EP2740548B1 - Installation de nettoyage de conteneurs à déchets - Google Patents
Installation de nettoyage de conteneurs à déchets Download PDFInfo
- Publication number
- EP2740548B1 EP2740548B1 EP12356028.6A EP12356028A EP2740548B1 EP 2740548 B1 EP2740548 B1 EP 2740548B1 EP 12356028 A EP12356028 A EP 12356028A EP 2740548 B1 EP2740548 B1 EP 2740548B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cleaning
- installation
- container
- relative
- nozzle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B9/00—Cleaning hollow articles by methods or apparatus specially adapted thereto
- B08B9/08—Cleaning containers, e.g. tanks
- B08B9/0804—Cleaning containers having tubular shape, e.g. casks, barrels, drums
- B08B9/0813—Cleaning containers having tubular shape, e.g. casks, barrels, drums by the force of jets or sprays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B9/00—Cleaning hollow articles by methods or apparatus specially adapted thereto
- B08B9/08—Cleaning containers, e.g. tanks
- B08B9/093—Cleaning containers, e.g. tanks by the force of jets or sprays
- B08B9/0936—Cleaning containers, e.g. tanks by the force of jets or sprays using rotating jets
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65F—GATHERING OR REMOVAL OF DOMESTIC OR LIKE REFUSE
- B65F7/00—Cleaning or disinfecting devices combined with refuse receptacles or refuse vehicles
- B65F7/005—Devices, mounted on refuse collecting vehicles, for cleaning or disinfecting refuse receptacles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65F—GATHERING OR REMOVAL OF DOMESTIC OR LIKE REFUSE
- B65F2210/00—Equipment of refuse receptacles
- B65F2210/165—Remote controls
Definitions
- the present invention relates to a waste container cleaning installation.
- non-movable refuse containers For the storage of household waste, it is known to use non-movable refuse containers surface or buried and centralized in specific locations. These garbage containers generally have a waste storage tank located below the level of the pavement or sidewalk and an outer portion including openings through which people can dispose of their waste.
- waste container cleaning facilities When the waste containers are emptied, they must be cleaned on site. For such cleaning, it is known to integrate in truck-moving trailers waste container cleaning facilities. Such installations are equipped with a cleaning compartment comprising in particular a central jet nozzle for high-pressure water jets adapted to cleaning the inner surface of the container, tanks of clean water and waste water, a technical center and a control gateway.
- the containers to be cleaned are lifted by means of a crane and lowered into the cleaning compartment, in a vertical position supported by the crane.
- the bottom of the buried containers is opened so that the central protective nozzle is covered by the container, which allows the interior surfaces of the container to be cleaned.
- the outside of the container is usually cleaned by an operator equipped with a high-pressure spray lance and positioned on the control bridge, while the container is lifted over the installation by means of the crane.
- a high-pressure spray lance and positioned on the control bridge, while the container is lifted over the installation by means of the crane.
- Such a process requires manpower to perform the cleaning and control of the crane and is unsatisfactory for environmental reasons, cleaning water flowing into the surrounding soil.
- EP-A-1 302 414 It is also known to EP-A-1 302 414 , using a turntable on which the container is arranged or a rotating crane to rotate the container about a vertical axis to clean more effectively each outer wall. Such solutions involve expensive and difficult to implement mechanical devices.
- WO-2006/099680 discloses a bin cleaning machine according to the preamble of claim 1 comprising a central nozzle and an arm equipped with a nozzle and movable in rotation around the outer surface of a bin placed on the central nozzle.
- the invention intends to remedy by proposing a new facility for cleaning waste containers using a cleaning technique that is more efficient and simpler to implement than the techniques known from the prior art.
- the invention relates to a waste container cleaning installation according to claim 1.
- the cleaning of the outer surfaces of the containers is facilitated and requires little labor due to the possibility of rotation of the robotic arm around the container.
- the installation I represented on the Figures 1 to 4 is intended to be transported on a truck C.
- the installation I When the installation I is brought to a site where waste containers 2 are to be cleaned, the installation I can be left on the spot, after being lowered from the truck C by means of a G-crane whose truck C is equipped, articulated at the rear of the cabin of the truck C.
- the installation I is in the form of a bucket comprising a frame 4 defining a horizontal plane P4.
- the installation I defines a longitudinal axis X-X 'parallel to the plane P4.
- the longitudinal axis XX ' connects a front part of the installation, which comprises a hooking zone 3, and a rear end 5.
- the hooking zone 3 makes it possible to receive a hook or a hooking member of the truck C in order to hoist the installation I on a platform C1 of the truck C during the transport of the installation I.
- the installation On a lower face 41 of the bottom 4, the installation comprises two wheels 42 visible to the figures 3 and 4 .
- the wheels 42 facilitate the lifting of the installation I and also its possible movements over short distances.
- the installation I comprises a cleaning compartment 6, in which the waste containers 2 are cleaned.
- the cleaning compartment 6 is located in the rear end 5.
- the cleaning compartment 6 comprises, in its lower part, a sewage tank 62 of generally rectangular shape, adapted to collect the water from the cleaning of the waste containers.
