EP2653429B1 - Steuerungsverfahren für Flurförderzeug sowie Flurförderzeug - Google Patents
Steuerungsverfahren für Flurförderzeug sowie Flurförderzeug Download PDFInfo
- Publication number
- EP2653429B1 EP2653429B1 EP20130162430 EP13162430A EP2653429B1 EP 2653429 B1 EP2653429 B1 EP 2653429B1 EP 20130162430 EP20130162430 EP 20130162430 EP 13162430 A EP13162430 A EP 13162430A EP 2653429 B1 EP2653429 B1 EP 2653429B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- load
- control method
- pickup means
- functions
- industrial truck
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/20—Means for actuating or controlling masts, platforms, or forks
- B66F9/24—Electrical devices or systems
Definitions
- the invention relates to a control method for an industrial truck with at least one camera, a monitor and a control device aligned with the area of a lifting device, wherein in the control method, when the truck with the load handling device is in front of a load to be picked up, the steps detect the load by means of image processing methods by the control device, such as pattern or object detection, locating a load transfer device of the load by the control device, determining the relative position of the load transport device to the load receiving means and the relative position of the receiving elements of the load transport device, which are provided for the load handling means of the truck by the control device be performed.
- image processing methods such as pattern or object detection
- Forklift trucks and reach trucks are used in addition to pallet trucks to a very large extent as industrial trucks, these types of industrial trucks mainly transporting loads arranged on pallets.
- two forks are usually arranged to form a fork on a fork carriage with which in the recording of a load by appropriate maneuvering of the forklift and driving a mast on which the fork is guided vertically movable, associated receiving openings of a pallet can be controlled.
- unfavorable visibility conditions such as at very high lifted fork or in poorly lit areas of a warehouse, this can be tedious or at least require considerable time, as must be particularly slow and carefully controlled.
- the handling capacity and the efficient use of industrial trucks are also impaired by the fact that drivers or operators of industrial trucks may not yet have sufficient training in the operation and in the control of the truck.
- the load-receiving device and optionally located in front of or on the load-receiving device transport with load, such as a loaded pallet, and at the same time on a monitor.
- load such as a loaded pallet
- monitor can also map the environment of the truck while driving very general and represent.
- Primary fields of application here are load-bearing at high lifting heights and driving in restricted visibility conditions, especially reverse driving and driving forward in the event of visual obstruction due to the load being picked up.
- Driverless transport systems are also known in which image data obtained by a camera are used to generate control commands to the vehicle control system.
- Optical sensors are now available in very compact dimensions and cost just as miniaturized cameras, z. B. for widespread use in mobile phones. Also, by using a plurality of optical sensors within a housing, the imaging range can be increased or three-dimensional data can be obtained by combining the sensor data of the individual sensors. In addition, image-sensor combinations are available in the field of the video entertainment industry. In addition to imaging camera sensors, they can use correlated depth-measuring sensor systems to provide three-dimensional image data.
- From the DE 10 2008 027 701 A1 is a control method for an autonomous, fully automatic truck with a laser sensor in the area of the lifting device known. From data of the sensor, the relative position of a load to be absorbed relative to a load-receiving means can be determined by a control device and subsequently the desired orientation of the load-receiving means for receiving the load can be calculated. The actual orientation of the load receiving means is fully automatically corrected by the control device.
- the EP0800129A1 discloses an industrial truck, which is designed to be either manually or automatically operable.
- the control system is designed to automatically manage the movements of pallets.
- the present invention has for its object to provide a control method for an industrial truck and an associated truck available with the ease of use for inexperienced with the operation people and with the handling capacity of the truck can be increased.
- the handling performance and the efficient use of industrial trucks can be increased if an operator is still relatively inexperienced in the operation of the truck.
- Especially the reliable and safe picking up of a load without damaging the load or other objects in the vicinity requires some practice and can only be carried out with greater speed after some routine. This is especially true when the load is, for example, in a high rack in a higher storage position.
- the load is, for example, in a high rack in a higher storage position.
- control commands of the truck operator such as a reach truck or even a counterbalance forklift or Gabelhochhubwagens, in a different manner, as in a position close to the ground.
- vibrations and delays can occur due to the elasticity of a lifting mast.
- control device has determined a sequence of control commands of the functions of the lifting device and optionally of driving the truck to the load receiving means, such as a fork with the forks, in the receiving elements of a load handling device for the load, such as a pallet with the provided for the forks openings To move, these recording elements on the monitor, but alternatively also on another suitable, possibly already existing display device of the truck, marked marked.
- the automatic control of the functions or driving movement takes place only after the control device receives a signal that a confirmation input has been made by the driver.
- Such a confirmation input may be a dedicated switch, a button on the touch-sensitive monitor, or any other suitable operator-aware input.
- the control device performs those necessary movements to move the load receiving means in the receiving elements, which can be made as movements of the control device automatically.
- the functions of a lifting device by working hydraulics the valves are usually carried out as electrically actuated control valves, with manually performed operating inputs via controls that emit an electrical signal. This allows a fully automatic control by the control device in the method according to the invention, which is inexpensive to implement.
- the values to be set for the operating element are displayed by a graphical display on the monitor, but also optionally in another alternative display option.
- This can be, for example, turns of a steering wheel, but also an arrow-controlled display which specifies in which direction a control element is to be actuated until the value to be set is reached.
- this is also possible for operating lever for a lifting height, a side thrust, a mast thrust, a tilt of the lifting device or a mast tilt.
- functions that could be controlled fully automatically by the control device are operated in this way.
- a human control both in terms of the correct determination of an intended automated movement sequence and during the automated movement sequence of the truck. Therefore, safety requirements can be met more easily and a required greater effort as in autonomous industrial trucks can be avoided.
- the method is also inexpensive to implement insofar as already exists for a variety of functions of the load-handling device as well as the driving functions of the truck automatic control and for the remaining required functions such is not required.
- control of a brake pedal and an accelerator pedal may remain under human control alone.
- the load transport device is a pallet and the receiving elements openings for forks of a fork as a load-receiving element.
- the edges of the load and / or the edges of the load transport device are detected by the control device.
- the load transport device can be found in an image pattern, which must be located at the lower end of these edges.
- the load can also be completely enclosed by the load transport device, as in the case of a mesh basket, in which the load transport device is already detected by the detection of the load, as a rule.
- one or more further confirmation inputs before or between the activation of individual functions of the lifting device and / or the Control of individual driving functions of the truck are queried.
- the automated control of individual functions of the load handling device and / or individual driving functions of the truck can be done simultaneously, but also for time optimization simultaneously. Moreover, at the same time the control of those functions by the operator can take place, which can not be controlled automatically. It can be provided that further confirmation inputs must be made in the same manner described above, in order to meet safety requirements, for example, if in a certain automated movements increased monitoring by the operator should be ensured.
- a continuous confirmation input is interrogated and, in the absence of a confirmation signal, the control of the functions of the load receiving means and / or the driving functions of the truck is stopped.
- a confirmation input can also be provided by the fact that a corresponding signal must be given constantly and when a "release” all automated movements are stopped.
- the lifting device may be guided vertically movable on a mast and functions of the lifting device may be the lifting height and / or a slope and / or a mast thrust of the mast.
- the inventive method is particularly advantageous when loads must be taken even at high altitudes, as it can cause vibrations and elastic deformation of the mast at high lifting heights, which can complicate the operation in addition. In particular, however, the visibility at high lift are unfavorable.
- the inventive method supports as an assistance system an operator in contrast, for example, to a pure camera system according to the prior art in the operation and thus avoids the problems that can occur when an operator only on the basis of a camera image movements of Lifting means must control.
- One function of the load handling device may be a side thruster.
- the load-carrying means is a fork and a function of the load-carrying means a fork tine adjustment.
- a quick lateral alignment of the forks and rapid adjustment of the distance between the forks will be beneficial to the handling capacity of the truck.
- the display of values to be set for functions of the load-handling device and for driving functions of the truck on the monitor takes place continuously until the load-receiving means is located in the receiving elements.
- a value range of a required steering angle is displayed for the steering angle as the driving function of the truck as the value to be set, as well as the actual value of the steering angle.
- the inventive method does not require autonomous steering with the appropriate requirements for safety and reliability.
- the load-carrying means may be a fork and be displayed on the monitor, the way the forks in the receiving elements of the load transport device.
- Such a representation allows an intuitive check by the operator as to whether there is a risk of collisions.
- a warning tone and / or the further control of the functions of the load-handling device and / or the driving functions of the truck is stopped.
- optical sensors for the detection of the load, which are connected to the control device.
- optical sensors By further optical sensors, the accuracy of detection can be improved.
- Such optical sensors are available as CMOS image sensors but also as miniaturized cameras inexpensively as mass products.
