EP2243881A2 - Anbauverdichter, der an einen Bagger ankuppelbar ist, sowie Verfahren zu seinem Betrieb - Google Patents
Anbauverdichter, der an einen Bagger ankuppelbar ist, sowie Verfahren zu seinem Betrieb Download PDFInfo
- Publication number
- EP2243881A2 EP2243881A2 EP10160020A EP10160020A EP2243881A2 EP 2243881 A2 EP2243881 A2 EP 2243881A2 EP 10160020 A EP10160020 A EP 10160020A EP 10160020 A EP10160020 A EP 10160020A EP 2243881 A2 EP2243881 A2 EP 2243881A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- mode
- drive shaft
- beat frequency
- frequency
- compressor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/22—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for consolidating or finishing laid-down unset materials
- E01C19/30—Tamping or vibrating apparatus other than rollers ; Devices for ramming individual paving elements
- E01C19/34—Power-driven rammers or tampers, e.g. air-hammer impacted shoes for ramming stone-sett paving; Hand-actuated ramming or tamping machines, e.g. tampers with manually hoisted dropping weight
- E01C19/38—Power-driven rammers or tampers, e.g. air-hammer impacted shoes for ramming stone-sett paving; Hand-actuated ramming or tamping machines, e.g. tampers with manually hoisted dropping weight with means specifically for generating vibrations, e.g. vibrating plate compactors, immersion vibrators
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D3/00—Improving or preserving soil or rock, e.g. preserving permafrost soil
- E02D3/02—Improving by compacting
- E02D3/046—Improving by compacting by tamping or vibrating, e.g. with auxiliary watering of the soil
- E02D3/074—Vibrating apparatus operating with systems involving rotary unbalanced masses
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/3604—Devices to connect tools to arms, booms or the like
- E02F3/3677—Devices to connect tools to arms, booms or the like allowing movement, e.g. rotation or translation, of the tool around or along another axis as the movement implied by the boom or arms, e.g. for tilting buckets
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/96—Dredgers; Soil-shifting machines mechanically-driven with arrangements for alternate or simultaneous use of different digging elements
- E02F3/967—Dredgers; Soil-shifting machines mechanically-driven with arrangements for alternate or simultaneous use of different digging elements of compacting-type tools
Definitions
- the invention relates to a cultivation compressor according to the preamble of claim 1.
- Cultivation compressors are known from the market, which are equipped with so-called reversible imbalance masses. These are arranged eccentrically on a drive shaft and can produce different imbalance amplitudes and thus impact forces as a function of the direction of rotation, with an approximately constant frequency.
- the imbalance system consists for example of three exciter masses, of which at least one is pivotable about a certain angular range on the axis in relation to the other rotating masses. Such an arrangement will be approximately in the DE 20 2005 006 059 U1 described.
- EP 1 411 175 B1 Cultivation compressor known whose vibration frequency is variable.
- the object of the invention is to improve the operation of a cultivation compressor.
- the inventively proposed at least three modes of operation of the add-on compactor is significantly expanded, because with him both cohesive soils and non-cohesive soils can be optimally compacted.
- the fact that there are three different discrete modes ensures that complex adjustment work is just as little required as a purely based on the user's feeling and thus in the end rather inaccurate setting.
- the three discrete modes of operation are designed to avoid resonances of any structures in the work area of the add-on compactor, such as buildings, bridges, pillars, and the like, to prevent them from being damaged.
- the invention is based on an imbalance, as it is commonly used in cultivation compressors, especially in versions that can be coupled to an excavator. It is advantageous if the cultivation compressor is driven and controlled by a hydraulic system, preferably of that of the excavator.
- a hydraulic system preferably of that of the excavator.
- rotating masses whose centers of gravity are eccentric to their axis of rotation, generate an imbalance. This can be based on Steiner's theorem for single or multiple rotating masses determine. It is provided that the rotating masses assume different end positions relative to one another depending on a direction of rotation of a drive shaft. This is achieved by a part of the rotating masses are rigidly coupled to the drive shaft, another part, however, is pivotable in a certain angular range around the drive shaft, for example in a range of about 180 degrees.
- the rigidly mounted on the drive shaft rotating masses may be positively or non-positively connected to the drive shaft, so for example via a gearing or a shrinkage.
- the unbalance generator could include one or more rigid masses rotating relative to the drive shaft and one or more rotating masses pivotable about the drive shaft in an angular range of up to about 180 degrees, and these could be positioned on the drive shaft so that imbalances would only occur in one the direction of rotation specific level occur.
- a symmetrization of the masses is achieved with respect to the rotational movement of the drive shaft and a staggering of the unbalance generator prevented.
- the bearings of the drive shaft are spared. At least such an imbalance generator therefore requires three rotating masses, a pivotable rotating mass approximately centrally on the drive shaft and two rigid rotating masses symmetrical to both sides.
- the unbalance generator can be structurally designed to be flexible when used is also taken into account by more than a total of three rotating masses.
- the change in the direction of rotation of the drive shaft can be easily achieved if, for example, the excavator, the direction of flow of the hydraulic motor driving hydraulic flow ("flow") is reversed.
- the beat rate in the second mode is between the beat rate in the first and third modes.
- the impact force in the second mode is below that of the other two modes, but with a slightly higher than the first mode beat rate. It is thus created, so to speak, a "soft mode" with low power and relatively low beating frequency, which is slightly increased for particularly safe avoidance of resonances over that of the first mode.
- the impact frequencies and eccentricities are coordinated so that the impact force of the add-on compactor in the first mode at least approximately corresponds to the impact force in the third mode, and preferably the impact force in the second mode is about 50 to 60% thereof. This allows a coverage of almost all possible scenarios.
- the beat frequency in the first mode between 30 and 40 Hz, preferably approximately 35 Hz
- in the second mode between 40 and 50 Hz, preferably at about 45 Hz
- in the third mode is between 55 and 65 Hz, preferably about 60 Hz.
- mode X1 a maximum eccentricity and thus a maximum imbalance is set, and the hydraulic current driving the hydraulic motor is set to give a beat frequency of about 35 Hz. This leads to an imbalance amplitude or impact force of about 80-100 kN, in particular of about 85 kN.
- the eccentricity or impulse is identical to the X2 operation.
- the hydraulic current driving the hydraulic motor is set to an increased value as compared to the X1 and X2 operations, resulting in a likewise increased beat frequency of about 60 Hz.
- a high imbalance amplitude or impact force similar to the X1 operation of approximately 80-100 kN, in particular approximately 85 kN, is achieved.
- the three operating modes X1, X2 and X3 can be adjusted solely by means of a changeover or switching of the hydraulic flow, the basic hydraulics of the excavator being structurally the same. This avoids excessive construction effort. Furthermore, the operating mode X1 represent a basic operating mode, is switched from the respectively in an X2 or X3 operation and, if necessary, switched back again.
- a particularly advantageous embodiment of the add-on compactor according to the invention provides that it comprises a preferably optical display device which indicates to the excavator operator during operation the current operating mode of the add-on compactor. This greatly simplifies handling.
- the display device may be designed such that it outputs a first signal associated with the respective operating mode-for example a continuous signal-when the mounted compressor is at least approximately in one of the at least three discrete operating modes, and a second signal assigned to the respective operating mode-for example an intermittent one Signal - emits when the attachment compressor is slightly outside of the corresponding operating mode.
- a first signal associated with the respective operating mode-for example a continuous signal-when the mounted compressor is at least approximately in one of the at least three discrete operating modes and a second signal assigned to the respective operating mode-for example an intermittent one Signal - emits when the attachment compressor is slightly outside of the corresponding operating mode.
- the display device is designed so that it emits the first signal when the current beat frequency is approximately within +/- 2.5 Hz of a desired frequency of the respective mode, and outputs the second signal when the current Rate deviates from the target frequency by more than about +/- 2.5 Hz, but less than about 5 Hz, and outputs a third or no signal when the current beat frequency deviates from the target frequency by more than about 5 Hz.
- the display device comprises three lighting devices, in particular LEDs, each of which one of the three operating modes is assigned.
- the design of the attachment compactor is simple if the impact frequency during operation can only be changed by the hydraulic flow provided by the excavator. On a present in or on the attachment compressor hydraulic valve can then be dispensed with.
- the cultivation compressor could include a switching means for changing the rotational speed of the drive shaft, which has a hydraulic switching valve, and which releases an additional volume flow in a first position and blocks the additional volume flow in a second position.
- This can be increased by connecting a parallel path of the flow to drive the hydraulic motor and its speed can be increased, resulting in a corresponding increase in the beat frequency.
- This variant can be realized without major structural changes even with existing versions of add-on compactors and thus relatively inexpensive. Possibly. this variant can even be retrofitted to existing add-on compactors.
- the switching means comprises a hydraulic switching valve which releases a first volume flow in a first position and a second volume flow in a second position. This results in a constructive simplification of the hydraulics of the add-on compactor in that a change in the volume flow can take place via a single element, and a switchable parallel path is not required.
- the mass is pivotable relative to the drive shaft and about an axis parallel to the drive shaft or coaxial axis from a first to a second position and back and at least one stop surface has, with a relative to the drive shaft but rigid in rubber-elastic stop buffer cooperates, wherein the stop surface is pivotally mounted about an axis parallel to the drive shaft.
- the bumpers are designed as progressively working structure damper of a material which consists wholly or partly of co-polyester elastomers and vulcanized on a metal surface of the rigid rotating masses.
- the stop buffers may be advantageous to design the stop buffers as (dense) hollow bodies, so that the air contained therein is involved in the energy absorption.
- the stop pin (mirror image at its ends) has a total of four stop surfaces, namely two for each of the two end positions of the pivotable rotating mass. This is one - based on a cylindrical basic shape of the stop pin - the largest possible area for the stop enabling zone. The larger the surface defining the stop, the lower the compressive stresses occurring in a stop in the stop buffers.
- the rotatability of the stop pin causes it automatically adjusted when hitting the stop buffer by itself so that the abutment surfaces of the stop pin touch the surfaces of the stop buffer at least approximately plane-parallel.
