EP3048505A1 - Device for operating working machine - Google Patents
Device for operating working machine Download PDFInfo
- Publication number
- EP3048505A1 EP3048505A1 EP14845704.7A EP14845704A EP3048505A1 EP 3048505 A1 EP3048505 A1 EP 3048505A1 EP 14845704 A EP14845704 A EP 14845704A EP 3048505 A1 EP3048505 A1 EP 3048505A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- operating unit
- work implement
- front work
- actuators
- control lever
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005516 engineering process Methods 0.000 abstract description 6
- 238000006073 displacement reaction Methods 0.000 description 58
- 238000010586 diagram Methods 0.000 description 14
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 14
- 230000000994 depressogenic effect Effects 0.000 description 8
- 230000000694 effects Effects 0.000 description 4
- 238000010276 construction Methods 0.000 description 3
- 230000008602 contraction Effects 0.000 description 3
- 239000002699 waste material Substances 0.000 description 3
- 239000012634 fragment Substances 0.000 description 2
- 238000009412 basement excavation Methods 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
Images










Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/96—Dredgers; Soil-shifting machines mechanically-driven with arrangements for alternate or simultaneous use of different digging elements
- E02F3/963—Arrangements on backhoes for alternate use of different tools
- E02F3/964—Arrangements on backhoes for alternate use of different tools of several tools mounted on one machine
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/16—Cabins, platforms, or the like, for drivers
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2004—Control mechanisms, e.g. control levers
- E02F9/2012—Setting the functions of the control levers, e.g. changing assigned functions among operations levers, setting functions dependent on the operator or seat orientation
Definitions
- the present invention relates to a double arm type work machinery comprising two front work implements of the multijoint type and being used for demolition works of objects such as structures and wastes, civil engineering works, and so forth.
- Work machineries comprising a lower track structure having a travel structure, an upper swing structure attached to the lower track structure to be freely swingable, and a front work implement of the multijoint type attached to the upper swing structure to be freely pivotable up and down are well known as those used for structure demolition works, waste demolition works, civil engineering construction works, and so forth. Hydraulic excavators are an example of such work machineries.
- the hydraulic excavator in which the front work implement including a boom and an arm is linked to the upper swing structure to be freely pivotable up and down and a bucket is attached to the tip end of the arm to be freely pivotable up and down, is used to perform works such as excavation, loading and ground leveling.
- the hydraulic excavator is configured so that other types of works such as structure demolition works and waste demolition works can also be performed by attaching a breaker, crusher, grapple or the like to the arm instead of the bucket.
- a structure demolition work if there is only one front work implement attached to the work machinery when a structure has to be demolished by using a breaker, crusher, reinforcing bar cutter or the like, the front work implement is used naturally for the demolition of the structure and thus cannot hold the structure.
- the front work implement is used naturally for the demolition of the structure and thus cannot hold the structure.
- the structure is smashed by a breaker or the like, fragments drop from the structure and scatter around due to the momentum of the dropping.
- the fragments have to be collected and disposed of and these tasks deteriorate the efficiency.
- the object of the demolition includes a part that should be preserved, the part has to be previously suspended by using a machinery such as a crane in order to prevent the part from dropping. Workers and operations become necessary for such a preparation.
- Patent Literature 1 discloses a double arm type work machinery, in which a first front work implement of the multijoint type having a first work tool freely rotatable up and down and a second front work implement of the multijoint type having a second work tool freely rotatable up and down are attached respectively to the left and right sides of the front part of the upper swing structure to be freely pivotable up and down.
- the operating device on the left side includes a control arm bracket which is provided on the left side of the cab seat, a control arm which is attached to the control arm bracket to be freely pivotable to the left and right for commanding the left/right pivoting of the first front work implement, an armrest which is attached to the control arm so as to pivot integrally with the control arm, and a control lever which is attached to a tip end part of the control arm to extend toward the inside (cab seat's side) in a horizontal direction and to be freely pivotable up and down and back and forth for commanding the operation of the tip end of the arm of the first front work implement.
- Patent Literature 1 JP-2006-252224-A
- control lever extending toward the inside in the horizontal direction can make contact with the operator when the operator sits down on the cab seat, by which a feeling of discomfort can be caused to the operator or the control lever can be broken due to an excessive load applied thereto.
- the object of the present invention which has been made in consideration of the above-described situation, is to provide an operating device for a work machinery with which the operation of the work machinery can be performed in a manner similar to that in conventional technology and the operator can sit down on the cab seat without a hitch while avoiding the breakage caused by the contact with the control lever.
- the present invention provides an operating device for a work machinery, the work machinery comprising: a work machinery main body; a cab which is provided on the work machinery main body or outside the work machinery main body; a first front work implement and a second front work implement which are provided at the front of the work machinery main body to be driven and freely pivoted up and down; a cab seat which is provided in the cab; a left operating device which is provided on the left side of the cab seat; and a right operating device which is provided on the right side of the cab seat.
- the left operating device includes a first left operating unit and a second left operating unit provided on the first left operating unit.
- the right operating device includes a first right operating unit and a second right operating unit provided on the first right operating unit.
- the shortest distance between the first left operating unit and the first right operating unit is greater than the width of the cab seat.
- the operation of the first front work implement is performed by using the first left operating unit and the first right operating unit.
- the operation of the second front work implement is performed by using the second left operating unit and the second right operating unit.
- the operation of the work machinery can be performed in a manner similar to that in the conventional technology. Further, the avoidance of the breakage of a control lever, which has been difficult in the conventional technology, can be achieved and it becomes possible for the operator to sit down on the cab seat without a hitch. As a result, the present invention increases the comfortability of the operator and the operating life of components such as the control levers.
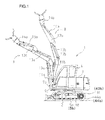
- Fig. 1 is a side view showing a double arm type hydraulic excavator as an example of a construction machinery comprising an operating device according to a first embodiment of the present invention.
- Fig. 2 is a plan view of the double arm type hydraulic excavator shown in Fig. 1 .
- the forward direction viewed from the cab seat (upper left direction in the figure) is assumed to correspond to the forward direction (front) of the machinery unless otherwise noted.
- an upper swing structure 3 is attached to a lower track structure 2 to be swingable, and a cab 4 is arranged at the front of the upper swing structure 3.
- a left front work implement A (second front work implement) and a right front work implement B (first front work implement) are provided on the left front and the right front of the cab 4, respectively.
- An engine 40, a pump 41 and some other components are arranged on the side and rear of the cab 4.
- the lower track structure 2 includes left and right travel motors 43a and 43b (the right travel motor 43b is unshown) provided respectively at the rear of left and right track frames 5a and 5b (the right track frame 5b is unshown) to be freely rotatable, and left and right crawlers 44a and 44b (the right crawler 44b is unshown) provided for the track frames 5a and 5b and the travel motors 43a and 43b.
- the left and right travel motors 43a and 43b are supplied with hydraulic fluid from the pump 41 and thereby performs rotary driving, by which the left and right crawlers 44a and 44b rotate with respect to the track frames 5a and 5b to let the double arm type hydraulic excavator 1 travel.
- the upper swing structure 3 is equipped with a swing motor 48 for its swing operation. By the rotation of the swing motor 48, the upper swing structure 3 is swung (rotated) with respect to the lower track structure 2.
- the left front work implement A includes a swing post 7a (member) which is attached to the left front of the upper swing structure 3 to be freely pivotable to the left and right, a boom 10a (member) which is attached to the swing post 7a to be freely pivotable up and down, an arm 12a (member) which is attached to the boom 10a to be freely pivotable up and down, and a grapple 14a (member) as a first work tool attached to the arm 12a to be freely rotatable up and down.
- the left front work implement A further includes a swing post cylinder 9a (actuator) which is connected to the swing post 7a and the upper swing structure 3 to pivot the swing post 7a to the left and right, a boom cylinder 11a (actuator) which is connected to the swing post 7a and the boom 10a to pivot the boom 10a up and down, an arm cylinder 13a (actuator) which is connected to the boom 10a and the arm 12a to pivot the arm 12a up and down, and a work tool cylinder 15a (actuator) which is connected to the arm 12a and the work tool 14a to rotate the work tool 14a up and down.
