EP1667931B1 - Engin de levage - Google Patents
Engin de levage Download PDFInfo
- Publication number
- EP1667931B1 EP1667931B1 EP04761917A EP04761917A EP1667931B1 EP 1667931 B1 EP1667931 B1 EP 1667931B1 EP 04761917 A EP04761917 A EP 04761917A EP 04761917 A EP04761917 A EP 04761917A EP 1667931 B1 EP1667931 B1 EP 1667931B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- jib
- appliance according
- foot
- guideway
- lifting appliance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/64—Jibs
- B66C23/68—Jibs foldable or otherwise adjustable in configuration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/62—Constructional features or details
- B66C23/72—Counterweights or supports for balancing lifting couples
- B66C23/74—Counterweights or supports for balancing lifting couples separate from jib
- B66C23/76—Counterweights or supports for balancing lifting couples separate from jib and movable to take account of variations of load or of variations of length of jib
Definitions
- the present invention relates to a steerable and articulated steerable load lifting and handling machine, comprising a pylon with a rotating pivot, an articulated boom comprising an articulating boom, articulated at its first end to the top of the pylon by a spindle horizontal rotation, a dart hinged in rotation by a horizontal hinge pin at the second end of the boom foot, an arrow retainer assembly comprising at least one punch, an arrow holding sling, and a movable counterweight connected to the boom by said restraining sling
- Lifting distributing boom cranes have the advantage over horizontal boom cranes of being able to bring loads to higher heights at comparable tower heights.
- the dead weight effort of an arrow operating in the liftable working mode varies considerably between the positions of the arrow near the horizontal and the raised position close to the vertical. That is why this type of crane is sometimes equipped with a mobile counterweight, the position of which varies according to the angle that the arrow makes with the horizontal.
- the document DE 3438937 describes a luffing jib crane, with a platform at the top of the tower, carrying a counterweight disposed at one end of an oscillating arm.
- the position of the arm is slaved to the angular position of the boom, attached to the other end of the swingarm, so that the counterweight is in the vicinity of the axis of rotation of the pylon when the boom is raised, and deviates in a pendulum motion when the arrow s' tilts horizontally.
- This device does not assist the lifting operation for important lifting angles.
- This type of crane always requires a high torque lifting motor device.
- the document EP 379448 discloses a luffing jib crane according to the preamble of claim 1 comprising a rotating pivot, on which is mounted the boom, a platform carrying the boom lift and load lifting mechanisms and a movable counterweight, attached to the back of the pivot, opposite the arrow.
- the counterweight is mounted rolling on straight members of the platform, which have a slight slope directed towards the axis of the pylon.
- the counterweight is connected by a boom retaining tie, via a deflection pulley, so as to deviate from the pylon when the boom is lowered to the horizontal and to approach the pylon when the boom is raised.
- This device makes it possible to compensate the moment of the dead weight of the boom on the pylon structure, but the lifting requires a mechanism providing a very important torque.
- the document DE 1260733 describes a crane of this type and proposes to reduce or even eliminate the counterweight and to resort to a distribution the end of the dart tip, cooperating with an arrow retaining cable acting on the end of the counter-dart via punches and return pulleys, both of these cables being actuated by winches.
- the implementation of these winches requires engines with very high torque.
- the patent FR 2605619 describes a collapsible hoist that combines the effects of an articulated boom booms with those of a luffing jib crane, giving it versatility.
- this crane because of the design of the articulations of the distributing boom, this crane always has a minimum important range.
- the hook height gain when the tip of the boom is raised remains relatively low, can not exceed an angular amplitude equivalent to 30 ° relative to the horizontal.
- the patent application EP 1057776 of the applicant describes a collapsible lifting gear with directional distributing boom capable of working in articulated mode or in lift mode.
- the boom consists of an arrow leg whose first end is mounted at the top of the pylon, and a dart mounted in articulation on the second end of the jib foot, this jib being delimited by this two-part hinge, know a counter-dart and a dart tip.
- the counter-jib and the portion of the jib foot proximate this hinge are shaped so that the jib foot and the jib can align with the luff-work mode, increasing both the horizontal reach and the height. maximum under hook of the machine.
- This device uses a distribution cable not maintained by guides over a large length when the boom is almost fully deployed, resulting in problems of stability in rotation and distribution under load and headwind.
- the patent application WO 02/04336 the applicant describes folding lifting equipment and tower cranes, with arrows adjustable, articulated, tilting and tilting dispensers.
- the portion of the arrow foot adjacent to the dart and the counter-dart have conjugate shapes allowing the dart tip to align with the boom foot in a work-up mode.
- a system of jacks is arranged at the joint between the jib foot and the jib to ensure the deployment and folding of the jib in horizontal or tilting articulated working mode.
