EP2803388A1 - Kinematic system of the machine for treating, rehabilitating and sports training of the spine and thorax muscles of the human body - Google Patents
Kinematic system of the machine for treating, rehabilitating and sports training of the spine and thorax muscles of the human body Download PDFInfo
- Publication number
- EP2803388A1 EP2803388A1 EP13461531.9A EP13461531A EP2803388A1 EP 2803388 A1 EP2803388 A1 EP 2803388A1 EP 13461531 A EP13461531 A EP 13461531A EP 2803388 A1 EP2803388 A1 EP 2803388A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- transmission
- machine
- backward
- elements
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 210000003205 muscle Anatomy 0.000 title claims abstract description 14
- 210000000038 chest Anatomy 0.000 title claims abstract description 8
- 230000007246 mechanism Effects 0.000 claims abstract description 35
- 230000005540 biological transmission Effects 0.000 claims abstract description 30
- 230000001105 regulatory effect Effects 0.000 claims description 4
- 230000008859 change Effects 0.000 claims description 3
- 230000033001 locomotion Effects 0.000 description 24
- 238000000034 method Methods 0.000 description 9
- 206010039722 scoliosis Diseases 0.000 description 5
- 238000011282 treatment Methods 0.000 description 5
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 238000005728 strengthening Methods 0.000 description 4
- 230000033228 biological regulation Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 210000004705 lumbosacral region Anatomy 0.000 description 3
- 210000004197 pelvis Anatomy 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 208000020307 Spinal disease Diseases 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 201000010099 disease Diseases 0.000 description 2
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 2
- 210000003041 ligament Anatomy 0.000 description 2
- 230000003019 stabilising effect Effects 0.000 description 2
- 208000032170 Congenital Abnormalities Diseases 0.000 description 1
- 206010049816 Muscle tightness Diseases 0.000 description 1
- 210000003489 abdominal muscle Anatomy 0.000 description 1
- 230000036770 blood supply Effects 0.000 description 1
- 210000003169 central nervous system Anatomy 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000007850 degeneration Effects 0.000 description 1
- 210000002249 digestive system Anatomy 0.000 description 1
- 230000003467 diminishing effect Effects 0.000 description 1
- 210000003414 extremity Anatomy 0.000 description 1
- 210000003128 head Anatomy 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000002045 lasting effect Effects 0.000 description 1
- 210000002414 leg Anatomy 0.000 description 1
- 230000005923 long-lasting effect Effects 0.000 description 1
- 230000009984 peri-natal effect Effects 0.000 description 1
- 230000037081 physical activity Effects 0.000 description 1
- 238000000554 physical therapy Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000276 sedentary effect Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 210000000278 spinal cord Anatomy 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000001356 surgical procedure Methods 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
- 208000024891 symptom Diseases 0.000 description 1
- 230000003313 weakening effect Effects 0.000 description 1
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0292—Stretching or bending or torsioning apparatus for exercising for the spinal column
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H1/0218—Drawing-out devices
- A61H1/0229—Drawing-out devices by reducing gravity forces normally applied to the body, e.g. by lifting or hanging the body or part of it
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/0087—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with a seat or torso support moving during the exercise, e.g. reformers
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/14—Platforms for reciprocating rotating motion about a vertical axis, e.g. axis through the middle of the platform
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/02—Exercising apparatus specially adapted for particular parts of the body for the abdomen, the spinal column or the torso muscles related to shoulders (e.g. chest muscles)
- A63B23/0233—Muscles of the back, e.g. by an extension of the body against a resistance, reverse crunch
- A63B23/0238—Spinal column
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B69/00—Training appliances or apparatus for special sports
- A63B69/0064—Attachments on the trainee preventing falling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H1/00—Apparatus for passive exercising; Vibrating apparatus; Chiropractic devices, e.g. body impacting devices, external devices for briefly extending or aligning unbroken bones
- A61H1/02—Stretching or bending or torsioning apparatus for exercising
- A61H2001/0203—Rotation of a body part around its longitudinal axis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/12—Driving means
- A61H2201/1253—Driving means driven by a human being, e.g. hand driven
- A61H2201/1261—Driving means driven by a human being, e.g. hand driven combined with active exercising of the patient
- A61H2201/1269—Passive exercise driven by movement of healthy limbs
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1628—Pelvis
- A61H2201/1633—Seat
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/1635—Hand or arm, e.g. handle
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/164—Feet or leg, e.g. pedal
- A61H2201/1642—Holding means therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1602—Physical interface with patient kind of interface, e.g. head rest, knee support or lumbar support
- A61H2201/165—Wearable interfaces
- A61H2201/1652—Harness
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/16—Physical interface with patient
- A61H2201/1657—Movement of interface, i.e. force application means
- A61H2201/1671—Movement of interface, i.e. force application means rotational
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B2023/003—Exercising apparatus specially adapted for particular parts of the body by torsion of the body part around its longitudinal axis
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B2023/006—Exercising apparatus specially adapted for particular parts of the body for stretching exercises
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2208/00—Characteristics or parameters related to the user or player
- A63B2208/02—Characteristics or parameters related to the user or player posture
- A63B2208/0228—Sitting on the buttocks
- A63B2208/0233—Sitting on the buttocks in 90/90 position, like on a chair
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/09—Adjustable dimensions
Definitions
- the item of the present innovation relates to a kinematic system and the device for implementing this system. It is devoted to use in treating, rehabilitating and sports training of the spine and thorax muscles of the human body.
