EP2504826B1 - Systeme d'aide personnalisee a la conduite d'un vehicule - Google Patents
Systeme d'aide personnalisee a la conduite d'un vehicule Download PDFInfo
- Publication number
- EP2504826B1 EP2504826B1 EP10801600.7A EP10801600A EP2504826B1 EP 2504826 B1 EP2504826 B1 EP 2504826B1 EP 10801600 A EP10801600 A EP 10801600A EP 2504826 B1 EP2504826 B1 EP 2504826B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- user
- disturbance
- remote server
- vehicle
- reliability
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000004044 response Effects 0.000 claims description 23
- 238000004891 communication Methods 0.000 claims description 11
- 238000012790 confirmation Methods 0.000 claims description 8
- 230000011664 signaling Effects 0.000 claims description 8
- 230000000007 visual effect Effects 0.000 claims description 7
- 230000003213 activating effect Effects 0.000 claims description 4
- 230000003252 repetitive effect Effects 0.000 claims description 2
- 238000005259 measurement Methods 0.000 claims 1
- 230000001131 transforming effect Effects 0.000 claims 1
- 238000004422 calculation algorithm Methods 0.000 description 8
- 230000006870 function Effects 0.000 description 7
- 230000004807 localization Effects 0.000 description 6
- 238000004364 calculation method Methods 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 238000001914 filtration Methods 0.000 description 3
- 230000006399 behavior Effects 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 229920000297 Rayon Polymers 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000002457 bidirectional effect Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
- 239000002964 rayon Substances 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000001755 vocal effect Effects 0.000 description 1
- 230000002747 voluntary effect Effects 0.000 description 1
Images






Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
-
- G06Q50/40—
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0129—Traffic data processing for creating historical data or processing based on historical data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0141—Measuring and analyzing of parameters relative to traffic conditions for specific applications for traffic information dissemination
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096716—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information does not generate an automatic action on the vehicle control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096733—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place
- G08G1/096741—Systems involving transmission of highway information, e.g. weather, speed limits where a selection of the information might take place where the source of the transmitted information selects which information to transmit to each vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096775—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a central station
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096791—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is another vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0968—Systems involving transmission of navigation instructions to the vehicle
- G08G1/0969—Systems involving transmission of navigation instructions to the vehicle having a display in the form of a map
Definitions
- the present invention relates to a personalized assistance system for driving a vehicle, and more particularly to the means making it possible to evaluate the risk of the presence of road disturbances in a given zone of presence thereof, and to communicate the content to its driver.
- GPS satellite positioning receiver
- Apparatuses are also known capable of detecting the proximity of speed measuring radars and of signaling their presence and proximity to the driver; devices whose the use is currently prohibited by the legislation in force.
- these on-board navigation systems must therefore satisfy two apparently contradictory conditions, namely, on the one hand, to allow the driver to communicate in an easy and detailed manner with the system, and, on the other hand, to present an interface particularly simplified user in order to minimize the level of attention and the manipulations required by it.
- US 5,182,555 also discloses a signaling system of a level of risk of road disturbance in a predetermined area where the collection of information is done by means of sensors on the vehicle.
- the user is not given an indication to take into account the relevance of the information communicated to him and the probability of encountering a disturbance. determined. However, this is for him essential information for the safety of his conduct.
- the present invention aims to remedy this drawback by proposing a personalized assistance system for driving a vehicle that integrates a driver information function on the reliability of the information communicated to him.
- the remote server will include means for storing the reliability indices of the users and the onboard device will comprise means capable of activating the interrogation on the presence of the disturbance as soon as the vehicle passes "on" the latter.
- the interrogation means and the response means may be of any type and in particular of the vocal or visual type.
- the remote server may comprise means capable of transmitting to the on-board device the reliability index parameter of the user having signaled or confirmed a disturbance, and / or the average reliability index parameter of several users having signaled or confirmed a same disturbance.
- the remote server will comprise calculation means able to determine, from the reliability index of a user, or from the average reliability index of several users who have reported or confirmed the same disturbance, information as to the reliability of the presence information of a disturbance.
- the remote server will comprise a database containing the location of so-called potential disturbances, which exist statistically in the same given road zone, as well as the probability of presence in this location of these and, possibly, at a given date and / or time, as well as measuring the time of use of it by a user over a period of time, including a day.
- the remote server will comprise a database able to record all the disturbances reported by its users during said period. It will also include calculation means able to modulate the probability of presence of a disturbance by the number of users or the reliability index of the latter who are "on" this disturbance in a period of time elapsed, by example half an hour.
- the remote server will comprise means capable of generating information characteristic of the synthesis of the various parameters able to influence the probability of presence of a disturbance. and possibly means able to transform this presence probability information in the form of at least one signal.
- the onboard device will comprise meanwhile means for displaying said signal on a screen.
- the signal will consist of a sign or a set of signs whose color will be a function of the level of the probability of presence of the disturbance. In order to easily attract the attention of the user of the vehicle, said color may occupy more than half of the surface of the display screen.
- the remote server will comprise means capable of determining the repetitive nature of disturbances signaled and to calculate for a given place and a given moment the probability of presence of these so-called “potential" disturbances and will possibly include means allowing to modulate them, in particular by taking into account the number of vehicles which have passed over a potential disturbance without the report and the reliability index of the users concerned.
- the remote server will include means capable of counting the number of these vehicles.
- the reliability index of the users may consist of an arithmetic average of the reliability indices of the users concerned.
- the reliability index of a user may be a function of a parameter proportional to the time of use of the system by the user and / or a parameter proportional to his participation rate and / or his rate confirmation, for a given period of time.
- the on-board device will advantageously comprise means capable of activating the interrogation of the presence of a disturbance as soon as the vehicle passes "on" the latter.
- These interrogation means and the response means may be of the voice type and / or of the visual type.
- the embedded device may include means capable of informing the user of the vehicle visually and / or sound of the probability of presence of a disturbance.
- the information may be delivered to the user on display means in the form of a sign or a set of signs whose color may be a function of the level of the probability of presence of the disturbance.
- These display means may consist of a screen and said color may occupy more than half of the surface thereof.
- the system according to the invention which is represented by schematically on the figure 1 essentially comprises a remote server 1 and an onboard device 3 on a vehicle.
- the server 1 comprises two sets of databases, namely a set called “statistical” and a set called “real time”.
- the set of statistical type comprises on the one hand a database 5, called “base Disturbations” in which have been stored the coordinates of the various disturbances existing on the road network which are of permanent or quasi-permanent type, such as by for example, traffic jams, fixed speed cameras or areas under construction or areas in which accidents have recently occurred.
- base Disturbations in which have been stored the coordinates of the various disturbances existing on the road network which are of permanent or quasi-permanent type, such as by for example, traffic jams, fixed speed cameras or areas under construction or areas in which accidents have recently occurred.
- the set of statistical type comprises on the other hand a database 7, called "User base” which contains statistical type data on the users of vehicles equipped with a system according to the invention. Furthermore, the present invention proposes to take into account the degree of relevance of the information reported to the system by the users, and this in order to avoid that it takes into consideration whimsical information, that the latter are so voluntary or involuntary, the database 7, which is periodically updated in deferred processing and in particular once a day, and particularly at night, contains an IF index representative of the reliability of the information returned by each user. This reliability index IF is established by a processor throughout the use of the system, depending on the behavior of the user especially when the latter is in the presence of a disturbance, as described below.
- the statistical type set also includes a database 8 called "Geographical base" which makes it possible to locate the vehicles on the road axes as well as the various disturbances, from their coordinates in latitude L and in longitude l .
- the set of type in real time comprises two databases, namely a database 9 called “base locating vehicles” in which is kept updated the location of all vehicles implementing the system according to the invention , and a database 11 known as “signal-based disturbances” in which is stored in real time the location of the disturbances detected by the users and reported by the latter to the server 1 by means of remote communication as explained below .
- the statistical and real-time bases are managed by a processor 13 which is associated with filtering means 14 of the information that is received from the various devices, embedded on the vehicles 3 implementing the system according to the invention.
- the base 9 "Location of vehicles” maintains in real time the location, that is to say the latitude and longitude of each of the vehicles implementing the system and their positioning on the traffic lanes after the processor 13 consulted the database "Geography”.
- This data as well as the path taken by the vehicle in a given road segment S and in a last determined period of time T are periodically addressed by the on-board device 3 to the remote server 1.
- This time period T may for example be from order of half an hour.
- This database is associated with means for calculating the processor 13 which determine the track A on which each vehicle moves, the segment S of this track on which the vehicle is located during said period of time. time T , the identity I of the vehicle on-board device, and the time H of passage of the vehicle V in the track segment S. It will be noted that, according to the invention, a track segment S consists of a section taken on the same track, for example between two different speed limits.
- the processor 13 is thus able to determine how many vehicles n and which vehicles V 1 , V 2 , ... V n have passed through a location belonging to the segment S determined during said last period of time T and in which direction D these vehicles are gone.
