EP1967115B1 - Verfahren zur Erkennung eines Bodenbelages - Google Patents
Verfahren zur Erkennung eines Bodenbelages Download PDFInfo
- Publication number
- EP1967115B1 EP1967115B1 EP08002410A EP08002410A EP1967115B1 EP 1967115 B1 EP1967115 B1 EP 1967115B1 EP 08002410 A EP08002410 A EP 08002410A EP 08002410 A EP08002410 A EP 08002410A EP 1967115 B1 EP1967115 B1 EP 1967115B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- process according
- floor covering
- variables
- motor
- previous
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images
Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2857—User input or output elements for control, e.g. buttons, switches or displays
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/2826—Parameters or conditions being sensed the condition of the floor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2842—Suction motors or blowers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2847—Surface treating elements
Definitions
- the invention relates to a method for detecting a floor covering, such as hard floor, carpet, etc., for a vacuum cleaner, which has a fan which is driven by an electric motor, wherein the motor is designed as an electronically commutated motor and wherein a storage unit is provided.
- the vacuum cleaner is configured accordingly, for example by adjusting the suction or hard floors by limiting the suction mouth by extending bristle strips or the like. In vacuum cleaners, which have a motor-driven carpet brush, this is disabled when maintaining such a hard floor. These different configurations can be created manually by the user. It is also known to adjust these settings of the vacuum cleaner automatically depending on the surface structure of the floor covering to be maintained, self-regulating.
- the vacuum cleaner has a fan which can be driven by an electric motor, wherein the motor is designed as an electronically commutated motor and wherein a storage unit is provided.
- the invention provides that the blower motor of the vacuum cleaner is designed as electronically commutated motor, a memory unit is provided, are contained in the reference sizes for at least two floor coverings, a control unit starts a verification procedure for sensorless flooring detection, in which the motor of a first speed in a first operating point is brought to a second operating point at a second speed, the control unit during the verification procedure determines current characteristics from the engine and the current characteristics are compared with the reference variables, whereby an identification of the floor covering is achieved.
- the current parameters can be formed from direct parameters and / or from indirect parameters.
- the indirect parameters are read directly from the engine and the direct parameters can be calculated from the indirect parameters.
- the motor current, the switching angle and the rotational speed are an indirect parameter and the negative pressure and the flow rate are a direct characteristic of the fan.
- the blower motor is a switched reluctance motor operated brushless, having a rotor of a magnetic material and a stator containing magnetic coils.
- the reluctance motor is formed with a different number of distinct teeth on the rotor and stator.
- the stator teeth are wound with coils that are alternately turned on and off.
- the teeth with the energized windings each pull the nearest teeth of the rotor
- the switched motor may have only two or one phase.
- the use of a sensor for detecting the speed and / or pressure of the negative pressure in the inventive method for detecting the floor covering can be dispensed with.
- the engine is started in the verification procedure and then brought to the first speed. Subsequently, the motor approaches the second operating point, wherein in the next step, the current parameters resulting from both operating points are compared with the reference variables for identifying the floor covering.
- the control unit detects a sudden change in the current parameters during operation of the vacuum cleaner and turns off the engine for a short time. Subsequently, the engine is immediately switched on again via the control unit, wherein the motor both mentioned operating points starts again and thus the verification procedure is performed. If the user changes the floor covering during the vacuuming, the suddenly changing characteristics automatically start the floor covering detection checking procedure.
- the motor reaches its maximum speed at the second speed.
- further operating points of the engine are approached between the first and the second rotational speed, which are also taken into account in the checking procedure.
- the current parameters do not deviate more than 100%, preferably not more than 50% and particularly preferably not more than 20% from the reference variables. Deviations of the current parameters from the respective reference quantities may be taken into account in order to identify a floor covering via the verification procedure.
- a difference quotient is calculated at least between the first and the second operating point, which is determined from the current parameters and with a corresponding difference quotient from the reference variables is compared.
- the difference quotient can be calculated from the direct or indirect parameters.
- the difference quotient is calculated from the negative pressure and the flow rate.
- the control unit uses the indirect parameters such as the motor current, the switching angle or the speed to calculate the respective negative pressure and the flow in the first and in the second operating point. Subsequently, the difference quotient of the negative pressure to the flow rate is determined.
- a plurality of difference quotients can be determined, which relate to more than two operating points.
- a measure improving the invention can provide that upon a restart of the vacuum cleaner and / or during a change of the floor covering during the operation of the vacuum cleaner, the control unit starts the checking procedure.
- the control unit starts the checking procedure.
- a further advantageous embodiment of the method provides that an integral or a sum of the difference quotients is calculated between the first and the second operating point and compared with a corresponding integral or a sum of the difference quotients from the reference variables.
- each floor covering is assigned individual reference variables, wherein limit values are provided as additional reference variables and in which a defined floor covering is recognized, if in the checking procedure the current parameters correspond to the limit values.
- the defined floor covering may be, for example, a smooth floor covering. When this limit is reached, the verification procedure recognizes that there is a smooth floor covering.
- reference variables can be read into the memory unit via an interface.
- the control unit can form its own reference variables, for example via an integrated learning algorithm.
- control unit controls additional electrical modules within the vacuum cleaner.
- the additional modules may, for example, be brush elements that are switched on or off depending on the floor covering.
- Fig. 1 shows a vacuum cleaner 1, which performs an automatic detection of a floor covering.
- the vacuum cleaner 1 is designed as Robotsauger having a dust bag 9, a motor 3, which drives a fan 2, and a control unit 4.
- the motor 3 is a reluctance motor.
- the motor 3 is controlled by the control unit 4, wherein the motor 3 is additionally in communication with a power converter 10.
- the control unit 4 has a memory unit 5 and a microcontroller 6.