- the sewage tank 62 allows significant water savings and avoids soil contamination compared to known materials in which water splashes fall directly on the road or surrounding soil, causing waste and pollution.
- the sewage tank 62 makes it possible to recover the wastewater at the end of the cleaning mission in order to recycle it in a treatment plant.
- the central nozzle 66 for projecting high pressure water jets.
- the central nozzle 66 extends along an axis X66 parallel to the axis ZZ 'and is rotatable about itself about the axis X66 relative to the cleaning compartment 6.
- the central nozzle 66 is intended to clean, by a rotary movement R1, an internal surface 22 of the waste containers 2 when they are put in place in the cleaning compartment 6.
- the central nozzle 66 is also movable in translation T1 along the axis X66, thereby cleaning, by successive passes, the entire height of the inner surface 22 of the container 2, which is arranged in the compartment 6 so as to cover the central nozzle 66.
- the cleaning compartment 6 also comprises a robotic arm 68, which is articulated in rotation around the axis X66.
- the robotic arm 68 has a horizontal portion 681, one end 681A is articulated around the central nozzle 66.
- the horizontal portion 681 is substantially parallel to the plane P4 and extends along a longitudinal axis X681.
- the horizontal portion 681 is extended by a vertical portion 683 which is substantially parallel to the axis ZZ 'and the axis X66.
- the vertical portion 683 extends along a longitudinal axis X683 from the horizontal portion 681 towards an upper portion of the cleaning compartment 6, opposite the wastewater tank 62.
- the vertical portion 683 of the robotic arm 68 is extended by an oblique portion 685 whose longitudinal axis X685 forms an angle ⁇ 1 variable with the vertical portion 683.
- the oblique portion 685 is inclined relative to the vertical portion 683 so that the X685 axis intersects the X66 axis above the central nozzle 66.
- the robotic arm 68 is adapted to clean a lateral outer surface 24 and an upper outer surface 26 of the container 2 by means of a nozzle 683A provided on the vertical portion 683 facing the central nozzle 66, and a nozzle 685A provided on a portion of the oblique portion 685 facing the central nozzle 66.
- the nozzles 683A and 685A are adapted to project water under high pressure on the external surfaces 24 and 26, as well as products such as cleaning or disinfecting liquids.
- the rotational mobility of the robotic arm 68 around the axis X66 represented by the double arrow R2 makes it possible to clean, by a movement rotating around the waste containers 2, the entire circumference of the external lateral surface 24 of the waste containers. 2.
- the containers 2 are held in the compartment 6, above the horizontal part 681, by the crane G.
- the crane G comprises for this purpose a hook G1 adapted to support the containers 2 by means of a hooking system, such as a ring 26a, visible on the figures 1 and 3 provided on the upper outer surface 26.
- the robotic arm 68 has several possibilities of additional displacements.
- the horizontal portion 681 includes in particular a first section 681 B, located on the side of the central nozzle 66 and a second section 681C located on the side of the vertical portion 683.
- the second section 681C is movable relative to the first section 681 B in translation T2 along the longitudinal axis X681.
- the relative mobility in translation of sections 681 B and 681C is obtained by means not shown, such as slides or telescopic forms. This mobility in translation makes it possible to adapt to different widths of waste containers and to different forms of containers, in particular cubic, parallelepipedal or cylindrical.
- the vertical portion 683 also has a first section 683B located on the side of the horizontal portion 681 and a second section 683C located on the side of the oblique portion 685.
- the second section 683C is translationally movable T3 with respect to the first section 683B according to the X683 axis. This allows the robot arm 68 to adapt to different heights of waste containers D2 and also to clean, by vertical movements along the axis X683, by successive passes, the entire height of the waste containers 2.
- the mobility in relative translation of sections 683B and 683C is obtained by means not shown, such as slides or telescopic forms.
- the oblique portion 685 is mounted on the vertical portion 683 so as to be pivotable with respect to the vertical portion 683 along an axis of rotation XR perpendicular to the axes X683 and X685.
- This rotational mobility R3 of the oblique part 685 makes it possible to clean an upper external surface 26 of the containers 2 efficiently, thanks to the nozzle 685A provided on the oblique part 685.
- the translation movements of the horizontal portion 681, the vertical portion 683 and the rotational movement of the oblique portion 685 are advantageously effected by means of actuators, not shown, such as hydraulic or electric cylinders.
- the robotic arm 68 can clean the external surfaces 24 and 26 of a container 2 whose dimensions exceed the dimensions of the cleaning compartment 6.
- the installation I comprises a control panel 8 comprising means for controlling the operation of the installation I.
- the control panel 8 notably comprises means for controlling the projection of water, the projection of cleaning product and manual control means of the robotic arm 68, including for example a joystick.
- the installation I is equipped with anti-projection curtains 10 and 11, provided on two sides of the installation I and adapted to be deployed around the cleaning compartment 6 when the cleaning of a container 2 is in progress.
- the anti-splash curtains 10 and 11 are preferably micro perforated plastic cloth adapted to prevent water fog from spreading around.
