EP2586959A1 - Sicherungsvorrichtung, Schließvorrichtung und Auswerteeinheit - Google Patents
Sicherungsvorrichtung, Schließvorrichtung und Auswerteeinheit Download PDFInfo
- Publication number
- EP2586959A1 EP2586959A1 EP11008656.8A EP11008656A EP2586959A1 EP 2586959 A1 EP2586959 A1 EP 2586959A1 EP 11008656 A EP11008656 A EP 11008656A EP 2586959 A1 EP2586959 A1 EP 2586959A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- movement
- sensors
- evaluation unit
- sensor
- safety device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000011156 evaluation Methods 0.000 title claims abstract description 56
- 230000033001 locomotion Effects 0.000 claims abstract description 127
- 239000013598 vector Substances 0.000 claims abstract description 59
- 230000004888 barrier function Effects 0.000 claims abstract description 56
- 238000001514 detection method Methods 0.000 claims abstract description 13
- 230000005855 radiation Effects 0.000 claims abstract 2
- 230000006870 function Effects 0.000 claims description 11
- 238000013507 mapping Methods 0.000 claims description 10
- 238000011161 development Methods 0.000 description 6
- 230000001105 regulatory effect Effects 0.000 description 3
- 230000000052 comparative effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000007620 mathematical function Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000011888 foil Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000009420 retrofitting Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/80—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling
- E06B9/82—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling automatic
- E06B9/88—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling automatic for limiting unrolling
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/42—Detection using safety edges
- E05F15/43—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound
- E05F2015/434—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound with cameras or optical sensors
- E05F2015/435—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound with cameras or optical sensors by interruption of the beam
- E05F2015/436—Detection using safety edges responsive to disruption of energy beams, e.g. light or sound with cameras or optical sensors by interruption of the beam the beam being parallel to the wing edge
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/10—Application of doors, windows, wings or fittings thereof for buildings or parts thereof
- E05Y2900/106—Application of doors, windows, wings or fittings thereof for buildings or parts thereof for garages
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/68—Operating devices or mechanisms, e.g. with electric drive
- E06B2009/6809—Control
- E06B2009/6818—Control using sensors
- E06B2009/6827—Control using sensors sensing light
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/68—Operating devices or mechanisms, e.g. with electric drive
- E06B2009/6809—Control
- E06B2009/6818—Control using sensors
- E06B2009/6836—Control using sensors sensing obstacle
Definitions
- the invention relates to a safety device for securing a movable, guided movement element against unwanted collisions according to the preamble of claim 1 and a locking device according to the preamble of claim 14 and an evaluation unit according to the preamble of claim 15.
- an electronic unit determines the time difference from the first to the second light barrier by triggering these light barriers a time at which a subsequent, third light barrier would be detected, and switches in good time before this event occurs, the third light barrier in the measurement state.
- the object of the invention is to propose a safety device or a locking device, which allows in an improved manner to detect a risk of collision during movement of the moving element.
- the securing device according to the invention for securing a movable, guided movement element against unwanted collisions with an object lying on a movement path of the movement element comprises at least two sensors for detecting the object or the movement element and for outputting signals as a function of the detection. Furthermore, the security device according to the invention comprises an evaluation unit for evaluating signals from the sensors and for generating a shutdown signal based on the evaluation.
- Goals or doors, foil doors, swing gates, roller doors, telescope doors or the like come into consideration as a movement element. If necessary, parts of a closing device that are moved during the movement of the moving element may also belong to the moving element.
- the securing device serves to avoid unwanted collisions during the movement of the moving element. If the movement element, such as a gate, closed, it may happen, for example, that a person, an object or any other object enters the range of motion of the movement element. Without any securing device, the object could in principle be grasped or clamped by the movement element in such a case. Such accidents should be avoided.
- the evaluation unit of the safety device detects signals from the sensors and evaluates them, for example by a corresponding electronics. This detection can be carried out in the simplest way, that the evaluation unit is connected to the respective outputs of the sensors or wired.
- the sensors basically serve to detect an object, that is one Object or a person who enters the movement space of the movement element.
- the movement space is the space which is either passed directly by the movement element during the movement of the movement element, or an area which lies in the immediate vicinity of this zone passed by the movement element and thus to a certain extent constitutes a danger zone. An object which is thus located in this danger area may possibly cause a collision with the movement element, for example because of its spatial extent.
- this movement space or at least part of this movement space is monitored by the securing device or the sensors, so that the risk of a collision can be reduced or even eliminated altogether.
- the sensors are also arranged or designed such that the movement element can be detected.
- the sensors may, for example, be mounted in the guide rail, in which the corresponding movement element is guided and moved. It is also conceivable that the light barriers are arranged laterally offset from the guide rail, e.g. arranged parallel to the guide rail.
- the moving element is designed or arranged such that it is detected by the sensors during its guided movement, for example by the moving element penetrating into the detection area of the sensor. Among other things, this z. B. be used to determine the position of the moving element or a portion of thefroselemenzes by the sensors.
- the sensors are further adapted to output signals which, among other things, carry at least the information as to whether the sensor detects an object, a person or the like or not.
- the signal can accordingly carry the information as to whether the light barrier is interrupted or not.
- the corresponding signals are transferred to the evaluation unit or detected by the latter.
- the securing device according to the invention offers a particularly advantageous measure, characterized in that, as soon as the sensor detects something, it can be distinguished whether it is an object and if there is a risk of collision or if it is the moving element itself, which in its movement from the sensor was recorded.
- the invention makes use of the insight that the distinction between the movement element and the object that could cause a collision can be found by the stationary analysis of the signal state even without a consideration of a time course.
- those signal images which correspond to the detection of an object can be defined in advance. The determination as to whether an object is detected is then made by comparison with the defined signal images.
- the security device is characterized in that the evaluation unit is designed to detect from the at least two sensors a currently detected state vector from a set of state vectors, which unambiguously comprise all possible combinations of the signals of the sensors, and in the case of predetermined state vectors, the shutdown signal to generate.
- a state vector in the sense of the invention comprises individual information or information contents of the signals of the sensors.
- the state vector is designed such that this information or information contents can be assigned to the individual sensors.
- the information or information contents may in particular include the information as to whether the sensor detects something (an object / a person or the movement element) or not.
- the entirety of the signals of all outputs of the sensors can be viewed.
- the information consists of a digital signal, ie 0 or 1; If, for example, a voltage is present at the output of the sensor, something is detected by the sensor and vice versa.
- the state vector can be designed in various ways. It is conceivable on the one hand that a memory unit, e.g. a register bank is provided, whereby each register can be assigned a corresponding sensor. It is also conceivable that only electrical lines are available, each of which can be assigned to a sensor.
- the information both about the detection of the sensor and about which sensor it is, can also be encoded in some other way, for example by a numerical code, by assigning different numerical values to certain sensors with specific states. On the assignment, which sensor has supplied which signal or which information, it is then also known where the sensor is arranged or which position it has.
- the evaluation unit detects the state vector, i.
- the outputs of the sensors are connected to the evaluation unit.
- the set of all possible state vectors thus unambiguously includes all possible combinations of the signals of the sensors. In particular, it can be clearly identified or deduced from the state vector which sensor detects something or not.
- the state vectors can be repeated, for example, periodically, but in principle also continuously detected.
- the currently detected state vector is the state vector that is used to determine whether or not there is a danger of collision right now or in some current time span.
- the safety device comprises sensors which can detect both the movement element and an object.
- the evaluation unit only evaluates the information from the state vector whether an object has been detected by a sensor or not and which sensor it is in each case.
- Each individual piece of information of a single sensor in itself contains only the information, whether in principle of the respective sensor something is detected or not.
- This single information does not yet permit the conclusion as to whether the detected object is the moving element or an object that could cause a collision. But this conclusion can be drawn from the totality of this information of all signals.
- the movement element for example, during its movement successively cover one sensor after another and thus be detected by these sensors each. During the movement of the movement element, therefore, a characteristic "pattern" is generated which sensors detect something and which are not.
- the evaluation unit If the signals of the sensors deviate from these possible patterns, an object has regularly entered the movement space and there is a danger of collision; then the evaluation unit generates a shutdown signal. Accordingly, all state vectors are known in principle, which mean that either nothing is detected or the motion element is detected or an object with the risk of collision is detected. Consequently, the shutdown signal is generated at the corresponding predetermined state vectors.
- the signals of the sensors can be evaluated, for example, by a logic circuit or by a multiplexer, in particular if digital signals are available as signals.
- the decision as to whether a shutdown signal is generated, that is, whether a predetermined state vector is present, can be made by either addressing certain fixed output lines of the logic circuit or of the multiplexer.
- the predetermined state vectors are ready for comparison.
- the state vectors can also be present as numerical values which are buffer-stored in a register, wherein the predetermined state vectors are stored in a further memory and then a comparison is made.
- a digital comparison by logical switching elements.
- the securing device according to the invention is advantageously used not only in the dynamic case, ie during the movement of the moving element, but also in the static case, when, for example, the gate is turned on again, the gate fully extended., Completely retracted or in an intermediate state can be located.
- the security device is in particular hardly prone to error and allows a particularly high level of security, since the actual sensor state is always checked in detail. In addition, sensors do not have to be activated or deactivated.
- the securing device according to the invention also has the advantage that virtually no structural changes have to be made to a corresponding closing device on a gate, etc., e.g. in the sense of attaching special reflection flags. It therefore allows a particularly good retrofitting.
- a detected state vector may also be stored at least temporarily to be used for later comparison with the current state vector. It is conceivable caching in a register, other use of flip-flop circuits or the like. This measure is also advantageous if, for example, there is a state vector during the movement of the movement element and therefore it is known which state vector should be present next. By this measure, therefore, the safety and reliability of the device can be increased again. If necessary, for example, in the case of a gate in which a so-called "blowout" is possible (for example in the case of the film gate), a distinction can be made even more reliably between a blowout case and a danger of collision by an object.
- the time during the movement of the moving element can be recorded by a timer. Based on this information can be closed, for example, which state vector should be present. It is also conceivable, on the basis of this time, to select individual predetermined state vectors which can be used for a comparison or for the decision as to whether the shutdown signal is generated.
- safety can be increased, for example in the case of a telescopic door, since in such a door gate elements can swing out after a certain time and can no longer be detected by the sensors.
- this case can also be used for a blowout detection, since in the case of a "blowout" the movement element is partially out of the guide and, for example, is no longer detected at this point.
- the evaluation unit is designed to assign each state vector unambiguously exactly one state information from a predetermined target quantity via a bijective mapping from a set of state vectors which comprise the signals of the respective sensors individually as a function of their position, and in the case predetermined state information to generate the shutdown signal.
- the evaluation unit uniquely assigns exactly one state information to each state vector.
- the state information may be, for example, a specific signal. It can be e.g. to act as an electrical or optical signal.
- the state information can also consist of a numerical value.
- the target set consists of all possible or possible state information that can be assigned to the state vectors. Any state information is an element of the target set.
- the target set does not include any elements that can not be assigned to a state vector. Accordingly, the set of state vectors can again have as many elements as there are conceivable states of the sensors.
- a fuse device includes n photoelectric sensors (n: natural number, n> 0), each as signals 0 or 1 (not interrupted or interrupted) output, the set of all possible state vectors comprises 2 n (2 high n) elements. Then, the target amount also includes 2 n (2 high n) elements.
- This illustration is bijective, meaning that it is both injective and surjective.
- Injectivity means that no value of the target set is assigned to several elements of the set of state vectors.
- Surjectivity means that each value of the target quantity is also assigned to an element of the set of state vectors.
- the evaluation unit comprises a multiplexer which has a plurality of inputs and, depending on which inputs are addressed or signals are received, responds to different outputs or outputs signals via different outputs.
- the associated inputs of the multiplexer together then correspond to the state vector.
- a logic circuit which receives the states of the individual sensors via associated signal inputs and logically linked so that only in the case of predefined signal pattern, a corresponding control signal, in particular a shutdown signal is output.