- the memory unit 5 contains reference variables for at least two floor coverings.
- the vacuum cleaner 1 At the bottom of the vacuum cleaner 1 brushes 8 are provided, which can be controlled if necessary. Furthermore, the vacuum cleaner 1 has an interface 7 via which reference variables can be read into the storage unit 5. In the lower region of the vacuum cleaner 1, an accumulator 12 is provided, which is connected to the control unit 4 and to the power converter 10.
- the method according to the invention for detecting the floor covering makes use of the reference variables stored in the storage unit 5, which are compared during a checking procedure with current parameters which can be determined from the motor 3, whereby an identification of the floor covering is achieved.
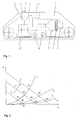
- Fig. 2 three load curves 13,14,15 are shown.
- the first load curve 13 describes a florid floor covering (eg Wilton)
- the second load curve 14 refers to a low pile floor covering (eg Duracord)
- the third load curve 15 describes a smooth floor covering (eg parquet).
- a control procedure for sensorless floor covering detection is started by the control unit 4, in which the motor 3 is brought from a first speed of a first operating point AP 1 , to a second operating point AP 2 at a second speed.
- the motor 3 is brought from a first speed of a first operating point AP 1 , to a second operating point AP 2 at a second speed.
- the current parameters are the negative pressure and the flow, which are calculated at the operating point AP 1 and at the operating point AP 2 inter alia from the motor current and the rotational speed of the motor.
- the difference quotient ( ⁇ p / ⁇ q) is determined, which results from the first operating point AP 1 and the second operating point AP 2 .
- the difference quotient which was determined from the current parameters, is compared with a corresponding difference quotient from the stored reference quantities. If both differences in quotient compare, according to the present embodiment, either the Wilton floor covering, the Duracord floor covering or the smooth floor covering is present.
- further parameters in the verification procedure can be compared with reference variables, for example the motor current, the switching angle, etc.
- the operating point AP 3 is shown, which is achieved in a third speed of the engine. This speed can represent the maximum speed of the engine.
- the engine speed is correspondingly increased from the first speed to the second speed and finally to the third speed, with the fan characteristic curve 16 shifting according to the respective speed (see arrow in FIG Fig. 2 ).
- the microcontroller 6 compares the current parameters with the reference variables, and if the reference variables for a floor covering, for example Wilton, coincide with the current parameters, the microcontroller 6 identifies the floor covering Wilton. Between the load characteristic 14 and 15, a limit characteristic 11 is shown, in which limit values are stored as additional reference variables. If, in the verification procedure, the current parameters correspond to the limit values and / or fall below the limit values, there is a defined floor covering, in the present case a smooth floor covering. If, for example, one of the operating points AP 1 to AP 3 is below the limit characteristic curve 11, the checking procedure recognizes that a smooth floor covering is present.
- the inventive method is designed such that when a floor covering change the control unit 4, the motor 3 switches off and on again for a short time and then the Verification procedure is performed.
- the change of the floor covering recognizes the control unit 4 in that sudden changes in the current parameters in each operating point arise.
- the control unit 4 the brush element 8 on or off.
- the present method can be implemented particularly well in vacuum cleaners, in which the suction mouth is not or rarely raised from the floor covering, so preferably robotic vacuum cleaners, upright vacuum cleaners or hand vacuum cleaners.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
- Geophysics And Detection Of Objects (AREA)
- Push-Button Switches (AREA)
- Floor Finish (AREA)
Description
- Die Erfindung betrifft ein Verfahren zur Erkennung eines Bodenbelages, wie Hartboden, Teppichboden etc., für einen Staubsauger, der ein Gebläse, das durch einen elektrischen Motor antreibbar ist, aufweist wobei der Motor als elektronisch kommutierter Motor ausgeführt ist und wobei eine Speichereinheit vorgesehen ist.
- Es ist bekannt, dass zur Bodenpflege in Abhängigkeit zur Art des zu pflegenden Bodenbelages der Staubsauger entsprechend konfiguriert wird, so beispielsweise durch eine Anpassung der Saugleistung oder bei Hartböden durch Begrenzung des Saugmundes durch Ausfahren von Borstenstreifen oder dergleichen. Bei Staubsaugern, die eine motorisch angetriebene Teppichbürste aufweisen, wird diese bei einer Pflege eines derartigen Hartbodens deaktiviert. Diese unterschiedlichen Konfigurationen können manuell durch den Benutzer erstellt werden. Es ist weiter bekannt, diese Einstellungen des Staubsaugers in Abhängigkeit von der Oberflächenstruktur des zu pflegenden Bodenbelages automatisch, selbstregelnd einzustellen.