- the anti-projection curtains 10 and 11 are mounted with the possibility of translation along axes parallel to the axis X-X '.
- the installation I may also comprise anti-projection curtains horizontally deployable above the cleaning compartment 6 and vertically above the control console 8.
- the installation I also comprises a tank of clean water 13 provided in the vicinity of the cleaning compartment 6 and a technical center 14.
- the tank of clean water 13 can be filled by connecting it to a fire hydrant accessible on the track public.
- the tanks of clean water and wastewater are dimensioned so as to require the least possible operations of filling and emptying, in order to limit displacements.
- the technical unit 14 comprises in particular means for pressurizing and heating the water and an energy plant for supplying energy to the various components of the installation I, in particular the central nozzle 66 and the robotic arm 68.
- the control panel 8 allows, by its position at the rear end 5, an operator to stand outside the installation I, for example on a sidewalk to monitor the immediate environment of the installation I and to avoid any possible risk related to the operation of the installation I.
- the operator may have available remote control means, for example by radio with a remote control, movements of the robotic arm 68, which makes it possible to control the cleaning of the containers 2 with more precision.
- the operation of the installation I can also be automated, by means of proximity sensors of the external surfaces 24 and 26 of the container 2.
- the robotic arm 68 comprises, for this purpose, a first proximity detector 683D provided on the vertical portion 683. and for detecting how far from the outer lateral surface 24 the vertical portion 683 is. According to this measurement, automated control means of the robotic arm 68 make it possible to maneuver the second section 681C of the horizontal part 681 so as to bring the vertical part 683 closer to or away from the external surface 24, which improves the cleaning of the container 2.
- the oblique portion 685 also includes a proximity detector 685B for detecting the distance between the oblique portion 685 and the upper outer surface 26 of the container.
- the second section 683C of the vertical portions 683 and the oblique portion 685 can be controlled by automatic control means to move away from or approach the upper surface 24 of the container 2, so as to optimize cleaning the container 2.
- the technical unit 14 comprises for this purpose a control unit 141 which receives electrical signals S683D and S685B, representative of the position of the robotic arm 68 with respect to the outer surface 24 or to the upper surface 26, of the detectors 683D and 685B. With the aid of a suitable calculation algorithm, the control unit 141 sends motion instructions S141 to the actuators controlling the robotized arm portions 68, so as to perform the movements adapted to position the cleaning nozzles 683A and 685A. closer to the outer surfaces 24 and 26, in order to optimize cleaning.
- the installation I is equipped with an autonomous power source, preferably electrical energy by a generator, and does not need to be connected to, for example, a PTO of the truck C. This allows it autonomous operation and allows the use of the truck C to other tasks when the installation I is set up in a specific place.
- an autonomous power source preferably electrical energy by a generator
- the installation I comprises, on its upper part above the tank of clean water 13 and the technical room 14, waste bins 16.
- the waste bins 16 are provided along longitudinal edges of the installation I, on either side of a central space 18.
- the central space 18 can be used to receive in the folded position the crane G.
- the crane G is advantageously operated by means of the control panel 8, or with the aid of a remote control that the operator carries with him.
- the axes of rotation of the robotic arm 68 and the central nozzle 66 coincide in the X66 axis. According to a variant not shown, these two axes of rotation can be distinct while being parallel.
Description
- La présente invention concerne une installation de nettoyage de conteneurs à déchets.
- Pour le stockage des déchets ménagers, il est connu d'utiliser des conteneurs à déchets non déplaçables en surface ou enterrés et centralisés dans des emplacements déterminés. Ces conteneurs à déchets présentent généralement une cuve de stockage de déchets située sous le niveau de la chaussée ou du trottoir et une partie externe comprenant des ouvertures par lesquelles des personnes peuvent jeter leurs déchets.
- Lorsque les conteneurs à déchets sont vidés, ils doivent être nettoyés sur place. Pour un tel nettoyage, il est connu d'intégrer dans des remorques déplaçables par camion des installations de nettoyage de conteneurs à déchets. De telles installations sont équipées d'un compartiment de nettoyage comprenant notamment une buse centrale de projection de jets d'eau sous haute pression adaptée pour nettoyer la surface intérieure du conteneur, de cuves d'eau propre et d'eaux usées, d'une centrale technique et d'une passerelle de commande. Les conteneurs à nettoyer sont levés au moyen d'une grue et descendus dans le compartiment de nettoyage, en position verticale supportée par la grue. Le fond des conteneurs enterrés est ouvert afin que la buse centrale de protection soit recouverte par le conteneur, ce qui permet de nettoyer les surfaces intérieures du conteneur. L'extérieur du conteneur est généralement nettoyé par un opérateur muni d'une lance d'arrosage à haute pression et positionné sur la passerelle de commande, tandis que le conteneur est levé au dessus de l'installation au moyen de la grue. Un tel processus nécessite de la main d'oeuvre pour réaliser le nettoyage et piloter la grue et n'est pas satisfaisant pour des raisons environnementales, les eaux de nettoyage s'écoulant dans les sols environnants.
