EP2740895A2 - Tübbing-Abstandssensor für Tunnelbohrmaschine - Google Patents
Tübbing-Abstandssensor für Tunnelbohrmaschine Download PDFInfo
- Publication number
- EP2740895A2 EP2740895A2 EP13196094.0A EP13196094A EP2740895A2 EP 2740895 A2 EP2740895 A2 EP 2740895A2 EP 13196094 A EP13196094 A EP 13196094A EP 2740895 A2 EP2740895 A2 EP 2740895A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- shield
- sensor
- boring machine
- tunnel boring
- shield tube
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 239000000463 material Substances 0.000 claims abstract description 10
- 238000002604 ultrasonography Methods 0.000 claims description 40
- 230000005670 electromagnetic radiation Effects 0.000 claims description 26
- 239000011435 rock Substances 0.000 claims description 19
- 210000005239 tubule Anatomy 0.000 claims description 11
- 238000011156 evaluation Methods 0.000 claims description 10
- 238000000034 method Methods 0.000 claims description 9
- 238000005553 drilling Methods 0.000 claims description 5
- 230000005855 radiation Effects 0.000 claims description 5
- 244000208734 Pisonia aculeata Species 0.000 claims 1
- 238000005259 measurement Methods 0.000 description 11
- 229910000831 Steel Inorganic materials 0.000 description 6
- 230000006378 damage Effects 0.000 description 6
- 239000010959 steel Substances 0.000 description 6
- 239000000945 filler Substances 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 3
- 239000004568 cement Substances 0.000 description 3
- 238000010276 construction Methods 0.000 description 3
- 238000011109 contamination Methods 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000001427 coherent effect Effects 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000001953 sensory effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000000875 corresponding effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 239000011798 excavation material Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000001681 protective effect Effects 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 239000002689 soil Substances 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21D—SHAFTS; TUNNELS; GALLERIES; LARGE UNDERGROUND CHAMBERS
- E21D9/00—Tunnels or galleries, with or without linings; Methods or apparatus for making thereof; Layout of tunnels or galleries
- E21D9/003—Arrangement of measuring or indicating devices for use during driving of tunnels, e.g. for guiding machines
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21D—SHAFTS; TUNNELS; GALLERIES; LARGE UNDERGROUND CHAMBERS
- E21D11/00—Lining tunnels, galleries or other underground cavities, e.g. large underground chambers; Linings therefor; Making such linings in situ, e.g. by assembling
- E21D11/40—Devices or apparatus specially adapted for handling or placing units of linings or supporting units for tunnels or galleries
- E21D11/403—Devices or apparatus specially adapted for handling or placing units of linings or supporting units for tunnels or galleries combined with the head machine
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21D—SHAFTS; TUNNELS; GALLERIES; LARGE UNDERGROUND CHAMBERS
- E21D9/00—Tunnels or galleries, with or without linings; Methods or apparatus for making thereof; Layout of tunnels or galleries
- E21D9/06—Making by using a driving shield, i.e. advanced by pushing means bearing against the already placed lining
- E21D9/0607—Making by using a driving shield, i.e. advanced by pushing means bearing against the already placed lining the shield being provided with devices for lining the tunnel, e.g. shuttering
Definitions
- the invention relates to a shield for a tunnel boring machine for drilling a borehole in a mountain range, a method for controlling the lining of a borehole wall of a borehole to be drilled by means of a tunnel boring machine with tubbing and a tunnel boring machine.
- a tunnel boring machine is a machine used to build tunnels.
- Components of a tunnel boring machine include a demolition screen with feeding and bracing devices, facilities for the installation of support and extension measures, equipment for material removal, a supply unit (electricity, compressed air, ventilation, water), and transport equipment for excavation material, proppant and finishing materials.
- a gripper presses or tightens against the rock that forms the borehole wall of an already partially drilled wellbore section and thereby supports the tunnel boring machine against the mountain.
- the tension of the gripper is released against the mountains, and the catch is tracked with respect to the advanced drill head.
- the borehole is circumferentially lined according to Bohrfort suits by segments, the axial and radial together create an annular stabilization of the borehole.
- the next Tübbingen set can either be placed on the borehole wall during a stroke or after completion of a stroke.
- a mostly metallic tube for example made of steel
- the rear end of the shield is called a tail shield.
- the shield serves to protect components of the tunnel boring machine from possibly collapsing rock and is interposed between the mountains and a soon to be laid tubbing. It is important that the distance between the tubing and the shield tube, which distance is also called tail tail air, must not be too low, in particular may not be zero. If this happens, the tubbing can be damaged by the shield tube. In an extreme case, the tunnel boring machine can even get stuck completely. This can or even prevent the work during a lifetime of the tunnel boring machine in the order of days or weeks.
- this distance is measured manually.
- a polisher for example, walks around the circumference of the shield tube with a folding rule at four positions and measures the distance.
- this method is prone to error, consuming and dangerous for the polisher.
- the company VMT offers the so-called "Automatic Tail Skin Clearance Measurement System SluM", with which such distances can be sensed.
- Several lasers are arranged in the draw, which measure the distance between the tubing and the wall at several points by means of a laser distance measurement.
- the construction of the laser distance measuring devices in the area of the catchment and the Laying of the segments is hindered because in this area the erector works, which moves the segments. Also in this area the risk of destruction for the sensitive laser is considerable.
- Another disadvantage of this system is that first the distance between the shield tube and the borehole wall is measured and only then the segments are measured. Sometimes a time of a few minutes passes between these two partial measurements, so that a comparison of the two measurement results is only possible to a limited extent and sometimes the accuracy of the measurement is insufficient.
- a shield for a tunnel boring machine for boring a borehole in a mountain having a shield tube for protecting a portion (particularly components) of the tunnel boring machine from rock wall dissolving rock material, the shield pipe temporarily between a tubing to be laid (ie, a tubing not yet attached to the wellbore wall but to be secured there soon) for lining the borehole wall on the one hand and the borehole wall (ie, the boundary wall between the mountain and the already drilled part of the borehole) on the other is to be arranged.
- the shield further comprises at least one arranged on and / or in the shield tube (in particular attached to the shield tube) sensor for detecting an indicative of a distance between the shield tube and the tubing to be laid information (for example, a sensor signal, from alone or in combination with other, measured and / or known data, the distance can be determined by calculation) on.
- a sensor signal for example, a sensor signal, from alone or in combination with other, measured and / or known data, the distance can be determined by calculation
- a tunnel boring machine for drilling a borehole in a rock, the tunnel boring machine having a shield with the features mentioned above.
- a method of controlling the lining of a borehole wall with a tubing to be drilled by a tunnel boring machine including placing a shield tube of a shield of the tunnel boring machine between a tubbing to be laid and a borehole wall in order to protect a section (in particular components) of the tunnel boring machine from rock material loosening from the borehole wall, and an information indicative of a distance between the shield tube and the tubing to be laid is detected by means of at least one sensor arranged on and / or in the shield tube, and the laying of the tubbing to be laid is controlled at the borehole wall based on the detected information.
- the minimum distance between a predetermined position or a predetermined surface area of the shield tube on the one hand and the tubbing to be laid on the other hand can be understood.
- this term can also be understood as meaning any other, predefined distance parameter in the ratio of shield tube tubbing.
- this may be the smallest distance of the tubbing from a surface of the shield tube.
- this may be the distance between the tubbing and a predetermined portion of the shield tube, for example its inner collar or its inner surface. It is also possible according to the invention to detect a plurality of distances between segments and different surface areas of the shield tube, for Example in several peripheral surface sections of the shield tube in order to obtain a further refined information base with regard to the circumferential distance distribution.
- a sensor for sensory acquisition of data which allow the determination of the distance between the shield tube and a tubbing to be laid, is preferably mounted or provided on the inner surface of the shield tube.
- This position of the sensor on the shield tube is insensitive to falling rock or the like, since the shield tube between tubing and borehole wall is located and the measurement between tubing and shield tube protected on the inner surface of the shield tube plays.
- the positioning of the sensor at this point does not interfere with the construction of the tunnel boring machine and thus allows a high-precision and fault-robust measurement.
- the integration of the sensor on or in the shield thus improves the operational reliability of the tunnel boring machine and allows a completely safe and high-precision detection of the distance between the next to be laid tubbing and the inner surface of the shield tube.
- the senor can be arranged on an inner lateral surface of the shield tube facing away from the borehole wall (for example, be fixedly mounted on it) and / or arranged in an inner lateral surface of the shield tube facing away from the borehole wall (for example integrated therein, for example on the Finish flush with the shield tube).
- the sensor is safely protected from the surrounding mountains, from tubbing and from components of the tunnel boring machine and is also capable of barrier-free detection of a tubbing arranged inside the shield tube.
- the shield tube may be an at least partially circumferential, in particular full-circumference, support ring one - with respect to a feed direction of the tunnel boring machine - have the rear end of the shield tube.
- the shield tube is provided with a support ring, which may also be formed of steel. This support ring forms, together with the rest of the shield tube, a protected or shielded space which remains free of other components, in particular of the tubbing to be handled.
- the position in a boundary region between the support ring and jacket of the shield tube provides an ideal pick-up position for the sensor.
- the support ring and a lateral surface of the shield tube may be integrally formed, in particular one-material.
- the support ring and the shield tube can be formed as parts welded together, for example made of steel.
- the support ring starting from a hollow cylindrical and open at the end of the lateral surface of the shield tube collar-shaped inwardly projecting.
- a right angle between the collar-shaped inwardly inverted supporting ring and the hollow cylindrical, in particular hollow cylindrical, shield tube formed. At this angle, advantageously, the sensor can be positioned without being exposed to the danger of destruction or damage.
- the senor may be arranged on and / or in an inner circumferential surface of the shield body facing away from the borehole wall adjacent to the support ring.
- the sensor may be mounted on the inner circumferential surface of the hollow cylindrical shield body in a range of less than 50 cm, in particular a range of less than 30 cm, away from the support ring, where the shielding protective effect of the support ring is particularly pronounced.
- the senor may be less protruding beyond the inner circumferential surface than the sensor Support ring. Then the projection of the support ring provides a particularly good mechanical protection of the mounted in the shadow space sensor.
- the senor may be arranged on a rear end of a shield tail of the shield tube in the feed direction of the tunnel boring machine. Close to this position there is a tubbing to be laid next, so that the placement of the sensor at the end of the shield tail allows for particularly accurate determination of the size of the shield tail air.
- the senor may be an ultrasonic sensor.
- An ultrasonic sensor is particularly well suited because it is flat in its design, inexpensive available and reliable in harsh or dirty atmosphere is used, as it prevails in a well.
- Such an ultrasonic sensor is based on emitting ultrasound waves from a known position and detecting them after interaction with the segment to be laid in the vicinity of the ultrasound sensor.
- An ultrasonic sensor according to the invention is particularly preferred because it is completely insensitive to contamination and the like.
- the senor may include an ultrasound source for generating and directing ultrasound to the tubule and having an ultrasound detector for detecting ultrasound reflected on the tubule.
- the ultrasound source and the ultrasound detector can be integrated in a compact unit and, together with an evaluation unit, can determine the distance of the tubbings from the inner surface of the shield tube by comparing the emitted ultrasound and the reflected ultrasound.