- Aus der
DE 691 20 176 T2 ist offenbart, mittels Ultraschall-Wandler die Oberflächenbeschaffenheit des Bodenbelages zu ermitteln. So weisen beispielsweise Teppichböden eine weiche Oberfläche auf. Fliesen und PVC-Beläge sind hingegen als harte Bodenbeläge einzustufen. Diese unterschiedlichen Strukturen haben Auswirkungen auf einwirkende Schallwellen. Während Hartbeläge diese Wellen stark reflektieren, werden die Schallwellen von weichen Teppichböden größtenteils absorbiert. Mittels eines Ultraschallsenders wird ein Signal auf den Bodenbelag gerichtet. Das reflektierte Signal wird von einem Ultraschallempfänger aufgenommen. Das empfangene Signal wird ausgewertet und lässt über das Reflektions- bzw. Absorptionsverhalten Rückschlüsse auf die Art des Bodenbelages zu. Diese bekannte Lösung erweist sich jedoch als problematisch, da verschiedene aufgrund der Reflektion ermittelte Bodenbeläge nur schwer einzuordnen sind. So gibt es Hartböden, wie zum Beispiel Kork, die den Ultraschall sehr schwach reflektieren. Dadurch kann es zu einer Fehlauswertung des Bodenbelages kommen. Auch können stark dämpfende Teppiche eine Reflektion der Schallwellen verhindern, so dass eine genaue Auswertung nicht möglich ist. Ein weiterer Nachteil dieser bekannten Staubsauger ist, dass für die Erkennung des Bodenbelages eine komplexe und aufwendige Steuerung sowohl hinsichtlich der Sensorik als auch bezüglich der Aktorik notwendig ist. Neben den relativ hohen Realisierungskosten für einen derartigen Staubsauger hat sich nachteiligerweise gezeigt, dass eine gewisse Anfälligkeit für Störungen besteht. Darüber hinaus weisen bekannte Bodenbelagssensoren den Nachteil der Verschmutzungsanfälligkeit auf. Dieses trifft insbesondere auf optische Sensoren und Unterdrucksensoren zu, die für eine Identifizierung des Bodenbelages zum Einsatz kommen. - Aus der
US 2004/135537 A1 ist ein Verfahren zur Erkennung eines Bodenbelages, wie Hartboden, Teppichboden etc., für einen Staubsauger bekannt, welches dem Oberbegriff des unabhängigen Anspruchs 1 entspricht. Der Staubsauger besitzt ein Gebläse, das durch einen elektrischen Motor antreibbar ist, wobei der Motor als elektronisch kommutierter Motor ausgeführt ist und wobei eine Speichereinheit vorgesehen ist. - Es ist Aufgabe der vorliegenden Erfindung, ein Verfahren zur Erkennung eines Bodenbelages für einen Staubsauger zu schaffen, bei dem die genannten Nachteile vermieden werden, insbesondere ein Verfahren bereitgestellt wird, welches eine zuverlässige Identifizierung des Bodenbelages ermöglicht.
- Zur Lösung dieser Aufgabe wird ein Verfahren mit den Merkmalen des Anspruches 1 vorgeschlagen. In den abhängigen Ansprüchen sind bevorzugte Weiterbildungen ausgeführt.
- Dazu ist erfindungsgemäß vorgesehen, dass der Gebläsemotor des Staubsaugers als elektronisch kommutierter Motor ausgeführt ist, eine Speichereinheit vorgesehen ist, in der Referenzgrößen zu mindestens zwei Bodenbelägen enthalten sind, eine Steuereinheit eine Überprüfungsprozedur zur sensorlosen Bodenbelagserkennung startet, in dem der Motor von einer ersten Drehzahl in einem ersten Arbeitspunkt in einen zweiten Arbeitspunkt mit einer zweiten Drehzahl gebracht wird, die Steuereinheit während der Überprüfungsprozedur aktuelle Kenngrößen aus dem Motor bestimmt und die aktuellen Kenngrößen mit den Referenzgrößen verglichen werden, wodurch eine Identifizierung des Bodenbelages erzielt wird.
- Besonders vorteilhaft ist, dass aus dem elektronisch kommutierten Gebläsemotor diverse, aktuelle Kenngrößen, wie zum Beispiel die Drehzahl, herauslesbar sind, die für die Überprüfungsprozedur zur Bodenbelagserkennung direkt verwendet werden können. In einer möglichen Ausführungsform der Erfindung können die aktuellen Kenngrößen aus direkten Kenngrößen und/oder aus indirekten Kenngrößen gebildet sein. Die indirekten Kenngrößen werden direkt aus dem Motor gelesen und die direkten Kenngrößen lassen sich aus den indirekten Kenngrößen berechnen. Vorteilhafterweise ist der Motorstrom, der Schaltwinkel und die Drehzahl eine indirekte Kenngröße und der Unterdruck und der Durchfluss eine direkte Kenngröße des Gebläses. Während nun innerhalb der Überprüfungsprozedur der Motor von dem ersten in den zweiten Arbeitspunkt gebracht wird, liest und/oder berechnet die Steuereinheit entsprechende aktuelle Kenngrößen aus dem Motor und vergleicht in einem weiteren Schritt die aktuellen Kenngrößen mit Referenzgrößen. Falls die Referenzgrößen zu einem Bodenbelag mit den aktuellen Kenngrößen übereinstimmen, liegt eine Identifizierung dieses Bodenbelages vor.
- Vorzugsweise ist der Gebläsemotor ein geschalteter Reluktanzmotor, der bürstenlos betrieben wird, einen Rotor aus einem magnetischen Material und einen Stator aufweist, der magnetische Spulen enthält. In einer bevorzugten Ausführungsform ist der Reluktanzmotor mit einer unterschiedlichen Anzahl ausgeprägter Zähne am Rotor und Stator ausgebildet. Hierbei sind die Statorzähne mit Spulen bewickelt, die abwechselnd ein- und ausgeschaltet werden. Die Zähne mit den bestromten Wicklungen ziehen jeweils die nächstgelegenen Zähne des Rotors wie einen Elektromagneten an und werden abgeschaltet, wenn (oder kurz bevor) die Zähne des Rotors den sie anziehenden Statorzähnen gegenüberstehen. In dieser Position wird vorzugsweise die nächste Phase auf anderen Statorzähnen eingeschaltet, die wiederum andere Rotorzähne anzieht. Selbstverständlich kann der geschaltete Motor nur zwei oder eine Phase aufweisen. Bei dem Motor, insbesondere bei dem geschalteten Reluktanzmotor, der zu seinem Betrieb die Kenntnis der Rotorposition benötigt und damit die Rotordrehzahl erfasst, kann beispielsweise der vom Sauggebläse erzeugte Unterdruck durch das erfindungsgemäße Verfahren aus der Kenntnis der Drehzahl des Rotors und weiteren Kenngrößen, die die abgebende Leistung des Motors beeinflussen, rechnerisch ermittelt werden. Somit kann auf den Einsatz eines Sensors zur Drehzahl- und/oder Druckerfassung des Unterdruckes bei dem erfindungsgemäßen Verfahren zur Erkennung des Bodenbelages verzichtet werden.
