place the solenoid valves EV11, EV12, EV13 and EV14 in states selected by the control means MCT of the hydraulic correction device DC, and to determine the states in which the solenoid valves EV11 are to be placed, EV12, EV13 and EV14 in the absence of instruction from the hydraulic correction device DC. This last determination is then based on, at least, the inclination of the vehicle V relative to the vertical direction.
- the assembly including the four solenoid valves EV11, EV12, EV13 and EV14 can be placed in several states (three are described below).
- a first state is illustrated on the figure 2 . It corresponds to an investment of at least one of the first EV11 and second EV12 solenoid valves in the closed state and third EV13 and fourth EV14 solenoid valves in the closed state to at least partially block the roll with the first non-operational suspension because the oil can not flow from the first right damper AD1 to the first right accumulator ACD1 and / or the first right damper AG1 to the first accumulator ACG1 left.
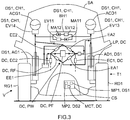
- a second state is illustrated on the figure 3 . It corresponds to a placement of at least one of the first EV11 and second EV12 solenoid valves in the closed state and third EV13 and fourth EV14 solenoid valves in the open state to allow the first operational suspension (the oil can indeed flow from the first right damper AD1 to the first right accumulator ACD1 and / or from the first left damper AG1 to the first left accumulator ACG1).
- a third state is illustrated on the figure 4 . It corresponds to a placement of the first EV11 and second EV12 solenoid valves in their open state and third EV13 and fourth EV14 solenoid valves in their open state to inject oil simultaneously into the first right shock absorbers AD1 and left AG1 to enhance the height of the SA passenger accommodation structure (s) compared to the first T1 train.
- the height correction in pumping, or constant attitude is in fact carried out sustainably by a common equilibrium pressure throughout the first hydraulic circuit CH1 in order to compensate for the transfer of oil in at least one accumulator ACG1, ACD1 to reach the pressure of balance imposed by the load to be carried.
- the second suspension device DS2 may be hydropneumatic and therefore similar to the first hydropneumatic suspension device DS1 described above.
- it comprises a second right damper AD2, a second left damper AG2, and a second hydraulic circuit CH2 driven by second control means MP2.
- the second right damper AD2 comprises a lower end coupled to the right wheel RD2 of the second train T2.
- the second damper left AG2 comprises a lower end coupled to the left wheel RG2 of the second train T2.
- Each lower end is for example the end portion of a cylinder in which slides the axis of a piston, called the cylinder rod.
- These second dampers right AD2 and left AG2 are also interconnected by the second hydraulic circuit CH2 in which a fluid (such as oil) circulates in a controlled manner. They are for example arranged in the form of cylinders each comprising a lower chamber of variable volume communicating with the second hydraulic circuit CH2 via the cylinder rod which is then hollow to allow the circulation of the fluid. Note that alternatively one could have cylinders each comprising an upper chamber of variable volume communicating with the second hydraulic circuit CH2.
- the second hydraulic circuit CH2 comprises in particular a first solenoid valve EV21 associated with a first nonreturn means MA21 allowing the circulation of the fluid in a first direction, a second solenoid valve EV22 associated with a second nonreturn means MA22 allowing the circulation of the same fluid in a second direction opposite to the first direction, and second accumulators ACD2 right and ACG2 left.
- the first direction goes from the second right damper AD2 to the second left damper AG2, and therefore the second direction goes from the second left damper AG2 to the second right damper AD2.
- the first solenoid valve EV21 is coupled to the first non-return means MA21 via a sub-duct and communicates via another sub-duct with a straight part of a main duct which also communicates with the second right accumulator ACD2 and the second right damper AD2 .
- the first non-return means MA21 communicates via another sub-duct with a left part of the main duct which also communicates with the second left accumulator ACG2 and the second left damper AG2.
- the second solenoid valve EV22 is coupled to the second non-return means MA22 via a sub-conduit and communicates via another sub-conduit with the left part of the main conduit.
- the second non-return means MA22 communicates via another sub-conduit with the right part of the main conduit.