- the further optical sensors can preferably, in addition to the already mentioned image information, for example encoded in brightness and color values of the pixels, acquire further information, such as distance information in the form of point clouds.
- a stereo image can be obtained in general by two cameras, from which information about the distance of the individual pixels can be obtained.
- the camera can be a Time Of Flight camera.
- the camera is a stereo camera.
- a stereo camera can be very compact in a camera win a double image, from which a distance information can be calculated.
- the camera is arranged on a fork carrier of the load-receiving means, in particular arranged so as to be movable in height, and can be moved to a position below the load-carrying means.
- the camera on a vertical rail behind the load bearing device preferably designed as a load fork on the fork carriage in height be arranged so that it can be moved at a load lying on the load fork down until the camera is a field of vision under the forks Reached fork. It is also possible to generally move the camera in this lower position for the image recording in the inventive method.
- movable cameras that can not be moved vertically but horizontally.
- the monitor can be a touch screen.
- the inventive method is also applicable when a load handling device carries no load, such as when a single empty pallet is picked up without load. In such a case, the image processing must be adjusted accordingly so that the pattern of an empty load transporting device without load is recognized.
- the method according to the invention can also be modified insofar as there is no search for an actual load.
- an industrial truck having at least one camera, a monitor and a control device, which is aligned with the region of a load-receiving device and in which the control device carries out a method described above.
- the truck has the advantages already described above.
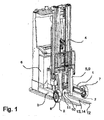
- a truck is shown in perspective view, in which the control method according to the invention is used.
- the truck is a reach truck with a first Radarm 1 with a roller 2 and a second Radarm 3, also with a roller 2.
- the inventive method is at any time in any other type of truck and especially forklift, such as a Counterbalance forklift, or about a Gabelhochhubwagen used.
- the control method according to the invention can also be used in industrial trucks that have no mast.
- a fork carriage 11 is arranged on a lifting mast 4, to which a load fork 5 is attached as a load-receiving means 9. Behind the mast 4, a battery 6 is arranged.
- the load carrier 5 carrying fork carriage 11 is raised and lowered on the mast 4 by means of a lifting drive.
- the mast 4 can be moved forward between the wheel arms 1, 3 to receive a load.
- a first fender 7 and the roller 2 of the second Radarms 3 also a second fender 8.
- a camera 10 is arranged at the fork carriage 11.
- the camera 10 is arranged in the vehicle transverse direction in the central region of the fork carriage 11.
- the camera 10 is preferably arranged in height adjustable on the fork carriage 11 and can be moved to a position below the fork 5.
- a miniature camera 13 can be arranged as a further optical sensor 14 on a fork tine 12. Such miniature cameras 13 are available in robust and cost-effective design and are used for example in numerous mobile phones.
- the Fig. 2 schematically shows the truck according to the invention in view from above.
- the fork 5 Between the first Radarm 1 and the second Radarm 3 with the roller 2 of the mast 4 is arranged with the fork 5.
- the camera 10 On the fork carriage 11 with the fork 5, the camera 10 is arranged, which detects with its detection area 17 located in front of the forks 5 as a load-receiving means 9 load 15.
- a control device not shown detects from the image data of the camera 10, the relative, in the example twisted arrangement of the load 15 and pallet 16.
- the Fig. 3 shows a perspective view of the male load 15 on a pallet 16 as a load transport device 18.
- the control device searches for characteristic points on load 15 and load transport device 18, preferably vertical edges 19 of the load 15 by means of image processing methods, by means of which the respective ends of the load transport device 18 can be found , Based on these edges 19, the transport device 18 is searched at the respective lower end. Based on edges 20 of the contour of the load transport device 18, here the pallet 16, their position and relative orientation is determined. As a result, openings 21 of the pallet 16, which serve for receiving the fork tines 12 of the forks 5 and forming receiving elements 22 for the load-receiving means 9 of the industrial truck, can be found.
- the Fig. 4 shows a monitor image of a monitor 23, which is arranged in the field of view of the operator of the truck.
- On this monitor image is a section of the captured by the camera 10 representation of the load 15 with the load transport device 18 in the form of a pallet 16 from the Fig. 3 displayed.
- the arrows 21 indicate the openings 21 identified by the control device corresponding to the receiving elements 22 for the load-receiving means 9 of the industrial truck.
- An operator of the truck can now confirm the correct recognition of the openings 21 and by a confirmation input, for example by a switch not shown here or a control panel 24 of the touchscreen 25 designed as a monitor 23, the automatic control of the functions of the lifting device 9 and the driving functions of Start the truck.
- a value to be set is displayed on the monitor 23 for functions that can not be controlled automatically, in the present case the steering of the industrial truck.
- the load fork 5 aligns with the openings 21 and, when the operator observes the appropriate instructions about the values to be set, the forks 12 of the forks 5 enter the openings 21.
- This assistance function also allows operators with little experience to safely receive a load 15 together with a load transport device 18.
- the control device may be integrated in a control computer of the vehicle or consist entirely or in part from a separate computer.
- the Fig. 5 shows a schematic of the method according to the invention.
- the monitor 23 may consist of any form of image display means, e.g. B. a color screen in LCD technology.
- the functions 26 of the load-receiving means 9 are controlled by the operator in normal operation via working hydraulic control elements 27 and are usually made of hydraulic elements, which are usually automatically controlled by electrically controllable valves.
- Via a traction drive control 28 of the driving functions 29 of the truck an operator is able to control the vehicle movement.
- An image processing unit 30 forms part of a control device 31, which can detect and process the signals of one or more optical sensors 10, 14 in real time.
- An optical sensor in the present example case, the camera 10 and the optical sensor 14 in the Fig. 1
- the optical sensors 10, 14 are able to record brightness and color information by, for example, a camera chip and can, with appropriate design, also determine distances to objects by optical means.
- the functions 26 of the load receiving means 9 and the driving functions 29 of the truck are in the illustration of Fig. 5 to vehicle drives 32 summarized.
- the working hydraulic control elements 27, the traction drive control 28 and the monitor 23 are arranged in the area of a driver's workplace 33.
- the image processing unit 30 and the optical sensors 10, 14 are arranged in the region of the load-receiving means 9, here the fork carrier 11 and the fork tine 12.
- a vehicle controller 34 in the present example also forms part of the control device 31 and connects the aforementioned elements via unidirectional or bidirectional communication means.
- the image processing unit 30 can also be arranged elsewhere and / or also integrated into the vehicle control system 34, so that the vehicle control system 34 simultaneously forms the complete control device 31 of the embodiment described above.
- a signal S1 transmits an acknowledgment signal, which is generated when the operator confirms the confirmation input, as well as other selection and control signals.
- the signal S2 transmits the image of the camera 10, the quality of which can be improved by image processing algorithms of the control device 31 and which can additionally be provided with superimposed algorithmically generated additional information, e.g. B. distance information, route specifications and markings of hazardous areas.
- the signal S3 includes control signals of the working hydraulic controls 27 and the signal S4 control signals of the traction drive operation 28.
- the signal S5 is the image information signal of the camera 10 and the signal S6 is the image information signal of the optical sensor 14.
- Generated control signals of the image processing unit 30 are transmitted to the vehicle controller 34 via a signal S7.
- a signal S8 forms the control signals of the functions 26 of the load receiving means 9 and a signal S9 is used to control the driving functions 29th
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Forklifts And Lifting Vehicles (AREA)
Description
- Die Erfindung betrifft ein Steuerungsverfahren für ein Flurförderzeug mit mindestens einer auf den Bereich eines Lastaufnahmemittels ausgerichteten Kamera, einem Monitor und einer Steuerungsvorrichtung, wobei bei dem Steuerungsverfahren, wenn sich das Flurförderzeug mit dem Lastaufnahmemittel vor einer aufzunehmenden Last befindet, die Schritte Erfassen der Last mittels Bildverarbeitungsverfahren durch die Steuerungsvorrichtung, wie beispielsweise Muster- oder Objekterkennung, Suchen einer Lasttransportvorrichtung der Last durch die Steuerungsvorrichtung, Bestimmen der relativen Position der Lasttransportvorrichtung gegenüber dem Lastaufnahmemittel und der relativen Position der Aufnahmeelemente der Lasttransportvorrichtung, die für das Lastaufnahmemittel des Flurförderzeugs vorgesehen sind, durch die Steuerungsvorrichtung durchgeführt werden.
