EP1967115B1 - Procédé de reconnaissance d'un revêtement de sol - Google Patents
Procédé de reconnaissance d'un revêtement de sol Download PDFInfo
- Publication number
- EP1967115B1 EP1967115B1 EP08002410A EP08002410A EP1967115B1 EP 1967115 B1 EP1967115 B1 EP 1967115B1 EP 08002410 A EP08002410 A EP 08002410A EP 08002410 A EP08002410 A EP 08002410A EP 1967115 B1 EP1967115 B1 EP 1967115B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- process according
- floor covering
- variables
- motor
- previous
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 62
- 230000006870 function Effects 0.000 claims 1
- 238000001514 detection method Methods 0.000 abstract description 10
- 238000007689 inspection Methods 0.000 abstract 1
- 238000012795 verification Methods 0.000 description 14
- 238000009408 flooring Methods 0.000 description 4
- 238000011156 evaluation Methods 0.000 description 2
- 238000010521 absorption reaction Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000007799 cork Substances 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 238000002604 ultrasonography Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images
Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2857—User input or output elements for control, e.g. buttons, switches or displays
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/2826—Parameters or conditions being sensed the condition of the floor
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2842—Suction motors or blowers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2836—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means characterised by the parts which are controlled
- A47L9/2847—Surface treating elements
Definitions
- the invention relates to a method for detecting a floor covering, such as hard floor, carpet, etc., for a vacuum cleaner, which has a fan which is driven by an electric motor, wherein the motor is designed as an electronically commutated motor and wherein a storage unit is provided.
- the vacuum cleaner is configured accordingly, for example by adjusting the suction or hard floors by limiting the suction mouth by extending bristle strips or the like. In vacuum cleaners, which have a motor-driven carpet brush, this is disabled when maintaining such a hard floor. These different configurations can be created manually by the user. It is also known to adjust these settings of the vacuum cleaner automatically depending on the surface structure of the floor covering to be maintained, self-regulating.
- the vacuum cleaner has a fan which can be driven by an electric motor, wherein the motor is designed as an electronically commutated motor and wherein a storage unit is provided.
- the invention provides that the blower motor of the vacuum cleaner is designed as electronically commutated motor, a memory unit is provided, are contained in the reference sizes for at least two floor coverings, a control unit starts a verification procedure for sensorless flooring detection, in which the motor of a first speed in a first operating point is brought to a second operating point at a second speed, the control unit during the verification procedure determines current characteristics from the engine and the current characteristics are compared with the reference variables, whereby an identification of the floor covering is achieved.
- the current parameters can be formed from direct parameters and / or from indirect parameters.
- the indirect parameters are read directly from the engine and the direct parameters can be calculated from the indirect parameters.
- the motor current, the switching angle and the rotational speed are an indirect parameter and the negative pressure and the flow rate are a direct characteristic of the fan.
- the blower motor is a switched reluctance motor operated brushless, having a rotor of a magnetic material and a stator containing magnetic coils.
- the reluctance motor is formed with a different number of distinct teeth on the rotor and stator.
- the stator teeth are wound with coils that are alternately turned on and off.
- the teeth with the energized windings each pull the nearest teeth of the rotor
- the switched motor may have only two or one phase.
- the use of a sensor for detecting the speed and / or pressure of the negative pressure in the inventive method for detecting the floor covering can be dispensed with.
- the engine is started in the verification procedure and then brought to the first speed. Subsequently, the motor approaches the second operating point, wherein in the next step, the current parameters resulting from both operating points are compared with the reference variables for identifying the floor covering.
- the control unit detects a sudden change in the current parameters during operation of the vacuum cleaner and turns off the engine for a short time. Subsequently, the engine is immediately switched on again via the control unit, wherein the motor both mentioned operating points starts again and thus the verification procedure is performed. If the user changes the floor covering during the vacuuming, the suddenly changing characteristics automatically start the floor covering detection checking procedure.
- the motor reaches its maximum speed at the second speed.
- further operating points of the engine are approached between the first and the second rotational speed, which are also taken into account in the checking procedure.
- the current parameters do not deviate more than 100%, preferably not more than 50% and particularly preferably not more than 20% from the reference variables. Deviations of the current parameters from the respective reference quantities may be taken into account in order to identify a floor covering via the verification procedure.
