EP3138720A1 - Verfahren und vorrichtung zur anpassung einer fahrpedalkennlinie - Google Patents
Verfahren und vorrichtung zur anpassung einer fahrpedalkennlinie Download PDFInfo
- Publication number
- EP3138720A1 EP3138720A1 EP16001656.4A EP16001656A EP3138720A1 EP 3138720 A1 EP3138720 A1 EP 3138720A1 EP 16001656 A EP16001656 A EP 16001656A EP 3138720 A1 EP3138720 A1 EP 3138720A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- engine
- torque
- characteristic
- accelerator pedal
- accelerator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D11/105—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the function converting demand to actuation, e.g. a map indicating relations between an accelerator pedal position and throttle valve opening or target engine torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
- F02D41/10—Introducing corrections for particular operating conditions for acceleration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1497—With detection of the mechanical response of the engine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D11/00—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated
- F02D11/06—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance
- F02D11/10—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type
- F02D2011/101—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the means for actuating the throttles
- F02D2011/102—Arrangements for, or adaptations to, non-automatic engine control initiation means, e.g. operator initiated characterised by non-mechanical control linkages, e.g. fluid control linkages or by control linkages with power drive or assistance of the electric type characterised by the means for actuating the throttles at least one throttle being moved only by an electric actuator
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2200/00—Input parameters for engine control
- F02D2200/60—Input parameters for engine control said parameters being related to the driver demands or status
- F02D2200/602—Pedal position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D2250/00—Engine control related to specific problems or objectives
- F02D2250/18—Control of the engine output torque
- F02D2250/21—Control of the engine output torque during a transition between engine operation modes or states
Definitions
- the invention relates to a method for adapting the accelerator pedal characteristic in a motor vehicle in which an accelerator pedal characteristic describing the relationship between the accelerator pedal travel and a requested engine nominal torque is adapted during a driving operation.
- the invention further relates to a device which is designed for carrying out the method.
- the torque control of the drive motor is usually controlled electronically.
- a mechanical coupling between accelerator pedal and drive motor is eliminated.
- the accelerator pedal equipped with a pedal encoder 1, which determines the accelerator pedal 2 and a computing unit 40 provides for further processing.
- This arithmetic unit 40 determines, with additional vehicle data 3 (eg a current engine speed), the engine target torque 8 which is requested by the drive motor 9.
- accelerator characteristic curves are stored in advance on the arithmetic unit 40, which assign a nominal motor torque 8 to the accelerator pedal travel 2.
- the accelerator characteristic curves can be adapted to the target criteria with regard to agility, meterability, safety and fuel consumption, depending on the situation or driver.
- a corresponding method is for example from the EP 1 334 862 A2 known.
- the publication DE 10 2010 041 544 A1 suggests for a fuel-efficient vehicle operation to design the accelerator pedal characteristic with small accelerator pedal paths degressive. This will speed up the vehicle less. The driving style is calmed down, and subsequent braking maneuvers are reduced.
- the drive engine is designed as an internal combustion engine, this method is at the expense of engine efficiency.
- an economical driving style is characterized by acceleration maneuvers with high engine efficiency. Since internal combustion engines typically achieve high engine efficiency at high engine torques near the full load characteristic, a more progressive accelerator characteristic would be more useful in this case.
- the object of the invention is in particular to provide such a method which supports a consumption-optimal and / or engine efficiency optimal driving or with which the drive motor can be operated in a most efficient map range in manual driving.
- a method for adapting the accelerator pedal characteristic in a motor vehicle in which an accelerator pedal characteristic describing the relationship between the accelerator pedal travel and a requested engine target torque of the drive motor is adapted during a driving operation.
- the method comprises determining a desired engine torque, in particular a desired engine torque, which enables consumption-optimized operation of the motor vehicle and / or high engine efficiency if it were to be requested as engine target torque at the moment.
- the engine demand torque therefore corresponds to a current value for a target engine torque, which would be desirable as engine torque default for the drive engine for engine efficiency and / or consumption considerations, ie would be particularly advantageous.
- the current engine demand torque is to be distinguished from the current engine target torque, which is determined by the current accelerator pedal travel and the current characteristic curve.
- the determination of the engine desired torque is preferably carried out continuously while driving, so that in each case a momentary engine desired torque is determined at short time intervals.
- the region of the accelerator pedal travel to which the accelerator characteristic associates an engine nominal torque that corresponds to the engine desired torque or is close to it.
- the driver can thus more easily control an operating point of the drive motor by operating it with high efficiency and / or high consumption efficiency.
- the characteristic is thus continuously adjusted during driving or at least regularly so that over a wide accelerator pedal travel, d. H. at least via a further accelerator pedal travel than with an unadjusted characteristic curve, an engine target torque is set, which leads to a high engine efficiency and / or a high fuel efficiency.
- the desired engine torque can be determined as a function of at least one operating parameter of the motor vehicle, in particular depending on the efficiency of the drive motor, preferably with the aid of previously determined maps.
- the engine desired torque is determined in dependence on a current engine speed and a predetermined characteristic, wherein the characteristic of each engine speed assigns that engine torque for which the specific consumption is minimal and / or the engine efficiency is maximum.
- This characteristic is referred to in the art as B emin line.
- the engine-requested torque can also be determined as a function of a route information relating to a route ahead of the motor vehicle.
- the route information may indicate, for example, a height profile or an expected speed profile on the preceding route section.
- an engine target torque trajectory for the road section ahead and / or time horizon can be determined which minimizes fuel consumption taking into account predetermined boundary conditions.
- the engine desired torque is set in dependence on the determined engine target torque trajectory.
- the instantaneous engine demand torque would then each correspond to the value of the engine torque trajectory associated with the current drive position.
- a constraint may be a temporal constraint, e.g. B. in the form of a minimum time in which the route ahead section is to be traversed.
- This variant offers the advantage of taking into account route information that is ahead, so that the overall consumption over the preceding section of the route can be better optimized.
- a desired engine torque can be specified, which is not optimal from the point of view of engine efficiency at the present time, but would lead to a consumption-optimal operation of the drive engine with regard to the predicted optimal engine torque curve when driving through the track.
- the adapted characteristic in the area of the flattened course can have a plateau-like course.
- the characteristic thus has no or only a small slope in the region around the engine desired torque.
- the flattened course may be in a range between 30% and 80% of the accelerator pedal travel. Further, the flattened course may include at least a range of 50% to 60% of the accelerator pedal travel and / or may not include the range of 0% to 30%, so that the driver still has the ability to meter the vehicle acceleration with low gas pedal deflections. Furthermore, the area of the flattened course may comprise at least 15%, more preferably at least 30% of the accelerator pedal travel.
- the adapted characteristic may have an S-shaped profile, in particular with a degressively designed first section with small accelerator pedal paths, a middle progressively designed section and a plateau-like end section, which includes the value of the driver's desired torque.
- the flattened region in particular the plateau-like course, extends to the end region of the accelerator pedal travel, d. H. up to 100% of the accelerator pedal travel so that the engine target torque is limited to the engine desired torque.