- Als Flurförderzeuge kommen neben Gabelhubwagen in sehr großem Umfang Gabelstapler und Schubmaststapler zum Einsatz, wobei diese Arten von Flurförderzeugen vor allem auf Paletten angeordnete Lasten transportieren. Dabei sind im Regelfall zur Bildung einer Lastgabel an einem Gabelträger zwei Gabelzinken angeordnet, mit denen bei dem Aufnehmen einer Last durch entsprechendes Manövrieren des Gabelstapler sowie Ansteuern eines Hubmastes, an dem die Lastgabel höhenbeweglich geführt ist, zugeordnete Aufnahmeöffnungen einer Palette angesteuert werden können. Insbesondere bei ungünstigen Sichtbedingungen, wie etwa bei sehr hoch angehobener Lastgabel oder in schlecht beleuchteten Bereichen eines Lagers, kann dies mühsam sein bzw. zumindest erhebliche Zeit erfordern, da besonders langsam und sorgfältig gesteuert werden muss. Weiterhin werden die Umschlagsleistung und der effiziente Einsatz von Flurförderzeugen auch dadurch beeinträchtigt, dass Fahrer bzw. Bedienpersonen von Flurförderzeugen eventuell noch keine ausreichende Übung im Bedienen und im Steuern des Flurförderzeugs haben.
- Bekannt ist, durch Videovorrichtungen die Lastaufnahmevorrichtung und ein gegebenenfalls vor oder auf der Lastaufnahmevorrichtung befindliches Transportmittel mit Last, wie etwa eine beladene Palette, zu erfassen und zeitgleich auf einem Monitor abzubilden. Dies soll es dem Fahrer ermöglichen bzw. erleichtern, die Lastaufnahmevorrichtung optimal zu positionieren. Ebenso können solche Systeme aus Kamera und Monitor auch den Umgebungsbereich des Flurförderzeugs im Fahrbetrieb ganz allgemein abbilden und darstellen. Primäre Anwendungsfelder sind hierbei die Lastaufnahme in großen Hubhöhen und das Fahren bei eingeschränkten Sichtverhältnissen wie vor allem die Rückwärtsfahrt sowie das Vorwärtsfahren bei Sichtbehinderung durch die aufgenommene Last.
- Bekannt sind auch fahrerlose Transportsysteme, bei denen durch eine Kamera gewonnene Bilddaten zur Generierung von Steuerbefehlen an die Fahrzeugsteuerung verwendet werden.
- Im Verhältnis zu dem Nutzen der zuvor beschriebenen Technologien nach dem Stand der Technik entstehen bedingt durch den erforderlichen Aufwand relativ hohe Kosten. Der Nutzen liegt rein in der Ergonomieverbesserung durch Verbesserung der Sichtsituation des Fahrers ohne diesen durch weitere Funktionen in der Handhabung der Last oder dem Fahrbetrieb zu unterstützen. Im Hinblick auf den erforderlichen Kostenaufwand kommen die beschriebenen Technologien bisher überwiegend nur in einer geringen Zahl von Anwendungsfällen zum Einsatz, wie zum Beispiel bei Fahrzeugen für Hochregallager mit sehr großen Hubhöhen.
- Optische Sensoren stehen inzwischen in sehr kompakten Maßen und kostengünstig gerade als miniaturisierte Kameras zur Verfügung, z. B. für den verbreiteten Einsatz in Mobiltelefonen. Auch kann durch den Einsatz mehrerer optischer Sensoren innerhalb eines Gehäuses der Abbildungsbereich vergrößert werden bzw. können dreidimensionale Daten durch Kombination der Sensordaten der einzelnen Sensoren gewonnen werden. Zudem stehen aus dem Bereich der Video-Entertainment-Branche Bildsensorkombinationen zur Verfügung, die neben bildgebenden Kamerasensoren hiermit korrelierte Tiefenmesssensoriken einsetzen und dadurch dreidimensionale Bilddaten bereitstellen können.
- Aus der
DE10 2006 012 205 A1 ist eine Erfassung der Form und der Position einer Last durch eine dreidimensionale Kamera bekannt, die im Infrarotbereich arbeitet. Eine Bedienperson wird beim Aufnehmen der Last insoweit unterstützt, als bei Gefahr einer Kollision des Lastaufnahmemittels mit der Last oder dem Regal eine Warnung abgegeben wird sowie Fahr- und/oder Hubbewegungen des Flurförderzeugs unterbunden werden. - Nachteilig an diesem Stand der Technik ist, dass dadurch nicht ermöglicht wird, auch bei Einsatz von Bedienpersonen mit wenig Erfahrung eine hohe Umschlagsleistung bzw. Arbeitsleistung des Flurförderzeugs zu erzielen.
- Aus der
DE 10 2008 027 701 A1 ist ein Steuerungsverfahren für ein autonomes, vollautomatisches Flurförderzeug mit einem Lasersensor im Bereich des Lastaufnahmemittels bekannt. Aus Daten des Sensors kann die relative Position einer aufzunehmenden Last gegenüber einem Lastaufnahmemittel durch eine Steuerungsvorrichtung bestimmt werden und nachfolgend die Sollausrichtung des Lastaufnahmemittels für die Aufnahme der Last berechnet werden. Die Istausrichtung des Lastaufnahmemittels wird durch die Steuerungsvorrichtung vollautomatisch korrigiert. - Nachteilig an diesem Stand der Technik ist, dass es jedoch sehr aufwändig und kostenintensiv ist, diese Steuerung so sicher auszulegen, dass eine Funktionsweise ohne menschliche Überwachung zulässig und möglich ist. Auch ist dieser Stand der Technik naturgemäß nur anwendbar, wenn sämtliche Bedienungsfunktionen wie Ansteuerfunktionen einer Arbeitshydraulik, eines Lastaufnahmemittels und Fahrfunktionen des Flurförderzeugs voll automatisiert betätigt werden können.
- Die
EP0800129A1 offenbart ein Flurförderzeug, das wahlweise manuell oder automatisch betreibbar ausgebildet ist. Dabei ist das Kontrollsystem zur automatischen Verwaltung der Bewegungen von Paletten ausgebildet. - Der vorliegenden Erfindung liegt die Aufgabe zugrunde, ein Steuerungsverfahren für ein Flurförderzeug sowie ein zugehöriges Flurförderzeug zur Verfügung zu stellen, mit dem eine leichte Bedienbarkeit auch für mit der Bedienung unerfahrene Personen ermöglicht wird und mit dem die Umschlagsleistung des Flurförderzeugs erhöht werden kann.
- Diese Aufgabe wird durch ein Steuerungsverfahren mit den Merkmalen des unabhängigen Patentanspruchs 1 sowie durch ein Flurförderzeug mit den Merkmalen des unabhängigen Patentanspruchs 18 gelöst. Vorteilhafte Weiterbildungen des Steuerungsverfahrens werden in den Unteransprüchen angegeben.
- Die Aufgabe wird durch ein Steuerungsverfahren für ein Flurförderzeug mit mindestens einer auf den Bereich eines Lastaufnahmemittels ausgerichteten Kamera, einem Monitor und einer Steuerungsvorrichtung gelöst, wobei bei dem Steuerungsverfahren, wenn sich das Flurförderzeug mit dem Lastaufnahmemittel vor einer aufzunehmenden Last befindet, die folgenden Schritte durchgeführt werden:
- Erfassen der Last mittels Bildverarbeitungsverfahren durch die Steuerungsvorrichtung, wie beispielsweise Muster- oder Objekterkennung, Suchen einer Lasttransportvorrichtung der Last durch die Steuerungsvorrichtung, Bestimmen der relativen Position der Lasttransportvorrichtung gegenüber dem Lastaufnahmemittel und der relativen Position der Aufnahmeelemente der Lasttransportvorrichtung, die für das Lastaufnahmemittel des Flurförderzeugs vorgesehen sind, durch die Steuerungsvorrichtung, Darstellen von zumindest Teilen der Last sowie der Aufnahmeelemente auf dem Monitor, Markieren der Aufnahmeelemente in der Darstellung auf dem Monitor, Abfragen einer Bestätigungseingabe, sowie im Falle einer Bestätigungseingabe Aufnehmen der Last auf das Lastaufnahmemittel durch automatisches Einstellen und Ausrichten der durch die Steuerung ansteuerbaren Funktionen des Lastaufnahmemittels und der durch die Steuerungsvorrichtung ansteuerbaren Fahrfunktionen des Flurförderzeugs und Anzeigen von einzustellenden Werten für Funktionen des Lastaufnahmemittels und Fahrfunktionen des Flurförderzeugs auf dem Monitor, die nicht automatisch durch die Steuerungsvorrichtung angesteuert werden können.