- the grapple shown in Figs. 1 and 2 as the work tool 14a can be arbitrarily replaced with one of other work tools (cutter, breaker, bucket, etc.) depending on the contents of the work.
- the right front work implement B is provided on the right front of the upper swing structure 3.
- the configuration of the right front work implement B is substantially bilaterally symmetrical with that of the left front work implement A, and thus repeated explanation thereof is omitted here and components of the right front work implement B will be represented by reference characters obtained by replacing the suffix "a" with "b” in the reference characters of the corresponding components of the left front work implement A.
- Fig. 3 is a side view showing an operating device which is provided on the double arm type hydraulic excavator shown in Fig. 1 .
- Fig. 4 is a front view of the operating device shown in Fig. 3 .
- a cab seat 49 is set in the cab 4, and left and right operating devices 50 and 51 are arranged respectively on the left and right sides of the cab seat 49.
- a swing pedal 58 and left and right travel pedals 59a and 59b are arranged at lower positions in front of the cab seat.
- the left operating device 50 includes a left control lever bracket 52 arranged on the left side of the cab seat 49, a left control lever 54 (first left operating unit) provided on the left control lever bracket 52 to be freely pivotable back and forth and left and right, and a left control switch 56 (second left operating unit) provided at the tip end of the left control lever 54 to be freely pivotable back and forth and left and right.
- the right operating device 51 includes a right control lever bracket 53 arranged on the right side of the cab seat 49, a right control lever 55 (first right operating unit) provided on the right control lever bracket 53 to be freely pivotable back and forth and left and right, and a right control switch 57 (second right operating unit) provided at the tip end of the right control lever 55 to be freely pivotable back and forth and left and right.
- the left control lever 54 and the right control lever 55 are arranged in parallel with the cab seat 49 so that the control levers 54 and 55 do not overlap with a seating part 491 included in the cab seat 49 and having the greatest width, for example, that is, so that the shortest distance L1 between the left control lever 54 and the right control lever 55 is greater than the width L2 of the cab seat 49.
- the left operating device 50 is equipped with a displacement sensor 541 and a displacement sensor 542 for sensing displacements of the left control lever 54 caused by the tilting of the left control lever 54 in the longitudinal (forward/backward) direction and in the transverse (leftward/rightward) direction.
- the displacement sensor 541 senses the displacement of the left control lever 54 in the longitudinal direction
- the displacement sensor 542 senses the displacement of the left control lever 54 in the transverse direction.
- the tilting of the left control lever 54 in the longitudinal (forward/backward) direction or in the transverse (leftward/rightward) direction commands the driving direction of an actuator (e.g., expansion/contraction direction of a cylinder), and the amount of the displacement of the left control lever 54 commands a speed for the actuator.
- an actuator e.g., expansion/contraction direction of a cylinder
- the right operating device 51 is also equipped with displacement sensors 551 and 552 corresponding to the displacement sensors 541 and 542, respectively.
- the forward/backward/leftward/rightward directions in which the left control lever 54, the right control lever 55, the left control switch 56 and the right control switch 57 are tilted, will hereinafter be referred to as "operating directions”.
- the left operating device 50 is further equipped with displacement sensors 561 and 562 for sensing displacements of the left control switch 56 caused by the tilting of the left control switch 56 in the longitudinal direction and in the transverse direction.
- the displacement sensor 561 senses the displacement of the left control switch 56 in the longitudinal direction
- the displacement sensor 562 senses the displacement of the left control switch 56 in the transverse direction.
- the tilting of the left control switch 56 in the longitudinal direction or in the transverse direction commands the driving direction of an actuator (e.g., expansion/contraction direction of a cylinder), and the amount of the displacement of the left control switch 56 commands a speed for the actuator.
- the right operating device 51 is also equipped with displacement sensors 571 and 572 corresponding to the displacement sensors 561 and 562, respectively.
- the swing pedal 58 is equipped with a swing pedal displacement sensor 581 for sensing the displacement of the swing pedal 58 and transmitting a corresponding signal.
- the left and right travel pedals 59a and 59b are equipped with travel pedal displacement sensors 591a and 591b for sensing the displacements of the travel pedals 59a and 59b and transmitting corresponding signals.
- Fig. 5 is a schematic diagram showing principal parts of a control system of the double arm type hydraulic excavator in the first embodiment of the present invention and the relationship between inputs and outputs of the control system.
- the control system 161 receives inputs representing the displacements from the aforementioned displacement sensors 541 and others provided for the left and right operating devices 50 and 51 in the cab 4, generates drive signals by performing prescribed calculations based on the displacements from the input systems, and outputs the generated drive signals to solenoid valves that operate the aforementioned parts of the left and right front work implements A and B.
- the sensors outputting the displacements to the control system 161 are as explained above.
- the solenoid valves receiving the outputs from the control system 161 include swing post drive solenoid valves 218a and 218b, boom drive solenoid valves 215a and 215b, arm drive solenoid valves 216a and 216b, work tool drive solenoid valves 217a and 217b, a swing drive solenoid valve 213, and travel drive solenoid valves 214a and 214b.
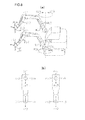
- Fig. 6 is a schematic diagram showing the relationship between the operating directions outputted from the operating device and the driving directions of the actuators of the double arm type hydraulic excavator in the first embodiment of the present invention.
- Fig. 6(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device and
- Fig. 6(b) shows the operating directions of the operating device.
- the longitudinal direction displacement sensor 541 of the left control lever 54 When the left control lever 54 is shifted (i.e., displaced) forward (111) as shown in Fig. 6(b) , the longitudinal direction displacement sensor 541 of the left control lever 54 outputs a sensing signal to a drive signal generation unit 161A in the control system 161 as shown in Fig. 5 .
- the drive signal generation unit 161A receiving the sensing signal transmits a drive signal to the solenoid valve 216b for driving a right arm 12b.
- a right arm cylinder 13b is contracted and the right arm 12b is pivoted forward (LL1) as shown in Fig. 6(a) .
- the pivoting speed of the right arm 12b is in a monotonically increasing relation (e.g., proportional relation) with the displacement inputted from the longitudinal direction displacement sensor 541, and thus the displacement sensed by the longitudinal direction displacement sensor 541 controls the speed of the pivoting of the right arm 12b.
- the longitudinal direction displacement sensor 561 of the left control switch 56 transmits a sensing signal to a drive signal generation unit 161E in the control system 161 as shown in Fig. 5 .
- the drive signal generation unit 161E receiving the sensing signal transmits a drive signal to the solenoid valve 216a for driving the left arm 12a.
- the left arm cylinder 13a is contracted and the left arm 12a is pivoted forward (LS1) as shown in Fig. 6(a) .
- the pivoting speed of the left arm 12a is in a monotonically increasing relation (e.g., proportional relation) with the displacement inputted from the longitudinal direction displacement sensor 561, and thus the displacement inputted from the longitudinal direction displacement sensor 561 controls the speed of the pivoting of the left arm 12a.
- the left control switch 56 when the left control switch 56 is shifted backward (ls2), the left arm 12a is pivoted backward (LS2).
- the left control switch 56 When the left control switch 56 is shifted leftward (ls3), the left swing post 7a is pivoted leftward (LS3).
- the left control switch 56 is shifted rightward (ls4), the left swing post 7a is pivoted rightward (LS4).
- the actuators operated (controlled) by the left control lever 54, the right control lever 55, the left control switch 56 and the right control switch 57 and the operating directions of the control levers/switches 54, 55, 56 and 57 can be set arbitrarily by changing the combination of the drive signal generation units 161A, and the solenoid valves 216a, 216b (specifically, by changing the electric wiring) in the control system 161.
- the double arm type hydraulic excavator it is also possible in the double arm type hydraulic excavator to set the actuators operated by the left control lever 54 and the right control lever 55 and the operating directions of the control levers 54 and 55 in the same way as those of conventional hydraulic excavators.
- the left front work implement A and the right front work implement B can be operated at the same time by using the left control lever 54, the left control switch 56 provided on the left control lever 54, the right control lever 55, and the right control switch 57 provided on the right control lever 55 similarly to the conventional technology.