- the stop pin can thus rotate during the deformation phase of the stop buffer and thus maintain a flat contact of the stop surfaces on the stop buffer. It helps when the stopper bolt is rotatable about its axis only in a limited angular range, for example in an angular range of +/- 12 degrees.
- the limitation of the angular range prevents the stopper bolt from starting to rotate uncontrollably in a bore receiving it due to vibration.
- the movable mass comprises a plurality of sub-masses, which are accommodated in a receiving space whose volume is greater than the total volume of the sub-masses, and which has at least one boundary wall, which the sub-masses in the first rotational direction in a first position and forces in the second direction of rotation in a second position, wherein the total center of gravity of the sub-masses in the first position, a total of a different distance from the axis of rotation than in the second position.
- Such an unbalance generator works very wear and therefore has a long life.
- an attachment compressor 10 which comprises an imbalance generator 12.
- the unbalance generator 12 is connected to a hydraulic motor 13, which in turn is connected to the hydraulic system of an excavator, not shown.
- a compressor plate 14 is set in vibration during operation.
- the compressor plate 14 is connected via connecting elements 15 and buffer devices 16, in particular metal rubber buffer, with an upper part 17 of the add-on compactor 10 elastically.
- the cultivation compressor 10 can be fastened via a receptacle 18 to an excavator arm 19.
- the receptacle 18 may be formed as a quick-change system.
- the hydraulic motor 13 is connected in the embodiment shown with the interposition of a valve block 60 via hydraulic lines 21 and the receptacle 18 with the hydraulic system of the excavator. Via the valve block 60, the volume flow, which passes from the excavator to the hydraulic motor 13, can be adjusted in various ways, as described below with reference to the FIGS. 5 to 8 will be explained.
- the flow direction of the hydraulic flow to the hydraulic motor 13 is excavator side reversible.
- the volume flow can also be adjusted by the excavator, for example by the excavator operator correspondingly actuating a corresponding control element (accelerator pedal, control stick). This will be discussed in greater detail at the end of this description.
- FIG. 2 shows a view of a first embodiment of the unbalance generator 12 in a first mode with small imbalance amplitude:
- a drive shaft 30 To a drive shaft 30, two rigid rotating and with respect to a central axis of the drive shaft 30 eccentrically arranged masses 32a and 32b are rigidly coupled.
- a total of four hollow stop buffers 34 On radial shoulders (without reference numeral) of the rigid rotating masses 32a and 32b, a total of four hollow stop buffers 34 are arranged, for example by a vulcanization, of which in the perspective view of Figures 2 and 3 only two are visible, and their function will be explained in more detail below.
- the rotational axis of the mass 36 is coaxial with the drive shaft 30 by means of the rotating masses 32a and 32b which are rigid with respect to the drive shaft 30.
- the mass 36 can be pivoted relative to the drive shaft 30 and the two to the drive shaft 30 rigid masses 32a and 32b are brought into one of two end positions.
- FIG. 3 shows the imbalance generator 12 with the pivotable rotating mass 36 in the other of the two possible End positions:
- the mass 36 is seen in the axial direction of the drive shaft 30 mostly in the same alignment with the rigid rotating masses 32a and 32b arranged, so seen from the drive shaft 30 on the same side as the rigid rotating masses 32a and 32b, so that in the sum of all three masses 32a, 32b, 36 gives a relatively large imbalance.
- cooperating rotatable stop pin 40 is housed, which protrudes with its projecting ends on both sides via the receiving bore 38.
- Each projecting end has two oppositely arranged plane-parallel stop surfaces 42.
- two shaped holes 44 are visible in the pivotable rotating mass 36, which have a slot-like shape in their cross section.
- two cylindrical pins 46 are added, which are firmly anchored at its non-visible end in the stop pin 40. In this way, the stopper pin 40 is rotatable in the receiving bore 38 according to the geometry of the shaped holes 44 by a small area.
- the stop pin 40 rests by means of the stop surfaces 42 in the in FIG. 2 shown end position of the pivotable rotating mass 36 on the in the Figures 2 and 3 rear stop buffers 34.
- the stop pin 40 rests by means of the stop surfaces 42 in the in FIG. 3 shown end position of the pivotable rotating mass 36 on the in the Figures 2 and 3 front stop buffers 34. It is characterized by the rotatability of the stop pin 40 for a parallel at any time and thus large area Provided contact between the stop surfaces 42 and the stop buffers 34.
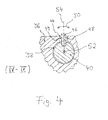
- FIG. 4 shows a cross section through that portion of the pivotable rotating mass 36 in which the holes 44 are present, wherein the cutting plane is orthogonal to the longitudinal axis of the drive shaft 30 and through the in FIG. 3 shown line IV-IV goes.
- the pins 46 are firmly anchored, for example, pressed or screwed.
- the pins 46 in the formed bore 44 limited by the size of the column 48, pivoted.
- the stopper pin 40 is limited by an angular range 50 with respect to a passing through its central axis 52 reference line 54 rotatably.
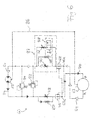
- FIG. 5 12 shows a schematic of the hydraulic circuit of the valve block 60 for operating the unbalance generator 12 in a first mode of operation.
- a pressurized flow stream 64 flows through various elements to the hydraulic motor 13.
- the white triangle symbols 64 indicate the pressurized main flow path.
- the hydraulic flow flows through a pressure-controlled check valve 76 and an adjustable flow control valve 78 to the hydraulic motor 13.
- the flow control valve 78 has the task of keeping the hydraulic flow equal pressure independent.
- Parallel to the flow control valve 78 is a check valve 80, which blocks to the hydraulic motor 13 out.
- two pressure limiting valves 82 and 84 are arranged in opposite directions, for example, to compensate for transient operating conditions, to allow about a pressure equalization and a controlled braking in the wake after switching off the hydraulic pump of the excavator.
- a leakage line 86 connects the hydraulic motor 13 directly to the quick coupling 62 for the return of any leakage currents.
- the hydraulic circuit 60 is shown in a so-called "X1" operation.
- X1 X1
- the switching valve 88 is closed. Hydraulic fluid flows via the check valve 76 and the flow control valve 78 to the hydraulic motor 13 and from there via the check valve 66 and the check valve 68 back.
- the pressure of the hydraulic flow at location 68a actuates the check valve 68. Without the use of the check valve 68, there would be a risk of cavitation of the hydraulic motor 13 when switching off.
- the unbalance generator 12 rotates in a first direction of rotation in which the pivotable rotating mass 36 moves in the in FIG. 3 shown position (large imbalance) and a speed of, for example, about 35 1 / sec is reached.
- the result is an impact force of, for example, about 90 kN.
- FIG. 6 shows the hydraulic circuit 60 at one opposite FIG. 5 reverse flow direction of the hydraulic flow, which is referred to as "X2" operation.
- X2 reverse flow direction of the hydraulic flow
- the flow stream 64 now flows via the check valve 68 and the flow control valve 70 to the hydraulic motor 13.
- the flow control valve 70 in turn has the task to keep the hydraulic flow equal pressure independent.
- the return flow 74 flows via the check valve 80 and the check valve 76 back to the now unpressurized return port P on the quick coupling 62.
- this X2 mode of the unbalance generator 12 rotates in a second rotational direction in which the pivotable rotating mass 36 in the in FIG. 2 shown position (small imbalance) and a speed of, for example, about 45 1 / sec is reached. It results in a power of, for example, about 50 kN.
- FIG. 7 shows the hydraulic circuit 60 in a third mode, referred to as "X3 mode".
- the flow direction of the hydraulic fluid and thus the direction of rotation of the unbalance generator 12 correspond FIG. 6 .
- the switching valve 88 is opened and increases, in addition to the flow through the flow control valve 70, the flow rate.
- the volume flow through the switching valve 88 to the volume flow through the flow control valve 70 in a ratio of 1: 2.
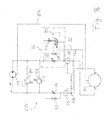
- FIG. 8 shows a schematic of a modified embodiment of a hydraulic circuit of the valve block 60 for operating and controlling the imbalance generator 12, in which, unlike the illustrations of FIGS. 5 to 7 , Instead of the switching valve 88, a pulse valve 90 is inserted in the hydraulic flow.
- the impulse valve can be opened or closed by means of a short hydraulic impulse ("ballpoint pen principle").
- a hydraulic control stream 92 is used, which is tapped at a suitable location on the pressurized branch downstream of the P-port.
- the pressure relief valves 82 and 84 may be set to other thresholds for operation with a pulse valve 90 than for operation with a switching valve 88. For example, the thresholds are increased by a factor of 1.75.
- FIG. 9 An alternative embodiment of an unbalance generator 12 is shown in FIG. 9 shown. It is true that such elements and areas that are functionally equivalent to elements and areas described in the preceding figures, the same reference numerals and are not explained again in detail.
- the unbalance generator 12 comprises a cylindrical or drum-shaped closed housing 94, which is arranged eccentrically about a drive shaft 30.
- a receiving space 96 is formed, which is limited inter alia by a hollow boundary wall 98, which extends approximately radially from the geometric center of the housing 94 outwardly.
- a certain number of balls 100th present which are also referred to as "sub-masses” and thus form an amorphous movable mass 36. If the housing 94 rotates clockwise around the drive shaft 30, the balls 100 will rotate into the in FIG. 9 shown forced position in which they have a relatively small distance from the drive shaft 30. The eccentricity is thus comparatively small. On the other hand, if the housing 94 rotates in the counterclockwise direction, the balls 100 are forced into the opposite position, in which they have a relatively large distance from the drive shaft 30. The eccentricity is thus comparatively large.
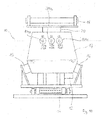
- the attachment compressor 10 has on an end face 102 of the upper part 17, a visual display device in the form of three lighting devices 104a, 104b and 104c, which are each formed by an array of multiple LEDs.
- the lighting device 104a illuminates continuously.
- the lighting device 104b illuminates continuously.
- the lighting device 104c illuminates continuously.
- the excavator operator sets the eccentricity by the direction of the hydraulic circuit.
- a beat frequency f is plotted over the time t.
- Fs denotes a desired beat frequency, which may be the desired beat frequency for the operating modes X1, X2 or X3.
- fa is a current beat frequency called.