- the first EV21 and second EV22 solenoid valves of the second hydraulic circuit CH2 may, for example, be placed in at least the same three states as those of the first EV11 and second EV12 solenoid valves of the first hydraulic circuit CH1: a (totally) open state, a state (totally) closed, and a partially open state.
- they are of the proportional type, and therefore can take a plurality of different partially open states as a function of a control voltage defined by the second control means MP2.
- the default state of the first EV21 and second EV22 solenoid valves is the (fully) open state.
- the first EV21 and second EV22 solenoid valves, the first MA21 and second MA22 non-return means, and the different sub-conduits can be housed in a second hydraulic housing BH2 which is coupled to the second control means MP2.
- first MA21 and second MA22 non-return means may be check valves.
- the second hydraulic circuit CH2 can, as illustrated without limitation on the figure 6 , also include third EV23 and fourth EV24 solenoid valves.
- the third solenoid valve EV23 is interposed between the second right damper AD2 and the second right accumulator ACD2 to control access to the latter (ACD2) according to instructions defined by the second control means MP2.
- the fourth solenoid valve EV24 is interposed between the second left damper AG2 and the second left accumulator ACG2 to control access to the latter (ACG2) according to instructions defined by the second control means MP2.
- these third EV23 and fourth EV24 solenoid valves can be placed in at least two states: a (totally) open state in which they let all the fluid passing on their input / output without loss of flow, and a state ( totally) closed in which they prohibit any passage of the fluid arriving at their entry / exit.
- the default state of the third EV23 and fourth EV24 solenoid valves is the (fully) open state.
- the second control means MP2 are installed in the computer CS. But this is not obligatory. Indeed, they could be part of a computer belonging to the second hydropneumatic suspension device DS2. Moreover, these second MP2 control means can be realized in the form of software modules, or a combination of electronic circuits and software modules.
- the second control means MP2 are arranged to place the solenoid valves EV21, EV22, EV23 and EV24 in states selected by the control means MCT of the hydraulic correction device DC, and to determine the states in which the solenoid valves EV21 must be placed, EV22, EV23 and EV24 in the absence of instruction from the hydraulic correction device DC. This last determination is then based on, at least, the inclination of the vehicle V relative to the vertical direction.
- the assembly comprising the four solenoid valves EV21, EV22, EV23 and EV24 can be placed in several states (three are described below).
- the first state is identical to the first state illustrated on the figure 2 . It corresponds to a placement of at least one of the first EV21 and second EV22 solenoid valves in the closed state and third EV23 and fourth EV24 solenoid valves in the closed state to lock the roll with the second non-operational suspension because the oil can not flow from the second right damper AD2 to the second right accumulator ACD2 and / or second left damper AG2 to the second accumulator left ACG2.
- a second state is identical to the second state illustrated on the figure 3 . It corresponds to a placement of at least one of the first EV21 and second EV22 solenoid valves in the closed state and third EV23 and fourth EV24 solenoid valves in their open state to leave the second suspension operational (the oil can indeed flow from the second right damper AD2 to the second right accumulator ACD2 and / or the second right damper AG2 to the second accumulator left ACG2).
- a third state is illustrated on the figure 6 . It corresponds to a placement of the first EV21 and second EV22 solenoid valves in their open state and third EV23 and fourth EV24 solenoid valves in their open state to inject oil simultaneously into the second shock absorbers AD2 right and left AG2 to enhance the height of the SA passenger accommodation structure (s) compared to the second T2 train.
- a hydraulic correction device DC comprises at least one hydraulic Wheatstone bridge PW and MCT control means.
- the hydraulic Wheatstone bridge PW has a straight part (EA1, EE1) and a left part (EA2, EE2) which are dedicated to fluid exchange controls (intake and exhaust) with the first right shock absorbers AD1 and left AG1 respectively.
- first train T1 and a central portion which comprises a PF pump associated with an RF fluid reservoir and which couples the right (EA1, EE1) and left (EA2, EE2) parts together.