- a mobile counterbalance system enables the crane to be balanced in all working positions: this system comprises in combination a fixed counterweight, for example at the end of the platform of the mechanisms, a main counterbalance counterweight and a second oscillating counterweight corrector. The adjustment of the masses and the positions of the three counterweights makes it possible to balance these cranes optimally in the different working modes that can be tilted, tilted and articulated.
- the object of the present invention is to provide a lifting device of the type defined entry which does not have the disadvantages mentioned above.
- the object of the present invention is in particular to propose a hoist having the same versatility of use character as that described in the document WO 02/04336 while lowering the manufacturing cost, simplifying the implementation and, in addition, reducing the footprint below the platform.
- a counterweight controlled by following a variable slope guide ( ⁇ ), integral with the rotating pivot, supporting said counterweight, arranged opposite the arrow, and whose slope variations ( ⁇ ) are chosen so that the counterweight exerts a set of variable forces on said boom and on the structure of said machine, helping to balance the machine during the movements of deployment / folding of the boom articulated working mode.
- ⁇ variable slope guide
- the present invention relates to a lifting and handling gear articulated directional boom articulated, comprising a pylon with a rotating pivot, an articulated boom comprising an arrow foot, articulated at its first end to the top of the pylon by a horizontal axis of rotation, a dart hinged in rotation by a horizontal hinge pin at the second end of the boom foot, an arrow retainer assembly comprising at least one punch, an arrow retainer and a movable counterweight connected to the boom by said holding sling, and slaved to follow a variable slope guide ( ⁇ ), the guideway being arranged opposite the boom and supporting said counterweight, characterized in that the track guide is rigidly fixed to the pivot pivot, and has in a portion (A) closer to the pylon a slope ( ⁇ A ) lower than the slope ( ⁇ B ) in at minus a portion (B) further from the pylon, the slope ( ⁇ A ) making an angle of 2 ° to 25 ° with the horizontal and the slope ( ⁇ B ) making
- the movable counterweight exerts, simply by means of the one or more boom retaining slings, a traction on this boom, whose intensity is a function of the local slope of the guide channel at the position of the counterweight.
- the mobile counterweight also exerts a bearing force on the guideway, which results in a torque exerted on the structure of the machine integral with the guideway, this torque being a function of the distance between the counterweight and the axis of the pylon. , and also from the local slope to the position of the counterweight.
- the boom restraint assembly of the hoist according to the invention may comprise only one retaining sling. However, it is preferable to use a set of two slings and two punches with their respective return pulleys, the slings being arranged and attached on either side of the arrow, arranged symmetrically with respect to the plane of symmetry thereof. .
- the following description describes, for the sake of didactic simplification, a hoist equipped with a retaining sling. It applies mutatis mutandis to a machine equipped with two slings.
- the guideway according to the invention is arranged opposite the arrow, that is to say seen in vertical projection on a horizontal plane, it extends in the opposite direction of the projection of the arrow, relative to the axis of rotation of the pylon.
- it presents a curved profile, the slope variations being chosen by the manufacturer according to the efforts required by the arrow.
- the guideway may have two or more portions of constant but different slopes, preferably interconnected by a rounded.
- the guideway may have a more complex profile.
- the guideway may have a curvilinear profile, in particular a sigmoidal profile.
- the mobile counterweight is provided with rolling means, such as wheels or rollers, and the guideway may comprise one or more rails on which said rolling means roll.
- rolling means such as wheels or rollers
- the guideway may comprise one or more rails on which said rolling means roll.
- Such a rolling path can be achieved by means of a pair of curved rails, parallel to each other, and the counterweight can consist of a roller carriage, movable on these rails, and ballast elements carried by the said carriage.
- the guide track could also consist of a plurality of rollers on which the mobile counterweight slides, or any equivalent mechanical system.
- these forces correspond to the two components of the vector P, respectively parallel and perpendicular to the guideway, and F ⁇ P . sina VS ⁇ P . x
- ⁇ varies as a function of x, the function ⁇ (x) being determined by the choice of the curvilinear profile of the guideway made by the manufacturer of the crane.
- the distance x of the counterweight relative to the axis of the pylon itself is a decreasing function of the angle that the foot of the arrow makes with the horizontal, because of the connection via the sling retaining, the choice of profile of the guideway according to the invention allows to modulate a return component of the boom, so that all of the restoring and support forces automatically balance the crane during the movements of the crane in operating mode. articulated work, and can assist the mechanism (s) operating the deployment and the folding of the boom, such as cylinders, motors and winches. If the crane operates in lift mode, this return component automatically assists the boom lift mechanism.
- variable return component in the tilting, hinged or tiltable work mode allows the use of mechanical lift devices with lower maximum torque and lower power.
- variable return component of the counterweight also allows the use of less powerful devices, lighter and more economical than a system of hydraulic cylinders, such as electric winches, to operate the boom in articulated work mode for horizontal distribution of loads.
- reaction time of an electric motor system is faster than that of a system based on hydraulic cylinders, which is penalized by the long length of the pipes.