- the shield may have an ultrasonic deflection element between the ultrasound source and the ultrasound detector, on the one hand, and the tubbing, on the other hand, to deflect ultrasound from the ultrasound source to the tubule and from the tubule to the ultrasound detector.
- an ultrasonic deflection element can For example, a prism or a reflector mirror may be such that its surface directs ultrasonic waves coming from the ultrasonic generator onto the tubbing, and ultrasonic waves coming from the tubing faces the ultrasonic detector.
- the senor may be an electromagnetic radiation sensor.
- an ultrasonic sensor it is therefore also possible to use a radiation sensor which is based on the emission and detection of electromagnetic radiation, such as, for example, visible light, ultrasound, infrared or electromagnetic radiation of another suitable wavelength range.
- electromagnetic radiation sensors for example laser distance measuring devices, it must be ensured in the use according to the invention that contamination of corresponding components is avoided or that these components are cleaned again when contamination has occurred. The latter can be done manually or by means of an automatic cleaning system, for example a windscreen wiper system.
- the senor may comprise an electromagnetic radiation source for generating and directing electromagnetic radiation to the tubbing and having an electromagnetic radiation detector for detecting electromagnetic radiation reflected at the tubbing.
- the electromagnetic radiation source may be a laser source that emits coherent light in the direction of the tubbing. The laser light reflected from the tubbing can then be evaluated to determine the distance of the tubbings from the shield tube.
- the shield may further comprise an electromagnetic radiation deflecting element between the Have electromagnetic radiation source and the electromagnetic radiation detector on the one hand and the tubbing on the other hand to deflect electromagnetic radiation from the electromagnetic radiation source on the tubbing and of the tubbing on the electromagnetic radiation detector.
- Straight laser distance sensors often have a relatively large dimension, which can be mounted particularly easily in the cramped conditions in the boundary region of a shield tube and a collar-shaped support ring, when a radiation and reception direction of the laser light is made possible parallel to the feed direction.
- a deflection prism, a reflector mirror or the like such a relatively large laser distance measuring device can be used according to the invention.
- the shield may comprise a plurality of sensors (for example between three and ten, in particular seven) with the features described above, wherein the sensors are distributed along a circumference of the shield tube.
- the sensors can be arranged circumferentially around a feed axis. In this way it is possible to monitor the tailrace air around the entire shield tube.
- sensors arranged substantially on opposite sides of the shield tube can provide correlated distance information, since reducing the one distance requires the other, opposite distance to be increased. In this way, with a partly redundant measurement, the error robustness of the system can be further improved.
- a floor area of the shield tube which floor area is in contact with the mountain when used as intended, may be kept free of sensors.
- the area of the shield tube which is kept free of sensors may correspond to an angle range of ⁇ 60 °, in particular ⁇ 30 °, around the bottom-nearest point of the shield tube. This prevents sensors from passing through Contact with soil, liquid and other mountain material may be damaged or destroyed.
- the shield may include a filler transport line for providing a space between the tubbings and the borehole wall with filler, and a cable connection, in particular a steel sheathed cable connection, for forming an electrical connection between the sensor and a partner device, in particular a sensor signal evaluation unit for evaluating a signal of the sensor and / or an electrical energy supply unit for supplying the sensor with electrical energy, the feed-transport line and the cable connection next to each other preferably both being guided along an inner circumferential surface of the shield tube.
- Cement can be pumped into the annulus between the tubbing and the mountain via a feed transport line, for example a cement line, to fix the tubbing.
- an outer diameter of the shield tube may be in a range between about 2 m and about 15 m, in particular in a range between about 4 m and about 13 m.
- the shield according to the invention for tunnel boring machines of various sizes can be used.
- the tunnel boring machine may have an evaluation unit which is used to evaluate the Sensor signal detected by the sensor is set up to determine the distance between the shield tube and the tubbing to be laid.
- an evaluation unit may be a processor which determines the actual distance information from the raw measurement data.
- the evaluation unit may be configured to trigger a predetermined event if the determined distance falls below a predetermined threshold value.
- This threshold may be, for example, about 5 cm, in particular about 2 cm. In this way it can be avoided that the tail air is dangerously small. If it becomes zero, this may damage the segments, as the shield tube then scrapes along them. Also, this can lead to a sticking of the entire tunnel boring machine, which can result in significant downtime.
- the predetermined event may be turning off the tunnel boring machine, issuing a warning, and / or adjusting an operating parameter of the tunnel boring machine to increase the distance again.
- Other or more events can also be triggered if the tail tail air falls below a certain size or becomes zero.
- the tunnel boring machine may include a tubbing laying unit configured to control the lining of the borehole wall with tubbing based on the distance indicative information.
- the laying of the segments which may be formed as curved, substantially trapezoidal body is carried out according to predetermined rules or algorithms, in which a direction of the borehole to be drilled (left turn, right turn, slope, gradient or straight course), but also the current absolute position belongs to the segments to be laid or the relative position between Tübbingen and shield tube.
- Trapezoidal universal segments can be used to line all types of borehole directions.
- the laying process of the segments using an erector can be controlled in accordance with the invention to enter into this calculation the high-precision recorded sensor data, which can conclude the distance between the shield tube and tubbing to be laid.
- the tunnel boring machine may comprise a rotatable drill head at a front end of the tunnel boring machine, on which a plurality of cutting elements for removing the rock are arranged.
- the tunnel boring machine may further comprise a feed device, which has for exerting a feed force for advancing the drill head against the mountains.
- the tunnel boring machine may include a gripper configured to temporarily support the tunnel boring machine by means of bracing against the mountain (in a direction perpendicular to the direction of advance).
- the tunnel boring machine may include an erector configured to lay the tubbings along the borehole wall.
- the tunnel boring machine can have a rear-side pull arranged with respect to the feed direction, which has supply devices for supplying the tunnel boring machine.
- a front shield position can first be determined using a camera measuring system.
- a camera measuring system By means of a theodolite system the positioning of a gripper shield can be determined. This allows a georeferenced calibration of front shield and Gripper shield. Orientation information can also be determined by means of a two-axis inclination sensor measurement in the horizontal and vertical measuring direction.
- the position of front shield and Gripperschild are always known.
- the geometry of the excavated cavity or borehole is known. The lining of the borehole wall with tubbing should now follow the shield axis, otherwise the shield tail air approaches zero and the segments may be damaged.
- the information is still required, such as the tubbing oriented relative to the shield tail to perform a correct control.
- the distance measurement according to the invention between the segments to be laid and the shield tube it is possible to control how the segments are to be laid.
- the lining of the borehole wall is controlled by tubbing, wherein the sensor signal serves as an input parameter for the calculation of the tubbing lining.
- Fig. 1 10 shows a cross-section through a wellbore 104 drilled in a rock 102 by means of a tunnel boring machine 100 according to an exemplary embodiment of the invention.
- Fig. 1 shows the tunnel boring machine 100 at the beginning of a working stroke, during which a drill head 106 of the tunnel boring machine 100 forward, that is according to Fig. 1 to the left, working into the mountains 102 while removing rocks of the mountains 102, forming a successively increasing borehole 104.
- a gripper 110 is shown, which in accordance with Fig. 1 wedging vertical direction against the mountains 102 or to temporarily anchor a portion of the tunnel boring machine 100 at this position.
- a feed cylinder 108 which is driven by electric motors 120, presses the drill head 106 according to Fig. 1 to the left in the advancing direction, so that cutting elements on a front wall of the drill head 106 in a manner known to those skilled ablate the material of the mountain 102 while drilling the borehole 102 progressively.
- a stroke of the tunnel boring machine 100 for example of the order of 1 m to 2 m, corresponds to a dimension across which pistons of the feed cylinder 108 can be extended to drive the drill head 106 forward.
- the drill head has 106 of the catchment of the tunnel boring machine 100, that is the according to Fig. 1 Right-hand part of the tunnel boring machine 100, removed and the feed cylinder 108 has reached its maximum expansion position.
- the feed cylinder 108 In this operating state, the feed cylinder 108 must be returned to its original position and the retraction of the tunnel boring machine 100 must be tracked before a next stroke of the tunnel boring machine 100 can be performed.
- the tension of the gripper 110 against the surrounding rock 102 must first be solved. Then, when the feed cylinder 108 has reached its maximum expansion position (as in FIG Fig. 2 shown), the feed cylinder 108 and all according to Fig. 1 and Fig. 2 of which components provided on the right are tracked to the left.
- the segments 112 may be considered to be substantially trapezoidal but slightly curved bodies which are circumferentially placed around the substantially circular bore 104 on the borehole wall and fastened there with filler.
- Tübbing 112 is the tubbing that is currently being prepared for lining the borehole wall or is used. The actual lining and handling of the segments 112 takes place by means of an erector 120.
- a shield tube 118 of a shield protects the gripper 110, the erector 120 and other components of the tunnel boring machine 100 from undesirable environmental influences. Such undesirable influences include the falling loose rock of rock 102 at the edge of the borehole wall.
- the hollow cylinder made of steel, which forms the shield tube 118 covers all sides protecting the components of the tunnel boring machine 100, which surrounds it.
- Tubules 112 to be subsequently placed are positioned within the shield tube 118 prior to handling by the erector 120. In other words, the shield tube 118 is located in this operating state between the borehole wall on the one hand and the tubbing segments 112 to be laid subsequently.
- Fig. 1 Shown also schematically is a support ring 122 of the shield tube 118, which is located at a rear end of the shield tube 118 relative to the direction of advance.
- the support ring 122 is, although in Fig. 1 and Fig. 2 can not be seen, as an inwardly extending, annular disc-shaped collar formed which is angled at right angles to the otherwise hollow cylindrical tube wall of the shield tube 118 and forms the end of the shield also referred to as tail shield.
- At least one sensor 116 mounted on an inner circumferential surface of the shield tube 118 to measure from there the respective distance between the shield tube 118 and the tubbing 112 to be laid.
- Different configurations of the sensor 116 and different forms of mounting will be discussed below Fig. 4 to Fig. 7 explained in more detail with reference to exemplary embodiments.
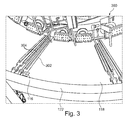
- Fig. 3 but first shows a view 300 of the interior of the present invention equipped with a sensor 116 shield tube 118 on the tail shield. Also, the end-side collar which forms the support ring 122 is in Fig. 3 to recognize. Other components of the tunnel boring machine 100 inside the shield tube 118 are in Fig. 3 also shown are not described in detail for the sake of brevity.
- Fig. 3 It is also in Fig. 3 have shown that two backfill transport lines 304 extend along an inner circumferential surface in the axial direction. These backfill transport conduits 304 serve to supply backfill between the borehole wall and tubbing to immobilize the tubbings on the borehole wall.
- the sensor 116 for detecting the distance between the shield tube 118 and the tubbing 112 to be laid (not shown in FIG Fig. 3 ) is attached to a boundary between the support ring 122 and the inner surface of the hollow cylindrical portion of the shield tube 118.
- the sensor 116 for example an ultrasonic sensor, requires power for operation, which is supplied via a power line 302.