- the human spine is a very complex system, which allows to keep an upright position of the body. It also constitutes the element for absorbing shocks (thus guarding the central nervous system) and protects the spinal cord. All spinal diseases, such as scoliosis or degeneration, impair all the functions of the spine, which in turn has a negative impact on the functions of many other human systems such as nervous, muscles or digestive systems.
- scoliosis One of the most common disease, which can appear as soon as in the childhood, is scoliosis. It can result from improper foetal development, but it is very often connected with child's unhealthy lifestyle. Proper and in time rehabilitation may cure, or at least stop the process of spine curving and save the patient from the serious surgery.
- Scoliosis rehabilitation is a long lasting and complicated process. It requires the application of many treatments: physiotherapy and kinesitherapy. Said kinesitherapy is connected with practising physical exercises, which aim at improving the spinal flexion at the same time lowering the improper muscle tensions and increasing the strength of the stabilising muscles. Such exercises may consist of active or passive movements against particular axes of the human body - sagittal axis, vertical axis and horizontal axis.
- One of the known methods of strengthening the thorax muscles is an exercise consisting of rotation of the spine round the vertical axis. The patient, sitting on the firm seat and keeping his/her hands on the handles, has to perform rotating movements. This exercise allows to strengthen mostly the lumbar muscles.
- Exercise machine proposed by the RehabDynamics Company is an example of a solution for that kind of exercise.
- Another example of a machine for treatment of the scoliosis, which utilizes the multidimensional movement is a machine presented in the patent application PL391612 .
- This method is based on imposing the rotary movement on the patient's spine.
- the treated person stands on the platform twisted into one side and with both hands holds the handle above him/her.
- This handle is twisted into the opposite side. Additionally there comes a twist of the platform and the handle in the lateral plane done by the straining elements.
- the patients tries to untwist the body posture and thus he/she applies active rehabilitation.
- the limitation of the said machine is a possibility of replacing the rotary movement of the spine (a desired movement) by the movement of the limbs only, which results in improper performance of the rehabilitating exercise.
- a very popular method of rehabilitating the people with scoliosis is so called traction. It is a delicate, axial stretching of chosen parts of the spine, which in turn leads to moving apart the articular surfaces of neighbouring vertebrae. This procedure is used in the treatment and relief of symptoms of clinical disease of the spine caused by the narrowing of the intervertebral space and straining of other structures (eg. intervertebral joints and ligaments). The traction of the spine is often used together with other methods of treatment.
- Traction is very often done by the physiotherapist, who uses only his hands. It is not a very effective activity because of limited strength that a man is able to generate and because of time limitations. That is why people more and more often use machines that enable them to conduct such exercise.
- An example of such a machine is the one presented in the patent application ES2025407.
- the traction is done by the suspending the patient in the machine. This is a passive method. The patient does not perform any exercises during the treatment. It means that in spite of improvement of the posture the effect may be short lasting without the strengthening of the muscles.
- the patent CN101947175 presents the machine which makes it possible to perform the bending and twisting movements of the lumbar spine.
- the device looks like a table divided into sections supporting the head, chest, pelvis and legs.
- the section which supports the head enables the traction of the cervical spine.
- the bending movements in the coronal plane and sagittal plane are performed by the movement of the head section and chest section. Both sections remain rigid in relation to each other.
- the rotation of the lumbar spine is performed by the rotary movement of the section supporting the pelvis and legs.
- Those sections also remain rigid in relation to each other. All the movements are made with the use of the applied drive.
- the patient does the exercise passively, which may not result in strengthening the back muscles.
- Another example may be the machine presented in the patent application JP2001212163 . It enables the traction of a patient both - in the sitting and standing position. In the course of traction the rotary movements of the pelvis are applied with the simultaneous pressure and massage of the lumbar spine.