- a difference quotient is calculated at least between the first and the second operating point, which is determined from the current parameters and with a corresponding difference quotient from the reference variables is compared.
- the difference quotient can be calculated from the direct or indirect parameters.
- the difference quotient is calculated from the negative pressure and the flow rate.
- the control unit uses the indirect parameters such as the motor current, the switching angle or the speed to calculate the respective negative pressure and the flow in the first and in the second operating point. Subsequently, the difference quotient of the negative pressure to the flow rate is determined.
- a plurality of difference quotients can be determined, which relate to more than two operating points.
- a measure improving the invention can provide that upon a restart of the vacuum cleaner and / or during a change of the floor covering during the operation of the vacuum cleaner, the control unit starts the checking procedure.
- the control unit starts the checking procedure.
- a further advantageous embodiment of the method provides that an integral or a sum of the difference quotients is calculated between the first and the second operating point and compared with a corresponding integral or a sum of the difference quotients from the reference variables.
- each floor covering is assigned individual reference variables, wherein limit values are provided as additional reference variables and in which a defined floor covering is recognized, if in the checking procedure the current parameters correspond to the limit values.
- the defined floor covering may be, for example, a smooth floor covering. When this limit is reached, the verification procedure recognizes that there is a smooth floor covering.
- reference variables can be read into the memory unit via an interface.
- the control unit can form its own reference variables, for example via an integrated learning algorithm.
- control unit controls additional electrical modules within the vacuum cleaner.
- the additional modules may, for example, be brush elements that are switched on or off depending on the floor covering.
- Fig. 1 shows a vacuum cleaner 1, which performs an automatic detection of a floor covering.
- the vacuum cleaner 1 is designed as Robotsauger having a dust bag 9, a motor 3, which drives a fan 2, and a control unit 4.
- the motor 3 is a reluctance motor.
- the motor 3 is controlled by the control unit 4, wherein the motor 3 is additionally in communication with a power converter 10.
- the control unit 4 has a memory unit 5 and a microcontroller 6.
- the memory unit 5 contains reference variables for at least two floor coverings.
- the vacuum cleaner 1 At the bottom of the vacuum cleaner 1 brushes 8 are provided, which can be controlled if necessary. Furthermore, the vacuum cleaner 1 has an interface 7 via which reference variables can be read into the storage unit 5. In the lower region of the vacuum cleaner 1, an accumulator 12 is provided, which is connected to the control unit 4 and to the power converter 10.
- the method according to the invention for detecting the floor covering makes use of the reference variables stored in the storage unit 5, which are compared during a checking procedure with current parameters which can be determined from the motor 3, whereby an identification of the floor covering is achieved.
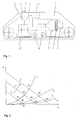
- Fig. 2 three load curves 13,14,15 are shown.
- the first load curve 13 describes a florid floor covering (eg Wilton)
- the second load curve 14 refers to a low pile floor covering (eg Duracord)
- the third load curve 15 describes a smooth floor covering (eg parquet).
- a control procedure for sensorless floor covering detection is started by the control unit 4, in which the motor 3 is brought from a first speed of a first operating point AP 1 , to a second operating point AP 2 at a second speed.
- the motor 3 is brought from a first speed of a first operating point AP 1 , to a second operating point AP 2 at a second speed.
- the current parameters are the negative pressure and the flow, which are calculated at the operating point AP 1 and at the operating point AP 2 inter alia from the motor current and the rotational speed of the motor.
- the difference quotient ( ⁇ p / ⁇ q) is determined, which results from the first operating point AP 1 and the second operating point AP 2 .
- the difference quotient which was determined from the current parameters, is compared with a corresponding difference quotient from the stored reference quantities. If both differences in quotient compare, according to the present embodiment, either the Wilton floor covering, the Duracord floor covering or the smooth floor covering is present.
- further parameters in the verification procedure can be compared with reference variables, for example the motor current, the switching angle, etc.
- the operating point AP 3 is shown, which is achieved in a third speed of the engine. This speed can represent the maximum speed of the engine.
- the engine speed is correspondingly increased from the first speed to the second speed and finally to the third speed, with the fan characteristic curve 16 shifting according to the respective speed (see arrow in FIG Fig. 2 ).