- the use of an electric motor system therefore improves the comfort of the crane operator. Finally, the maintenance is also smaller and easier.
- the counterweight system according to the invention can be used not only for tower cranes, but also for lifting machines with folding towers, self-uprights.
- the counter-jib and the second end of the jib foot may have conjugate prismatic profiles and come into contact with each other when the jib foot and the jib are aligned.
- the second end of the jib foot can have the shape of a fork with two branches and the counter-jib is housed in the space between the two branches.
- the boom foot consists of two parallel beams and the counter-dart is housed in the spacing between the two beams.
- the jib foot may comprise an arrow / jib stop device such as those described in the document WO 02/04336 .
- the rotation of the dart around the second end of the jib foot is performed by means of a system of opposing cables wound and unwound by means of electric winches.
- these winches, a portion of the cables and their return pulleys can be housed in the foot of the arrow. More specifically, the winches are housed at the base of the boom foot to obtain a better balance of the crane by reducing as much as possible the own weight of the winches to the center of the tower. This location improves maintenance because the winches are in the vicinity of the revolving pivot, i.e. the platform.
- the rotation of the dart around the end of the jib foot is carried out by means of a gear system comprising a motor, a pinion and a toothed segment.
- the motor is fixed on the jib foot and drives, via a pinion, a circular toothed segment integral with the dart.
- the Fig. 2 is a schematic view, in profile, of an embodiment of the guideway 1 of the counterweight 100. As an illustration, it has been shown with a ballast 110 in two different positions and with the support arms 108, 109 who wears it, the other elements of the crane having been removed for the sake of simplification.
- the guideway consists of two rails 2, 3 curvilinear and parallel, which are visible both, in section, on the Fig. 5 . However, in all the schematic side views showing the crane, only one rail is shown.
- the crane guideway 1 may have a length of the order of 5 to 20 meters.
- Zone A the closest to the pylon, has a slight slope, making an angle ⁇ A with the horizontal of 2 ° to 25 °.
- the slope increases.
- B on the Fig. 2 the guide path can form an angle ⁇ B of the order of 15 ° to 85 ° with the horizontal.
- C close to the distal end of the guideway with respect to the axis of the mast, the slope decreases again, the path forming an angle ⁇ c of 2 ° to 45 °.
- Fig. 2 we have schematized the components of the forces that a mass of ballast exerts on the other parts of the crane. If the weight vector P is decomposed into its components respectively perpendicular and parallel to the axis of the track, we see that in zone A, the parallel component at way F A is very small.
- the restoring force of the ballast on the restraining sling is weak, but it is sufficient to keep the sling stretched, the carriage tending to return to the pylon.
- the ballast mass is 20 tons and if the slope of ⁇ A is 5 °, the restoring force F A is of the order of 17 kN.
- the ballast essentially exerts a torque on the structure of the crane, which torque, at a distance x A , is about Px A.
- the slope is maximum and, in the embodiment represented on the Fig. 2 , of the order of 50 °.
- the restoring force that the ballast exerts on the boom retaining sling becomes much larger.
- this restoring force corresponds approximately to the component of the weight P parallel to this guideway, ie F b .
- zone C slightly less steep, this restoring force decreases again.
- the slope remains constant and equal to the maximum value reached in zone B, the restoring force would retain in zone C the maximum value of F b reached in the zone B.
- the Fig. 3 represents the restoring force as a function of the distance between counterweight and pylon for three different counterweight systems. In all three systems, the total weight of the counterweight is 20 tonnes.
- Curve (b) represents the restoring force of a pendular counterweight hung on the end of a 12-meter long oscillating arm, which is bulky, moving in the space below the platform.
- Curve (c) represents the return force obtained by means of a guideway according to the invention similar to that of the Fig. 2 , for which the slope is 3 ° near the pylon, then increases to a maximum of 53 ° at a distance of 9 meters, then decreases, the slope being of the order of 30 ° at the end of the way.
- the profile of the curve (c) is determined by the choice of the profile of the guide way, that is to say by the variations of slope between the zones A, B and C represented on the Fig. 2 .
- the Fig. 4 and 5 represent, respectively of profile and face, an embodiment of the counterweight according to the invention.
- the carriage is generally designated 101.
- the chassis of the carriage consists of four longitudinal beams, two outer beams 102 and two inner beams 103, connected by four transverse beams 104.
- Each beam 102, 103 carries two rolling devices. with rollers 105 which roll on the two curvilinear rails 2 and 3 constituting the raceway.
- the outer longitudinal beams 102 each carry three substantially vertical support beams, namely an upper beam 106 and two lower beams 107, constituting three points of support.
- Each longitudinal beam 102 also carries two support arms 108, 109.
- These support arms are preferably mounted inclined to eliminate the play between ballast elements, which are supported against each other, and against the support points. .