- the control means MCT are arranged so as to impose a first configuration on the bridge (of hydraulic Wheatstone) PW which is adapted to a rectification of the structure SA with respect to the right wheel RD1 or the left wheel RG1 of the first train T1 depending on whether this structure SA leans to the right or left, and a roll lock of the first train T1 with right dampers AD1 and left AG1 non-operational or operational depending on whether the current speed of the vehicle V is lower or higher than a speed threshold.
- This speed threshold may, for example, be between about 0 km / h and about 20 km / h. As an illustrative example, it may be equal to 5 km / h.
- the roll lock can be partial when only one of the first EV11 and second EV12 solenoid valves is placed in its closed state, or total when the first EV11 and second EV12 solenoid valves are placed in the closed state.
- first right dampers AD1 and left AG1 need to be operational when the vehicle V is traveling at a speed greater than the speed threshold, because this vehicle V is subject to the roughness of the road.
- the control means MCT impose either a roll lock of the first train T1 with the right dampers AD1 and left AG1 nonoperational in association with a first flow of the pump PF when the current speed is below the speed threshold, ie a roll release of the first train T1 with the right dampers AD1 and left AG1 non-operational in association with a second flow rate of the pump PF, greater than the first flow, when the speed in course is above the speed threshold.
- the flow rate of the PF pump is part of the PW bridge configuration.
- the first rate of the PF pump can be obtained when operating at idle (typically for 1000 RPM).
- the second flow rate of the pump PF can be obtained when operating at a speed between 2000 rpm and 3500 rpm.
- the right part (EA1, EE1) of the bridge PW may comprise a right intake solenoid valve EA1 coupled to an output of the central part of the bridge PW and the first right damper AD1 of the first train T1, and a right exhaust solenoid valve EE1 coupled to the first right shock absorber AD1 of the first train T1 and to an input of the central part of the bridge PW (located upstream of the pump PF and coupled to the RF fluid reservoir).
- the left part (EA2, EE2) of the bridge PW may comprise a left intake solenoid valve EA2 coupled to the output of the central part and the first left damper AG1 of the first train T1, and a left exhaust solenoid valve EE2 coupled to the first left damper AG1 of the first train T1 and the input of the central part of the bridge PW.
- the right intake solenoid valve EA1 makes it possible to control the oil supply of the first right damper AD1 of the first train T1
- the right exhaust solenoid valve EE1 makes it possible to control the evacuation of oil out of the first damper right AD1 of the first train T1
- the left intake solenoid valve EA2 makes it possible to control the oil supply of the first left shock absorber AG1 of the first train T1
- the left exhaust solenoid valve EE2 makes it possible to control the evacuation of oil off the first AG1 left shock absorber of the first train T1.
- the pump PF is used to suck oil contained in the RF tank to supply the first right damper AD1 and / or the first damper AG1 of the first train T1, via the right inlet solenoid valve EA1 and / or the solenoid valve left intake EA2, or to discharge the oil contained in the first right damper AD1 or left AG1 of the first train T1, via the exhaust valve right EE1 or left EE2, to supply the RF tank.
- the right intake valves EA1 and left EA2 and the right exhaust valves EE1 and left EE2 are preferably of the proportional type, and therefore can each take a plurality of different partially open states, between the closed state and the closed state. open state, as a function of a control voltage defined by the MCT control means.
- the default state of the right intake valves EA1 and left EA2 and the right exhaust valves EE1 and left EE2 is preferably the (totally) closed state.
- the left exhaust solenoid valve EE2 and the right intake solenoid valve EA1 are in the open state while the left intake solenoid valve EA2 and the exhaust solenoid valve EE1 right are in the closed state, in order to remove oil from the first left damper AG1 to inject it into the first right damper AD1, and thus straighten the structure on the right.
- the hydraulic correction device DC also comprises, between the outlet of its central part (downstream of the pump PF) and the inlet of the RF tank, a pressure limiter LP for setting the pressure at the output of the pump PF.
- the intake of oil in a damper depends on the pressure difference between the equilibrium pressure and the pressure setting pressure LP pressure.
- the exhaust depends on the equilibrium pressure, we can neglect the atmospheric pressure.