- >
- Vorteilhaft kann damit die Umschlagsleistungen und der effiziente Einsatz von Flurförderzeugen erhöht werden, wenn eine Bedienperson noch relativ ungeübt in der Bedienung des Flurförderzeugs ist. Gerade das zuverlässige und sichere Aufnehmen einer Last, ohne die Last oder sonstige Gegenstände in der Nähe zu beschädigen, erfordert einige Übung und ist erst nach einiger Routine mit größerer Geschwindigkeit durchführbar. Dies gilt umso mehr, wenn die Last zum Beispiel sich in einem hohen Regal in einer höheren Lagerposition befindet. In einem solchen Fall bestehen zum einen ungenügende Sichtverhältnisse und zum anderen wirken sich Steuerbefehle des Bedieners des Flurförderzeugs, etwa beispielsweise eines Schubmaststaplers oder aber auch eines Gegengewichtsgabelstapler oder Gabelhochhubwagens, in abweichender Art und Weise aus, wie bei einer Position nahe am Boden. Beispielsweise kann es zu Schwingungen und Verzögerungen kommen durch die Elastizität eines Hubmastes. Die Gefahr von Unfällen, Beschädigungen der Last, Schäden an dem Flurförderzeug sowie von Schäden etwa an Regalen wird verringert und zugleich können auch weniger geübte Fahrer, wie etwa temporäre Arbeitskräfte oder nur in zeitlich geringem Umfang als Aushilfe tätige Arbeitskräfte eingesetzt werden. Sobald die Steuerungsvorrichtung eine Abfolge von Ansteuerbefehlen der Funktionen des Lastaufnahmemittels sowie gegebenenfalls von Fahrbewegungen des Flurförderzeugs bestimmt hat, um das Lastaufnahmemittel, beispielsweise eine Lastgabel mit den Gabelzinken, in die Aufnahmeelemente einer Lasttransportvorrichtung für die Last, beispielsweise einer Palette mit den für die Gabelzinken vorgesehenen Öffnungen, zu bewegen, werden diese Aufnahmeelemente auf dem Monitor, alternativ aber auch auf einer anderen geeigneten, gegebenenfalls bereits vorhandenen Anzeigevorrichtung des Flurförderzeugs, markiert dargestellt. Die automatische Ansteuerung der Funktionen bzw. Fahrbewegung erfolgt erst, nachdem die Steuerungsvorrichtung ein Signal erhält, dass eine Bestätigungseingabe durch den Fahrer erfolgt ist. Eine solche Bestätigungseingabe kann ein eigens vorgesehener Schalter, ein Schaltfeld auf dem auf Berührungen reagierenden Monitor, oder eine sonstige geeignete, jedoch bewusst durch den Fahrer zu betätigende Eingabe sein. Anschließend führt die Steuerungsvorrichtung diejenigen erforderlichen Bewegungen aus, um das Lastaufnahmemittel in die Aufnahmeelemente zu bewegen, die als Bewegungen von der Steuerungsvorrichtung automatisch vorgenommen werden können. Üblicherweise erfolgen die Funktionen eines Lastaufnahmemittels durch Arbeitshydrauliken, deren Ventile im Regelfall als elektrisch betätigbare Steuerventile ausgeführt sind, wobei von Hand durchgeführte Bedienungseingaben über Bedienelemente erfolgen, die ein elektrisches Signal abgeben. Dies ermöglicht eine vollautomatische Ansteuerung durch die Steuerungsvorrichtung bei dem erfindungsgemäßen Verfahren, die kostengünstig umzusetzen ist. Für Funktionen, die nicht über die Steuerungsvorrichtung angesteuert werden können, werden durch eine grafische Anzeige auf dem Monitor, aber auch gegebenenfalls auf einer anderen alternativ zur Verfügung stehenden Anzeigemöglichkeit, die einzustellenden Werte für das Bedienelement angezeigt. Dies können beispielsweise Umdrehungen eines Lenkrads sein, aber auch eine über Pfeile gesteuerte Anzeige, die vorgibt, in welcher Richtung ein Bedienelement zu betätigen ist, bis der einzustellende Wert erreicht ist. Auf dieselbe Weise ist dies auch für Bedienhebel für eine Hubhöhe, einen Seitenschub, einen Mastschub, eine Neigung des Lastaufnahmemittels oder eine Mastneigung möglich. Es kann auch vorgesehen werden, dass Funktionen, die von der Steuerungsvorrichtung vollautomatisch angesteuert werden könnten, auf diese Weise betätigt werden. Vorteilhaft unterliegen die automatisierten Bewegungen des Flurförderzeugs somit einer menschlichen Kontrolle sowohl hinsichtlich der richtigen Bestimmung eines vorgesehenen automatisierten Bewegungsablaufs als auch während des automatisierten Bewegungsablaufs des Flurförderzeugs. Daher können Sicherheitsanforderungen leichter erfüllt werden und kann ein erforderlicher größerer Aufwand wie bei autonomen Flurförderzeugen vermieden werden. Das Verfahren ist auch insofern kostengünstig umzusetzen, da für eine Vielzahl der Funktionen des Lastaufnahmemittels wie auch der Fahrfunktionen des Flurförderzeugs bereits die Möglichkeit einer automatisierten Ansteuerung besteht und für die verbleibenden erforderlichen Funktionen eine solche nicht erforderlich ist. Insbesondere kann beispielsweise eine Steuerung eines Bremspedals und eines Gaspedals allein unter menschlicher Kontrolle verbleiben.
- Vorteilhaft ist die Lasttransportvorrichtung eine Palette und sind die Aufnahmeelemente Öffnungen für Gabelzinken einer Lastgabel als Lastaufnahmeelement.
- Die Aufnahme einer Palette mit einer Lastgabel erfordert eine relativ genaue Ausrichtung der Gabelzinken hinsichtlich des Abstands zwischen diesen, der Höhe und Längsausrichtung, um diese in die Öffnungen der Palette einführen zu können. Hierbei erweist sich das erfindungsgemäße Verfahren als besonders vorteilhaft.
- In einer günstigen Weiterbildung des erfindungsgemäßen Verfahrens werden von der Steuerungsvorrichtung die Kanten der Last und/oder die Kanten der Lasttransportvorrichtung erfasst.
- Bei vielen Lasttransportvorrichtungen, insbesondere Paletten, befinden sich diese unterhalb der Last. Durch das Aufsuchen von Kanten und äußeren Konturen, insbesondere senkrecht stehenden Kanten, kann daher bei einem Bildmuster die Lasttransportvorrichtung gefunden werden, die sich am unteren Ende dieser Kanten befinden muss. Die Last kann aber natürlich auch vollständig von der Lasttransportvorrichtung umschlossen sein, wie etwa im Fall eines Gitterkorbs, bei dem im Regelfall durch das Erfassen der Last bereits die Lasttransportvorrichtung erfasst wird.
- Vorteilhaft können eine oder mehrere weitere Bestätigungseingaben vor oder zwischen der Ansteuerung einzelner Funktionen des Lastaufnahmemittels und/oder der Ansteuerung einzelner Fahrfunktionen des Flurförderzeugs abgefragt werden.
- Die automatisierte Ansteuerung einzelner Funktionen des Lastaufnahmemittels und/oder einzelner Fahrfunktionen des Flurförderzeugs kann nacheinander, aber auch zur zeitlichen Optimierung gleichzeitig erfolgen. Überdies kann auch gleichzeitig die Ansteuerung derjenigen Funktionen durch die Bedienperson erfolgen, die nicht automatisiert angesteuert werden können. Dabei kann vorgesehen werden, dass weitere Bestätigungseingaben auf die gleiche, oben beschriebene Art und Weise erfolgen müssen, um Sicherheitsanforderungen zu erfüllen, beispielsweise wenn bei einer bestimmten automatisierten Bewegungen eine verstärkte Überwachung durch die Bedienperson sichergestellt werden soll.
- In einer günstigen Ausführungsform des erfindungsgemäßen Verfahrens wird eine andauernde Bestätigungseingabe abgefragt und bei Fehlen eines Bestätigungssignals die Ansteuerung der Funktionen des Lastaufnahmemittels und/oder der Fahrfunktionen des Flurförderzeugs gestoppt.
- Eine Bestätigungseingabe kann auch dadurch vorgesehen werden, dass ein entsprechendes Signal andauernd gegeben werden muss und bei einem "Loslassen" alle automatisierten Bewegungen gestoppt werden.
- Das Lastaufnahmemittel kann an einem Hubmast höhenbeweglich geführt sein und Funktionen des Lastaufnahmemittels können die Hubhöhe und/oder eine Neigung und/oder ein Mastschub des Hubmastes sein.
- Das erfindungsgemäße Verfahren ist besonders vorteilhaft wenn Lasten auch in großen Höhen aufgenommen werden müssen, da es zu Schwingungen und elastischen Verformungen des Hubmastes bei großen Hubhöhen kommen kann, die die Bedienung zusätzlich erschweren können. Insbesondere sind jedoch die Sichtverhältnisse bei großer Hubhöhe ungünstig. Vorteilhaft unterstützt das erfindungsgemäße Verfahren als Assistenzsystem eine Bedienperson im Gegensatz beispielsweise zu einem reinen Kamerasystem nach dem Stand der Technik auch bei der Bedienung und vermeidet so die Probleme, die auftreten können, wenn eine Bedienperson nur anhand eines Kamerabildes Bewegungen eines Lastaufnahmemittels steuern muss.