- the aim of the present invention is to construct a kinematic system and a machine based on that system, which would join the traction and the backward rotation and which would allow to perform both those exercises simultaneously. It will not only allow to increase the progress of the rehabilitation but will also reduce the amount of time which should be devoted for this rehabilitation.
- the kinematic system of this machine whose axe is basically put vertically, consists of rotary elements, the seat, off-load frame and rotary arm(s).
- the rotary seat is connect with the rotary arm(s) by the means of backward mechanism.
- the backward mechanism consists of two backward elements connected with the elements of transmission ratios.
- an off-load frame used for suspending the user, is mounted at the top of the machine.
- the elements of gear transmission, belt transmission, friction gear or backward joint mechanism are used for transmission ratio of the backward mechanism.
- the transmission ratio preferably is a gear transmission, belt transmission, friction gear or backward joint mechanism.
- the axis of the unit rotation preferably is vertical and coincidental with the rotation of the patient's spine.
- the backward mechanism contains transmission, preferably bevel gear, belt or friction transmission
- one gear of the transmission is firmly coupled to the arm(s) of the machine by the means of firm housing.
- the said gear is connected to the second gear of the transmission unit by the means of transmission element - counter drive gears articulately mounted on a rigid frame connected to the base of the machine.
- This second gear of the transmission unit is firmly connected to the seat.
- the backward mechanism optionally comprises the bevel gear with three rows of teeth which differ with the number of teeth. With the use of the clutch it is possible to switch the reduction gear or multiplicative gear. This possibility permits to change the angle of the seat rotation to angle of arms rotation ratio.
- the backward mechanism in which an joint mechanism is used, has two crosses mounted axially on the column and the third cross between them which does not rotate.
- the crosses are connected to one another with the means of ball joints.
- the lower cross is firmly coupled to the arm(s) and the upper cross is firmly coupled to the seat.
- the middle cross preferably is the one with adjustable height for changing the proportion between the angles of seat rotation and arm(s) rotation.
- the machine is mounted on a base which consists, for example, of bowed legs.
- An off-load frame with a set of lines and pulleys is used for suspending the user of the machine.
- a suspension ring is mounted along the axis of rotation of the device.
- the regulation of the off-load may be done by the movable off-load frame controlled by the means of an engine or a servomotor or by a rigid off-load frame, where the regulation is done by the means of a pulling line pulled along the frame and through pulleys and a manual winch.
- the arm(s), held by the user with his/her hands, are attached to the base with elastic elements.
- the kinematic system described above permits backward rotary exercises with simultaneous off-load of the spine.
- a proper performance of the exercise will result in strengthening the thorax muscles responsible for stabilising the spine as well as will improve the blood supply to the spine, at the same time lowering the pressure on the vertebral discs and diminishing the friction between the vertebrae surfaces during the exercise.
- the kinematic system defines movements done by the working parts of the machine.
- the course of the component movements and geometric coupling are called the motion structure.
- the mechanism which allows to obtain needed coupling in the motion structure is an internal kinematic chain.
- the kinematic chain is defined as a set of mechanisms which transfer the driving force from its source to the specific part of the mechanism. In the mechanism in accordance with the present invention there are both: mechanical and nonmechanical couplings.
- the kinematic chain it is a whole unit, that is its mechanical part and not-mechanical part, which provides a proper coupling.
- the machine comprises the base 1, the backward system 2 in a housing 3, arms 4, seat 5 with footrests 6 and a security belt 7, which secures the patient's legs in such a way that he/she sits firmly during the exercise.
- the base comprises four legs - placed in an even distance from one another and bent at 90 degree angle-and a fifth one, which is longer and placed at the back of the machine.
- the fifth leg is used to stabilise the machine.
- the user is stabilised in the harness 12 which is suspended on the loop 13, where also is the a gouging component for measuring the off-load 14.
- the backward mechanism 2 which does the backward rotary movement in the embodiment of the invention is made basing on the kinematic chain shown in the fig. 3 .
- the rotary element 15 is joined with the arms of the machine 4.
- the motion of the arms caused by the patient results in transmission of the rotation - by the means of the transmitting elements 16 - onto the second rotary element of the backward mechanism 17 which is joined with the seat 5.
- Fig. 4 presents an example of realisation of the kinematic chain model in accordance with the embodiment of the invention.
- the mechanism comprises two bevel gears elements 15a and 17a with the same module and with the gear ratio from 0,1 to 1 - optimally chosen for the process of rehabilitation.
- the wheel from the first gear 15a is connected with the arms of the mechanism 4 by the means of rigid cover 18.