- This variant offers the advantage that the engine is operated even with high accelerator pedal deflection with high engine efficiency.
- the adaptation of the accelerator characteristic does not have to be continuously effective, but can be activated in suitable situations and deactivated again when no suitable situation exists.
- the adaptation of the accelerator characteristic in response to a situation detection of the vehicle and / or the environment can be activated and / or deactivated.
- the adjustment of the accelerator characteristic should not be made in driving situations in which a stronger impairment of driving behavior should be avoided, for. B. in critical driving situations.
- An advantageous variant of this embodiment therefore provides that the situation detection determines whether an acceleration situation exists and / or whether an acceleration situation is imminent, ie likely will be done shortly.
- the adaptation of the accelerator characteristic is activated according to this variant, if an acceleration situation is present or imminent.
- an acceleration situation may be present or detected if a vehicle longitudinal acceleration exceeds a predetermined threshold value and a vehicle speed exceeds a predefined minimum speed, eg. B. 30 km / h, exceeds.
- the minimum speed ensures that a characteristic curve adaptation is not carried out during acceleration processes during start-up, maneuvering, etc., since the highest possible meterability via the accelerator pedal is desired here.
- an imminent acceleration situation can be detected by the fact that an actual vehicle speed is more than a predetermined difference threshold below a guideline speed or maximum speed for a road type on which the motor vehicle is currently traveling. In this case, it is likely that the driver will promptly try to accelerate to the top speed or top speed.
- an accelerator pedal characteristic adjusting apparatus for a motor vehicle configured to adjust an accelerator characteristic describing the relationship between the accelerator pedal travel and a requested engine target torque during a driving operation.
- the device is designed to carry out the method according to one of the preceding claims. To avoid repetition, features disclosed purely in accordance with the method are also to be regarded as being functional features of the device and thus disclosed as being in accordance with the device and to be able to be claimed.
- the invention further relates to a motor vehicle, in particular a utility vehicle, with a device as disclosed in this document.
- FIG. 1 illustrates the adaptation of the accelerator characteristic curve on the basis of a schematic block diagram.
- the accelerator pedal is equipped in a conventional manner with a pedal encoder 1, which determines the accelerator pedal travel 2 set by the driver.
- a program-technically configured control unit 40 continuously receives the currently set accelerator pedal travel 2 while driving and electronically controls the torque control of the drive motor.
- At least one predefined accelerator characteristic curve is stored in the arithmetic unit, which assigns a corresponding nominal motor torque 8 to each value of the accelerator pedal travel, which torque is transmitted to the drive motor 9 as a torque setpoint torque request.
- additional vehicle data 3 can be used.
- the control unit 40 can adapt the at least one stored accelerator characteristic. However, the adaptation of the accelerator characteristic is only activated in suitable driving situations, otherwise deactivated. For this purpose, the control unit 40 is set up to detect appropriate driving situations and to activate the adaptation of the accelerator pedal characteristic as long as there is a suitable driving situation and to deactivate it if there is no longer suitable driving situation. This functionality is identified by the reference numeral 6 and will be described in more detail below.
- control unit 40 is set up to continuously determine a current value for a desired engine torque 12 while driving.
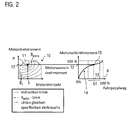
- This functionality of the control unit is in FIG. 1 denoted by the reference numeral 5 and in the left diagram of FIG. 2 explained in more detail.
- the consumption map 10 in the form of a motor torque / engine speed diagram shows the specific fuel consumption corresponding so-called "mussel curves " B e , the full load characteristic 11 and the so-called. B emin curve B emin .
- a so-called B emin curve B emin is stored in the control device , which assigns an engine speed in each case that engine torque for which the specific consumption is minimal or the motor efficiency is maximum.
- control unit 40 When driving, the control unit 40 continuously receives the current engine speed n via the input data 3 and determines from the engine speed n the assigned point P on the B emin curve 11 or the corresponding current desired engine torque 12.
- the range b1 left and right of the engine torque 12 is characterized by a low slope, in particular by a smaller slope than before the adjustment of the characteristic.
- the accelerator pedal travel 13 assigned to the specific engine desired torque 12 is arranged approximately centrally in the flattened region b1. Thereby, the driver can generate an engine target torque command 8, which is close to the engine requested torque 12, over a wide accelerator pedal travel range b1. This supports a motor efficiency-optimized driving style. At high accelerator pedal paths, the characteristic increases again more strongly, so that here the full engine torque (100%) can be requested.
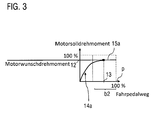
- the accelerator characteristic adjustment may also be designed so that the maximum requestable engine target torque 8 is limited to the engine desired torque 12, which is in FIG. 3 is shown.
- the characteristic curve 14a after reaching the engine desired torque on a straight course 15a to the maximum accelerator pedal travel (100%).
- the area b2 of the flattened course thus extends up to 100% of the accelerator pedal travel.
- the engine is operated with high engine efficiency even with high accelerator pedal deflection.
- the accelerator characteristic curve 14 or 14a is thus continuously adjusted, so that the flattened region 15, 15a of the characteristic curve continuously shifts.
- the situation recognition 6 allows the targeted adaptation of the accelerator characteristic during particularly advantageous situations and prevents the accelerator characteristic from being adapted in situations in which an impairment of the driving behavior is to be expected.
- the acceleration situation can be detected directly from vehicle data.
- the temporal evolution of the vehicle speed observed or / and the operator inputs are evaluated to z.
- probabilities for a future acceleration situation can be derived from environmental conditions. If, for example, the type of road on which the vehicle is currently located is determined, a typical guideline speed for this type of road can be compared with the current vehicle speed. If the two speeds deviate significantly from one another, an acceleration situation is likely.
- the limitation of the engine target torque to the engine requested torque according to the in FIG. 3 shown example with such a road type-based method in advantageous situations.
- a characteristic adaptation according to FIG. 3 take place, in which the maximum requestable engine target torque is limited to the engine desired torque according to the characteristic curve 14a.
- only a small speed difference to the straightening speed is to be bridged, so that a limit the maximum requestable engine power to the engine requested torque produced no major loss of comfort.
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Abstract
Description
- Die Erfindung betrifft ein Verfahren zur Anpassung der Fahrpedalcharakteristik bei einem Kraftfahrzeug, bei dem während eines Fahrbetriebs eine den Zusammenhang zwischen Fahrpedalweg und einem angeforderten Motorsolldrehmoment beschreibende Fahrpedalkennlinie angepasst wird. Die Erfindung betrifft ferner eine Vorrichtung, die zur Durchführung des Verfahrens ausgebildet ist.