- Eine Funktion des Lastaufnahmemittels kann eine Seitenschubvorrichtung sein.
- Vorteilhaft ist das Lastaufnahmemittel eine Lastgabel und eine Funktion des Lastaufnahmemittels eine Gabelzinkenverstellung.
- Eine schnelle seitliche Ausrichtung der Gabelzinken und rasche Einstellung des Abstands zwischen den Gabelzinken wird sich vorteilhaft auf die Umschlagsleistung des Flurförderzeugs aus.
- In der günstigen Ausgestaltung des erfindungsgemäßen Verfahrens erfolgt die Anzeige von einzustellenden Werten für Funktionen des Lastaufnahmemittels und für Fahrfunktionen des Flurförderzeugs auf dem Monitor kontinuierlich, bis das Lastaufnahmemittel sich in den Aufnahmeelementen befindet.
- Es ist besonders vorteilhaft, die einzustellenden Werte für die Bedienelemente, die von der Bedienperson von Hand bedient werden, kontinuierlich und eventuell korrigiert anzuzeigen, bis das Lastaufnahmemittel in den Aufnahmeelementen der Lasttransportvorrichtung angelangt ist.
- Vorteilhaft wird für den Lenkwinkel als Fahrfunktion des Flurförderzeugs als einzustellender Wert ein Wertebereich eines erforderlichen Lenkeinschlags angezeigt sowie der Istwert des Lenkeinschlags.
- Vorteilhaft erfordert das erfindungsgemäße Verfahren keine autonome Lenkung mit den entsprechenden Anforderungen an Sicherheit und Zuverlässigkeit.
- Das Lastaufnahmemittel kann eine Lastgabel sein und auf dem Monitor der Weg der Gabelzinken in die Aufnahmeelemente der Lasttransportvorrichtung dargestellt werden.
- Eine solche Darstellung lässt eine intuitive Überprüfung durch die Bedienperson zu, ob die Gefahr von Kollisionen besteht.
- In günstiger Ausgestaltung des Verfahrens erfolgt bei Erkennen einer Kollisionsgefahr ein Warnton und/oder die weitere Ansteuerung der Funktionen des Lastaufnahmemittels und/oder der Fahrfunktionen des Flurförderzeugs wird gestoppt.
- Es kann auch gegen Ende der Bewegung in die Aufnahmeelemente ein Abbremsen erfolgen, insbesondere wenn Gabelzinken eine Palette aufnehmen und an das Ende des Einfahrens in die Palette gelangen.
- Es können weitere optische Sensoren für die Erfassung der Last vorgesehen sein, die mit der Steuerungsvorrichtung verbunden sind.
- Durch weitere optische Sensoren kann die Genauigkeit der Erfassung verbessert werden. Solche optischen Sensoren stehen als CMOS-Bildsensoren aber auch als miniaturisierte Kameras preisgünstig als Massenprodukte zur Verfügung. Die weiteren optischen Sensoren können vorzugsweise neben den bereits genannten Bildinformationen, etwa codiert in Helligkeits- und Farbwerte der Bildpunkte, weitere Informationen erfassen, wie beispielsweise Entfernungsinformationen in Form von Punktwolken. Vorteilhaft kann ganz allgemein durch zwei Kameras ein Stereobild gewonnen werden, aus dem sich Informationen über die Entfernung der einzelnen Bildpunkte gewinnen lassen.
- In einer Weiterbildung kann die Kamera eine Time Of Flight Kamera sein.
- Durch eine solche Kamera lässt sich für jeden Bildpunkt auch eine Entfernungsinformation gewinnen und verwerten.
- In einer vorteilhaften Ausgestaltung des Verfahrens ist die Kamera eine Stereokamera.
- Durch eine Stereokamera lässt sich sehr kompakt in einer Kamera ein doppeltes Bild gewinnen, aus dem sich eine Entfernungsinformation berechnen lässt.
- In einer vorteilhaften Weiterbildung ist die Kamera an einem Gabelträger des Lastaufnahmemittels angeordnet, insbesondere in der Höhe verfahrbar angeordnet und kann in eine Position unterhalb des Lastaufnahmemittels verfahren werden. Beispielsweise kann die Kamera an einer senkrechten Schiene hinter dem bevorzugt als Lastgabel ausgebildeten Lastaufnahmemittel so an dem Gabelträger in der Höhe verfahrbar angeordnet sein, dass diese bei einer auf der Lastgabel aufliegenden Last nach unten verfahren werden kann, bis die Kamera ein Blickfeld unter den Gabelzinken der Lastgabel erreicht. Es ist auch möglich, generell für die Bildaufnahme bei dem erfindungsgemäßen Verfahren die Kamera in diese untere Position zu verfahren. Denkbar sind auch verfahrbare Kameras, die nicht senkrecht, sondern waagerecht bewegt werden können.
- Der Monitor kann ein Touchscreen sein.
- Das erfindungsgemäße Verfahren ist auch anwendbar, wenn eine Lasttransportvorrichtung keine Last trägt, etwa wenn eine einzelne leere Palette ohne Last aufgenommen wird. In einem solchen Fall muss die Bildverarbeitung entsprechend angepasst werden, so dass das Muster einer leeren Lasttransportvorrichtung ohne Last erkannt wird. Das erfindungsgemäße Verfahren kann dabei insofern auch modifiziert werden, als nicht nach einer eigentlichen Last gesucht wird.
- Die Aufgabe wird auch durch ein Flurförderzeug mit mindestens einer auf den Bereich eines Lastaufnahmemittels ausgerichteten Kamera, einem Monitor und einer Steuerungsvorrichtung gelöst, bei dem die Steuerungsvorrichtung ein zuvor beschriebenes Verfahren durchführt.
- Das Flurförderzeug weist die bereits zuvor geschilderten Vorteile auf.
- Weitere Vorteile und Einzelheiten der Erfindung werden anhand der in den schematischen Figuren dargestellten Ausführungsbeispiele näher erläutert. Hierbei zeigt
- Fig.1
- ein Flurförderzeug in Perspektivansicht,
- Fig. 2
- stark schematisch ein Flurförderzeug der
Fig. 1 sowie eine aufzunehmende Last in Aufsicht, - Fig. 3
- eine aufzunehmende Last im Perspektivansicht,
- Fig. 4
- ein Monitorbild und
- Fig. 5
- ein Schema des erfindungsgemäßen Verfahrens.
- In der
Fig. 1 ist ein Flurförderzeug in perspektivischer Ansicht dargestellt, bei dem das erfindungsgemäße Steuerungsverfahren zur Anwendung kommt. Bei dem Flurförderzeug handelt es sich um einen Schubmaststapler mit einem ersten Radarm 1 mit einer Laufrolle 2 und einem zweiten Radarm 3, ebenfalls mit einer Laufrolle 2. Das erfindungsgemäße Verfahren ist jedoch jederzeit auch bei jeder anderen Art eines Flurförderzeugs und insbesondere Gabelstaplers, wie etwa einem Gegengewichtsgabelstapler, oder etwa eine Gabelhochhubwagen einsetzbar. Vor allem ist das erfindungsgemäße Steuerungsverfahren auch einsetzbar bei Flurförderzeugen, die keinen Hubmast aufweisen. Bei dem beispielhaft dargestellten Schubmaststapler ist an einem Hubmast 4 ein Gabelträger 11 angeordnet, an dem eine Lastgabel 5 als Lastaufnahmemittel 9 befestigt ist. Hinter dem Hubmast 4 ist eine Batterie 6 angeordnet. Der die Lastgabel 5 tragende Gabelträger 11 ist an dem Hubmast 4 mittels eines Hubantriebs anhebbar und absenkbar. Der Hubmast 4 kann zwischen den Radarmen 1, 3 nach vorne verschoben werden, um eine Last aufzunehmen. An den in einer Fahrzeuglängsachse des Schubmaststaplers vorderen Ende des ersten Radarms 1 befindet sich über der Laufrolle 2 ein erstes Schutzblech 7 und über der Laufrolle 2 des zweiten Radarms 3 ebenfalls ein zweites Schutzblech 8. An dem Gabelträger 11 ist eine Kamera 10 angeordnet. Im dargestellten Ausführungsbeispiel ist die Kamera 10 in Fahrzeugquerrichtung im mittleren Bereich des Gabelträgers 11 angeordnet. Die Kamera 10 ist bevorzugt in der Höhe verstellbar an dem Gabelträger 11 angeordnet und kann in eine Position unterhalb der Lastgabel 5 gefahren werden. Weiterhin kann an einer Gabelzinke 12 eine Minikamera 13 als weiterer optischer Sensor 14 angeordnet werden. Solche Minikameras 13 stehen in robuster und kostengünstiger Ausführung zur Verfügung und werden beispielsweise zahlreich eingesetzt in Mobiltelefonen. - Die
Fig. 2 zeigt schematisch das erfindungsgemäße Flurförderzeug in Sicht von oben. Zwischen dem ersten Radarm 1 und dem zweiten Radarm 3 mit der Laufrolle 2 ist der Hubmast 4 mit der Lastgabel 5 angeordnet. An dem Gabelträger 11 mit der Lastgabel 5 ist die Kamera 10 angeordnet, die mit ihrem Erfassungsbereich 17 eine vor der Lastgabel 5 als Lastaufnahmemittel 9 befindliche Last 15 erfasst. - Eine nicht näher dargestellte Steuerungsvorrichtung erkennt aus den Bilddaten der Kamera 10 die relative, im Beispielsfall verdrehte Anordnung der Last 15 bzw. Palette 16.