- Il est connu de mettre en oeuvre des jets d'eau à haute pression sur des parois latérales internes du compartiment, ou des brosses de nettoyage rotatives. Les jets d'eau sont fixes, ce qui fait que le nettoyage est peu efficace. Les brosses de nettoyage ne permettent pas de s'adapter à des types variés de conteneurs à déchets et s'usent rapidement.
- Il est également connu de
EP-A-1 302 414 , d'utiliser un plateau tournant sur lequel le conteneur est disposé ou une grue tournante permettant de faire tourner le conteneur autour d'un axe vertical afin d'en nettoyer plus efficacement chaque paroi externe. De telles solutions impliquent des dispositifs mécaniques coûteux et difficiles à mettre en oeuvre. -
WO-A-2006/099680 décrit une machine de nettoyage de poubelles selon le préambule de la revendication 1 comprenant une buse centrale et un bras équipé d'une buse et mobile en rotation utour de la surface externe d'une poubelle mise en place sur la buse centrale. - C'est à ces inconvénients qu'entend remédier l'invention en proposant une nouvelle installation de nettoyage de conteneurs à déchets utilisant une technique de nettoyage plus performante et plus simple à mettre en oeuvre que les techniques connues de l'art antérieur.
- A cet effet, l'invention concerne une installation de nettoyage de conteneurs à déchets selon la revendication 1.
- Grâce à l'invention, le nettoyage des surfaces extérieures des conteneurs est facilité et requiert peu de main d'oeuvre grâce à la possibilité de rotation du bras robotisé autour du conteneur.
- Selon des caractéristiques avantageuses mais non obligatoires de l'invention, une telle installation de nettoyage de conteneurs à déchets peut incorporer une ou plusieurs des caractéristiques suivantes, prise dans toute combinaison techniquement admissible :
- La partie oblique est mobile en rotation par rapport à la partie verticale, selon un axe perpendiculaire aux axes longitudinaux respectifs des parties verticale et oblique.
- L'installation comprend un pupitre de commande situé à une extrémité arrière de l'installation, au voisinage du compartiment de nettoyage.
- Le pupitre de commande comprend des moyens de contrôle manuels du bras robotisé.
- Le bras robotisé comprend des détecteurs de proximité de la surface externe du conteneur, et des moyens de pilotage automatique du bras robotisé en fonction de signaux représentatifs de la position du bras robotisé par rapport à la surface externe du conteneur transmis par les détecteurs de proximité.
- L'installation est équipée d'une source d'énergie autonome.
- L'installation comprend une cuve de récupération d'eaux usées.
- L'invention sera mieux comprise et d'autres avantages de celle-ci apparaîtront plus clairement à la lumière de la description qui va suivre d'une installation de nettoyage de conteneurs à déchets conforme à son principe, faite à titre d'exemple non limitatif et en référence aux dessins annexés dans lesquels :
- la
figure 1 est une vue en perspective d'une installation conforme à l'invention, montée sur un camion de transport, un conteneur étant installé dans un compartiment de nettoyage ; - la
figure 2 est une vue en perspective, sous un autre angle, de l'installation et du conteneur de lafigure 1 ; - la
figure 3 est une vue de côté selon la flèche III, à lafigure 2 , de l'installation desfigures 1 et 2 , le conteneur étant représenté en coupe selon un plan III-III ; - la
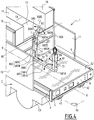
figure 4 est une vue à plus grande échelle du détail IV à lafigure 2 , le conteneur étant omis. - L'installation I représentée sur les
figures 1 à 4 est destinée à être transportée sur un camion C. Lorsque l'installation I est apportée sur un site où des conteneurs à déchets 2 doivent être nettoyés, l'installation I peut être laissée sur place, après avoir été descendue du camion C au moyen d'une grue G dont le camion C est équipé, articulée à l'arrière de la cabine du camion C. - L'installation I se présente sous la forme d'une benne comprenant un châssis 4 définissant un plan horizontal P4. L'installation I définit un axe longitudinal X-X' parallèle au plan P4. L'axe longitudinal X-X' relie une partie avant de l'installation, qui comporte une zone d'accrochage 3, et une extrémité arrière 5. La zone d'accrochage 3 permet de recevoir un crochet ou un organe d'accrochage du camion C afin de hisser l'installation I sur une plateforme C1 du camion C lors du transport de l'installation I.
- Sur une face inférieure 41 du fond 4, l'installation comprend deux roulettes 42 visibles aux
figures 3 et4 . Les roulettes 42 facilitent le levage de l'installation I et également ses déplacements éventuels sur de courtes distances. - On définit également un axe Z-Z' vertical et perpendiculaire au plan P4.
- L'installation I comporte un compartiment de nettoyage 6, dans lequel les conteneurs à déchets 2 sont nettoyés. Le compartiment de nettoyage 6 se situe à l'extrémité arrière 5. Le compartiment de nettoyage 6 comporte, dans sa partie basse, une cuve d'eaux usées 62 de forme globalement rectangulaire, adaptée pour recueillir les eaux issues du nettoyage des conteneurs à déchets. La cuve d'eaux usées 62 permet de significatives économies d'eau et évite la contamination des sols par rapport aux matériels connus dans lesquels les projections d'eau tombent directement sur la chaussée ou les sols alentours, engendrant un gaspillage et une pollution. La cuve d'eaux usées 62 permet de récupérer les eaux usées en fin de mission de nettoyage afin de les recycler dans une usine de traitement.