- State information that can be output is known. Some of them are predetermined in the case of regular operation, others in the event of a breakdown or collision hazard. In regular operation, ie, the moving element is moved without an object penetrates into the movement space during this time or there is some other disturbance, certain predetermined state information occurs. If another status information is output, then there is no regular operation: The movement element is to be stopped.
- the evaluation unit is designed to assign the sensors in each case a numerical value as a function of their position and their signal and to assemble the state vector from these numerical values.
- a microcontroller or a processor can be used as an evaluation unit.
- the corresponding mathematical operation can be carried out by a simple programming of the microcontroller or processor.
- the signals are used to perform a mathematical operation that results in a single numerical value or result value.
- the mathematical operation represents a bijective mapping.
- Each element of the definition set is assigned an element of the target set by the mathematical operation, ie the mapping. All numerical values thus obtained, which are assigned to state vectors by the bijective mapping, together form the target quantity.
- the result value effectively represents an encoding, which sensor detects something and which does not, it can also be deduced from this information whether the object or the movement element is detected. If only the movement element was detected, then during movement of the Movement element these continue, because in principle no risk of collision is to be feared. However, if exclusively or additionally an object is detected, then in fact this risk of collision is to be feared and the movement of the movement element is to be stopped.
- an addition may be provided in an embodiment of the invention.
- Such a mathematical function is usually provided by most commercially available processors / microcontrollers.
- processors / microcontrollers In addition, such a microcontroller or processor enables rapid signal processing.
- the predetermined state information can be stored as comparative numbers in a comparison table, which are stored in a memory unit such as a register bank or an EEPROM (electrically erasable programmable read-only memory). Subsequently, the numerical values / result values are compared with the comparative figures. If the result values are one of the comparison values, then e.g. a regular case, otherwise a shutdown signal is generated. It is also conceivable, in principle, to store only comparison values which correspond to a non-regular operation, so that a shutdown signal is generated if they match.
- the evaluation of the result value can be done not only by specifying a comparison table and performing a numerical comparison, but also by programming another mathematical operation (eg, a mathematical function, logic gates (English: AND, OR, NAND, NOR or combinations thereof) or the like So that, if corresponding result values are available, the movement can be continued or stopped
- another mathematical operation eg, a mathematical function, logic gates (English: AND, OR, NAND, NOR or combinations thereof) or the like
- Such electronic components such as microcontrollers, as well as corresponding memory elements and registers can usually be purchased inexpensively Memory requirement for a corresponding comparison table also be so low that the memory or register of a commercial microcontroller for this purpose are quite sufficient. Therefore, a cost-effective production can be made possible.
- a microcontroller can also be reprogrammed in a simple manner, if, for example, additional sensors are to be retrofitted.
- the evaluation unit can, for example, perform the assignment of numerical values inter alia as a function of the respective sensor. In a development of the invention, this assignment can in particular be made such that, depending on the position of the individual sensors, fundamentally different numbers are assigned. For example, if there are N sensors in total (where N ⁇ 2 and N is a natural number). The N sensors can be counted individually, for example. The order of counting, for example, done so that after starting the movement of a moving element in the open state of the moving element, the sensors are counted in the order as they are passed by the moving element after each other.
- the safety of the security device can be increased in particular by additionally assigning to the signals and / or result values a time value which corresponds to the time of detection.
- the timer may begin to run when the motion element is activated.
- the timer can then be stopped, even if the movement of the moving element is stopped.
- the timer keeps track of the amount of time that has already passed during the movement of the moving element.
- the timer measures the time of movement of the movement element.
- the evaluation unit determines, based on the time determined by the timer, a desired position of the movement element at which the movement element would have to be in regular operation. This information can for example be compared with the information which photocells are currently interrupted or not. If, for example, a light barrier is interrupted, which still can not have happened at all by the movement element, then the detected object can only be an object, and not the movement element. So there is a risk of collision. It will then generate a shutdown signal.
- the evaluation unit may be designed to determine, based on the desired position, which sensors should be interrupted and released again as a result of the movement of the movement element, and accordingly calculate a desired value resulting from the signals by means of the mathematical operation would result in the sensors passing during normal operation. Accordingly, in an advantageous development of the invention, the evaluation unit is designed to compare the result value with the desired value. Accordingly, it may be particularly advantageous to design the evaluation unit in such a way that, based on the desired position, it is determined which sensors should have detected the movement element as a result of the movement of the moving element. By means of the mathematical operation, a setpoint value is calculated, which would result from the signals of the light barriers interrupted during normal operation if, for example, photoelectric sensors are present as sensors.
- the evaluation unit can thus be designed, for example, to carry out a countercheck. Due to the time determined by the timer, which has elapsed during the movement of the movement element, for example, a certain number of light barriers would have already happened and thus be interrupted. Furthermore, therefore, a certain result value would have to exist, a so-called setpoint. This setpoint is compared with the actually determined result value. If the values do not match, then there is no regular operation. If necessary, the movement element must be stopped. It is conceivable, for example, that an object is detected by a light barrier and therefore results in a deviation in the result value from the desired value. In principle, it is therefore also possible to detect whether there is another fault. For example, it could be that the speed of the moving element does not correspond to the speed required during regular operation. Thus, the moving element has passed too few or too many light barriers. Optionally, in this case, a stop of the movement element by a corresponding switch-off signal.
- a telescopic moving element has at least two elements, which are guided in parallel rails. When fully opened, the elements are perpendicular to the closing plane at the edge of the corresponding opening during the closing process or the movement is at least one element in motion. When the closing operation is completed, the elements are arranged next to each other. For example, move the individual elements so that when the door is open, the sensors are first passed one after the other until about half of the door opening is reached. Subsequently, the detection ends by the sensor first passed, and so one sensor after another is "released" in the same order at times.
- the sensors can be designed, for example, as light barriers. It is also conceivable, however, to use a time-of-flight (abbreviation: TOF) sensor.
- TOF time-of-flight
- a TOF sensor advantageously also enables a distance or position determination of a detected object.
- the sensors can be arranged in a preferred development of the invention parallel to the direction of movement of the moving element, further in particular so that they lie in the plane of movement of the moving element.
- the parallel arrangement along the direction of movement allows successively one sensor after another to detect the moving moving element.
- the arrangement in the plane of motion allows the movement space in which a risk of collision could exist to be monitored as completely as possible.
- the sensors may further be arranged perpendicular to the direction of movement, e.g. to evenly scrape the movement space.
- the evaluation unit can also be designed to interrupt the movement of the movement element.
- a corresponding switching unit, a contactor or a relay or the like may be integrated into the evaluation unit. It is conceivable to integrate the control and / or regulation of the movement element in the evaluation unit to a compact unit as possible.
- the evaluation unit can therefore also be designed as a control unit for checking, ie for controlling and / or regulating the movement, the movement element.
- the control unit can also be designed to receive a command from a user to close the gate or the To interrupt movement of the gate. Such a command can be issued, for example via a control panel, a remote control, optionally acoustically or in any other way.
- the evaluation unit can repeatedly detect the state vectors continuously or at intervals, in particular also periodically.
- a closing device with a movable, guided moving element and a securing device is characterized in that a securing device according to the invention or an embodiment of the invention is used.
- the movement element is designed as a gate. At least one of the sensors is arranged so that the movement element can be detected by the sensor.
- the evaluation unit can also be designed as a control unit for checking the movement of the movement element.
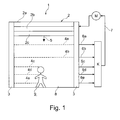
- FIG. 1 shows a closing device 1 with a gate 2, which consists of individual gate elements 2a, 2b and 2c.
- the gate two or the individual elements 2a, 2b, 2c are guided in guide rails 3.
- In the guide of the guide rails 3 are light barriers 4a, 4b, 4c, 4d, 4e, wherein the individual optical Pfande are shown as dashed lines.
- In the drawing are in the left guide rail of the guide 3, the transmitter of the light barriers 4a to 4e and in the right guide rail, the corresponding receiver.
- the direction of movement when closing the door 2 is shown by an arrow 5.
- the movement of the gate 2 is carried out by a drive motor M, which in turn is controlled or regulated by a control unit K.
- the individual receivers of the light barriers 4a to 4e are connected to the control unit K via the corresponding lines 6a, 6b, 6c, 6d, 6e.
- the output of the control unit K is in turn connected to the motor M, which is controlled or regulated via this output 7.
- the closing plane in which the door 2 moves between the two guide rails of the guide 3 is identified by the reference numeral 8.
- a person 9 In this level or in the movement space of the gate 2 is currently in the FIG. 1 a person 9. This person 9 interrupts the photocells 4c, 4d and 4e. The light barriers 4a and 4b are not interrupted.
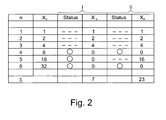
- FIG. 2 a corresponding comparison table is shown.
- the photocell is not interrupted (indicated by the "o" symbol in the "Status” column)
- the gate is set in motion in the open state, it first interrupts the first, then the second, then the third light barrier etc.
- Case I (see columns 3 - 4 in FIG. 2 ): There are three light barriers interrupted; In the present case, the value 1 is assigned to the first light barrier, the value 2 to the second light barrier, and the value 4 to the third light barrier. The remaining photocells are each assigned the value 0.
- the result value (sum) is 7.
- the value 7 is included because the comparison table contains all the values that can be formed when the series after 1 to a maximum of N light barriers is interrupted / are. The comparison table thus contains the values 1, 3, 7, 15, 31, 63.
- the result value 7 means that the first three light barriers are interrupted.
- Case II shows that the photocells 1, 2, 3 and 5 are interrupted. This case II can not correspond to a movement of the gate, because otherwise the gate would have to have an interruption in the area of the fourth light barrier, which would have to allow the light beam of the light barrier to pass. The interruption of the fifth light barrier is therefore carried out an object that can cause a collision and thus the control unit must stop the movement of the door.
- the result is 23, which is not included in the comparison table. This leads to a corresponding interruption. Since this mapping is advantageously bijective, a corresponding state can be clearly assigned to the result values. The control unit can thus infer whether an interruption is necessary or not.
- the present exemplary embodiment can once again be improved by running a pointer.
- the gate could actually have passed the light barriers 1 and 2 and the remaining light barriers would actually have to be opened.
- FIG. 3 shows an embodiment in which a so-called "blow-out effect” takes place.
- This may be the case in particular with so-called film doors.
- Such film doors are guided so that at a corresponding gust of wind or a gust, which could lead to damage to the gate as a result of the large force against the gate, that the gate at the corresponding point at which the force is too large, from the leadership slips out. The force is reduced, and there is no damage to the gate.
- the present embodiment makes it possible to distinguish whether an object has entered the movement space or whether such a so-called "blow-out effect" took place.
- the time is tracked by a timer.
- the first two columns of the table show a case in which the gate has passed the first three light barriers, at time t-1.
- the value 7 (sum) contained in the comparison table is correctly stated at time t-1. If the result value still has the value 7 at time t, this means that the gate has been stopped.
- Case II in FIG. 3 : In case II, the gate did not move further after passing the third light barrier, but an object has penetrated that the fifth light barrier passes. If the gate had moved further, the result value 15 would have been expected at time t, as already mentioned in the first case. By interrupting the light barrier 5, however, the value 23 (sum) is now available as a result value. This is greater than the expected result value and therefore means an interruption by an object. The gate must be stopped.
- Case III indicates a "blow-out” case.
- the gate has moved and meanwhile the fourth light barrier has happened.
- the result value is not 15, as would be the case with regular operation, but only 13, since a gust of wind has spoiled the guidance in the area of the second light barrier (so-called "blow-out”).
- the light barrier 2 is therefore no longer interrupted. In such a case, it may therefore no longer be an interruption of a light barrier by an object at the time t.
- a light barrier is set in motion again, which has already been interrupted by the gate and thus should basically continue to be interrupted. Therefore If the sum is smaller than the expected result value, namely the desired value 15.