- the shortest distance between the left control lever 54 and the right control lever 55 is greater than the seating part 491 included in the cab seat 49 and having the greatest width, for example, the operator's possibility of contacting the operating means when sitting down on the cab seat is low.
- the comfortability of the operator and the operating life of components such as the left control lever 54 and the right control lever 55 can be increased.
- the driving direction of an actuator of the right front work implement B commanded by the operating direction of the left control lever 54 and the driving direction of an actuator included in the left front work implement A commanded by the operating direction of the left control switch 56 are the same as each other, and the driving direction of an actuator of the right front work implement B commanded by the operating direction of the right control lever 55 and the driving direction of an actuator included in the left front work implement A commanded by the operating direction of the right control switch 57 are the same as each other. Therefore, the operator can perform the operations of the left and right front work implements (objects of the operations) in similar operating directions, and thus can master the operations with high efficiency.
- the actuators operated by the left control lever 54 and the right control lever 55 and the operating directions of the control levers 54 and 55 can be set in the same way as those of conventional hydraulic excavators.
- operators operating conventional hydraulic excavators can easily master the operation of the double arm type hydraulic excavator 1 without the need of memorizing new operations.
- Fig. 7 is a schematic diagram showing principal parts of a control system of a double arm type hydraulic excavator in a second embodiment of the present invention and the relationship between inputs and outputs of the control system.
- Fig. 8 is a schematic diagram showing the relationship between operation commands from the operating device and driving directions of actuators of the double arm type hydraulic excavator in the second embodiment of the present invention.
- Fig. 8(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device and
- Fig. 8(b) shows the operating directions of the operating device.
- This embodiment differs from the first embodiment only in that the operating directions of the left control switch 56 and the operating directions of the right control switch 57 have been interchanged with each other.
- the rest of the configuration is equivalent to that in the first embodiment.
- the operating directions of the left control lever 54 and the right control lever 55 are the same as those in the first embodiment as mentioned above.
- the longitudinal direction displacement sensor 561 of the left control switch 56 outputs a sensing signal to a drive signal generation unit 161G in the control system 161 as shown in Fig. 7 .
- the drive signal generation unit 161G receiving the sensing signal transmits a drive signal to the solenoid valve 215a for driving the left boom 11a.
- the left boom cylinder 11a is contracted and the left boom 10a is pivoted downward (LS1) as shown in Fig. 8(a) .
- Fig. 9 is a schematic diagram showing principal parts of a control system of a double arm type hydraulic excavator in a third embodiment of the present invention and the relationship between inputs and outputs of the control system.
- This embodiment differs from the first embodiment only in that an operation assignment switching unit 161Z, as a front work implement switching unit or an operated actuator switching unit, is provided in the control system 161.
- the rest of the configuration is equivalent to that in the first embodiment.
- the operation assignment switching unit 161Z is provided between the displacement sensors of the left control lever 54, the right control lever 55, the left control switch 56 and the right control switch 57 and the drive signal generation units.
- the operation assignment switching unit 161Z has a function of switching the signal destination (one of the drive signal generation units) to which the sensing signal obtained from each displacement sensor should be outputted.
- An unshown selector switch that can be switched to three positions R, N and C is provided in the cab 4 and is electrically connected to the operation assignment switching unit 161Z in the control system 161.
- the selector switch at the position N means that a command for no switching is issued to the operation assignment switching unit 161Z.
- the selector switch at the position R means that a switching command for having the right front work implement B (which has been operated by the left control lever 54 and the right control lever 55) operated by the left control switch 56 and the right control switch 57 and having the left front work implement A (which has been operated by the left control switch 56 and the right control switch 57) operated by the left control lever 54 and the right control lever 55 is issued to the operation assignment switching unit 161Z.
- the selector switch at the position C means that a switching command for having the left front work implement A (which has been operated by the left control lever 54 and the right control lever 55) operated by the left control switch 56 and the right control switch 57 and having the right front work implement B (which has been operated by the left control switch 56 and the right control switch 57) operated by the left control lever 54 and the right control lever 55 is issued to the operation assignment switching unit 161Z.
- the operation assignment switching unit 161Z Upon the input of a command signal from the selector switch, the operation assignment switching unit 161Z changes the assignment to the solenoid valves 216a and 216b according to the command signal.
- Fig. 10 is a front view showing an operating device which is provided on a double arm type hydraulic excavator in a fourth embodiment of the present invention.
- Fig. 11 is a schematic diagram showing principal parts of a control system of the double arm type hydraulic excavator in the fourth embodiment of the present invention and the relationship between inputs and outputs of the control system.
- This embodiment differs from the first embodiment in a left control switch 60 and a right control switch 61 having relatively low-priced configurations and in the processing of output signals from the left control switch 60 and the right control switch 61 in the control system 161.
- the rest of the configuration is equivalent to that in the first embodiment.
- each of the left and right control switches 60 and 61 includes four switches arranged in a cross-hair pattern so that a displacement can be implemented (commanded) by pressing each of the switches.
- the switches of the left control switch 60 are respectively equipped with forward/backward/leftward/rightward displacement sensors 601 - 604, while the switches of the right control switch 61 are respectively equipped with forward/backward/leftward/rightward displacement sensors 611 - 614.
- the longitudinal (forward/backward) direction or the transverse (leftward/rightward) direction in regard to the pressing of the left control switch 60 or the right control switch 61 commands the driving direction of an actuator (e.g., expansion/contraction direction of a cylinder), and the amount of displacement of the pressing commands a speed for the actuator.
- an actuator e.g., expansion/contraction direction of a cylinder
- the forward/backward/leftward/rightward directions of the left control switch 60 and the right control switch 61 will be referred to as "operating directions”.
- a displacement outputted from a front part displacement sensor 601 or a rear part displacement sensor 602 of the left control switch 60 is inputted to the drive signal generation unit 161E of the control system 161.
- the drive signal generation unit 161E calculates the driving direction and the speed of the left arm cylinder 13a and outputs the calculation result to a pertinent solenoid valve. Similar processes are conducted also by using displacements outputted from the other displacement sensors 603, 604, 611 - 614 of the left and right control switches 60 and 61.
- Fig. 12 is a schematic diagram showing the relationship between operation commands from the operating device and driving directions of actuators of the double arm type hydraulic excavator in the fourth embodiment of the present invention.
- Fig. 12(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device and
- Fig. 12(b) shows the operating directions of the operating device.
- the left control switch front part displacement sensor 601 transmits a sensing signal to the drive signal generation unit 161E in the control system 161 as shown in Fig. 11 .
- the drive signal generation unit 161E receiving the sensing signal transmits a drive signal to the left arm drive solenoid valve 216a.
- the left arm cylinder 13a is contracted and the left arm 12a is pivoted forward (LS1) as shown in Fig. 12(a) .
- the pivoting speed of the left arm 12a is in a monotonically increasing relation (e.g., proportional relation) with the displacement inputted from the left control switch front part displacement sensor 601, and thus the displacement inputted from the left control switch front part displacement sensor 601 controls the speed of the pivoting of the left arm 12a.
- the left control switch rear part displacement sensor 601 transmits a sensing signal to the drive signal generation unit 161E in the control system 161. Accordingly, the left arm cylinder is expanded and the left arm is pivoted backward (LS2).
- the left boom 10a When a front part of the right control switch 61 is depressed (rs1), the left boom 10a is pivoted forward (RS1). When a rear part of the right control switch 61 is depressed (rs2), the left boom 10a is pivoted upward (RS2). When a left part of the right control switch 61 is depressed (rs3), the left work tool 14a is pivoted downward (RS3). Further, when a right part of the right control switch 61 is depressed (rs4), the left work tool 14a is pivoted upward (RS4).
- This embodiment configured as above achieves effects similar to those of the first embodiment, while also being effective in terms of costs since the left control switch 60 and the right control switch 61 are simple in structure and low-priced.
- the right front work implement B has been described to include the swing post 7b in the first through fourth embodiments, a configuration with no swing post 7b is also possible.
- the right arm 12b is driven when the left control lever 54 is operated in the longitudinal (forward/backward) direction
- the swing motor 48 is driven when the left control lever 54 is operated in the transverse (leftward/rightward) direction.