- the arms movement caused by the patient results in transmitting the rotation, via transmission elements - three toothed wheels 16a, mounted articulately on a rigid frame 19 joined with the base 1 of the machine - to the second part of
- fig.1 and fig. 2 a double bevel gear was used in order to execute and connect the rotary movement of the seat 5 with the arms 4 of the machine.
- a rigid off-load frame 8 with attached lines 9 and pulleys 10 together with a manual winch 11 was also used in order to enable performance of a traction by an accompanying person, for example a doctor.
- the level of the off-load can be controlled by the operator by the means of elastic element, a linear scale, placed between the harness and the line.
- the arms 4 are connected with the lower cross 15b, while the seat 5 is connected with the upper cross 17b.
- Both crosses 15b and 17b are placed in an axis oriented manner on the column 20.
- On the said column there is also a cross 16b mounted in such a way that it cannot rotate round the column. All three crosses are connected to one another by the means of bars 16c with the use of ball joints 16d.
- Rotation of the lower cross 15b results in deflection of the bars 16c round the joint on the middle cross 16d and causes the backward rotation of the upper cross 17b.
- the movement of the middle cross 16b along the column axis 20 results in the change of the ratio of the angle of rotation between the lower cross 15b and the upper cross 17b.
- a movable off-load frame 21 was also used apart from the double bevel gear used in order to execute and connect the rotary movement of the seat 5 with the arms 4 of the machine.
- a servomotor or electric engine 22 with automatically controlled off-load level was used as an operating device.
- the elastic elements 23 were mounted between the arms 4 and the base 1 in order to evoke resistance during exercises.
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Neurology (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Pain & Pain Management (AREA)
- Epidemiology (AREA)
- Pulmonology (AREA)
- Orthopedics, Nursing, And Contraception (AREA)
- Rehabilitation Tools (AREA)
Abstract
Kinematic system for treating, rehabilitating and sports training of the spine and thorax muscles of the human body is equipped with a rotary seat (5), which is connected with the rotary arm(s) (4) by the means of a backward mechanism (2). Said backward unit comprises two rotary backward elements (15, 15a, 15b, and 17, 17a, 17b) connected with the elements of transmission (16, 16a, 16b, 16c, 16d). Additionally along the axis at the top of the mechanism there is a off-load frame (8) used for suspending the user of this mechanism.
Description
- The item of the present innovation relates to a kinematic system and the device for implementing this system. It is devoted to use in treating, rehabilitating and sports training of the spine and thorax muscles of the human body.
- The human spine is a very complex system, which allows to keep an upright position of the body. It also constitutes the element for absorbing shocks (thus guarding the central nervous system) and protects the spinal cord. All spinal diseases, such as scoliosis or degeneration, impair all the functions of the spine, which in turn has a negative impact on the functions of many other human systems such as nervous, muscles or digestive systems.
- Spinal diseases may result from congenital defects, injuries (both: perinatal and those that occurred in the course of life), illnesses and, more and more often nowadays, from unhealthy lifestyle. Sedentary lifestyle and less physical activity as well as improper performance of such activities as lifting the objects, lead to undesired changes in such mechanical system as our spine. Mentioned changes are connected, among others, with the weakening of the muscles responsible for the stabilisation of the spine. When the back muscles and the abdominal muscles are no longer able to properly stabilise and reduce loads of the spine there is more strain on the ligaments, vertebrae and intervertebral discs.
- One of the most common disease, which can appear as soon as in the childhood, is scoliosis. It can result from improper foetal development, but it is very often connected with child's unhealthy lifestyle. Proper and in time rehabilitation may cure, or at least stop the process of spine curving and save the patient from the serious surgery.
- Scoliosis rehabilitation is a long lasting and complicated process. It requires the application of many treatments: physiotherapy and kinesitherapy. Said kinesitherapy is connected with practising physical exercises, which aim at improving the spinal flexion at the same time lowering the improper muscle tensions and increasing the strength of the stabilising muscles. Such exercises may consist of active or passive movements against particular axes of the human body - sagittal axis, vertical axis and horizontal axis.
- One of the known methods of strengthening the thorax muscles is an exercise consisting of rotation of the spine round the vertical axis. The patient, sitting on the firm seat and keeping his/her hands on the handles, has to perform rotating movements. This exercise allows to strengthen mostly the lumbar muscles. Exercise machine proposed by the RehabDynamics Company is an example of a solution for that kind of exercise.