- the comparison table is therefore designed so that, depending on elapsed time during the movement of the gate thus initially, in the case according to FIG. 2 the comparison table can take the values 0, 1, 3, 7 and 15. Subsequently, however, the comparison table does not assume the value 31 but the value 30, since the first light barrier is opened again. The next value is 60 because the first and second photocells are opened, that is, 63 - 1 - 2. Accordingly, the next value of the comparison table is 120. If these values deviate at the appropriate times, this means that either one object has penetrated, which is the case when the result values are greater than the reference values of the comparison table at the respective times. In principle, if the time information were not available, it could also be a so-called "blow-out case" if the value is smaller than the setpoint value.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Power-Operated Mechanisms For Wings (AREA)
- Operating, Guiding And Securing Of Roll- Type Closing Members (AREA)
- Geophysics And Detection Of Objects (AREA)
Abstract
Description
- Die Erfindung betrifft eine Sicherungsvorrichtung zur Absicherung eines bewegbaren, geführten Bewegungselementes gegen ungewollte Kollisionen nach dem Oberbegriff des Anspruchs 1 sowie eine Schließvorrichtung nach dem Oberbegriff des Anspruchs 14 sowie eine Auswerteeinheit nach dem Oberbegriff des Anspruchs 15.
- Aus dem Stand der Technik ist beispielsweise aus der
EP 1 841 942 B1 eine Vorrichtung zur Absicherung eines angetriebenen Bewegungselements bekannt. Bei dieser Vorrichtung ermittelt eine Elektronikeinheit aus der Zeitdifferenz von der ersten zur zweiten Lichtschranke durch Auslösen dieser Lichtschranken eine Zeit, zu welcher eine nachfolgende, dritte Lichtschranke erfasst werden würde, und schaltet rechtzeitig, bevor dieses Ereignis eintritt, die dritte Lichtschranke in den Messzustand. - Aufgabe der Erfindung ist es, eine Sicherungsvorrichtung bzw. eine Schließvorrichtung vorzuschlagen, welche in verbesserter Weise ermöglicht, eine Kollisionsgefahr bei Bewegung des Bewegungselementes zu erkennen.
- Die Aufgabe wird, ausgehend von einer Sicherungsvorrichtung bzw. einer Schließvorrichtung der eingangs genannten Art, durch die kennzeichnenden Merkmale des Anspruchs 1, des Anspruchs 14 sowie des Anspruchs 15 gelöst.
- Durch die in den abhängigen Ansprüchen genannten Maßnahmen sind vorteilhafte Ausführungen und Weiterbildung der Erfindung möglich.
- Die erfindungsgemäße Sicherungsvorrichtung zur Absicherung eines bewegbaren, geführten Bewegungselementes gegen ungewollte Kollisionen mit einem auf einem Bewegungsweg des Bewegungselementes liegenden Objekt umfasst wenigstens zwei Sensoren zur Detektion des Objektes bzw. des Bewegungselementes und zur Ausgabe von Signalen in Abhängigkeit von der Detektion. Ferner umfasst die erfindungsgemäße Sicherungsvorrichtung eine Auswerteeinheit zur Auswertung von Signalen der Sensoren und zur Generierung eines Abschaltsignals anhand der Auswertung.
- Als Bewegungselement kommen insbesondere Tore oder Türen, Folientore, Schwenktore, Rolltore, Teleskoptore oder dergleichen in Betracht. Zum Bewegungselement können gegebenenfalls auch Teile einer Schließvorrichtung gehören, welche bei der Bewegung des Bewegungselementes mitbewegt werden.
- Grundsätzlich dient die erfindungsgemäße Sicherungsvorrichtung dazu, ungewollte Kollisionen bei der Bewegung des Bewegungselementes zu vermeiden. Wird das Bewegungselement, etwa ein Tor, geschlossen, kann es beispielsweise vorkommen, dass eine Person, ein Gegenstand oder ein sonstiges Objekt in den Bewegungsraum des Bewegungselementes eintritt. Ohne jegliche Sicherungsvorrichtung könnte grundsätzlich in einem solchen Fall das Objekt vom Bewegungselement erfasst bzw. eingeklemmt werden. Derartige Unfälle sollen vermieden werden können.
- Die Auswerteeinheit der erfindungsgemäßen Sicherungsvorrichtung erfasst Signale der Sensoren und wertet diese aus, z.B. durch eine entsprechende Elektronik. Diese Erfassung kann in einfachster Weise dadurch erfolgen, dass die Auswerteeinheit mit den jeweiligen Ausgängen der Sensoren verbunden bzw. verdrahtet ist. Die Sensoren dienen grundsätzlich der Detektion eines Objekts, das heißt eines Gegenstandes oder einer Person, die in den Bewegungsraum des Bewegungselementes eintritt. Bei dem Bewegungsraum handelt es sich um den Raum, der entweder unmittelbar bei der Bewegung des Bewegungselementes vom Bewegungselement passiert wird, oder um einen Bereich, der in der unmittelbaren Umgebung dieser vom Bewegungselement passierten Zone liegt und somit gewissermaßen einen Gefahrenbereich darstellt. Ein Gegenstand, der sich also in diesem Gefahrenbereich befindet, kann beispielsweise aufgrund seiner räumlichen Ausdehnung möglicherweise eine Kollision mit dem Bewegungselement hervorrufen. In der Regel wird dieser Bewegungsraum oder wenigstens ein Teil dieses Bewegungsraumes von der Sicherungsvorrichtung bzw. den Sensoren überwacht, sodass die Gefahr einer Kollision verringert bzw. sogar gänzlich ausgeschlossen werden kann.
- Die Sensoren sind zudem so angeordnet bzw. ausgebildet, dass das Bewegungselement detektiert werde kann. Die Sensoren können beispielsweise in der Führungsschiene angebracht sein, in der das entsprechende Bewegungselement geführt und bewegt wird. Denkbar ist weiterhin, dass die Lichtschranken seitlich versetzt zur Führungsschiene angeordnet sind, z.B. parallel zur Führungsschiene angeordnet. Mitunter ist das Bewegungselement so ausgebildet bzw. angeordnet, dass es bei seiner geführten Bewegung von den Sensoren erfasst wird, indem zum Beispiel das Bewegungselement in den Detekzionsbereich des Sensors eindringt. Unter anderem kann dies z. B. dazu ausgenutzt werden, die Position des Bewegungselementes bzw. des einen Abschnitts des Bewegungselemenzes durch die Sensoren zu bestimmen.
- Die Sensoren sind ferner dazu ausgebildez, Signale auszugeben, die unter anderem wenigstens die Information tragen, ob der Sensor ein Objekt, eine Person oder Ähnliches detektiert oder nicht. Im Falle einer einfachen Lichtschranke kann das Signal dementsprechend die Information tragen, ob die Lichtschranke unterbrochen ist oder nicht. Die entsprechenden Signale werden an die Auswerteeinheit übergeben bzw. von dieser erfasst.
- Die erfindungsgemäße Sicherungsvorrichtung bietet dabei eine besonders vorteilhafte Maßnahme, dadurch dass, sobald der Sensor etwas detektiert, unterschieden werden kann, ob es sich um ein Objekt handelt und gegebenenfalls Kollisionsgefahr besteht oder ob es sich um das Bewegungselement selbst handelt, welches bei seiner Bewegung vom Sensor erfasst wurde.
- Die Erfindung nutzt die Erkenntnis, dass die Unterscheidung von Bewegungselement und Objekt, das eine Kollision hervorrufen könnte, durch die stationäre Analyse des Signalzustandes auch ohne Betrachtung eines zeitlichen Verlaufs gefunden werden kann. Dazu können diejenigen Signalbilder, die der Detektion eines Objektes entsprechen, vorab definiert werden. Die Feststellung, ob ein Objekt detektiert ist, erfolgt dann durch Vergleich mit den definierten Signalbildern.
- Dementsprechend zeichnet sich die erfindungsgemäße Sicherungsvorrichtung dadurch aus, die Auswerteeinheit dazu ausgebildet ist, von den wenigstens zwei Sensoren einen aktuell detektierten Zustandsvektor aus einer Menge an Zustandsvektoren, welche eindeutig alle möglichen Kombinationen der Signale der Sensoren umfassen, zu erfassen und im Falle vorbestimmter Zustandsvektoren das Abschaltsignal zu generieren.
- Ein Zustandsvektor umfasst im Sinne der Erfindung einzelne Informationen bzw. Informationsgehalte der Signale der Sensoren. Der Zustandsvektor ist so ausgebildet, dass diese Informationen oder Informationsgehalte den einzelnen Sensoren zugeordnet werden können. Die Informationen bzw. Informationsgehalte können insbesondere die Information umfassen, ob der Sensor etwas (ein Objekt / eine Person oder das Bewegungselement) detektiert oder nicht. Beispielsweise kann als Zustandsvektor die Gesamtheit der Signale aller Ausgänge der Sensoren angesehen werden. Im einfachsten Fall besteht die Information aus einem digitalen Signal, d.h. 0 oder 1; liegt z.B. eine Spannung am Ausgang des Sensors an, wird von Sensor etwas detektiert und umgekehrt.
- Der Zustandsvektor kann in verschiedenster Weise ausgebildet sein. Denkbar ist zum einen, dass eine Speichereinheit, z.B. eine Registerbank, vorgesehen ist, wobei jedem Register ein entsprechender Sensor zugeordnez werden kann. Denkbar ist auch, dass lediglich elektrische Leitungen vorhanden sind, die sich jeweils einem Sensor zuordnen lassen. Die Informationen, sowohl über die Detektion des Sensors als auch darüber, um welchen Sensor es sich handelt, können auch in sonstiger Weise codiert vorliegen, etwa durch einen Zahlencode, indem bestimmten Sensoren mit bestimmten Zuständen unterschiedliche Zahlenwerte zugeordnet werden. Über die Zuordnung, welcher Sensor welches Signal bzw. welche Information geliefert hat, ist dann auch bekannt, wo der Sensor angeordnet ist bzw. welche Position er besitzt.
- Die Auswerteeinheit erfasst den Zustandsvektor, d.h. im einfachsten Fall sind die Ausgänge der Sensoren mit der Auswerteeinheit verbunden. Die Menge aller möglichen Zustandsvektoren umfasst also in eindeutiger Weise alle möglichen Kombinationen der Signale der Sensoren. Aus dem Zustandsvektor ist insbesondere eindeutig erkennbar bzw. ableitbar, welcher Sensor etwas detektiert oder nicht.
- Die Zustandsvektoren können wiederholt, beispielsweise periodisch, grundsätzlich aber auch kontinuierlich erfasst werden. Der aktuell detektierte Zustandsvektor ist der Zustandsvektor, der herangezogen wird, um zu bestimmen, ob gerade jetzt oder in einer gewissen aktuellen Zeitspanne eine Kollisionsgefahr besteht oder nicht.
- Die erfindungsgemäße Sicherungsvorrichtung umfasst Sensoren, die sowohl das Bewegungselement als auch ein Objekt erfassen können. Die Auswerteeinheit wertet lediglich die Informationen aus dem Zustandsvektor aus, ob ein Gegenstand von einem Sensor detektiert wurde oder nicht und um welchen Sensor es sich jeweils dabei handelt. Jede einzelne Information eines einzelnen Sensors für sich genommen beinhaltet nur die Information, ob grundsätzlich vom jeweiligen Sensor etwas detektiert wird oder nicht. Diese einzelne Information lässt noch nicht den Schluss zu, ob es sich bei dem detektierten Gegenstand um das Bewegungselement oder ein Objekt handelt, das eine Kollision hervorrufen könnte. Dieser Schluss kann aber aus der Gesamtheit dieser Informationen aller Signale gezogen werden. Das Bewegungselement wird beispielsweise bei seiner Bewegung nacheinander einen Sensor nach dem anderen abdecken und also von diesen Sensoren jeweils detektiert werden. Bei der Bewegung des Bewegungselementes wird also ein charakteristisches "Muster" erzeugt, welche Sensoren etwas detektieren und welche nicht. Weichen die Signale der Sensoren von diesen möglichen Mustern ab, so ist regelmäßig ein Objekt in den Bewegungsraum eingedrungen und es besteht Kollisionsgefahr; sodann erzeugt die Auswerteeinheit ein Abschaltsignal. Es sind dementsprechend alle Zustandsvektoren grundsätzlich bekannt, die bedeuten, dass entweder nichts detektiert wird oder das Bewegungselement detektiert wird oder ein Objekt mit Kollisionsgefahr detektiert wird. Bei den entsprechenden vorbestimmten Zustandsvektoren wird folglich das Abschaltsignal erzeugt.