- the right boom 10b is driven when the right control lever 55 is operated in the longitudinal (forward/backward) direction
- the right work tool 14b is driven when the right control lever 55 is operated in the transverse (leftward/rightward) direction.
- first through fourth embodiments have been configured so that the value of each operating signal can change continuously by equipping the left control switch 54 (60) and the right control switch 55 (61) with displacement sensors
- the first through fourth embodiments may also be configured to obtain the value of each operating signal as an ON/OFF value by replacing the displacement sensors with contact sensors.
- cab seat 4 is provided on the double arm type hydraulic excavator 1 in the first through fourth embodiments, it is also possible to employ a system configuration enabling remote control and provide the cab seat 4 not on the double arm type hydraulic excavator 1 but at a position remote or separate from the double arm type hydraulic excavator 1.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Operation Control Of Excavators (AREA)
- Mechanical Control Devices (AREA)
Abstract
Description
- The present invention relates to a double arm type work machinery comprising two front work implements of the multijoint type and being used for demolition works of objects such as structures and wastes, civil engineering works, and so forth.
- Work machineries comprising a lower track structure having a travel structure, an upper swing structure attached to the lower track structure to be freely swingable, and a front work implement of the multijoint type attached to the upper swing structure to be freely pivotable up and down are well known as those used for structure demolition works, waste demolition works, civil engineering construction works, and so forth. Hydraulic excavators are an example of such work machineries. The hydraulic excavator, in which the front work implement including a boom and an arm is linked to the upper swing structure to be freely pivotable up and down and a bucket is attached to the tip end of the arm to be freely pivotable up and down, is used to perform works such as excavation, loading and ground leveling. The hydraulic excavator is configured so that other types of works such as structure demolition works and waste demolition works can also be performed by attaching a breaker, crusher, grapple or the like to the arm instead of the bucket.
- However, these hydraulic excavators of the standard type, having only one front work implement attached to the work machinery, involve the following problems: When parts have to be removed from a car in a car dismantling work by using a dismantling attachment, if there is only one front work implement attached to the work machinery, the front work implement is used naturally for the removal of car parts and thus cannot firmly fix the car body. Thus, the car body exhibits unstable behavior when parts are removed with the dismantling attachment, and consequently, the workability is deteriorated.
- Further, in a structure demolition work, if there is only one front work implement attached to the work machinery when a structure has to be demolished by using a breaker, crusher, reinforcing bar cutter or the like, the front work implement is used naturally for the demolition of the structure and thus cannot hold the structure. Thus, each time the structure is smashed by a breaker or the like, fragments drop from the structure and scatter around due to the momentum of the dropping. The fragments have to be collected and disposed of and these tasks deteriorate the efficiency. Furthermore, in cases where the object of the demolition includes a part that should be preserved, the part has to be previously suspended by using a machinery such as a crane in order to prevent the part from dropping. Workers and operations become necessary for such a preparation.
- To eliminate these problems arising from works, there is a technology disclosed in
Patent Literature 1.Patent Literature 1 discloses a double arm type work machinery, in which a first front work implement of the multijoint type having a first work tool freely rotatable up and down and a second front work implement of the multijoint type having a second work tool freely rotatable up and down are attached respectively to the left and right sides of the front part of the upper swing structure to be freely pivotable up and down. - In the double arm type work machinery disclosed in
Patent Literature 1, two operating devices for operating the first front work implement and the second front work implement are arranged on the left and right sides of the cab seat in the cab, one on each side of the cab seat. The configuration of these operating devices is as follows: For example, the operating device on the left side includes a control arm bracket which is provided on the left side of the cab seat, a control arm which is attached to the control arm bracket to be freely pivotable to the left and right for commanding the left/right pivoting of the first front work implement, an armrest which is attached to the control arm so as to pivot integrally with the control arm, and a control lever which is attached to a tip end part of the control arm to extend toward the inside (cab seat's side) in a horizontal direction and to be freely pivotable up and down and back and forth for commanding the operation of the tip end of the arm of the first front work implement. - Patent Literature 1:
JP-2006-252224-A - However, with such a configuration, the control lever extending toward the inside in the horizontal direction can make contact with the operator when the operator sits down on the cab seat, by which a feeling of discomfort can be caused to the operator or the control lever can be broken due to an excessive load applied thereto.
- The object of the present invention, which has been made in consideration of the above-described situation, is to provide an operating device for a work machinery with which the operation of the work machinery can be performed in a manner similar to that in conventional technology and the operator can sit down on the cab seat without a hitch while avoiding the breakage caused by the contact with the control lever.
- To achieve the above object, the present invention provides an operating device for a work machinery, the work machinery comprising: a work machinery main body; a cab which is provided on the work machinery main body or outside the work machinery main body; a first front work implement and a second front work implement which are provided at the front of the work machinery main body to be driven and freely pivoted up and down; a cab seat which is provided in the cab; a left operating device which is provided on the left side of the cab seat; and a right operating device which is provided on the right side of the cab seat. The left operating device includes a first left operating unit and a second left operating unit provided on the first left operating unit. The right operating device includes a first right operating unit and a second right operating unit provided on the first right operating unit. The shortest distance between the first left operating unit and the first right operating unit is greater than the width of the cab seat. The operation of the first front work implement is performed by using the first left operating unit and the first right operating unit. The operation of the second front work implement is performed by using the second left operating unit and the second right operating unit.
- According to the present invention, by use of the left operating device and the right operating device described above, the operation of the work machinery can be performed in a manner similar to that in the conventional technology. Further, the avoidance of the breakage of a control lever, which has been difficult in the conventional technology, can be achieved and it becomes possible for the operator to sit down on the cab seat without a hitch. As a result, the present invention increases the comfortability of the operator and the operating life of components such as the control levers.
-
-
Fig. 1 is a side view showing a double arm type hydraulic excavator as an example of a construction machinery comprising an operating device according to a first embodiment of the present invention. -
Fig. 2 is a plan view of the double arm type hydraulic excavator shown inFig. 1 . -
Fig. 3 is a side view showing an operating device which is provided on the double arm type hydraulic excavator shown inFig. 1 . -
Fig. 4 is a front view of the operating device shown inFig. 3 . -
Fig. 5 is a schematic diagram showing principal parts of a control system of the double arm type hydraulic excavator in the first embodiment of the present invention and the relationship between inputs and outputs of the control system. -
Fig. 6 is a schematic diagram showing the relationship between operating directions outputted from the operating device and driving directions of actuators of the double arm type hydraulic excavator in the first embodiment of the present invention.Fig. 6(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device andFig. 6(b) shows the operating directions of the operating device. -
Fig. 7 is a schematic diagram showing principal parts of a control system of a double arm type hydraulic excavator in a second embodiment of the present invention and the relationship between inputs and outputs of the control system. -
Fig. 8 is a schematic diagram showing the relationship between operation commands from the operating device and driving directions of actuators of the double arm type hydraulic excavator in the second embodiment of the present invention.Fig. 8(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device andFig. 8(b) shows the operating directions of the operating device. -
Fig. 9 is a schematic diagram showing principal parts of a control system of a double arm type hydraulic excavator in a third embodiment of the present invention and the relationship between inputs and outputs of the control system. -
Fig. 10 is a front view showing an operating device which is provided on a double arm type hydraulic excavator in a fourth embodiment of the present invention. -
Fig. 11 is a schematic diagram showing principal parts of a control system of the double arm type hydraulic excavator in the fourth embodiment of the present invention and the relationship between inputs and outputs of the control system. -
Fig. 12 is a schematic diagram showing the relationship between operation commands from the operating device and driving directions of actuators of the double arm type hydraulic excavator in the fourth embodiment of the present invention.Fig. 12(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device andFig. 12(b) shows the operating directions of the operating device. - Referring now to the drawings, a description will be given in detail of preferred embodiments in accordance with the present invention.