- In einer besonderen Ausführungsform der Erfindung wird bei der Überprüfungsprozedur der Motor gestartet und anschließend auf die erste Drehzahl gebracht. Anschließend fährt der Motor den zweiten Arbeitspunkt an, wobei im nächsten Schritt die aus beiden Arbeitspunkten sich ergebenen aktuellen Kenngrößen mit den Referenzgrößen zur Bodenbelagsidentifizierung verglichen werden. In einer möglichen Ausführungsform der Erfindung erkennt die Steuereinheit eine plötzliche Änderung der aktuellen Kenngrößen während des Betriebes des Staubsaugers und schaltet den Motor kurzzeitig aus. Anschließend wird der Motor sofort wieder über die Steuereinheit eingeschaltet, wobei der Motor beide genannten Arbeitspunkte wieder anfährt und somit die Überprüfungsprozedur durchgeführt wird. Falls der Benutzer während des Staubsaugens den Bodenbelag wechselt, wird durch die sich plötzlich ändernden Kenngrößen automatisch die genannte Überprüfungsprozedur zur Bodenbelagserkennung gestartet.
- In einer weiteren möglichen Ausführungsform der Erfindung erreicht der Motor bei der zweiten Drehzahl seine maximale Drehzahl. Vorteilhafterweise werden zwischen der ersten und der zweiten Drehzahl weitere Arbeitspunkte des Motors angefahren, die ebenfalls bei der Überprüfungsprozedur ihre Berücksichtigung finden.
- Vorzugsweise liegt eine Bodenbelagserkennung vor, falls die aktuellen Kenngrößen nicht mehr als 100%, vorzugsweise nicht mehr als 50% und besonders bevorzugt nicht mehr als 20% von den Referenzgrößen abweichen. Abweichungen der aktuellen Kenngrößen zu den jeweiligen Referenzgrößen können Berücksichtigung finden, um über die Überprüfungsprozedur einen Bodenbelag zu identifizieren.
- In einer alternativen Ausgestaltung der Erfindung wird zumindest zwischen dem ersten und dem zweiten Arbeitspunkt ein Differenzenquotient berechnet, der aus den aktuellen Kenngrößen ermittelt wird und mit einem entsprechenden Differenzenquotienten aus den Referenzgrößen verglichen wird. Hierbei kann der Differenzenquotient aus den direkten oder aus den indirekten Kenngrößen berechnet werden. In einer möglichen Ausführung des erfindungsgemäßen Verfahrens berechnet sich der Differenzenquotient aus dem Unterdruck und dem Durchfluss. Über die indirekten Kenngrößen wie der Motorstrom, der Schaltwinkel oder die Drehzahl berechnet die Steuereinheit im ersten sowie im zweiten Arbeitspunkt den jeweiligen Unterdruck sowie den Durchfluss. Anschließend wird der Differenzenquotient des Unterdrucks zum Durchfluss ermittelt. Selbstverständlich können auch eine Vielzahl an Differenzenquotienten ermittelt werden, die sich auf mehr als zwei Arbeitspunkte beziehen.
- Eine die Erfindung verbessernde Maßnahme kann vorsehen, dass bei einem Neustart des Staubsaugers und/oder bei einem Wechsel des Bodenbelages während des Betriebes des Staubsaugers die Steuereinheit die Überprüfungsprozedur startet. In einer alternativen Ausgestaltung des Verfahrens ist es ebenfalls möglich, in einem definierten zeitlichen Abstand die Überprüfungsprozedur starten zu lassen, bei der der Motor von einer ersten Drehzahl auf eine zweite Drehzahl gebracht wird. Die beiden Drehzahlen können auch nahe beieinander liegen, so dass die Überprüfungsprozedur für den Benutzer unbemerkt bleibt.
- Eine weitere vorteilhafte Ausführungsform des Verfahrens sieht vor, dass zwischen dem ersten und dem zweiten Arbeitspunkt ein Integral oder eine Summe der Differenzenquotienten berechnet wird und mit einem entsprechenden Integral oder einer Summe der Differenzenquotienten aus den Referenzgrößen verglichen wird.
- Weiterhin kann vorteilhaft sein, dass jedem Bodenbelag individuelle Referenzgrößen zugeordnet sind, wobei Grenzwerte als zusätzliche Referenzgrößen vorgesehen sind und bei dem ein definierter Bodenbelag erkannt wird, falls bei der Überprüfungsprozedur die aktuellen Kenngrößen den Grenzwerten entsprechen. Bei dem definierten Bodenbelag kann es sich beispielsweise um einen glatten Bodenbelag handeln. Wird dieser Grenzwert erreicht, erkennt die Überprüfungsprozedur, dass ein glatter Bodenbelag vorliegt.
- Vorteilhafterweise sind über eine Schnittstelle Referenzgrößen in die Speichereinheit einlesbar. In einer weiteren vorteilhaften Ausführungsform kann die Steuereinheit ihre Referenzgrößen selber bilden, beispielsweise über einen integrierten Lernalgorithmus.
- In Abhängigkeit von der jeweiligen Bodenbelagserkennung steuert die Steuereinheit elektrische Zusatzmodule innerhalb des Staubsaugers an. Bei den Zusatzmodulen kann es sich beispielsweise um Bürstenelemente handeln, die je nach Bodenbelag ein- oder ausgeschaltet werden.