- the hydraulic correction device DC may also be arranged so as to allow the structure SA to be raised at least relative to the first train T1.
- the MCT control means impose a second configuration PW bridge which is adapted to an enhancement of the SA structure relative to the first train T1 and a release of the roll of the first train T1, when a height of the SA structure compared to the first train T1 is less than a height threshold. Under these conditions it is the second train T2 which ensures the vertical maintenance of the vehicle V.
- Such an enhancement or correction of pumping or trim
- the release of the roll of the first train T1 is imposed by the control means MCT by means of a command transmitted to the first control means MP1 and corresponding to the placement of the assembly comprising the four solenoid valves EV11, EV12, EV13 and EV14 in its third state (see figure 4 ).
- the height threshold may, for example, be between about 5 cm and about 10 cm. As an illustrative example, it may be equal to 5 cm.
- the MCT control means may impose a third flow rate to the pump PF, higher than the first flow.
- the third flow rate of the pump PF can be obtained when operating at a speed of between 2000 rpm and 3500 rpm.
- the four solenoid valves EV11, EV12, EV13 and EV14 being open, the accumulators ACD1 and ACG1 are solicited and the suspension is crushed before departure. Therefore, the flow can be important to not delay the start.
- the second configuration of the PW bridge (illustrated on the figure 4 ) consists in placing at least one of the right intake valves EA1 and left EA2 in the open state and the right exhaust valves EE1 and left EE2 in the closed state, in order to suck oil into the RF tank to inject it into at least one of the first right shock absorbers AD1 and left AG1, and thus enhance the structure SA symmetrically with respect to the first train T1.
- the roll of the first T1 train is released (by imposing the placement of the EV11 set to EV14 in its third state (EV11 open, EV12 open, EV13 open and EV14 open)), in order to equalize the pressures left and right.
- the hydraulic correction device DC may also be arranged so as to enable the structure SA to be raised relative to the second train T2 (comprising at least one wheel).
- the hydraulic correction device DC also comprises first EC1 and second EC2 coupling electrovalves EC1.
- the first coupling solenoid EC1 is responsible for ensuring a first controlled coupling between the output of the central part of the bridge PW and an input of the second suspension device DS2 (here located on the second hydraulic circuit CH2 between the second right accumulator ACD2 and the second right damper AD2, as an example (see figure 6 )).
- the second coupling solenoid EC2 is responsible for ensuring a second controlled coupling between an input of the central portion of the bridge PW (located upstream of the pump PF) and an output of the second suspension device DS2 (here located on the second circuit CH2 hydraulics between the second left ACG2 accumulator and the second left buffer AG2, as an example (see figure 6 )).
- the MCT control means impose, once the structure SA raised relative to the first train T1, a third configuration PW bridge and an opening of the first EC1 and second EC2 coupling solenoid valves adapted to an enhancement of the structure SA relative to the second train T2, and a roll lock of the first train T1, when a height of the SA structure relative to the second train T2 is less than another height threshold.
- This other height threshold may, for example, be between about 5 cm and about 10 cm. As an illustrative example, it may be equal to 5 cm.
- the roll lock of the first train T1 is imposed in order not to lose the trim of the structure SA previously obtained with respect to the first train T1.
- the MCT control means can impose the first flow rate to the pump PF to induce the raising of the SA structure relative to the second train T2.
- first EC1 and second EC2 coupling electrovalves can be placed in at least two states: a (totally) open state and a (totally) closed state.
- the default state of the first coupling electrodes EC1 and second EC2 is preferably the (totally) closed state.
- the third configuration of the PW bridge (shown on the figure 5 ) consists in placing the right intake valves EA1 and left EA2 and the right exhaust valves EE1 and EE2 left in the closed state, in order to supply oil to the second hydraulic circuit CH2, and thus enhance the SA structure by compared to the second train T2.
- the roll of the first train T1 is blocked (by imposing the placement of the set EV11 to EV14 in its first state (EV11 closed, EV12 closed, EV13 closed and EV14 closed)), in order to maintain the base (or pumping) compared to the first T1 train.