-
Fig. 1 is a side view showing a double arm type hydraulic excavator as an example of a construction machinery comprising an operating device according to a first embodiment of the present invention.Fig. 2 is a plan view of the double arm type hydraulic excavator shown inFig. 1 . In the following explanation, the forward direction viewed from the cab seat (upper left direction in the figure) is assumed to correspond to the forward direction (front) of the machinery unless otherwise noted. - In the double arm type hydraulic excavator 1 (work machinery) shown in
Fig. 1 , anupper swing structure 3 is attached to alower track structure 2 to be swingable, and acab 4 is arranged at the front of theupper swing structure 3. A left front work implement A (second front work implement) and a right front work implement B (first front work implement) are provided on the left front and the right front of thecab 4, respectively. An engine 40, a pump 41 and some other components are arranged on the side and rear of thecab 4. - The
lower track structure 2 includes left andright travel motors right travel motor 43b is unshown) provided respectively at the rear of left andright track frames right track frame 5b is unshown) to be freely rotatable, and left andright crawlers 44a and 44b (theright crawler 44b is unshown) provided for thetrack frames travel motors right travel motors right crawlers 44a and 44b rotate with respect to thetrack frames hydraulic excavator 1 travel. - The
upper swing structure 3 is equipped with aswing motor 48 for its swing operation. By the rotation of theswing motor 48, theupper swing structure 3 is swung (rotated) with respect to thelower track structure 2. - As shown in
Figs. 1 and2 , the left front work implement A includes aswing post 7a (member) which is attached to the left front of theupper swing structure 3 to be freely pivotable to the left and right, aboom 10a (member) which is attached to theswing post 7a to be freely pivotable up and down, anarm 12a (member) which is attached to theboom 10a to be freely pivotable up and down, and agrapple 14a (member) as a first work tool attached to thearm 12a to be freely rotatable up and down. - The left front work implement A further includes a swing post cylinder 9a (actuator) which is connected to the
swing post 7a and theupper swing structure 3 to pivot theswing post 7a to the left and right, aboom cylinder 11a (actuator) which is connected to theswing post 7a and theboom 10a to pivot theboom 10a up and down, anarm cylinder 13a (actuator) which is connected to theboom 10a and thearm 12a to pivot thearm 12a up and down, and awork tool cylinder 15a (actuator) which is connected to thearm 12a and thework tool 14a to rotate thework tool 14a up and down. Incidentally, the grapple shown inFigs. 1 and2 as thework tool 14a can be arbitrarily replaced with one of other work tools (cutter, breaker, bucket, etc.) depending on the contents of the work. - The right front work implement B is provided on the right front of the
upper swing structure 3. The configuration of the right front work implement B is substantially bilaterally symmetrical with that of the left front work implement A, and thus repeated explanation thereof is omitted here and components of the right front work implement B will be represented by reference characters obtained by replacing the suffix "a" with "b" in the reference characters of the corresponding components of the left front work implement A. -
Fig. 3 is a side view showing an operating device which is provided on the double arm type hydraulic excavator shown inFig. 1 .Fig. 4 is a front view of the operating device shown inFig. 3 . - A
cab seat 49 is set in thecab 4, and left andright operating devices cab seat 49. Aswing pedal 58 and left andright travel pedals - The
left operating device 50 includes a leftcontrol lever bracket 52 arranged on the left side of thecab seat 49, a left control lever 54 (first left operating unit) provided on the leftcontrol lever bracket 52 to be freely pivotable back and forth and left and right, and a left control switch 56 (second left operating unit) provided at the tip end of theleft control lever 54 to be freely pivotable back and forth and left and right. - Similarly, the
right operating device 51 includes a rightcontrol lever bracket 53 arranged on the right side of thecab seat 49, a right control lever 55 (first right operating unit) provided on the rightcontrol lever bracket 53 to be freely pivotable back and forth and left and right, and a right control switch 57 (second right operating unit) provided at the tip end of theright control lever 55 to be freely pivotable back and forth and left and right. - Here, the
left control lever 54 and theright control lever 55 are arranged in parallel with thecab seat 49 so that the control levers 54 and 55 do not overlap with aseating part 491 included in thecab seat 49 and having the greatest width, for example, that is, so that the shortest distance L1 between theleft control lever 54 and theright control lever 55 is greater than the width L2 of thecab seat 49. - The
left operating device 50 is equipped with adisplacement sensor 541 and adisplacement sensor 542 for sensing displacements of theleft control lever 54 caused by the tilting of theleft control lever 54 in the longitudinal (forward/backward) direction and in the transverse (leftward/rightward) direction. Thedisplacement sensor 541 senses the displacement of theleft control lever 54 in the longitudinal direction, while thedisplacement sensor 542 senses the displacement of theleft control lever 54 in the transverse direction. The tilting of theleft control lever 54 in the longitudinal (forward/backward) direction or in the transverse (leftward/rightward) direction commands the driving direction of an actuator (e.g., expansion/contraction direction of a cylinder), and the amount of the displacement of theleft control lever 54 commands a speed for the actuator. Theright operating device 51 is also equipped withdisplacement sensors displacement sensors left control lever 54, theright control lever 55, theleft control switch 56 and theright control switch 57 are tilted, will hereinafter be referred to as "operating directions". - The
left operating device 50 is further equipped withdisplacement sensors left control switch 56 caused by the tilting of theleft control switch 56 in the longitudinal direction and in the transverse direction. Thedisplacement sensor 561 senses the displacement of theleft control switch 56 in the longitudinal direction, while thedisplacement sensor 562 senses the displacement of theleft control switch 56 in the transverse direction. The tilting of theleft control switch 56 in the longitudinal direction or in the transverse direction (i.e., the aforementioned operating direction) commands the driving direction of an actuator (e.g., expansion/contraction direction of a cylinder), and the amount of the displacement of theleft control switch 56 commands a speed for the actuator. Theright operating device 51 is also equipped withdisplacement sensors displacement sensors - The
swing pedal 58 is equipped with a swingpedal displacement sensor 581 for sensing the displacement of theswing pedal 58 and transmitting a corresponding signal. The left andright travel pedals pedal displacement sensors travel pedals -
Fig. 5 is a schematic diagram showing principal parts of a control system of the double arm type hydraulic excavator in the first embodiment of the present invention and the relationship between inputs and outputs of the control system. - The
control system 161 receives inputs representing the displacements from theaforementioned displacement sensors 541 and others provided for the left andright operating devices cab 4, generates drive signals by performing prescribed calculations based on the displacements from the input systems, and outputs the generated drive signals to solenoid valves that operate the aforementioned parts of the left and right front work implements A and B. - The sensors outputting the displacements to the
control system 161 are as explained above. The solenoid valves receiving the outputs from thecontrol system 161 include swing postdrive solenoid valves drive solenoid valves 216a and 216b, work tooldrive solenoid valves drive solenoid valve 213, and traveldrive solenoid valves 214a and 214b. - Next, the operation of the first embodiment will be described below.