- a first tolerance band 106 whose limits lie at a distance of df1 from the nominal beat frequency fs and a second tolerance band 108 whose limits lie at a distance of df2 from the nominal beat frequency fs is applied around the nominal beat frequency fs. where df2 is greater than df1.
- df1 is 2.5 Hz
- df2 is approximately 5 Hz. If the current beat frequency fa lies within the first tolerance band 106, the corresponding lighting device 104a, b or c lights up permanently. If the current beat frequency fa lies outside the first tolerance band 106, but still within the second tolerance band 108, the corresponding lighting device 104a, b or c lights up intermittently. If the current beat frequency fa also lies outside the second tolerance band 108, the corresponding lighting device 104a, b or c does not light at all.
- the display device 104 is coupled to a power supply, not shown, which includes, for example, a generator integrated in the attachment compressor 10, which is coupled either to the drive shaft 30 of the unbalance generator 12 or to a separate hydraulic motor.
- the display device 104 is controlled by an electronic, also not shown Signal acquisition and processing unit. This detects, for example, the current speed of the drive shaft 30 via a corresponding sensor and - for example, via the direction of rotation of the drive shaft 30 - also the current eccentricity.
- the display device for example, an LCD display, a colored display, a command display, or a transmission, for example, via Bluetooth to a display device in the cab of the excavator.
- a closed controlled system for example, even the establishment of a closed controlled system is conceivable.
- the display 104 described above both in an imbalance generator 12 with pivotable masses according to the FIGS. 2 to 4 as well as an unbalance generator 12 with a plurality of individual masses according to the FIG. 9 can be used.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Civil Engineering (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Agronomy & Crop Science (AREA)
- Architecture (AREA)
- Environmental & Geological Engineering (AREA)
- Soil Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Paleontology (AREA)
- Operation Control Of Excavators (AREA)
- Fluid-Pressure Circuits (AREA)
- Organic Low-Molecular-Weight Compounds And Preparation Thereof (AREA)
Abstract
Description
- Die Erfindung betrifft einen Anbauverdichter nach dem Oberbegriff des Anspruchs 1.
- Im Bereich der Verdichtungstechnik von Erdböden gibt es verschiedenste Anforderungen durch die Bodenart, die Kornform, der Korngrößenverteilung und durch den Wassergehalt. So erreicht man beispielsweise bei bindigen Böden ein gutes Verdichtungsergebnis, indem die Verdichtungsfrequenzen von eingesetzten Anbauverdichtern niedrig gehalten werden. Bei nichtbindigen, also sandigen Böden, wird hingegen eine hohe Verdichtungsfrequenz angestrebt, um eine gute Verdichtung zu erreichen. Darüber hinaus sind aus erschütterungstechnischer Sicht in innerstädtischen Bereichen höhere Erregerfrequenzen wünschenswert. Eigenfrequenzen von Geschossdecken liegen größtenteils in Bereichen zwischen 10 bis 30Hz (Hertz). Das Risiko von Resonanzeffekten ist bei höheren Frequenzen geringer.
- Zumeist werden hierbei exzentrisch rotierende Systeme eingesetzt. Eine Anordnung von Massen, die exzentrisch um eine Achse rotieren, führt nach physikalischen Gesetzmäßigkeiten zu einer radialen Zentrifugalkraft um diese Achse, mit einer bauartbedingten Unwuchtfrequenz und Unwuchtamplitude. Die so gebildeten dynamischen Kräfte werden über Platten in den Boden abgeleitet. Dadurch wird der zu verdichtende Boden angeregt, sich an seinen Korngrenzen zu verschieben und seine Dichte und somit seine Steifigkeit zu erhöhen.
- Vom Markt her sind Anbauverdichter bekannt, die mit so genannten reversierbaren Unwuchtmassen ausgestattet sind. Diese sind auf einer Antriebswelle exzentrisch angeordnet und können in Abhängigkeit von der Drehrichtung unterschiedliche Unwuchtamplituden und damit Schlagkräfte erzeugen, bei einer näherungsweise gleich bleibenden Frequenz. Das Unwuchtsystem besteht beispielsweise aus drei Erregermassen, wovon wenigstens eine um einen bestimmten Winkelbereich auf der Achse im Verhältnis zu den übrigen rotierenden Massen schwenkbar ist. Eine solche Anordnung wird etwa in der
DE 20 2005 006 059 U1 beschrieben. - Ferner sind beispielsweise aus
EP 1 411 175 B1 Anbauverdichter bekannt, deren Schwingfrequenz veränderbar ist. - Die Aufgabe der Erfindung ist es, den Betrieb eines Anbauverdichters zu verbessern.
- Diese Aufgabe wird durch einen Anbauverdichter nach Anspruch 1 gelöst. Vorteilhafte Weiterbildungen sind in den Unteransprüchen angegeben. Für die Erfindung wichtige Merkmale finden sich ferner in der nachfolgenden Beschreibung und in den Zeichnungen, wobei die Merkmale sowohl in Alleinstellung als auch in unterschiedlichen Kombinationen für die Erfindung wichtig sein können, ohne dass hierauf nochmals explizit hingewiesen wird.
- Durch die erfindungsgemäß vorgeschlagenen mindestens drei Betriebsarten wird der Einsatzbereich des Anbauverdichters deutlich erweitert, denn mit ihm können sowohl bindige Böden als auch nichtbindige Böden optimal verdichtet werden. Dabei sorgt die Tatsache, dass es sich um drei verschiedene diskrete Betriebsarten handelt dafür, dass komplexe Einstellungsarbeiten ebenso wenig erforderlich sind wie ein lediglich auf dem Gefühl des Benutzers basierendes und somit im Endeffekt eher ungenaues Einstellen. Statt dessen sind die drei diskreten Betriebsarten beispielsweise so ausgelegt, dass Resonanzen von eventuell im Arbeitsbereich des Anbauverdichters liegenden Bauwerken vermieden werden können, wie Gebäude, Brücken, Pfeiler und dergleichen, damit diese nicht beschädigt werden.
- Dabei geht die Erfindung aus von einer Unwuchterzeugung, wie sie üblicherweise bei Anbauverdichtern verwendet wird, insbesondere auch in Ausführungen, die an einen Bagger ankuppelbar sind. Dabei ist es günstig, wenn der Anbauverdichter von einem Hydrauliksystem angetrieben und gesteuert wird, vorzugsweise von dem des Baggers. Es wird die Tatsache genutzt, dass rotierende Massen, deren Schwerpunkte exzentrisch zu ihrer Drehachse liegen, eine Unwucht erzeugen. Diese lässt sich nach dem Satz von Steiner für einzelne oder mehrere rotierende Massen bestimmen. Dabei ist vorgesehen, dass die rotierenden Massen abhängig von einer Drehrichtung einer Antriebswelle unterschiedliche Endstellungen zueinander einnehmen. Dies wird erreicht, indem ein Teil der rotierenden Massen starr mit der Antriebswelle gekoppelt sind, ein anderer Teil dagegen in einem bestimmten Winkelbereich um die Antriebswelle schwenkbar ist, beispielsweise in einem Bereich von ungefähr 180 Grad.
- Bei einem Wechsel der Drehrichtung der Antriebswelle können die schwenkbaren rotierenden Massen dann infolge ihrer Trägheit jeweils eine von zwei möglichen Endstellungen relativ zu den starren rotierenden Massen annehmen. Dadurch wird eine Art "Mitnehmer-System" gebildet. Die starr auf der Antriebswelle angebrachten rotierenden Massen können mit der Antriebswelle formschlüssig oder kraftschlüssig verbunden sein, also beispielsweise über eine Verzahnung oder eine Aufschrumpfung.
- Dabei könnte der Unwuchterzeuger eine oder mehrere bezüglich der Antriebswelle starre rotierende Massen und eine oder mehrere um die Antriebswelle in einem Winkelbereich von bis zu ungefähr 180 Grad schwenkbare rotierende Massen enthalten, und diese könnten auf der Antriebswelle so angeordnet sein, dass Unwuchten nur in einer durch die Drehrichtung bestimmten Ebene auftreten. Dadurch wird eine Symmetrierung der Massen erreicht in Bezug auf die Drehbewegung der Antriebswelle und ein Torkeln des Unwuchterzeugers verhindert. Zugleich werden damit auch die Lager der Antriebswelle geschont. Mindestens benötigt ein solcher Unwuchterzeuger daher drei rotierende Massen, eine schwenkbare rotierende Masse etwa mittig auf der Antriebswelle und zwei starre rotierende Massen symmetrisch zu beiden Seiten. Der Unwuchterzeuger kann konstruktiv flexibel ausgelegt werden, wenn eine Verwendung auch von mehr als insgesamt drei rotierenden Massen berücksichtigt wird. Der Wechsel der Drehrichtung der Antriebswelle lässt sich einfach erreichen, wenn dazu beispielsweise vom Bagger die Fließrichtung des den Hydraulikmotor antreibenden Hydraulikstroms ("Volumenstrom") umgekehrt wird.
- Denkbar wäre auch eine Variation der Gesamtexzentrizität durch wahlweises Hinzu- oder Abschalten mindestens einer zusätzlichen Antriebswelle mit mindestens einer zusätzlichen exzentrischen Masse.
- Bevorzugt liegt die Schlagfrequenz in der zweiten Betriebsart zwischen der Schlagfrequenz in der ersten und in der dritten Betriebsart. Damit liegt die Schlagkraft in der zweiten Betriebsart zwar unterhalb jener der beiden anderen Betriebsarten, jedoch bei einer gegenüber der ersten Betriebsart etwas erhöhten Schlagfrequenz. Es wird somit sozusagen ein "Soft-Mode" mit geringer Schlagkraft und relativ niedriger Schlagfrequenz geschaffen, die zur besonders sicheren Vermeidung von Resonanzen jedoch gegenüber jener der ersten Betriebsart etwas erhöht ist.
- Ferner wird vorgeschlagen, dass die Schlagfrequenzen und Exzentrizitäten so aufeinander abgestimmt sind, dass die Schlagkraft des Anbauverdichters in der ersten Betriebsart wenigstens in etwa der Schlagkraft in der dritten Betriebsart entspricht, und vorzugsweise die Schlagkraft in der zweiten Betriebsart ungefähr 50 bis 60% hiervon beträgt. Dies gestattet eine Abdeckung von fast allen möglichen Einsatzszenarien.