- Die
Fig. 3 zeigt eine Perspektivansicht der aufzunehmenden Last 15 auf einer Palette 16 als Lasttransportvorrichtung 18. Die Steuerungsvorrichtung sucht mithilfe von Bildverarbeitungsmethoden nach charakteristischen Punkten an Last 15 und Lasttransportvorrichtung 18, vorzugsweise senkrechten Kanten 19 der Last 15, anhand derer die jeweiligen Enden der Lasttransportvorrichtung 18 gefunden werden können. Anhand dieser Kanten 19 wird an deren jeweils unteren Ende die Transportvorrichtung 18 gesucht. Anhand von Kanten 20 der Kontur der Lasttransportvorrichtung 18, hier der Palette 16, wird deren Lage und relative Ausrichtung bestimmt. Dadurch können Öffnungen 21 der Palette 16, die für die Aufnahme der Gabelzinken 12 der Lastgabel 5 dienen und Aufnahmeelemente 22 für das Lastaufnahmemittel 9 des Flurförderzeugs bilden, gefunden werden. - Die
Fig. 4 zeigt ein Monitorbild eines Monitors 23, der im Sichtbereich der Bedienperson des Flurförderzeugs angeordnet ist. Auf diesem Monitorbild ist ein Ausschnitt der durch die Kamera 10 erfassten Darstellung der Last 15 mit der Lasttransportvorrichtung 18 in Form einer Palette 16 aus derFig. 3 abgebildet. Durch eingeblendete Pfeile sind die durch die Steuerungsvorrichtung erkannten Öffnungen 21 entsprechend den Aufnahmeelementen 22 für das Lastaufnahmemittel 9 des Flurförderzeugs hervorgehoben. - Eine Bedienperson des Flurförderzeugs kann nun das richtige Erkennen der Öffnungen 21 bestätigen und durch eine Bestätigungseingabe, beispielsweise durch einen hier nicht dargestellten Schalter oder auch ein Bedienfeld 24 des als Touchscreen 25 ausgebildeten Monitors 23, das automatische Ansteuern der Funktionen des Lastaufnahmemittels 9 sowie der Fahrfunktionen des Flurförderzeugs starten. Zugleich wird auf dem Monitor 23 für nicht automatisch ansteuerbare Funktionen, im vorliegenden Fall die Lenkung des Flurförderzeugs, ein einzustellender Wert angezeigt. Dadurch richtet sich die Lastgabel 5 entsprechend den Öffnungen 21 aus und, wenn die Bedienperson die entsprechenden Anweisungen über die einzustellenden Werte beachtet, gelangen die Gabelzinken 12 der Lastgabel 5 in die Öffnungen 21. Durch diese Assistenzfunktion können auch Bedienpersonen mit wenig Erfahrung eine Last 15 mitsamt Lasttransportvorrichtung 18 sicher aufnehmen.
- Die Steuerungsvorrichtung kann dabei in einen Steuerungscomputer des Fahrzeugs integriert sein oder vollständig bzw. in Teilen aus einem eigenen Computer bestehen.
- Die
Fig. 5 zeigt ein Schema des erfindungsgemäßen Verfahrens. Der Monitor 23 kann aus jeder Form von Bildwiedergabemitteln bestehen, z. B. einem Farbbildschirm in LCD-Technik. Die Funktionen 26 des Lastaufnahmemittels 9 werden durch die Bedienperson im normalen Betrieb über Arbeitshydraulikbedienelemente 27 angesteuert und bestehen im Regelfall aus hydraulischen Elementen, die durch elektrisch ansteuerbare Ventile zumeist bereits automatisiert ansteuerbar sind. Über eine Fahrantriebsbedienung 28 der Fahrfunktionen 29 des Flurförderzeugs ist eine Bedienperson in der Lage, die Fahrzeugbewegung zu kontrollieren. Bei einem Gabelstapler beispielsweise durch eine Bedienung mittels Lenkrad, Fahrtrichtungswahlschalter, Fahrpedal und Bremspedal. Eine Bildverarbeitungseinheit 30 bildet einen Teil einer Steuerungsvorrichtung 31, die die Signale eines oder mehrerer optischer Sensoren 10, 14 in Echtzeit erfassen und verarbeiten kann. Einen optischen Sensor stellen dabei in dem vorliegenden Beispielsfall die Kamera 10 sowie der optische Sensor 14 in derFig. 1 dar. Die optischen Sensoren 10, 14 sind in der Lage, Helligkeits- und Farbinformationen durch beispielsweise einen Kamerachip aufzunehmen und können bei entsprechender Auslegung auch Entfernungen zu Objekten mit optischen Mitteln bestimmen. - Die Funktionen 26 des Lastaufnahmemittels 9 sowie die Fahrfunktionen 29 des Flurförderzeugs sind in der Darstellung der
Fig. 5 zu Fahrzeugantrieben 32 zusammengefasst. Die Arbeitshydraulikbedienelemente 27, die Fahrantriebsbedienung 28 und der Monitor 23 sind im Bereich eines Fahrerarbeitsplatzes 33 angeordnet. Die Bildverarbeitungseinheit 30 sowie die optischen Sensoren 10, 14 sind im Bereich des Lastaufnahmemittels 9, hier dem Gabelträger 11 und der Gabelzinke 12 angeordnet. - Eine Fahrzeugsteuerung 34 bildet im vorliegenden Beispielsfall ebenfalls einen Teil der Steuerungsvorrichtung 31 und verbindet über uni- oder bidirektionale Kommunikationsmittel die zuvor genannten Elemente.
- Die Bildverarbeitungseinheit 30 kann alternativ auch an anderer Stelle angeordnet sein und/oder in die Fahrzeugsteuerung 34 ebenfalls integriert werden, so dass die Fahrzeugsteuerung 34 zugleich die vollständige Steuerungsvorrichtung 31 des zuvor beschriebenen Ausführungsbeispiels bildet.
- Ein Signal S1 überträgt ein Bestätigungssignal, das bei der Abfrage der Bestätigungseingabe durch die Bedienperson erzeugt wird, sowie weitere Auswahl- und Steuersignale.
- Das Signal S2 überträgt das Bild der Kamera 10, dessen Qualität durch Bildverarbeitungsalgorithmen der Steuerungsvorrichtung 31 verbessert werden kann und das zusätzlich mit überlagerten algorithmisch generierte Zusatzinformationen versehen werden kann, z. B. Distanzinformationen, Wegvorgaben und Markierungen von Gefahrenbereichen. Das Signal S3 umfasst Steuersignale der Arbeitshydraulikbedienelemente 27 und das Signal S4 Steuersignale der Fahrantriebsbedienung 28. Das Signal S5 ist das Bildinformationssignal der Kamera 10 und das Signal S6 ist das Bildinformationssignal des optischen Sensors 14.
- Über ein Signal S7 werden generierte Steuersignale der Bildverarbeitungseinheit 30 zu der Fahrzeugsteuerung 34 übertragen. Ein Signal S8 bildet die Steuersignale der Funktionen 26 des Lastaufnahmemittels 9 und ein Signal S9 dient zur Ansteuerung der Fahrfunktionen 29.