- the support arms, and the corresponding fastening means of the ballast elements are arranged so that the level of the center of gravity of the counterweight is close to, and preferably substantially coincides with the level of the raceway at the location where is the trolley, to avoid swaying movements of the crane.
- the support arms can be mounted on joints to fold them, in order to reduce the size of the carriage during transport.
- Each pair of unfolded arms 108, 109 receives one or more weight (s) of ballast 110.
- these ballast masses may consist of concrete plates provided with two holes for hanging them on the support arms 108 and 109.
- the holes 111 may be made in the form of two squares rotated angularly by 90 ° relative to each other. at the other and spaced apart from one another so that the support arms 108 and 109 are placed in the corners as shown in FIG. Fig. 2 .
- this arrangement allows both an easy placement of the weights on the support arms, the dimensions of the holes 111 being significantly greater than the diameter of the support arms 108 and 109, and on the other hand avoids a tilting masses and corresponding shocks when the movable carriage moves between the zone A and the areas B and C of the raceway.
- the establishment of the weights on the carriage is completed by the establishment of a set of bars 113 and safety cables 112 between the support arm and support beams of the carriage.
- ballast 110 offer to the lateral wind a large surface.
- the action of the wind on it therefore generates a torque that partially compensates for the torque that the wind exerts on the boom.
- This arrangement and this conformation of the ballast plates thus assists the horizontal rotation of the rotating part above the pivot, that is to say the distribution of the charges.
- the two curvilinear rails 2 and 3 are connected by a set of transverse beams 4 thus constituting a kind of platform which can receive one or more winches 17, punches or tie rods 6.
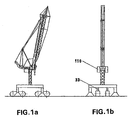
- Fig. 1a and 1b show an articulated boom crane, with the boom raised to the maximum and the dart folded against the boom foot, on a rolling chassis.
- the ballast masses come very close to the pylon, framing it on both sides, as shown in the diagram.
- Fig. 1b In this position, the ballast masses on the one hand and the mass of the boom on the other hand exert relatively low stresses on the tower and the rolling chassis of the crane, so that the displacement of the standing crane is possible on the yard, by means of a chase, without there being need to disassemble the crane to move it.
- Jacks 33 can raise and adjust the level of the crane during such a displacement.
- the Fig. 6a and 6b show the operation of the counterweight on a hoist whose boom operates in working mode.
- the Fig. 6a shows the machine, the arrow 10 is almost horizontal, in maximum range position.
- the counterweight 100 represented in a simplified manner by a square ballast and a set of rollers, rolls on the guideway 1 and is connected to the boom only by the sling (s) 11, so that its displacement is enslaved to the displacement of the arrow simply and only by this (these) sling (s) 11.
- the counterweight 100 is in the distal zone of the lane 1 relative to the axis of the tower.
- the arrow 10 is raised in the minimum range position.
- the boom retention sling 11 is fixed at its first end to the counterweight 100. It passes over a deflection pulley 9 arranged at the distal end of the guideway and a second deflection pulley 8 arranged at the top of the punch. 7.
- the other end of the retaining sling 11 is fixed at 12 to the arrow, at the same level as the bridge 13.
- the bridge 13 serves as a point of attachment to the lifting device.
- the lifting device may consist of several parts, namely a lifting tie 14, connecting the lifting bridge to a pulley or a block 16, and a lifting cable 15, which can make several strands of muffle.
- the lifting cable 15 is connected to a winch of lift 17 whose coil is arranged on the platform secured to the guideway.
- the boom retaining sling 11 cooperates with the lifting engine device to raise the boom.
- the counterweight system according to the invention therefore makes it possible to reduce the maximum nominal torque of the lifting device. If it is desired to obtain a return component F assisting the lifting device to the maximum in positions close to that of the Fig. 6a , the guideway may have its steepest slope in its distal portion.
- arrow 10 shown on the Fig. 6a and 6b can be a rigid boom or an articulated boom like that of the Fig. 7c .
- the Fig. 7a, 7b and 7c illustrate the operation of an articulated boom operating in horizontal articulated distribution mode.
- the Fig. 7a similar to Fig. 1a , shows the arrow in the position of minimum range, dart 18 folded against foot of arrow 19.
- the Fig. 7c shows the arrow 10 in a position similar to that of the Fig. 6a in the maximum range position, the jib foot and the jib being aligned.
- the Fig. 7b shows the arrow in an intermediate deployment position.
- the skilled person will note in particular that in the position illustrated by the Fig. 7b , the counterweight 100 is about halfway and the traction component on the retaining sling 11 of the boom is important.
- the arrow lift tie 14 attached to the bridge 13 passes on the end 21 of the counter-dart 20 which returns it.
- the hinge 32 formed by a horizontal axis of rotation between the foot of the boom 19 and the dart 18 delimits the latter between dart tip 22 and against-dart 20. It is at this level that is attached in 12 the sling 11.