- Dies gilt insbesondere dann, wenn die Schlagfrequenz in der ersten Betriebsart zwischen 30 und 40 Hz, vorzugsweise ungefähr bei 35 Hz, in der zweiten Betriebsart zwischen 40 und 50 Hz, vorzugsweise ungefähr bei 45 Hz, und in der dritten Betriebsart zwischen 55 und 65 Hz, vorzugsweise ungefähr bei 60 Hz liegt.
- Beispielsweise werden drei Betriebsarten X1, X2 und X3 definiert, die in erfindungsgemäßer Kombination aus Drehrichtung und Drehzahl Eigenschaften aufweisen, wie sie in der nachfolgenden Tabelle beispielhaft und als ungefähre Größenangabe beschrieben sind:
Betriebsart Exzentrizität der Massen Schlagfrequenz Schlagkraft X1 groß klein (ca. 35 Hz) groß (ca. 80-100 kN) X2 klein mittel (ca. 45Hz) mittel (ca. 40-60 kN) X3 klein groß (ca. 60 Hz) groß (ca. 80-100 kN) - In der Betriebsart X1 wird eine maximale Exzentrizität und somit eine maximale Unwucht eingestellt, und der den Hydraulikmotor antreibende Hydraulikstrom ist so eingestellt, dass sich dabei eine Schlagfrequenz von etwa 35 Hz ergibt. Dies führt zu einer Unwuchtamplitude bzw. Schlagkraft von etwa 80-100 kN, insbesondere von ungefähr 85 kN.
- In der Betriebsart X2 wird eine minimale Exzentrizität und somit eine minimale Unwucht eingestellt. Der den Hydraulikmotor antreibende Hydraulikstrom bleibt gegenüber dem X1-Betrieb in etwa unverändert, so dass sich als Folge der Entlastung durch die geringere Unwucht eine leicht erhöhte Schlagfrequenz von etwa 45 Hz ergibt. Im Ergebnis führt dies zu einer Unwuchtamplitude bzw. Schlagkraft von etwa 40-60 kN, insbesondere von ungefähr 45 kN.
- In der Betriebsart X3 ist die Exzentrizität bzw. Unwuht identisch zum X2-Betrieb. Der den Hydraulikmotor antreibende Hydraulikstrom wird jedoch im Vergleich zum X1- und X2-Betrieb auf einen erhöhten Wert eingestellt, so dass sich als Folge eine gleichfalls erhöhte Schlagfrequenz von etwa 60 Hz ergibt. Damit wiederum wird aufgrund der schnelleren Rotation trotz einer zu X2 gleichen Massenverteilung eine hohe Unwuchtamplitude bzw. Schlagkraft ähnlich dem X1-Betrieb von etwa 80-100 kN, insbesondere von ungefähr 85kN erreicht.
- Die drei Betriebsarten X1, X2 und X3 lassen sich dabei allein mittels einer Umstellung oder Umschaltung des Hydraulikstroms einstellen, wobei die Grundhydraulik des Baggers konstruktiv dieselbe ist. Damit wird ein übermäßiger baulicher Aufwand vermieden. Des weiteren kann die Betriebsart X1 eine Grundbetriebsart darstellen, von der aus jeweils in einen X2- oder X3-Betrieb umgeschaltet und bedarfsweise wieder zurückgeschaltet wird.
- Eine besonders vorteilhafte Ausgestaltung des erfindungsgemäßen Anbauverdichters sieht vor, dass er eine vorzugsweise optische Anzeigeeinrichtung umfasst, welche dem Baggerführer im Betrieb die aktuelle Betriebsart des Anbauverdichters anzeigt. Hierdurch wir die Handhabung stark vereinfacht.
- Die Anzeigeeinrichtung kann so ausgeführt sein, dass sie ein der jeweiligen Betriebsart zugeordnetes erstes Signal - beispielsweise ein Dauersignal - abgibt, wenn sich der Anbauverdichter wenigstens ungefähr in einer der mindestens drei diskreten Betriebsarten befindet, und ein der jeweiligen Betriebsart zugeordnetes zweites Signal - beispielsweise ein intermittierendes Signal - abgibt, wenn sich der Anbauverdichter leicht außerhalb der entsprechenden Betriebsart befindet.
- In Weiterbildung hierzu wird vorgeschlagen, dass die Anzeigeeinrichtung so ausgeführt ist, dass sie das erste Signal abgibt, wenn die aktuelle Schlagfrequenz ungefähr innerhalb von +/- 2,5 Hz einer Sollfrequenz der jeweiligen Betriebsart liegt, und das zweite Signal abgibt, wenn die aktuelle Schlagfrequenz von der Sollfrequenz um mehr als ungefähr +/- 2,5 Hz, jedoch weniger als ungefähr 5 Hz abweicht, und ein drittes oder gar kein Signal abgibt, wenn die aktuelle Schlagfrequenz um mehr als ungefähr 5 Hz von der Sollfrequenz abweicht.
- Besonders robust, preiswert und für den Benutzer, beispielsweise den Baggerführer, leicht verständlich ist es, wenn die Anzeigeeinrichtung drei Leuchteinrichtungen, insbesondere LEDs umfassend, aufweist, von denen jeweils eine einer der drei Betriebsarten zugeordnet ist.
- Die Konstruktion des Anbauverdichters ist einfach, wenn die Schlagfrequenz im Betrieb nur über den vom Bagger bereitgestellten Hydraulikstrom veränderbar ist. Auf ein im oder am Anbauverdichter vorhandenes Hydraulikventil kann dann verzichtet werden.
- Alternativ könnte der Anbauverdichter ein Schaltmittel zur Veränderung der Drehzahl der Antriebswelle enthalten, welches ein hydraulisches Schaltventil aufweist, und welches in einer ersten Stellung einen zusätzlichen Volumenstrom freigibt und in einer zweiten Stellung den zusätzlichen Volumenstrom sperrt. Damit kann durch ein Zuschalten eines parallelen Pfades der Volumenstrom zum Antrieb des Hydromotors erhöht und dessen Drehzahl gesteigert werden, woraus sich eine entsprechende Erhöhung der Schlagfrequenz ergibt. Diese Variante ist ohne große konstruktive Veränderungen auch bei bestehenden Ausführungen von Anbauverdichtern realisierbar und somit vergleichsweise kostengünstig. Ggf. ist diese Variante sogar bei bestehenden Anbauverdichtern nachrüstbar.
- Eine Abwandlung dazu sieht vor, dass das Schaltmittel ein hydraulisches Schaltventil aufweist, welches in einer ersten Stellung einen ersten Volumenstrom und in einer zweiten Stellung einen zweiten Volumenstrom freigibt. Daraus ergibt sich eine konstruktive Vereinfachung der Hydraulik des Anbauverdichters, indem eine Veränderung des Volumenstroms über ein einziges Element geschehen kann, und ein zuschaltbarer paralleler Pfad nicht erforderlich ist.
- Besonders nützlich ist es, wenn das Schaltmittel durch einen hydraulischen Schaltimpuls oder elektrohydraulisch oder manuell betätigbar ist. Dadurch kann der Hydraulikstrom auf eine an eine Bauart des Unwuchterzeugers oder des Baggers angepasste Weise umgestellt oder umgeschaltet werden. Insbesondere ist die Umschaltung durch einen kurzen hydraulischen Impuls ("Kugelschreiberprinzip") vorteilhaft, wenn eine manuelle Umstellung nicht in Frage kommt und eine elektrische oder zusätzliche hydraulische Verbindung zwischen dem Anbauverdichter und dem ihn betreibenden Bagger nicht vorgesehen ist.
- Eine weitere wichtige Ausgestaltung der Erfindung besteht darin, dass die Masse relativ zur Antriebswelle und um eine zur Antriebswelle parallele oder koaxiale Achse von einer ersten in eine zweite Stellung und zurück verschwenkbar ist und mindestens eine Anschlagfläche aufweist, die mit einem relativ zur Antriebswelle starren jedoch in sich gummielastischen Anschlagpuffer zusammenarbeitet, wobei die Anschlagfläche um eine zur Antriebswelle parallele Achse schwenkbar gelagert ist. Dem liegt folgende Überlegung zugrunde: Sinnvoll ist es, die erste und die zweite Stellung so zu wählen, dass zwei sehr unterschiedliche Exzentrizitäten entstehen. Dabei wird die erforderliche Begrenzung mit Hilfe einer zweiseitig wirkenden Anschlagvorrichtung, bestehend aus einem drehbar gelagerten Anschlagbolzen und zum Beispiel vier Anschlagpuffern verwirklicht. Die bei einem Wechsel der Drehrichtung der Antriebswelle auftretende Winkelbeschleunigung führt zusammen mit dem Trägheitsmoment der schwenkbaren rotierenden Masse zu hohen Kräften beim Erreichen der Endstellungen. Die Anschlagpuffer nehmen diese Kräfte auf und absorbieren zumindest einen Teil der Bewegungsenergie.
- Beispielsweise sind die Anschlagpuffer als progressiv arbeitende Strukturdämpfer aus einem Material ausgeführt, das ganz oder teilweise aus Co-Polyester-Elastomeren besteht und auf einer Metallfläche der starren rotierenden Massen aufvulkanisiert ist. Es kann vorteilhaft sein, die Anschlagpuffer als (dichte) Hohlkörper zu gestalten, so dass die darin enthaltene Luft an der Energieaufnahme beteiligt ist. Vorzugsweise besitzt der Anschlagbolzen (spiegelbildlich an seinen Enden) insgesamt vier Anschlagflächen, nämlich zwei für jede der beiden Endstellungen der schwenkbaren rotierenden Masse. Damit wird eine - bezogen auf eine zylindrische Grundform des Anschlagbolzens - größtmögliche Fläche für die den Anschlag bestimmende Zone ermöglicht. Je größer die den Anschlag bestimmende Fläche ist, um so niedriger bleiben die bei einem Anschlag auftretenden Druckspannungen in den Anschlagpuffern.