- Approximativement au centre du compartiment de nettoyage 6, celui-ci comporte une buse centrale 66 de projection de jets d'eau sous haute pression. La buse centrale 66 s'étend selon un axe X66 parallèle à l'axe Z-Z' et est mobile en rotation sur elle-même autour de l'axe X66 par rapport au compartiment de nettoyage 6. La buse centrale 66 est destinée à nettoyer, par un mouvement rotatif R1, une surface interne 22 des conteneurs à déchets 2 lorsque ceux-ci sont mis en place dans le compartiment de nettoyage 6.
- La buse centrale 66 est également mobile en translation T1 selon l'axe X66, ce qui permet de nettoyer, par des passes successives, toute la hauteur de la surface interne 22 du conteneur 2, qui est disposé dans le compartiment 6 de manière à recouvrir la buse centrale 66.
- Le compartiment de nettoyage 6 comporte également un bras robotisé 68, qui est articulé en rotation autour de l'axe X66. Le bras robotisé 68 comporte une partie horizontale 681, dont une extrémité 681A est articulée autour de la buse centrale 66. La partie horizontale 681 est sensiblement parallèle au plan P4 et s'étend selon un axe longitudinal X681.
- La partie horizontale 681 se prolonge par une partie verticale 683 qui est sensiblement parallèle à l'axe Z-Z' et à l'axe X66. La partie verticale 683 s'étend selon un axe longitudinal X683 à partir de la partie horizontale 681 en direction d'une partie haute du compartiment de nettoyage 6, à l'opposé de la cuve d'eaux usées 62.
- La partie verticale 683 du bras robotisé 68 est prolongée par une partie oblique 685 dont l'axe longitudinal X685 forme un angle β1 variable avec la partie verticale 683. La partie oblique 685 est inclinée par rapport à la partie verticale 683 de manière que l'axe X685 coupe l'axe X66 au dessus de la buse centrale 66.
- Le bras robotisé 68 est adapté pour nettoyer une surface extérieure latérale 24 et une surface externe supérieure 26 du conteneur 2 au moyen d'une buse 683A prévue sur la partie verticale 683 en regard de la buse centrale 66, et d'une buse 685A prévue sur une partie de la partie oblique 685 en regard de la buse centrale 66. Les buses 683A et 685A sont adaptées pour projeter de l'eau sous haute pression sur les surfaces externes 24 et 26, ainsi que des produits tels que des liquides de nettoyage ou de désinfection. La mobilité en rotation du bras robotisé 68 autour de l'axe X66, représentée par la double flèche R2, permet de nettoyer, par un mouvement tournant autour des conteneurs à déchets 2, toute la circonférence de la surface latérale externe 24 des conteneurs à déchets 2.
- Afin de permettre le mouvement de rotation R2 du bras robotisé 68, les conteneurs 2 sont maintenus dans le compartiment 6, au dessus de la partie horizontale 681, par la grue G . Comme représentée aux
figures 1 et3 , la grue G comprend à cet effet un crochet G1 adapté pour supporter les conteneurs 2 par l'intermédiaire d'un système d'accrochage, tel qu'un anneau 26a, visible sur lesfigures 1 et3 , prévu sur la surface externe supérieure 26. - Afin de s'adapter à diverses tailles et formes de conteneurs à déchets 2, le bras robotisé 68 comporte plusieurs possibilités de déplacements supplémentaires. La partie horizontale 681 comprend notamment une première section 681 B, située du côté de la buse centrale 66 et une deuxième section 681C située du côté de la partie verticale 683. La deuxième section 681C est mobile par rapport à la première section 681 B en translation T2 selon l'axe longitudinal X681. La mobilité relative en translation des sections 681 B et 681C est obtenue par des moyens non représentés, tels que des glissières ou des formes télescopiques. Cette mobilité en translation permet de s'adapter à différentes largeurs de conteneurs à déchets et ainsi qu'à différentes formes de conteneurs, notamment cubique, parallélépipédique ou cylindrique.
- La partie verticale 683 comporte également une première section 683B située du côté de la partie horizontale 681 et une seconde section 683C située du côté de la partie oblique 685. La seconde section 683C est mobile en translation T3 par rapport à la première section 683B selon l'axe X683. Ceci permet au bras robotisé 68 de s'adapter à différentes hauteurs de conteneurs à déchets D2 et également de nettoyer, par des mouvements verticaux selon l'axe X683, par des passes successives, toute la hauteur des conteneurs à déchets 2. La mobilité en translation relative des sections 683B et 683C est obtenue par des moyens non représentés, tels que des glissières ou des formes télescopiques.