Claims (18)
- Steuerungsverfahren für ein Flurförderzeug mit mindestens einer auf den Bereich eines Lastaufnahmemittels (9) ausgerichteten Kamera (10), einem Monitor (23) und einer Steuerungsvorrichtung (31), wobei bei dem Steuerungsverfahren, wenn sich das Flurförderzeug mit dem Lastaufnahmemittel (9) vor einer aufzunehmenden Last (15) befindet, die folgenden Schritte durchgeführt werden:- Erfassen der Last (15) mittels Bildverarbeitungsverfahren durch die Steuerungsvorrichtung (31), wie beispielsweise Muster- oder Objekterkennung,- Suchen einer Lasttransportvorrichtung (18) der Last (15) durch die Steuerungsvorrichtung (31),- Bestimmen der relativen Position der Lasttransportvorrichtung (18) gegenüber dem Lastaufnahmemittel (9) und der relativen Position der Aufnahmeelemente (22) der Lasttransportvorrichtung (18), die für das Lastaufnahmemittel (9) des Flurförderzeugs vorgesehen sind, durch die Steuerungsvorrichtung (31),- Darstellen von zumindest Teilen der Last (15) sowie der Aufnahmeelemente (22) auf dem Monitor (23),- Markieren der Aufnahmeelemente (22) in der Darstellung auf dem Monitor (23),- Abfragen eine Bestätigungseingabe (S1),- im Falle einer Bestätigungseingabe (S1) Aufnehmen der Last (15) auf das Lastaufnahmemittel (9) durch automatisches Einstellen und Ausrichten der durch die Steuerungsvorrichtung (31) ansteuerbaren Funktionen (26) des Lastaufnahmemittels und der durch die Steuerungsvorrichtung (31) ansteuerbaren Fahrfunktionen (29) des Flurförderzeugs und- Anzeigen von einzustellenden Werten für Funktionen (26) des Lastaufnahmemittels und Fahrfunktionen (29) des Flurförderzeugs auf dem Monitor (23), die nicht automatisch durch die Steuerungsvorrichtung (31) angesteuert werden können.
- Steuerungsverfahren nach Anspruch 1,
dadurch gekennzeichnet,
dass die Lasttransportvorrichtung (18) eine Palette (16) ist und die Aufnahmeelemente (22) Öffnungen (21) für Gabelzinken (12) einer Lastgabel (5) als Lastaufnahmeelement (9) sind. - Steuerungsverfahren nach Anspruch 1 oder 2,
dadurch gekennzeichnet,
dass von der Steuerungsvorrichtung die Kanten (19) der Last (15) und/oder die Kanten (20) der Lasttransportvorrichtung (18) erfasst werden. - Steuerungsverfahren nach einem der Ansprüche 1 bis 3,
dadurch gekennzeichnet,
dass eine oder mehrere weitere Bestätigungseingaben vor oder zwischen der Ansteuerung einzelner Funktionen (26) des Lastaufnahmemittels und/oder der Ansteuerung einzelner Fahrfunktionen (29) des Flurförderzeugs abgefragt werden. - Steuerungsverfahren nach einem der Ansprüche 1 bis 4,
dadurch gekennzeichnet,
dass eine andauernde Bestätigungseingabe abgefragt wird und bei Fehlen eines Bestätigungssignals die Ansteuerung der Funktionen (26) des Lastaufnahmemittels und/oder der Fahrfunktionen (29) des Flurförderzeugs gestoppt wird. - Steuerungsverfahren nach einem der Ansprüche 1 bis 5,
dadurch gekennzeichnet,
dass das Lastaufnahmemittel (9) an einem Hubmast (4) höhenbeweglich geführt ist und Funktionen (26) des Lastaufnahmemittels die Hubhöhe und/oder eine Neigung und/oder ein Mastschub des Hubmastes (4) sind. - Steuerungsverfahren nach einem der Ansprüche 1 bis 6,
dadurch gekennzeichnet,
dass eine Funktion (26) des Lastaufnahmemittels eine Seitenschubvorrichtung ist. - Steuerungsverfahren nach einem der Ansprüche 1 bis 7,
dadurch gekennzeichnet,
dass das Lastaufnahmemittel (9) eine Lastgabel (5) ist und eine Funktion des Lastaufnahmemittels (9) eine Gabelzinkenverstellung ist. - Steuerungsverfahren nach einem der Ansprüche 1 bis 8,
dadurch gekennzeichnet,
dass die Anzeige von einzustellenden Werten für Funktionen (26) des Lastaufnahmemittels (9) und für Fahrfunktionen (29) des Flurförderzeugs auf dem Monitor (23) kontinuierlich erfolgt, bis das Lastaufnahmemittel (9) sich in den Aufnahmeelementen (22) befindet. - Steuerungsverfahren nach Anspruch 9,
dadurch gekennzeichnet,
dass für den Lenkwinkel als Fahrfunktion (29) des Flurförderzeugs als einzustellender Wert ein Wertebereich eines erforderlichen Lenkeinschlags angezeigt wird sowie der Istwert des Lenkeinschlags. - Steuerungsverfahren nach Anspruch 10,
dadurch gekennzeichnet,
dass das Lastaufnahmemittel (9) eine Lastgabel (5) ist und auf dem Monitor (23) der Weg der Gabelzinken (12) in die Aufnahmeelemente (22) der Lasttransportvorrichtung (18) dargestellt wird. - Steuerungsverfahren nach einem der Ansprüche 1 bis 11,
dadurch gekennzeichnet,
dass bei Erkennen einer Kollisionsgefahr ein Warnton erfolgt und/oder die weitere Ansteuerung der Funktionen (26) des Lastaufnahmemittels (9) und/oder der Fahrfunktionen (29) des Flurförderzeugs gestoppt wird. - Steuerungsverfahren nach einem der Ansprüche 1 bis 12,
dadurch gekennzeichnet,
dass weitere optische Sensoren (14) für die Erfassung der Last (15) vorgesehen sind, die mit der Steuerungsvorrichtung (31) verbunden sind. - Steuerungsverfahren nach einem der Ansprüche 1 bis 13,
dadurch gekennzeichnet,
dass die Kamera (10) eine Time Of Flight Kamera ist. - Steuerungsverfahren nach einem der Ansprüche 1 bis 13,
dadurch gekennzeichnet,
dass die Kamera (10) eine Stereokamera ist. - Steuerungsverfahren nach Anspruch 14 oder 15,
dadurch gekennzeichnet,
dass die Kamera (10) an einem Gabelträger (11) des Lastaufnahmemittels (9) angeordnet ist, insbesondere in der Höhe verfahrbar angeordnet und in eine Position unterhalb des Lastaufnahmemittels (9) verfahren werden kann. - Steuerungsverfahren nach einem der Ansprüche 1 bis 16,
dadurch gekennzeichnet,
dass der Monitor (23) eine Touchscreen (25) ist. - Flurförderzeug mit mindestens einer auf den Bereich eines Lastaufnahmemittels (9) ausgerichteten Kamera (10), einem Monitor (23) und einer Steuerungsvorrichtung (31), die ein Verfahren nach einem der Ansprüche 1 bis 14 durchführt.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102012103485 | 2012-04-20 | ||
| DE102012103840 | 2012-05-02 | ||
| DE201210108034 DE102012108034A1 (de) | 2012-04-20 | 2012-08-30 | Steuerungsverfahren für Flurförderzeug sowie Flurförderzeug |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2653429A1 EP2653429A1 (de) | 2013-10-23 |
| EP2653429B1 true EP2653429B1 (de) | 2015-03-25 |
Family
ID=48050502
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP20130162430 Active EP2653429B1 (de) | 2012-04-20 | 2013-04-05 | Steuerungsverfahren für Flurförderzeug sowie Flurförderzeug |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2653429B1 (de) |
| DE (1) | DE102012108034A1 (de) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017124850A1 (de) | 2017-10-24 | 2019-04-25 | Jungheinrich Ag | Flurförderzeug mit einer Gabel und einer Gabelzinkenkamera sowie Verfahren zum Betreiben eines solchen Flurförderzeugs |
| US10430073B2 (en) | 2015-07-17 | 2019-10-01 | Crown Equipment Corporation | Processing device having a graphical user interface for industrial vehicle |
| US10754466B2 (en) | 2016-11-22 | 2020-08-25 | Crown Equipment Corporation | User interface device for industrial vehicle |
| WO2020229593A1 (de) | 2019-05-16 | 2020-11-19 | Jungheinrich Ag | Verfahren zur lagerungsunterstützung bei einem flurförderzeug und flurförderzeug |
| DE102019113606A1 (de) * | 2019-05-22 | 2020-11-26 | Jungheinrich Ag | Flurförderzeug mit Kamerasystem |
| US11591197B2 (en) | 2019-04-05 | 2023-02-28 | The Raymond Corporation | Load handling module for a material handling vehicle |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AU2014277738B2 (en) | 2013-12-19 | 2020-04-30 | The Raymond Corporation | Integrated touch screen display with multi-mode functionality |
| US9932213B2 (en) | 2014-09-15 | 2018-04-03 | Crown Equipment Corporation | Lift truck with optical load sensing structure |
| DE102016119402A1 (de) | 2016-10-12 | 2018-04-12 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einer 3D-Kamera |
| DE102017116625A1 (de) * | 2017-07-24 | 2019-01-24 | Still Gmbh | Flurförderzeug |
| DE102017116626A1 (de) * | 2017-07-24 | 2019-01-24 | Still Gmbh | Flurförderzeug |
| DE102019109007A1 (de) | 2019-04-05 | 2020-10-08 | Jungheinrich Ag | Flurförderzeug und Verfahren zum Betreiben desselben |
| CN111908383B (zh) * | 2020-08-18 | 2023-07-18 | 诺力智能装备股份有限公司 | 一种托盘联动校准装置及方法 |