- Bei heutigen Kraftfahrzeugen wird die Drehmomentansteuerung des Antriebsmotors üblicherweise elektronisch geregelt. Eine mechanische Kopplung zwischen Fahrpedal und Antriebsmotor entfällt. Hierzu ist, wie in
Figur 4 dargestellt, das Fahrpedal mit einem Pedalwertgeber 1 ausgerüstet, der den Fahrpedalweg 2 ermittelt und einer Recheneinheit 40 zur weiteren Verarbeitung zur Verfügung stellt. Diese Recheneinheit 40 bestimmt mit zusätzlichen Fahrzeugdaten 3 (z. B. einer aktuellen Motordrehzahl) das Motorsolldrehmoment 8, das vom Antriebsmotor 9 angefordert wird. - Typischerweise sind auf der Recheneinheit 40 vorab bestimmte Fahrpedalkennlinien abgelegt, die dem Fahrpedalweg 2 ein Motorsolldrehmoment 8 zuordnen. Die Fahrpedalkennlinien können dabei situationsabhängig oder fahrerinitiiert an Zielkriterien hinsichtlich Agilität, Dosierbarkeit, Sicherheit und Kraftstoffverbrauch angepasst werden. Ein entsprechendes Verfahren ist beispielsweise aus der
EP 1 334 862 A2 bekannt. - Die Offenlegungsschrift
DE 10 2010 041 544 A1 schlägt für einen kraftstoffeffizienten Fahrzeugbetrieb vor, die Fahrpedalkennlinie bei kleinen Fahrpedalwegen degressiv auszulegen. Dadurch wird das Fahrzeug weniger beschleunigt. Die Fahrweise wird beruhigt, und anschließende Bremsmanöver werden reduziert. - Ist der Antriebsmotor als Verbrennungskraftmaschine ausgeführt, geht dieses Verfahren zu Lasten des Motorwirkungsgrads. Insbesondere für schwere Nutzfahrzeuge, die ein deutlich geringes Verhältnis von Motorleistung zur Fahrzeugmasse aufweisen, zeichnet sich eine wirtschaftliche Fahrweise durch Beschleunigungsmanöver mit hohem Motorwirkungsgrad aus. Da Verbrennungskraftmaschinen typischerweise einen hohen Motorwirkungsgrad bei hohen Motordrehmomenten nahe der Volllastkennlinie erreichen, wäre in diesem Fall eine progressivere Fahrpedalkennlinie sinnvoller.
- Aus der Offenlegungsschrift
DE 10 2008 011 607 A1 ist ein weiteres Verfahren zur situationsabhängigen Anpassung der Fahrpedalcharakteristik in einem Fahrzeug bekannt, bei dem in Abhängigkeit von das Umfeld des Fahrzeugs beschreibenden Informationen der Zusammenhang zwischen Fahrpedalstellung und angefordertem Motormoment modifiziert wird. Insbesondere wird vorgeschlagen, dass die Änderung des Motormoments gegenüber einem linearen Zusammenhang von Fahrpedalstellung und angefordertem Motormoment progressiv oder degressiv modifiziert wird. - Es ist eine Aufgabe der Erfindung, ein verbessertes Verfahren zur Anpassung der Fahrpedalcharakteristik in einem Fahrzeug bereitzustellen, mit dem Nachteile herkömmlicher Techniken vermieden werden können. Die Aufgabe der Erfindung ist es insbesondere, ein derartiges Verfahren bereitzustellen, das eine verbrauchsoptimale und/oder motorwirkungsgradoptimale Fahrweise unterstützt bzw. mit dem der Antriebsmotor bei manueller Fahrweise in einem möglichst effizienten Kennfeldbereich betrieben werden kann.
- Diese Aufgaben werden durch Verfahren und Vorrichtungen mit den Merkmalen der unabhängigen Ansprüche gelöst. Vorteilhafte Ausführungsformen und Anwendungen der Erfindung ergeben sich aus den abhängigen Ansprüchen und werden in der folgenden Beschreibung unter teilweiser Bezugnahme auf die Figuren näher erläutert.
- Gemäß einem ersten Gesichtspunkt der Erfindung wird ein Verfahren zur Anpassung der Fahrpedalcharakteristik bei einem Kraftfahrzeug bereitgestellt, bei dem während eines Fahrbetriebs eine den Zusammenhang zwischen Fahrpedalweg und einem angeforderten Motorsolldrehmoment des Antriebsmotors beschreibende Fahrpedalkennlinie angepasst wird.
- Das Verfahren umfasst die Bestimmung eines Motorwunschdrehmoments, insbesondere eines Motorwunschdrehmoments, das einen verbrauchsoptimierten Betrieb des Kraftfahrzeugs und/oder einen hohen Motorwirkungsgrad ermöglicht, falls es als Motorsolldrehmoment momentan angefordert werden würde. Das Motorwunschdrehmoment entspricht daher einem momentanen Wert für ein Motorsolldrehmoment, der als Motordrehmomentvorgabe für den Antriebsmotor aus Motorwirkungsgrad- und/oder Verbrauchsgesichtspunkten erwünscht, d. h. besonders vorteilhaft wäre. Das momentane Motorwunschdrehmoment ist von dem momentanen Motorsolldrehmoment, das durch den aktuellen Fahrpedalweg und die aktuelle Kennlinie festgelegt ist, zu unterscheiden. Die Bestimmung des Motorwunschdrehmoments erfolgt vorzugsweise fortlaufend im Fahrbetrieb, so dass in kurzen Zeitabständen jeweils ein momentanes Motorwunschdrehmoment ermittelt wird.
- Um es dem Fahrer des Kraftfahrzeugs bei manueller Fahrweise, bei der der Fahrer durch Vorgabe eines Fahrpedalwegs ein Motorsolldrehmoment anfordert, zu erleichtern, das Kraftfahrzeug verbrauchsoptimiert und/oder motorwirkungsgradoptimiert zu betreiben, kann die Fahrpedalkennlinie in Abhängigkeit von dem bestimmten Motorwunschdrehmoment angepasst werden. Die Anpassung erfolgt dabei derart, dass die angepasste Fahrpedalkennlinie in einem Bereich der Kennlinie, der ein dem bestimmten Motorwunschdrehmoment entsprechendes Motorsolldrehmoment enthält, einen im Vergleich zur unangepassten Fahrpedalkennlinie abgeflachten Verlauf aufweist bzw. in diesem Bereich degressiv modifiziert ist. Mit anderen Worten ist eine durchschnittliche Steigung der modifizierten Kennlinie in einem den Wert des Motorwunschdrehmomentes umgebenden Bereich geringer als die Steigung der ursprünglichen (nicht angepassten) Kennlinie in diesem Bereich. Durch diese Anpassung der Kennlinie vergrößert sich der Bereich des Fahrpedalwegs, dem die Fahrpedalkennlinie ein Motorsolldrehmoment zuordnet, das dem Motorwunschdrehmoment entspricht oder nahe an diesem liegt. Der Fahrer kann so leichter einen Betriebspunkt des Antriebsmotors ansteuern, indem dieser mit hohem Wirkungsgrad und/oder einer hohen Verbrauchseffizienz betrieben wird.