- La partie oblique 685 est montée sur la partie verticale 683 de manière à pouvoir pivoter par rapport à la partie verticale 683 selon un axe de rotation XR perpendiculaire aux axes X683 et X685. Cette mobilité en rotation R3 de la partie oblique 685 permet de nettoyer une surface externe supérieure 26 des conteneurs 2 de façon efficace, grâce à la buse 685A prévue sur la partie oblique 685.
- Les mouvements de translation de la partie horizontale 681, de la partie verticale 683 et le mouvement de rotation de la partie oblique 685 sont avantageusement effectués au moyen d'actionneurs non représentés tels que des vérins hydrauliques ou électriques.
- Grâce à la mobilité en translation de la section 681C par rapport à la section 681 B, le bras robotisé 68 peut nettoyer les surfaces externes 24 et 26 d'un conteneur 2 dont les dimensions dépassent les dimensions du compartiment de nettoyage 6.
- A l'extrémité arrière 5 du compartiment de nettoyage 6, l'installation I comporte un pupitre de commande 8 comportant des moyens de contrôle du fonctionnement de l'installation I. Le pupitre de commande 8 comporte notamment des moyens de contrôle de la projection d'eau, de la projection de produit de nettoyage et des moyens de contrôle manuels du bras robotisé 68, incluant par exemple une manette.
- L'installation I est équipée de rideaux anti-projection 10 et 11, prévu sur deux côtés de l'installation I et adaptés pour être déployés autour du compartiment de nettoyage 6 lorsque le nettoyage d'un conteneur 2 est en cours. Les rideaux anti-projection 10 et 11 sont de préférence en toile de matière plastique micro perforée adaptée pour empêcher un brouillard d'eau de se propager aux alentours. Les rideaux anti-projection 10 et 11 sont montés avec possibilité de translation selon des axes parallèles à l'axe X-X'.
- Selon un mode de réalisation non représenté, l'installation I peut également comprendre des rideaux anti-projection déployables horizontalement au dessus du compartiment de nettoyage 6 et verticalement au dessus du pupitre de commande 8.
- L'installation I comporte également une cuve d'eau propre 13 prévue au voisinage du compartiment de nettoyage 6 et une centrale technique 14. La cuve d'eau propre 13 peut être remplie en la raccordant à une bouche d'incendie accessible sur la voie publique.
- En fonction des besoins, les cuves d'eau propre et d'eaux usées sont dimensionnées de manière à nécessiter le moins possible d'opérations de remplissage et de vidage, afin de limiter les déplacements.
- La centrale technique 14 comprend notamment des moyens de mise en pression et de chauffage de l'eau et une centrale énergétique permettant de fournir en énergie les divers composants de l'installation I, notamment la buse centrale 66 et le bras robotisé 68.
- Le pupitre de commande 8 permet, par sa position à l'extrémité arrière 5, à un opérateur de se tenir à l'extérieur de l'installation I, par exemple sur un trottoir afin de surveiller l'environnement immédiat de l'installation I et de parer à tout risque éventuel lié au fonctionnement de l'installation I. En outre, l'opérateur peut avoir à disposition des moyens de commande à distance, par exemple par radio avec une télécommande, des déplacements du bras robotisé 68, ce qui permet de piloter le nettoyage des conteneurs 2 avec plus de précision.
- Le fonctionnement de l'installation I peut également être automatisé, au moyen de détecteurs de proximité des surfaces externes 24 et 26 du conteneur 2. Le bras robotisé 68 comprend, à cet effet, un premier détecteur de proximité 683D prévu sur la partie verticale 683 et permettant de détecter à quelle distance de la surface latérale externe 24 la partie verticale 683 se trouve. En fonction de cette mesure, des moyens automatisés de contrôle du bras robotisé 68 permettent de manoeuvrer la deuxième section 681C de la partie horizontale 681 de manière à rapprocher ou éloigner la partie verticale 683 de la surface externe 24, ce qui améliore le nettoyage du conteneur 2.
- La partie oblique 685 comporte également un détecteur de proximité 685B permettant de détecter la distance entre la partie oblique 685 et la surface externe supérieure 26 du conteneur. En fonction de cette mesure, la deuxième section 683C des parties verticales 683 et la partie oblique 685 peuvent être pilotées par des moyens de contrôles automatiques afin de s'éloigner ou de se rapprocher de la surface supérieure 24 du conteneur 2, de manière à optimiser le nettoyage du conteneur 2.
- La centrale technique 14 comporte à cet effet une unité de pilotage 141 qui reçoit des signaux électriques S683D et S685B, représentatifs de la position du bras robotisé 68 par rapport à la surface externe 24 ou à la surface supérieure 26, des détecteurs 683D et 685B. A l'aide d'un algorithme de calcul adapté, l'unité de pilotage 141 envoie des consignes de mouvements S141 aux actionneurs pilotant les parties du bras robotisé 68, de manière à effectuer les mouvements adaptés pour positionner les buses de nettoyage 683A et 685A au plus près des surfaces externes 24 et 26, afin d'en optimiser le nettoyage.