- the MCT control means impose a release of the roll of the second train T2 with the second non-operational right dampers AD2 and left AG2 when the height of the SA structure relative to the second train T2 is less than the other height threshold.
- the assembly comprising the first EV21, second EV22, third EV23 and fourth EV24 solenoid valves is placed in its third state (EV21 open, EV22 open, EV23 open and EV24 open).
- the MCT control means impose a placement of at least one of the first EV21 and second EV22 solenoid valves in the closed state.
- MCT control means are installed in the computer CS. But this is not obligatory. Indeed, they could be part of a computer belonging to the DC hydraulic correction device. Moreover, these MCT control means can be made in the form of software modules, or a combination of electronic circuits and software modules.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1761159A FR3074100B1 (fr) | 2017-11-24 | 2017-11-24 | Dispositif de correction de roulis pour un vehicule automobile inclinable a dispositif de suspension hydropneumatique |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP3489050A1 true EP3489050A1 (de) | 2019-05-29 |
Family
ID=60955296
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18205567.3A Withdrawn EP3489050A1 (de) | 2017-11-24 | 2018-11-12 | Wankstabilisierungseinrichtung für ein neigbares kraftfahrzeug mit einer hydropneumatischen federung |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3489050A1 (de) |
| FR (1) | FR3074100B1 (de) |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2124542A1 (de) * | 1971-05-18 | 1972-11-30 | Hoesch Ag, 4600 Dortmund | Steuerelektronik für Niveauregeleinrichtungen, insbesondere für Kraftfahrzeuge |
| JP2006131182A (ja) * | 2004-11-09 | 2006-05-25 | Honda Motor Co Ltd | 車両用サスペンション装置 |
| EP1759896A2 (de) * | 2004-12-17 | 2007-03-07 | Peugeot Citroen Automobiles SA | Vorrichtung zur aktiven hydropneumatischen Federung für ein mit einer solchen Federungsvorrichtung versehenes Kraftfahrzeug |
| DE102006049793A1 (de) * | 2006-10-21 | 2008-04-24 | Continental Teves Ag & Co. Ohg | Federungssystem |
| DE102009022328A1 (de) * | 2008-12-10 | 2010-06-17 | Daimler Ag | Dämpfereinrichtung |
| US20130320714A1 (en) * | 2012-02-10 | 2013-12-05 | Steven P. Young | Wheel cover system for a 3-wheeled motorcycle |
| EP3015296A2 (de) * | 2014-10-31 | 2016-05-04 | vonRoll infratec (investment) ag | Neigungsermöglichende radaufhängung für fahrzeuge |
| EP2729351B1 (de) * | 2011-07-07 | 2016-05-11 | David Andrew Gale | Fahrzeug |
| FR3037279A1 (fr) | 2015-06-15 | 2016-12-16 | Peugeot Citroen Automobiles Sa | Dispositif de suspension hydropneumatique pour un vehicule automobile inclinable, a electrovannes a etats fonction de l'inclinaison |
-
2017
- 2017-11-24 FR FR1761159A patent/FR3074100B1/fr active Active
-
2018
- 2018-11-12 EP EP18205567.3A patent/EP3489050A1/de not_active Withdrawn
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2124542A1 (de) * | 1971-05-18 | 1972-11-30 | Hoesch Ag, 4600 Dortmund | Steuerelektronik für Niveauregeleinrichtungen, insbesondere für Kraftfahrzeuge |
| JP2006131182A (ja) * | 2004-11-09 | 2006-05-25 | Honda Motor Co Ltd | 車両用サスペンション装置 |
| EP1759896A2 (de) * | 2004-12-17 | 2007-03-07 | Peugeot Citroen Automobiles SA | Vorrichtung zur aktiven hydropneumatischen Federung für ein mit einer solchen Federungsvorrichtung versehenes Kraftfahrzeug |