-
Fig. 6 is a schematic diagram showing the relationship between the operating directions outputted from the operating device and the driving directions of the actuators of the double arm type hydraulic excavator in the first embodiment of the present invention.Fig. 6(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device andFig. 6(b) shows the operating directions of the operating device. - When the
left control lever 54 is shifted (i.e., displaced) forward (111) as shown inFig. 6(b) , the longitudinaldirection displacement sensor 541 of theleft control lever 54 outputs a sensing signal to a drivesignal generation unit 161A in thecontrol system 161 as shown inFig. 5 . The drivesignal generation unit 161A receiving the sensing signal transmits a drive signal to the solenoid valve 216b for driving aright arm 12b. According to the drive signal, a right arm cylinder 13b is contracted and theright arm 12b is pivoted forward (LL1) as shown inFig. 6(a) . In this case, the pivoting speed of theright arm 12b is in a monotonically increasing relation (e.g., proportional relation) with the displacement inputted from the longitudinaldirection displacement sensor 541, and thus the displacement sensed by the longitudinaldirection displacement sensor 541 controls the speed of the pivoting of theright arm 12b. - Similarly, when the
left control lever 54 is shifted backward (112), theright arm 12b is pivoted backward (LL2). When theleft control lever 54 is shifted leftward (113), aright swing post 7b is pivoted leftward (LL3). Further, when theleft control lever 54 is shifted rightward (114), theright swing post 7b is pivoted rightward (LL4). - Similarly to the case of the
left control lever 54, when theright control lever 55 is shifted forward (rl1), aright boom 10b is pivoted downward (RL1). When theright control lever 55 is shifted backward (rl2), theright boom 10b is pivoted upward (RL2). When theright control lever 55 is shifted leftward (rl3), a right work tool 14b is pivoted backward (RL3). Further, when theright control lever 55 is shifted rightward (rl4), the right work tool 14b is pivoted forward (RL4). - Further, when the
left control switch 56 is shifted forward (ls1) as shown inFig. 6(b) , the longitudinaldirection displacement sensor 561 of theleft control switch 56 transmits a sensing signal to a drivesignal generation unit 161E in thecontrol system 161 as shown inFig. 5 . The drivesignal generation unit 161E receiving the sensing signal transmits a drive signal to thesolenoid valve 216a for driving theleft arm 12a. According to the drive signal, theleft arm cylinder 13a is contracted and theleft arm 12a is pivoted forward (LS1) as shown inFig. 6(a) . In this case, the pivoting speed of theleft arm 12a is in a monotonically increasing relation (e.g., proportional relation) with the displacement inputted from the longitudinaldirection displacement sensor 561, and thus the displacement inputted from the longitudinaldirection displacement sensor 561 controls the speed of the pivoting of theleft arm 12a. - Similarly, when the
left control switch 56 is shifted backward (ls2), theleft arm 12a is pivoted backward (LS2). When theleft control switch 56 is shifted leftward (ls3), theleft swing post 7a is pivoted leftward (LS3). When theleft control switch 56 is shifted rightward (ls4), theleft swing post 7a is pivoted rightward (LS4). - Similarly to the case of the
left control switch 56, when theright control switch 57 is shifted forward (rs1), theleft boom 10a is pivoted downward (RS1). When theright control switch 57 is shifted backward (rs2), theleft boom 10a is pivoted downward (RS2). When theright control switch 57 is shifted leftward (rs3), theleft work tool 14a is pivoted downward (RS3). When theright control switch 57 is shifted rightward (rs4), theleft work tool 14a is pivoted upward (RS4). - It should be noted that the actuators operated (controlled) by the
left control lever 54, theright control lever 55, theleft control switch 56 and theright control switch 57 and the operating directions of the control levers/switches 54, 55, 56 and 57 can be set arbitrarily by changing the combination of the drivesignal generation units 161A, and thesolenoid valves 216a, 216b (specifically, by changing the electric wiring) in thecontrol system 161. Thus, it goes without saying that it is also possible in the double arm type hydraulic excavator to set the actuators operated by theleft control lever 54 and theright control lever 55 and the operating directions of the control levers 54 and 55 in the same way as those of conventional hydraulic excavators. - According to this embodiment configured as above, the left front work implement A and the right front work implement B can be operated at the same time by using the
left control lever 54, theleft control switch 56 provided on theleft control lever 54, theright control lever 55, and theright control switch 57 provided on theright control lever 55 similarly to the conventional technology. Further, since the shortest distance between theleft control lever 54 and theright control lever 55 is greater than theseating part 491 included in thecab seat 49 and having the greatest width, for example, the operator's possibility of contacting the operating means when sitting down on the cab seat is low. Thus, the comfortability of the operator and the operating life of components such as theleft control lever 54 and theright control lever 55 can be increased. - Further, in this embodiment, the driving direction of an actuator of the right front work implement B commanded by the operating direction of the
left control lever 54 and the driving direction of an actuator included in the left front work implement A commanded by the operating direction of theleft control switch 56 are the same as each other, and the driving direction of an actuator of the right front work implement B commanded by the operating direction of theright control lever 55 and the driving direction of an actuator included in the left front work implement A commanded by the operating direction of theright control switch 57 are the same as each other. Therefore, the operator can perform the operations of the left and right front work implements (objects of the operations) in similar operating directions, and thus can master the operations with high efficiency. - Furthermore, in this embodiment, the actuators operated by the
left control lever 54 and theright control lever 55 and the operating directions of the control levers 54 and 55 can be set in the same way as those of conventional hydraulic excavators. Thus, operators operating conventional hydraulic excavators can easily master the operation of the double arm typehydraulic excavator 1 without the need of memorizing new operations. -
Fig. 7 is a schematic diagram showing principal parts of a control system of a double arm type hydraulic excavator in a second embodiment of the present invention and the relationship between inputs and outputs of the control system.Fig. 8 is a schematic diagram showing the relationship between operation commands from the operating device and driving directions of actuators of the double arm type hydraulic excavator in the second embodiment of the present invention.Fig. 8(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device andFig. 8(b) shows the operating directions of the operating device. - This embodiment differs from the first embodiment only in that the operating directions of the
left control switch 56 and the operating directions of theright control switch 57 have been interchanged with each other. The rest of the configuration is equivalent to that in the first embodiment. - The operating directions of the
left control lever 54 and theright control lever 55 are the same as those in the first embodiment as mentioned above. However, when theleft control switch 56 is shifted (i.e., displaced) forward (ls1) as shown inFig. 8(b) , the longitudinaldirection displacement sensor 561 of theleft control switch 56 outputs a sensing signal to a drivesignal generation unit 161G in thecontrol system 161 as shown inFig. 7 . The drivesignal generation unit 161G receiving the sensing signal transmits a drive signal to the solenoid valve 215a for driving theleft boom 11a. According to the drive signal, theleft boom cylinder 11a is contracted and theleft boom 10a is pivoted downward (LS1) as shown inFig. 8(a) . When theleft control switch 56 is shifted backward (ls2), theleft boom 10a is pivoted upward (LS2). When theleft control switch 56 is shifted leftward (ls3), theleft work tool 14a is pivoted forward (LS3). Further, when theleft control switch 56 is shifted rightward (ls4), theleft work tool 14a is pivoted backward (LS4). - Similarly, when the
right control switch 57 is shifted forward (rs1), theleft arm 12a is pivoted upward (RS1). When theright control switch 57 is shifted backward (rs2), theleft arm 12a is pivoted downward (RS2). When theright control switch 57 is shifted leftward (rs3), theleft swing post 7a is pivoted leftward (RS3). Further, when theright control switch 57 is shifted rightward (rs4), theleft swing post 7a is pivoted rightward (RS4). - The effects of this embodiment configured as above differs from those of the first embodiment as follows: The driving direction of an actuator of the right front work implement B commanded by the operating direction of the
left control lever 54 and the driving direction of an actuator included in the left front work implement A commanded by the operating direction of theright control switch 57 are the same as each other; and the driving direction of an actuator of the right front work implement B commanded by the operating direction of theright control lever 55 and the driving direction of an actuator included in the left front work implement A commanded by the operating direction of theleft control switch 56 are the same as each other. Therefore, it becomes easier for the operator to move the left front work implement A and the right front work implement B (objects of the operations) at the same time. Since similar configurations are employed also for the swing posts, the arms and the work tools, the work is facilitated when the operator operates corresponding left and right actuators at the same time. -
Fig. 9 is a schematic diagram showing principal parts of a control system of a double arm type hydraulic excavator in a third embodiment of the present invention and the relationship between inputs and outputs of the control system. - This embodiment differs from the first embodiment only in that an operation
assignment switching unit 161Z, as a front work implement switching unit or an operated actuator switching unit, is provided in thecontrol system 161. The rest of the configuration is equivalent to that in the first embodiment. - As shown in
Fig. 9 , the operationassignment switching unit 161Z is provided between the displacement sensors of theleft control lever 54, theright control lever 55, theleft control switch 56 and theright control switch 57 and the drive signal generation units. The operationassignment switching unit 161Z has a function of switching the signal destination (one of the drive signal generation units) to which the sensing signal obtained from each displacement sensor should be outputted. - An unshown selector switch that can be switched to three positions R, N and C is provided in the
cab 4 and is electrically connected to the operationassignment switching unit 161Z in thecontrol system 161. - The selector switch at the position N means that a command for no switching is issued to the operation
assignment switching unit 161Z. - The selector switch at the position R means that a switching command for having the right front work implement B (which has been operated by the
left control lever 54 and the right control lever 55) operated by theleft control switch 56 and theright control switch 57 and having the left front work implement A (which has been operated by theleft control switch 56 and the right control switch 57) operated by theleft control lever 54 and theright control lever 55 is issued to the operationassignment switching unit 161Z. - The selector switch at the position C means that a switching command for having the left front work implement A (which has been operated by the
left control lever 54 and the right control lever 55) operated by theleft control switch 56 and theright control switch 57 and having the right front work implement B (which has been operated by theleft control switch 56 and the right control switch 57) operated by theleft control lever 54 and theright control lever 55 is issued to the operationassignment switching unit 161Z. - Upon the input of a command signal from the selector switch, the operation
assignment switching unit 161Z changes the assignment to thesolenoid valves 216a and 216b according to the command signal. - Incidentally, while the switching between the left front work implement A and the right front work implement B has been illustrated in this embodiment, other types of switching (e.g., switching between actuators) may also be conducted.