- Die Verdrehbarkeit des Anschlagbolzens führt dazu, dass sich dieser beim Auftreffen auf die Anschlagpuffer von selbst automatisch so justiert, dass die Anschlagflächen des Anschlagbolzens die Oberflächen der Anschlagpuffer wenigstens in etwa planparallel berühren. Der Anschlagbolzen kann sich also während der Verformungsphase der Anschlagpuffer drehen und so eine flächige Berührung der Anschlagflächen auf die Anschlagpuffer aufrecht erhalten. Dabei hilft es, wenn der Anschlagbolzen nur in einem beschränkten Winkelbereich um seine Achse drehbar ist, beispielsweise in einem Winkelbereich von +/-12 Grad. Außerdem verhindert die Beschränkung des Winkelbereichs, dass der Anschlagbolzen in einer ihn aufnehmenden Bohrung infolge Vibrationen unkontrolliert zu drehen beginnt.
- Vorgeschlagen wird ferner, dass die bewegliche Masse eine Vielzahl von Teilmassen umfasst, die in einem Aufnahmeraum aufgenommen sind, dessen Volumen größer ist als das Gesamtvolumen der Teilmassen, und der mindestens eine Begrenzungswand aufweist, welche die Teilmassen in der ersten Drehrichtung in eine erste Position und in der zweiten Drehrichtung in eine zweite Position zwingt, wobei der Gesamtschwerpunkt der Teilmassen in der ersten Position insgesamt einen anderen Abstand zur Drehachse aufweist als in der zweiten Position. Ein solcher Unwuchterzeuger arbeitet sehr verschleißarm und hat daher eine große Lebensdauer.
- Nachfolgend werden beispielhafte Ausführungsformen der Erfindung unter Bezugnahme auf die Zeichnung erläutert. In der Zeichnung zeigen:
- Figur 1
- eine schematische Seitansicht eines Anbauverdichters;
- Figur 2
- eine perspektivische Ansicht eines Unwuchterzeugers des Anbauverdichters von
Figur 1 in einer ersten Betriebsart; - Figur 3
- eine perspektivische Ansicht des Unwuchterzeugers von
Figur 2 in einer zweiten Betriebsart; - Figur 4
- einen Querschnitt durch einen Bereich des Unwuchterzeugers von
Figur 2 längs der Linie IV- IV vonFigur 3 ; - Figur 5
- ein Schaltplan einer ersten Ausführungsform einer Hydraulikschaltung des Anbauverdichters von
Figur 1 für eine erste Betriebsart; - Figur 6
- eine Darstellung ähnlich zu
Figur 5 für eine zweite Betriebsart; - Figur 7
- eine Darstellung ähnlich zu
Figur 5 für eine dritte Betriebsart; - Figur 8
- ein Schaltplan einer zweiten Ausführungsform einer Hydraulikschaltung des Anbauverdichters von
Figur 1 ; - Figur 9
- einen Schnitt durch eine alternative Ausführungsform eines Unwuchterzeugers des Anbauverdichters von
Figur 1 ; - Figur 10
- eine Ansicht von vorne des Anbauverdichters von
Figur 1 ; und - Figur 11
- ein Diagramm zur Erläuterung einer Einstellung einer Betriebsart des Anbauverdichters der
Figur 1 .. - In allen Figuren werden für funktionsäquivalente Teile oder Größen die jeweils gleichen Bezugszeichen verwendet.
- In der
Figur 1 ist ein Anbauverdichter 10 dargestellt, der einen Unwuchterzeuger 12 umfasst. Der Unwuchterzeuger 12 ist mit einem Hydraulikmotor 13 verbunden, der wiederum mit dem Hydrauliksystem eines nicht dargestellten Baggers verbunden ist. Durch den Unwuchterzeuger 12 wird im Betrieb eine Verdichterplatte 14 in Schwingung versetzt. Die Verdichterplatte 14 ist über Verbindungselemente 15 und Puffereinrichtungen 16, insbesondere Metallgummipuffer, mit einem Oberteil 17 des Anbauverdichters 10 elastisch verbunden. Der Anbauverdichter 10 ist über eine Aufnahme 18 an einem Baggerarm 19 befestigbar. Die Aufnahme 18 kann als Schnellwechselsystem ausgebildet sein. Dadurch kann auf einfache Art und Weise eine mechanische und hydraulische Verbindung zum Bagger hergestellt werden. Unterhalb der Aufnahme 18 schließt sich ein Drehmotor 20 an, über den der Anbauverdichter 10 bezüglich des Baggerarms 19 verdreht werden kann. Der Hydraulikmotor 13 ist bei der gezeigten Ausführungsform unter Zwischenschaltung eines Ventilblocks 60 über Hydraulikleitungen 21 und die Aufnahme 18 mit dem Hydrauliksystem des Baggers verbunden. Über den Ventilblock 60 kann der Volumenstrom, der vom Bagger zum Hydraulikmotor 13 gelangt, auf verschiedene Weise eingestellt werden kann, wie weiter unten unter Bezugnahme auf dieFiguren 5 bis 8 erläutert werden wird. Die Flussrichtung des Hydraulikstroms zum Hydraulikmotor 13 ist baggerseitig umkehrbar. Alternativ oder zusätzlich kann der Volumenstrom aber auch vom Bagger eingestellt werden, beispielsweise indem der Baggerführer ein entsprechendes Steuerelement (Gaspedal, Steuerknüppel) entsprechend betätigt. Hierauf wird am Ende dieser Beschreibung noch stärker im Detail eingegangen werden. -
Figur 2 zeigt eine Ansicht einer ersten Ausführungsform des Unwuchterzeugers 12 in einer ersten Betriebsart mit kleiner Unwuchtamplitude: An eine Antriebswelle 30 sind zwei starre rotierende und gegenüber einer Mittelachse der Antriebswelle 30 exzentrisch angeordnete Massen 32a und 32b starr angekoppelt. Auf radialen Absätzen (ohne Bezugszeichen) der starren rotierenden Massen 32a und 32b sind insgesamt vier hohle Anschlagpuffer 34 angeordnet, beispielsweise durch eine Aufvulkanisierung, von denen in der perspektivischen Darstellung derFiguren 2 und3 nur zwei sichtbar sind, und deren Funktion weiter unten stärker im Detail erläutert werden wird. - Zwischen den gegenüber der Antriebswelle 30 starren rotierenden Massen 32a und 32b befindet sich eine gegenüber der Antriebswelle 30 schwenkbare rotierende Masse 36. Die Schwenkachse der Masse 36 ist koaxial zur Antriebswelle 30. Mittels Verschwenken kann die Masse 36 relativ zur Antriebswelle 30 und den beiden zur Antriebswelle 30 starren Massen 32a und 32b in eine von zwei Endstellungen gebracht werden. In
Figur 2 befindet sich die schwenkbare rotierende Masse 36 bezüglich der Antriebswelle 30 den starren rotierenden Massen 32a und 32b gegenüber, so dass sich in der Summe aller drei Massen 32a, 32b, 36 eine relativ kleine Unwucht ergibt. -
Figur 3 zeigt den Unwuchterzeuger 12 mit der schwenkbaren rotierenden Masse 36 in der anderen der beiden möglichen Endstellungen: Die Masse 36 ist in der Achsenrichtung der Antriebswelle 30 gesehen größtenteils in derselben Flucht mit den starren rotierenden Massen 32a und 32b angeordnet, also von der Antriebswelle 30 aus gesehen auf der gleichen Seite wie die starren rotierenden Massen 32a und 32b, so dass sich in der Summe aller drei Massen 32a, 32b, 36 eine relativ große Unwucht ergibt. - In einer Aufnahmebohrung 38 der schwenkbaren rotierenden Masse 36 ist ein mit den Anschlagpuffern 34 an den starren rotierenden Massen 32a und 32b in noch darzustellender Weise zusammenwirkender drehbarer Anschlagbolzen 40 untergebracht, der mit seinen abragenden Enden beidseitig über die Aufnahmebohrung 38 übersteht. Jedes abragende Ende weist zwei entgegengesetzt angeordnete planparallele Anschlagflächen 42 auf. In
Figur 3 sind zwei ausgeformte Bohrungen 44 in der schwenkbaren rotierenden Masse 36 sichtbar, welche in ihrem Querschnitt eine langlochähnliche Form besitzen. Darin sind zwei zylindrische Stifte 46 aufgenommen, die an ihrem nicht sichtbaren Ende fest im Anschlagbolzen 40 verankert sind. Auf diese Weise ist der Anschlagbolzen 40 in der Aufnahmebohrung 38 entsprechend der Geometrie der ausgeformten Bohrungen 44 um einen kleinen Bereich drehbar. - Wie aus
Figur 2 ersichtlich ist, ruht der Anschlagbolzen 40 mittels der Anschlagflächen 42 in der inFigur 2 gezeigten Endstellung der schwenkbaren rotierenden Masse 36 auf den in denFiguren 2 und3 hinteren Anschlagpuffern 34. Wie ausFigur 3 ersichtlich ist, ruht der Anschlagbolzen 40 mittels der Anschlagflächen 42 in der inFigur 3 gezeigten Endstellung der schwenkbaren rotierenden Masse 36 auf den in denFiguren 2 und3 vorderen Anschlagpuffern 34. Dabei wird durch die Verdrehbarkeit des Anschlagbolzens 40 für eine zu jedem Zeitpunkt parallele und damit großflächige Berührung zwischen den Anschlagflächen 42 und den Anschlagpuffern 34 gesorgt. -
Figur 4 zeigt einen Querschnitt durch jenen Bereich der schwenkbaren rotierenden Masse 36, in dem die Bohrungen 44 vorhanden sind, wobei die Schnittebene orthogonal zur Längsachse der Antriebswelle 30 ist und durch die inFigur 3 dargestellt Linie IV-IV geht. Im Anschlagbolzen 40 sind die Stifte 46 fest verankert, beispielsweise eingepresst oder eingeschraubt. Bei einer Verdrehung des Anschlagbolzens 40 in der Aufnahmebohrung 38 werden die Stifte 46 in der ausgeformten Bohrung 44, begrenzt durch die Größe der Spalte 48, verschwenkt. Damit ist der Anschlagbolzen 40 über einen Winkelbereich 50 in Bezug auf eine durch seine Mittelachse 52 gehende Referenzlinie 54 begrenzt drehbar. -
Figur 5 zeigt ein Schema der Hydraulikschaltung des Ventilblocks 60 zum Betreiben des Unwuchterzeugers 12 in einer ersten Betriebsart. Ausgehend von Hydraulikanschlüssen P, R und L an einer hydraulischen Schnellkupplung 62 an der Aufnahme 18 (im unteren Teil vonFigur 5 ) fließt ein druckbeaufschlagter Vorlaufstrom 64 durch verschiedene Elemente hin zum Hydraulikmotor 13. Die weißen Dreiecksymbole 64 kennzeichnen den druckbeaufschlagten Hauptflussweg. Der Hydraulikstrom fließt dabei über ein druckgesteuertes Rückschlagventil 76 und ein einstellbares Stromregelventil 78 hin zum Hydraulikmotor 13. Das Stromregelventil 78 hat die Aufgabe, den Hydraulikstrom druckunabhängig gleich zu halten. Parallel zum Stromregelventil 78 liegt ein Rückschlagventil 80, welches zum Hydraulikmotor 13 hin sperrt. - Ausgehend vom Hydraulikmotor 13 (im oberen Teil der Figur) fließt ein durch schwarze Dreiecksymbole gekennzeichneter Rücklaufstrom 74 durch verschiedene Elemente zurück zur Schnellkupplung 62. Der Hydraulikstrom fließt dabei über ein normales Rückschlagventil 66 und ein druckgesteuertes Rückschlagventil 68 zurück zur Schnellkupplung 62. Parallel zum Rückschlagventil 66 liegen in Nebenpfaden je ein Stromregelventil 70 und 72, Letzteres in Reihe mit einem Schaltventil 88. Das Schaltventil 88 kann dabei entweder manuell oder durch eine elektrische Fernwirkung (elektrohydraulisches Ventil) betätigbar sein. Die Elemente 66, 70, 72 und 88 bilden insgesamt ein hydraulisches Schaltmittel 87.