| CN113177431B (zh) * | 2021-03-15 | 2023-12-08 | 福建电子口岸股份有限公司 | 一种基于机器视觉和深度学习的集卡防吊起方法、系统 |
| DE102022130297A1 (de) | 2022-11-16 | 2024-05-16 | Still Gesellschaft Mit Beschränkter Haftung | Flurförderzeug und Verfahren zum Betreiben eines Flurförderzeugs |
| DE102023125122A1 (de) * | 2023-09-18 | 2025-03-20 | Jungheinrich Aktiengesellschaft | Bestimmung einer Hubhöhe oder -geschwindigkeit eines Lasttragmittels |
| DE102024114325A1 (de) * | 2024-05-22 | 2025-11-27 | Jungheinrich Aktiengesellschaft | Verfahren zur Bestimmung der Pose einer Palette relativ zu einem Flurförderzeug und Flurförderzeug |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19613386A1 (de) * | 1996-04-03 | 1997-10-09 | Fiat Om Carrelli Elevatori | Flurförderzeug, das wahlweise manuell oder automatisch betreibbar ausgebildet ist |
| WO2003062127A1 (en) * | 2002-01-23 | 2003-07-31 | Kabushiki Kaisha Toyota Jidoshokki | Position control device and position control method of stevedoring apparatus in industrial vehicle |
| DE102006012205A1 (de) | 2006-03-16 | 2007-09-20 | Still Gmbh | Flurförderzeug mit einem Hubmast |
| DE102008027701B4 (de) | 2008-04-20 | 2022-10-06 | Still Gesellschaft Mit Beschränkter Haftung | Steuerungsverfahren für Flurförderzeug |
-
2012
- 2012-08-30 DE DE201210108034 patent/DE102012108034A1/de not_active Withdrawn
-
2013
- 2013-04-05 EP EP20130162430 patent/EP2653429B1/de active Active
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11899871B2 (en) | 2015-07-17 | 2024-02-13 | Crown Equipment Corporation | Processing device having a graphical user interface for industrial vehicle |
| US10430073B2 (en) | 2015-07-17 | 2019-10-01 | Crown Equipment Corporation | Processing device having a graphical user interface for industrial vehicle |
| US10949083B2 (en) | 2015-07-17 | 2021-03-16 | Crown Equipment Corporation | Processing device having a graphical user interface for industrial vehicle |
| US10754466B2 (en) | 2016-11-22 | 2020-08-25 | Crown Equipment Corporation | User interface device for industrial vehicle |
| US12405722B2 (en) | 2016-11-22 | 2025-09-02 | Crown Equipment Corporation | User interface device for industrial vehicle |
| US10936183B2 (en) | 2016-11-22 | 2021-03-02 | Crown Equipment Corporation | User interface device for industrial vehicle |
| US11054980B2 (en) | 2016-11-22 | 2021-07-06 | Crown Equipment Corporation | User interface device for industrial vehicle |
| EP3483113B1 (de) * | 2017-10-24 | 2025-04-09 | Jungheinrich Aktiengesellschaft | Flurförderzeug mit einer gabel und einer gabelzinkenkamera sowie verfahren zum betreiben eines solchen flurförderzeugs |
| US10981764B2 (en) | 2017-10-24 | 2021-04-20 | Jungheinrich Ag | Industrial truck having a fork and a fork arm camera and method for operating such an industrial truck |
| DE102017124850A1 (de) | 2017-10-24 | 2019-04-25 | Jungheinrich Ag | Flurförderzeug mit einer Gabel und einer Gabelzinkenkamera sowie Verfahren zum Betreiben eines solchen Flurförderzeugs |
| US11591197B2 (en) | 2019-04-05 | 2023-02-28 | The Raymond Corporation | Load handling module for a material handling vehicle |
| WO2020229593A1 (de) | 2019-05-16 | 2020-11-19 | Jungheinrich Ag | Verfahren zur lagerungsunterstützung bei einem flurförderzeug und flurförderzeug |
| DE102019113606A1 (de) * | 2019-05-22 | 2020-11-26 | Jungheinrich Ag | Flurförderzeug mit Kamerasystem |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102012108034A1 (de) | 2013-10-24 |
| EP2653429A1 (de) | 2013-10-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2653429B1 (de) | Steuerungsverfahren für Flurförderzeug sowie Flurförderzeug | |
| EP2653430B1 (de) | Steuerverfahren für Lastabsetzung eines Flurförderzeugs sowie Flurförderzeug | |
| EP2468678B1 (de) | Flurförderzeug mit einem Sensor zur Erfassung einer räumlichen Umgebung und Verfahren zum Betreiben eines solchen Flurförderzeugs | |
| EP2851331B1 (de) | Verfahren zur Steuerung eines Kommissionierflurförderzeugs | |
| EP3323770B1 (de) | Verfahren zur bereitstellung der positionen von lagerplätzen in einem lager und flurförderzeug | |
| EP3483113B1 (de) | Flurförderzeug mit einer gabel und einer gabelzinkenkamera sowie verfahren zum betreiben eines solchen flurförderzeugs | |
| EP2439165B1 (de) | Flurförderzeug mit einem höhenverstellbaren Lasttragmittel | |
| EP2987761A1 (de) | Flurförderzeug zum kommissionieren | |
| EP3118152B1 (de) | Verfahren zur geschwindigkeitssteuerung eines kommissionierflurförderzeugs | |
| DE10305900B4 (de) | Stapler | |
| DE102004027446B4 (de) | Vorrichtung zur Unterstützung des Ein- und Ausstapelns bei einem Stapler | |
| EP3118706B1 (de) | Verfahren zur steuerung eines kommissionierflurförderzeugs | |
| EP3216744A1 (de) | Verfahren zur steuerung eines flurförderzeugs beim kommissionieren | |
| EP3153348B1 (de) | Lastentransportfahrzeug mit überwachungsmitteln zur gesicherten handhabung eines wechselbehälters | |
| DE102015113445A1 (de) | Verfahren zur Geschwindigkeitssteuerung eines Kommissionierflurförderzeugs | |
| EP3947246B1 (de) | Verfahren zur lagerungsunterstützung bei einem flurförderzeug und flurförderzeug | |
| DE102005043781A1 (de) | Flurförderzeug mit einem im Bereich eines Hubgerüsts angeordneten Umgebungssensor | |
| DE102017220359A1 (de) | Flurförderzeug mit an heb- und senkbaren Lastaufnahmemitteln angeordneten Kameras | |
| EP3514103B1 (de) | Flurförderzeug | |
| DE102019113606A1 (de) | Flurförderzeug mit Kamerasystem | |
| DE102013112016B4 (de) | Flurförderzeug mit einem Hubhöhenassistenzsystem | |
| EP3020677A1 (de) | Verfahren zur hubhöhenvorwahl bei einem flurförderzeug | |
| EP3770107B1 (de) | Flurförderzeug mit einer assistenzeinrichtung | |
| DE102021211707A1 (de) | Verfahren zum Steuern einer eine Lasthandhabungseinheit mit einer Kameraeinheit umfassenden mobilen Arbeitsmaschine | |
| EP3118707B1 (de) | Verfahren zur fahrsteuerung eines kommissionierflurförderzeug |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| 17P | Request for examination filed |
Effective date: 20140404 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20141030 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502013000485 Country of ref document: DE Effective date: 20150507 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 717758 Country of ref document: AT Kind code of ref document: T Effective date: 20150515 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150626 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150727 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150725 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502013000485 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20151231 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150526 |
|
| 26N | No opposition filed |
Effective date: 20160105 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150405 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502013000485 Country of ref document: DE Representative=s name: PATENTSHIP PATENTANWALTSGESELLSCHAFT MBH, DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160430 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160430 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502013000485 Country of ref document: DE Representative=s name: PATENTSHIP PATENTANWALTSGESELLSCHAFT MBH, DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20130405 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150625 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150405 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20170405 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170405 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150325 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 717758 Country of ref document: AT Kind code of ref document: T Effective date: 20180405 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180405 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230518 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250417 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20250430 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20250423 Year of fee payment: 13 |