- L'installation I est équipée d'une source d'énergie autonome, de préférence d'énergie électrique par un groupe électrogène, et ne nécessite pas d'être raccordée à, par exemple, une prise de force du camion C. Cela lui permet un fonctionnement autonome et autorise une utilisation du camion C à d'autres tâches lorsque l'installation I est mise en place dans un lieu précis.
- Selon un aspect optionnel de l'invention, l'installation I comporte, sur sa partie supérieure au dessus de la cuve d'eau propre 13 et du local technique 14, des bacs à déchets 16. Les bacs à déchets 16 sont prévus le long de bords longitudinaux de l'installation I, de part et d'autre d'un espace central 18.
- L'espace central 18 peut être utilisé pour recevoir en position repliée la grue G. La grue G est avantageusement manoeuvrée au moyen du pupitre de commande 8, ou à l'aide d'une télécommande que l'opérateur emporte avec lui.
- Dans l'exemple représenté, les axes de rotation du bras robotisé 68 et de la buse centrale 66 sont confondus dans l'axe X66. Selon une variante non représentée, ces deux axes de rotation peuvent être distincts tout en étant parallèles.
Claims (6)
- Installation (I) de nettoyage de conteneurs (2) à déchets, comprenant :- un châssis définissant un plan horizontal (P4),- un compartiment de nettoyage (6), équipé d'une buse centrale (66) de projection de jets d'eau sous haute pression, mobile en rotation (R1) sur elle-même autour d'un axe longitudinal (X66) et adaptée pour nettoyer une surface intérieure (22) d'un conteneur (2) disposé dans le compartiment de nettoyage (6) de manière à recouvrir la buse centrale (66),- un bras robotisé (68) mobile en rotation (R2) autour d'un axe de rotation (X66) parallèle à la buse centrale (66), ce bras (68) comportant au moins une buse (683A, 685A) de projection d'eau sous haute pression adaptée pour nettoyer une surface extérieure (24, 26) du conteneur (2), le bras robotisé (68) comportant une partie verticale (683) par rapport à un plan horizontal (P4) du compartiment de nettoyage (6) et munie d'au moins une buse (683A) de projection d'eau sous haute pression, et l'installation étant caractérisée en ce que le bras robotisé comprend une partie oblique (685) prolongeant la partie verticale (683) à l'opposé d'un châssis (4) de l'installation (I), cette partie oblique (685) comprenant au moins une buse (685A) de projection d'eau sous haute pression adaptée pour nettoyer une surface externe supérieure (26) du conteneur (2), en ce que la partie verticale (683) comprend deux sections (683B, 683C) mobiles en translation (T3) l'une par rapport à l'autre selon un axe longitudinal (X683) de la partie verticale (683), en ce que le bras robotisé (68) comprend une partie horizontale (681) par rapport à un châssis (4) de l'installation (I), cette partie horizontale (681) comprenant deux sections (681 B, 681 C) mobiles en translation (T2) l'une par rapport à l'autre selon un axe longitudinal (X681) de la partie horizontale (681), et en ce que le bras robotisé (68) comprend des détecteurs de proximité (683D, 685B) de la surface externe (24, 26) du conteneur (2), et des moyens (141) de pilotage (S141) automatique du bras robotisé (68) en fonction de signaux (S683D, S685B) représentatifs de la position du bras robotisé (68) par rapport à la surface externe (24, 26) du conteneur (2) transmis par les détecteurs de proximité (683D, 685B).
- Installation selon la revendication 1, caractérisée en ce que la partie oblique (685) est mobile en rotation (R3) par rapport à la partie verticale (683), selon un axe (XR) perpendiculaire aux axes longitudinaux respectifs (X683, X685) des parties verticale (683) et oblique (685).
- Installation de nettoyage selon l'une des revendications précédentes, caractérisée en ce qu'elle comprend un pupitre de commande (8) situé à une extrémité arrière (5) de l'installation (I), au voisinage du compartiment de nettoyage (6).
- Installation de nettoyage selon la revendication 3, caractérisée en ce que le pupitre de commande (8) comprend des moyens de contrôle manuels du bras robotisé (68).
- Installation de nettoyage selon l'une des revendications précédentes, caractérisée en ce qu'elle est équipée d'une source d'énergie autonome.