- Denkbar sind im Allgemeinen verschiedene Fälle einer Auswertung. Die Signale der Sensoren können beispielsweise durch eine logische Schaltung bzw. durch einen Multiplexer ausgewertet werden, insbesondere dann, wenn als Signale digitale Werte zur Verfügung stehen. Die Entscheidung, ob ein Abschaltsignal erzeugt wird, d. h. ob ein vorbestimmter Zustandsvektor vorliegt, kann dadurch getroffen werden, dass entweder bestimmte, fest vorgegebene Ausgangsleitungen der logischen Schaltung bzw. des Multiplexers angesprochen werden. Denkbar ist aber grundsätzlich auch, dass die vorbestimmten Zustandsvektoren zum Vergleich bereit stehen. Beispielsweise können die Zustandsvektoren auch als Zahlenwerte vorliegen, die in einem Register zwischengespeichert werden, wobei in einem weiteren Speicher die vorbestimmten Zustandsvektoren abgespeichert sind und dann ein Vergleich vorgenommen wird. Denkbar ist auch ein digitaler Vergleich durch logische Schaltelemente.
- Die erfindungsgemäße Sicherungsvorrichtung ist in vorteilhafter Weise nicht nur im dynamischen Fall einsetzbar, also während der Bewegung des Bewegungselementes, sondern auch im statischen Fall, wenn zum Beispiel das Tor wieder angeschaltet wird, wobei das Tor vollständig ausgefahren., vollständig eingefahren oder sich in einem Zwischenzustand befinden kann.
- Die Sicherungsvorrichtung ist insbesondere kaum fehleranfällig und ermöglicht eine besonders hohe Sicherheit, da der tatsächliche Sensorzustand im Einzelnen immer überprüft wird. Zudem müssen Sensoren nicht aktiviert oder deaktiviert werden.
- Die erfindungsgemäße Sicherungsvorrichtung besitzt weiterhin den Vorteil, dass praktisch keine baulichen Änderungen an einer entsprechenden Schließvorrichtung an einem Tor usw. vorgenommen werden müssen, z.B. im Sinne einer Anbringung spezieller Reflexionsfahnen. Sie ermöglicht daher eine besonders gute Nachrüstbarkeit.
- Bei einer Ausführungsform der Erfindung kann auch ein detektierter Zustandsvektor wenigstens temporär gespeichert werden, um für einen späteren Vergleich mit dem aktuellen Zustandsvektor verwendet zu werden. Denkbar ist eine Zwischenspeicherung in einem Register, sonstige Verwendung von Flipflop-Schaltungen oder Ähnliches. Diese Maßnahme ist auch dann vorteilhaft, wenn zum Beispiel bei der Bewegung des Bewegungselementes ein Zustandsvektor vorliegt und daher bekannt ist, welcher Zustandsvektor als nächstes vorliegen sollte. Durch diese Maßnahme kann daher die Sicherheit und Zuverlässigkeit der Vorrichtung noch einmal erhöht werden. Gegebenenfalls kann zum Beispiel bei einem Tor, bei dem ein so genannter "Blowout" möglich ist (z.B. beim Folientor), noch zuverlässiger zwischen einem Blowout-Fall und einer Kollisionsgefahr durch ein Objekt unterschieden werden.
- Des Weiteren kann auch die Zeit während der Bewegung des Bewegungselementes durch einen Zeitgeber aufgenommen werden. Anhand dieser Information kann z.B. geschlossen werden, welcher Zustandsvektor gerade vorliegen sollte. Denkbar ist ferner, anhand dieser Zeit einzelne vorbestimmte Zustandsvektoren auszuwählen, die für einen vergleich bzw. für die Entscheidung, ob das Abschaltsignal generiert wird, verwendet werden können. Dadurch kann etwa im Fall eines Teleskop-Tors die Sicherheit erhöht werden, da bei einem solchen Tor nach einer bestimmten Zeit Torelemente ausschwenken können und nicht mehr von den Sensoren detektiert werden. Grundsätzlich kann dieser Fall auch für eine Blowout-Detektion genutzt werden, da im Falle eines "Blowout" das Bewegungselement teilweise aus der Führung gerät und z.B. an dieser Stelle nicht mehr detektiert wird.
- Bei einer Weiterbildung der Erfindung ist die Auswerteeinheit dazu ausgebildet, aus einer Menge an Zustandsvektoren, welche die Signale der jeweiligen Sensoren einzeln in Abhängigkeit von deren Position umfassen, jedem Zustandsvektor eindeutig genau eine Zustandsinformation aus einer vorbestimmten Zielmenge über eine bijektive Abbildung zuzuordnen, und im Falle vorbestimmter Zustandsinformationen das Abschaltsignal zu generieren.
- Durch die Auswerteeinheit wird jedem Zustandsvektor eindeutig genau eine Zustandsinformation zugeordnet. Die Zustandsinformation kann zum Beispiel ein bestimmtes Signal sein. Es kann sich z.B. um ein elektrisches oder optisches Signal handeln. Die Zustandsinformation kann aber auch aus einem Zahlenwert bestehen. Die Zielmenge besteht aus allen möglichen bzw. in Frage kommenden Zustandsinformationen, die den Zustandsvektoren zugeordnet werden können. Jede mögliche Zustandsinformation ist ein Element der Zielmenge. Die Zielmenge umfasst keine Elemente, die nicht einem Zustandsvektor zugeordnet werden können. Die Menge der Zustandsvektoren kann demnach wiederum so viele Elemente aufweisen, wie es denkbare Zustände der Sensoren gibt.
- Umfasst beispielsweise eine Sicherungsvorrichtung n Lichtschranken (n: natürliche Zahl, n > 0), die jeweils als Signale 0 oder 1 (nicht unterbrochen oder unterbrochen) ausgeben, so umfasst die Menge aller möglichen Zustandsvektcren 2n (2 hoch n) Elemente. Sodann umfasst die Zielmenge ebenfalls 2n (2 hoch n) Elemente.
- Diese Abbildung ist bijektiv, dass heißt sie ist sowohl injektiv als auch surjektiv. Injektivität bedeutet, dass kein Wert der Zielmenge mehreren Elementen der aus der Menge der Zustandsvektoren zugeordnet wird. Surjektivität wiederum bedeutet, dass jeder Wert der Zielmenge auch einem Element der aus der Menge der Zustandsvektoren zugeordnet wird. Mathematisch bedeutet dies, dass auch eine Umkehrfunktion existiert. Das heißt, aus der Information, welche Zustandsinformation (Element der Zielmenge) gerade vorliegt, kann eineindeutig geschlossen werden, welcher Zustandsvektor, d.h. welche Kombination von Signalen von welchen Sensoren in die Auswerteeinheit eingegeben wurde.
- Es sind verachiedene Möglichkeiten denkbar, wie eine derartige bijektive Abbildung in der Auswerteeinheit durchgeführt werden kann.
- Unter anderem ist denkbar, dass die Auswerteeinheit einen Multiplexer umfasst, der mehrere Eingänge aufweist und in Abhängigkeit davon, welche Eingänge angesprochen werden bzw. Signale empfangen werden, unterschiedliche Ausgänge anspricht bzw. Signale über unterschiedliche Ausgänge ausgibt. Die zugehörigen Eingänge des Multiplexers zusammen entsprechen dann dem Zustandsvektor.
- So ist auch eine logische Schaltung denkbar, welche die Zustände der einzelnen Sensoren über zugeordnete Signaleingänge aufnimmt und logisch so verknüpft, dass nur im Falle vordefinierter Signalmuster ein entsprechendes Steuersignal, insbesondere ein Abschaltsignal, ausgegeben wird.
- Anhand der Zustandsinformation, die schließlich durch die bijektive Abbildung erhalten wird, ist eindeutig eine weitere Zuordnung möglich. Grundsätzlich sind alle Zustandsinformationen, die ausgegeben werden können, bekannt. Einige davon sind für den Fall eines regulären Betriebs vorbestimmt, andere für den Fall, dass eine Störung bzw. Kollisionsgefahr besteht. Bei regulärem Betrieb, d.h. das Bewegungselement wird bewegt, ohne dass ein Objekt währenddessen in den Bewegungsraum eindringt oder eine sonstige Störung vorliegt, treten gewisse vorbestimmte Zustandsinformationen auf. Wird eine andere Zustandsinformation ausgegeben, so liegt kein regulärer Betrieb vor: Das Bewegungselement ist zu stoppen.
- Bei einer vorteilhaften Ausführungsform der Erfindung ist die Auswerteeinheit dazu ausgebildet, den Sensoren jeweils einen Zahlenwert in Abhängigkeit von deren Position und von deren Signal zuzuordnen und den Zustandsvektor aus diesen Zahlenwerten zusammenzusetzen. Als Auswerteeinheit kann beispielsweise auch ein Mikrocontroller oder ein Prozessor verwendet werden. Die entsprechende mathematische Operation kann durch eine einfache Programmierung des Mikrocontrollers bzw. Prozessors durchgeführt werden.
- Mit den Signalen wird eine mathematische Operation durchgeführt, die zu einem einzigen Zahlenwert bzw. Ergebniswert führt. Die mathematische Operation stellt eine bijektive Abbildung dar. Die Menge aller möglichen Kombinationen von Signalen aller Lichtschranken, welche also in die Auswerteeinheit eingehen können, bildet gewissermaßen die Definitionsmenge der Abbildung. Jedem Element der Definitionsmenge wird ein Element der Zielmenge durch die mathematische Operation, also die Abbildung, zugeordnet. Alle so gewonnenen Zahlenwerte, welche durch die bijektive Abbildung Zustandsvektoren zugeordnet werden, bilden zusammen die Zielmenge.
- Da also der Ergebniswert gewissermaßen eine Codierung darstellt, welcher Sensor etwas detektiert und welcher nicht, lässt sich aus dieser Information auch ableiten, ob das Objekt oder das Bewegungselement detektiert wird. Wurde lediglich das Bewegungselement detektiert, so kann bei Bewegung des Bewegungselementes diese fortgesetzt werden, da grundsätzlich keine Kollisionsgefahr zu befürchten ist. Wird jedoch ausschließlich oder zusätzlich ein Objekt detektiert, so ist tatsächlich diese Kollisionsgefahr zu befürchten und die Bewegung des Bewegungselementes ist zu stoppen.
- Als mathematische Operation kann beispielsweise eine Addition bei einer Ausführungsform der Erfindung vorgesehen sein. Eine solche mathematische Funktion wird in der Regel von den meisten handelsüblichen Prozessoren / Mikrocontrollern zur Verfügung gestellt. Zudem ermöglicht ein derartiger Mikrocontroller bzw. Prozessor eine rasche Signalverarbeitung.
- Um ein Abschaltsignal zu generieren, können bei einer bevorzugten Weiterbildung der Erfindung die vorbestimmten Zustandsinformationen als Vergleichszahlen in einer Vergleichstabelle, welche in einer Speichereinheit wie einer Registerbank oder einem EEPROM (engl.: electrically erasable programmable read-only memory) hinterlegt werden, gespeichert werden. Anschließend werden die Zahlenwerte / Ergebniswerte mit den Vergleichszahlen verglichen. Handelt es sich bei den Ergebniswerten um einen der Vergleichswerte, so liegt z.B. ein regulärer Fall vor, andernfalls wird ein Abschaltsignal generiert. Denkbar ist grundsätzlich auch in umgekehrter Weise, nur Vergleichwerte abzuspeichern, die einem nicht regulären Betrieb entsprechen, sodass bei Übereinstimmung ein Abschaltsignal generiert wird.