- the microcontroller 6 compares the current parameters with the reference variables, and if the reference variables for a floor covering, for example Wilton, coincide with the current parameters, the microcontroller 6 identifies the floor covering Wilton. Between the load characteristic 14 and 15, a limit characteristic 11 is shown, in which limit values are stored as additional reference variables. If, in the verification procedure, the current parameters correspond to the limit values and / or fall below the limit values, there is a defined floor covering, in the present case a smooth floor covering. If, for example, one of the operating points AP 1 to AP 3 is below the limit characteristic curve 11, the checking procedure recognizes that a smooth floor covering is present.
- the inventive method is designed such that when a floor covering change the control unit 4, the motor 3 switches off and on again for a short time and then the Verification procedure is performed.
- the change of the floor covering recognizes the control unit 4 in that sudden changes in the current parameters in each operating point arise.
- the control unit 4 the brush element 8 on or off.
- the present method can be implemented particularly well in vacuum cleaners, in which the suction mouth is not or rarely raised from the floor covering, so preferably robotic vacuum cleaners, upright vacuum cleaners or hand vacuum cleaners.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Electric Vacuum Cleaner (AREA)
- Geophysics And Detection Of Objects (AREA)
- Push-Button Switches (AREA)
- Floor Finish (AREA)
Claims (19)
- Procédé de reconnaissance d'un revêtement de sol, tel que sol dur, sol moquette, etc., pour un aspirateur (1) qui présente un ventilateur (2) qui peut être entraîné par un moteur (3) électrique, le moteur (3) étant réalisé sous forme de moteur (3) à commutation électronique, et une unité de mémoire (5) étant prévue,
caractérisé en ce que des grandeurs de référence concernant au moins deux revêtements de sol sont contenues dans l'unité de mémoire (5), en ce qu'une unité de commande (4) lance une procédure de contrôle pour la reconnaissance sans capteur de revêtements de sol par le fait que le moteur (3) est amené à partir d'une première vitesse de rotation dans un premier point de travail à un deuxième point de travail avec une deuxième vitesse de rotation, en ce que l'unité de commande (4) détermine, pendant la procédure de contrôle, des grandeurs caractéristiques actuelles à partir du moteur (3), et en ce que les grandeurs caractéristiques actuelles sont comparées aux grandeurs de référence, ce qui réalise une identification du revêtement de sol. - Procédé selon la revendication 1,
caractérisé en ce que,
lors de la procédure de contrôle, le moteur (3) est lancé et est amené à la première vitesse de rotation. - Procédé selon la revendication 1 ou 2,
caractérisé en ce que
le moteur (3) atteint sa vitesse de rotation maximale en présence de la deuxième vitesse de rotation. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que,
entre la première et la deuxième vitesse de rotation, d'autres points de travail du moteur (3) sont mis en oeuvre. - Procédé selon l'une des revendications précédentes,
caractérisé en ce
qu'un microcontrôleur (6) est prévu qui compare les grandeurs caractéristiques actuelles aux grandeurs de référence et, si les grandeurs de référence concernant un revêtement de sol coïncident avec les grandeurs caractéristiques actuelles, le microcontrôleur (6) identifie un revêtement de sol. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que
les grandeurs caractéristiques actuelles sont formées à partir de grandeurs caractéristiques directes et/ou de grandeurs caractéristiques indirectes. - Procédé selon la revendication 6,
caractérisé en ce que
les grandeurs caractéristiques indirectes sont extraites du moteur, et en ce que les grandeurs caractéristiques directes sont calculées à partir des grandeurs caractéristiques indirectes. - Procédé selon la revendication 6 ou 7,
caractérisé en ce que
la dépression et le débit sont des grandeurs caractéristiques directes. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que
le courant du moteur, l'angle de commutation et la vitesse de rotation sont des grandeurs caractéristiques indirectes. - Procédé selon l'une des revendications précédentes,
caractérisé en ce