- the power line 302 is arranged to run parallel to the feedstock supply lines 304 and is in close proximity so that any obstruction to building activity associated with the provision of the lines 302, 304 is minimized.
- the line 302 may be for transmitting electrical sensor signals from the sensor 116 to an in Fig. 3 Not shown Tübbingverlege Kunststoffmaschinemaschine serve.
- This uses, inter alia, the sensor information of the sensor 116, to control the laying of the segments.
- exact knowledge of the position of the segments is required as well as further geometry information (for example the position of Gripperschild and front shield, which can be determined using camera measuring systems or theodolites).
- the person skilled in the art is aware of how such a control of the laying of the segments is to be made.
- the sensor information can be supplied with high precision and with a very robust defect. In the dirty atmosphere of a borehole, a sensor 116 located inside the shield tube 118 can be operated well protected. Also, due to the collar-shaped everting of the support ring 122, a mechanical protection of the sensor 116 is given.
- Fig. 4 now shows a cross-sectional view of a shield 400 of a tunnel boring machine 100, which is formed by the shield tube 118 with its end-side annular disc as a support ring 122.
- An arrow in Fig. 4 indicates the direction of advance of the tunnel boring machine 100, that is, the direction along which a boring head 106 (not shown in FIG Fig. 4 ) prepares successively in the mountains 102.
- the support ring 122 runs fully around the hollow circular cylindrical portion of the shield tube 118th
- Fig. 4 schematically shows a plurality of segments 112, 114.
- Tubuli 112 are currently being laid and are in the operating state shown at a respective distance from the inner surface of the shield tube 118.
- Tubbing 112 shown above the distance is denoted by d.
- an ultrasonic sensor 116 is placed on the inner circumferential surface of the shield tube 118 and fixed there immovably.
- the ultrasonic sensor 116 includes an ultrasonic source for emitting primary ultrasound 402 on the tubbing 112 to be laid. Secondary ultrasound 404, which is reflected on the tubule 112, is detected by an ultrasound detector of the ultrasound sensor 116. From the recorded Sensor signal, the ultrasonic sensor 116 determine the distance to the tubbing to be laid 112 (in particular the distance relative to a predetermined reference position, for example, the position of the ultrasonic sensor 116 or the inner surface of the shield tube 118).
- the support ring 122 serves to shield the sensor 116 against undesired influences of the environment and as mechanical protection of the sensor 116 against damage.
- Fig. 4 further shows a supply and signal transport cable 302 extending axially from an ultrasonic sensor 116 along an inner surface of the shield tube 118.
- the cable 302 may be steel clad to accommodate the harsh conditions in the working area of a tunnel boring machine 100.
- the supply and signal transmission cable 302 supplies the ultrasonic sensor on the one hand with electrical energy.
- the ultrasonic sensor transmits the detected sensor information via the supply and signal transport cable 302 to an evaluation device (not shown).
- Fig. 5 shows schematically and in cross-section only a lower portion of a shield tube 118 of a shield 400 according to another exemplary embodiment of the invention.
- a laser distance meter 116 is provided as a sensor.
- the laser distance meter 116 emits coherent monochromatic laser light 502 in FIG Fig. 5 horizontal direction.
- This primary laser light 502 is deflected by an optical prism 500 by 90 ° onto the tubbing 112, reflected therefrom, and in turn passes via the optical prism 500 in the form of secondary radiation 504 to a photosensitive element of the laser distance meter 116.
- the configuration with the prism 500 allows It is to use in a particularly cramped environment laser measuring devices 116, as they can be clearly mounted with its flat, large-scale side on the inside of the shield tube 118 and can emit in the horizontal direction, the primary laser light 502.
- Fig. 6 corresponds to the embodiment of Fig. 4 , wherein the ultrasonic sensor 116 is now integrated into the interior of the shield tube 118, so that its surface is flush with an inner circumferential surface of the shield tube 118 or aligned. As a result, the ultrasonic sensor 116 is particularly well protected against mechanical influences of the environment.
- FIG. 12 shows a shield 400 according to yet another exemplary embodiment of the invention, in which the sensor 116 is integrated into the support ring 122, whereas an ultrasound reflection prism 700 is attached to an inner surface of the shield tube 118.
- the primary ultrasound radiation 402 is emitted by the sensor 116, reflected on the ultrasound reflection prism 700 upwards in the direction of the tubing 112 to be laid and, after reflection on the latter and after repeated reflection on the ultrasound reflection prism 700, arrives at an ultrasound detector of the ultrasound sensor 116.
- the ultrasonic sensor 116 need not necessarily be integrated into the support ring 122, but may also be placed on this projecting. In both cases, the support ring 122 serves as protection against mechanical damage.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Geology (AREA)
- Environmental & Geological Engineering (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Excavating Of Shafts Or Tunnels (AREA)
Abstract
Description
- Die Erfindung betrifft ein Schild für eine Tunnelbohrmaschine zum Bohren eines Bohrlochs in einem Gebirge, ein Verfahren zum Steuern des Auskleidens einer Bohrlochwandung eines mittels einer Tunnelbohrmaschine zu bohrenden Bohrlochs mit Tübbingen sowie eine Tunnelbohrmaschine.
- Eine Tunnelbohrmaschine ist eine Maschine, die zum Bau von Tunneln eingesetzt wird. Bauteile einer Tunnelbohrmaschine sind ein Abbauschild mit Vorschub- und Verspanneinrichtungen, Einrichtungen für den Einbau von Stützund Ausbaumaßnahmen, Einrichtungen zum Materialabtransport, eine Versorgungseinheit (Strom, Druckluft, Bewetterung, Wasser), und Transporteinrichtungen für Ausbruchsmaterial, Stützmittel und Ausbaumaterialien.
- Bei einer Tunnelbohrmaschine ist es als Basis für eine präzise Steuerung der Bauteile oder Komponenten wichtig, die räumliche Lage von einzelnen Bauteilen oder Komponenten relativ zueinander bestimmen zu können. Dies ist in vielen Fällen in schmutziger Umgebung, unter dem Einfluss starker mechanischer Belastungen und somit unter rauen Bedingungen erforderlich.
- Im Betrieb einer solchen Tunnelbohrmaschine wird ein Bohrkopf mit Schneidelementen mittels eines Vorschubzylinders um eine Hubweite von zum Beispiel 1 m nach vorne geschoben und dringt dabei in das abzubauende Gebirge ein. Ein Gripper drückt bzw. verspannt sich gegen das Gestein, das die Bohrlochwandung eines bereits teilweise gebohrten Bohrlochabschnitts bildet und stützt dadurch die Tunnelbohrmaschine gegen das Gebirge ab. Nach einem solchen Hub wird die Verspannung des Grippers gegen das Gebirge gelöst, und der Nachzug wird gegenüber dem vorgeschobenen Bohrkopf nachgeführt. Um das sukzessive größer werdende Bohrloch ringförmig zu stabilisieren, wird das Bohrloch entsprechend Bohrfortschritt umfänglich durch Tübbinge ausgekleidet, die axial und radial gemeinsam eine ringförmige Stabilisierung des Bohrlochs schaffen. Der nächste Satz von Tübbingen kann je nach Typ der Tunnelbohrmaschine entweder während einem Hub oder nach Abschluss eines Hubs auf die Bohrlochwandung aufgesetzt werden.
- Zwischen Komponenten der Tunnelbohrmaschine und der noch nicht mit Tübbingen ausgekleideten Gebirgewand bzw. Bohrlochwandung ist ein zumeist metallisches Rohr (zum Beispiel aus Stahl) vorgesehen, das als Schild bezeichnet wird. Das hintere Ende des Schilds wird als Schildschwanz bezeichnet. Das Schild dient dazu, Komponenten der Tunnelbohrmaschine vor möglicherweise einstürzendem Gestein zu schützen und wird zwischen das Gebirge und einen demnächst zu verlegenden Tübbing zwischengeordnet. Dabei ist es wichtig, dass der Abstand zwischen Tübbing und dem Schildrohr, welcher Abstand auch Schildschwanzluft genannt, nicht zu gering werden darf, insbesondere nicht Null werden darf. Sollte dies passieren, kann der Tübbing durch das Schildrohr geschädigt werden. In einem extremen Fall kann die Tunnelbohrmaschine sogar vollständig stecken bleiben. Dies kann die Arbeiten während einer Standzeit der Tunnelbohrmaschine in der Größenordnung von Tagen oder Wochen be- oder sogar verhindern.
- Aus den genannten Gründen ist es wichtig, den Abstand zwischen Schildrohr und Tübbingen genau zu kennen, um die Tunnelbohrmaschine entsprechend steuern zu können.
- Um dies zu erreichen, ist zunächst bekannt, dass dieser Abstand manuell gemessen wird. Ein Polier geht dabei zum Beispiel mit einem Zollstock an vier Positionen am Umfang des Schildrohrs herum und misst den Abstand. Allerdings ist diese Methode fehleranfällig, aufwendig und für den Polier gefährlich.
- Das Unternehmen VMT bietet das sogenannte "Automatic Tail Skin Clearance Measurement System SluM" an, mit dem derartige Abstände sensorisch gemessen werden können. Dabei werden mehrere Laser im Nachzug angeordnet, die mittels einer Laserdistanzmessung an mehreren Stellen den Abstand zwischen Tübbing und Wand messen. Allerdings wird durch die Montage der Laserabstandsmessgeräte im Bereich des Nachzugs die Bautätigkeit und das Verlegen der Tübbinge behindert, da in diesem Bereich der Erektor arbeitet, der die Tübbinge verlegt. Auch ist in diesem Bereich die Zerstörungsgefahr für die empfindlichen Laser erheblich. Ein weiterer Nachteil dieses Systems ist, dass zunächst die Distanz zwischen Schildrohr und Bohrlochwandung gemessen wird und erst danach die Tübbinge vermessen werden. Zwischen diesen beiden Teilmessungen vergeht mitunter eine Zeit von einigen Minuten, so dass ein Vergleich der beiden Messergebnisse nur bedingt möglich ist und auch die Genauigkeit der Messung manchmal nicht ausreichend ist.
- Es ist eine Aufgabe der vorliegenden Erfindung, eine Sensorik zum Ermitteln eines Abstands zwischen Tübbingen und einem Schild einer Tunnelbohrmaschine bereitzustellen, die auch unter rauen Bedingungen fehlerrobust einsetzbar ist.
- Diese Aufgabe wird durch die Gegenstände mit den Merkmalen gemäß den unabhängigen Ansprüchen gelöst. Weitere Ausführungsbeispiele sind in den abhängigen Ansprüchen gezeigt.