- the second real-time database 11 known as the "Disturbances Reported Base” includes means capable of storing the disturbances P 1 , P 2 ,... P n that are signaled by the users and classifying them in several categories, it being understood that 'In the course of time a disturbance has the possibility of evolving from one category to another.
- the processor 13 is thus able to manage two main categories of disturbances, namely real-type disturbances and potential-type disturbances. It thus appeals to the following categories:
- the database "base disturbances reported" is associated with processor calculation means 13 whose function is to manage the backup of the data returned in real time by the users.
- each of the on-board devices 3 consists essentially of a processor 15 whose role is to manage positioning means, in particular constituted by a GPS receiver 19, a RAM memory 17, and remote communication means, in particular consisting of a GPRS modem, which allows the dialogue with the remote server 1.
- a processor 15 whose role is to manage positioning means, in particular constituted by a GPS receiver 19, a RAM memory 17, and remote communication means, in particular consisting of a GPRS modem, which allows the dialogue with the remote server 1.
- the onboard device 3 also comprises addressing means consisting in particular of a series of buttons 24 which can be grouped together to form a keyboard 23a, by means of which the user of a vehicle sends information and instructions to the server remote 1 via a modem 21 and a GPRS network 4.
- addressing means can also be of voice type and consist of a microphone 23b.
- the embedded device 3 also comprises means enabling the user to receive information from the remote server 1. This information is managed by the user.
- processor 15 can be delivered visually on a display 25a and / or audibly by means of a loudspeaker 25b.
- the GPS receiver 19 of each of the on-board devices determines in real time the location of the vehicle on which it is installed, ie the position, the heading and the speed thereof and transmits regularly, for example all minutes, this information to the remote server 1 by the GPS modem 21.
- the remote server 1 identifies the road lane A on which the vehicle V is located, by comparison between the location made by the onboard system and the information contained in the database 8 "Geographical base" and defines the lane segment S on which is the vehicle. The remote server 1 also determines the direction D of the path made by the vehicle V on the segment S.
- the on-board device 3 of the vehicle V stores all this information in its RAM memory 17 so that it can be exploited later by its processor 15 when the vehicle V is at a warning distance r of a disturbance.
- the processor makes a distinction with regard to the management of real-type disturbances and the management of potential-type disturbances as defined above.
- the processor 15 Once the GPS receiver 19 of the on-board device 3 locates the position of the vehicle V on which it is installed after the position of the perturbation concerned, the processor 15 generates a message on the display 25b of the type "DISTURBANCE ALWAYS PRESENT? And offers the user a choice YES / NO for a predefined period, in particular of the order of 15 seconds.
- the processor 15 returns the response, or the no answer, to the remote server 1 where it will be used later, in delayed processing, by the processor 13 to update the reliability index which is assigned to each user of the following system. invention and which is stored in the database "user base” 7 and which evolves during the time of use and this according to the behavior of this user vis-à-vis the system.
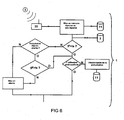
- the processor 13 At reception, as shown on the algorithm of the figure 6 , the processor 13 first stores in the database 11 "base disturbances reported" the response received from the user, or the non-response thereof, then he consults the database 7 "User base” to extract the reliability index IF of the user associated with the vehicle V. If the latter has a reliability index IF greater than a threshold index I s , it takes into account the information sent by the user, so that if it has reversed the presence of the disturbance, the processor disables the latter in the base 11 "base Disturbances reported" and a new vehicle on the same segment of track S will no longer be signified this disturbance. If on the other hand the user of the vehicle V confirms the disturbance it is left as active.
- the processor puts the information on hold until a new user comes to confirm the information of the user. first. If this new user confirms the information of the first and if the sum of their respective reliability indices exceeds the reliability threshold Is , then the information is confirmed and the disturbance is declared as not active.
- the user does not answer the question, it means that he does not wish to participate fully in the system and this non-response is taken into account by the processor 13 and stored in the database 11 so that, when periodic deferred processing of the various information sent to the remote server during a period of time, for example a day, it can be taken into account by the processor to reduce the IF reliability index of the user concerned.
- a so-called potential disturbance is a disturbance which has been found several times at a certain place on a certain date and at a certain time. There is therefore a probability P that a user who is in this place at the same time also meets her.
- the processor of the device according to the invention has filtering means 14 which are intended for modulate this probability according to a proportion of the number of users n p who adhere to the present system and who are "on" the disturbance in the recent past, of the order for example of the last half-hour, and who have not reported it, and secondly the IF reliability index of these users.
- the processor considers that the real probability P r of encountering a potential perturbation is equal to the probability of presence P thereof divided by the number of users n p that have passed "on" the disturbance in a recent past without reporting it divided by the average reliability index of these users.
- P r P / S ⁇ 1 + not p X IF m
- ⁇ represents an adjustment coefficient whose value will be determined by the experiment, in particular by an iterative method.
- the real-time data come from the users who, during their journeys, signal the disturbances they are caused to encounter. So, as depicted on the algorithm of the figure 7 when a user encounters a disturbance, he then actuates a button 24 belonging to the signaling means, which has the effect of sending a signal via the GPRS modem 21 to the remote server 1.
- This signal comprises several components, namely a component specific to the disturbance, a component specific to its location and an identification component that allows the processor 13 to know which user the information comes from.
- the processor 13 first saves this information in the base 11 "base disturbances reported", then consults the database 7 "base users” in order to know the reliability index IF associated with the user who issued the signal.
- the processor 13 takes into account the disturbance information that has been transmitted to it and stores it in memory in the database 11 "base Perturbations reported" where it is classified in the category of "active" disturbances, so that this information will be communicated to any user of a vehicle entering the surveillance radius R of track A where it was found.
- the processor 13 classifies the information in the database 11 "base Perturbations reported" in the category "en confirmation wait ", and waits for confirmation from another user to see if the pending reliability indices have a sufficient level to place the information in the" active "category.
- the user has the possibility of setting the conditions according to which he wishes to be alerted to disturbances of the potential type.
- the updating of the reliability indices of the users of the system will preferably be made periodically in deferred time, preferably once a day and especially at night.
- the processor extracts from the database 11 "Disturbances reported database” the data that has been stored during the last period of reference time, in particular the last month, then proceeds to sort them by user . Then, for each of these, the processor updates the time of use of the system and stores it in the database 7 "User base”. Then, if the user has reported existing disturbances and / or has encountered disturbances, the processor updates in the database 7 "User base", the user participation rate and its confirmation rate of disturbances he has encountered.
- the processor thus proceeds for each of the users having used the system according to the invention in the period of time of the month.
Description
- La présente invention concerne un système d'aide personnalisée à la conduite d'un véhicule, et plus particulièrement des moyens permettant d'évaluer le risque de présence de perturbations routières dans une zone de présence déterminée de celui-ci, et à en communiquer la teneur à son conducteur.
- On connaît de nombreux appareils dont la vocation est d'assurer le guidage en temps réel des véhicules ainsi que la communication à leur conducteur d'un certain nombre d'événements susceptibles d'avoir une influence sur les conditions de navigation, tels que la localisation de perturbations, notamment les embouteillages, les travaux, la présence de radars, le brouillard, les plaques de verglas etc ...
- La plupart des véhicules sont ainsi équipés d'ordinateurs de bord à l'aide desquels l'utilisateur est en mesure de connaître les paramètres de configuration de son véhicule et d'intervenir éventuellement sur certains de ceux-ci afin de les mettre en conformité avec la navigation qu'il souhaite effectuer.
- Ces véhicules sont par ailleurs équipés d'un récepteur de localisation par satellites (GPS) qui est assorti d'un système de navigation fournissant au conducteur toutes les indications qui lui sont nécessaires pour effectuer un trajet déterminé à partir d'un point de départ vers un point de destination, certains de ces systèmes de navigation étant même équipés de moyens récepteurs annexes en mesure de recevoir les informations sur le trafic et de les retransmettre, éventuellement commentées, à l'utilisateur.
- On connaît également des appareils aptes à détecter la proximité de radars de mesure de vitesse et à en signaler la présence et la proximité au conducteur ; appareils dont l'utilisation est actuellement prohibée par la législation en vigueur.
- On comprend que, pour assurer de telles fonctions, ces divers appareils doivent être pourvus d'une interface interactive permettant au conducteur de dialoguer et d'échanger des informations avec son appareil. Or, ce type d'interaction nécessite l'attention du conducteur, ce qui présente un risque au niveau de la sécurité lorsque ces interventions sont faites au cours du déplacement du véhicule, dans la mesure où elles amènent le conducteur à détourner son attention de la conduite. C'est pourquoi les réglementations européennes en matière de conception de systèmes embarqués sur des véhicules, imposent aux concepteurs de tels systèmes que ces derniers ne requièrent pas d'interactions longues qui ne soient susceptibles d'être interrompues, et que certaines fonctions d'acquisition de données soient désactivées lorsque le véhicule est en cours de déplacement.
- De façon synthétique, ces systèmes de navigation embarqués doivent donc satisfaire à deux conditions apparemment contradictoires, à savoir, d'une part, permettre au conducteur de dialoguer de façon aisée et détaillée avec le système, et, d'autre part, présenter une interface utilisateur particulièrement simplifiée afin de réduire au minimum le niveau d'attention et les manipulations requises par celui-ci.