qu'il y a reconnaissance d'un revêtement de sol si les grandeurs caractéristiques actuelles ne diffèrent pas des grandeurs de référence de plus de 100%, de préférence de plus de 50% et de façon particulièrement préférée de plus de 20%. - Procédé selon l'une des revendications précédentes,
caractérisé en ce
qu'au moins entre le premier point de travail et le deuxième point de travail, il est calculé un quotient différentiel qui est déterminé à partir des grandeurs caractéristiques actuelles et est comparé à un quotient différentiel correspondant tiré des grandeurs de référence. - Procédé selon la revendication 11,
caractérisé en ce que,
entre le premier point de travail et le deuxième point de travail, il est calculé une intégrale ou une somme des quotients différentiels qui est comparée à une intégrale correspondante ou à une somme des quotients différentiels tirés des grandeurs de référence. - Procédé selon la revendication 11 ou 12,
caractérisé en ce que
le quotient différentiel est calculé à partir des grandeurs caractéristiques directes ou indirectes. - Procédé selon la revendication 13,
caractérisé en ce que
le quotient différentiel est calculé à partir de la dépression et du débit résultant de la dépression. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que,
lors d'un redémarrage de l'aspirateur (1) et/ou lors d'un changement du revêtement de sol pendant le fonctionnement de l'aspirateur (1), l'unité de commande (4) lance la procédure de contrôle. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que
des grandeurs de référence sont introduites dans l'unité de mémoire (5) via une interface (7). - Procédé selon l'une des revendications précédentes,
caractérisé en ce que
des grandeurs de référence individuelles sont affectées à chaque revêtement de sol, des valeurs limites étant prévues en tant que grandeurs de référence supplémentaires, dans lequel un revêtement de sol défini est reconnu si, lors de la procédure de contrôle, les grandeurs caractéristiques actuelles correspondent aux valeurs limites. - Procédé selon l'une des revendications précédentes,
caractérisé en ce que,
en fonction de la reconnaissance respective de revêtement de sol, l'unité de commande (4) pilote des modules supplémentaires électriques (8), en particulier des éléments de brosse. - Aspirateur (1) qui peut être mis en oeuvre selon l'une des revendications précédentes, l'aspirateur (1) étant un aspirateur robot, un aspirateur manuel ou un aspirateur-balai.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SI200830073T SI1967115T1 (sl) | 2007-03-07 | 2008-02-09 | Postopek za prepoznavanje talne obloge |
| PL08002410T PL1967115T3 (pl) | 2007-03-07 | 2008-02-09 | Sposób rozpoznawania wykładziny podłogowej |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007011381A DE102007011381B3 (de) | 2007-03-07 | 2007-03-07 | Verfahren zur Erkennung eines Bodenbelages |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1967115A2 EP1967115A2 (fr) | 2008-09-10 |
| EP1967115A3 EP1967115A3 (fr) | 2009-09-09 |
| EP1967115B1 true EP1967115B1 (fr) | 2010-07-28 |
Family
ID=39277939
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08002410A Active EP1967115B1 (fr) | 2007-03-07 | 2008-02-09 | Procédé de reconnaissance d'un revêtement de sol |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP1967115B1 (fr) |
| AT (1) | ATE475349T1 (fr) |
| DE (2) | DE102007011381B3 (fr) |
| PL (1) | PL1967115T3 (fr) |
| SI (1) | SI1967115T1 (fr) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015104251A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Hartbodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104244A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Bodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104250A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines zumindest teilweise mit Teppich belegten Bodens mit einem selbstfahrenden Bodenpflegegerät |
| WO2024010712A1 (fr) * | 2022-07-07 | 2024-01-11 | Irobot Corporation | Robot de nettoyage mobile à caractéristiques de nettoyage variables |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011052023A1 (de) * | 2011-07-21 | 2013-01-24 | Miele & Cie. Kg | Verfahren zur Füllstandsüberwachung bei einem Staubsauger |
| DE102012102631A1 (de) | 2012-03-27 | 2013-10-02 | Alfred Kärcher Gmbh & Co. Kg | Verfahren zum Einstellen eines Saugsystems, Verfahren zum Betreiben eines Saugsystems und Saugsystem |
| DE102012107765B4 (de) | 2012-08-23 | 2020-02-13 | Miele & Cie. Kg | Robotsauger und Verfahren zum Betrieb eines Robotsaugers |