- Weitere Vorteile, Merkmale und Einzelheiten der Erfindung ergeben sich aus der nachfolgenden Beschreibung, in der unter Bezugnahme auf die Zeichnungen ein Ausführungsbeispiel der Erfindung im Einzelnen beschrieben ist. Dabei können die in den Ansprüchen und in der Beschreibung erwähnten Merkmale jeweils einzeln für sich oder in beliebiger Kombination erfindungswesentlich sein. Es zeigen:
- Figur 1
- eine schematische Darstellung eines Staubsaugers und
- Figur 2
- ein schematisches Diagramm eines Staubsaugers mit Gebläsekennlinien und drei Lastkennlinien für unterschiedliche Bodenbeläge.
-
Fig. 1 zeigt einen Staubsauger 1, der eine automatische Erkennung eines Bodenbelages durchführt. Hierbei ist der Staubsauger 1 als Robotsauger ausgeführt, der einen Staubbeutel 9, einen Motor 3, der ein Gebläse 2 antreibt, und eine Steuereinheit 4 aufweist. Bei dem Motor 3 handelt es sich um einen Reluktanzmotor. Der Motor 3 wird durch die Steuereinheit 4 gesteuert, wobei der Motor 3 mit einem Stromrichter 10 zusätzlich in Verbindung steht. Die Steuereinheit 4 weist eine Speichereinheit 5 sowie einen Mikrokontroller 6 auf. In der Speichereinheit 5 sind Referenzgrößen zu mindestens zwei Bodenbelägen enthalten. - Am Bodenbereich des Staubsaugers 1 sind Bürsten 8 vorgesehen, die bei Bedarf ansteuerbar sind. Des Weiteren verfügt der Staubsauger 1 über eine Schnittstelle 7, über die Referenzgrößen in die Speichereinheit 5 einlesbar sind. Im unteren Bereich des Staubsaugers 1 ist ein Akkumulator 12 vorgesehen, der mit der Steuereinheit 4 und mit dem Stromrichter 10 verbunden ist.
- Das erfindungsgemäße Verfahren zur Erkennung des Bodenbelages bedient sich unter anderem der in der Speichereinheit 5 hinterlegten Referenzgrößen, die während einer Überprüfungsprozedur mit aktuellen Kenngrößen, die sich aus dem Motor 3 bestimmen lassen, verglichen werden, wodurch eine Identifizierung des Bodenbelages erzielt wird. In
Fig. 2 sind drei Lastkennlinien 13,14,15 dargestellt. Die erste Lastkennlinie 13 beschreibt einen florigen Bodenbelag (z. B. Wilton), die zweite Lastkennlinie 14 bezieht sich auf einen niederflorigen Bodenbelag (z. B. Duracord) und die dritte Lastkennlinie 15 beschreibt einen glatten Bodenbelag (z. B. Parkett). Bei dem Verfahren zur Erkennung des Bodenbelages wird von der Steuereinheit 4 eine Überprüfungsprozedur zur sensorlosen Bodenbelagserkennung gestartet, in dem der Motor 3 von einer ersten Drehzahl eines ersten Arbeitspunktes AP1, in einen zweiten Arbeitspunkt AP2 mit einer zweiten Drehzahl gebracht wird. Es findet somit ein "Systemhochlauf" statt. - Im Arbeitspunkt AP1 sowie im Arbeitspunkt AP2 werden die dargestellten aktuellen Kenngrößen aus dem Motor 3 bestimmt und mit nicht dargestellten Referenzgrößen verglichen.
- Im vorliegenden Ausführungsbeispiel handelt es sich bei den aktuellen Kenngrößen um den Unterdruck sowie den Durchfluss, die im Arbeitspunkt AP1 und im Arbeitspunkt AP2 unter anderem aus dem Motorstrom und der Drehzahl des Motors berechnet werden. Anschließend wird der Differenzenquotient (Δp / Δq) ermittelt, der sich aus dem ersten Arbeitspunkt AP1 und dem zweiten Arbeitspunkt AP2 ergibt. Anschließend wird der Differenzenquotient, der aus den aktuellen Kenngrößen ermittelt wurde, mit einem entsprechenden Differenzenquotienten aus den gespeicherten Referenzgrößen verglichen. Stimmen beide zu vergleichende Differenzenquotienten überein, liegt gemäß dem vorliegenden Ausführungsbeispiel entweder der Bodenbelag Wilton, der Bodenbelag Duracord oder der glatte Bodenbelag vor. Selbstverständlich können während der Überprüfungsprozedur auch weitere Kenngrößen bei der Überprüfungsprozedur mit Referenzgrößen verglichen werden, beispielsweise der Motorstrom, der Schaltwinkel etc.
- Während des Systemhochlaufs können alternativ eine Vielzahl an Arbeitspunkten angefahren werden, aus denen in dem jeweiligen Arbeitspunkt die entsprechenden Kenngrößen ausgelesen werden. Beispielhaft ist der Arbeitspunkt AP3 eingezeichnet, der in einer dritten Drehzahl des Motors erreicht wird. Diese Drehzahl kann die maximale Drehzahl des Motors darstellen. Um die jeweiligen Arbeitspunkte AP1, AP2 und AP3 zu erreichen, wird entsprechend die Motordrehzahl von der ersten Drehzahl, auf die zweite Drehzahl und schließlich auf die dritte Drehzahl erhöht, wobei sich entsprechend der jeweiligen Drehzahl die Gebläsekennlinie 16 verschiebt (siehe Pfeil in
Fig. 2 ). - Bei der vorliegenden Ausführungsform ist der Mikrokontroller 6 vorgesehen, der die aktuellen Kenngrößen mit den Referenzgrößen vergleicht, und falls die Referenzgrößen zu einem Bodenbelag, beispielsweise Wilton mit den aktuellen Kenngrößen übereinstimmen, identifiziert der Mikrokontroller 6 den Bodenbelag Wilton. Zwischen der Lastkennlinie 14 und 15 ist eine Grenzkennlinie 11 dargestellt, bei der Grenzwerte als zusätzliche Referenzgrößen hinterlegt sind. Falls bei der Überprüfungsprozedur die aktuellen Kenngrößen den Grenzwerten entsprechen und/oder die Grenzwerte unterschreiten, liegt ein definierter Bodenbelag, im vorliegenden Fall ein glatter Bodenbelag vor. Befindet sich beispielsweise einer der Arbeitspunkte AP1 bis AP3 unterhalb der Grenzkennlinie 11, erkennt die Überprüfungsprozedur, dass ein glatter Bodenbelag vorliegt.