- Another example of a machine for treatment of the scoliosis, which utilizes the multidimensional movement is a machine presented in the patent application
PL391612 - A very popular method of rehabilitating the people with scoliosis is so called traction. It is a delicate, axial stretching of chosen parts of the spine, which in turn leads to moving apart the articular surfaces of neighbouring vertebrae. This procedure is used in the treatment and relief of symptoms of clinical disease of the spine caused by the narrowing of the intervertebral space and straining of other structures (eg. intervertebral joints and ligaments). The traction of the spine is often used together with other methods of treatment.
- Traction is very often done by the physiotherapist, who uses only his hands. It is not a very effective activity because of limited strength that a man is able to generate and because of time limitations. That is why people more and more often use machines that enable them to conduct such exercise. An example of such a machine is the one presented in the patent application ES2025407. The traction is done by the suspending the patient in the machine. This is a passive method. The patient does not perform any exercises during the treatment. It means that in spite of improvement of the posture the effect may be short lasting without the strengthening of the muscles.
- The machine which joins the traction with other exercises is presented in the patent
PL173405 - The patent
CN101947175 presents the machine which makes it possible to perform the bending and twisting movements of the lumbar spine. The device looks like a table divided into sections supporting the head, chest, pelvis and legs. The section which supports the head enables the traction of the cervical spine. The bending movements in the coronal plane and sagittal plane are performed by the movement of the head section and chest section. Both sections remain rigid in relation to each other. The rotation of the lumbar spine is performed by the rotary movement of the section supporting the pelvis and legs. Those sections also remain rigid in relation to each other. All the movements are made with the use of the applied drive. The patient does the exercise passively, which may not result in strengthening the back muscles. - Another example may be the machine presented in the patent application
JP2001212163 - The aim of the present invention is to construct a kinematic system and a machine based on that system, which would join the traction and the backward rotation and which would allow to perform both those exercises simultaneously. It will not only allow to increase the progress of the rehabilitation but will also reduce the amount of time which should be devoted for this rehabilitation.
- The kinematic system of this machine, whose axe is basically put vertically, consists of rotary elements, the seat, off-load frame and rotary arm(s). The rotary seat is connect with the rotary arm(s) by the means of backward mechanism. At the same time the backward mechanism consists of two backward elements connected with the elements of transmission ratios. Additionally an off-load frame, used for suspending the user, is mounted at the top of the machine. The elements of gear transmission, belt transmission, friction gear or backward joint mechanism are used for transmission ratio of the backward mechanism. The transmission ratio preferably is a gear transmission, belt transmission, friction gear or backward joint mechanism. The axis of the unit rotation preferably is vertical and coincidental with the rotation of the patient's spine. In the embodiment of the machine, in which the backward mechanism contains transmission, preferably bevel gear, belt or friction transmission, one gear of the transmission is firmly coupled to the arm(s) of the machine by the means of firm housing. The said gear is connected to the second gear of the transmission unit by the means of transmission element - counter drive gears articulately mounted on a rigid frame connected to the base of the machine. This second gear of the transmission unit is firmly connected to the seat. The backward mechanism optionally comprises the bevel gear with three rows of teeth which differ with the number of teeth. With the use of the clutch it is possible to switch the reduction gear or multiplicative gear. This possibility permits to change the angle of the seat rotation to angle of arms rotation ratio. The backward mechanism, in which an joint mechanism is used, has two crosses mounted axially on the column and the third cross between them which does not rotate. The crosses are connected to one another with the means of ball joints. The lower cross is firmly coupled to the arm(s) and the upper cross is firmly coupled to the seat. The middle cross preferably is the one with adjustable height for changing the proportion between the angles of seat rotation and arm(s) rotation. The machine is mounted on a base which consists, for example, of bowed legs. An off-load frame with a set of lines and pulleys is used for suspending the user of the machine. At the end of that frame a suspension ring is mounted along the axis of rotation of the device. The regulation of the off-load may be done by the movable off-load frame controlled by the means of an engine or a servomotor or by a rigid off-load frame, where the regulation is done by the means of a pulling line pulled along the frame and through pulleys and a manual winch. Optionally the arm(s), held by the user with his/her hands, are attached to the base with elastic elements.
- The kinematic system described above permits backward rotary exercises with simultaneous off-load of the spine. A proper performance of the exercise will result in strengthening the thorax muscles responsible for stabilising the spine as well as will improve the blood supply to the spine, at the same time lowering the pressure on the vertebral discs and diminishing the friction between the vertebrae surfaces during the exercise.