- Dans le brevet
FR 2 896 462 US 5 182 555 divulgue également un système de signalisation d'un niveau de risque de perturbation routière dans une zone prédéterminée où la collecte des informations se fait au moyen de capteurs sur le véhicule. - Cependant, dans aucun des différents systèmes d'aide à la conduite existant, il n'est fourni à l'utilisateur une indication lui permettant de prendre en compte la pertinence des informations qui lui sont communiquées ainsi que la probabilité de rencontrer une perturbation déterminée. Or, il s'agit là pour lui d'une information essentielle pour la sécurité de sa conduite.
- La présente invention a pour but de remédier à cet inconvénient en proposant un système d'aide personnalisée à la conduite d'un véhicule qui intègre une fonction d'information du conducteur sur la fiabilité des informations qui lui sont communiquées.
- La présente invention a ainsi pour objet un système de signalisation d'un niveau de risque de présence d'une perturbation routière dans une zone de présence déterminée d'un véhicule, du type comportant:
- un dispositif embarqué dans un véhicule comprenant:
- des moyens de localisation du véhicule, notamment de type GPS,
- des moyens de signalisation aptes à permettre à l'utilisateur associé au véhicule d'envoyer au serveur, via des moyens de communication à distance, les coordonnées de localisation d'une perturbation rencontrée,
- des moyens de gestion, notamment de type processeur,
- un serveur distant comprenant :
- des moyens aptes à assurer la localisation d'une perturbation signalée par le dispositif embarqué à partir des informations communiquées par celui-ci,
- des moyens de gestion, notamment de type processeur, le dispositif embarqué et le serveur distant comportant des moyens de communication à distance bidirectionnels, caractérisé en ce que :
- le dispositif embarqué comporte des moyens d'interrogation de l'utilisateur associé au véhicule sur la présence d'une perturbation,
- le dispositif embarqué comporte des moyens aptes à permettre à l'utilisateur de répondre à cette interrogation,
- le dispositif embarqué comporte des moyens aptes à communiquer au serveur distant le contenu de la réponse, ou la non réponse de l'utilisateur,
- le serveur distant comporte des moyens d'analyse de cette réponse ou de cette non réponse aptes à générer un paramètre d'indice de fiabilité de l'utilisateur associé au véhicule,
- le dispositif embarqué comporte des moyens aptes à communiquer à l'utilisateur du véhicule, notamment sous forme visuelle et/ou sonore, une information en relation avec un paramètre d'indice de fiabilité du ou des utilisateurs qui sont passés « sur » cette perturbation dans un délai donné.
- Préférentiellement, le serveur distant comportera des moyens de stockage des indices de fiabilité des utilisateurs et le dispositif embarqué comportera des moyens aptes à activer l'interrogation sur la présence de la perturbation sitôt après le passage du véhicule « sur » cette dernière.
- Par ailleurs, les moyens d'interrogation et les moyens de réponse pourront être de tout type et notamment de type vocal ou visuel.
- Le serveur distant pourra comporter des moyens aptes à transmettre au dispositif embarqué le paramètre d'indice de fiabilité de l'utilisateur ayant signalé ou confirmé une perturbation, et/ou le paramètre d'indice de fiabilité moyen de plusieurs utilisateurs ayant signalé ou confirmé une même perturbation.
- Avantageusement, le serveur distant comportera des moyens de calcul aptes à déterminer, à partir de l'indice de fiabilité d'un utilisateur, ou à partir de l'indice de fiabilité moyen de plusieurs utilisateurs ayant signalé ou confirmé une même perturbation, une information quant à la fiabilité de l'information de présence d'une perturbation.
- Suivant l'invention, le serveur distant comportera une base de données renfermant la localisation de perturbations, dites potentielles, qui existent de façon statistique en une même zone routière déterminée, ainsi que la probabilité de présence en cette localisation de celles-ci ainsi que, éventuellement, à une date et/ou à un instant déterminé ainsi que des moyens dé mesure du temps d'utilisation de celui-ci par un utilisateur sur une période de temps déterminée, et notamment une journée.
- Afin de permettre un traitement différé des perturbations signalées, le serveur distant comportera une base de données apte à enregistrer toutes les perturbations signalées par ses utilisateurs pendant ladite période. Il comportera par ailleurs des moyens de calcul aptes à moduler la probabilité de présence d'une perturbation par le nombre des utilisateurs ou par l'indice de fiabilité de ces derniers qui sont passés « sur » cette perturbation dans une période de temps écoulé, par exemple une demi-heure.
- Afin d'améliorer la lisibilité de l'information communiquée à l'utilisateur du véhicule, le serveur distant comportera des moyens aptes à générer une information caractéristique de la synthèse des différents paramètres en mesure d'influer sur la probabilité de présence d'une perturbation et éventuellement des moyens aptes à transformer cette information de probabilité de présence sous forme d'au moins un signal. Le dispositif embarqué comportera quant à lui des moyens d'affichage dudit signal sur un écran. Avantageusement, le signal sera constitué d'un signe ou d'un ensemble de signes dont la couleur sera fonction du niveau de la probabilité de présence de la perturbation. Afin d'attirer facilement l'attention de l'utilisateur du véhicule, ladite couleur pourra occuper plus de la moitié de la surface de l'écran d'affichage.
- Par ailleurs, le serveur distant comprendra des moyens aptes à déterminer le caractère répétitif de perturbations signalées et à calculer pour un lieu et un instant donnés la probabilité de présence de ces perturbations dites « potentielles » et comprendra éventuellement des moyens permettant de les moduler, notamment en prenant en compte le nombre de véhicules qui sont passés sur une perturbation potentielle sans la signaler et l'indice de fiabilité des utilisateurs concernés. A cet effet, le serveur distant comportera des moyens aptes à compter le nombre de ces véhicules.
- Suivant l'invention, l'indice de fiabilité des utilisateurs pourra être constitué d'une moyenne arithmétique des indices de fiabilité des utilisateurs concernés.
- Par ailleurs, l'indice de fiabilité d'un utilisateur pourra être fonction d'un paramètre proportionnel au temps d'utilisation du système par celui-ci et/ou d'un paramètre proportionnel à son taux de participation et/ou à son taux de confirmation, pendant une période de temps donné.
- La présente invention a également pour objet un dispositif embarqué dans un véhicule, destiné à communiquer avec un serveur distant et comportant des moyens de localisation du véhicule, des moyens de communication avec le serveur distant, et des moyens aptes à transmettre à l'utilisateur du véhicule des informations en provenance du serveur distant relatives à la présence de perturbations routières, caractérisé en ce qu'il comporte :
- des moyens d'interrogation de l'utilisateur associé au véhicule sur la présence d'une perturbation,
- des moyens de réponse à cette interrogation,
- des moyens aptes à communiquer au serveur distant des signaux représentatifs du contenu de la réponse ou de la non réponse de l'utilisateur,
- des moyens aptes à fournir à l'utilisateur du véhicule des informations en provenance du serveur distant en relation avec un indice de fiabilité d'un utilisateur ayant signalé ou confirmé la présence d'une perturbation et/ou un indice de fiabilité moyen de plusieurs utilisateurs ayant signalé ou confirmé la présence d'une même perturbation.
- Le dispositif embarqué comportera avantageusement des moyens aptes à activer l'interrogation de la présence d'une perturbation sitôt après le passage du véhicule « sur » cette dernière. Ces moyens d'interrogation ainsi que les moyens de réponse pourront être de type vocal et/ou de type visuel.
- Par ailleurs, le dispositif embarqué pourra comporter des moyens aptes à informer l'utilisateur du véhicule de façon visuelle et/ou sonore de la probabilité de présence d'une perturbation.
- Préférentiellement, l'information pourra être délivrée à l'utilisateur sur des moyens d'affichage sous la forme d'un signe ou d'un ensemble de signes dont la couleur pourra être fonction du niveau de la probabilité de présence de la perturbation. Ces moyens d'affichage pourront être constitués d'un écran et ladite couleur pourra occuper plus de la moitié de la surface de celui-ci.
- On décrira ci-après, à titre d'exemple non limitatif, une forme d'exécution de la présente invention, en référence au dessin annexé sur lequel :
- la
figure 1 est une vue schématique montrant la constitution d'un système suivant l'invention, - la
figure 2 est un dessin schématique montrant des voies de circulation comportant des perturbations sur lesquelles sont représentés des véhicules gérés par un système suivant l'invention, - les
figures 3 à 8 sont des algorithmes figurant les différentes étapes de la mise en oeuvre du système suivant l'invention. - Le système suivant l'invention qui est représenté de façon schématique sur la
figure 1 comprend essentiellement un serveur distant 1 et un dispositif embarqué 3 sur un véhicule. - Le serveur 1 comporte deux ensembles de bases de données, à savoir un ensemble dit « statistique » et un ensemble dit « en temps réel ».