- Das erfindungsgemäße Verfahren ist derart ausgelegt, dass bei einem Bodenbelagswechsel die Steuereinheit 4 den Motor 3 kurzzeitig ausschaltet und wieder einschaltet und anschließend die Überprüfungsprozedur durchgeführt wird. Den Wechsel des Bodenbelags erkennt die Steuereinheit 4 dadurch, dass plötzliche Änderungen der aktuellen Kenngrößen im jeweiligen Arbeitspunkt entstehen. In Abhängigkeit von der jeweiligen Bodenbelagserkennung können beispielsweise die Steuereinheit 4 das Bürstenelement 8 ein- oder ausschalten. Das vorliegende Verfahren lässt sich insbesondere bei Staubsaugern gut realisieren, bei denen der Saugmund nicht oder nur selten vom Bodenbelag angehoben wird, also vorzugsweise bei Robotsaugern, Upright-Staubsaugern oder Handstaubsaugern.
Claims (19)
- Verfahren zur Erkennung eines Bodenbelages, wie Hartboden, Teppichboden etc., für einen Staubsauger (1), der ein Gebläse (2), das durch einen elektrischen Motor (3) antreibbar ist, aufweist, wobei der Motor (3) als elektronisch kommutierter Motor (3) ausgeführt ist und wobei eine Speichereinheit (5) vorgesehen ist,
dadurch gekennzeichnet,
dass in der Speichereinheit (5) Referenzgrößen zu mindestens zwei Bodenbelägen enthalten sind, dass eine Steuereinheit (4) eine Überprüfungsprozedur zur sensorlosen Bodenbelagserkennung startet, in dem der Motor (3) von einer ersten Drehzahl in einem ersten Arbeitspunkt in einen zweiten Arbeitspunkt mit einer zweiten Drehzahl gebracht wird, dass die Steuereinheit (4) während der Überprüfungsprozedur aktuelle Kenngrößen aus dem Motor (3) bestimmt, und dass die aktuellen Kenngrößen mit den Referenzgrößen verglichen werden, wodurch eine Identifizierung des Bodenbelages erzielt wird. - Verfahren nach Anspruch 1,
dadurch gekennzeichnet,
dass bei der Überprüfungsprozedur der Motor (3) gestartet wird und auf die erste Drehzahl gebracht wird. - Verfahren nach Anspruch 1 oder 2,
dadurch gekennzeichnet,
dass der Motor (3) bei der zweiten Drehzahl seine maximale Drehzahl erreicht. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass zwischen der ersten und der zweiten Drehzahl weitere Arbeitspunkte des Motors (3) angefahren werden. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass ein Mikrokontroller (6) vorgesehen ist, der die aktuellen Kenngrößen mit den Referenzgrößen vergleicht und falls die Referenzgrößen zu einem Bodenbelag mit den aktuellen Kenngrößen übereinstimmen, der Mikrokontroller (6) einen Bodenbelag identifiziert. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass die aktuellen Kenngrößen aus direkten Kenngrößen und/oder indirekten Kenngrößen gebildet sind. - Verfahren nach Anspruch 6,
dadurch gekennzeichnet,
dass die indirekten Kenngrößen aus dem Motor gelesen werden und die direkten Kenngrößen aus den indirekten Kenngrößen berechnet werden. - Verfahren nach Anspruch 6 oder 7,
dadurch gekennzeichnet,
dass der Unterdruck und der Durchfluss eine direkte Kenngröße ist. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass der Motorstrom, der Schaltwinkel und die Drehzahl eine indirekte Kenngröße ist. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass eine Bodenbelagserkennung vorliegt, falls die aktuellen Kenngrößen nicht mehr als 100%, vorzugsweise nicht mehr als 50% und besonders bevorzugt nicht mehr als 20% von den Referenzgrößen abweichen. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass zumindest zwischen dem ersten und dem zweiten Arbeitspunkt ein Differenzenquotient berechnet wird, der aus den aktuellen Kenngrößen ermittelt wird und mit einem entsprechenden Differenzenquotienten aus den Referenzgrößen verglichen wird. - Verfahren nach Anspruch 11,
dadurch gekennzeichnet,
dass zwischen dem ersten und dem zweiten Arbeitspunkt ein Integral oder eine Summe der Differenzenquotienten berechnet wird und mit einem entsprechenden Integral oder einer Summe der Differenzenquotienten aus den Referenzgrößen verglichen wird. - Verfahren nach Anspruch 11 oder 12,
dadurch gekennzeichnet,
dass der Differenzenquotient aus den direkten oder den indirekten Kenngrößen berechnet wird. - Verfahren nach Anspruch 13,
dadurch gekennzeichnet,
dass der Differenzenquotient aus dem Unterdruck und dem aus dem Unterdruck sich ergebenden Durchfluss berechnet wird. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass bei einem Neustart des Staubsaugers (1) und/oder bei einem Wechsel des Bodenbelages während des Betriebes des Staubsaugers (1) die Steuereinheit (4) die Überprüfungsprozedur startet. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass über eine Schnittstelle (7) Referenzgrößen in die Speichereinheit (5) einlesbar sind. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass jedem Bodenbelag individuelle Referenzgrößen zugeordnet sind, wobei Grenzwerte als zusätzliche Referenzgrößen vorgesehen sind, bei dem ein definierter Bodenbelag erkannt wird, falls bei der Überprüfungsprozedur die aktuellen Kenngrößen den Grenzwerten entsprechen. - Verfahren nach einem der vorhergehenden Ansprüche,
dadurch gekennzeichnet,
dass in Abhängigkeit von der jeweiligen Bodenbelagserkennung die Steuereinheit (4) elektrische Zusatzmodule (8), insbesondere Bürstenelemente ansteuert. - Staubsauger (1), der nach einem der vorhergehenden Ansprüche betreibbar ist, wobei der Staubsauger (1) ein Robotsauger, ein Handstaubsauger oder ein Upright-Staubsauger ist.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL08002410T PL1967115T3 (pl) | 2007-03-07 | 2008-02-09 | Sposób rozpoznawania wykładziny podłogowej |