- According to this embodiment configured as above, effects similar to those of the first embodiment can be achieved while also allowing the operator to select an actuator that should be driven by each sensing signal sent from the operating device. Therefore, the operator can select an operation assignment that facilitates the operation. Consequently, the workability is improved.
-
Fig. 10 is a front view showing an operating device which is provided on a double arm type hydraulic excavator in a fourth embodiment of the present invention.Fig. 11 is a schematic diagram showing principal parts of a control system of the double arm type hydraulic excavator in the fourth embodiment of the present invention and the relationship between inputs and outputs of the control system. - This embodiment differs from the first embodiment in a
left control switch 60 and aright control switch 61 having relatively low-priced configurations and in the processing of output signals from theleft control switch 60 and theright control switch 61 in thecontrol system 161. The rest of the configuration is equivalent to that in the first embodiment. - As shown in
Fig. 10 , each of the left and right control switches 60 and 61 includes four switches arranged in a cross-hair pattern so that a displacement can be implemented (commanded) by pressing each of the switches. The switches of theleft control switch 60 are respectively equipped with forward/backward/leftward/rightward displacement sensors 601 - 604, while the switches of theright control switch 61 are respectively equipped with forward/backward/leftward/rightward displacement sensors 611 - 614. The longitudinal (forward/backward) direction or the transverse (leftward/rightward) direction in regard to the pressing of theleft control switch 60 or theright control switch 61 commands the driving direction of an actuator (e.g., expansion/contraction direction of a cylinder), and the amount of displacement of the pressing commands a speed for the actuator. Incidentally, the forward/backward/leftward/rightward directions of theleft control switch 60 and theright control switch 61 will be referred to as "operating directions". - As shown in
Fig. 11 , a displacement outputted from a frontpart displacement sensor 601 or a rearpart displacement sensor 602 of theleft control switch 60 is inputted to the drivesignal generation unit 161E of thecontrol system 161. The drivesignal generation unit 161E calculates the driving direction and the speed of theleft arm cylinder 13a and outputs the calculation result to a pertinent solenoid valve. Similar processes are conducted also by using displacements outputted from theother displacement sensors - Next, the operation of the fourth embodiment will be described below.
-
Fig. 12 is a schematic diagram showing the relationship between operation commands from the operating device and driving directions of actuators of the double arm type hydraulic excavator in the fourth embodiment of the present invention.Fig. 12(a) shows the driving directions of the double arm type hydraulic excavator corresponding to the operating directions of the operating device andFig. 12(b) shows the operating directions of the operating device. - As mentioned above, the operating directions of the
left control lever 54 and theright control lever 55 are the same as those in the first embodiment, and thus repeated explanation thereof is omitted here. - When a front part of the
left control switch 60 is depressed (ls1) as shown inFig. 12(b) , the left control switch frontpart displacement sensor 601 transmits a sensing signal to the drivesignal generation unit 161E in thecontrol system 161 as shown inFig. 11 . The drivesignal generation unit 161E receiving the sensing signal transmits a drive signal to the left armdrive solenoid valve 216a. According to the drive signal, theleft arm cylinder 13a is contracted and theleft arm 12a is pivoted forward (LS1) as shown inFig. 12(a) . In this case, the pivoting speed of theleft arm 12a is in a monotonically increasing relation (e.g., proportional relation) with the displacement inputted from the left control switch frontpart displacement sensor 601, and thus the displacement inputted from the left control switch frontpart displacement sensor 601 controls the speed of the pivoting of theleft arm 12a. Conversely, when a rear part of theleft control switch 60 is depressed (ls2), the left control switch rearpart displacement sensor 601 transmits a sensing signal to the drivesignal generation unit 161E in thecontrol system 161. Accordingly, the left arm cylinder is expanded and the left arm is pivoted backward (LS2). - Similarly, when a left part of the
left control switch 60 is depressed (ls3), theleft swing post 7a is pivoted leftward (LS3). When a right part of theleft control switch 60 is depressed (ls4), theleft swing post 7a is pivoted rightward (LS4). - When a front part of the
right control switch 61 is depressed (rs1), theleft boom 10a is pivoted forward (RS1). When a rear part of theright control switch 61 is depressed (rs2), theleft boom 10a is pivoted upward (RS2). When a left part of theright control switch 61 is depressed (rs3), theleft work tool 14a is pivoted downward (RS3). Further, when a right part of theright control switch 61 is depressed (rs4), theleft work tool 14a is pivoted upward (RS4). - This embodiment configured as above achieves effects similar to those of the first embodiment, while also being effective in terms of costs since the
left control switch 60 and theright control switch 61 are simple in structure and low-priced. - While the right front work implement B has been described to include the
swing post 7b in the first through fourth embodiments, a configuration with noswing post 7b is also possible. In this case, it is also possible to drive theswing motor 48 of theupper swing structure 3 by using the sensing signal from the transversedirection displacement sensor 542 of theleft control lever 54. Accordingly, theright arm 12b is driven when theleft control lever 54 is operated in the longitudinal (forward/backward) direction, while theswing motor 48 is driven when theleft control lever 54 is operated in the transverse (leftward/rightward) direction. Further, in this configuration, theright boom 10b is driven when theright control lever 55 is operated in the longitudinal (forward/backward) direction, while the right work tool 14b is driven when theright control lever 55 is operated in the transverse (leftward/rightward) direction. - While the first through fourth embodiments have been configured so that the value of each operating signal can change continuously by equipping the left control switch 54 (60) and the right control switch 55 (61) with displacement sensors, the first through fourth embodiments may also be configured to obtain the value of each operating signal as an ON/OFF value by replacing the displacement sensors with contact sensors.
- While the
cab seat 4 is provided on the double arm typehydraulic excavator 1 in the first through fourth embodiments, it is also possible to employ a system configuration enabling remote control and provide thecab seat 4 not on the double arm typehydraulic excavator 1 but at a position remote or separate from the double arm typehydraulic excavator 1. - Finally, it goes without saying that the embodiments described above can also be properly implemented in combination with each other.
Claims (5)
- An operating device for a work machinery, the work machinery comprising:a work machinery main body;a cab which is provided on the work machinery main body or outside the work machinery main body;a first front work implement and a second front work implement which are provided at the front of the work machinery main body to be driven and freely pivoted up and down;a cab seat which is provided in the cab;a left operating device which is provided on the left side of the cab seat; anda right operating device which is provided on the right side of the cab seat, characterized in that:the left operating device includes a first left operating unit and a second left operating unit provided on the first left operating unit,the right operating device includes a first right operating unit and a second right operating unit provided on the first right operating unit,the shortest distance between the first left operating unit and the first right operating unit is greater than the width of the cab seat,the operation of the first front work implement is performed by using the first left operating unit and the first right operating unit, andthe operation of the second front work implement is performed by using the second left operating unit and the second right operating unit.
- The operating device for a work machinery according to claim 1, wherein:the first front work implement has a link structure made by linking a plurality of members together and a plurality of actuators provided for driving the link structure,the second front work implement has a link structure made by linking a plurality of members together and a plurality of actuators provided for driving the link structure,the first left operating unit and the second left operating unit of the left operating device and the first right operating unit and the second right operating unit of the right operating device are configured to command driving directions of the actuators,the driving direction commanded by the first left operating unit for one of the actuators in the first front work implement and the driving direction commanded by the second left operating unit for one of the actuators in the second front work implement are the same as each other, andthe driving direction commanded by the first right operating unit for another one of the actuators in the first front work implement and the driving direction commanded by the second right operating unit for another one of the actuators in the second front work implement are the same as each other.