- L'ensemble de type statistique comprend d'une part une base de données 5, dite « base Perturbations » dans laquelle ont été stockées les coordonnées des diverses perturbations existant sur le réseau routier qui sont de type permanent ou quasi-permanent, telles que par exemple les bouchons, les radars fixes ou les zones en travaux ou les zones dans lesquelles des accidents se sont produits récemment.
- L'ensemble de type statistique comprend d'autre part une base de données 7, dite « base Utilisateurs » qui renferme des données de type statistique sur les utilisateurs de véhicules équipés d'un système suivant l'invention. Par ailleurs, la présente invention se proposant de prendre en compte le degré de pertinence des informations signalées au système par les utilisateurs, et ceci afin d'éviter que celui-ci ne prenne en considération des informations fantaisistes, que ces dernières le soient de façon volontaire ou involontaire, la base de données 7, qui est mise à jour périodiquement en traitement différé et notamment une fois par jour, et particulièrement la nuit, renferme un indice IF représentatif de la fiabilité des informations renvoyées par chacun des utilisateurs. Cet indice de fiabilité IF est établi par un processeur tout au long de l'utilisation du système, en fonction du comportement de l'utilisateur notamment lorsque ce dernier se trouve en présence d'une perturbation, ainsi que décrit ci-après.
- L'ensemble de type statistique comprend également une base de données 8 dite « base Géographique » qui permet de localiser les véhicules sur les axes routiers ainsi que les diverses perturbations, à partir de leurs coordonnées en latitude L et en longitude l.
- L'ensemble de type en temps réel comprend deux bases de données, à savoir une base de données 9 dite « base Localisation véhicules » dans laquelle est maintenue à jour la localisation de l'ensemble des véhicules mettant en oeuvre le système suivant l'invention, et une base de données 11 dite « basé Perturbations signalées » dans laquelle est stockée en temps réel la localisation des perturbations détectées par les utilisateurs et signalées par ces derniers au serveur 1 par des moyens de communication à distance ainsi qu'expliqué ci-après.
- Les bases statistique et en temps réel sont gérées par un processeur 13 auquel sont associés des moyens de filtrage 14 des informations qui sont reçues des diverses dispositifs, embarqués 3 sur les véhicules mettant en oeuvre le système suivant l'invention.
- La base 9 « Localisation véhicules » maintient à jour en temps réel la localisation, c'est-à-dire la latitude et la longitude de chacun des véhicules mettant en oeuvre le système ainsi que leur positionnement sur les voies de circulation après que le processeur 13 ait consulté la base de données 8 « Géographie ». Ces données ainsi que le trajet effectué par le véhicule dans un segment routier S donné et dans une dernière période de temps écoulé déterminée T sont périodiquement adressées par le dispositif embarqué 3 au serveur distant 1. Cette période de temps T peut par exemple être de l'ordre d'une demi-heure.
- Cette base de donnée est associée à des moyens de calcul du processeur 13 qui déterminent la voie A sur laquelle se déplace chacun des véhicules, le segment S de cette voie sur lequel se trouve le véhicule pendant ladite période de temps T, l'identité I du dispositif embarqué du véhicule, et l'heure H de passage du véhicule V dans le segment de voie S. On notera que, suivant l'invention, un segment S de voie, est constitué d'un tronçon pris sur la même voie par exemple entre deux limitations de vitesse différentes.
- Le processeur 13 est ainsi en mesure de déterminer combien de véhicules n et quels véhicules V1, V2, ... Vn sont passés par un lieu appartenant au segment S déterminé au cours de ladite dernière période de temps T et dans quelle direction D ces véhicules sont passés.
- La seconde base de données en temps réel 11 dite «base Perturbations signalées » comporte des moyens aptes à stocker les perturbations P1, P2, ... Pn qui sont signalées par les utilisateurs et à les classer en plusieurs catégories étant entendu qu'au cours du temps une perturbation a la possibilité d'évoluer d'une catégorie à une autre. Le processeur 13 est ainsi en mesure de gérer deux catégories principales de perturbations, à savoir des perturbations de type réel et des perturbations de type potentiel. Il fait ainsi appel aux catégories suivantes :
-
- perturbations en attente de confirmation: il s'agit de perturbations qui ont été signalées par un ou plusieurs utilisateurs dont l'indice de fiabilité IF n'est pas suffisant et qui sont conservées dans l'attente d'une confirmation. Ces perturbations ne sont pas prises en compte par le processeur,
- perturbations actives: il s'agit de perturbations signalées par un ou plusieurs utilisateurs et dont la présence a été confirmée. Ces perturbations sont destinées à être communiquées aux utilisateurs des véhicules et sont en conséquences prises en charge par le processeur ainsi qu'expliqué ci-après,
- perturbations désactivées : il s'agit de perturbations qui ont été actives et qui, suite à une intervention d'utilisateurs sont devenues inactives,
- Ce sont des perturbations qui, a priori, ne sont pas certaines, mais qui dépendent d'éléments extérieurs plus ou moins fortuits. Par exemple, dans une zone déterminée on sait que les conditions climatiques font que l'on trouve souvent du brouillard, ou du verglas, par exemple en une période donnée de l'année on sait que celui-ci se produit 3 jours sur 10. On aura ainsi pour cette période de l'année 30% de chances d'avoir cette perturbation dans cette zone. Sa probabilité de présence P sera ainsi de 30%.
- La base de données 11 « base Perturbations signalées » est associée à des moyens de calcul du processeur 13 qui ont pour fonction de gérer la sauvegarde des données renvoyées en temps réel par les utilisateurs.
- Ainsi que représenté sur la
figure 1 chacun des dispositifs embarqués 3 est essentiellement constitué d'un processeur 15 dont le rôle est de gérer des moyens de positionnement, notamment constitués d'un récepteur GPS 19, une mémoire RAM 17, et des moyens de communication à distance, notamment constitués d'un modem GPRS, qui permettent le dialogue avec le serveur distant 1. - Le dispositif embarqué 3 comporte également des moyens d'adressage constitués notamment d'une série de boutons 24 qui peuvent être regroupés de façon à former un clavier 23a, au moyen desquels l'utilisateur d'un véhicule envoie des informations et des instructions au serveur distant 1 via un modem 21 et un réseau GPRS 4. Ces moyens d'adressage peuvent également être de type vocal et être constitués d'un micro 23b.
- Le dispositif embarqué 3 comporte également des moyens permettant à l'utilisateur de recevoir des informations du serveur distant 1. Ces informations qui sont gérées par le processeur 15 peuvent être délivrées de façon visuelle sur un afficheur 25a et/ou de façon sonore au moyen d'un haut-parleur 25b.
- Plus précisément, ainsi que représenté sur l'algorithme de la
figure 3 , le récepteur GPS 19 de chacun des dispositifs embarqués détermine en temps réel la localisation du véhicule sur lequel il est installé, c'ést-à-dire la position, le cap et la vitesse de celui-ci et transmet régulièrement, par exemple toutes les minutes, ces informations au serveur distant 1 par le modem GPS 21. - A réception, ainsi que représenté sur l'algorithme de la
figure 4 , le serveur distant 1 identifie la voie routière A sur laquelle se trouve le véhicule V, par comparaison entre la localisation faite par le système embarqué et les informations contenues dans la base de données 8 « base Géographique » et définit le segment de voie S sur lequel se trouve le véhicule. Le serveur distant 1 détermine également la direction D du trajet effectué par le véhicule V sur le segment S. - Le serveur distant 1 recherche ensuite, sur la voie routière localisée A ainsi que sur les voies A1, A2, ...An en relation avec celle-ci, (à savoir les voies A1 et A2 sur la
figure 2 ) les perturbations P1, P2, ... Pn susceptibles d'exister dans un rayon de surveillance R déterminé, par exemple de l'ordre de 20 km autour de la position du véhicule V (à savoir les perturbations P1 et P2 sur lafigure 2 , P1 étant par exemple une nouvelle limitation de vitesse et P2 étant par exemple un banc de brouillard). Il transmet alors au véhicule V, via ses moyens de communication 20 et le modem GPRS 21 de ce dernier, au travers du réseau de téléphonie mobile, des informations et notamment : - la localisation des perturbations détectées P1 et P2 qui se trouvent dans le rayon de surveillance R et la nature de celles-ci qui sont contenues dans les bases de données 5 « base Perturbations » et 11 « Perturbations signalées » ,
- les consignes éventuellement associées à ces perturbations,
- l'indice de fiabilité IF des utilisateurs du système qui sont précédemment passés « sur » ces perturbations, dans le délai de temps défini T, notamment de l'ordre de 30 minutes (à savoir dans le cas présent les véhicules V1, V2, V3, V4) et le nombre de ces derniers,
- la probabilité contenue dans la base de données 5 « base Perturbations » concernant les perturbations potentielles. Il signalera notamment la perturbation P2 en supposant que celle-ci est constituée par du brouillard qui se manifeste à cette heure-ci en cette saison un jour sur trois soit une probabilité de 30%,
- A réception, ainsi que représenté sur la
figure 5 , le dispositif embarqué 3 du véhicule V stocke toutes ces informations dans sa mémoire RAM 17 afin quelles puissent être exploitées plus tard par son processeur 15 lorsque le véhicule V sera à une distance d'alerte r d'une perturbation. - Le processeur fait une distinction en ce qui concerne la gestion des perturbations de type réel et la gestion des perturbations de type potentiel telles que définies précédemment.