| SI200830073T SI1967115T1 (sl) | 2007-03-07 | 2008-02-09 | Postopek za prepoznavanje talne obloge |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007011381A DE102007011381B3 (de) | 2007-03-07 | 2007-03-07 | Verfahren zur Erkennung eines Bodenbelages |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1967115A2 EP1967115A2 (de) | 2008-09-10 |
| EP1967115A3 EP1967115A3 (de) | 2009-09-09 |
| EP1967115B1 true EP1967115B1 (de) | 2010-07-28 |
Family
ID=39277939
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08002410A Active EP1967115B1 (de) | 2007-03-07 | 2008-02-09 | Verfahren zur Erkennung eines Bodenbelages |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP1967115B1 (de) |
| AT (1) | ATE475349T1 (de) |
| DE (2) | DE102007011381B3 (de) |
| PL (1) | PL1967115T3 (de) |
| SI (1) | SI1967115T1 (de) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015104250A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines zumindest teilweise mit Teppich belegten Bodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104244A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Bodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104251A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Hartbodens mit einem selbstfahrenden Bodenpflegegerät |
| WO2024010712A1 (en) * | 2022-07-07 | 2024-01-11 | Irobot Corporation | Mobile cleaning robot with variable cleaning features |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011052023A1 (de) * | 2011-07-21 | 2013-01-24 | Miele & Cie. Kg | Verfahren zur Füllstandsüberwachung bei einem Staubsauger |
| DE102012102631A1 (de) * | 2012-03-27 | 2013-10-02 | Alfred Kärcher Gmbh & Co. Kg | Verfahren zum Einstellen eines Saugsystems, Verfahren zum Betreiben eines Saugsystems und Saugsystem |
| DE102012107765B4 (de) | 2012-08-23 | 2020-02-13 | Miele & Cie. Kg | Robotsauger und Verfahren zum Betrieb eines Robotsaugers |
| DE102013223864A1 (de) | 2013-11-21 | 2015-05-21 | BSH Hausgeräte GmbH | Verfahren zum Betreiben eines Staubsaugers und Staubsauger |
| DE102016206917A1 (de) * | 2016-04-22 | 2017-10-26 | BSH Hausgeräte GmbH | Verfahren zur Leistungsanpassung eines akkumulatorbetriebenen Staubsaugers |
| DE102018209383A1 (de) | 2018-06-13 | 2019-12-19 | Robert Bosch Gmbh | Verfahren zum Bestimmen der Beschaffenheit eines Bodens |
| DE102018209385A1 (de) | 2018-06-13 | 2019-12-19 | Robert Bosch Gmbh | Verfahren zum Bestimmen der Beschaffenheit eines Bodens |
| DE102020205767A1 (de) | 2020-05-07 | 2021-11-11 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Ermitteln mindestens einer Information zu einem Boden |
| DE102021200388B4 (de) * | 2021-01-18 | 2023-09-28 | BSH Hausgeräte GmbH | Einlernfunktion für Staubsauger mit Motordüsen |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0790009B2 (ja) * | 1988-03-07 | 1995-10-04 | 株式会社日立製作所 | 電気掃除機の制御方法 |
| KR920007588B1 (ko) * | 1990-08-29 | 1992-09-08 | 주식회사 금성사 | 자동주행청소기의 카페트 및 계단감지장치 및 방법 |
| US7076830B2 (en) * | 2003-01-09 | 2006-07-18 | Royal Appliance Mfg. Co. | Electronically commutated drive system for vacuum cleaner |
| DE102005044617A1 (de) * | 2004-10-01 | 2006-04-13 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Pflegen und/oder Reinigen eines Bodenbelages sowie Bodenbelag und Bodenpflege- und oder Reinigungsgerät hierzu |
| DE102007025389A1 (de) * | 2007-05-30 | 2008-12-04 | Miele & Cie. Kg | Verfahren zum Betreiben eines Staubsaugers und Staubsauger zur Durchführung eines solchen Verfahrens |
-
2007
- 2007-03-07 DE DE102007011381A patent/DE102007011381B3/de not_active Expired - Fee Related
-
2008
- 2008-02-09 AT AT08002410T patent/ATE475349T1/de active
- 2008-02-09 DE DE502008001004T patent/DE502008001004D1/de active Active
- 2008-02-09 SI SI200830073T patent/SI1967115T1/sl unknown
- 2008-02-09 EP EP08002410A patent/EP1967115B1/de active Active
- 2008-02-09 PL PL08002410T patent/PL1967115T3/pl unknown
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015104250A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines zumindest teilweise mit Teppich belegten Bodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104244A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Bodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104251A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Hartbodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104251B4 (de) | 2015-03-20 | 2022-05-19 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Hartbodens mit einem selbstfahrenden Bodenpflegegerät |
| WO2024010712A1 (en) * | 2022-07-07 | 2024-01-11 | Irobot Corporation | Mobile cleaning robot with variable cleaning features |
Also Published As
| Publication number | Publication date |
|---|---|
| DE502008001004D1 (de) | 2010-09-09 |
| ATE475349T1 (de) | 2010-08-15 |
| EP1967115A2 (de) | 2008-09-10 |
| EP1967115A3 (de) | 2009-09-09 |
| PL1967115T3 (pl) | 2010-12-31 |
| DE102007011381B3 (de) | 2008-05-15 |
| SI1967115T1 (sl) | 2010-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1967115B1 (de) | Verfahren zur Erkennung eines Bodenbelages | |
| DE10355651B4 (de) | Verfahren zur Optimierung des Wirkungsgrades eines unter Last betriebenen Motors | |