- the rotation of the dart about the hinge axis 32 is achieved by means of two opposing cables 23 and 24.
- the attachment point of the cable 23 is located at the end of the counter -flash 20 to obtain the largest lever arm relative to the hinge 32, to reduce the forces in the cable 23 and the required power of the electric winch 25 which actuates.
- the point of attachment of the cable 24 on the dart 22 is situated approximately at the same distance as the cable 23 with respect to the hinge 32.
- a pulley 29 of the cables 23, 24 is arranged in the foot of the arrow, in an area close to the articulation 32 between the foot of the arrow and the dart, as illustrated by FIG. figure 7b .
- the winding winches 25, 26 of the cables 23 and 24 are arranged in the jib foot near the articulation 27 of the first end of the jib foot at the top of the tower in order to obtain a better balance of the crane. bringing as much as possible the dead weight of the various elements of the winches 25 and 26 towards the center of the pylon. This location also improves maintenance because the winches are close to the swivel.
- the attachment point 12 of the sling 11, located on the dart 18, describes an arc around the hinge axis 32 to optimize the movement of the counterweight to improve the balance of the crane.
- the operation of the horizontal distribution from the minimum range ( Fig. 7a ) to the maximum range, Fig. 7c , in articulated work mode is illustrated in more detail by the Fig. 8a, 8b, 8c, 8d and 8th .
- the Fig. 8a shows the area of the arrow surrounding the 32 foot joint of arrow / dart in the position of the Fig. 7a .
- the boom retaining slings (s) pass (s) slightly below and to the right of the articulation 32 foot of arrow / dart; the lifting cable 15 and the lifting lever 14 boom run over the end 21 of the counter-dart and are a little to the left of the hinge 32 between the jib and arrow.
- the cables 23 and 24 have antagonistic effects. From this position, the upper cable 23 is controlled by the crane operator and the lower cable 24 is unwound. The upper cable 23 is deflected by the upper rod 30.
- the upper cable 23 always pulls on the counter-dart, in order to continue the deployment movement, but the upper rod 30 no longer deflects the upper cable 23.
- the lower cable 24 is always carried by the upper cable.
- the upper cable 23 always pulls on the counter-dart, to continue to deploy the boom, and the lower cable 24 is always carried by the upper cable. It will be noted that the lower cable 24 comes into contact with the lower rod 31 and that the retaining sling 11 has passed the hinge 32 between the jib and the jib.
- the lifting tie 14 In the position illustrated by the Fig. 8th the lifting tie 14 is no longer in contact with the end 21 of the counter-dart.
- the lower cane 31 increases the traction angle of the lower cable 24 in order to reduce the efforts of this and to ensure the stability of the elements around the joint 32.
- the return force contribution F of the boom retaining sling 11 decreases in favor of the torque C.
- the distal zone of the guide lane 1 indicated as zone C on the Fig. 2 may have a lower slope than the slope of zone B.
- the Fig. 9a and 9b illustrate the tilting jib work mode of the articulated boom previously described in relation to the groups of Fig. 7 and 8 .
- the boom foot 19 does not move, it bears against an abutment device 33.
- Such abutment devices are known in the state of the art.
- the mobile counterweight 100 is located in both positions in a low slope area of the raceway, near the pylon. However, because of the non-zero distance between the attachment point 12 of the boom retaining sling and the hinge 32 between the jib and dart, this attachment point 12 describes an arc around the articulation 32 of the arrow, driving the counterweight in a limited displacement.
- the resulting momentum variations of the counterweight to the pylon balance the variations in the moment of the weight of the boom due to the rotation of the dart.
- the rotation of the dart about the hinge 32 with the jib foot is provided by the opposing cable systems 24 and 23 in the same manner as explained above in connection with the group of Fig. 8 .
- the stability of the end of the boom is provided by a electromechanical brake with no current installed on the motors of the cables 23 and 24.
- the set of antagonistic cables 24 and 23 with their winding and unwinding winches 25, 26 arranged in the jib foot is replaced by a gear system 200, consisting of a motor 201, a gear 202 and a toothed segment 203, arranged at the hinge 232 between the jib 204 and the jib 205.
- the electric motor 201 is fixed on the jib foot, it drives a pinion 202 which itself meshes with a circular toothed segment 203 integral with the dart, to ensure the rotation of the dart around the hinge 232 between the foot of the arrow and the dart.
- the arrangement and function of the boom retainers 11 and the lift tie 14 are the same as those of the embodiments described above.
- the Fig. 11 schematically illustrates an exemplary embodiment of tower crane according to the invention.
- the base frame has an impregnation of 5 x 5 meters and carries a basic weight of 46 tons.
- the base frame is surmounted by a tower having a cabin height of 31 meters and a rotating pivot. This one carries the platform, the cabin and the arrow as well as the guide way on which the mobile ballast circulates.