- Si le véhicule V se rapproche à une distance d'alerte r d'une perturbation stockée dans sa mémoire RAM 17, notamment de l'ordre de 500 m, le processeur 15 commande à ses moyens d'information, tels que l'afficheur 25a et/ou le haut-parleur 25b, de fournir les informations suivantes :
- la nature de la perturbation : accident, embouteillage, radar fixe ou mobile, verglas, brouillard, etc ... ,
- une consigne en rapport avec cette perturbation,
- l'heure de la dernière observation,
- le nombre n des utilisateurs V1, V2, ... Vn qui sont passés « sur » ladite perturbation (à savoir quatre véhicules dans l'exemple de la
figure 2 soit les véhicules V1, V2, V3, V4), - l'indice de fiabilité moyen I m des utilisateurs qui sont passés « sur » cette perturbation.
- Une fois que le récepteur GPS 19 du dispositif embarqué 3 localise la position du véhicule V sur lequel il est installé après la position de la perturbation concernée, le processeur 15 génère un message sur l'afficheur 25b du type « PERTURBATION TOUJOURS PRESENTE ? » et propose à l'utilisateur un choix en OUI/NON pendant une durée prédéfinie, notamment de l'ordre de 15 secondes. Le processeur 15 remonte la réponse, ou la non réponse, vers le serveur distant 1 où elle sera utilisée ultérieurement, en traitement différé, par le processeur 13 pour mettre à jour l'indice de fiabilité qui est attribué à chaque utilisateur du système suivant l'invention et qui est stocké dans la base de données 7 « base Utilisateur » et qui évolue au cours du temps d'utilisation et ceci en fonction du comportement de cet utilisateur vis-à-vis du système.
- A réception, ainsi que représenté sur l'algorithme de la
figure 6 , le processeur 13 met d'abord en mémoire dans la base de données 11 « base Perturbations signalées » la réponse reçue de l'utilisateur, ou la non réponse de celui-ci, puis il consulte la base de données 7 « base Utilisateurs » pour en extraire l'indice de fiabilité IF de l'utilisateur associé au véhicule V. Si celui-ci a un indice de fiabilité IF supérieur à un indice de seuil I s , il prend en compte l'information envoyée par l'utilisateur, si bien que si ce dernier a infirmé la présence de la perturbation, le processeur désactive cette dernière dans la base 11 « base Perturbations signalées» et un nouveau véhicule se présentant sur le même segment de voie S ne se verra plus signifier cette perturbation. Si au contraire l'utilisateur du véhicule V confirme la perturbation celle-ci est laissée comme active. - Si par contre l'indice de fiabilité IF de l'utilisateur se situe au-dessous de l'indice de seuil I s , le processeur met l'information en attente jusqu'à ce qu'un nouvel utilisateur vienne confirmer l'information du premier. Si ce nouvel utilisateur confirme l'information du premier et si la somme de leurs indices de fiabilité respectifs dépasse le seuil de fiabilité Is, alors l'information est confirmée et la perturbation est déclarée comme non active.
- Si l'utilisateur ne répond pas à la question cela signifie qu'il ne souhaite pas participer pleinement au système et cette non réponse est prise en compte par le processeur 13 et mise en mémoire dans la base de données 11 de façon que, lors du traitement différé périodique des différentes informations remontées vers le serveur distant au cours d'une période de temps, par exemple une journée, elle puisse être prise en compte par le processeur pour diminuer l'indice de fiabilité IF de l'utilisateur concerné.
- On rappellera qu'une perturbation dite potentielle est une perturbation dont on a constaté la présence à plusieurs reprises à un certain endroit à une certaine date et à une certaine heure. Il y a donc une probabilité P qu'un utilisateur qui se trouve en cet endroit au même instant la rencontre également.
- Le processeur du dispositif suivant l'invention dispose de moyens de filtrage 14 qui sont destinés à moduler cette probabilité en fonction d'une part du nombre d'utilisateurs n p qui adhèrent au présent système et qui sont passés « sur » la perturbation dans un passé récent, de l'ordre par exemple de la dernière demi-heure, et qui ne l'ont pas signalée, et d'autre part de l'indice de fiabilité IF de ces utilisateurs. Préférentiellement, les moyens de filtrage 14 établissent une moyenne arithmétique IF m des différents indices de fiabilité IF des utilisateurs concernés et l'on a :

- Suivant l'invention, le processeur considère que la probabilité réelle P r de rencontrer une perturbation potentielle est égale à la probabilité de présence P de celle-ci divisée par le nombre d'utilisateurs np qui sont passés « sur » la perturbation dans un passé récent sans la signaler divisée par l'indice de fiabilité moyen de ces utilisateurs. On a ainsi :

- Où α représente un coefficient d'ajustement dont la valeur sera déterminée par l'expérience, notamment par une méthode de type itérative.
- Ainsi que montré sur l'algorithme de la
figure 5 , si le processeur 15 du dispositif embarqué 3 détecte en consultant sa mémoire RAM 17 qu'une perturbation potentielle existe à l'intérieur de la distance d'alerte r devant le véhicule V, il procède alors au calcul de l'indice de fiabilité moyen IFm puis au calcul de la probabilité réelle P r ainsi qu'expliqué précédemment. Enfin le processeur procède à l'affichage sur l'afficheur 25a et/ou au moyen du haut-parleur 25b des informations suivantes : - nature de la perturbation : accident, embouteillage, radar fixe ou mobile,
- localisation de la perturbation
- consigne en rapport avec cette perturbation,
- probabilité P r de rencontrer la perturbation lorsqu'il s'agit d'une perturbation potentielle,
- indice de fiabilité moyen IF m , des utilisateurs concernés.
- Suivant l'invention, les données en temps réel proviennent des utilisateurs qui, au cours de leur trajets, signalent les perturbations qu'ils sont amenés à rencontrer. Ainsi, comme représenté sur l'algorithme de la
figure 7 , lorsqu'un utilisateur rencontre une perturbation, il actionne alors un bouton 24 appartenant aux moyens de signalisation, ce qui a pour effet d'envoyer un signal via le modem GPRS 21 au serveur distant 1. Ce signal comporte plusieurs composantes, à savoir une composante propre à la perturbation, une composante propre à sa localisation et une composante d'identification qui permet au processeur 13 de savoir de quel utilisateur l'information provient. - Le processeur 13 sauvegarde d'abord ces informations dans la base 11 « base Perturbations Signalées », puis consulte la base de données 7 « base Utilisateurs » afin de connaître l'indice de fiabilité IF associé à l'utilisateur ayant émis le signal.
- Si cet indice de fiabilité est supérieur à la valeur seuil I s , alors le processeur 13 prend en compte l'information de perturbation qui lui a été transmise et la stocke en mémoire dans la base de données 11 « base Perturbations signalées » où elle est classée dans la catégorie des perturbations « actives », si bien que cette information sera communiquée à tout utilisateur d'un véhicule entrant dans le rayon de surveillance R de la voie A où elle a été constatée.
- Si l'indice de fiabilité de l'utilisateur ayant signalé la perturbation est inférieur au seuil I s , alors le processeur 13 classe l'information dans la base de données 11 « base Perturbations signalées » dans la catégorie « en attente de confirmation », et attend une confirmation d'un autre utilisateur afin de voir si les indices de fiabilité en attente ont un niveau suffisant pour faire passer l'information dans la catégorie « active ».
- Dans une variante de mise en oeuvre de la présente invention, l'utilisateur dispose de la possibilité de paramétrer les conditions suivant lesquelles il souhaite être alerté des perturbations de type potentiel.
- Dans un mode de mise en oeuvre de la présente invention, la mise à jour des indices de fiabilité des utilisateurs du système se fera préférentiellement de façon périodique en temps différé préférentiellement une fois par jour et notamment la nuit.
- On a représenté sur l'algorithme de la
figure 8 les diverses opérations qui sont menées en temps différé par le serveur à distance et plus spécifiquement par son processeur 13. - Tout d'abord celui-ci extrait de la base de données 11 « base Perturbations signalées » les données qui ont été stockées pendant la dernière période de temps de référence, notamment le dernier mois, puis procède à un tri de celles-ci par utilisateur. Ensuite, pour chacun de ceux-ci, le processeur met à jour le temps d'utilisation du système et le stocke dans la base de données 7 « base Utilisateurs ». Ensuite, si l'utilisateur à signalé des perturbations existantes et/ou a rencontré des perturbations, le processeur met à jour dans la base de données 7 « base Utilisateurs », le taux de participation de l'utilisateur ainsi que son taux de confirmations de perturbations qu'il a rencontrées.