- The operating device for a work machinery according to claim 1, wherein:the first front work implement has a link structure made by linking a plurality of members together and a plurality of actuators provided for driving the link structure,the second front work implement has a link structure made by linking a plurality of members together and a plurality of actuators provided for driving the link structure,the first left operating unit and the second left operating unit of the left operating device and the first right operating unit and the second right operating unit of the right operating device are configured to command driving directions of the actuators,the driving direction commanded by the first left operating unit for one of the actuators in the first front work implement and the driving direction commanded by the second right operating unit for one of the actuators in the second front work implement are the same as each other, andthe driving direction commanded by the first right operating unit for another one of the actuators in the first front work implement and the driving direction commanded by the second left operating unit for another one of the actuators in the second front work implement are the same as each other.
- The operating device for a work machinery according to claim 1, wherein the work machinery has a front work implement switching unit which switches the object of the operation by use of the first left operating unit and the first right operating unit from the first front work implement to the second front work implement while switching the object of the operation by use of the second left operating unit and the second right operating unit from the second front work implement to the first front work implement.
- The operating device for a work machinery according to claim 1, wherein:the first front work implement has a link structure made by linking a plurality of members together and a plurality of actuators provided for driving the link structure,the second front work implement has a link structure made by linking a plurality of members together and a plurality of actuators provided for driving the link structure, andthe work machinery has an operated actuator switching unit which switches the object of the operation by use of the first left operating unit and the first right operating unit from the actuators in the first front work implement to the actuators in the second front work implement while switching the object of the operation by use of the second left operating unit and the second right operating unit from the actuators in the second front work implement to the actuators in the first front work implement.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013193500A JP5969444B2 (en) | 2013-09-18 | 2013-09-18 | Operation equipment for work machines |
| PCT/JP2014/074726 WO2015041300A1 (en) | 2013-09-18 | 2014-09-18 | Device for operating working machine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP3048505A1 true EP3048505A1 (en) | 2016-07-27 |
| EP3048505A4 EP3048505A4 (en) | 2017-05-10 |
| EP3048505B1 EP3048505B1 (en) | 2019-01-30 |
Family
ID=52688947
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14845704.7A Not-in-force EP3048505B1 (en) | 2013-09-18 | 2014-09-18 | Device for operating the double arm of a working machine |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3048505B1 (en) |
| JP (1) | JP5969444B2 (en) |
| CN (1) | CN105452975B (en) |
| WO (1) | WO2015041300A1 (en) |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3207771B2 (en) * | 1996-07-26 | 2001-09-10 | 株式会社エフエフシー | Hydraulic working machine |
| JPH11181815A (en) * | 1997-12-19 | 1999-07-06 | Hitachi Constr Mach Co Ltd | Working machine |
| JP3798572B2 (en) * | 1999-04-19 | 2006-07-19 | 日立建機株式会社 | Construction machinery cab |
| JP3314067B2 (en) * | 1999-12-17 | 2002-08-12 | 株式会社タカハシワークス | Twin arm working machine with arm lever |
| GB2412362A (en) * | 2002-08-22 | 2005-09-28 | Caterpillar Inc | Method for a work machine having more than one function |
| JP4587848B2 (en) * | 2005-03-11 | 2010-11-24 | 日立建機株式会社 | Operation equipment for work machines |
| JP4562583B2 (en) * | 2005-04-26 | 2010-10-13 | 日立建機株式会社 | Work machine |
| JP4823767B2 (en) * | 2006-05-31 | 2011-11-24 | 日立建機株式会社 | Double-arm work machine |
| US7784581B1 (en) * | 2006-09-14 | 2010-08-31 | Deere & Company | Machine control interlocks for an electrohydraulically controlled vehicle |
| US7878288B2 (en) * | 2008-03-14 | 2011-02-01 | Clark Equipment Company | Swing-out joystick |
| JP5493137B2 (en) * | 2011-06-23 | 2014-05-14 | 日立建機株式会社 | Operation device for double-arm work machine |
-
2013
- 2013-09-18 JP JP2013193500A patent/JP5969444B2/en not_active Expired - Fee Related
-
2014
- 2014-09-18 EP EP14845704.7A patent/EP3048505B1/en not_active Not-in-force
- 2014-09-18 CN CN201480044235.9A patent/CN105452975B/en not_active Expired - Fee Related
- 2014-09-18 WO PCT/JP2014/074726 patent/WO2015041300A1/en active Application Filing
Non-Patent Citations (1)
| Title |
|---|
| See references of WO2015041300A1 * |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015041300A1 (en) | 2015-03-26 |
| EP3048505B1 (en) | 2019-01-30 |
| CN105452975A (en) | 2016-03-30 |
| CN105452975B (en) | 2017-09-01 |
| JP5969444B2 (en) | 2016-08-17 |
| JP2015060403A (en) | 2015-03-30 |
| EP3048505A4 (en) | 2017-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3438354B1 (en) | Mechanical shovel | |
| EP2980317A1 (en) | Multiple control patterns for hydraulically operated machines with hand and foot controls | |
| EP3535458B1 (en) | System and method for defining a zone of operation for a lift arm | |
| KR102118386B1 (en) | Working machine | |
| KR100221808B1 (en) | Hydraulic driving apparatus of hydraulic shovel | |
| JP2018048503A (en) | Control device for construction machine | |
| EP3704311B1 (en) | Control system for power machine | |
| US20070209356A1 (en) | Method for providing priority to steering wheel on machines with steering wheel and joystick | |
| CN203768956U (en) | Single-movable-arm machine provided with double-arm device | |
| JP2000034745A (en) | Construction machine | |
| JP2010235020A (en) | Working machine | |
| AU2021370868A1 (en) | Coordinated actuator control by an operator control | |
| DE202011003220U1 (en) | Control for working machines with boom | |
| EP3048505B1 (en) | Device for operating the double arm of a working machine | |
| US9429174B1 (en) | Enabling valve having separate float and lift down positions | |
| JP4163137B2 (en) | Hybrid excavator operating device | |
| JP6180764B2 (en) | Hydraulic circuit for construction machine and control method thereof | |
| JP2000027238A (en) | Travel operating device for hydraulic traveling vehicle | |
| US11898324B1 (en) | Adaptive control system for autonomous control of powered earth-moving vehicles | |
| EP3919689B1 (en) | Work machine | |
| JP5934669B2 (en) | Hydraulic drive unit for construction machinery | |
| JPH10292417A (en) | Front control device for construction machine | |
| KR101877059B1 (en) | Control apparatus in a construction machine | |
| CN114960825A (en) | Hydraulic circuit for controlling excavator to walk by using handle | |
| JPH1060947A (en) | Operating device for hydraulic shovel |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20160204 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAX | Request for extension of the european patent (deleted) | ||
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20170412 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: G05G 9/047 20060101ALI20170406BHEP Ipc: E02F 3/96 20060101ALI20170406BHEP Ipc: E02F 9/20 20060101ALI20170406BHEP Ipc: E02F 3/30 20060101ALI20170406BHEP Ipc: G05G 1/01 20080401AFI20170406BHEP Ipc: E02F 9/16 20060101ALI20170406BHEP Ipc: B25J 13/02 20060101ALI20170406BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20180720 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| RIC2 | Information provided on ipc code assigned after grant |
Ipc: G05G 9/047 20060101ALI20170406BHEP Ipc: E02F 3/96 20060101ALI20170406BHEP Ipc: E02F 3/30 20060101ALI20170406BHEP Ipc: B25J 13/02 20060101ALI20170406BHEP Ipc: G05G 1/01 20080401AFI20170406BHEP Ipc: E02F 9/20 20060101ALI20170406BHEP Ipc: E02F 9/16 20060101ALI20170406BHEP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1093762 Country of ref document: AT Kind code of ref document: T Effective date: 20190215 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602014040548 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20190130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190430 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190530 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1093762 Country of ref document: AT Kind code of ref document: T Effective date: 20190130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190501 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190530 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190430 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602014040548 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| 26N | No opposition filed |
Effective date: 20191031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190918 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190918 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20190930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140918 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20210811 Year of fee payment: 8 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20190130 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20220621 Year of fee payment: 9 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20220918 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220918 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602014040548 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240403 |