- Die Auswertung des Ergebniswertes kann nicht nur durch Vorgabe einer Vergleichstabelle und Durchführung eines Zahlenvergleichs, sondern auch durch Einprogrammierung einer sonstigen mathematischen Operation (z.B. eine mathematische Funktion, logische Gatter (engl.: AND, OR, NAND, NOR oder deren Kombinationen) oder dergleichen erfolgen, sodass dann, wenn entsprechende Ergebniswerte vorliegen, die Bewegung weitergeführt oder gestoppt werden kann. Derartige Elektronikbausteine wie Mikrocontroller, ferner auch entsprechende Speicherelemente und Register können in der Regel kostengünstig erworben werden. Regelmäßig wird der Speicherbedarf für eine entsprechende Vergleichstabelle auch so gering sein, dass die Speicher bzw. Register eines handelsüblichen Mikrocontrollers für diese Zwecke durchaus ausreichend sind. Daher kann auch eine kostengünstige Fertigung ermöglicht werden. In vorteilhafter Weise kann ein solcher Mikrocontroller gegebenenfalls auch in einfacher Weise umprogrammiert werden, falls beispielsweise zusätzliche Sensoren nachträglich eingebaut werden sollen.
- Denkbar ist ferner, jedem Sensor zunächst den Zahlenwert Null zuzuordnen, wenn der Sensor nichts detektiert, z.B. die Lichtschranke nicht unterbrochen ist.
- Die Auswerteeinheit kann beispielsweise die Zuordnung von Zahlenwerten unter anderem in Abhängigkeit vom jeweiligen Sensor durchzuführen. Diese Zuordnung kann bei einer Weiterbildung der Erfindung insbesondere so erfolgen, dass, je nach Position der einzelnen Sensoren, grundsätzlich andere Zahlen zugeordnet werden. Sind insgesamt beispielsweise N Sensoren vorhanden (wobei N ≥ 2 und N eine natürliche Zahl ist). Die N Sensoren können beispielsweise einzeln durchgezählt werden. Die Reihenfolge der Abzählung kann beispielsweise so erfolgen, dass nach Start der Bewegung eines Bewegungselementes im geöffneten Zustand des Bewegungselementes die Sensoren in der Reihenfolge abgezählt werden, wie sie vom Bewegungselement nach einander passiert werden.
- Bei einer vorteilhaften Ausführungsform der Erfindung wird dem n-ten Sensor (wobei n = 1, 2, ... N und wobei n, N: natürliche Zahlen) dann ein Ergebniswert zugeordnet, der als Funktion von n beschrieben werden kann, sofern der n-te Sensor etwas detektiert ist. Andernfalls wird einem Sensor, der nichts detektiert, der Wert Null zugeordnet. Denkbar ist beispielsweise, dem n-ten Sensor den Zahlenwert 2n-1 zuzuordnen. Es ist besonders vorteilhaft, eine Exponentialfunktion zu wählen, weil hierdurch ein stetig wachsender Abstand zwischen den Zahlenwerten, die den einzelnen unterbrochenen Lichtschranken zugeordnet werden können, erreicht wird. Ist ferner als mathematischer Operation eine Addition gewählt, so erleichtert dies, eine bijektive Abbildung zu realisieren, da die so vom regulären Betrieb abweichenden Ergebniswerte sich von denen des nicht-regulären Betriebs unterscheiden.
- Denkbar ist auch, Potenzen zu einer anderen Basis zu wählen, .z.B. zur Basis 3.
- Die Sicherheit der Sicherungsvorrichtung kann insbesondere dadurch erhöht werden, dass den Signalen und oder Ergebniswerten zusätzlich ein Zeitwert zugeordnet wird, der dem Zeitpunkt der Detektion entspricht. Beispielsweise kann der Zeitgeber dann zu laufen beginnen, wenn das Bewegungselement aktiviert wird. Gegebenenfalls kann der Zeitgeber dann gestoppt werden, wenn auch die Bewegung des Bewegungselementes gestoppt wird. Somit verfolgt der zeitgeber gewissermaßen die Zeitspanne mit, die während der Bewegung des Bewegungselementes bereits verstrichen ist. Der Zeitgeber misst dadurch gewissermaßen die Zeit der Bewegung des Bewegungselementes.
- Im Übrigen ist auch denkbar, die Auswerteeinheit dazu auszubilden, anhand der vom Zeitgeber bestimmten Zeit eine Sollposition des Bewegungselementes zu bestimmen, an welcher sich das Bewegungselement bei regulärem Betrieb befinden müsste. Diese Information kann beispielsweise mit der Information abgeglichen werden, welche Lichtschranken gerade unterbrochen sind bzw. nicht. Ist beispielsweise eine Lichtschranke unterbrochen, welche vom Bewegungselement noch gar nicht passiert sein kann, so kann es sich bei dem detektierten Gegenstand lediglich um ein Objekt handeln, und nicht um das Bewegungselement. Es besteht also eine Kollisionsgefahr. Es wird dann eine Abschaltsignal generiert. Die Auswerteeinheit kann dazu ausgebildet sein, anhand der Sollposition zu bestimmen, welche Sensoren infolge der Bewegung des Bewegungselementes unterbrochen und wieder frei sein sollten, und dementsprechend mittels der mathematischen Operation einen Sollwert errechnen, der sich aus den Signalen der bei regulärem Betrieb passierten Sensoren ergeben würde. Dementsprechend ist bei einer vorteilhaften Weiterbildung der Erfindung die Auswerteeinheit dazu ausgebildet, den Ergebniswert mit dem Sollwert zu vergleichen. Dementsprechend kann es besonderes vorteilhaft sein, die Auswerteeinheit so auszubilden, dass anhand der Sollposition bestimmt wird, welche Sensoren in Folge der Bewegung des Bewegungselemenzes das Bewegungselement erfasst haben sollten. Es wird mittels der mathematischen Operation ein Sollwert errechnet, der sich aus den Signalen der bei regulärem Betrieb unterbrochenen Lichtschranken ergeben würde, wenn als Sensoren z.B. Lichtschranken vorhanden sind. Die Auswerteeinheit kann also beispielsweise dazu ausgebildet sein, eine Gegenkontrolle durchzuführen. Aufgrund der durch den Zeitgeber bestimmten Zeit, die während der Bewegung des Bewegungselementes verstrichen ist, müsste beispielsweise eine gewisse Anzahl von Lichtschranken bereits passiert und somit unterbrochen sein. Ferner müsste also ein bestimmter Ergebniswert vorliegen, ein so genannter Sollwert. Dieser Sollwert wird mit dem tatsächlich ermittelten Ergebniswert verglichen. Stimmen die Werte nicht überein, so liegt kein regulärer Betrieb vor. Gegebenenfalls muss das Bewegungselement gestoppt werden. Denkbar ist beispielsweise, dass ein Objekt von einer Lichtschranke detektiert wird und sich deshalb eine Abweichung im Ergebniswert vom Sollwert ergibt. Grundsätzlich kann somit auch detektiert werden, ob eine sonstige Störung vorliegt. Beispielsweise könnte es sein, dass die Geschwindigkeit des Bewegungselementes nicht der beim regulären Betrieb geforderten Geschwindigkeit entspricht. Somit hat das Bewegungselement zu wenige oder zu viele Lichtschranken passiert. Gegebenenfalls kann in diesem Fall auch ein Stopp des Bewegungselementes durch ein entsprechendes Abschaltsignal erfolgen.
- Denkbar ist weiterhin, im Zusammenhang mit einem derartigen Sollwert eine gewisse Toleranz mit zu berücksichtigen. Die Geschwindigkeit des Bewegungselementes ist regelmäßig auch nur in einem gewissen Toleranzbereich bekannt. Daher kann es vorkommen, dass auch bei regulärem Betrieb unter Berücksichtigung dieser Toleranzen einen Sensor gerade passiert wird oder auch nicht, weil das Bewegungselement bei der größten anzunehmenden und noch tolerierbaren Geschwindigkeit den Sensor gerade passiert hätte, während bei einer Geschwindigkeit an der unteren Toleranzgrenze der Sensor noch nicht passiert worden wäre bzw. noch nicht das Bewegungselement erfassen kann, da es z.B. sich noch außer Reichweite des Sensors befindet.
- Eine derartige Ausführungsform ist insbesondere dann vorteilhaft, wenn es sich um ein Bewegungselement handelt, das eine Teleskopbewegung ausführt. Ein Teleskop-Bewegungselement besitzt aus wenigstens zwei Elementen, welche in parallelen Schienen geführt werden. Bei vollständiger Öffnung befinden sich die Elemente rechtwinklig zur Schließebene am Rand der entsprechenden Öffnung während des Schließvorgangs bzw. der Bewegung befindet sich mindestens ein Element in Bewegung. Ist der Schließvorgang abgeschlossen, befinden sich die Elemente jeweils nebeneinander angeordnet. Beispielsweise bewegen sich die einzelnen Elemente so, dass bei geöffnetem Tor die Sensoren zunächst einer nach dem anderen passiert werden, bis etwa die Hälfte der Toröffnung erreicht ist. Anschließend endet die Erfassung durch den zuerst passierten Sensor, und so wird in derselben Reihenfolge zeitweise ein Sensor nach dem anderen wieder "freigegeben".
- Um dementsprechend einen Sollwert zu bestimmen, ist es notwendig, eine entsprechende Zeitinformation zu erhalten. Ansonsten könnte nur durch eine Kollisionsgefahr bzw. einen Störfall erklärt werden, warum die zunächst passierten Lichtschranken wieder geöffnet sind und beispielsweise nur Sensoren in der Mitte der Toröffnung eine Detektion anzeigen. Dieser Fall muss dann als regulärer Betrieb und nicht als Störfall interpretiert werden. Grundsätzlich ist es also denkbar, dass zwei unterschiedliche Fälle eintreten können, bei denen jedoch die Sensoren in gleicher Weise etwas detektieren oder nicht. In einem Fall kann zum Beispiel ein Störfall vorliegen (z.B.: Tor im oberen Bereich aus der Führung geraten), während im anderen Fall ein regulärer Betrieb vorliegt (z.B. : obere Lichtschranke bei Teleskoptor nach gewisser Zeit nicht mehr unterbrachen).
- Die Sensoren können zum Beispiel als Lichtschranken ausgebildet sein. Denkbar ist aber auch, einen Time-of-flight-(Abk.: TOF-) Sensor einzusetzen. Ein TOF-Sensor ermöglicht grundsätzlich in vorteilhafter Weise zudem eine Abstands- bzw. Positionsbestimmung eines detektierten Objekts. Denkbar ist allerdings, den TOF-Sensor so zu verwenden, dass nur die Information gewonnen wird, ob überhaupt etwas detektiert wird oder nicht.
- Die Sensoren können bei einer bevorzugten Weiterbildung der Erfindung parallel zur Bewegungsrichtung des Bewegungselements angeordnet sein, ferner insbesondere so, dass sie in der Bewegungsebene des Bewegungselementes liegen. Die parallele Anordnung entlang der Bewegungsrichtung ermöglicht, dass nacheinander ein Sensor nach dem anderen das sich bewegende Bewegungselement detektieren kann. Die Anordnung in der Bewegungsebene ermöglicht, dass der Bewegungsraum, in dem eine Kollisionsgefahr bestehen könnte, möglichst vollständig überwacht wird.
- Die Sensoren können ferner senkrecht zur Bewegungsrichtung angeordnet sein, um z.B. den Bewegungsraum gleichmäßig abzurastern.