- Une fois la mise à jour de ces trois paramètres réalisée, l'indice de fiabilité IF de cet utilisateur est calculé et mis à jour au moyen de la formule :

où α, ß, et γ sont des paramètres d'ajustement basés sur l'expérience et qui viennent pondérer lés paramètres entre eux. - Le processeur procède ainsi pour chacun des utilisateurs ayant utilisé le système suivant l'invention dans la période de temps du mois.
Claims (32)
- Système de signalisation d'un niveau de risque de présence d'une perturbation routière dans une zone de présence déterminée d'un véhicule, du type comportant:- un dispositif embarqué (3) dans un véhicule (V) comprenant :des moyens (19) de localisation du véhicule, notamment de type GPS,des moyens (23a, 23b) de signalisation aptes à permettre à l'utilisateur associé au véhicule (V) d'envoyer au serveur (1), via des moyens de communication à distance (21), les coordonnées (L,1) de localisation d'une perturbation rencontrée,des moyens de gestion (13), notamment de type processeur,- un serveur distant (1) comprenant:le dispositif embarqué (3) et le serveur distant (1) comportant des moyens de communication à distance bidirectionnels (21, 20),des moyens aptes à assurer la localisation d'une perturbation signalée par le dispositif embarqué (3) à partir des informations communiquées par celui-ci,des moyens de gestion (15), notamment de type processeur,
caractérisé en ce que:- le dispositif embarqué (3) comporte des moyens d'interrogation (25a, 25b) de l'utilisateur associé au véhicule (V) sur la présence d'une perturbation,- le dispositif embarqué (3) comporte des moyens de réponse (23a, 23b) aptes à permettre à l'utilisateur de répondre à cette interrogation,- le dispositif embarqué (3) comporte des moyens aptes à communiquer au serveur distant (1) le contenu de la réponse, ou la non réponse de l'utilisateur,- le serveur distant (1) comporte des moyens d'analyse (13, 14) de cette réponse ou de cette non réponse aptes à générer un indice de fiabilité (IF) de l'utilisateur associé au véhicule (V),- le dispositif embarqué (3) comporte des moyens aptes à communiquer a l'utilisateur du véhicule, notamment sous forme visuelle (25a) et/ou sonore (25b), une information en relation avec un paramètre d'indice de fiabilité (I F) du ou des utilisateurs qui sont passés « sur » cette perturbation dans un délai donné (t). - Système suivant la revendication 1, caractérisé en ce que le serveur distant (1) comporte des moyens de stockage (7) des indices de fiabilité (I F) des utilisateurs.
- Système suivant l'une des revendications 1 ou 2, caractérisé en ce que le dispositif embarqué (3) comporte des moyens aptes à activer l'interrogation sur la présence de la perturbation sitôt après le passage du véhicule « sur » cette dernière.
- Système suivant l'une des revendications 1 à 3, caractérisé en ce que les moyens d'interrogation (25b) sont de type vocal.
- Système suivant l'une des revendications précédentes, caractérisé en ce que les moyens d'interrogation (25a) sont de type visuel.
- Système suivant l'une des revendications précédentes, caractérisé en ce que les moyens de réponse (23b) sont de type vocal.
- Système suivant l'une des revendications précédentes, caractérisé en ce que les moyens de réponse (23a) comprennent au moins un bouton de commande (24).
- Système suivant l'une des revendications précédentes, caractérisé en ce que le serveur distant (1) comporte des moyens (20) aptes à transmettre au dispositif embarqué (3) l'indice de fiabilité (IF) de l'utilisateur ayant signalé ou confirmé une perturbation, et/ou l'indice de fiabilité moyen (IFm) de plusieurs utilisateurs ayant signalé ou confirmé une même perturbation.
- Système suivant l'une des revendications précédentes, caractérisé en ce que le serveur distant (1) comporte des moyens de calcul (13) aptes à déterminer, à partir de l'indice de fiabilité (IF) d'un utilisateur, ou à partir de l'indice de fiabilité moyen (IFm) de plusieurs utilisateurs, ayant signalé ou confirmé une même perturbation, une information quant à la fiabilité de l'information de présence d'une perturbation.
- Système suivant l'une des revendications précédentes, caractérisé en ce que le serveur distant (1) comporte une base de données (5) renfermant la localisation de perturbations, dites potentielles, qui existent de façon statistique en une même zone routière déterminée, ainsi que la probabilité de présence en cette localisation de celles-ci ainsi que, éventuellement, à une date et/ou à un instant déterminé.
- Système suivant l'une des revendications précédentes, caractérisé en ce que le serveur distant (1) comporte des moyens de mesure du temps d'utilisation de celui-ci par un utilisateur.
- Système suivant la revendication 11, caractérisé en ce que la mesure du temps d'utilisation s'effectue sur une période de temps (T) déterminée, notamment une journée ou un mois.
- Système suivant la revendication 12, caractérisé en ce qu'il comporte une base de données (11) apte à enregistrer toutes les perturbations signalées par ses utilisateurs pendant ladite période de temps (T).
- Système suivant la revendication précédente, caractérisé en ce que le serveur distant (1) comporte des moyens de calcul (14) aptes à moduler la probabilité de présence (P) d'une perturbation par le nombre (n) des utilisateurs et/ou par l'indice de fiabilité de ces derniers qui sont passés « sur » cette perturbation dans une période de temps écoulé, par exemple une demi-heure.
- Système suivant la revendication 14, caractérisé en ce que le serveur distant (1) comporte des moyens aptes à générer une information caractéristique de la synthèse des différents paramètres en mesure d'influer sur la probabilité (P) de présence d'une perturbation.
- Système suivant la revendication 15, caractérisé en ce que le serveur distant (1) comporte des moyens aptes à transformer cette information de probabilité de présence (P) sous forme d'au moins un signal.
- Système suivant la revendication 16, caractérisé en ce que le dispositif embarqué (3) comporte des moyens d'affichage dudit signal sur un écran (25a).
- Système suivant l'une des revendications précédentes, caractérisé en ce que le serveur distant (1) comprend des moyens aptes à déterminer le caractère répétitif de perturbations signalées et à calculer pour un lieu et un instant donné la probabilité de présence (P) de ces perturbations dites « potentielles ».
- Système suivant la revendication 18, caractérisé en ce que le serveur distant (1) comprend des moyens aptes à moduler la probabilité de présence (P) des perturbations potentielles.
- Système suivant l'une des revendications 18 ou 19, caractérisé en ce que le serveur distant (1) comporte des moyens aptes à compter le nombre (np) de véhicules qui sont passés sur une perturbation potentielle sans la signaler.
- Système suivant l'une des revendications 19 ou 20, caractérisé en ce que les moyens aptes à moduler la probabilité de présence (P) des perturbations potentielles prennent en compte ledit nombre (np) de véhicules et l'indice de fiabilité (IF) des utilisateurs.
- Système suivant la revendication 21, caractérisé en ce que l'indice de fiabilité des utilisateurs (IFm) est constitué d'une moyenne arithmétique des indices de fiabilité (IF) des utilisateurs.
- Système suivant l'une des revendications précédentes, caractérisé en ce que l'indice de fiabilité (IF) d'un utilisateur est fonction d'un paramètre proportionnel au temps d'utilisation du système par cet utilisateur pendant une période de temps (T) donné.
- Système suivant l'une des revendications précédentes, caractérisé en ce que l'indice de fiabilité (IF) d'un utilisateur est fonction d'un paramètre proportionnel au taux de participation par cet utilisateur pendant une période de temps (T) donné.
- Système suivant l'une des revendications précédentes, caractérisé en ce que l'indice de fiabilité (IF) d'un utilisateur est fonction d'un paramètre proportionnel au taux de confirmation par cet utilisateur pendant une période de temps (T) donné.
- Dispositif embarqué (3) dans un véhicule, destiné à communiquer avec un serveur distant (1) et comportant des moyens (19) de localisation du véhicule, des moyens de communication (21) avec le serveur distant (1), et des moyens aptes à transmettre à l'utilisateur du véhicule des informations en provenance du serveur distant relatives à la présence de perturbations routières, caractérisé en ce qu' il comporte :- des moyens d'interrogation (25a, 25b) de l'utilisateur associé au véhicule (V) sur la présence d'une perturbation,- des moyens de réponse (23a, 24, 23b) à cette interrogation,- des moyens aptes à communiquer au serveur distant (1) des signaux représentatifs du contenu de la réponse ou de la non réponse de l'utilisateur,- des moyens (25a, 25b) aptes à fournir à l'utilisateur du véhicule des informations en provenance du serveur distant (1) en relation avec un indice de fiabilité d'un utilisateur ayant signalé ou confirmé la présence d'une perturbation et/ou un indice de fiabilité moyen (IFm) de plusieurs utilisateurs ayant signalé ou confirmé la présence d'une même perturbation.
- Dispositif embarqué suivant la revendication 26, caractérisé en ce qu'il comporte des moyens aptes à activer l'interrogation de la présence d'une perturbation sitôt après le passage du véhicule « sur » cette dernière.
- Dispositif embarqué suivant l'une des revendications 26 ou 27, caractérisé en ce que les moyens d'interrogation sont de type vocal (25b).