- Gemäß einem Ausführungsbeispiel der vorliegenden Erfindung ist ein Schild für eine Tunnelbohrmaschine zum Bohren eines Bohrlochs in einem Gebirge geschaffen, wobei das Schild ein Schildrohr zum Schützen eines Abschnitts (insbesondere von Komponenten) der Tunnelbohrmaschine vor sich von einer Bohrlochwandung lösendem Gebirgematerial aufweist, wobei das Schildrohr vorübergehend zwischen einem zu verlegenden Tübbing (d.h. einem Tübbing, der noch nicht an der Bohrlochwandung befestigt ist, aber dort demnächst befestigt werden soll) zum Auskleiden der Bohrlochwandung einerseits und der Bohrlochwandung (d.h. der Grenzwand zwischen dem Gebirge und dem bereits gebohrten Teil des Bohrlochs) andererseits anzuordnen ist. Das Schild weist ferner mindestens einen an und/oder in dem Schildrohr angeordneten (insbesondere an dem Schildrohr befestigtem) Sensor zum Detektieren einer für einen Abstand zwischen dem Schildrohr und dem zu verlegenden Tübbing indikativen Information (zum Beispiel ein Sensorsignal, aus dem alleine oder in Kombination mit weiteren, gemessenen und/oder vorbekannten Daten der Abstand rechnerisch ermittelbar ist) auf.
- Gemäß einem weiteren Ausführungsbeispiel der vorliegenden Erfindung ist eine Tunnelbohrmaschine zum Bohren eines Bohrlochs in einem Gebirge bereitgestellt, wobei die Tunnelbohrmaschine ein Schild mit den oben genannten Merkmalen aufweist.
- Gemäß noch einem anderen Ausführungsbeispiel der vorliegenden Erfindung ist ein Verfahren zum Steuern des Auskleidens einer Bohrlochwandung eines mittels einer Tunnelbohrmaschine zu bohrenden Bohrlochs mit Tübbingen geschaffen, wobei bei dem Verfahren ein Schildrohr eines Schilds der Tunnelbohrmaschine zwischen einem zu verlegenden Tübbing einerseits und der Bohrlochwandung andererseits angeordnet wird, um einen Abschnitt (insbesondere Komponenten) der Tunnelbohrmaschine vor sich von der Bohrlochwandung lösendem Gebirgematerials zu schützen, und eine für einen Abstand zwischen dem Schildrohr und dem zu verlegenden Tübbing indikative Information mittels mindestens eines an und/oder in dem Schildrohr angeordneten Sensors detektiert wird, und das Verlegen des zu verlegenden Tübbings an der Bohrlochwandung basierend auf der detektierten Information gesteuert wird.
- Unter dem Abstand des zu verlegenden Tübbings von dem Schildrohr kann die minimale Distanz zwischen einer vorbestimmten Stelle oder einem vorbestimmten Flächenbereich des Schildrohrs einerseits und dem zur Verlegung anstehenden Tübbing andererseits verstanden werden. Unter diesem Begriff kann aber auch ein beliebiger anderer, vordefinierter Abstandsparameter im Verhältnis Schildrohr-Tübbing verstanden werden. Dies kann in einem Ausführungsbeispiel der geringste Abstand des Tübbings von einer Oberfläche des Schildrohrs sein. Gemäß einem anderen Ausführungsbeispiel kann dies der Abstand zwischen dem Tübbing und einem vorbestimmten Abschnitt des Schildrohrs sein, zum Beispiel dessen Innenkragen oder dessen Innenfläche. Es ist erfindungsgemäß auch möglich, mehrere Abstände zwischen Tübbingen und unterschiedlichen Oberflächenbereichen des Schildrohrs zu erfassen, zum Beispiel in mehreren umfänglichen Flächenabschnitten des Schildrohrs, um eine weiter verfeinerte Informationsgrundlage hinsichtlich der umfänglichen Abstandsverteilung zu erhalten.
- Gemäß einem exemplarischen Ausführungsbeispiel der Erfindung wird ein Sensor zum sensorischen Erfassen von Daten, welche das Ermitteln des Abstands zwischen Schildrohr und einem zu verlegenden Tübbing erlauben, vorzugsweise an der Innenfläche des Schildrohrs montiert oder vorgesehen. Diese Position des Sensors am Schildrohr ist unempfindlich gegen herabstürzendes Gestein oder dergleichen, da sich das Schildrohr zwischen Tübbing und Bohrlochwandung befindet und sich die Messung zwischen Tübbing und Schildrohr geschützt an der Innenfläche des Schildrohrs abspielt. Darüber hinaus stört die Positionierung des Sensors an dieser Stelle nicht die Bautätigkeit der Tunnelbohrmaschine und erlaubt somit eine hochpräzise und fehlerrobuste Messung. Die Integration des Sensors am oder im Schild verbessert somit die Betriebssicherheit der Tunnelbohrmaschine und ermöglicht ein vollkommen gefahrloses und hochpräzises Erfassen des Abstands zwischen dem nächsten zu verlegenden Tübbing und der inneren Oberfläche des Schildrohrs.
- Im Weiteren werden zusätzliche exemplarische Ausführungsbeispiele des Schilds, der Tunnelbohrmaschine und des offenbarten Verfahrens beschrieben.
- Gemäß einem exemplarischen Ausführungsbeispiel kann der Sensor an einer der Bohrlochwandung abgewandten inneren Mantelfläche des Schildrohrs angeordnet sein (zum Beispiel darauf fest montiert sein) und/oder in einer der Bohrlochwandung abgewandten inneren Mantelfläche des Schildrohrs angeordnet sein (zum Beispiel darin integriert sein, beispielsweise an der Oberfläche bündig mit dem Schildrohr abschließend). Auf diese Weise ist der Sensor vor dem umgebenden Gebirge, vor Tübbingen und vor Komponenten der Tunnelbohrmaschine sicher geschützt und ist außerdem in der Lage, barrierefrei einen innerhalb des Schildrohrs angeordneten Tübbing zu detektieren.
- Gemäß einem exemplarischen Ausführungsbeispiel kann das Schildrohr einen zumindest teilumfänglichen, insbesondere vollumfänglichen, Stützring an einem - bezogen auf eine Vorschubrichtung der Tunnelbohrmaschine - rückseitigen Ende des Schildrohrs aufweisen. An einer Rückseite des Schildschwanzes ist üblicherweise das Schildrohr mit einem Stützring versehen, der ebenfalls aus Stahl ausgebildet sein kann. Dieser Stützring bildet gemeinsam mit dem Rest des Schildrohrs einen geschützten oder abgeschirmten Raum, der von anderen Komponenten, insbesondere auch von dem zu handhabenden Tübbing, frei bleibt. Somit bietet die Position in einem Grenzbereich zwischen Stützring und Mantel des Schildrohrs eine ideale Aufnahmeposition für den Sensor.
- Gemäß einem exemplarischen Ausführungsbeispiel können der Stützring und eine Mantelfläche des Schildrohrs einstückig bzw. integral, insbesondere einstoffig, ausgebildet sein. Der Stützring und das Schildrohr können als miteinander verschweißte Teile, zum Beispiel aus Stahl, ausgebildet werden.
- Gemäß einem exemplarischen Ausführungsbeispiel kann der Stützring ausgehend von einer hohlzylindrisch ausgebildeten und endseitig offenen Mantelfläche des Schildrohrs kragenförmig nach innen ragend ausgebildet sein. Anschaulich ist im Querschnitt ein rechter Winkel zwischen dem kragenförmig nach innen gestülpten Stützring und dem hohlzylindrischen, insbesondere hohlkreiszylindrischen, Schildrohr gebildet. In diesem Winkel kann vorteilhaft der Sensor positioniert werden, ohne der Gefahr einer Zerstörung oder Beschädigung ausgesetzt zu sein.
- Gemäß einem exemplarischen Ausführungsbeispiel kann der Sensor an und/oder in einer der Bohrlochwandung abgewandten inneren Mantelfläche des Schildkörpers angrenzend an den Stützring angeordnet sein. Zum Beispiel kann der Sensor in einem Bereich von weniger als 50 cm, insbesondere einem Bereich von weniger als 30 cm, von dem Stützring entfernt an der inneren Mantelfläche des hohlzylindrischen Schildkörpers angebracht sein, wo die abschirmende Schutzwirkung des Stützrings besonders ausgeprägt ist.
- Gemäß einem exemplarischen Ausführungsbeispiel kann der Sensor über die innere Mantelfläche weniger weit hervorstehend ausgebildet sein als der Stützring. Dann bietet die Auskragung des Stützrings einen besonders guten mechanischen Schutz des in dessen Schattenraum angebrachten Sensors.
- Gemäß einem exemplarischen Ausführungsbeispiel kann der Sensor an einem in Vorschubrichtung der Tunnelbohrmaschine rückseitigen Ende eines Schildschwanzes des Schildrohrs angeordnet sein. Nahe dieser Position befindet sich ein als nächstes zu verlegender Tübbing, so dass das Anordnen des Sensors am Ende des Schildschwanzes besonders präzise die Bestimmung der Größe der Schildschwanzluft ermöglicht.
- Gemäß einem exemplarischen Ausführungsbeispiel kann der Sensor ein Ultraschallsensor sein. Ein Ultraschallsensor ist besonders gut geeignet, da er in seiner Bauform flach, kostengünstig verfügbar und auch in rauer bzw. schmutziger Atmosphäre zuverlässig einsetzbar ist, wie sie in einem Bohrloch herrscht. Ein solcher Ultraschallsensor basiert darauf, von einer bekannten Position aus Ultraschallwellen zu emittieren und diese nach Wechselwirkung mit dem in der Nachbarschaft des Ultraschallsensors angeordneten zu verlegenden Tübbing zu detektieren. Ein Ultraschallsensor ist erfindungsgemäß besonders bevorzugt, da er gegen Verschmutzung und dergleichen vollkommen unempfindlich ist.
- Gemäß einem exemplarischen Ausführungsbeispiel kann der Sensor eine Ultraschallquelle zum Erzeugen und Richten von Ultraschall auf den Tübbing aufweisen und einen Ultraschalldetektor zum Erfassen von an dem Tübbing reflektiertem Ultraschall aufweisen. Ultraschallquelle und Ultraschalldetektor können in einer kompakten Einheit integriert sein und können gemeinsam mit einer Auswerteeinheit durch einen Vergleich des ausgesandten Ultraschalls und des reflektierten Ultraschalls den Abstand des Tübbings von der Innenfläche des Schildrohrs bestimmen.
- Gemäß einem exemplarischen Ausführungsbeispiel kann das Schild ein Ultraschallablenkelement zwischen der Ultraschallquelle und dem Ultraschalldetektor einerseits und dem Tübbing andererseits aufweisen, um Ultraschall von der Ultraschallquelle auf den Tübbing und von dem Tübbing auf den Ultraschalldetektor abzulenken. Ein derartiges Ultraschallablenkelement kann zum Beispiel ein Prisma oder ein Reflektorspiegel sein, das oder der so beschaffen ist, dass seine Oberfläche Ultraschallwellen, die von dem Ultraschallgenerator kommen, auf den Tübbing richtet und Ultraschallwellen, die von dem Tübbing kommen, auf den Ultraschalldetektor richtet. Durch das Vorsehen eines solchen Ultraschallablenkelements ist der Einsatz eines Ultraschallsensors auch unter beengten Bauraumbedingungen möglich, da diese Geometrie ein Emittieren des primären Ultraschalls parallel zu einer Innenfläche des Schildrohrs erlaubt.