- Die Auswerteeinheit kann auch dazu ausgebildet sein, die Bewegung des Bewegungselementes zu unterbrechen. Beispielsweise kann eine entsprechende Schalteinheit, ein Schütz bzw. ein Relais oder dergleichen in die Auswerteeinheit integriert sei. Denkbar ist, die Steuerung und/oder Regelung des Bewegungselementes in die Auswerteeinheit zu einer möglichst kompakten Einheit zu integrieren. Die Auswerteeinheit kann also auch als Kontrolleinheit zur Kontrolle, d.h. zur Steuerung und/oder Regelung der Bewegung das Bewegungselerrentes ausgebildet sein. Unter anderem kann die Kontrolleinheit auch dazu ausgebildet sein, einen Befehl eines Benutzers zu empfangen, das Tor zu schließen oder die Bewegung des Tores zu unterbrechen. Ein solcher Befehl kann beispielsweise über ein Bedienpult, eine Fernbedienung, gegebenenfalls akustisch oder in sonstiger Weise abgegeben werden.
- Grundsätzlich können von der Auswerteeinheit die Zustandsvektoren kcntinuierlich oder in zeitlichen Abständen wiederholt erfasst werden, insbesondere auch periodisch.
- Ferner zeichnet sich dementsprechend eine Schließvorrichtung mit einem bewegbaren, geführten Bewegungselement und einer Sicherungsvorrichtung dadurch aus, dass eine erfindungsgemäße Sicherungsvorrichtung bzw. ein Ausführungsbeispiel der Erfindung verwendet wird. Bei einer vorteilhaften Weiterbildung der Erfindung ist das Bewegungselement als Tor ausgebildet. Wenigstens einer der Sensoren ist so angeordnet, dass das Bewegungselement vom Sensor detektiert werden kann.
- Es ist denkbar, eine bestehende Sicherungsvorrichtung bzw. eine bestehende Schließvorrichtung nachzurüsten, indem lediglich eine erfindungsgemäße Auswerteeinheit zur Auswertung von Sensoren zur Generierung eines Abschaltsignals eingebaut wird. Die bestehende Sicherungsvorrichtung bzw. die bestehende Schließvorrichtung kann somit zu einer Ausführungsform der Erfindung werden. Die Auswerteeinheit kann gegebenenfalls auch als Kontrolleinheit zur Kontrolle der Bewegung des Bewegungselementes ausgebildet sein.
- Ein Ausführungsbeispiel der Erfindung ist in den Zeichnungen dargestellt und wird nachstehend in der Angabe weiterer Einzelheiten und Vorteile näher erläutert.
- Im Einzelnen zeigen:
- Figur 1
- eine Schließvorrichtung gemäß der Erfindung,
- Figur 2
- eine Vergleichstabelle für eine Sicherungsvorrichtung gemäß der Erfindung,
- Figur 3
- eine Vergleichstabelle für eine Sicherungsvorrichtung gemäß der Erfindung, welche den Fall einer Entgleisung berücksichtigt, sowie
- Figur 4
- eine Vergleichstabelle für eine Sicherungsvorrichtung gemäß der Erfindung, die für den Fall eines Teleskoptors vorgesehen ist.
-
Figur 1 zeigt eine Schließvorrichtung 1 mit einem Tor 2, dass aus einzelnen Torelementen 2a, 2b und 2c besteht. Das Tor zwei bzw. die einzelnen Elemente 2a, 2b, 2c sind in Führungsschienen 3 geführt. In der Führung der Führungsschienen 3 befinden sich Lichtschranken 4a, 4b, 4c, 4d, 4e, wobei deren einzelne optische Pfande als gestrichelte Linien dargestellt sind. In der Zeichnung befinden sich in der linken Führungsschiene der Führung 3 die Sender der Lichtschranken 4a bis 4e und in der rechten Führungsschiene die entsprechenden Empfänger. Die Bewegungsrichtung beim Schließen des Tores 2 ist durch einen Pfeil 5 dargestellt. Die Bewegung des Tores 2 erfolgt durch einen Antriebsmotor M, der wiederum von einer Kontrolleinheit K gesteuert bzw. geregelt wird. Die einzelnen Empfänger der Lichtschranken 4a bis 4e sind über die entsprechenden Leitungen 6a, 6b, 6c, 6d, 6e mit der Kontrolleinheit K verbunden. Der Ausgang der Kontrolleinheit K ist wiederum mit dem Motor M verbunden, der über diesen Ausgang 7 gesteuert bzw. geregelt wird. - Die Schließebene, in der sich das Tor 2 zwischen den beiden Führungsschienen der Führung 3 bewegt, ist mit dem Bezugszeichen 8 gekennzeichnet. In dieser Ebene bzw. im Bewegungsraum des Tores 2 befindet sich gegenwärtig in der
Figur 1 eine Person 9. Diese Person 9 unterbricht die Lichtschranken 4c, 4d und 4e. Die Lichtschranken 4a und 4b sind nicht unterbrochen. - In
Figur 2 ist eine entsprechende Vergleichstabelle dargestellt. Hier sind sechs Lichtschranken vorhanden, die durch die Variable n Bewegungsrichtung des Tores abgezählt werden. Wird die Lichtschranke nicht unterbrochen (gekennzeichnet durch das Symbol "o" in der Spalte "Status"), wird jeder dieser Lichtschranken der Wert xn = 0 zugeordnet. Wird eine der Lichtschranken unterbrochen (gekennzeichnet durch das Symbol "---" in der Spalte "Status"), so wird dieser unterbrochenen n-ten Lichtschranke der Wert xn = 2n-1 zugeordnet, dass heißt der ersten wird der Wert 1 im Unterbrechungsfall zugeordnet, der zweiten der Wert 2, der dritten der Wert 4, der vierten der Wert 8, der fünften der Wert 16 und der sechsten 32. Wird bei geöffnetem Zustand das Tor in Bewegung gesetzt, so unterbricht es zunächst die erste, dann die zweite, dann die dritte Lichtschranke usw. - Fall I (vgl. Spalte 3 - 4 in
Figur 2 ): Es sind drei Lichtschranken unterbrochen; vorliegend werden der ersten Lichtschranke der Wert 1, der zweiten Lichtschranke der Wert 2, der dritten Lichtschranke der Wert 4 zugeordnet. Den restlichen Lichtschranken wird jeweils der Wert 0 zugeordnet. Da im vorliegenden Ausführungsbeispiel als mathematische Operation eine Addition vorgesehen ist, ergibt sich im Fall 1 als Ergebniswert (Summe) der Wert 7. In der vergleichstabelle ist der Wert 7 enthalten, da die Vergleichstabelle alle Werte enthält, die gebildet werden können, wenn der Reihe nach 1 bis maximal N Lichtschranken unterbrochen ist/sind. Die Vergleichstabelle enthält also die Werte 1, 3, 7, 15, 31, 63. Der Ergebniswert 7 bedeutet, dass die ersten drei Lichtschranken unterbrochen sind. - Fall II (vgl. Spalte 5 - 6 in
Figur 2 ): Durch eine andere Konstellation, insbesondere ein eingedrungenes Objekt, kann dieser Wert grundsätzlich nicht entstehen. Der Fall II zeigt, dass die Lichtschranken 1, 2, 3 und 5 unterbrochen sind. Dieser Fall II kann einer Bewegung des Tores nicht entsprechen, weil das Tor ansonsten im Bereich der vierten Lichtschranke eine Unterbrechung aufweisen müsste, welche den Lichtstrahl der Lichtschranke passieren lassen müsste. Die Unterbrechung der fünften Lichtschranke erfolgt daher durch ein Objekt, das eine Kollision hervorrufen kann und somit muss die Kontrolleinheit die Bewegung des Tores stoppen. Mathematisch gesehen ergibt sich der Ergebniswert 23, der in der Vergleichstabelle nicht enthalten ist. Dieser führt den entsprechend zu einer Unterbrechung. Da diese Abbildung in vorteilhafter Weise bijektiv ist, kann eindeutig den Ergebniswerten ein entsprechender Zustand zugeordnet werden. Die Kontrolleinheit kann also daraus schließen, ob eine Unterbrechung notwendig ist oder nicht. - Das vorliegende Ausführungsbeispiel kann noch einmal dadurch verbessert werden, dass ein Zeizgeber mitläuft, Beispielsweise könnte es sein, dass im vorliegenden Beispiel das Tor tatsächlich die Lichtschranken 1 und 2 passiert hat und die restlichen Lichtschranken eigentlich geöffnet sein müssten. Dringt ein Objekt allerdings so in den Bewegungsraum des Tores ein, dass die nächstfolgende, also die dritte Lichtschranke unterbrochen wird, so würde die Kontrolleinheit dementsprechend dieses Eindringen auch als Bewegung des Tores interpretieren, weil sich insgesamt der Wert 7 ergibt, der ebenfalls in der Vergleichstabelle enthalten ist. Läuft allerdings der Zeitgeber mit, so kann eine Zeitkorrelation erfolgen, dass heißt zu diesem Zeitpunkt der Bewegung des Tores kann der Wert 7 noch nicht erreicht sein, sondern lediglich der Wert 1 + 2 = 3. Dementsprechend kann die Kontrolleinheit die Bewegung des Tores stoppen.