- Parallel zum Hydraulikmotor 13 sind gegenläufig zwei Druckbegrenzungsventile 82 und 84 angeordnet, beispielsweise zum Ausgleich transienter Betriebszustände, um etwa einen Druckausgleich und ein gesteuertes Abbremsen im Nachlauf nach einem Abschalten der Hydropumpe des Baggers zu ermöglichen. Eine Leckageleitung 86 verbindet den Hydraulikmotor 13 direkt mit der Schnellkupplung 62 zur Rückführung eventueller Leckageströme.
- In
Figur 5 ist die Hydraulikschaltung 60 in einem sogenannten "X1"-Betrieb dargestellt. In diesem liegen am P-Anschluss der Schnellkupplung 62 ein hoher Versorgungsdruck und am R-Anschluss ein Rücklaufdruck an. Das Schaltventil 88 ist geschlossen. Hydraulikfluid strömt über das Rückschlagventil 76 und das Stromregelventil 78 zum Hydraulikmotor 13 und von dort über das Rückschlagventil 66 und das Rückschlagventil 68 zurück. Der Druck des Hydraulikstroms an der Stelle 68a steuert das Rückschlagventil 68 auf. Ohne die Verwendung des Rückschlagventils 68 bestünde die Gefahr des Kavitierens des Hydraulikmotors 13 beim Ausschalten. In dieser X1-Betriebsart dreht der Unwuchterzeuger 12 in einer ersten Drehrichtung, in der die schwenkbare rotierende Masse 36 in der inFigur 3 gezeigten Stellung (große Unwucht) ist und eine Drehzahl von beispielsweise ungefähr 35 1/sec erreicht wird. Es ergibt sich eine Schlagkraft von beispielsweise ca. 90 kN. -
Figur 6 zeigt die Hydraulikschaltung 60 bei einer gegenüberFigur 5 umgekehrten Fließrichtung des Hydraulikstroms, was als "X2"-Betrieb bezeichnet wird. Ausgehend von dem nun druckbeaufschlagten Anschluss R der Schnellkupplung 62 fließt der Vorlaufstrom 64 nun über das Rückschlagventil 68 und das Stromregelventil 70 hin zum Hydraulikmotor 13. Das Stromregelventil 70 hat wiederum die Aufgabe, den Hydraulikstrom druckunabhängig gleich zu halten. Ausgehend vom Hydraulikmotor 13 fließt der Rücklaufstrom 74 über das Rückschlagventil 80 und das Rückschlagventil 76 zurück zum nun drucklosen Rücklaufanschluss P an der Schnellkupplung 62. In dieser X2-Betriebsart dreht der Unwuchterzeuger 12 in einer zweiten Drehrichtung, in der die schwenkbare rotierende Masse 36 in der inFigur 2 gezeigten Stellung (kleine Unwucht) ist und eine Drehzahl von beispielsweise ungefähr 45 1/sec erreicht wird. Es ergibt sich eine Schlagkraft von beispielsweise ca. 50 kN. -
Figur 7 zeigt die Hydraulikschaltung 60 in einer dritten Betriebsart, die als "X3-Betriebsart" bezeichnet wird. Die Fließrichtung des Hydraulikfluids und somit die Drehrichtung des Unwuchterzeugers 12 entsprechenFigur 6 . In diesem "X3"-Betrieb ist jedoch das Schaltventil 88 geöffnet und erhöht, ergänzend zum Strom über das Stromregelventil 70, die Durchflussmenge. Beispielsweise steht der Volumenstrom durch das Schaltventil 88 zum Volumenstrom durch das Stromregelventil 70 in einem Verhältnis von 1:2. In dieser X3-Betriebsart wird eine Drehzahl von beispielsweise ungefähr 60 1/sec erreicht, bei einer Schlagkraft von beispielsweise ca. 90 kN. -
Figur 8 zeigt ein Schema einer abgewandelten Ausführungsform einer Hydraulikschaltung des Ventilblocks 60 zum Betreiben und Steuern des Unwuchterzeugers 12, bei der, abweichend von den Darstellungen derFiguren 5 bis 7 , an Stelle des Schaltventils 88 ein Impulsventil 90 in den Hydraulikstrom eingefügt ist. Das Impulsventil kann mittels eines kurzen hydraulischen Impulses ("Kugelschreiberprinzip") geöffnet oder geschlossen werden. Dazu wird ein hydraulischer Steuerstrom 92 benutzt, der an einer geeigneten Stelle an dem druckbeaufschlagten Zweig stromabwärts vom P-Anschluss abgegriffen ist. Bedarfsweise können die Druckbegrenzungsventile 82 und 84 für einen Betrieb mit einem Impulsventil 90 auf andere Schwellwerte eingestellt werden als für einen Betrieb mit einem Schaltventil 88. Beispielsweise sind die Schwellwerte um einen Faktor 1,75 erhöht. - Eine alternative Ausführungsform eines Unwuchterzeugers 12 ist in
Figur 9 gezeigt. Dabei gilt, dass solche Elemente und Bereiche, die funktionsäquivalent zu in vorhergehenden Figuren beschriebenen Elementen und Bereichen sind, die gleichen Bezugszeichen tragen und nicht nochmals im Detail erläutert sind. - Der Unwuchterzeuger 12 umfasst ein zylindrisches bzw. trommelförmiges geschlossenes Gehäuse 94, welches exzentrisch um eine Antriebswelle 30 angeordnet ist. Im Inneren des Gehäuses 94 ist ein Aufnahmeraum 96 gebildet, der unter anderem durch eine hohle Begrenzungswand 98 begrenzt wird, die sich in etwa von der geometrischen Mitte des Gehäuses 94 nach radial auswärts erstreckt. In dem Aufnahmeraum 96 ist eine bestimmte Anzahl von Kugeln 100 vorhanden, die auch als "Teilmassen" bezeichnet werden und so eine amorphe bewegliche Gesamtmasse 36 bilden. Dreht das Gehäuse 94 um die Antriebswelle 30 im Uhrzeigersinn, werden die Kugeln 100 in die in
Figur 9 gezeigte Position gezwängt, in der sie einen relativ geringen Abstand zur Antriebswelle 30 haben. Die Exzentrizität ist somit vergleichsweise klein. Dreht das Gehäuse 94 dagegen entgegen dem Uhrzeigersinn, werden die Kugeln 100 in die entgegengesetzte Position gezwängt, in der sie einen relativ großen Abstand zur Antriebswelle 30 aufweisen. Die Exzentrizität ist somit vergleichsweise groß. - Aus
Figur 10 ist ersichtlich, dass der Anbauverdichter 10 an einer Stirnseite 102 des Oberteils 17 eine optische Anzeigeeinrichtung in Form von drei Leuchteinrichtungen 104a, 104b und 104c aufweist, welche jeweils durch ein Array mehrerer LEDs gebildet sind. In der Betriebsart X1, also bei relativ großer Exzentrizität und einer Frequenz von ungefähr 35Hz, leuchtet die Leuchteinrichtung 104a dauernd. In der Betriebsart X2, also bei relativ kleiner Exzentrizität und einer Frequenz von ungefähr 45Hz, leuchtet die Leuchteinrichtung 104b dauernd. In der Betriebsart X3, also bei relativ kleiner Exzentrizität und einer Frequenz von ungefähr 60Hz, leuchtet die Leuchteinrichtung 104c dauernd. - Dies ist insbesondere dann vorteilhaft, wenn der Hydraulikstrom ausschließlich vom Bagger aus eingestellt wird, beispielsweise, indem der Baggerführer ein entsprechendes (nicht gezeigtes) Steuerelement (Gashebel oder Gaspedal o.ä.) betätigt. Der Baggerführer wird durch die Anzeige der Leuchteinrichtungen 104a-c instruiert, wie er das Steuerelement zu betätigen hat, um die Schlagfrequenz einer bestimmten Betriebsart einzustellen.
- Daneben stellt der Baggerführer durch die Richtung des Hydraulikkreislaufs auch die Exzentrizität ein.