- Gemäß einem anderen exemplarischen Ausführungsbeispiel kann der Sensor ein elektromagnetischer Strahlungssensor sein. Alternativ zu einem Ultraschallsensor kann also auch ein Strahlungssensor verwendet werden, der auf der Emission und Detektion von elektromagnetischer Strahlung, wie zum Beispiel sichtbarem Licht, Ultraschall, Infrarot oder elektromagnetischer Strahlung eines anderen geeigneten Wellenlängenbereichs, basiert. Bei dem Einsatz elektromagnetischer Strahlungssensoren, zum Beispiel von Laserabstandsmessgeräten, ist bei dem erfindungsgemäßen Einsatz darauf zu achten, dass eine Verschmutzung entsprechender Komponenten vermieden wird oder dass bei erfolgter Verschmutzung diese Komponenten wieder gereinigt werden. Letzteres kann manuell oder mittels einer automatischen Reinigungsanlage, zum Beispiel einem Scheibenwischersystem, erfolgen.
- Gemäß einem exemplarischen Ausführungsbeispiel kann der Sensor eine elektromagnetische Strahlungsquelle zum Erzeugen und Richten von elektromagnetischer Strahlung auf den Tübbing aufweisen und einen elektromagnetischen Strahlungsdetektor zum Erfassen von an dem Tübbing reflektierter elektromagnetischer Strahlung aufweisen. Zum Beispiel kann die elektromagnetische Strahlungsquelle eine Laserquelle sein, die kohärentes Licht in Richtung des Tübbings emittiert. Das von dem Tübbing reflektierte Laserlicht kann dann ausgewertet werden, um den Abstand des Tübbings von dem Schildrohr zu ermitteln.
- Gemäß einem exemplarischen Ausführungsbeispiel kann das Schild ferner ein elektromagnetisches Strahlungsablenkelement zwischen der elektromagnetischen Strahlungsquelle und dem elektromagnetischen Strahlungsdetektor einerseits und dem Tübbing andererseits aufweisen, um elektromagnetische Strahlung von der elektromagnetischen Strahlungsquelle auf den Tübbing und von dem Tübbing auf den elektromagnetischen Strahlungsdetektor abzulenken. Gerade Laserabstandssensoren haben häufig eine relativ große Abmessung, die bei den beengten Verhältnissen im Grenzbereich eines Schildrohrs und eines kragenförmigen Stützrings besonders leicht montiert werden können, wenn eine Abstrahl- und Empfangsrichtung des Laserlichts parallel zur Vorschubrichtung ermöglicht wird. Bei Einsatz eines Ablenkprismas, eines Reflektorspiegels oder dergleichen kann auch ein solches relativ großes Laserabstandsmessgerät erfindungsgemäß eingesetzt werden.
- Gemäß einem exemplarischen Ausführungsbeispiel kann das Schild eine Mehrzahl von Sensoren (zum Beispiel zwischen drei und zehn, insbesondere sieben) mit den oben beschriebenen Merkmalen aufweisen, wobei die Sensoren entlang eines Umfangs des Schildrohrs verteilt sind. Insbesondere können die Sensoren umfänglich um eine Vorschubachse herum angeordnet sein. Auf diese Weise ist es möglich, die Schildschwanzluft um das gesamte Schildrohr herum überwachen zu können. Insbesondere können im Wesentlichen auf gegenüberliegenden Seiten des Schildrohrs angeordnete Sensoren korrelierte Abstandsinformationen liefern, da bei Verringern des einen Abstands der andere, gegenüberliegende Abstand vergrößert werden muss. Auf diese Weise kann mit einer teils redundanten Messung die Fehlerrobustheit des Systems weiter verbessert werden.
- Gemäß einem exemplarischen Ausführungsbeispiel kann ein Bodenbereich des Schildrohrs, welcher Bodenbereich bei bestimmungsgemäßer Verwendung in Kontakt mit dem Gebirge gerät, von Sensoren freigehalten sein. Zum Beispiel kann ein Bereich des Schildrohrs, der vom Boden weniger weit als 1 m, insbesondere weniger weit als 50 cm, entfernt ist, von Sensoren frei bleiben. Es ist auch möglich, dass der von Sensoren freigehaltene Bereich des Schildrohrs einem Winkelbereich von ±60°, insbesondere ±30°, um den bodennächsten Punkt des Schildrohrs herum entspricht. Dadurch ist vermieden, dass Sensoren durch Kontakt mit Erdreich, Flüssigkeit und sonstigem Gebirgsmaterial beschädigt oder zerstört werden.
- Gemäß einem exemplarischen Ausführungsbeispiel kann das Schild eine Verfüllstofftransportleitung zum Versorgen eines Zwischenraums zwischen den Tübbingen und der Bohrlochwandung mit Verfüllstoff, und eine Kabelverbindung, insbesondere eine stahlummantelte Kabelverbindung, zum Ausbilden einer elektrischen Verbindung zwischen dem Sensor und einem Partnergerät, insbesondere einer Sensorsignalauswerteeinheit zum Auswerten eines Signals des Sensors und/oder einer elektrischen Energieversorgungseinheit zum Versorgen des Sensors mit elektrischer Energie, aufweisen, wobei die Verfüllstofftransportleitung und die Kabelverbindung nebeneinander vorzugsweise beide entlang einer inneren Mantelfläche des Schildrohrs geführt sind. Über eine Verfüllstofftransportleitung, zum Beispiel eine Zementleitung, kann zur Fixierung des Tübbings Zement in den Ringraum zwischen Tübbing und Gebirge gepumpt werden. Allerdings kann nicht nur Zement verwendet werden, sondern es können alternativ oder ergänzend auch andere Verfüllstoffe wie Perlkies zum Einsatz kommen. Derartiger Verfüllstoff wird benötigt, um Tübbinge an der Bohrlochwandung zu befestigen, um dem Bohrloch vollumfänglich Stabilität zu verleihen. Da solche Verfüllstofftransportleitungen ohnehin entlang der Innenfläche des Schildrohrs geführt werden, ist das dazu parallele bzw. gemeinsame Führen von Auswerte- bzw. Versorgungsleitungen der Sensoren besonders platzsparend und im Wesentlichen ohne Zusatzaufwand möglich. Auch wird die Innenfläche des Schildrohrs, welche aufgrund des Führens von Leitungen besonders geschützt werden muss, klein gehalten.
- Gemäß einem exemplarischen Ausführungsbeispiel kann ein Außendurchmesser des Schildrohrs in einem Bereich zwischen ungefähr 2 m und ungefähr 15 m, insbesondere in einem Bereich zwischen ungefähr 4 m und ungefähr 13 m, liegen. Somit ist das erfindungsgemäße Schild für Tunnelbohrmaschinen unterschiedlichster Größe verwendbar.
- Gemäß einem exemplarischen Ausführungsbeispiel kann die Tunnelbohrmaschine eine Auswerteeinheit aufweisen, die zum Auswerten des von dem Sensor erfassten Sensorsignals eingerichtet ist, um den Abstand zwischen dem Schildrohr und dem zu verlegenden Tübbing zu ermitteln. Eine solche Auswerteeinheit kann ein Prozessor sein, der aus den Rohmessdaten die tatsächliche Abstandsinformation ermittelt.
- Gemäß einem exemplarischen Ausführungsbeispiel kann die Auswerteeinheit eingerichtet sein, ein vorbestimmtes Ereignis auszulösen, wenn der ermittelte Abstand einen vorbestimmten Schwellwert unterschreitet. Dieser Schwellwert kann zum Beispiel ungefähr 5 cm, insbesondere ungefähr 2 cm, betragen. Auf diese Weise kann vermieden werden, dass die Schildschwanzluft gefährlich klein wird. Wird sie zu Null, so kann dies zu einer Beschädigung der Tübbinge führen, da das Schildrohr dann an diesen entlang schrammt. Auch kann dies zu einem Steckenbleiben der gesamten Tunnelbohrmaschine führen, was erhebliche Standzeiten zur Folge haben kann.
- Gemäß einem exemplarischen Ausführungsbeispiel kann das vorbestimmte Ereignis ein Abschalten der Tunnelbohrmaschine, ein Ausgeben einer Warnung und/oder ein Anpassen eines Betriebsparameters der Tunnelbohrmaschine sein, um den Abstand wieder zu erhöhen. Andere oder mehrere Ereignisse können ebenfalls ausgelöst werden, wenn die Schildschwanzluft eine bestimmte Größe unterschreitet bzw. zu Null wird.
- Gemäß einem exemplarischen Ausführungsbeispiel kann die Tunnelbohrmaschine eine Tübbingverlegesteuereinheit aufweisen, die zum Steuern des Auskleidens der Bohrlochwandung mit Tübbingen basierend auf der für den Abstand indikativen Information ausgebildet ist. Das Verlegen der Tübbinge, welche als gekrümmte, im Wesentlichen trapezförmige Körper ausgebildet sein können, erfolgt gemäß vorbestimmter Regeln oder Algorithmen, in die eine Richtung des zu bohrenden Bohrlochs (Linkskurve, Rechtskurve, Steigung, Gefälle, oder Geradeausverlauf), aber auch die gegenwärtige Absolutposition der zu verlegenden Tübbinge bzw. die Relativposition zwischen Tübbingen und Schildrohr gehört. Es können trapezförmige Universaltübbinge verwendet werden, um alle Arten von Richtungen eines Bohrlochs auskleiden zu können. Der Verlegeprozess der Tübbinge unter Einsatz eines Erektors kann erfindungsgemäß gesteuert werden, um die hochpräzise aufgenommenen Sensordaten, die auf den Abstand zwischen Schildrohr und zu verlegenden Tübbingen schließen lassen, in diese Berechnung eingehen.
- Gemäß einem exemplarischen Ausführungsbeispiel kann die Tunnelbohrmaschine einen rotierbaren Bohrkopf an einem frontseitigen Ende der Tunnelbohrmaschine aufweisen, an dem eine Mehrzahl von Schneidelementen zum Abtragen des Gebirges angeordnet sind. Die Tunnelbohrmaschine kann ferner eine Vorschubeinrichtung aufweisen, die zum Ausüben einer Vorschubkraft zum Vorschieben des Bohrkopfes gegen das Gebirge aufweist. Gemäß einem exemplarischen Ausführungsbeispiel kann die Tunnelbohrmaschine einen Gripper aufweisen, der eingerichtet ist, die Tunnelbohrmaschine mittels Verspannens gegen das Gebirge (in einer Richtung senkrecht zu der Vorschubrichtung) vorübergehend ortsfest abzustützen. Gemäß einem exemplarischen Ausführungsbeispiel kann die Tunnelbohrmaschine einen Erektor aufweisen, der zum Verlegen der Tübbinge entlang der Bohrlochwandung ausgebildet ist. Ferner kann die Tunnelbohrmaschine einen bezogen auf die Vorschubrichtung rückseitig angeordneten Nachzug aufweisen, der Versorgungseinrichtungen zum Versorgen der Tunnelbohrmaschine aufweist.