- The embodiment of the present invention is shown in the drawings where:
-
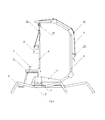
Fig.1 is a front view of the exercise machine in accordance with the innovation with a bevel gear and a manual regulation of the off-load. -
Fig.2 is a side view of the machine. -
Fig.3 presents a schematic view of the kinematic system which comprises block arrangement of the backward mechanism. -
Fig.4 presents the construction of the backward mechanism in the embodiment of the invention with the use of the bevel gear, whileFig. 5 and6 show the same mechanism with the use of joint backward mechanism. -
Fig.7 a and b shows two views of the mechanism embodiment with the frame used for patient's traction in a movable version regulated by the means of servomotor mounted at the base. - The kinematic system defines movements done by the working parts of the machine. The course of the component movements and geometric coupling are called the motion structure. The mechanism which allows to obtain needed coupling in the motion structure, otherwise called the kinematic system, is an internal kinematic chain. The kinematic chain is defined as a set of mechanisms which transfer the driving force from its source to the specific part of the mechanism. In the mechanism in accordance with the present invention there are both: mechanical and nonmechanical couplings. The kinematic chain it is a whole unit, that is its mechanical part and not-mechanical part, which provides a proper coupling. The machine comprises the
base 1, thebackward system 2 in ahousing 3,arms 4,seat 5 withfootrests 6 and asecurity belt 7, which secures the patient's legs in such a way that he/she sits firmly during the exercise. The base comprises four legs - placed in an even distance from one another and bent at 90 degree angle-and a fifth one, which is longer and placed at the back of the machine. The fifth leg is used to stabilise the machine. From the base of the machine upward there is the off-load frame 8 with a set oflines 9 and pulleys 10 at the top, regulated for example by the means of themanual winch 11. The user is stabilised in theharness 12 which is suspended on theloop 13, where also is the a gouging component for measuring the off-load 14. Thebackward mechanism 2, which does the backward rotary movement in the embodiment of the invention is made basing on the kinematic chain shown in thefig. 3 . Therotary element 15 is joined with the arms of themachine 4. The motion of the arms caused by the patient results in transmission of the rotation - by the means of the transmitting elements 16 - onto the second rotary element of thebackward mechanism 17 which is joined with theseat 5.Fig. 4 presents an example of realisation of the kinematic chain model in accordance with the embodiment of the invention. The mechanism comprises twobevel gears elements first gear 15a is connected with the arms of themechanism 4 by the means ofrigid cover 18. The arms movement caused by the patient results in transmitting the rotation, via transmission elements - threetoothed wheels 16a, mounted articulately on arigid frame 19 joined with thebase 1 of the machine - to the second part of thetransmission 17a connected to theseat 5 - In the embodiment of the invention
fig.1 andfig. 2 a double bevel gear was used in order to execute and connect the rotary movement of theseat 5 with thearms 4 of the machine. A rigid off-load frame 8 with attachedlines 9 and pulleys 10 together with amanual winch 11 was also used in order to enable performance of a traction by an accompanying person, for example a doctor. The level of the off-load can be controlled by the operator by the means of elastic element, a linear scale, placed between the harness and the line. - In the embodiment of the backward joint system (
fig. 5 andfig. 6 ) thearms 4 are connected with thelower cross 15b, while theseat 5 is connected with theupper cross 17b. Both crosses 15b and 17b are placed in an axis oriented manner on thecolumn 20. On the said column there is also a cross 16b mounted in such a way that it cannot rotate round the column. All three crosses are connected to one another by the means ofbars 16c with the use ofball joints 16d. Rotation of thelower cross 15b results in deflection of thebars 16c round the joint on themiddle cross 16d and causes the backward rotation of theupper cross 17b. The movement of themiddle cross 16b along thecolumn axis 20 results in the change of the ratio of the angle of rotation between thelower cross 15b and theupper cross 17b. - In another embodiment of the invention (
fig. 7 a and b) apart from the double bevel gear used in order to execute and connect the rotary movement of theseat 5 with thearms 4 of the machine, a movable off-load frame 21 was also used. A servomotor orelectric engine 22 with automatically controlled off-load level was used as an operating device. Additionally theelastic elements 23 were mounted between thearms 4 and thebase 1 in order to evoke resistance during exercises.
Claims (11)
- Kinematic system of the machine for treating, rehabilitating and sports training of the spine and thorax muscles of the human body in which the axis of the said machine is basically vertical and the machine comprises rotary elements, seat, off-load frame, rotary arm(s), wherein a rotary seat (5) is connected with a rotary arm(s) (4) by the means of backward mechanism (2), while the said backward mechanism includes two backward rotary elements (15, 15a, 15b, and 17, 17a, 17b) connected to a transmission elements (16, 16a, 16b, 16c, 16d), additionally there is an off -load frame (8) for suspending the user of the machine mounted along the axis of the system.