-
Figur 3 zeigt ein Ausführungsbeispiel, bei dem ein sogenannter "Blow-out-Effekt" stattfindet. Dies kann insbesondere bei sogenannten Folientoren der Fall sein. Derartige Folientore sind so geführt, dass bei einem entsprechenden Windstoß bzw. einer Böe, die zu einer Beschädigung des Tores in Folge der großen Krafteinwirkung gegen das Tor führen könnte, dass das Tor an der entsprechenden Stelle, an der die Krafteinwirkung zu groß ist, aus der Führung herausrutscht. Die Kraft wird dadurch reduziert, und es kommt zu keiner Beschädigung des Tores. Die vorliegende Ausführungsform ermöglicht es, zu unterscheiden, ob ein Objekt in den Bewegungsraum eingedrungen ist, oder ob ein solcher sogenannter "Blow-out-Effekt" stattgefunden hat. Dabei wird die Zeit durch einen Zeitgeber mitverfolgt. Die ersten beiden Spalten der Tabelle zeigen einen Fall, bei dem das Tor die ersten drei Lichtschranken passiert hat, und zwar zum Zeitpunkt t-1. Als Ergebniswert wird korrekt zum Zeitpunkt t-1 der Wert 7 (Summe) angeführt, der in der Vergleichstabelle enthalten ist. Hat zum Zeitpunkt t der Ergebniswert immer noch den Wert 7, so bedeutet das, dass das Tor angehalten wurde. - Fall I (in
Figur 3 ): Wird das Tor weiter bewegt, so passiert es bis zum Zeitpunkt t auch die vierte Lichtschranke und nimmt somit korrekt den Wert 15 an, der ebenfalls in der Vergleichstabelle enthalten ist und auch für den Zeitpunkt t vorgesehen ist. Die Kontrolleinheit erkennt also, dass das Tor sich abwärts bewegt. - Fall II (in
Figur 3 ): Im Fall II hat sich das Tor nicht weiter bewegt, nachdem es die dritte Lichtschranke passiert hat, sondern es ist ein Objekt eingedrungen, dass die fünfte Lichtschranke passiert. Hätte sich das Tor weiter bewegt, so wäre zum Zeitpunkt t wie bereits im ersten Fall angesprochen der Ergebniswert 15 zu erwarten gewesen. Durch Unterbrechung der Lichtschranke 5 allerdings liegt nun der Wert 23 (Summe) als Ergebniswert vor. Dieser ist größer als der zu erwartende Ergebniswert und bedeutet daher eine Unterbrechung durch ein Objekt. Das Tor muss angehalten werden. - Fall III (in
Figur 3 ): Der Fall III zeigt einen "Blow-out"-Fall an. Das Tor hat sich bewegt und mittlerweile die vierte Lichtschranke passiert. Der Ergebniswert beträgt allerdings nicht 15, wie es bei regulärem Betrieb der Fall wäre, sondern lediglich 13, da ein Windstoß die Führung im Bereich der zweiten Lichtschranke ausgehebelt hat (sog. "blow-out"). Die Lichtschranke 2 ist daher nicht mehr unterbrochen. Bei einem derartigen Fall kann es sich somit zum Zeitpunkt t zumindest nicht mehr um eine Unterbrechung einer Lichtschranke durch ein Objekt handeln. Es wird eine Lichtschranke wieder in Gang gesetzt, die bereits durch das Tor unterbrochen worden ist und somit grundsätzlich weiterhin unterbrochen sein sollte. Daher ist die Summe kleiner als der zu erwartende Ergebniswert, nämlich der Sollwert 15. -
Figur 4 zeigt eine Tabelle, bei der ein Teleskop-Tor eine Bewegung ausführt. Insgesamt sind acht Lichtschranken vorhanden. Jede Spalte zeigt einen anderen Bewegungszeitpunkt des Tores, und zwar zu den aufeinander folgenden Zeitpunkten t = 1, 2, ..., 8. Die erste Spalte (t = 1) zeigt einen vollkommen geöffneten Zustand. Setzt sich das Tor in Bewegung wird zunächst der erste (bei t = 2), zu einem späteren Zeitpunkt t = 3 die erste und zweite Lichtschranke, dann bei t= 4 die erste, zweite und dritte Lichtschranke, bei t = 5 die erste bis vierte Lichtschranke unterbrochen. Ab diesem Zeitpunkt wird dann zwar auch die nächste, die fünfte Lichtschranke unterbrochen (t = 6). Die erste Lichtschranke wird allerdings bei t = 6 wieder geöffnet, da das entsprechende Element aus dem Bereich der ersten Lichtschranke ausschwenkt. Anschließend wird zusätzlich zur ersten im weiteren Verlauf der Bewegung auch die zweite Lichtschranke geöffnet (t = 7). Die Vergleichstabelle ist demnach so gestaltet, dass je nach verstrichener Zeit während der Bewegung des Tores somit zunächst, im Fall gemäßFigur 2 die Vergleichstabelle die Werte 0, 1, 3, 7 und 15 annehmen kann. Anschließend nimmt jedoch Vergleichstabelle nicht dem Wert 31 sondern den Wert 30 an, da die erste Lichtschranke wieder geöffnet wird. Der nächste Wert ist der Wert 60, da die erste und zweite Lichtschranke geöffnet wird, also 63 - 1 - 2. Dementsprechend lautet der nächste Wert der Vergleichstabelle 120. Bei einem Abweichen von diesen Werten zu den entsprechenden Zeitpunkten bedeutet dies, dass entweder ein Objekt eingedrungen ist, was dann der Fall ist, wenn die Ergebniswerte größer als die Sollwerte der Vergleichstabelle sind zu den entsprechenden Zeitpunkten. Grundsätzlich könnte es sich, wenn die Zeitinformation nicht vorliegen würde, auch um einen sogenannten "Blow-out-Fall" handeln, wenn der Wert kleiner ist als der Sollwert. -
- 1
- Schließvorrichtung
- 2
- Tor
- 2a
- Torelement
- 2b
- Torelement
- 2c
- Torelement
- 3
- Führung
- 4a
- Lichtschranke
- 4b
- Lichtschranke
- 4c
- Lichtschranke
- 4d
- Lichtschranke
- 4e
- Lichtschranke
- 5
- Bewegungsrichtung
- 6a
- Signalleitung
- 6b
- Signalleitung
- 6c
- Signalleitung
- 6d
- Signalleitung
- 6e
- Signalleitung
- 7
- Steuerleitung
- 8
- Bewegungsebene
- 9
- Objekt / Person
- K
- Kontrolleinheit
- M
- Motor
Claims (15)
- Sicherungsvorrichtung zur Absicherung eines bewegbaren, geführten Bewegungselementes gegen ungewollte Kollisionen mit einem auf einem Bewegungsweg des Bewegungselementes (2, 2a, 2b, 2c) liegenden Objekt (9) , welche wenigstens zwei Sensoren (4a, 4b, 4c, 4d, 4e) zur Detektion des Objektes und des Bewegungselementes und zur Ausgabe von Signalen in Abhängigkeit von der Detektion umfasst sowie eine Auswerteeinheit (K) zur Auswertung von Signalen der Sensoren und zur Generierung eines Abschaltsignals anhand der Auswertung aufweist, dadurch gekennzeichnet, dass die Auswerteeinheit dazu ausgebildet ist, von den wenigstens zwei Sensoren einen aktuell detektierten Zustandsvektor (6a, 6b, 6c, 6d, 6e) aus einer Menge an Zustandsvektoren, welche eindeutig alle möglichen Kombinationen der Signale der Sensoren umfassen, zu erfassen und im Falle vorbestimmter Zustandsvektoren das Abschaltsignal (7) zu generieren.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass
die Auswerteeinheit dazu ausgebildet ist, aus einer Menge an Zustandsvektoren, welche die Signale der jeweiligen Sensoren einzeln in Abhängigkeit von deren Position umfassen, jedem Zustandsvektor eindeutig genau eine Zustandsinformation aus einer vorbestimmten Zielmenge über eine bijektive Abbildung zuzuordnen, und im Falle vorbestimmter zustandsinformationen das Abschaltsignal zu generieren. - Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit dazu ausgebildet ist:- den Sensoren jeweils einen Zahlenwert in Abhängigkeit von deren Position und von deren Signal zuzuordnen und den Zustandsvektor aus diesen Zahlenwerten zusammenzusetzen, und- die bijektive Abbildung als mathematische Operation der Zahlenwerte, insbesondere als Addition, durchzuführen, sodass als Zustandsinformation ein entsprechender Ergebniswert erhalten wird,
wobei eine Speichereinheit vorhanden ist, in der eine Vergleichstabelle mit Vergleichs zahlen, welche den vorbestimmten Zustandsvektoren entsprechen, hinterlegbar ist, und wobei die Auswerteeinheit dazu ausgebildet ist, den bestimmten Ergebniswert mit den Vergleichszahlen der Vergleichstabelle zu vergleichen und abhängig davon das Abschaltsignal zu generieren, wobei vorzugsweise die Auswerteeinheit dazu ausgebildet ist, jedem der Sensoren den Zahlenwert Null zuzuordnen, wenn der Sensor nicht unterbrochen ist, und die Zuordnung des Zahlenwertes in Abhängigkeit vom jeweiligen Sensor bei insgesamt N Sensoren (N ≥ 2, N: natürliche Zahl) danach durchzuführen, welche Position der Sensor innerhalb der Anordnung der N Sensoren besitzt, wobei insbesondere die Auswerteeinheit dazu ausgebildet ist, dem n-ten (n = 1, 2, ... N) Sensor innerhalb der Anordnung der Sensoren den Zahlenwert 2n-1 (2 hoch (n-1)) zuzuordnen. - Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit dazu ausgebildet ist, vorbestimmte Zustandsvektoren zu verwenden und einen aktuell detektierten Zustandsvektor mit den vorbestimmten Zustandsvektoren zu vergleichen und im Falle vorbestimmter Zustandsvektoren das Abschaltsignal zu generieren.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit dazu ausgebildet ist, wenigstens einen vor dem aktuell detektierten Zustandsvektor erfassten Zustandsvektor wenigstens temporär zu speichern und mit dem aktuell detektierten Zustandsvektor zu vergleichen.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass ein Zeitgeber vorhanden ist, der mit Einsetzen der Bewegung des Bewegungselementes aktivierbar ist und beim Stoppen der Bewegung des Bewegungselements angehalten werden kann, wobei der Zeitgeber dazu ausgebildet ist, einen Zeitwert an die Auswerteeinheit zu übermitteln.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit dazu ausgebildet ist, die zur Generierung des Abschaltsignals vorbestimmten Zustandsvektoren anhand des Zeitwertes zu bestimmen.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit dazu ausgebildet ist, den Signalen und/oder den Ergebniswerten zusätzlich einen Zeitwert zuzuordnen, der dem Zeitpunkt der Detektion entspricht, wobei die Auswerteeinheit einen Zeitgeber umfasst, der mit Einsetzen der Bewegung des Bewegungselementes aktivierbar ist und beim Stoppen der Bewegung des Bewegungselements angehalten werden kann, sodass der Zeitgeber die bereits verstrichene Zeit der Bewegung des Bewegungselemenzes misst, und wobei die Auswerteeinheit dazu ausgebildet ist, anhand des Zeitwertes einen Sollwert zu errechnen, der sich aus den Signalen der bei regulärem Betrieb unterbrochenen Sensoren ergeben würde sowie den Ergebniswert mit dem Sollwert zu vergleichen und abhängig davon das Abschaltsignal zu generieren.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass der Sensor als Strahlenschranke, insbesondere als Unterbrechungslichtschranke oder als Reflexionslichtschranke oder als Time-of-flight-(TOF-) Sensor, ausgebildet ist,
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Sensoren parallel zur Bewegungsrichtung (5) des Bewegungselementes (2) und/oder in der Bewegungsebene (8) des Bewegungselementes (2) angeordnet sind.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Sensoren senkrecht zur Bewegungsrichtung (5) des Bewegungselementes (2) ausgerichtet sind.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit dazu ausgebildet ist, bei Vorliegen des Abschaltsignals die Bewegung des Bewegungselementes zu unterbrechen.
- Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, dadurch gekennzeichnet, dass die Auswerteeinheit dazu ausgebildet ist, den Vergleich mit der Vergleichtabelle wiederholt während der Bewegung des Bewegungselementes durchzuführen.
- Schließvorrichtung (1) mit einem bewegbaren, geführten Bewegungselement und einer Sicherungsvorrichtung nach einem der vorgenannten Ansprüche, wobei wenigstens einer der Sensoren so angeordnet ist, dass er das Bewegungselement bei dessen Bewegung erfassen kann.