- Zur Maschinensteuerung der Tunnelbohrmaschine durch ein Steuerleitsystem kann zunächst unter Verwendung eines Kameramesssystems eine Frontschildposition ermittelt werden. Mittels eines Theodolitsystems kann die Positionierung eines Gripperschilds ermittelt werden. Dadurch ist ein georeferenziertes Einmessen von Frontschild und Gripperschild möglich. Mit einer Zweiachsen-Neigungssensormessung in horizontaler und vertikaler Messrichtung kann auch eine Orientierungsinformation bestimmt werden. Somit sind die Position von Frontschild und Gripperschild stets bekannt. Ferner ist die Geometrie des ausgebrochenen Hohlraums oder Bohrlochs bekannt. Die Auskleidung der Bohrlochwandung mit Tübbingen soll nun der Schildachse folgen, da ansonsten die Schildschwanzluft gegen Null geht und die Tübbinge beschädigt werden können. Um das Auskleiden der Bohrlochwandung mit Tübbingen zu steuern, ist noch die Information erforderlich, wie die Tübbinge relativ zu dem Schildschwanz orientiert sind, um eine korrekte Steuerung durchzuführen. Mit der erfindungsgemäßen Abstandsmessung zwischen zu verlegenden Tübbingen und Schildrohr kann gesteuert werden, wie die Tübbinge verlegt werden sollen. Basierend auf dem erfindungsgemäß aufgenommenen Sensorsignal wird die Auskleidung der Bohrlochwandung mit Tübbingen gesteuert, wobei das Sensorsignal als Eingangsparameter für die Berechnung der Tübbingverkleidung dient.
- Im Folgenden werden exemplarische Ausführungsbeispiele der vorliegenden Erfindung mit Verweis auf die folgenden Figuren detailliert beschrieben.
-
Fig. 1 und Fig. 2 zeigen eine Tunnelbohrmaschine gemäß einem exemplarischen Ausführungsbeispiel der Erfindung in zwei unterschiedlichen Betriebszuständen. -
Fig. 3 zeigt eine Darstellung eines Schildschwanzes, das erfindungsgemäß mit einem Sensor ausgestattet ist. -
Fig. 4 bis Fig. 7 zeigen unterschiedliche Schilde für Tunnelbohrmaschinen gemäß exemplarischen Ausführungsbeispielen der Erfindung. - Gleiche oder ähnliche Komponenten in unterschiedlichen Figuren sind mit gleichen Bezugsziffern versehen.
-
Fig. 1 zeigt einen Querschnitt durch ein Bohrloch 104, das in einem Gebirge 102 mittels einer Tunnelbohrmaschine 100 gemäß einem exemplarischen Ausführungsbeispiel der Erfindung gebohrt wird. -
Fig. 1 zeigt die Tunnelbohrmaschine 100 zu Beginn eines Arbeitshubes, während dem ein Bohrkopf 106 der Tunnelbohrmaschine 100 sich vorwärts, das heißt gemäßFig. 1 nach links, in das Gebirge 102 vorarbeitet und dabei Gestein des Gebirges 102 unter Ausbilden eines sich sukzessive vergrößernden Bohrlochs 104 abträgt. - Bei der Tunnelbohrmaschine 100 ist ein Gripper 110 gezeigt, der sich in gemäß
Fig. 1 vertikaler Richtung gegen das Gebirge 102 verkeilen oder verspreizen kann, um einen Abschnitt der Tunnelbohrmaschine 100 an dieser Position vorübergehend zu verankern. Ein Vorschubzylinder 108, der mittels Elektromotoren 120 angetrieben wird, drückt den Bohrkopf 106 gemäßFig. 1 nach links in Vortriebsrichtung, so dass Schneidelemente an einer Frontwand des Bohrkopfes 106 in einer dem Fachmann bekannten Art und Weise das Material des Gebirges 102 abtragen und dabei das Bohrloch 102 zunehmend weiter bohren. Ein Hub der Tunnelbohrmaschine 100, zum Beispiel in der Größenordnung zwischen 1 m und 2 m, entspricht einer Dimension, über die hinweg Kolben des Vorschubzylinders 108 ausgefahren werden können, um den Bohrkopf 106 nach vorne treiben. Am Ende eines solchen Vortriebs hat sich der Bohrkopf 106 von dem Nachzug der Tunnelbohrmaschine 100, das heißt den gemäßFig. 1 rechtsseitigen Teil der Tunnelbohrmaschine 100, entfernt und der Vorschubzylinder 108 hat seine maximale Expansionsstellung erreicht. In diesem Betriebszustand muss der Vorschubzylinder 108 wieder in seine Ausgangsposition zurückgebracht werden und muss der Nachzug der Tunnelbohrmaschine 100 nachgeführt werden, bevor ein nächster Hub der Tunnelbohrmaschine 100 ausgeführt werden kann. - Hierfür muss zunächst die Verspannung des Grippers 110 gegenüber dem umgebenden Gebirge 102 gelöst werden. Dann kann, wenn der Vorschubzylinder 108 seine maximale Expansionsstellung erreicht hat (wie in
Fig. 2 gezeigt), der Vorschubzylinder 108 und alle gemäßFig. 1 und Fig. 2 davon rechts vorgesehenen Komponenten nach links nachgeführt werden. - Ein noch nicht mit Tübbingen 114 ausgekleideter Teil der Bohrlochwandung, das heißt der Grenzoberfläche zwischen Gebirge 102 und Bohrloch 104, wird fortlaufend mit weiteren Tübbingen 112 ausgekleidet. Die Tübbinge 112 können als im Wesentlichen trapezförmige, aber leicht gekrümmte Körper angesehen werden, welche umfänglich um das im Wesentlichen kreisförmige Bohrloch 104 auf die Bohrlochwandung aufgesetzt werden und dort mit Verfüllstoff befestigt werden. Tübbing 112 ist derjenige Tübbing, der gegenwärtig gerade zum Auskleiden der Bohrlochwandung vorbereitet bzw. verwendet wird. Die eigentliche Auskleidung und Handhabung der Tübbinge 112 erfolgt mittels eines Erektors 120.
- Ein Schildrohr 118 eines Schilds schützt den Gripper 110, den Erektor 120 und andere Komponenten der Tunnelbohrmaschine 100 vor unerwünschten Einflüssen der Umgebung. Zu solchen unerwünschten Einflüssen zählt das Herabfallen von lockerem Gestein des Gebirges 102 am Rand der Bohrlochwandung. Der Hohlzylinder aus Stahl, welcher das Schildrohr 118 bildet, legt sich allseitig schützend um die Komponenten der Tunnelbohrmaschine 100, die er umgibt. Im Weiteren zu verlegende Tübbinge 112 werden vor dem Handhaben durch den Erektor 120 im Inneren des Schildrohrs 118 positioniert. Anders ausgedrückt befindet sich das Schildrohr 118 in diesem Betriebszustand zwischen der Bohrlochwandung einerseits und dem im Weiteren zu verlegenden Tübbingen 112 andererseits.
- In
Fig. 1 ebenfalls gezeigt ist schematisch ein Stützring 122 des Schildrohrs 118, der sich an einem - bezogen auf die Vortriebsrichtung - rückwärtigen Ende des Schildrohrs 118 befindet. Der Stützring 122 ist, obgleich dies inFig. 1 und Fig. 2 nicht zu erkennen ist, als ein sich nach innen erstreckender, ringscheibenförmiger Kragen ausgebildet, der rechtwinklig gegenüber der ansonsten hohlzylindrischen Rohrwandung des Schildrohrs 118 abgewinkelt ist und das auch als Schildschwanz bezeichnete Ende des Schilds bildet. - Um die zu verlegenden Tübbinge 112 präzise handhaben zu können, ist die Kenntnis von deren Position erforderlich. Ferner ist erforderlich, dass die sogenannte Schildschwanzluft, das heißt ein gemäß
Fig. 1 vertikaler Abstand zwischen Schildrohr 118 und dem dem Schildrohr 118 zugewandten Ende des jeweiligen Tübbings 112, stets größer als Null bleibt. Wird die Schildschwanzluft zu Null, schrammt der zu verlegende Tübbing 112 anschaulich an einer Innenseite des Schildrohrs 118 entlang und kann dabei beschädigt werden. Es ist auch möglich, dass die gesamte Tunnelbohrmaschine 100 stecken bleibt, wenn die Schildschwanzluft Null wird. - Um die Größe dieses Abstands sensorisch zu überwachen, ist erfindungsgemäß mindestens ein Sensor 116 an einer inneren Mantelfläche des Schildrohrs 118 angebracht, um von dort den jeweiligen Abstand zwischen Schildrohr 118 und dem zu verlegenden Tübbing 112 zu messen. Unterschiedliche Ausgestaltungen des Sensors 116 und unterschiedliche Montageformen werden unten Bezug nehmend auf
Fig. 4 bis Fig. 7 anhand beispielhafter Ausführungsformen näher erläutert. -
Fig. 3 zeigt aber zunächst noch eine Ansicht 300 des Inneren des erfindungsgemäß mit einem Sensor 116 ausgestatteten Schildrohrs 118 am Schildschwanz. Auch der endseitige Kragen, welcher den Stützring 122 bildet, ist inFig. 3 zu erkennen. Weitere Komponenten der Tunnelbohrmaschine 100 im Inneren des Schildrohrs 118 sind inFig. 3 ebenfalls gezeigt, werden aus Gründen der Kürze aber nicht näher beschrieben. - Es ist ferner in
Fig. 3 gezeigt, dass sich zwei Verfüllstofftransportleitungen 304 entlang einer inneren Mantelfläche in axialer Richtung erstrecken. Diese Verfüllstofftransportleitungen 304 dienen dem Zuführen von Verfüllstoff zwischen Bohrlochwandung und Tübbingen, um die Tübbinge an der Bohrlochwandung zu immobilisieren. - Erfindungsgemäß ist nun der Sensor 116 zum Erfassen des Abstands zwischen Schildrohr 118 und dem zu verlegenden Tübbing 112 (nicht gezeigt in
Fig. 3 ) an einer Grenze zwischen dem Stützring 122 und der Innenfläche des hohlzylindrischen Abschnitts des Schildrohrs 118 angebracht. Der Sensor 116, zum Beispiel ein Ultraschallsensor, benötigt Energie zum Betrieb, welche über eine Stromleitung 302 zugeführt wird. Vorteilhaft ist die Stromleitung 302 parallel zu den Verfüllstoffversorgungsleitungen 304 verlaufend angeordnet und befindet sich in deren unmittelbarer Nähe, so dass etwaige Behinderungen der Bautätigkeit, die durch das Vorsehen der Leitungen 302, 304 einhergehen, gering gehalten werden. - Auch kann die Leitung 302 zum Übermitteln elektrischer Sensorsignale von dem Sensor 116 an eine in
Fig. 3 nicht gezeigte Tübbingverlegesteuereinheit dienen. Diese verwendet unter anderem die Sensorinformation des Sensors 116, um das Verlegen der Tübbinge zu steuern. Für dieses Steuern ist die genaue Kenntnis der Position der Tübbinge ebenso erforderlich wie weitere Geometrieinformationen (zum Beispiel die Lage von Gripperschild und Frontschild, welche unter Verwendung von Kameramesssystemen bzw. von Theodoliten ermittelt werden können). Dem Fachmann ist an sich bekannt, wie eine solche Steuerung des Verlegens der Tübbinge vorzunehmen ist. Erfindungsgemäß kann jedoch aufgrund des Anordnens der Sensoren 116 an einer Innenfläche des Schildrohrs 118 die Sensorinformation mit hoher Präzision und sehr fehlerrobust geliefert werden. In der schmutzigen Atmosphäre eines Bohrlochs kann ein im Inneren des Schildrohrs 118 angeordneter Sensor 116 gut geschützt betrieben werden. Auch ist aufgrund des kragenförmigen Umstülpens des Stützrings 122 ein mechanischer Schutz des Sensors 116 gegeben. -