- the total weight of the idling crane in service is 111.6 tons.
- the guiding track integral with the rotating pivot at the top of the pylon, extends from the pylon up to a distance of 12 meters from it. It consists of a pair of rails connected by spacers. Each rail comprises a first straight portion of slope 5 °, extending from the pivot pivot to a distance of 6 meters, a second rectilinear portion of slope 29 °, extending from a distance of 6 meters up to at a distance of 8 meters from the pylon, and a third rectilinear portion of slope 43 °, corresponding to the last two meters of the track. Between the first and second rectilinear portions on the one hand and the second and third rectilinear portions on the other hand are located two intermediate portions curved, forming the rounded rails, which are therefore generally curvilinear.
- the guideway which is also the platform, carries the boom lifting winch which has a power of 22 kW.
- the guideway is surmounted by a set of punches and tie rods carrying the pulleys. The whole stands at a height of about 41.6 meters.
- the boom foot near its articulation with the rotating pivot of the tower, the boom deployment / folding winches in articulated working mode with a power of 7.5 kW and the hoist winch of the load of a power of 45 kW.
- the corresponding return pulleys are also housed in the foot of the arrow near the joint with the dart.
- the operating mode of the articulated boom has been described above in relation to the Fig. 6a to 8e .
- the crane can deliver a maximum load of 12 tons at reduced speed, or a load of 10 tons at normal speed, and this in an area from 2 to 20 meters from the foot of the pylon.
- the distributable load decreases at a greater distance from the foot of the pylon.
- the maximum load is 5.6 tonnes at reduced speed and 4.7 tonnes at normal speed at the maximum working range, that is to say 47 meters.
- the speed of distribution can vary from 0 to 60 meters per minute.
- the maximum distributable load is 12 tonnes when the range is between 5 and 20 meters.
- the maximum load is reduced to 5.6 tons at a maximum range of 47 meters.
- the maximum height under hook in lift mode is 80 meters.
- the movement speed in lift mode can vary from 0 to 30 meters per minute.
- the crane When the crane is dismantled, it can be transported in parts by means of five trailers of lengths between 6 and 12 meters, each of the trailers carrying a set of parts from 19.5 to 25 tons.
- the boom lift winch can be removed and the lift block is replaced by two tie rods. This reduces the sale price of the crane and the number of parts.
Description
- La présente invention concerne un engin de levage et de manutention de charges à flèche distributrice orientable et articulée, comprenant un pylône avec un pivot tournant, une flèche articulée comprenant un pied de flèche, articulé à sa première extrémité au sommet du pylône par un axe de rotation horizontal, une fléchette articulée en rotation par un axe d'articulation horizontal à la deuxième extrémité du pied de flèche, un ensemble de retenue de flèche comprenant au moins un poinçon, une élingue de retenue de flèche et un contrepoids mobile relié à la flèche par ladite élingue de retenue
- Pour permettre la manutention de charges sur des chantiers de construction, on utilise habituellement des grues à flèche distributrice horizontale orientable, sur laquelle coulisse un chariot servant de guide à des moyens de suspension des charges.
- Dans certaines circonstances, par exemple lorsque les chantiers sont encombrés ou lorsque la législation interdit le survol de parcelles jouxtant le chantier, on leur préfère des grues à flèche distributrice relevable et orientable. Les grues à flèche distributrice relevable ont l'avantage, par rapport aux grues à flèche horizontale, de pouvoir amener des charges à de plus grandes hauteurs, à hauteurs de pylônes comparables. L'effort du poids mort d'une flèche opérant en mode de travail relevable varie considérablement entre les positions de la flèche proches de l'horizontale et la position relevée proche de la verticale. C'est pourquoi ce type de grue est quelquefois muni d'un contrepoids mobile, dont la position varie en fonction de l'angle que fait la flèche avec l'horizontale.
- Le document
DE 3438937 décrit une grue à flèche relevable, avec une plate-forme au sommet du pylône, portant un contrepoids disposé à une extrémité d'un bras oscillant. La position du bras est asservie à la position angulaire de la flèche, fixée à l'autre extrémité du bras oscillant, de telle sorte que le contrepoids se trouve à proximité de l'axe de rotation du pylône lorsque la flèche est relevée, et s'en écarte en un mouvement pendulaire lorsque la flèche s'incline vers l'horizontale. Ce dispositif assiste peu l'opération de relevage pour des angles de relevages importants. Ce type de grue nécessite toujours un dispositif moteur de relevage à couple élevé. - Le document
EP 379448 - On peut également recourir à des grues de type portuaire, à flèche distributrice horizontale orientable, articulée, effectuant un déplacement de la charge, éloignant respectivement rapprochant celle-ci de l'axe de pivotement de la grue par déploiement, respectivement reploiement de la flèche. Le moment du poids propre d'une flèche de ce type varie considérablement entre la position déployée de la flèche et la position repliée vers le pylône. Il est difficile d'équilibrer ces variations d'effort par un seul contrepoids mobile.