- Das entsprechende Verfahren wird nun unter Bezugnahme auf das Diagramm der
Figur 11 beispielhaft für eine Betriebsart erläutert. In diesem Diagramm ist eine Schlagfrequenz f über der Zeit t aufgetragen. Mit fs ist eine Soll-Schlagfrequenz bezeichnet, wobei es sich hierbei um die Soll-Schlagfrequenz für die Betriebsart X1, X2 oder X3 handeln kann. Mit fa ist eine aktuelle Schlagfrequenz bezeichnet. Um die Soll-Schlagfrequenz fs ist ein erstes Toleranzband 106 gelegt, dessen Grenzen in einem Abstand von df1 von der Soll-Schlagfrequenz fs liegen, und ein zweites Toleranzband 108 gelegt, dessen Grenzen in einem Abstand von df2 von der Soll-Schlagfrequenz fs liegen, wobei df2 größer ist als df1. df1 beträgt vorliegend beispielsweise 2,5 Hz, df2 beispielsweise ungefähr 5 Hz. Liegt die aktuelle Schlagfrequenz fa innerhalb des ersten Toleranzbandes 106, leuchtet die entsprechende Leuchteinrichtung 104a, b oder c dauerhaft. Liegt die aktuelle Schlagfrequenz fa außerhalb des ersten Toleranzbandes 106, jedoch noch innerhalb des zweiten Toleranzbandes 108, leuchtet die entsprechende Leuchteinrichtung 104a, b oder c intermittierend. Liegt die aktuelle Schlagfrequenz fa auch außerhalb des zweiten Toleranzbandes 108, leuchtet die entsprechende Leuchteinrichtung 104a, b oder c überhaupt nicht. - Hierzu ist die Anzeigeeinrichtung 104 mit einer nicht gezeigten Stromversorgung gekoppelt, die beispielsweise einen in den Anbauverdichter 10 integrierten Generator umfasst, der entweder mit der Antriebswelle 30 des Unwuchterzeugers 12 oder mit einem separaten Hydraulikmotor gekoppelt ist. Angesteuert wird die Anzeigeeinrichtung 104 durch eine ebenfalls nicht gezeigte elektronische Signalerfassungs- und -verarbeitungseinheit. Diese erfasst beispielsweise die aktuelle Drehzahl der Antriebswelle 30 über einen entsprechenden Sensor und - beispielsweise über die Drehrichtung der Antriebswelle 30 - auch die aktuelle Exzentrizität.
- Selbstverständlich sind auch andere Ausführungen der Anzeigeeinrichtung denkbar, beispielsweise eine LCD-Anzeige, eine farbige Darstellung, eine Kommandoanzeige, oder eine Übertragung beispielsweise per Bluetooth an eine Anzeigeeinrichtung im Führerstand des Baggers. Auf diese Weise ist sogar die Einrichtung einer geschlossenen Regelstrecke denkbar. Es versteht sich außerdem, dass die oben beschriebene Anzeigeeinrichtung 104 sowohl bei einem Unwuchterzeuger 12 mit verschwenkbaren Massen entsprechend der
Figuren 2 bis 4 als auch bei einem Unwuchterzeuger 12 mit einer Vielzahl von Einzelmassen entsprechend derFigur 9 eingesetzt werden kann.
Claims (15)
- Anbauverdichter (10), der an einen Bagger ankuppelbar ist, bei dem eine Schlagwirkung durch mindestens eine rotierende und relativ zu mindestens einer Antriebswelle (30) exzentrisch angeordnete Masse (32, 36) erzeugt wird, wobei sowohl die Exzentrizität als auch die Schlagfrequenz der rotierenden Masse (32, 36) im Betrieb gezielt veränderbar sind, dadurch gekennzeichnet, dass mindestens drei diskrete Betriebsarten (X1, X2, X3) einstellbar sind, wobei in der ersten Betriebsart (X1) die Exzentrizität größer als in der zweiten (X2) und dritten Betriebsart (X3) und die Schlagfrequenz kleiner als in der dritten Betriebsart (X3) ist, und wobei in der zweiten (X2) und dritten Betriebsart (X3) die Exzentrizitäten gleich sind, die Schlagfrequenz in der zweiten Betriebsart (X2) aber kleiner ist als in der dritten Betriebsart (X3).
- Anbauverdichter (10) nach Anspruch 1, dadurch gekennzeichnet, dass die Schlagfrequenz in der zweiten Betriebsart (X2) zwischen der Schlagfrequenz in der ersten (X1) und in der dritten Betriebsart (X3) liegt.
- Anbauverdichter (10) nach Anspruch 2, dadurch gekennzeichnet, dass die Schlagfrequenzen und Exzentrizitäten so aufeinander abgestimmt sind, dass die Schlagkraft des Anbauverdichters (10) in der ersten Betriebsart (X1) wenigstens in etwa der Schlagkraft in der dritten Betriebsart (X3) entspricht, und vorzugsweise die Schlagkraft in der zweiten Betriebsart (X2) ungefähr 50 bis 60% hiervon beträgt.
- Anbauverdichter (10) nach einem der Ansprüche 2 oder 3, dadurch gekennzeichnet, dass die Schlagfrequenz in der ersten Betriebsart (X1) zwischen 30 und 40 Hz, vorzugsweise ungefähr bei 35 Hz, in der zweiten Betriebsart (X2) zwischen 40 und 50 Hz, vorzugsweise ungefähr bei 45 Hz, und in der dritten Betriebsart (X3) zwischen 55 und 65 Hz, vorzugsweise ungefähr bei 60 Hz liegt.
- Anbauverdichter (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass er eine vorzugsweise optische Anzeigeeinrichtung (104) umfasst, welche dem Baggerführer im Betrieb die aktuelle Betriebsart (X1, X2, X3) des Anbauverdichters (10) anzeigt.
- Anbauverdichter (10) nach Anspruch 5, dadurch gekennzeichnet, dass die Anzeigeeinrichtung (104) so ausgeführt ist, dass sie ein der jeweiligen Betriebsart zugeordnetes erstes Signal abgibt, wenn sich der Anbauverdichter (10) wenigstens ungefähr in einer der mindestens drei diskreten Betriebsarten (X1, X2, X3) befindet, und ein der jeweiligen Betriebsart zugeordnetes zweites Signal abgibt, wenn sich der Anbauverdichter leicht außerhalb der entsprechenden Betriebsart (X1, X2, X3) befindet.
- Anbauverdichter (10) nach Anspruch 6, dadurch gekennzeichnet, dass die Anzeigeeinrichtung (104) so ausgeführt ist, dass sie das erste Signal abgibt, wenn eine aktuelle Schlagfrequenz (fa) ungefähr innerhalb von +/- 2,5 Hz einer Sollfrequenz (fs) der jeweiligen Betriebsart liegt, und das zweite Signal abgibt, wenn die aktuelle Schlagfrequenz (fa) von der Sollfrequenz (fs) um mehr als ungefähr +/- 2,5 Hz, jedoch weniger als ungefähr 5 Hz abweicht, und ein drittes oder gar kein Signal abgibt, wenn die aktuelle Schlagfrequenz (fa) um mehr als ungefähr 5 Hz von der Sollfrequenz (fs) abweicht.
- Anbauverdichter (10) nach einem der Ansprüche 5 bis 7, dadurch gekennzeichnet, dass die Anzeigeeinrichtung drei Leuchteinrichtungen (104a; 104b, 104c), insbesondere LEDs umfassend, aufweist, von denen jeweils eine einer der drei Betriebsarten (X1, X2, X3) zugeordnet ist.
- Anbauverdichter (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Schlagfrequenz im Betrieb nur über den vom Bagger bereitgestellten Hydraulikstrom veränderbar ist.
- Anbauverdichter (10) nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet, dass er zur Veränderung der Schlagfrequenz ein das Schaltmittel (87) in Form eines hydraulischen Schaltventils (88; 90) umfasst, welches in einer ersten Stellung einen zusätzlichen Volumenstrom freigibt und in einer zweiten Stellung den zusätzlichen Volumenstrom sperrt.
- Anbauverdichter (10) nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet, dass er zur Veränderung der Schlagfrequenz ein Schaltmittel (87) in Form eines hydraulischen Schaltventils (88, 90) aufweist, welches in einer ersten Stellung einen ersten Volumenstrom und in einer zweiten Stellung einen zweiten Volumenstrom freigibt.
- Anbauverdichter (10) nach einem der Ansprüche 10 oder 11, dadurch gekennzeichnet, dass das Schaltmittel (87) durch einen hydraulischen Schaltimpuls oder elektrohydraulisch oder manuell betätigbar ist.
- BetriebsartenBetriebsartBetriebsartBetriebsartBetriebs artBetriebsartBetriebsartBetriebsartBetriebsartAnbauve rdichter (10) nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die Masse (36) relativ zur Antriebswelle (30) und um eine zur Antriebswelle (30) parallele Achse von einer ersten in eine zweite Stellung und zurück verschwenkbar ist und mindestens eine Anschlagfläche (42) aufweist, die mit einem relativ zur Antriebswelle (30) starren jedoch in sich gummielastischen Anschlagpuffer (34) zusammenarbeitet, wobei die Anschlagfläche (42) um eine zur Antriebswelle (30) parallele Achse schwenkbar gelagert ist, wobei die Anschlagfläche (42) vorzugsweise nur in einem beschränkten Winkelbereich (50) verschwenkbar ist.
- Anbauverdichter (12) nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet, dass die bewegliche Masse (36) eine Vielzahl von Teilmassen (100) umfasst, die in einem Aufnahmeraum (96) aufgenommen sind, dessen Volumen größer ist als das Gesamtvolumen der Teilmassen (100), und der mindestens eine Begrenzungswand (98) aufweist, welche die Teilmassen (100) in der ersten Drehrichtung in eine erste Position und in der zweiten Drehrichtung in eine zweite Position zwingt, wobei der Gesamtschwerpunkt der Teilmassen (100) in der ersten Position insgesamt einen anderen Abstand zur Antriebswelle (30) aufweist als in der zweiten Position.