- Dispositif embarqué suivant l'une des revendications 26 à 28, caractérisé en ce que les moyens d'interrogation (25a) sont de type visuel.
- Dispositif embarqué suivant l'une des revendications 26 à 29, caractérisé en ce que les moyens de réponse (23b) sont de type vocal.
- Dispositif embarqué suivant l'une des revendications 26 à 30, caractérisé en ce que les moyens de réponse (23a) comprennent au moins un bouton de commande (24).
- Dispositif embarqué suivant l'une des revendications 26 à 31, caractérisé en ce qu'il comporte des moyens aptes à informer l'utilisateur du véhicule de façon visuelle et/ou sonore de la probabilité de présence d'une perturbation.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL10801600T PL2504826T3 (pl) | 2009-11-25 | 2010-11-24 | Spersonalizowany system wsparcia prowadzenia pojazdu |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0905662A FR2953054B1 (fr) | 2009-11-25 | 2009-11-25 | Systeme d'aide personnalisee a la conduite d'un vehicule |
| PCT/FR2010/000780 WO2011064472A1 (fr) | 2009-11-25 | 2010-11-24 | Systeme d'aide personnalisee a la conduite d'un vehicule |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2504826A2 EP2504826A2 (fr) | 2012-10-03 |
| EP2504826B1 true EP2504826B1 (fr) | 2015-05-20 |
| EP2504826B8 EP2504826B8 (fr) | 2015-06-24 |
Family
ID=42194670
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10801600.7A Active EP2504826B8 (fr) | 2009-11-25 | 2010-11-24 | Systeme d'aide personnalisee a la conduite d'un vehicule |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US20130033384A1 (fr) |
| EP (1) | EP2504826B8 (fr) |
| KR (1) | KR101841043B1 (fr) |
| CN (1) | CN102640197B (fr) |
| CA (1) | CA2781811A1 (fr) |
| ES (1) | ES2545498T3 (fr) |
| FR (1) | FR2953054B1 (fr) |
| PL (1) | PL2504826T3 (fr) |
| PT (1) | PT2504826E (fr) |
| WO (1) | WO2011064472A1 (fr) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2982986B1 (fr) * | 2011-11-23 | 2013-11-15 | Wikango | Systeme electronique d'aide a la conduite |
| US20140278087A1 (en) * | 2013-03-14 | 2014-09-18 | Ford Global Technologies, Llc | Method and Apparatus for Predicting Times of High Driver Demand |
| FR3012240B1 (fr) * | 2013-10-18 | 2016-01-01 | Ineocom Idf | Systeme d'echange d'informations entre differents utilisateurs et differentes autorites |
| US9988037B2 (en) * | 2014-04-15 | 2018-06-05 | Ford Global Technologies, Llc | Driving scenario prediction and automatic vehicle setting adjustment |
| US10002470B2 (en) * | 2014-04-30 | 2018-06-19 | Ford Global Technologies, Llc | Method and apparatus for predictive driving demand modeling |
| US11128786B2 (en) * | 2014-11-21 | 2021-09-21 | Apple Inc. | Bending a circuit-bearing die |
| DE102015220821A1 (de) * | 2015-10-26 | 2017-04-27 | Robert Bosch Gmbh | Steuern eines Kraftfahrzeugs |
| WO2017180382A1 (fr) * | 2016-04-12 | 2017-10-19 | Pcms Holdings, Inc. | Système et procédé de validation de données dans un réseau de capteurs décentralisé |
| EP3475933A1 (fr) * | 2016-06-24 | 2019-05-01 | Swiss Reinsurance Company Ltd. | Véhicules automobiles autonomes ou partiellement autonomes à systèmes à risque contrôlé automatisés, et procédé correspondant |
| DE102016008365A1 (de) * | 2016-07-08 | 2018-01-11 | Audi Ag | Proaktive Steuerung eines Assistenzsystems eines Kraftfahrzeugs |
| WO2018046106A1 (fr) * | 2016-09-12 | 2018-03-15 | Telefonaktiebolaget Lm Ericsson (Publ) | Procédés, appareil et supports lisibles par ordinateur permettant de notifier des accidents de véhicule |
| EP3396320A1 (fr) * | 2017-04-27 | 2018-10-31 | Volvo Car Corporation | Détermination d'un ensemble de caractéristiques d'une zone de travaux routiers |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5182555A (en) * | 1990-07-26 | 1993-01-26 | Farradyne Systems, Inc. | Cell messaging process for an in-vehicle traffic congestion information system |
| JP2000504860A (ja) * | 1996-02-08 | 2000-04-18 | マンネスマン・アクチエンゲゼルシャフト | 交通状況に関するデータを収集するための方法及び装置 |
| JP4085500B2 (ja) * | 1999-01-29 | 2008-05-14 | 株式会社エクォス・リサーチ | 車両状況把握装置、エージェント装置、および、車両制御装置 |
| US7065494B1 (en) | 1999-06-25 | 2006-06-20 | Nicholas D. Evans | Electronic customer service and rating system and method |
| US7203721B1 (en) | 1999-10-08 | 2007-04-10 | At Road, Inc. | Portable browser device with voice recognition and feedback capability |
| US8321496B2 (en) | 1999-12-13 | 2012-11-27 | Half.Com, Inc. | User evaluation of content on distributed communication network |
| US20020035486A1 (en) | 2000-07-21 | 2002-03-21 | Huyn Nam Q. | Computerized clinical questionnaire with dynamically presented questions |
| US20020158922A1 (en) | 2001-04-05 | 2002-10-31 | Clark Richard L. | Portable real-time traffic information device and method |
| US7552081B2 (en) | 2001-06-29 | 2009-06-23 | International Business Machines Corporation | User rating system for online auctions |
| US7680796B2 (en) | 2003-09-03 | 2010-03-16 | Google, Inc. | Determining and/or using location information in an ad system |
| AU2004271567C1 (en) | 2003-09-03 | 2012-06-14 | Google Llc | Determining and/or using location information in an ad system |
| JP2005140521A (ja) | 2003-11-04 | 2005-06-02 | Pioneer Electronic Corp | 交通状況報知装置、そのシステム、その方法、そのプログラム、および、そのプログラムを記録した記録媒体 |
| WO2005055011A2 (fr) | 2003-11-29 | 2005-06-16 | American Board Of Family Medicine, Inc. | Architecture informatique et procede d'evaluation d'utilisateur |
| CN1799909A (zh) * | 2005-01-02 | 2006-07-12 | 傅建中 | 被动式汽车追尾预警避撞技术方案 |
| FR2890351B1 (fr) | 2005-09-02 | 2007-10-12 | Valeo Systemes Thermiques | Centrale de commande de bord pour vehicule automobile. |
| US7571029B2 (en) * | 2005-10-04 | 2009-08-04 | Gm Global Technology Operations, Inc. | Method and apparatus for reporting road conditions |
| FR2896462B1 (fr) * | 2006-01-23 | 2009-08-07 | Coyote System Sarl | Systeme et procede d'aide a la conduite d'un vehicule |
| EP1855245A1 (fr) | 2006-05-11 | 2007-11-14 | Deutsche Telekom AG | Procédé et système de détection d'utilisateur malhonnête dans un système d'estimation en ligne |
| US7609172B2 (en) | 2006-10-12 | 2009-10-27 | Garmin Ltd. | System and method for providing real-time traffic information |
| US20080088479A1 (en) | 2006-10-13 | 2008-04-17 | Toyota Engineering & Manufacturing North America, Inc. | Traffic light warning method and system |
| US9167305B2 (en) | 2007-01-03 | 2015-10-20 | Tivo Inc. | Authorable content rating system |
| US7982598B2 (en) | 2007-02-06 | 2011-07-19 | Access Co., Ltd. | Method for integrating user notifications and user alerts on an electronic device |
| CN101246643A (zh) * | 2007-02-16 | 2008-08-20 | 纪明志 | 交通工具自动分派方法与系统 |
| CN201025561Y (zh) * | 2007-02-27 | 2008-02-20 | 马军 | 高速公路车辆安全行驶主动警示系统 |
| US20120166232A1 (en) | 2008-05-14 | 2012-06-28 | Neubardt Seth L | Customer managed restaurant information system |
| US8762035B2 (en) | 2008-05-19 | 2014-06-24 | Waze Mobile Ltd. | System and method for realtime community information exchange |
| CN101414408A (zh) * | 2008-10-03 | 2009-04-22 | 邓湘 | 触发事件区域代码化智能交通系统 |
| CN101465059B (zh) * | 2008-12-31 | 2010-06-09 | 公安部交通管理科学研究所 | 城市道路交通安全态势鉴判预警系统 |
| US8312276B2 (en) | 2009-02-06 | 2012-11-13 | Industrial Technology Research Institute | Method for sending and receiving an evaluation of reputation in a social network |
| WO2012003188A1 (fr) | 2010-07-02 | 2012-01-05 | L-3 Communications Avionics Systems, Inc. | Décodeur de transpondeur |
-
2009
- 2009-11-25 FR FR0905662A patent/FR2953054B1/fr active Active
-
2010
- 2010-11-24 ES ES10801600.7T patent/ES2545498T3/es active Active
- 2010-11-24 CN CN201080053356.1A patent/CN102640197B/zh not_active Expired - Fee Related
- 2010-11-24 KR KR1020127013345A patent/KR101841043B1/ko active IP Right Grant
- 2010-11-24 WO PCT/FR2010/000780 patent/WO2011064472A1/fr active Application Filing
- 2010-11-24 PL PL10801600T patent/PL2504826T3/pl unknown
- 2010-11-24 US US13/511,931 patent/US20130033384A1/en not_active Abandoned
- 2010-11-24 PT PT108016007T patent/PT2504826E/pt unknown
- 2010-11-24 EP EP10801600.7A patent/EP2504826B8/fr active Active
- 2010-11-24 CA CA2781811A patent/CA2781811A1/fr not_active Abandoned
Non-Patent Citations (6)
| Title |
|---|
| "Film Mini Coyote", REPORTAGE RTBF, 26 June 2009 (2009-06-26) |
| "Stuffy 2605", FILM COYOTE 1, 31 August 2009 (2009-08-31) |
| NEPTIS: "Yanosik-F, Yanosik-R", TECHNICAL DOCUMENTATION, 8 February 2009 (2009-02-08), pages 1 - 19 |