- Le document
DE 1260733 décrit une grue de ce type et propose de réduire, voire de supprimer le contrepoids et de recourir à un câble de rappel de distribution, fixé à l'extrémité de la pointe de fléchette, coopérant avec un câble de retenue de flèche agissant sur l'extrémité de la contre-fléchette, via des poinçons et des poulies de renvoi, ces deux câbles étant actionnés par des treuils. La mise en oeuvre de ces treuils nécessite des moteurs à très fort couple. - Le brevet
FR 2605619 - La demande de brevet
EP 1057776 du déposant décrit un engin de levage repliable à flèche distributrice orientable capable de travailler en mode articulé ou en mode relevable. La flèche est constituée d'un pied de flèche dont la première extrémité est montée au sommet du pylône, et d'une fléchette montée en articulation sur la deuxième extrémité du pied de flèche, cette fléchette étant délimitée par cette articulation en deux parties, à savoir une contre-fléchette et une pointe de fléchette. La contre-fléchette et la partie du pied de flèche proche de cette articulation sont conformées de telle sorte que le pied de flèche et la fléchette puissent venir en alignement en mode de travail relevable, ce qui augmente à la fois la portée horizontale et la hauteur maximale sous crochet de l'engin. Ce dispositif fait appel à un câble de distribution non maintenu par des guides sur une grande longueur lorsque la flèche est presque entièrement déployée, d'où des problèmes de stabilité en rotation et en distribution sous charge et vent de face. - La demande de brevet
WO 02/04336 - Toutefois, le fonctionnement d'un tel système de contrepoids peut se révéler délicat à régler. La longueur du bras du contrepoids pendulaire entraîne un encombrement important en-dessous de la plate-forme. Par ailleurs, le mécanisme de l'articulation de la flèche, constitué de vérins, est relativement onéreux, sa commande manque de précision et son poids contribue à alourdir l'ensemble de la flèche.
- Le but de la présente invention est de proposer un engin de levage du type défini d'entrée qui ne présente pas les inconvénients mentionnés ci-dessus.
- Le but de la présente invention est en particulier de proposer un engin de levage présentant le même caractère de polyvalence d'utilisation que celui décrit dans le document
WO 02/04336 - Ces buts sont atteints grâce à un contrepoids asservi à suivre une voie de guidage de pente (α) variable, solidaire du pivot tournant, supportant ledit contrepoids, agencée à l'opposé de la flèche, et dont les variations de pente (α) sont choisies de sorte que le contrepoids exerce un ensemble de forces variables sur ladite flèche et sur la structure dudit engin, contribuant à équilibrer l'engin au cours des mouvements de déploiement/reploiement de la flèche en mode de travail articulé.
- A cet effet, la présente invention concerne un engin de levage et de manutention de charges à flèche distributrice orientable et articulée, comprenant un pylône avec un pivot tournant, une flèche articulée comprenant un pied de flèche, articulé à sa première extrémité au sommet du pylône par un axe de rotation horizontal, une fléchette articulée en rotation par un axe d'articulation horizontal à la deuxième extrémité du pied de flèche, un ensemble de retenue de flèche comprenant au moins un poinçon, une élingue de retenue de flèche et un contrepoids mobile, relié à la flèche par ladite élingue de retenue, et asservi à suivre une voie de guidage de pente (α) variable, la voie de guidage étant agencée à l'opposé de la flèche et supportant ledit contrepoids, caractérisé en ce que la voie de guidage est rigidement fixé au pivot tournant, et présente dans une portion (A) plus proche du pylône une pente (αA) plus faible que la pente (αB) dans au moins une portion (B) plus éloignée du pylône, la pente (αA) faisant un angle de 2° à 25° avec l'horizontale et la pente (αB) faisant un angle de l'ordre de 15° à 85° avec l'horizontale, et en ce que les variations de pente (α) sont choisies de sorte que le contrepoids exerce un ensemble de forces variables sur ladite flèche et sur la structure dudit engin, contribuant à équilibrer l'engin au cours des mouvements de déploiement/reploiement de la flèche en mode de travail articulé.
- Le contrepoids mobile exerce, via simplement la ou les élingues de retenue de flèche une traction sur cette flèche, dont l'intensité est fonction de la pente locale de la voie de guidage à la position du contrepoids. Le contrepoids mobile exerce également une force d'appui sur la voie de guidage, qui se traduit par un couple exercé sur la structure de l'engin solidaire de la voie de guidage, ce couple étant fonction de la distance entre contrepoids et axe du pylône, et également de la pente locale à la position du contrepoids.