Fig. 4 zeigt nun eine Querschnittansicht eines Schilds 400 einer Tunnelbohrmaschine 100, das durch das Schildrohr 118 mit seiner endseitigen Ringscheibe als Stützring 122 gebildet ist. Ein Pfeil inFig. 4 zeigt die Vortriebsrichtung der Tunnelbohrmaschine 100 an, das heißt die Richtung, entlang der sich ein Bohrkopf 106 (nicht gezeigt inFig. 4 ) sukzessive in das Gebirge 102 vorarbeitet. Obgleich dies in der Querschnittansicht vonFig. 4 nicht zu erkennen ist, läuft der Stützring 122 vollumfänglich um den hohlkreiszylindrischen Abschnitt des Schildrohrs 118. -
Fig. 4 zeigt schematisch eine Mehrzahl von Tübbingen 112, 114. Tübbinge 112 sollen gegenwärtig verlegt werden und befinden sich in dem gezeigten Betriebszustand in einem jeweiligen Abstand zu der Innenfläche des Schildrohrs 118. Für den gemäßFig. 4 oben gezeigten Tübbing 112 ist der Abstand mit d bezeichnet. - In
Fig. 4 ist ferner gezeigt, dass ein Ultraschallsensor 116 auf die innere Mantelfläche des Schildrohrs 118 aufgesetzt und dort unbeweglich befestigt ist. Der Ultraschallsensor 116 enthält eine Ultraschallquelle zum Emittieren von primärem Ultraschall 402 auf den zu verlegenden Tübbing 112. Sekundärer Ultraschall 404, der an dem Tübbing 112 reflektiert wird, wird von einem Ultraschalldetektor des Ultraschallsensors 116 detektiert. Aus dem erfassten Sensorsignal kann der Ultraschallsensor 116 den Abstand zu dem zu verlegenden Tübbing 112 bestimmen (insbesondere den Abstand bezogen auf eine vorgebbare Referenzposition, zum Beispiel die Position des Ultraschallsensors 116 oder die Innenfläche des Schildrohrs 118). Der Stützring 122 dient der Abschirmung des Sensors 116 vor unerwünschten Einflüssen der Umgebung und als mechanischer Schutz des Sensors 116 vor Beschädigungen. -
Fig. 4 zeigt ferner ein Versorgungs- und Signaltransportkabel 302, das sich von dem Ultraschallsensor 116 aus in axialer Richtung entlang einer Innenfläche des Schildrohrs 118 erstreckt. Das Kabel 302 kann stahlummantelt sein, um es an die rauen Bedingungen im Arbeitsbereich einer Tunnelbohrmaschine 100 anzupassen. Das Versorgungs- und Signaltransportkabel 302 versorgt den Ultraschallsensor einerseits mit elektrischer Energie. Andererseits übermittelt der Ultraschallsensor über das Versorgungs- und Signaltransportkabel 302 die detektierte Sensorinformation an ein Auswertegerät (nicht gezeigt). -
Fig. 5 zeigt schematisch und im Querschnitt nur einen unteren Teil eines Schildrohrs 118 eines Schilds 400 gemäß einem anderen exemplarischen Ausführungsbeispiel der Erfindung. - In
Fig. 5 ist ein Laserabstandsmessgerät 116 als Sensor vorgesehen. Das Laserabstandsmessgerät 116 emittiert kohärentes monochromatisches Laserlicht 502 in gemäßFig. 5 horizontaler Richtung. Dieses primäre Laserlicht 502 wird durch ein optisches Prisma 500 um 90° auf den Tübbing 112 abgelenkt, von dort reflektiert und gelangt wiederum über das optische Prisma 500 in Form von Sekundärstrahlung 504 zu einem lichtempfindlichen Element des Laserabstandsmessgeräts 116. Die Konfiguration mit dem Prisma 500 erlaubt es, in besonders beengter Umgebung Lasermessgeräte 116 einzusetzen, da diese anschaulich mit ihrer flachen, großflächigen Seite auf das Innere des Schildrohrs 118 montiert werden können und in horizontaler Richtung das primäre Laserlicht 502 emittieren können. Es liegt selbstverständlich im Umfang der Erfindung, das Laserabstandsmessgerät 116 in einer Vertikalbaukonstruktion ohne optisches Prisma 500 oder dergleichen auszugestalten, in der das Licht gemäßFig. 1 in rein vertikaler Richtung zwischen dem Laserabstandsmessgerät 116 und dem Tübbing 112 läuft, wie dies inFig. 4 für den Ultraschallsensor 116 gezeigt ist. -
Fig. 6 entspricht dem Ausführungsbeispiel vonFig. 4 , wobei der Ultraschallsensor 116 nun in das Innere des Schildrohrs 118 integriert ist, so dass seine Oberfläche bündig mit einer inneren Mantelfläche des Schildrohrs 118 abschließt bzw. fluchtet. Dadurch ist der Ultraschallsensor 116 besonders gut vor mechanischen Einflüssen der Umgebung geschützt. -
Fig. 7 zeigt ein Schild 400 gemäß noch einem anderen exemplarischen Ausführungsbeispiel der Erfindung, bei dem der Sensor 116 in den Stützring 122 integriert ist, wohingegen ein Ultraschallreflexionsprisma 700 an einer inneren Oberfläche des Schildrohrs 118 befestigt ist. Die primäre Ultraschallstrahlung 402 wird von dem Sensor 116 ausgesandt, an dem Ultraschallreflexionsprisma 700 nach oben in Richtung des zu verlegenden Tübbings 112 hin reflektiert und gelangt nach Reflexion an letzterem und nach abermaliger Reflexion an dem Ultraschallreflexionsprisma 700 zu einem Ultraschalldetektor des Ultraschallsensors 116. - Wie in
Fig. 7 mit gepunkteten Linien angedeutet, muss der Ultraschallsensor 116 nicht zwingend in den Stützring 122 integriert sein, sondern kann auch auf diesen überstehend aufgesetzt sein. In beiden Fällen dient der Stützring 122 als Schutz vor mechanischen Beschädigungen. - Ergänzend ist darauf hinzuweisen, dass "aufweisend" keine anderen Elemente oder Schritte ausschließt und "eine" oder "ein" keine Vielzahl ausschließt. Ferner sei darauf hingewiesen, dass Merkmale oder Schritte, die mit Verweis auf eines der obigen Ausführungsbeispiele beschrieben worden sind, auch in Kombination mit anderen Merkmalen oder Schritten anderer oben beschriebener Ausführungsbeispiele verwendet werden können. Bezugszeichen in den Ansprüchen sind nicht als Einschränkung anzusehen.
Claims (15)
- Schild (400) für eine Tunnelbohrmaschine (100) zum Bohren eines Bohrlochs (104) in einem Gebirge (102), wobei das Schild (400) aufweist:ein Schildrohr (118) zum Schützen eines Abschnitts der Tunnelbohrmaschine (100) vor sich von einer Bohrlochwandung lösendem Gebirgematerial, wobei das Schildrohr (118) vorübergehend zwischen einem zu verlegenden Tübbing (112) zum Auskleiden der Bohrlochwandung einerseits und der Bohrlochwandung andererseits anzuordnen ist;einen an und/oder in dem Schildrohr (118) angeordneten Sensor (116) zum Detektieren einer für einen Abstand zwischen dem Schildrohr (118) und dem zu verlegenden Tübbing (112) indikativen Information.
- Schild (400) gemäß Anspruch 1, wobei das Schildrohr (118) einen zumindest teilumfänglichen, insbesondere vollumfänglichen, Stützring (122) an einem in Vorschubrichtung der Tunnelbohrmaschine (100) rückseitigen Ende des Schildrohrs (118) aufweist.
- Schild (400) gemäß Anspruch 2, ferner aufweisend zumindest eines der folgenden Merkmale:der Stützring (122) und eine Mantelfläche des Schildrohrs (118) sind einstückig, insbesondere einstoffig, ausgebildet;der Stützring (122) ragt ausgehend von einer hohlzylindrisch ausgebildeten und endseitig offenen Mantelfläche des Schildrohrs (118) kragenförmig nach innen;der Sensor (116) ist an und/oder in einer der Bohrlochwandung abgewandten inneren Mantelfläche des Schildrohrs (118) angrenzend an den Stützring (122) angeordnet.der Sensor (116) ist an und/oder in einer der Bohrlochwandung abgewandten inneren Mantelfläche des Schildrohrs (118) angrenzend an den Stützring (122) angeordnet, wobei der Sensor (116) über die innere Mantelfläche weniger weit hervorsteht als der Stützring (122).
- Schild (400) gemäß einem der Ansprüche 1 bis 3, ferner aufweisend zumindest eines der folgenden Merkmale:der Sensor (116) ist an einem in Vorschubrichtung der Tunnelbohrmaschine (100) rückseitigen Ende eines Schildschwanzes des Schildrohrs (118) angeordnet;der Sensor ist ein Ultraschallsensor (116) oder ein elektromagnetischer Strahlungssensor (116);der Sensor (116) weist eine Ultraschallquelle zum Erzeugen und Richten von Ultraschall auf den Tübbing (112) auf und weist einen Ultraschalldetektor zum Erfassen von an dem Tübbing (112) reflektiertem Ultraschall auf;der Sensor (116) weist eine Ultraschallquelle zum Erzeugen und Richten von Ultraschall auf den Tübbing (112) auf und weist einen Ultraschalldetektor zum Erfassen von an dem Tübbing (112) reflektiertem Ultraschall auf, ferner aufweisend ein Ultraschallablenkelement (700) zwischen der Ultraschallquelle und dem Ultraschalldetektor einerseits und dem Tübbing (112) andererseits, um Ultraschall von der Ultraschallquelle auf den Tübbing (112) und von dem Tübbing (112) auf den Ultraschalldetektor abzulenken;ein Außendurchmesser des Schildrohrs (118) liegt in einem Bereich zwischen 2 m und 15 m, insbesondere in einem Bereich zwischen 4 m und 13 m;der Sensor (116) ist an und/oder in einer der Bohrlochwandung abgewandten inneren Mantelfläche des Schildrohrs (118) angeordnet.
- Schild (400) gemäß einem der Ansprüche 1 bis 4, wobei der Sensor (116) eine elektromagnetische Strahlungsquelle zum Erzeugen und Richten von elektromagnetischer Strahlung auf den Tübbing (112) aufweist und einen elektromagnetischen Strahlungsdetektor zum Erfassen von an dem Tübbing (112) reflektierter elektromagnetischer Strahlung aufweist.
- Schild (400) gemäß Anspruch 5, ferner aufweisend ein elektromagnetisches Strahlungsablenkelement (500) zwischen der elektromagnetischen Strahlungsquelle und dem elektromagnetischen Strahlungsdetektor einerseits und dem Tübbing (112) andererseits, um elektromagnetische Strahlung von der elektromagnetischen Strahlungsquelle auf den Tübbing (112) und von dem Tübbing (112) auf den elektromagnetischen Strahlungsdetektor abzulenken.