- Verfahren zum Betreiben eines Anbauverdichters (10), der an einen Bagger ankuppelbar ist, bei dem eine Schlagwirkung durch mindestens eine rotierenden und relativ zu einer Antriebswelle (30) exzentrisch angeordnete Masse (32, 36) erzeugt wird, wobei sowohl die Exzentrizität als auch die Schlagfrequenz abhängig von einer Einsatzanforderung im Betrieb verändert werden, dadurch gekennzeichnet, dass in einer ersten Betriebsart (X1) die Exzentrizität größer als in einer zweiten und dritten Betriebsart (X2, X3) und die Schlagfrequenz kleiner als in der dritten Betriebsart (X3) sind, und dass in der zweiten und dritten Betriebsart (X2, X3) die Exzentrizitäten gleich sind, die Schlagfrequenz in der zweiten Betriebsart (X2) aber kleiner ist als in der dritten Betriebsart (X3).
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE202009005813 | 2009-04-18 | ||
| DE102009018490.2A DE102009018490B4 (de) | 2009-04-18 | 2009-04-22 | Anbauverdichter, der an einen Bagger ankuppelbar ist, mit einem Unwuchterzeuger |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP2243881A2 true EP2243881A2 (de) | 2010-10-27 |
| EP2243881A3 EP2243881A3 (de) | 2013-01-02 |
| EP2243881B1 EP2243881B1 (de) | 2016-10-26 |
Family
ID=42314845
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP10160020.3A Active EP2243881B1 (de) | 2009-04-18 | 2010-04-15 | Anbauverdichter, der an einen Bagger ankuppelbar ist, sowie Verfahren zu seinem Betrieb |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP2243881B1 (de) |
| DE (1) | DE102009018490B4 (de) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITTO20120163A1 (it) * | 2012-02-24 | 2013-08-25 | Cangini Benne Srl | Macchina operatrice provvista di un dispositivo di basculamento per un'attrezzatura |
| WO2014108389A3 (de) * | 2013-01-10 | 2014-09-04 | Mts Maschinentechnik Schrode Ag | Verfahren zum betreiben eines anbauverdichters, sowie speichermedium und anbauverdichter |
| WO2017192083A1 (en) * | 2016-04-29 | 2017-11-09 | Construction Tools Pc Ab | Rig mounted compactor |
| DE102016009086A1 (de) * | 2016-07-26 | 2018-02-01 | Bomag Gmbh | Handgeführte Bodenverdichtungsmaschine, insbesondere Vibrationsstampfer oder Vibrationsplatte |
| EP3578273A1 (de) * | 2018-06-05 | 2019-12-11 | MTS Maschinentechnik Schrode AG | Anbauverdichter |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011086085A1 (de) | 2011-11-10 | 2013-05-16 | MTS Gesellschaft für Maschinentechnik und Sonderbauten mbH | Anbaugerät für einen Bagger |
| CN102852178B (zh) * | 2012-09-28 | 2014-11-05 | 张桂添 | 一种新型振击锤 |
| SE537044C2 (sv) * | 2013-04-29 | 2014-12-16 | Dynapac Compaction Equip Ab | Excenteraxel för kompakteringsmaskin |
| DE102022111975A1 (de) | 2022-05-12 | 2023-11-16 | Mts Schrode Ag | Verfahren zur Bestimmung einer Auflast eines Baggeranbaugeräts sowie Bagger |
| DE102022117908A1 (de) | 2022-07-18 | 2024-01-18 | Mts Schrode Ag | Anbauverdichter |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE202005006059U1 (de) | 2005-04-15 | 2005-06-23 | MTS Gesellschaft für Maschinentechnik und Sonderbauten mbH | Anbauverdichter mit einstellbarer Erregermasse |
| EP1411175B1 (de) | 2002-10-15 | 2009-03-18 | Rammax Maschinenbau GmbH | Bodenverdichtungsvorrichtung |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4343865A1 (de) * | 1993-12-22 | 1995-07-13 | Ammann Duomat Verdichtung | Bodenverdichtungsgerät |
| DE10257892A1 (de) * | 2002-12-11 | 2004-06-24 | Bomag Gmbh | Vibrationsplatte |
| DE10355172B3 (de) * | 2003-11-26 | 2005-06-02 | MTS Gesellschaft für Maschinentechnik und Sonderbauten mbH | Verdichtervorrichtung eines Baggers |
| DE102005022627A1 (de) * | 2005-05-11 | 2006-11-16 | Ammann Verdichtung Gmbh | Bodenverdichtungsgerät |
| DE202007014593U1 (de) * | 2007-10-18 | 2007-12-27 | Rammax Maschinenbau Gmbh | Vibrationswalze |
-
2009
- 2009-04-22 DE DE102009018490.2A patent/DE102009018490B4/de active Active
-
2010
- 2010-04-15 EP EP10160020.3A patent/EP2243881B1/de active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1411175B1 (de) | 2002-10-15 | 2009-03-18 | Rammax Maschinenbau GmbH | Bodenverdichtungsvorrichtung |
| DE202005006059U1 (de) | 2005-04-15 | 2005-06-23 | MTS Gesellschaft für Maschinentechnik und Sonderbauten mbH | Anbauverdichter mit einstellbarer Erregermasse |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ITTO20120163A1 (it) * | 2012-02-24 | 2013-08-25 | Cangini Benne Srl | Macchina operatrice provvista di un dispositivo di basculamento per un'attrezzatura |
| WO2014108389A3 (de) * | 2013-01-10 | 2014-09-04 | Mts Maschinentechnik Schrode Ag | Verfahren zum betreiben eines anbauverdichters, sowie speichermedium und anbauverdichter |
| WO2017192083A1 (en) * | 2016-04-29 | 2017-11-09 | Construction Tools Pc Ab | Rig mounted compactor |
| US20190145061A1 (en) * | 2016-04-29 | 2019-05-16 | Construction Tools Pc Ab | Rig mounted compactor |
| DE102016009086A1 (de) * | 2016-07-26 | 2018-02-01 | Bomag Gmbh | Handgeführte Bodenverdichtungsmaschine, insbesondere Vibrationsstampfer oder Vibrationsplatte |
| US10801167B2 (en) | 2016-07-26 | 2020-10-13 | Bomag Gmbh | Hand-guided soil compaction machine |
| EP3578273A1 (de) * | 2018-06-05 | 2019-12-11 | MTS Maschinentechnik Schrode AG | Anbauverdichter |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2243881A3 (de) | 2013-01-02 |
| EP2243881B1 (de) | 2016-10-26 |
| DE102009018490A1 (de) | 2010-11-11 |
| DE102009018490B4 (de) | 2015-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2243881B1 (de) | Anbauverdichter, der an einen Bagger ankuppelbar ist, sowie Verfahren zu seinem Betrieb | |
| DE3239266C2 (de) | ||
| EP2172279B1 (de) | Vorrichtung zur Erzeugung einer Kreisschwingung oder einer gerichteten Schwingung mit stufenlos verstellbarer Schwingungsamplitude bzw. Erregerkraft | |
| DE3413091C2 (de) | ||
| EP1712681A1 (de) | Anbauverdichter mit einstellbarer Erregermasse | |
| DE2533095A1 (de) | Vorrichtung mit mindestens drei hin- und herbeweglichen kolbenfoermigen koerpern | |
| DE3148437A1 (de) | Schwingungserreger fuer mechanische schwingungen | |
| EP1536068B1 (de) | Verdichtervorrichtung eines Baggers | |
| DE10221164A1 (de) | Vibrationsmechanismus | |
| EP2434053B1 (de) | Vibrationsstampfer zur Verdichtung eines Untergrundes | |
| EP3358080A1 (de) | Handgeführte bodenverdichtungswalze mit lenkbetriebsmodus und verfahren zum lenken einer handgeführten bodenverdichtungswalze | |
| EP2891750A1 (de) | An einem trägergerät verstellbar angeordneter plattenverdichter | |
| DE19912813C1 (de) | Fahrtrichtungssteuerung für eine Bodenverdichtungsvorrichtung | |
| EP2242590B1 (de) | Unwuchterreger mit einer oder mehreren rotierbaren unwuchten | |
| EP1534439B1 (de) | Schwingungserreger für bodenverdichtungsgeräte | |
| EP3719206B1 (de) | Steuervorrichtung für bodenverdichtungsvorrichtung | |
| EP2861348B1 (de) | Backenbrecher | |
| EP1212148B1 (de) | Schwingungserreger für bodenverdichtungsgeräte | |
| WO1985000762A1 (en) | Method and device for the vibratory operation of a working piston, particularly for working tools | |
| EP3578273A1 (de) | Anbauverdichter | |
| DE2403110A1 (de) | Steuervorrichtung fuer einen vibrator | |
| DE19752445C1 (de) | Vorrichtung zur Bodenverdichtung | |
| DE102004028715B3 (de) | Schwingungserreger und Verstellvorrichtung dafür | |
| DE102006030628B4 (de) | Vorrichtung zur Verdichtung eines Baugrundes | |
| EP2050873A2 (de) | Vibrationswalze |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA ME RS |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA ME RS |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E01C 19/38 20060101AFI20121129BHEP Ipc: E02F 3/36 20060101ALI20121129BHEP Ipc: E02D 3/074 20060101ALI20121129BHEP Ipc: E02F 3/96 20060101ALI20121129BHEP |
|
| 17P | Request for examination filed |
Effective date: 20130508 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: MTS MASCHINENTECHNIK SCHRODE AG |
|
| 17Q | First examination report despatched |
Effective date: 20140326 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20151204 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160518 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 840135 Country of ref document: AT Kind code of ref document: T Effective date: 20161115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502010012614 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170126 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170227 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170226 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502010012614 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170126 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20170727 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20170415 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20171229 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170502 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170430 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170430 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170415 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170415 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170430 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 840135 Country of ref document: AT Kind code of ref document: T Effective date: 20170415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20100415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161026 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 502010012614 Country of ref document: DE Representative=s name: DREISS PATENTANWAELTE PARTG MBB, DE Ref country code: DE Ref legal event code: R081 Ref document number: 502010012614 Country of ref document: DE Owner name: MTS SCHRODE AG, DE Free format text: FORMER OWNER: MTS MASCHINENTECHNIK SCHRODE AG, 72534 HAYINGEN, DE |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20230614 Year of fee payment: 14 |