- Mittels des erfindungsgemäßen Verfahren wird die Kennlinie somit im Fahrbetrieb fortlaufend oder zumindest regelmäßig so angepasst, dass über einen weiten Fahrpedalweg, d. h. zumindest über einen weiteren Fahrpedalweg als bei unangepasster Kennlinie, ein Motorsolldrehmoment gestellt wird, das zu einem hohen Motorwirkungsgrad und/oder einer hohen Verbrauchseffizienz führt.
- Das Motorwunschdrehmoment kann in Abhängigkeit von mindestens einem Betriebsparameter des Kraftfahrzeugs, insbesondere in Abhängigkeit von dem Wirkungsgrad des Antriebsmotors, vorzugsweise mit Hilfe vorab bestimmter Kennfelder ermittelt werden.
- Gemäß einer besonders vorteilhaften Ausführungsform wird das Motorwunschdrehmoment in Abhängigkeit von einer momentanen Motordrehzahl und einer vorab bestimmten Kennlinie bestimmt, wobei die Kennlinie jeder Motordrehzahl dasjenige Motordrehmoment zuordnet, für das der spezifische Verbrauch minimal und/oder der Motorwirkungsgrad maximal ist. Diese Kennlinie wird im Stand der Technik auf als Bemin-Linie bezeichnet. Diese Variante bietet den Vorteil, dass das für den jeweiligen Betriebszustand aktuelle Motorwunschdrehmoment mit geringem rechnerischen Aufwand bestimmt werden kann und mittels einer derart angepassten Kennlinie es dem Fahrer erleichtert wird, über den Fahrpedalweg ein Motorsolldrehmoment anzufordern, das zu einem hohem Motorwirkungsgrad führt.
- Das Motorwunschdrehmoment kann jedoch auch in Abhängigkeit von einer Streckeninformation betreffend einen vorausliegenden Streckenabschnitt des Kraftfahrzeugs bestimmt werden. Die Streckeninformation kann beispielsweise ein Höhenprofil oder einen erwarteten Geschwindigkeitsverlauf auf dem vorausliegenden Streckenabschnitt angeben.
- Beispielsweise kann in Abhängigkeit von einer vorausschauenden Streckeninformation für einen vorausliegenden Streckenabschnitt des Kraftfahrzeugs eine Motorsolldrehmomenttrajektorie für den vorausliegenden Streckenabschnitt und/oder Zeithorizont bestimmt werden, die unter Berücksichtigung vorgegebener Randbedingungen den Kraftstoffverbrauch minimiert. Gemäß dieser Variante wird das Motorwunschdrehmoment in Abhängigkeit von der bestimmten Motorsolldrehmomenttrajektorie festgelegt. Das momentane Motorwunschdrehmoment entspräche dann jeweils dem Wert der Motordrehmomenttrajektorie, die der aktuellen Fahrposition zugeordnet ist. Eine Randbedingung kann beispielsweise eine zeitliche Randbedingung sein, z. B. in Form einer Mindestzeit, in der der vorausliegende Streckenabschnitt durchfahren werden soll.
- Diese Variante bietet den Vorteil, dass vorausliegende Streckeninformationen berücksichtigt werden, so dass der Gesamtverbrauch über den vorausliegenden Streckenabschnitt besser optimiert werden kann. Auf diese Weise kann beispielsweise ein Motorwunschdrehmoment vorgegeben werden, das aus Motorwirkungsgradgesichtspunkten zum aktuellen Zeitpunkt zwar nicht optimal ist, aber im Hinblick auf den prädizierten optimalen Motordrehmomentverlauf beim Durchfahren der Strecke insgesamt zu einem verbrauchsoptimalen Betrieb des Antriebsmotors führen würde.
- Verfahren zur prädiktiven verbrauchsoptimierten Bestimmung einer Motorsolldrehmomenttrajektorie, d. h. zur Vorausberechnung eines auf dem vorausliegendem Streckenabschnitt aus Verbrauchsgesichtspunkten optimierten Verlaufs des Motordrehmoments, sind an sich aus dem Stand der Technik bekannt und daher nicht näher erläutert, siehe beispielsweise Stephan Terwen, Vorausschauende Längsregelung schwerer Lastkraftwagen, Schriften des Instituts für Regelungs- und Steuerungssysteme, Karlsruher Institut für Technologie, Band 06, ISBN 978-3-86644-481-2 (z. B. Abb. 2.12 auf Seite 37 mit entsprechender Beschreibung).
- Gemäß einem weiteren Aspekt kann die angepasste Kennlinie im Bereich des abgeflachten Verlaufs einen plateauartigen Verlauf aufweisen. Die Kennlinie weist somit in dem Bereich um das Motorwunschdrehmoment keine oder nur eine kleine Steigung auf.
- Ferner kann zumindest ein Teil des abgeflachten Verlaufs in einem Bereich zwischen 30 % und 80 % des Fahrpedalwegs liegen. Ferner kann der abgeflachte Verlauf zumindest einen Bereich von 50 % bis 60 % des Fahrpedalwegs umfassen und/oder nicht den Bereich von 0 % bis 30 % umfassen, so dass der Fahrer bei geringen Fahrpedalauslenkungen weiterhin die Möglichkeit hat, die Fahrzeugbeschleunigung gefühlvoll zu dosieren. Ferner kann der Bereich des abgeflachten Verlaufs mindestens 15 %, weiter vorzugsweise mindestens 30 % des Fahrpedalwegs umfassen.
- Insgesamt kann die angepasste Kennlinie einen S-förmigen Verlauf aufweisen, insbesondere mit einem degressiv ausgelegten ersten Abschnitt bei kleinen Fahrpedalwegen, einem mittleren progressiv ausgelegten Abschnitt und einem plateauartigen Endabschnitt, der den Wert des Fahrerwunschmoments umfasst.
- Gemäß einer weiteren vorteilhaften Ausführungsvariante erstreckt sich der abgeflachte Bereich, insbesondere der plateauartige Verlauf, bis zum Endbereich des Fahrpedalwegs, d. h. bis zu 100 % des Fahrpedalwegs, so dass das Motorsolldrehmoment auf das Motorwunschdrehmoment begrenzt ist. Diese Variante bietet den Vorzug, dass der Motor auch bei hoher Fahrpedalauslenkung mit hohem Motorwirkungsgrad betrieben wird.
- Die Anpassung der Fahrpedalkennlinie muss dabei nicht kontinuierlich wirksam sein, sondern kann in geeigneten Situationen aktiviert werden und wieder deaktiviert werden, wenn keine geeignete Situation mehr vorliegt.
- Gemäß einer besonders bevorzugten Ausführungsform ist die Anpassung der Fahrpedalkennlinie in Abhängigkeit von einer Situationserkennung des Fahrzeugs und/oder der Umgebung aktivierbar und/oder deaktivierbar. Generell soll die Anpassung der Fahrpedalkennlinie nicht in Fahrsituationen erfolgen, in denen eine stärkere Beeinträchtigung des Fahrverhaltens vermieden werden soll, z. B. in kritischen Fahrsituationen.