- Installation de nettoyage selon la revendication 5, caractérisée en ce qu'elle comprend une cuve (62) de récupération d'eaux usées.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ES12356028.6T ES2624104T3 (es) | 2012-12-10 | 2012-12-10 | Instalación de limpieza de contenedores de desechos |
| EP12356028.6A EP2740548B1 (fr) | 2012-12-10 | 2012-12-10 | Installation de nettoyage de conteneurs à déchets |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP12356028.6A EP2740548B1 (fr) | 2012-12-10 | 2012-12-10 | Installation de nettoyage de conteneurs à déchets |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2740548A1 EP2740548A1 (fr) | 2014-06-11 |
| EP2740548B1 true EP2740548B1 (fr) | 2017-03-29 |
Family
ID=47563141
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP12356028.6A Not-in-force EP2740548B1 (fr) | 2012-12-10 | 2012-12-10 | Installation de nettoyage de conteneurs à déchets |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2740548B1 (fr) |
| ES (1) | ES2624104T3 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106733987A (zh) * | 2017-01-17 | 2017-05-31 | 谢锦宸 | 一种用于环保垃圾桶的分拆清洗装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4314729A1 (de) * | 1993-05-04 | 1994-11-10 | Franz Josef Dipl In Schweitzer | Verfahren und Vorrichtung zum Reinigen der äußeren Oberfläche von (Wertstoff-)Sammelbehältern |
| ES2164023B1 (es) | 2000-06-08 | 2003-05-01 | Pueyo Pedro Jose Ocana | Vehiculo mixto para la recogida de residuos y lavado de contenedores tipo igloo. |
| WO2006099680A1 (fr) * | 2005-03-24 | 2006-09-28 | Genetech Pty Ltd | Appareil de nettoyage de poubelle |
-
2012
- 2012-12-10 ES ES12356028.6T patent/ES2624104T3/es active Active
- 2012-12-10 EP EP12356028.6A patent/EP2740548B1/fr not_active Not-in-force
Non-Patent Citations (1)
| Title |
|---|
| None * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106733987A (zh) * | 2017-01-17 | 2017-05-31 | 谢锦宸 | 一种用于环保垃圾桶的分拆清洗装置 |
| CN106733987B (zh) * | 2017-01-17 | 2018-01-05 | 谢锦宸 | 一种用于环保垃圾桶的分拆清洗装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2740548A1 (fr) | 2014-06-11 |
| ES2624104T3 (es) | 2017-07-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| FR2939337A1 (fr) | Procede de nettoyage automatique d'un contenant, dispositif pour sa mise en oeuvre, et application. | |
| EP0980721B1 (fr) | Dispositif mobile pour le nettoyage d'ouvrages de transport de fluides, notamment d'égouts | |
| KR20130011279A (ko) | 관로 청소용 로봇 | |
| EP1517033A1 (fr) | Dispositif pour le nettoyage des pales d'éolienne | |
| CA2906041C (fr) | Procedes de nettoyage de toit et systemes associes | |
| EP2740548B1 (fr) | Installation de nettoyage de conteneurs à déchets | |
| EP0559541B1 (fr) | Installation pour le nettoyage de récipients tels que poubelles | |
| FR2973096A1 (fr) | Systeme d'entretien de la paroi interieure d'une conduite et procede de mise en œuvre | |
| FR3079593A1 (fr) | Robot autonome a treuils motorises embarques, notamment destine a renover l’exterieur d’une conduite forcee | |
| EP2110297B1 (fr) | Procédé de retournement d'une structure et outillage associé à un tel procédé | |
| EP2684848B1 (fr) | Installation de lavage et de recyclage d'eau chargee de gravats | |
| EP3025796B1 (fr) | Tour de lavage pour bennes à béton, comprenant des patins de centrage des faces inclinées de ces bennes | |
| EP2711317B1 (fr) | Appareil de chargement et de mise à niveau d'un matériau dans un récipient | |
| CN206844298U (zh) | 一种设置有可翻转吸污管卷盘的联合吸污车 | |
| EP0069660B1 (fr) | Véhicule de lavage de conteneurs, notamment de conteneurs pour la collecte mecanisée d'ordures ménageres | |
| EP2101005B1 (fr) | Machine de curage et procédé de curage | |
| FR2936422A1 (fr) | Dispositif de table de lavage et de decontamination | |
| DK2920371T3 (en) | Surface cleaning device | |
| FR2913895A1 (fr) | Bac de decantation pour benne a beton | |
| EP1911643A1 (fr) | Dispositif mobile de lavage ou de désinfection de véhicules terrestres | |
| FR2962927A1 (fr) | Robot de nettoyage de cuve de stockage de produits liquides, notamment de carburants et procede de nettoyage mettant en oeuvre ce robot. | |
| FR2932465A1 (fr) | Dispositif de plate-forme d'accueil pour le vidage et le lavage des vehicules de nettoiement des chaussees | |
| KR102450794B1 (ko) | 레이저를 이용한 활주로 제설시스템 | |
| FR2585303A1 (fr) | Vehicule de lavage de conteneurs, notamment de conteneurs pour la collecte mecanisee d'ordures menageres | |
| CN212172247U (zh) | 一种建筑垃圾装载装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20121210 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| R17P | Request for examination filed (corrected) |
Effective date: 20141208 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20161020 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 879243 Country of ref document: AT Kind code of ref document: T Effective date: 20170415 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: ARNOLD AND SIEDSMA AG, CH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602012030418 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2624104 Country of ref document: ES Kind code of ref document: T3 Effective date: 20170713 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170630 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170629 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 879243 Country of ref document: AT Kind code of ref document: T Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170629 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170729 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170731 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602012030418 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20180103 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20171210 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171210 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20171231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171210 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171210 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171231 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20181211 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20181211 Year of fee payment: 7 Ref country code: CH Payment date: 20181219 Year of fee payment: 7 Ref country code: FR Payment date: 20181031 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20190125 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20121210 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602012030418 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170329 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200701 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191210 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191231 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191231 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191231 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20210601 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20191211 |