- The system as defined in claim 1, wherein the rotary elements (15, 17) consist of gear transmission, belt transmission, friction transmission or elements of joint mechanism.
- The system as defined in claim 1, wherein the transmission elements (16) of preferably regulated backward mechanism (2) are gear transmission, belt transmission, friction transmission or elements of joint mechanism.
- The system as defined in claim 1, wherein the axis or rotation of the system is preferably vertical and coincidental with the axial rotation of the patient's spine.
- The system as defined in claim 1, wherein the backward mechanism contains transmission, preferably bevel gear, belt transmission or friction transmission, in which the first wheel (15a) of the transmission is firmly coupled to the arm(s) (4) of the machine by the means of firm housing (18). The said wheel is connected to the second wheel (17a) of the gear unit by the means of a counter drive gears (16a) and articulately mounted on a rigid frame (19) connected to the base of the machine (1), while the second gear (17a) of the transmission is firmly connected to the seat (5).
- The system as defined in claim 5, wherein the backward mechanism comprises the gear, where the rotary elements preferably with a changeable number of teeth on the toothed wheel rim permit to change the proportion between the angles of the seat rotation and arms rotation.
- The system as defined in claim 1, wherein the backward mechanism (2) preferably contains a joint mechanism, in which two crosses (15b, 17b) are axially mounted on the column (20) and another unmovable cross (16b) is mounted between them. The crosses are connected to one another with bars (16c) by the means of ball joints (16d). The lower cross (15b) is firmly coupled to the arm(s) (4), and the upper cross (17b) is firmly coupled to the seat (5).
- The system as defined in claim 7, wherein backward joint mechanism contains the middle cross (16b), preferably with adjustable height for changing the proportion between the angles of seat (5) rotation and arm(s) (4) rotation.
- The system as defined in claim 1, wherein an off - load frame (8) for suspending the user of the machine comprises a line (9) pulled through the pulleys (10) and along the off-load frame (8) and the manual winch (11), where the end of the said line is mounted along the rotation axis of the device.
- The system as defined in claim 1, wherein the movable off-load frame (21) is supported and regulated by the means of an engine or a servomotor (22).
- The system as defined in claim 1, wherein the elastic elements (23) are mounted between the arms (4) and the base (1) in order to evoke resistance during exercises.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13461531.9A EP2803388A1 (en) | 2013-05-13 | 2013-05-13 | Kinematic system of the machine for treating, rehabilitating and sports training of the spine and thorax muscles of the human body |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP13461531.9A EP2803388A1 (en) | 2013-05-13 | 2013-05-13 | Kinematic system of the machine for treating, rehabilitating and sports training of the spine and thorax muscles of the human body |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| EP2803388A1 true EP2803388A1 (en) | 2014-11-19 |
Family
ID=48874240
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13461531.9A Withdrawn EP2803388A1 (en) | 2013-05-13 | 2013-05-13 | Kinematic system of the machine for treating, rehabilitating and sports training of the spine and thorax muscles of the human body |
Country Status (1)
| Country | Link |
|---|---|
| EP (1) | EP2803388A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105999635A (en) * | 2016-06-29 | 2016-10-12 | 辽宁工程技术大学 | Comprehensive physical education and training equipment |
| CN110314335A (en) * | 2019-08-05 | 2019-10-11 | 南京信息工程大学 | A kind of Yoga formula vertebra extends, torsion device |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4385761A (en) * | 1981-02-19 | 1983-05-31 | Max Rice | Weighted rotatable therapeutic exercise device |
| ES2025407A6 (en) | 1990-06-15 | 1992-03-16 | Sastre Fernandez Santos | Process and machine for physiotherapy in scoliosis and deviations of the spine in general |
| PL173405B1 (en) | 1992-10-27 | 1998-03-31 | Mdp Invention | Vertebral column and other body parts treating, rehabilitating and training apparatus |
| JP2001212163A (en) | 2000-02-02 | 2001-08-07 | Atsutaka Nakajima | Special traction treatment device |
| CN101947175A (en) | 2009-07-10 | 2011-01-19 | 高福懋 | Multifunctional back motion device |