| DE102013223864A1 (de) * | 2013-11-21 | 2015-05-21 | BSH Hausgeräte GmbH | Verfahren zum Betreiben eines Staubsaugers und Staubsauger |
| DE102016206917A1 (de) * | 2016-04-22 | 2017-10-26 | BSH Hausgeräte GmbH | Verfahren zur Leistungsanpassung eines akkumulatorbetriebenen Staubsaugers |
| DE102018209385A1 (de) | 2018-06-13 | 2019-12-19 | Robert Bosch Gmbh | Verfahren zum Bestimmen der Beschaffenheit eines Bodens |
| DE102018209383A1 (de) | 2018-06-13 | 2019-12-19 | Robert Bosch Gmbh | Verfahren zum Bestimmen der Beschaffenheit eines Bodens |
| DE102020205767A1 (de) | 2020-05-07 | 2021-11-11 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Ermitteln mindestens einer Information zu einem Boden |
| DE102021200388B4 (de) * | 2021-01-18 | 2023-09-28 | BSH Hausgeräte GmbH | Einlernfunktion für Staubsauger mit Motordüsen |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0790009B2 (ja) * | 1988-03-07 | 1995-10-04 | 株式会社日立製作所 | 電気掃除機の制御方法 |
| KR920007588B1 (ko) * | 1990-08-29 | 1992-09-08 | 주식회사 금성사 | 자동주행청소기의 카페트 및 계단감지장치 및 방법 |
| US7076830B2 (en) | 2003-01-09 | 2006-07-18 | Royal Appliance Mfg. Co. | Electronically commutated drive system for vacuum cleaner |
| DE102005044617A1 (de) * | 2004-10-01 | 2006-04-13 | Vorwerk & Co. Interholding Gmbh | Verfahren zum Pflegen und/oder Reinigen eines Bodenbelages sowie Bodenbelag und Bodenpflege- und oder Reinigungsgerät hierzu |
| DE102007025389A1 (de) * | 2007-05-30 | 2008-12-04 | Miele & Cie. Kg | Verfahren zum Betreiben eines Staubsaugers und Staubsauger zur Durchführung eines solchen Verfahrens |
-
2007
- 2007-03-07 DE DE102007011381A patent/DE102007011381B3/de not_active Expired - Fee Related
-
2008
- 2008-02-09 DE DE502008001004T patent/DE502008001004D1/de active Active
- 2008-02-09 AT AT08002410T patent/ATE475349T1/de active
- 2008-02-09 EP EP08002410A patent/EP1967115B1/fr active Active
- 2008-02-09 SI SI200830073T patent/SI1967115T1/sl unknown
- 2008-02-09 PL PL08002410T patent/PL1967115T3/pl unknown
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102015104251A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Hartbodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104244A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Bodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104250A1 (de) | 2015-03-20 | 2016-09-22 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines zumindest teilweise mit Teppich belegten Bodens mit einem selbstfahrenden Bodenpflegegerät |
| DE102015104251B4 (de) | 2015-03-20 | 2022-05-19 | Miele & Cie. Kg | Bodenpflegegerät und Verfahren zur Pflege eines Hartbodens mit einem selbstfahrenden Bodenpflegegerät |
| WO2024010712A1 (fr) * | 2022-07-07 | 2024-01-11 | Irobot Corporation | Robot de nettoyage mobile à caractéristiques de nettoyage variables |
Also Published As
| Publication number | Publication date |
|---|---|
| ATE475349T1 (de) | 2010-08-15 |
| EP1967115A3 (fr) | 2009-09-09 |
| SI1967115T1 (sl) | 2010-11-30 |
| PL1967115T3 (pl) | 2010-12-31 |
| DE502008001004D1 (de) | 2010-09-09 |
| EP1967115A2 (fr) | 2008-09-10 |
| DE102007011381B3 (de) | 2008-05-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1967115B1 (fr) | Procédé de reconnaissance d'un revêtement de sol | |
| DE10355651B4 (de) | Verfahren zur Optimierung des Wirkungsgrades eines unter Last betriebenen Motors | |
| DE60103960T2 (de) | Umrichtersteuerschaltung eines motorgetriebenen Lüfters für elektrischen Staubsauger, dieselbe nutzende Antriebssteuerungsschaltung, und diese Antriebssteuerungsschaltung nutzender elektrischer Staubsauger | |
| DE69903883T2 (de) | Reinigungsgerät und Verfahren mit Sanftanlauf | |
| DE102009020842B4 (de) | System zum Steuern der Geschwindigkeit eines Elektromotors in einem Kraftfahrzeug | |
| EP1997412B1 (fr) | Procédé de fonctionnement d'un aspirateur | |
| EP2548491B1 (fr) | Aspirateur et procédé destiné au fonctionnement dýun aspirateur | |
| EP3569124B1 (fr) | Appareil de nettoyage | |
| EP2875767B1 (fr) | Procédé destiné au fonctionnement d'un aspirateur et aspirateur | |
| DE102009018338A1 (de) | Verfahren zum Betrieb eines Vorsatzgeräts für einen Staubsauger und korrespondierendes Vorsatzgerät | |
| DE112006001535T5 (de) | Antriebsvorrichtung eines Öffnungs-/Schließkörpers | |
| EP3479745B1 (fr) | Procédé de fonctionnement d'un entraînement électrique, de préférence d'un ventilateur et / ou d'une brosse d'un aspirateur ou d'un aspirateur robot | |
| DE102012107765B4 (de) | Robotsauger und Verfahren zum Betrieb eines Robotsaugers | |