- Schild (400) gemäß einem der Ansprüche 1 bis 6, aufweisend eine Mehrzahl von Sensoren (116) mit den Merkmalen gemäß einem der Ansprüche 1 bis 6, wobei die Sensoren entlang eines Umfangs des Schildrohrs (118), insbesondere umfänglich um eine Vorschubachse herum, verteilt sind.
- Schild (400) gemäß Anspruch 7, wobei ein Bodenbereich des Schildrohrs (118), der bei bestimmungsgemäßer Verwendung in Kontakt mit dem Gebirge (102) am Bohrlochboden gerät, von Sensoren (116) freigehalten ist.
- Schild (400) gemäß einem der Ansprüche 1 bis 8, aufweisend:eine Verfüllstofftransportleitung (304) zum Versorgen eines Zwischenraums zwischen den Tübbingen (112, 114) und der Bohrlochwandung mit Verfüllstoff, um die Tübbinge (112, 114) an der Bohrlochwandung zu befestigen;eine Kabelverbindung (302), insbesondere eine stahlummantelte Kabelverbindung, zum Ausbilden einer elektrischen Verbindung zwischen dem Sensor (116) und einem Partnergerät, insbesondere einer Auswerteeinheit zum Auswerten eines Signals des Sensors (116) und/oder einer elektrischen Energieversorgungseinheit zum Versorgen des Sensors (116) mit elektrischer Energie;wobei die Verfüllstofftransportleitung (304) und die Kabelverbindung (302) nebeneinander, insbesondere parallel zueinander, entlang einer inneren Mantelfläche des Schildrohrs (118) geführt sind.
- Tunnelbohrmaschine (100) zum Bohren eines Bohrlochs (104) in einem Gebirge (102), wobei die Tunnelbohrmaschine (100) ein Schild (400) gemäß einem der Ansprüche 1 bis 9 aufweist.
- Tunnelbohrmaschine (100) gemäß Anspruch 10, aufweisend eine Auswerteeinheit, die zum Auswerten eines von dem Sensor (116) erfassten Sensorsignals eingerichtet ist, um den Abstand zwischen dem Schildrohr (118) und dem zu verlegenden Tübbing (112) zu ermitteln.
- Tunnelbohrmaschine (100) gemäß Anspruch 11, wobei die Auswerteeinheit eingerichtet ist, ein vorbestimmtes Ereignis auszulösen, wenn der ermittelte Abstand einen vorbestimmten Schwellwert, insbesondere 5 cm, weiter insbesondere 2 cm, unterschreitet.
- Tunnelbohrmaschine (100) gemäß Anspruch 12, wobei das vorbestimmte Ereignis ausgewählt ist aus einer Gruppe, die besteht aus einem Abschalten der Tunnelbohrmaschine (100), dem Ausgeben einer Warnung, und dem Anpassen eines Betriebsparameters der Tunnelbohrmaschine (100), um den Abstand wieder zu erhöhen.
- Tunnelbohrmaschine (100) gemäß einem der Ansprüche 10 bis 13, ferner aufweisend zumindest eines der folgenden Merkmale:die Tunnelbohrmaschine (100) weist eine Tübbingverlegesteuereinheit auf, die zum Steuern des Auskleidens der Bohrlochwandung mit Tübbingen (112, 114) unter Verwendung der für den Abstand indikativen Information ausgebildet ist;einen rotierbaren Bohrkopf (106) an einem frontseitigen Ende der Tunnelbohrmaschine (100), an dem eine Mehrzahl von Schneidelementen zum Abtragen des Gebirges (102) angeordnet sind;eine Vorschubeinrichtung (108), die zum Ausüben einer Vorschubkraft zum Vorschieben eines Bohrkopfes (106) gegen das Gebirge (102) ausgebildet ist;einen Gripper (110), der ausgebildet ist, die Tunnelbohrmaschine (100) mittels Verspannens gegen das Gebirge (102) vorübergehend ortsfest abzustützen;einen Erektor (120), der zum Verlegen der Tübbinge (110, 112) entlang der Bohrlochwandung ausgebildet ist;einen bezogen auf eine Vorschubrichtung rückseitig angeordneten Nachzug, der Versorgungseinrichtungen zum Versorgen der Tunnelbohrmaschine (100) aufweist.
- Verfahren zum Steuern des Auskleidens einer Bohrlochwandung eines mittels einer Tunnelbohrmaschine (100) zu bohrenden Bohrlochs (104) mit Tübbingen (112), wobei das Verfahren aufweist:Anordnen eines Schildrohrs (118) eines Schilds (400) der Tunnelbohrmaschine (100) zwischen einem zu verlegenden Tübbing (112) einerseits und der Bohrlochwandung andererseits, um einen Abschnitt der Tunnelbohrmaschine (100) vor sich von der Bohrlochwandung lösendem Gebirgematerials zu schützen,Detektieren einer für einen Abstand zwischen dem Schildrohr (118) und dem zu verlegenden Tübbing (112) indikativen Information mittels mindestens eines an und/oder in dem Schildrohr (118) angeordneten Sensors (116), undSteuern des Verlegens des zu verlegenden Tübbings (112) an der Bohrlochwandung basierend auf der detektierten Information.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE201220104780 DE202012104780U1 (de) | 2012-12-07 | 2012-12-07 | Tübbing-Abstandssensor für Tunnelbohrmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2740895A2 true EP2740895A2 (de) | 2014-06-11 |
| EP2740895A3 EP2740895A3 (de) | 2016-04-20 |
Family
ID=47991086
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP13196094.0A Withdrawn EP2740895A3 (de) | 2012-12-07 | 2013-12-06 | Tübbing-Abstandssensor für Tunnelbohrmaschine |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2740895A3 (de) |
| DE (1) | DE202012104780U1 (de) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108361042B (zh) * | 2018-03-11 | 2019-10-29 | 北京工业大学 | 一种模拟浅埋盾构隧道开挖面被动破坏的试验方法 |
| CN209145612U (zh) * | 2018-11-12 | 2019-07-23 | 西南交通大学 | 一种用于盾构隧道的抗浮型管片 |
| IL294372B2 (en) * | 2019-12-31 | 2023-12-01 | Herrenknecht Ag | Method and device for automatically arranging tunnel lining segments |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0637832B2 (ja) * | 1989-06-16 | 1994-05-18 | 株式会社クボタ建設 | 三等分割セグメントによる小口径シールド工法および該工法の実施に使用するシールド掘進機 |
| JP2809380B2 (ja) * | 1994-02-07 | 1998-10-08 | 三菱重工業株式会社 | シールド掘削機のテールクリアランス計測装置及びシールド掘削機の姿勢制御装置 |
| JPH07233695A (ja) * | 1994-02-23 | 1995-09-05 | Kajima Corp | 自走式テールクリアランス計測装置 |
| JPH07238779A (ja) * | 1994-03-02 | 1995-09-12 | Mitsubishi Heavy Ind Ltd | シールド掘削機のテールクリアランス計測装置 |
| JPH11280378A (ja) * | 1998-03-31 | 1999-10-12 | Hitachi Zosen Corp | シールド掘進機におけるテール部のクリアランス計測方法および計測装置 |
| JP3346737B2 (ja) * | 1998-04-06 | 2002-11-18 | 戸田建設株式会社 | シールド掘進機のテールクリアランス測定方法及び測定装置 |
| JP5156860B2 (ja) * | 2011-12-22 | 2013-03-06 | 鹿島建設株式会社 | シールド機 |
-
2012
- 2012-12-07 DE DE201220104780 patent/DE202012104780U1/de not_active Expired - Lifetime
-
2013
- 2013-12-06 EP EP13196094.0A patent/EP2740895A3/de not_active Withdrawn
Non-Patent Citations (1)
| Title |
|---|
| None |
Also Published As
| Publication number | Publication date |
|---|---|
| DE202012104780U1 (de) | 2013-02-27 |
| EP2740895A3 (de) | 2016-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE10085344B4 (de) | Armierter Detektor | |
| EP2543770B1 (de) | Vorrichtung und Verfahren zum Vermessen von Düsenstrahlsäulen im Untergrund | |
| TR201807098T4 (tr) | Borulanmış bir deliğin üretilmesi için sondaj aygıtı ve bir sondaj aygıtının işletimi için yöntem. | |
| DE102008026456B4 (de) | Bohrkopf | |
| EP2607003B1 (de) | Vorrichtung zur Trennung eines Untergrundes und Verfahren zur Steuerung einer derartigen Trennvorrichtung | |
| DE3009837C2 (de) | Vorrichtung zum unterirdischen Verlegen von Rohrleitungen | |
| US9803477B2 (en) | Fiber optic shape sensing adapted to cutter module of highwall miner | |
| EP3296467B1 (de) | Tiefbaugerät und tiefbauverfahren | |
| EP2489823A1 (de) | Vorrichtung zum Spalten von festen Materialien | |
| EP2740895A2 (de) | Tübbing-Abstandssensor für Tunnelbohrmaschine | |
| DE4414578C2 (de) | Vorrichtung zur automatischen Einstellung des Schneidhorizontes einer Bergbau-Gewinnungsanlage | |
| DE19982113C1 (de) | Steuerung für den Strebausbau | |
| EP3530813B1 (de) | Verfahren zur tiefenmessung der verrohrung bei der pfahlgründung sowie anbaugerät für die pfahlgründung | |
| DE102013020761B4 (de) | Verriegelungsvorrichtung und -verfahren für die Werkzeugaufnahme einer Drehbohranlage | |
| DE4131673C2 (de) | Steuereinrichtung für eine Tunnelbohrmaschine | |
| DE102022129860B3 (de) | Tunnelbohrmaschine und Verfahren zum Verbauen von Tübbingen | |
| DE102012112411B3 (de) | Pressbohrlenkvorrichtung | |
| DE102013205319A1 (de) | Bohr- und Düsenstrahlgestänge | |
| EP1319757A2 (de) | Einbringen von Pfosten für Leitplankensysteme | |
| EP3819433B1 (de) | Bodenabtragsvorrichtung und verfahren zum erstellen eines loches im boden | |
| EP1911929A1 (de) | Verfahren zur Bestimmung der Veränderung der Lage von Tübbingringen | |
| DE202012102496U1 (de) | Fehlerrobuste Sensorik zum Ermitteln einer räumlichen Beziehung zwischen Anlagenkomponenten unter rauen Bedingungen | |
| DE4237689C2 (de) | Verfahren zum Ermitteln des radialen Abstandes zwischen der Innenfläche des rückwärtigen Teils eines Vortriebsschildes und der Außenfläche einer Tübbingauskleidung | |
| DE202010007383U1 (de) | Verlegevorrichtung zum Verlegen eines Flachbandes im Erdreich | |
| EP2896752A1 (de) | Verfahren und System zum Verlegen von vor mechanischen Beanspruchungen geschützten Leitungen |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20131206 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E21D 11/40 20060101ALI20160317BHEP Ipc: E21D 9/06 20060101AFI20160317BHEP |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 20161021 |