| DE60103960T2 (de) | Umrichtersteuerschaltung eines motorgetriebenen Lüfters für elektrischen Staubsauger, dieselbe nutzende Antriebssteuerungsschaltung, und diese Antriebssteuerungsschaltung nutzender elektrischer Staubsauger | |
| DE69903883T2 (de) | Reinigungsgerät und Verfahren mit Sanftanlauf | |
| DE102009020842B4 (de) | System zum Steuern der Geschwindigkeit eines Elektromotors in einem Kraftfahrzeug | |
| EP1997412B1 (de) | Verfahren zum Betreiben eines Staubsaugers | |
| EP2548491B1 (de) | Staubsauger und Verfahren zum Betrieb eines Staubsaugers | |
| EP3569124B1 (de) | Reinigungsgerät | |
| DE102009018338A1 (de) | Verfahren zum Betrieb eines Vorsatzgeräts für einen Staubsauger und korrespondierendes Vorsatzgerät | |
| EP2875767B1 (de) | Verfahren zum Betreiben eines Staubsaugers und Staubsauger | |
| EP3479745B1 (de) | Verfahren zum betrieb eines elektrischen antriebs, vorzugsweise eines gebläses und/oder einer bürste eines staubsaugers oder eines staubsaugroboters | |
| DE112006001535T5 (de) | Antriebsvorrichtung eines Öffnungs-/Schließkörpers | |
| DE102012107765B4 (de) | Robotsauger und Verfahren zum Betrieb eines Robotsaugers | |
| DE102015100353A1 (de) | Verfahren zur Steuerung eines Staubsaugers, Steuereinrichtung für einen Staubsauger und Staubsauger | |
| EP4212082B1 (de) | Staubsauger, vorzugsweise handstaubsauger | |
| DE102014108479A1 (de) | Verfahren und Einstellvorrichtung zum Einstellen einer Betriebsleistung einer Saugvorrichtung, Handgriff zum Führen einer Saugvorrichtung sowie Saugvorrichtung | |
| EP4029423B1 (de) | Einlernfunktion für staubsauger mit motordüsen | |
| EP3235414A1 (de) | Verfahren zur leistungsanpassung eines akkumulatorbetriebenen staubsaugers | |
| EP4327709B1 (de) | Staubsauger, vorzugsweise handstaubsauger | |
| EP4238470A1 (de) | Bodenreinigungsgerät mit steuerung einer flüssigkeitszufuhr sowie verfahren | |
| EP4147624B1 (de) | Bodenreinigungsgerät mit bodenerkennung und verfahren | |
| DE102019130910A1 (de) | Staubsauger und Verfahren zum Betrieb eines Staubsaugers | |
| EP4238469B1 (de) | Reinigungsgerät mit erkennung des zustands einer oberfläche und verfahren | |
| DE102019104429A1 (de) | Bodenpflegegerät und Verfahren zum Betrieb eines Bodenpflegegeräts | |
| EP3312986B1 (de) | Verkürzung der ausrichtphase bei einem reluktanzmotor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| 17P | Request for examination filed |
Effective date: 20090901 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REF | Corresponds to: |
Ref document number: 502008001004 Country of ref document: DE Date of ref document: 20100909 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20100728 |
|
| LTIE | Lt: invalidation of european patent or patent extension |
Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101028 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101028 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101128 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| REG | Reference to a national code |
Ref country code: HU Ref legal event code: AG4A Ref document number: E009333 Country of ref document: HU |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101029 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101108 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: LICE Effective date: 20101021 |
|
| 26N | No opposition filed |
Effective date: 20110429 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502008001004 Country of ref document: DE Effective date: 20110429 |
|
| BERE | Be: lapsed |
Owner name: MIELE & CIE. K.G. Effective date: 20110228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20120209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120229 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120229 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100728 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 475349 Country of ref document: AT Kind code of ref document: T Effective date: 20130209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130209 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: HU Payment date: 20150213 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SI Payment date: 20150128 Year of fee payment: 8 Ref country code: SE Payment date: 20150223 Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20160203 Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160210 Ref country code: SI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160210 |
|
| REG | Reference to a national code |
Ref country code: SI Ref legal event code: KO00 Effective date: 20161013 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160210 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170209 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20220228 Year of fee payment: 15 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230529 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502008001004 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230901 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20240129 Year of fee payment: 17 Ref country code: IT Payment date: 20240222 Year of fee payment: 17 Ref country code: FR Payment date: 20240226 Year of fee payment: 17 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250228 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20250209 |