| DE102006049793A1 (de) * | 2006-10-21 | 2008-04-24 | Continental Teves Ag & Co. Ohg | Federungssystem |
| DE102009022328A1 (de) * | 2008-12-10 | 2010-06-17 | Daimler Ag | Dämpfereinrichtung |
| EP2729351B1 (de) * | 2011-07-07 | 2016-05-11 | David Andrew Gale | Fahrzeug |
| US20130320714A1 (en) * | 2012-02-10 | 2013-12-05 | Steven P. Young | Wheel cover system for a 3-wheeled motorcycle |
| EP3015296A2 (de) * | 2014-10-31 | 2016-05-04 | vonRoll infratec (investment) ag | Neigungsermöglichende radaufhängung für fahrzeuge |
| FR3037279A1 (fr) | 2015-06-15 | 2016-12-16 | Peugeot Citroen Automobiles Sa | Dispositif de suspension hydropneumatique pour un vehicule automobile inclinable, a electrovannes a etats fonction de l'inclinaison |
Also Published As
| Publication number | Publication date |
|---|---|
| FR3074100A1 (fr) | 2019-05-31 |
| FR3074100B1 (fr) | 2019-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3106375B1 (de) | Hydropneumatische federungsvorrichtung für neigbares kraftfahrzeug, mit magnetventilen für den entsprechenden funktionsstatus der neigung | |
| FR2501127A1 (fr) | Structure de systeme de roulement pour engin de chantier | |
| FR2562844A1 (fr) | Dispositif de commande de la durete de la suspension d'un vehicule | |
| FR2911658A1 (fr) | Dispositif de transmission hydrostatique d'un engin. | |
| FR2669595A1 (fr) | Installation de freinage hydraulique a systeme antiblocage et regulation antipatinage a l'entrainement. | |
| EP1197363B1 (de) | Aufhängungssystem mit einer Niveauregeleinrichtung | |
| FR2635729A1 (fr) | Dispositif de correction d'assiette d'un vehicule automobile | |
| EP0893321A1 (de) | Oleopneumatische Aufhängungsvorrichtung zur Begrenzung des Wankens oder des Gierens | |
| FR3074100B1 (fr) | Dispositif de correction de roulis pour un vehicule automobile inclinable a dispositif de suspension hydropneumatique | |
| JP6370325B2 (ja) | 運搬車両 | |
| EP3532319A1 (de) | Verfahren zur steuerung der neigung eines kippbaren fahrzeugs durch einwirken auf eine hydropneumatische aufhängungsvorrichtung | |
| FR3074099B1 (fr) | Dispositif de suspension hydropneumatique pour un vehicule automobile inclinable, a blocage du roulis a l’arret | |
| FR2786749A1 (fr) | Vehicule de type monotrace a roues stabilisatrices escamotables asservies a la vitesse | |
| FR2761332A1 (fr) | Dispositif de reduction des transferts de charge des vehicules a 2 roues tels que motocyclettes et velomoteurs | |
| EP3638523B1 (de) | Antirollvorrichtung mit gesteuerter kupplungsvorrichtung für eine fahrzeugachsenanordnung | |
| FR2862920A1 (fr) | Vehicule lourd | |
| FR3066148B1 (fr) | Dispositif de controle du redressement d’un vehicule automobile inclinable a dispositif de suspension hydropneumatique | |
| EP3681740B1 (de) | Rollschutzvorrichtung für kraftfahrzeugradsatz mit betätigungsmitteln, die durch einen hydraulischen steuerkreis gesteuert werden | |
| WO2019138167A1 (fr) | Vehicule pendulaire a systeme de redressement et procede de redressement | |
| JP2009286364A (ja) | 車両の後部構造 | |
| FR3031071A1 (fr) | Vehicule pendulaire a moyens de verrouillage de l'inclinaison. | |
| EP2102049B1 (de) | Kraftfahrzeugbremsanordnung | |
| FR2921625A1 (fr) | Vehicule motorise a trois roues | |
| EP4308390A1 (de) | Hydraulische trägheitsaufhängungsvorrichtung, verfahren, stossdämpfer und fahrzeug auf basis solch einer vorrichtung | |
| FR2927021A1 (fr) | Systeme anti-roulis pour vehicule automobile. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20191130 |