- Es ist insbesondere vorteilhaft, die Fahrpedallinie in Beschleunigungssituationen, nicht jedoch bei Konstantfahrt oder Verzögerungsfahrt anzupassen. Eine vorteilhafte Variante dieser Ausführungsform sieht daher vor, dass die Situationserkennung ermittelt, ob eine Beschleunigungssituation vorliegt und/oder ob eine Beschleunigungssituation bevorsteht, d. h. wahrscheinlich in Kürze erfolgt. Die Anpassung der Fahrpedalkennlinie wird gemäß dieser Variante aktiviert, falls eine Beschleunigungssituation vorliegt oder bevorsteht.
- Beispielsweise kann eine Beschleunigungssituation vorliegen bzw. erkannt werden, wenn eine Fahrzeuglängsbeschleunigung einen vorgegebenen Schwellenwert überschreitet und eine Fahrzeuggeschwindigkeit eine vorgegebene Mindestgeschwindigkeit, z. B. 30 km/h, überschreitet. Die Mindestgeschwindigkeit stellt hierbei sicher, dass eine Kennlinienanpassung nicht bei Beschleunigungsvorgängen beim Anfahren, Rangieren etc. vorgenommen wird, da hier eine möglichst hohe Dosierbarkeit über das Fahrpedal erwünscht ist.
- Ferner kann eine bevorstehende Beschleunigungssituation daran erkannt werden, dass eine aktuelle Fahrzeuggeschwindigkeit um mehr als einen vorgegebenen Differenzschwellenwert unterhalb einer Richtgeschwindigkeit oder Höchstgeschwindigkeit für einen Straßentyp, auf dem das Kraftfahrzeug momentan fährt, liegt. In diesem Fall ist es wahrscheinlich, dass der Fahrer zeitnah versuchen wird, auf die Richtgeschwindigkeit oder Höchstgeschwindigkeit zu beschleunigen.
- Gemäß einem zweiten Gesichtspunkt der Erfindung wird eine Vorrichtung zur Anpassung der Fahrpedalcharakteristik bei einem Kraftfahrzeug bereitgestellt, die ausgebildet ist, während eines Fahrbetriebs eine den Zusammenhang zwischen Fahrpedalweg und einem angeforderten Motorsolldrehmoment beschreibende Fahrpedalkennlinie anzupassen. Erfindungsgemäß ist die Vorrichtung ausgebildet, das Verfahren nach einem der vorhergehenden Ansprüche auszuführen. Zur Vermeidung von Wiederholungen sollen rein verfahrensgemäß offenbarte Merkmale auch als funktionale Merkmale der Vorrichtung und somit als vorrichtungsgemäß offenbart gelten und beanspruchbar sein.
- Die Erfindung betrifft ferner ein Kraftfahrzeug, insbesondere ein Nutzfahrzeug, mit einer Vorrichtung wie in diesem Dokument offenbart.
- Die zuvor beschriebenen bevorzugten Ausführungsformen und Merkmale der Erfindung sind beliebig miteinander kombinierbar. Weitere Einzelheiten und Vorteile der Erfindung werden im Folgenden unter Bezug auf die beigefügten Zeichnungen beschrieben. Es zeigen:
- Figur 1
- ein schematisches Blockdiagramm zur Illustration einer Vorrichtung und eines Verfahrens gemäß einem Ausführungsbeispiel der Erfindung;
- Figur 2
- die Bestimmung des Motorwunschdrehmoments anhand eines Verbrauchskennfeldes und eine angepasste Fahrpedalkennlinie gemäß einem Ausführungsbeispiel der Erfindung;
- Figur 3
- eine angepasste Fahrpedalkennlinie gemäß einem weiteren Ausführungsbeispiel der Erfindung; und
- Figur 4
- ein schematisches Blockdiagram zur Illustration einer aus dem Stand der Technik bekannten Anpassung der Fahrpedalcharakteristik.
- Gleiche oder funktional äquivalente Elemente sind in allen Figuren mit denselben Bezugszeichen bezeichnet.
-
Figur 1 illustriert anhand eines schematischen Blockdiagramms die Anpassung der Fahrpedalkennlinie. - Das Fahrpedal ist in an sich bekannter Weise mit einem Pedalwertgeber 1 ausgerüstet, der den vom Fahrer eingestellten Fahrpedalweg 2 ermittelt. Eine programmtechnisch eingerichtete Steuereinheit 40 empfängt fortlaufend im Fahrbetrieb den aktuell gestellten Fahrpedalweg 2 und steuert die Drehmomentansteuerung des Antriebsmotors elektronisch. In der Recheneinheit ist mindestens eine vorab bestimmte Fahrpedalkennlinie hinterlegt, die jedem Wert des Fahrpedalwegs ein entsprechendes Motorsolldrehmoment 8 zuordnet, das als Momentsolldrehmomentanforderung an den Antriebsmotor 9 übermittelt wird. Hierzu können noch zusätzliche Fahrzeugdaten 3 verwendet werden.
- Die Steuereinheit 40 kann die mindestens eine hinterlegte Fahrpedalkennlinie anpassen. Die Anpassung der Fahrpedalkennlinie ist jedoch nur in geeigneten Fahrsituationen aktiviert, ansonsten deaktiviert. Hierzu ist die Steuereinheit 40 eingerichtet, entsprechend geeignete Fahrsituationen zu erkennen und die Anpassung der Fahrpedalkennlinie zu aktivieren, solange eine geeignete Fahrsituation vorliegt, und zu deaktivieren, falls keine geeignete Fahrsituation mehr vorliegt. Diese Funktionalität ist mit dem Bezugszeichen 6 gekennzeichnet und wird weiter unten noch detaillierter beschrieben.
- Ist die Anpassung der Fahrpedalkennlinie durch die Situationserkennung 6 aktiviert, ist die Steuereinheit 40 eingerichtet, im Fahrbetrieb fortlaufend einen aktuellen Wert für ein Motorwunschdrehmoment 12 zu bestimmen. Diese Funktionalität der Steuereinheit ist in
Figur 1 mit dem Bezugszeichen 5 bezeichnet und im linken Diagramm derFigur 2 näher erläutert. - Das Verbrauchskennfeld 10 in Form eines Motordrehmoment/Motordrehzahl-Diagramms zeigt die dem spezifischen Kraftstoffverbrauch entsprechenden sogenannten "Muschelkurven" Be, die Volllastkennlinie 11 und die sog. sog. Bemin-Kennlinie Bemin. Zur Bestimmung des Motorwunschdrehmoments ist in der Steuervorrichtung eine sog. Bemin-Kennlinie Bemin hinterlegt, die einer Motordrehzahl jeweils dasjenige Motordrehmoment zuordnet, für das der spezifische Verbrauch minimal bzw. der Motorwirkungsgrad maximal ist.