| DE202011102658U1 (en) * | 2011-07-01 | 2011-11-29 | Preventive Medical Health Care Co., Ltd. | Rehabilitation and sports equipment with balance and turning function |
| PL391612A1 (en) | 2010-06-24 | 2012-01-02 | Radosław Raźniewski | Device for scoliosis treatment |
| US20120040812A1 (en) * | 2010-08-16 | 2012-02-16 | Shu-Chiung Liao Lai | Twist exerciser |
| WO2012098506A1 (en) * | 2011-01-18 | 2012-07-26 | Kinetic Medicus Ltd. | Apparatus and method for therapeutic spinal treatment |
| WO2012115738A1 (en) * | 2011-01-21 | 2012-08-30 | Genetic Potential, Inc. | Swing training apparatus and method |
-
2013
- 2013-05-13 EP EP13461531.9A patent/EP2803388A1/en not_active Withdrawn
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4385761A (en) * | 1981-02-19 | 1983-05-31 | Max Rice | Weighted rotatable therapeutic exercise device |
| ES2025407A6 (en) | 1990-06-15 | 1992-03-16 | Sastre Fernandez Santos | Process and machine for physiotherapy in scoliosis and deviations of the spine in general |
| PL173405B1 (en) | 1992-10-27 | 1998-03-31 | Mdp Invention | Vertebral column and other body parts treating, rehabilitating and training apparatus |
| JP2001212163A (en) | 2000-02-02 | 2001-08-07 | Atsutaka Nakajima | Special traction treatment device |
| CN101947175A (en) | 2009-07-10 | 2011-01-19 | 高福懋 | Multifunctional back motion device |
| PL391612A1 (en) | 2010-06-24 | 2012-01-02 | Radosław Raźniewski | Device for scoliosis treatment |
| US20120040812A1 (en) * | 2010-08-16 | 2012-02-16 | Shu-Chiung Liao Lai | Twist exerciser |
| WO2012098506A1 (en) * | 2011-01-18 | 2012-07-26 | Kinetic Medicus Ltd. | Apparatus and method for therapeutic spinal treatment |
| WO2012115738A1 (en) * | 2011-01-21 | 2012-08-30 | Genetic Potential, Inc. | Swing training apparatus and method |
| DE202011102658U1 (en) * | 2011-07-01 | 2011-11-29 | Preventive Medical Health Care Co., Ltd. | Rehabilitation and sports equipment with balance and turning function |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105999635A (en) * | 2016-06-29 | 2016-10-12 | 辽宁工程技术大学 | Comprehensive physical education and training equipment |
| CN105999635B (en) * | 2016-06-29 | 2018-07-27 | 辽宁工程技术大学 | A kind of comprehensive sports education exercise device |
| CN110314335A (en) * | 2019-08-05 | 2019-10-11 | 南京信息工程大学 | A kind of Yoga formula vertebra extends, torsion device |
| CN110314335B (en) * | 2019-08-05 | 2024-04-19 | 南京信息工程大学 | Yoga type vertebra extension and torsion device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203710325U (en) | Massage chair | |
| US8882802B2 (en) | Chiropractic machine | |
| US10912702B2 (en) | Method of passive mechanotherapy and exercise machine for implementation thereof | |
| US9687406B1 (en) | Stretching device | |
| KR101287134B1 (en) | Chiropractic and paraspinal muscle strengthening exercise apparatus | |
| TW201832739A (en) | Spine horizontal melody exercise device characterized in that the melodic exercise device is applied to the physiotherapy of human cervical vertebra and vertebral column to gradually alleviate the soreness, pain and numbness of vertebral body | |
| CN104367439A (en) | Massage chair | |
| US7976446B2 (en) | Exercise apparatus | |
| US20130053225A1 (en) | Multi-functional, structurally corrective neck exerciser | |
| CN113730175A (en) | Flexible cross traction rehabilitation bed | |
| CN107072876A (en) | Lumbar vertebrae corrective exercise servicing unit | |
| RU183784U1 (en) | SUPPORT SIMULATOR | |
| EP0337297A1 (en) | Gymnastic-curative apparatus | |
| EP2803388A1 (en) | Kinematic system of the machine for treating, rehabilitating and sports training of the spine and thorax muscles of the human body | |
| RU2548507C1 (en) | Method of restoring muscular corset of cervical spine and device for its realisation | |
| CN113648194A (en) | Vertical lumbar disc herniation treatment device | |
| WO2015019351A2 (en) | Novik mehanurgichesky table or portable traction apparatus for manual therapy and massage | |
| WO2012161377A1 (en) | Bed type chiropractic equipment | |
| EP2902078B1 (en) | Equipment for treating and caring for the spinal column | |
| CN212630995U (en) | Vertical rehabilitation treatment device | |
| CN112057222A (en) | Vertical rehabilitation treatment device | |
| RU86868U1 (en) | TABLE FOR MASSAGE AND MANUAL THERAPY | |
| CN213666672U (en) | Vertical waist massage device | |
| RU2813418C1 (en) | Method of treating and preventing spinal osteochondrosis and herniated discs | |
| CN213076422U (en) | Flexible cross traction rehabilitation bed |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20130513 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20150520 |