| NEPTIS: "Yanosik-R", INSTRUCTION MANUAL, 18 May 2009 (2009-05-18), pages 1 - 8, XP055303980 |
| OBSŁUGA URZADZENIA, ET AL: "Instrukcja obsługi", USER MANUAL, NEPTIS S.A., 18 May 2009 (2009-05-18), pages 1 - 8, XP055460855, Retrieved from the Internet <URL:http://www.janserwis.pl/upload/instrukcje/instrukcjaobslugiyanosik.pdf> |
| YANOSIK.ORG: "Obstuga Yanosik", YOU TUBE, 19 May 2009 (2009-05-19), XP054976795, Retrieved from the Internet <URL:yanosik.org> |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2504826A2 (fr) | 2012-10-03 |
| KR101841043B1 (ko) | 2018-05-04 |
| US20130033384A1 (en) | 2013-02-07 |
| WO2011064472A1 (fr) | 2011-06-03 |
| FR2953054A1 (fr) | 2011-05-27 |
| EP2504826B8 (fr) | 2015-06-24 |
| PL2504826T3 (pl) | 2015-11-30 |
| WO2011064472A9 (fr) | 2011-07-28 |
| CN102640197B (zh) | 2015-07-15 |
| FR2953054B1 (fr) | 2012-01-06 |
| KR20120127572A (ko) | 2012-11-22 |
| CA2781811A1 (fr) | 2011-06-03 |
| CN102640197A (zh) | 2012-08-15 |
| PL10801600T1 (pl) | 2014-01-07 |
| ES2545498T3 (es) | 2015-09-11 |
| PT2504826E (pt) | 2015-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2504826B1 (fr) | Systeme d'aide personnalisee a la conduite d'un vehicule | |
| US9754484B2 (en) | Detection of traffic violations | |
| US7859392B2 (en) | System and method for monitoring and updating speed-by-street data | |
| EP2278573B1 (fr) | Évaluation des conditions de circulation routière au moyen de données provenant de sources differentes | |
| TWI627084B (zh) | 用於感測器驅動車輛遙測應用與服務之開發及部署的運算平台 | |
| FR2963149A1 (fr) | Procede d'amelioration de la fiabilite des indications de limitations de vitesse pour systemes embarques | |
| EP2940671A1 (fr) | Système et méthode pour détecter des conditions accidentogènes avec une voiture | |
| US20110084825A1 (en) | System and method for monitoring and communicating the actions of riders of group transportation | |
| EP1465136B1 (fr) | Procédé et dispositif embarqué d'aide au pilotage en l'absence de contrôle aerien | |
| WO2010133811A1 (fr) | Systeme de presignalisation pour une population de pietons ou utilisateurs de vehicule | |
| WO2020086026A2 (fr) | Surveillance, contrôle et rapport d'actions d'un conducteur par suivi automatique de règles de la circulation | |
| US11781883B1 (en) | Method and apparatus for utilizing estimated patrol properties and historic patrol records | |
| FR2972283A1 (fr) | Systeme et procede de detection et d'information d'une situation de deplacement a contresens d'un vehicule | |
| FR2849251A1 (fr) | Dispositif et procede de controle du comportement de conduite des conducteurs de vehicules automobiles | |
| FR2718552A1 (fr) | Procédé et dispositif pour la localisation et l'acheminement de secours vers un véhicule accidenté. | |
| EP3900409A1 (fr) | Procédé et dispositif d'assistance d'un conducteur communiquant avec un interlocuteur distant | |
| WO2009106780A2 (fr) | Detection et referencement d'elements de parcours | |
| Patil et al. | Investigation on AI-Based Techniques in Applications for Detecting Fatal Traffic Accidents | |
| JP2019192102A (ja) | 車両運行評価装置及び車両運行評価方法 | |
| FR3121776A1 (fr) | Procédé de configuration d’une séquence sécuritaire d’un véhicule automobile en prévision d’un évènement distant. | |
| Chan et al. | Experimental design and evaluation of Networked Traveler field tests of safety applications in California | |
| Creaser et al. | Development and Evaluation of a Cellular Phone Based Teen Driver Support System. | |
| FR3132588A1 (fr) | Procédé d’élaboration d’un horizon artificiel | |
| FR2831982A1 (fr) | Procede et dispositif de suivi, d'analyse, de synthese, de stockage et de transfert de comportement de conduite d'un mobile | |
| WO2016097056A1 (fr) | Procédé de détection de comportements atypiques |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20120511 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| DAX | Request for extension of the european patent (deleted) | ||
| 17Q | First examination report despatched |
Effective date: 20130228 |
|
| TPAC | Observations filed by third parties |
Free format text: ORIGINAL CODE: EPIDOSNTIPA |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20141217 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 728083 Country of ref document: AT Kind code of ref document: T Effective date: 20150615 |
|
| RAP2 | Party data changed (patent owner data changed or rights of a patent transferred) |
Owner name: COYOTE SYSTEM |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602010024815 Country of ref document: DE Effective date: 20150702 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2545498 Country of ref document: ES Kind code of ref document: T3 Effective date: 20150911 |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20150817 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20150520 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150820 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150821 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150820 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150920 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 602010024815 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: RO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150520 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: CBN INVESTMENTS SP. Z O.O. Effective date: 20160222 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: LU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20151124 |
|
| PLAF | Information modified related to communication of a notice of opposition and request to file observations + time limit |
Free format text: ORIGINAL CODE: EPIDOSCOBS2 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20151124 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20101124 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: UEP Ref document number: 728083 Country of ref document: AT Kind code of ref document: T Effective date: 20150520 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 8 |
|
| PLAB | Opposition data, opponent's data or that of the opponent's representative modified |
Free format text: ORIGINAL CODE: 0009299OPPO |
|
| R26 | Opposition filed (corrected) |
Opponent name: CBN INVESTMENTS SP. Z O.O. Effective date: 20160222 |
|
| RDAF | Communication despatched that patent is revoked |
Free format text: ORIGINAL CODE: EPIDOSNREV1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20150520 |
|
| APBQ | Date of receipt of statement of grounds of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA3O |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R100 Ref document number: 602010024815 Country of ref document: DE |
|
| APBU | Appeal procedure closed |
Free format text: ORIGINAL CODE: EPIDOSNNOA9O |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: OPPOSITION REJECTED |
|
| PLBN | Opposition rejected |
Free format text: ORIGINAL CODE: 0009273 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: OPPOSITION REJECTED |
|
| 27O | Opposition rejected |
Effective date: 20210414 |
|
| POAG | Date of filing of petition for review recorded |
Free format text: ORIGINAL CODE: EPIDOSNPRV3 |
|
| POAH | Number of petition for review recorded |
Free format text: ORIGINAL CODE: EPIDOSNPRV1 |
|
| POAI | Petitioner in petition for review recorded |
Free format text: ORIGINAL CODE: EPIDOSNPRV2 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20221027 Year of fee payment: 13 Ref country code: BE Payment date: 20221125 Year of fee payment: 13 |
|
| POAK | Decision taken: petition for review obviously unsubstantiated |
Free format text: ORIGINAL CODE: 0009255 |
|
| PRVN | Petition for review not allowed |
Free format text: PETITION FOR REVIEW OBVIOUSLY UNSUBSTANTIATED Effective date: 20221205 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20231123 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20231201 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PT Payment date: 20231117 Year of fee payment: 14 Ref country code: IT Payment date: 20231129 Year of fee payment: 14 Ref country code: FR Payment date: 20231127 Year of fee payment: 14 Ref country code: DE Payment date: 20231121 Year of fee payment: 14 Ref country code: CH Payment date: 20231201 Year of fee payment: 14 Ref country code: AT Payment date: 20231124 Year of fee payment: 14 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20231117 Year of fee payment: 14 Ref country code: BE Payment date: 20231127 Year of fee payment: 14 |