- Im Fahrbetrieb empfängt die Steuereinheit 40 über die Eingangsdaten 3 fortlaufend die aktuelle Motordrehzahl n und bestimmt aus der Motordrehzahl n den zugeordneten Punkt P auf der Bemin-Kennlinie 11 bzw. das entsprechende aktuelle Motorwunschdrehmoment 12.
- Anschließend erfolgt eine Anpassung der hinterlegten Fahrpedalkennlinie in Abhängigkeit von dem bestimmten Motorwunschdrehmoment 12. Diese Funktionalität der Steuereinheit ist mit dem Bezugszeichen 7 bezeichnet. Hierbei wird die ursprüngliche, d. h. nicht angepasste hinterlegte Fahrpedalkennlinie (nicht gezeigt) im Fahrbetrieb so angepasst, der der Bereich der Kennlinie um den Wert des Motorwunschdrehmoments einen im Vergleich zur unangepassten Fahrpedalkennlinie abgeflachten Verlauf 15 aufweist. Das rechte Diagramm der Figur 2 zeigt die angepasste Kennlinie. Das bestimmte Motorwunschdrehmoment 12 liegt mittig in einem Bereich b1, der nun einen im Vergleich zur unangepassten Kennlinie abgeflachten Verlauf 15 der Kennlinie 14 aufweist. Der dem Motorwunschdrehmoment 12 zugeordnete Fahrpedalweg ist mit dem Bezugszeichen 13 bezeichnet. Die Bereich b1 links und rechts vom Motorwunschdrehmoment 12 zeichnet sich durch eine geringe Steigung aus, insbesondere durch eine geringere Steigung als vor der Anpassung der Kennlinie. Der dem bestimmten Motorwunschdrehmoment 12 zugeordnete Fahrpedalweg 13 ist ca. mittig im abgeflachten Bereich b1 angeordnet. Dadurch kann der Fahrer über einen weiten Fahrpedalwegbereich b1 eine Motorsolldrehmomentvorgabe 8 erzeugen, die nahe am Motorwunschdrehmoment 12 ist. Dadurch wird eine motorwirkungsgradoptimierte Fahrweise unterstützt. Bei hohen Fahrpedalwegen steigt die Kennlinie wieder stärker an, so dass hier das volle Motordrehmoment (100 %) angefordert werden kann.
- Alternativ kann die Fahrpedalkennlinienanpassung auch so ausgelegt sein, dass das maximal anforderbare Motorsolldrehmoment 8 auf das Motorwunschdrehmoment 12 begrenzt ist, was in
Figur 3 dargestellt ist. Hier weist die Kennlinie 14a nach Erreichen des Motorwunschdrehmoments einen geraden Verlauf 15a bis zum maximalen Fahrpedalweg (100 %) auf. Der Bereich b2 des abgeflachten Verlaufs erstreckt sich somit bis zu 100 % des Fahrpedalwegs. Gemäß dieser Variante wird auch bei hoher Fahrpedalauslenkung der Motor mit hohem Motorwirkungsgrad betrieben. - Da fortlaufend eine aktuelle Motordrehzahl n ermittelt wird und damit fortlaufend ein neues Motorwunschdrehmoment 12, wird somit die Fahrpedalkennlinie 14 bzw. 14a fortlaufend angepasst, so dass sich der abgeflachte Bereich 15, 15a der Kennlinie fortlaufend verschiebt.
- Vorstehend wurde bereits erwähnt, dass die Fahrpedalkennlinienanpassung nur während bestimmter Fahrsituationen erfolgt, die mittels einer Situationserkennung 6 erkannt werden. Die Situationserkennung 6 ermöglicht die gezielte Anpassung der Fahrpedalkennlinie während besonders vorteilhaften Situationen und verhindert, dass die Fahrpedalkennlinie in Situationen angepasst wird, bei denen eine Beeinträchtigung des Fahrverhaltens zu erwarten ist.
- Insbesondere ist es vorteilhaft, die Fahrpedalkennlinie in Beschleunigungssituationen anzupassen. Die Erkennung der Beschleunigungssituation kann direkt aus Fahrzeugdaten erfolgen. Beispielsweise kann die zeitliche Entwicklung der Fahrzeuggeschwindigkeit beobachtet oder/und die Bedieneingaben des Fahrers ausgewertet werden, um z. B. daraus abzuleiten, dass eine Fahrzeuglängsbeschleunigung vorliegt, die einen vorgegebenen Beschleunigungsschwellenwert überschreitet.
- Alternativ können aus Umgebungsbedingungen Wahrscheinlichkeiten für eine zukünftige Beschleunigungssituation abgeleitet werden. Wird beispielsweise der Straßentyp bestimmt, auf dem sich das Fahrzeug aktuell befindet, kann eine für diesen Straßentyp typische Richtgeschwindigkeit mit der aktuellen Fahrzeuggeschwindigkeit verglichen werden. Weichen die beiden Geschwindigkeiten erheblich voneinander ab, so ist eine Beschleunigungssituation wahrscheinlich.
- Ebenfalls kann die Begrenzung des Motorsolldrehmoments auf das Motorwunschdrehmoment gemäß dem in
Figur 3 gezeigten Beispiel mit einem solchen straßentypbasierten Verfahren in vorteilhaften Situationen erfolgen. Ist beispielsweise der Unterschied zwischen straßentypischer Richtgeschwindigkeit und Fahrzeuggeschwindigkeit klein, so kann anstatt einer Kennlinienanpassung gemäßFigur 2 eine Kennlinienanpassung gemäßFigur 3 erfolgen, bei der das maximal anforderbare Motorsolldrehmoment auf das Motorwunschdrehmoment gemäß der Kennlinie 14a begrenzt wird. In einer solchen Situation ist nur eine kleine Geschwindigkeitsdifferenz zur Richtgeschwindigkeit zu überbrücken, so dass eine Begrenzung der maximal anforderbaren Motorleistung auf das Motorwunschdrehmoment keine großen Komforteinbußen erzeugt. - Obwohl die Erfindung unter Bezugnahme auf bestimmte Ausführungsbeispiele beschrieben worden ist, ist es für einen Fachmann ersichtlich, dass verschiedene Änderungen ausgeführt werden können und Äquivalente als Ersatz verwendet werden können, ohne den Bereich der Erfindung zu verlassen. Zusätzlich können viele Modifikationen ausgeführt werden, ohne den zugehörigen Bereich zu verlassen. Folglich soll die Erfindung nicht auf die offenbarten Ausführungsbeispiele begrenzt sein, sondern soll alle Ausführungsbeispiele umfassen, die in den Bereich der beigefügten Patentansprüche fallen. Insbesondere beansprucht die Erfindung auch Schutz für den Gegenstand und die Merkmale der Unteransprüche unabhängig von den in Bezug genommenen Ansprüchen.