- Auswerteeinheit zur Auswertung von Sensoren einer Sicherungsvorrichtung und zur Generierung eines Abschaltsignals zum Abschalten des Antriebs des Bewegungselementes, wobei die Auswerteeinheit und die Sicherungsvorrichtung nach einem der vorgenannten Ansprüche ausgebildet sind.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP11008656.8A EP2586959B2 (de) | 2011-10-28 | 2011-10-28 | Sicherungsvorrichtung, Schließvorrichtung und Auswerteeinheit |
| DK11008656.8T DK2586959T4 (en) | 2011-10-28 | 2011-10-28 | Safety device, closure and evaluation unit |
| US13/284,005 US8988213B2 (en) | 2011-10-28 | 2011-10-28 | Safety device, closing device and evaluation unit |
| CN201210548388.XA CN103089109B (zh) | 2011-10-28 | 2012-10-26 | 安全装置、关闭装置以及评估单元 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP11008656.8A EP2586959B2 (de) | 2011-10-28 | 2011-10-28 | Sicherungsvorrichtung, Schließvorrichtung und Auswerteeinheit |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2586959A1 true EP2586959A1 (de) | 2013-05-01 |
| EP2586959B1 EP2586959B1 (de) | 2013-12-25 |
| EP2586959B2 EP2586959B2 (de) | 2016-09-14 |
Family
ID=45065575
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP11008656.8A Active EP2586959B2 (de) | 2011-10-28 | 2011-10-28 | Sicherungsvorrichtung, Schließvorrichtung und Auswerteeinheit |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8988213B2 (de) |
| EP (1) | EP2586959B2 (de) |
| CN (1) | CN103089109B (de) |
| DK (1) | DK2586959T4 (de) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2845985A1 (de) | 2013-07-18 | 2015-03-11 | Cedes AG | Torsicherungssystem |
| EP3530855A1 (de) * | 2018-02-26 | 2019-08-28 | Marantec Antriebs- und Steuerungstechnik GmbH & Co. KG. | Toranlage |
| WO2019162199A1 (de) * | 2018-02-26 | 2019-08-29 | Marantec Antriebs- Und Steuerungstechnik Gmbh & Co. Kg | Verfahren zum bestimmen der torposition bei einer toranlage |
| WO2021037345A1 (de) * | 2019-08-27 | 2021-03-04 | Marantec Antriebs- Und Steuerungstechnik Gmbh & Co. Kg | Verfahren zum bestimmen der torposition bei einer toranlage |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2506034B1 (de) * | 2011-04-01 | 2013-05-29 | Cedes AG | Sensorvorrichtung, Sicherheitsvorrichtung, Tor und Verfahren zur Kontrolle der Bewegung |
| US9823338B2 (en) * | 2014-04-03 | 2017-11-21 | Evolv Technologies, Inc. | Feature extraction for radar |
| JP2015214794A (ja) * | 2014-05-08 | 2015-12-03 | 文化シヤッター株式会社 | 開閉装置の開閉体停止装置 |
| CN104453681A (zh) * | 2014-11-19 | 2015-03-25 | 无锡悟莘科技有限公司 | 一种基于感应的门帘转动控制方法 |
| JP6421043B2 (ja) * | 2015-01-16 | 2018-11-07 | 文化シヤッター株式会社 | 開閉装置 |
| DE102015101017B4 (de) * | 2015-01-23 | 2018-02-22 | Efaflex Tor- Und Sicherheitssysteme Gmbh & Co. Kg | Verfahren zur Steuerung einer Toranordnung sowie derartige Toranordnung und eine Sicherheitseinrichtung hierfür |
| US10619397B2 (en) * | 2015-09-14 | 2020-04-14 | Rytec Corporation | System and method for safety management in roll-up doors |
| EP3530869B1 (de) | 2018-02-27 | 2020-04-15 | Cedes AG | Lichtgitter mit distanzinformation und deren verwendung |
| WO2020005080A1 (en) * | 2018-06-29 | 2020-01-02 | Turinsky Wilfried Manfred | A safety device for use with a panel return and an edgebander |
| WO2020132416A1 (en) | 2018-12-21 | 2020-06-25 | Rytec Corporation | Safety system and method for overhead roll-up doors |
| DE102019131324A1 (de) | 2019-06-05 | 2020-12-10 | Eurodoors Production GmbH | Toranlage mit einer Einrichtung zur Kollisionserkennung |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE29901664U1 (de) * | 1999-02-03 | 1999-04-15 | Samaco Gmbh | Hubtor mit Lichtgitter-Überwachungseinrichtung |
| DE202006002000U1 (de) * | 2006-02-08 | 2006-04-06 | Adolf Seuster Gmbh & Co. Kg | Tor mit Lichtschrankenanordnung |
| EP1841942B1 (de) | 2005-01-26 | 2009-01-07 | Cedes AG | Vorrichtung zur absicherung eines angetriebenen bewegungselements |
| EP2236732A2 (de) * | 2009-03-17 | 2010-10-06 | Seuster KG | Tor |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5233185A (en) * | 1992-02-28 | 1993-08-03 | Gmi Holdings, Inc. | Light beam detector for door openers using fiber optics |
| US5583405A (en) * | 1994-08-11 | 1996-12-10 | Nabco Limited | Automatic door opening and closing system |
| DE19604900C2 (de) | 1996-02-10 | 2000-02-03 | Hermann Wegener | Sicherungseinrichtung für handbediente Werkzeugmaschinen, insbesondere für Abkantpressen |
| DE19739543A1 (de) | 1997-09-09 | 1999-03-11 | Efaflex Inzeniring D O O Ljubl | Sicherheitseinrichtung für motorisch angetriebene Tore |
| DE29912572U1 (de) † | 1999-07-19 | 1999-09-16 | Marantec Antrieb Steuerung | Vorrichtung zum Öffnen bzw. Schließen eines Tores |
| GB2353855B (en) * | 1999-08-23 | 2002-02-20 | Airdri Ltd | Gap scanning |
| DE10203145C1 (de) † | 2002-01-28 | 2003-04-17 | Efaflex Tor & Sicherheitssys | Einrichtung zur automatischen Betätigung eines Tores, insbesondere eines Hubtores |
| US7532709B2 (en) * | 2005-02-04 | 2009-05-12 | Styers Justin R | Remote garage door monitoring system |
| US7986220B2 (en) * | 2006-02-08 | 2011-07-26 | Nabtesco Corporation | Automatic door system |
| US8752032B2 (en) * | 2007-02-23 | 2014-06-10 | Irdeto Canada Corporation | System and method of interlocking to protect software-mediated program and device behaviours |
| DE102007050334A1 (de) | 2007-10-18 | 2009-04-23 | Efaflex Tor- Und Sicherheitssysteme Gmbh & Co. Kg | Verfahren und Einrichtung zur Steuerung eines vertikal oder horizontal bewegten Tores unter Absicherung der Torschließebene gegenüber Hindernissen |
| DE102008023294B4 (de) * | 2008-01-16 | 2010-02-04 | Cedes Ag | Sicherungssystem zur Absicherung eines sich bewegenden, geführten Bewegungselements gegen ungewollte Kollisionen |
| EP2226452B1 (de) * | 2008-12-12 | 2014-05-14 | Pepperl + Fuchs GmbH | Türüberwachungssensor |
| EP2374985A3 (de) † | 2010-04-08 | 2014-10-01 | Strack Lift Automation GmbH | Motorisch angetriebenes Tor mit einer Sicherheitseinrichtung |
-
2011
- 2011-10-28 EP EP11008656.8A patent/EP2586959B2/de active Active
- 2011-10-28 DK DK11008656.8T patent/DK2586959T4/en active
- 2011-10-28 US US13/284,005 patent/US8988213B2/en active Active
-
2012
- 2012-10-26 CN CN201210548388.XA patent/CN103089109B/zh active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE29901664U1 (de) * | 1999-02-03 | 1999-04-15 | Samaco Gmbh | Hubtor mit Lichtgitter-Überwachungseinrichtung |
| EP1841942B1 (de) | 2005-01-26 | 2009-01-07 | Cedes AG | Vorrichtung zur absicherung eines angetriebenen bewegungselements |
| DE202006002000U1 (de) * | 2006-02-08 | 2006-04-06 | Adolf Seuster Gmbh & Co. Kg | Tor mit Lichtschrankenanordnung |
| EP2236732A2 (de) * | 2009-03-17 | 2010-10-06 | Seuster KG | Tor |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2845985A1 (de) | 2013-07-18 | 2015-03-11 | Cedes AG | Torsicherungssystem |
| EP3530855A1 (de) * | 2018-02-26 | 2019-08-28 | Marantec Antriebs- und Steuerungstechnik GmbH & Co. KG. | Toranlage |
| WO2019162199A1 (de) * | 2018-02-26 | 2019-08-29 | Marantec Antriebs- Und Steuerungstechnik Gmbh & Co. Kg | Verfahren zum bestimmen der torposition bei einer toranlage |
| WO2021037345A1 (de) * | 2019-08-27 | 2021-03-04 | Marantec Antriebs- Und Steuerungstechnik Gmbh & Co. Kg | Verfahren zum bestimmen der torposition bei einer toranlage |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2586959B2 (de) | 2016-09-14 |
| DK2586959T3 (en) | 2014-03-17 |
| CN103089109A (zh) | 2013-05-08 |
| DK2586959T4 (en) | 2017-01-09 |
| CN103089109B (zh) | 2016-12-28 |
| US20130106601A1 (en) | 2013-05-02 |
| US8988213B2 (en) | 2015-03-24 |
| EP2586959B1 (de) | 2013-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2586959B1 (de) | Sicherungsvorrichtung, Schließvorrichtung und Auswerteeinheit | |
| EP2506034B1 (de) | Sensorvorrichtung, Sicherheitsvorrichtung, Tor und Verfahren zur Kontrolle der Bewegung | |
| EP1841942B1 (de) | Vorrichtung zur absicherung eines angetriebenen bewegungselements | |
| DE3618692C2 (de) | ||
| DE102010017398B3 (de) | Verfahren zum Betrieb eines Tores sowie Vorrichtung zum Betrieb eines Tores | |
| WO2013034252A1 (de) | Steuersystem | |
| DE102006008513A1 (de) | Sensor-Überwachungseinrichtung | |
| DE102008044990A1 (de) | Verfahren und Vorrichtung zur Ansteuerung und/oder Überwachung eines motorisch angetriebenen Flügels während der Öffnungsphase | |
| EP2799384A1 (de) | Motorisch angetriebenes Tor mit einer Sicherheitseinrichtung | |
| WO2014147228A1 (de) | Einklemmschutz für ein verstellbares fahrzeugteil | |
| DE102019126718A1 (de) | Einrichtung zur gebäudefesten installation mit wenigstens einem automatisch bewegbaren flügelelement und verfahren hierzu | |
| DE4337828A1 (de) | Verfahren und Vorrichtung zur Regelung und/oder Steuerung einer Tür | |
| WO2009000823A1 (de) | Verfahren und vorrichtung zum erkennen eines einklemmfalls | |
| EP2531684A1 (de) | Torantriebsvorrichtung, damit versehener gebäudeabschluss, torsystem und herstell- und antriebsverfahren | |
| EP2204891B1 (de) | Stellantrieb eines Kfz-Bauteils und Verfahren zum Betreiben eines solchen Stellantriebs | |
| DE102020201343A1 (de) | Verfahren zur Verstellung eines Fahrzeugteils und zugehörige Stellvorrichtung | |
| DE102016211054A1 (de) | Kollisionsschutzverfahren für ein motorisch bewegliches Kraftfahrzeugteil sowie zugehörige Vorrichtung | |
| DE4337015B4 (de) | Verfahren zur Steuerung eines motorischen Antriebs einer Tür- oder Fensteranlage | |
| EP2845985B1 (de) | Torsicherungssystem | |
| EP2943630B1 (de) | Kapazitive annäherungssensoranordnung an einer tür eines kraftfahrzeugs zum erfassen einer näherungsweise horizontalen annäherungsbewegung einer bedienerhand | |
| EP2694766B1 (de) | Verfahren zum steuern eines türantriebs | |
| EP0446651A2 (de) | Elektropneumatischer Türantrieb in Fahrzeugen für Personenbeförderung | |
| DE102011102232A1 (de) | Lichtgitter | |
| EP4013933A1 (de) | Verfahren zum bestimmen der torposition bei einer toranlage | |
| EP1048812B1 (de) | Verfahren zum Normieren der Scheibenposition eines fremdkraftbetätigten Kraftfahrzeugfensterhebers |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20111028 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20130829 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 646769 Country of ref document: AT Kind code of ref document: T Effective date: 20140115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502011001862 Country of ref document: DE Effective date: 20140220 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: KELLER AND PARTNER PATENTANWAELTE AG, CH |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20140314 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140325 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140425 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140428 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502011001862 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| 26 | Opposition filed |
Opponent name: SICK AG Effective date: 20140919 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502011001862 Country of ref document: DE Effective date: 20140919 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: NEW ADDRESS: EIGERSTRASSE 2 POSTFACH, 3000 BERN 14 (CH) |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20141028 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20141031 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20150630 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20141031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20141028 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20151021 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20151021 Year of fee payment: 5 |
|
| RIC2 | Information provided on ipc code assigned after grant |
Ipc: E06B 9/68 20060101ALI20160122BHEP Ipc: E06B 9/88 20060101AFI20160122BHEP |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20151028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20140326 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20111028 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151028 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| PUAH | Patent maintained in amended form |
Free format text: ORIGINAL CODE: 0009272 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT MAINTAINED AS AMENDED |
|
| 27A | Patent maintained in amended form |
Effective date: 20160914 |
|
| AK | Designated contracting states |
Kind code of ref document: B2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R102 Ref document number: 502011001862 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: AELC |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T4 Effective date: 20170104 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20131225 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161031 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161031 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 646769 Country of ref document: AT Kind code of ref document: T Effective date: 20161028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161028 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20131225 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230519 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 20231025 Year of fee payment: 13 Ref country code: DE Payment date: 20231018 Year of fee payment: 13 |