| WO2013144149A1 (fr) | Procédé de réglage d'un système d'aspiration, procédé servant à faire fonctionner un système d'aspiration et système d'aspiration | |
| EP3235414A1 (fr) | Procédé d'adaptation de puissance d'un aspirateur à batterie | |
| DE102014108479A1 (de) | Verfahren und Einstellvorrichtung zum Einstellen einer Betriebsleistung einer Saugvorrichtung, Handgriff zum Führen einer Saugvorrichtung sowie Saugvorrichtung | |
| EP3821778A1 (fr) | Aspirateur et procédé de fonctionnement d'un aspirateur | |
| EP4212082B1 (fr) | Aspirateur, de préférence aspirateur à main | |
| EP4147624B1 (fr) | Dispositif de nettoyage du sol à détection de sol et procédé | |
| EP4029423B1 (fr) | Fonction d'apprentissage pour aspirateurs pourvus d'injecteurs moteur | |
| EP4327709A1 (fr) | Aspirateur, de préférence aspirateur à main | |
| EP3312986B1 (fr) | Raccourcissement de la phase de calibrage dans un moteur à réluctance | |
| EP4238469B1 (fr) | Appareil de nettoyage à détection de l'état d'une surface et procédé | |
| EP3331157B1 (fr) | Procédé et unité de commande permettant de commander un moteur à réluctance commuté | |
| EP4238470A1 (fr) | Dispositif de nettoyage du sol ciomprenant une commande d'une alimentation en liquide, ainsi que procédé |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| 17P | Request for examination filed |
Effective date: 20090901 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAJ | Information related to disapproval of communication of intention to grant by the applicant or resumption of examination proceedings by the epo deleted |
Free format text: ORIGINAL CODE: EPIDOSDIGR1 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REF | Corresponds to: |
Ref document number: 502008001004 Country of ref document: DE Date of ref document: 20100909 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20100728 |
|
| LTIE | Lt: invalidation of european patent or patent extension |
Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101028 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101028 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101128 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| REG | Reference to a national code |
Ref country code: HU Ref legal event code: AG4A Ref document number: E009333 Country of ref document: HU |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101029 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101108 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: LICE Effective date: 20101021 |
|
| 26N | No opposition filed |
Effective date: 20110429 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502008001004 Country of ref document: DE Effective date: 20110429 |
|
| BERE | Be: lapsed |
Owner name: MIELE & CIE. K.G. Effective date: 20110228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100728 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20120209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120229 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120229 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100728 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 475349 Country of ref document: AT Kind code of ref document: T Effective date: 20130209 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130209 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: HU Payment date: 20150213 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SI Payment date: 20150128 Year of fee payment: 8 Ref country code: SE Payment date: 20150223 Year of fee payment: 8 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: PL Payment date: 20160203 Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160210 Ref country code: SI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160210 |
|
| REG | Reference to a national code |
Ref country code: SI Ref legal event code: KO00 Effective date: 20161013 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160210 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170209 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20220228 Year of fee payment: 15 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230529 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502008001004 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230901 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20240129 Year of fee payment: 17 Ref country code: IT Payment date: 20240222 Year of fee payment: 17 Ref country code: FR Payment date: 20240226 Year of fee payment: 17 |