-
- 1
- Fahrpedal mit Pedalwertgeber
- 2
- Fahrpedalweg (Ausgabewert des Pedalwertgebers)
- 3
- Eingangsdaten
- 4, 40
- Steuereinheit (Recheneinheit)
- 5
- Funktion zur Bestimmung Motorwunschdrehmoment
- 6
- Funktion zur Situationserkennung
- 7
- Funktion zur Fahrpedalkennlinienanpassung
- 8
- Motorsolldrehmoment
- 9
- Antriebsmotor
- 10
- Verbrauchskennfeld
- 11
- Volllastkennlinie
- 12
- Motorwunschdrehmoment
- 13
- Fahrpedalweg, der Motorwunschdrehmoment anfordert
- 14, 14a
- Angepasste Fahrpedalkennlinie
- 15, 15a
- Abgeflachter Bereich
- Bemin
- Bemin-Kennlinie
Claims (10)
- Verfahren zur Anpassung der Fahrpedalcharakteristik bei einem Kraftfahrzeug, bei dem während eines Fahrbetriebs eine den Zusammenhang zwischen Fahrpedalweg (2) und einem angeforderten Motorsolldrehmoment (8) beschreibende Fahrpedalkennlinie angepasst wird,
gekennzeichnet durch(a) eine Bestimmung eines Motorwunschdrehmoments (12), insbesondere eines Motorwunschdrehmoments, welches einen verbrauchsoptimierten Betrieb des Kraftfahrzeugs ermöglichen würde; und(b) eine Anpassung der Fahrpedalkennlinie in Abhängigkeit von dem bestimmten Motorwunschdrehmoment (12), derart, dass die angepasste Fahrpedalkennlinie (14; 14a) in einem Bereich (b1; b2), der ein dem bestimmten Motorwunschdrehmoment (12) entsprechendes Motorsolldrehmoment (13) enthält, einen im Vergleich zur unangepassten Fahrpedalkennlinie abgeflachten Verlauf (15; 15a) aufweist. - Verfahren nach Anspruch 1, dadurch gekennzeichnet,(a) dass das Motorwunschdrehmoment (12) in Abhängigkeit vom Wirkungsgrad des Antriebsmotors, vorzugsweise mit Hilfe vorab bestimmter Kennfelder, ermittelt wird; und/oder(b) dass das Motorwunschdrehmoment (12) in Abhängigkeit von einer momentanen Motordrehzahl (n) und einer Kennlinie (Bemin) bestimmt wird, wobei die Kennlinie (Bemin) jeder Motordrehzahl dasjenige Motordrehmoment zuordnet, für das der spezifische Verbrauch minimal und/oder der Motorwirkungsgrad maximal ist.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet,(a) dass in Abhängigkeit von einer vorausschauenden Streckeninformation für einen vorausliegenden Streckenabschnitt des Kraftfahrzeugs eine Motorsolldrehmomenttrajektorie für den vorausliegenden Streckenabschnitt und/oder Zeithorizont bestimmt wird, die unter Berücksichtigung vorgegebener Randbedingungen den Kraftstoffverbrauch minimiert; und(b) dass das Motorwunschdrehmoment in Abhängigkeit von der bestimmten Motordrehmomenttrajektorie festgelegt wird.
- Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet,(a) dass die angepasste Kennlinie (14; 14a) im Bereich (b1; b2) des abgeflachten Verlaufs einen plateauartigen (15a) Verlauf aufweist; und/oder(b) dass zumindest ein Teil des abgeflachten Verlaufs innerhalb eines Bereichs zwischen 30 % und 80 % des Fahrpedalwegs (p) liegt; und/oder(c) dass der abgeflachte Verlauf (15; 15a) zumindest einen Bereich von 50 % bis 60 % des Fahrpedalwegs (p) umfasst; und/oder(d) dass der Bereich (b1; b2) des abgeflachten Verlaufs mindestens 15 %, weiter vorzugsweise mindestens 30 %, des Fahrpedalwegs umfasst.
- Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass sich der abgeflachte Bereich (15a), insbesondere der plateauartige Verlauf, bis zum Endbereich des Fahrpedalwegs erstreckt, so dass das Motorsolldrehmoment (8) auf das Motorwunschdrehmoment (12) begrenzt ist.
- Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Anpassung der Fahrpedalkennlinie in Abhängigkeit von einer Situationserkennung des Fahrzeugs und/oder der Umgebung aktivierbar ist.
- Verfahren nach Anspruch 6, dadurch gekennzeichnet, dass die Situationserkennung ermittelt, ob eine Beschleunigungssituation vorliegt und/oder ob eine Beschleunigungssituation bevorsteht, und die Anpassung der Fahrpedalkennlinie aktiviert wird, falls eine Beschleunigungssituation vorliegt oder bevorsteht.
- Verfahren nach Anspruch 7, dadurch gekennzeichnet,(a) dass eine Beschleunigungssituation vorliegt, wenn eine Fahrzeuglängsbeschleunigung einen vorgegebenen Schwellenwert überschreitet und eine Fahrzeuggeschwindigkeit eine vorgegebene Mindestgeschwindigkeit überschreitet; und/oder(b) dass eine Beschleunigungssituation bevorsteht, wenn eine aktuelle Fahrzeuggeschwindigkeit um mehr als einen vorgegebenen Differenzschwellenwert unterhalb einer Richtgeschwindigkeit oder Höchstgeschwindigkeit für einen Straßentyp, auf dem das Kraftfahrzeug momentan fährt, liegt.
- Vorrichtung (4) zur Anpassung der Fahrpedalcharakteristik bei einem Kraftfahrzeug, die ausgebildet ist, während eines Fahrbetriebs eine den Zusammenhang zwischen Fahrpedalweg (2) und einem angeforderten Motorsolldrehmoment (8) beschreibende Fahrpedalkennlinie anzupassen, dadurch kennzeichnet, dass die Vorrichtung (4) ausgebildet ist, das Verfahren nach einem der vorhergehenden Ansprüche auszuführen.
- Kraftfahrzeug, insbesondere Nutzfahrzeug, mit einer Vorrichtung (4) nach Anspruch 9.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102015011558.8A DE102015011558A1 (de) | 2015-09-02 | 2015-09-02 | Verfahren und Vorrichtung zur Anpassung einer Fahrpedalkennlinie |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3138720A1 true EP3138720A1 (de) | 2017-03-08 |
| EP3138720B1 EP3138720B1 (de) | 2020-07-22 |
Family
ID=56684414
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP16001656.4A Active EP3138720B1 (de) | 2015-09-02 | 2016-07-27 | Verfahren und vorrichtung zur anpassung einer fahrpedalkennlinie |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3138720B1 (de) |
| DE (1) | DE102015011558A1 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102022110032A1 (de) | 2022-04-26 | 2023-10-26 | Bayerische Motoren Werke Aktiengesellschaft | Boostbetrieb eines Kraftfahrzeugs mit einer elektrischen Antriebsmaschine |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1334862A2 (de) | 2002-02-07 | 2003-08-13 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Bestimmen des vom Fahrer eines Kraftfahrzeugs vorgegebenen Lastwunsches oder Bremswunsches |
| US20030172906A1 (en) * | 2002-03-12 | 2003-09-18 | Mario Kustosch | Method and arrangement for controlling an accelerator pedal in an internal combustion engine |
| US20080245338A1 (en) * | 2007-02-28 | 2008-10-09 | Uwe Bauer | Method and device for optimizing the consumption in a motor vehicle |
| DE102008011607A1 (de) | 2008-02-28 | 2009-09-03 | Robert Bosch Gmbh | Verfahren zur Anpassung der Fahrpedalcharakteristik in einem Fahrzeug |
| DE102009002373A1 (de) * | 2009-04-15 | 2010-10-21 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines Kraftfahrzeugs |
| DE102010041544A1 (de) | 2010-09-28 | 2012-03-29 | Bayerische Motoren Werke Aktiengesellschaft | Fahrerassistenzsystem zur Unterstützung des Fahrers zum verbrauchskontrollierten Fahren |
| US20150134230A1 (en) * | 2012-07-25 | 2015-05-14 | Volkswagen Aktiengesellschaft | Method for operating an internal combustion engine, and internal combustion engine |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2498929B (en) * | 2012-01-25 | 2014-05-07 | Jaguar Land Rover Ltd | Adaptive control of internal combustion engine |
-
2015
- 2015-09-02 DE DE102015011558.8A patent/DE102015011558A1/de not_active Withdrawn
-
2016
- 2016-07-27 EP EP16001656.4A patent/EP3138720B1/de active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1334862A2 (de) | 2002-02-07 | 2003-08-13 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zum Bestimmen des vom Fahrer eines Kraftfahrzeugs vorgegebenen Lastwunsches oder Bremswunsches |
| US20030172906A1 (en) * | 2002-03-12 | 2003-09-18 | Mario Kustosch | Method and arrangement for controlling an accelerator pedal in an internal combustion engine |
| US20080245338A1 (en) * | 2007-02-28 | 2008-10-09 | Uwe Bauer | Method and device for optimizing the consumption in a motor vehicle |
| DE102008011607A1 (de) | 2008-02-28 | 2009-09-03 | Robert Bosch Gmbh | Verfahren zur Anpassung der Fahrpedalcharakteristik in einem Fahrzeug |
| DE102009002373A1 (de) * | 2009-04-15 | 2010-10-21 | Zf Friedrichshafen Ag | Verfahren zum Betreiben eines Kraftfahrzeugs |
| DE102010041544A1 (de) | 2010-09-28 | 2012-03-29 | Bayerische Motoren Werke Aktiengesellschaft | Fahrerassistenzsystem zur Unterstützung des Fahrers zum verbrauchskontrollierten Fahren |
| US20150134230A1 (en) * | 2012-07-25 | 2015-05-14 | Volkswagen Aktiengesellschaft | Method for operating an internal combustion engine, and internal combustion engine |
Non-Patent Citations (1)
| Title |
|---|
| STEPHAN TERWEN: "Schriften des Instituts für Regelungs- und Steuerungssysteme", vol. 06, KARLSRUHER INSTITUT FÜR TECHNOLOGIE, article "Vorausschauende Längsregelung schwerer Lastkraftwagen" |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102015011558A1 (de) | 2017-03-02 |
| EP3138720B1 (de) | 2020-07-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102008057313B4 (de) | Verfahren und Vorrichtung zur Bestimmung eines korrigierenden Lenkmoments | |
| DE102011003423A1 (de) | Vorrichtung zur Steuerung einer Fahrzeugbewegung | |
| EP4298001B1 (de) | Verfahren und fahrerassistenzsystem zum unterstützen eines kraftfahrzeugs beim durchführen einer kurvenfahrt | |
| DE102012213933A1 (de) | Verfahren zur Steuerung eines Geschwindigkeitsregelsystems | |
| DE102013212808A1 (de) | Steuervorrichtung zum anwenden einer arbitrierung auf eine mehrzahl von empfangenen steueranfragen | |
| DE102016007838B4 (de) | Verfahren zum Steuern einer Bremsrekuperationsvorrichtung sowie Bremsrekuperationsvorrichtung | |
| DE102014009856A1 (de) | Verfahren und Vorrichtung zur Anpassung der Fahrpedalcharakteristik bei einem Kraftfahrzeug | |
| DE102019119822A1 (de) | Fahrzeugsteuerungsvorrichtung | |
| DE102015015691B4 (de) | Verfahren zum Betrieb eines Kraftfahrzeugs mit einer separat antreibbaren ersten und zweiten Achse | |
| DE102021129244A1 (de) | Fahrassistenzsystem und Verfahren zum Betreiben eines Fahrassistenzsystems | |
| DE102023102994B3 (de) | Verfahren zum Betrieb eines Kraftfahrzeugs und Kraftfahrzeug | |
| EP3947067B1 (de) | Bremsregeleinrichtung, bremsverfahren und bremssystem für ein schienenfahrzeug | |
| DE102004008265A1 (de) | Verfahren zur Antriebsschlupfregelung eines Kraftfahrzeugs | |
| WO2023072460A1 (de) | Elektronisch gesteuertes fahrgeschwindigkeitsregelsystem für kraftfahrzeuge | |
| EP3138720B1 (de) | Verfahren und vorrichtung zur anpassung einer fahrpedalkennlinie | |
| DE102006042419A1 (de) | Vorausschauendes Fahren mit ACC | |
| EP2440439A1 (de) | Verfahren zur erzeugung eines auf die fahrzeugräder eines fahrzeugs wirkenden differenzmoments | |
| DE102016209714A1 (de) | Zeitliches Strecken eines Anstiegs eines Antriebsmoments bei einem Wechsel der Betriebsart eines Hybridantriebs | |
| DE102009030165B4 (de) | Verfahren und Vorrichtung zur Berechnung eines resultierenden Stellwerts | |
| DE102009048815A1 (de) | Verfahren zum Steuern eines Antriebssystems in einem Kraftfahrzeug | |
| DE102016006213A1 (de) | Verfahren zur Durchführung eines automatischen Fahrmanövers eines Fahrzeugs und Fahrzeug | |
| EP1764277B1 (de) | Verfahren und Vorrichtung zur Geschwindigkeitsregelung eines Kraftfahrzeuges | |
| DE102019219986A1 (de) | Verfahren zum Steuern eines Automatikgetriebes | |
| DE102020215057A1 (de) | Optimierung querführender Assistenzsysteme | |
| DE102013216244B4 (de) | Verfahren zur Regelung eines Lenksystems und Lenksystem |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20170905 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20190513 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: MAN TRUCK & BUS SE |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20200303 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502016010553 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1293079 Country of ref document: AT Kind code of ref document: T Effective date: 20200815 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201022 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201023 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201022 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201123 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20201122 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502016010553 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20200731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200731 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200727 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200731 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200731 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20201022 |
|
| 26N | No opposition filed |
Effective date: 20210423 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201022 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200727 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200722 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1293079 Country of ref document: AT Kind code of ref document: T Effective date: 20210727 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210727 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20250724 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250728 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250721 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20250725 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20250725 Year of fee payment: 10 |