- L'ensemble de retenue de flèche de l'engin de levage selon l'invention peut ne comporter qu'une seule élingue de retenue. Il est cependant préférable d'employer un ensemble de deux élingues et deux poinçons avec leurs poulies de renvoi respectives, les élingues étant agencées et attachées de part et d'autre de la flèche, disposées symétriquement par rapport au plan de symétrie de celle-ci. L'exposé ci-dessous décrit, par souci de simplification didactique, un engin de levage équipé d'une élingue de retenue. Il s'applique mutatis mutandis à un engin équipé de deux élingues.
- La voie de guidage selon l'invention est agencée à l'opposé de la flèche, c'est-à-dire que vue en projection verticale sur un plan horizontal, elle s'étend dans la direction opposée de la projection de la flèche, par rapport à l'axe de rotation du pylône. D'autre part, en vue latérale, elle présente un profil courbe, les variations de pente étant choisies par le constructeur en fonction des efforts demandés par la flèche.
- La voie de guidage peut présenter deux ou plusieurs portions de pentes constantes mais différentes, de préférence reliées entre elles par un arrondi. La voie de guidage peut présenter un profil plus complexe. La voie de guidage peut présenter un profil curviligne, en particulier un profil sigmoïdal.
- De préférence, pour minimiser les forces de frottement, le contrepoids mobile est muni de moyens de roulement, tels que roues ou galets, et la voie de guidage peut comporter un ou plusieurs rails sur lesquels roulent lesdits moyens de roulement. Une telle voie de roulement peut être réalisée au moyen d'une paire de rails courbes, parallèles entre eux, et le contrepoids peut être constitué d'un chariot à galets, mobile sur ces rails, et d'éléments de lest portés par le dit chariot.
- La voie de guidage pourrait également être constituée d'une pluralité de rouleaux sur lesquels glisse le contrepoids mobile, ou de tout système mécanique équivalent.
- Un contrepoids de poids P placé sur la voie de guidage, lorsqu'il est situé à une distance x de l'axe du pylône, en une zone où la voie de guidage présente un angle α avec l'horizontale, exerce d'une part une force de rappel F sur la flèche via l'élingue de retenue et les poulies de renvoi, et d'autre part une force d'appui sur la voie de guidage qui génère un couple C s'exerçant sur les structures de la grue, s'opposant au couple exercé par le poids propre de la flèche et la charge de levage sur le pylône.
- En première approximation, ces forces correspondent aux deux composantes du vecteur P, respectivement parallèle et perpendiculaire à la voie de guidage, et


- Or selon l'invention, α varie en fonction de x, la fonction α(x) étant déterminée par le choix du profil curviligne de la voie de guidage fait par le constructeur de la grue. La distance x du contrepoids par rapport à l'axe du pylône étant elle-même une fonction décroissante de l'angle que fait le pied de flèche avec l'horizontale, du fait de la liaison via l'élingue de retenue, le choix du profil de la voie de guidage selon l'invention permet de moduler une composante de rappel de la flèche, de telle sorte que l'ensemble des forces de rappel et d'appui équilibre automatiquement la grue au cours des mouvements de la grue en mode de travail articulé, et peut assister le ou les mécanisme(s) opérant le déploiement et le reploiement de la flèche, tels que vérins, moteurs et treuils. Si la grue opère en mode relevable, cette composante de rappel assiste automatiquement le mécanisme de relevage de la flèche.
- Les relations (I) et (II) ne sont données qu'à titre illustratif du principe de l'invention. Elles ne tiennent pas compte de facteurs correctifs liés aux positions en élévation du centre de gravité du contrepoids, des points d'attache de la/des élingue(s) de retenue et des poulies de renvoi. Ces équations ne sauraient donc définir des limitations de l'étendue de la protection recherchée.
- L'utilisation de cette composante de rappel variable en mode de travail relevable, articulé ou à fléchette inclinable permet l'emploi de dispositifs mécaniques de relevage offrant un couple maximal et une puissance maximale moins élevés.
- L'utilisation de cette composante de rappel variable du contrepoids permet également l'emploi de dispositifs moins puissants, plus légers et plus économiques qu'un système de vérins hydrauliques, par exemple des treuils électriques, pour faire opérer la flèche en mode de travail articulé pour la distribution horizontale des charges.
- Le temps de réaction d'un système à moteurs électriques est plus rapide que celui d'un système à base de vérins hydrauliques, qui est pénalisé par la grande longueur des conduites. L'utilisation d'un système à moteur électrique améliore donc le confort du grutier. Enfin, l'entretien est également plus réduit et plus aisé.
- Le système de contrepoids selon l'invention peut s'appliquer
- à des engins de levage à flèche distributrice articulée, ou
- à des engins à flèche relevable, ou
- à des engins à flèche articulée et relevable, ou encore
- à des engins à flèche articulée, relevable et fléchette inclinable.
- Le système de contrepoids selon l'invention peut être utilisé non seulement pour des grues-tour, mais aussi pour des engins de levage à pylônes repliables, auto-montants.
- L'architecture générale de tels engins de levage, et notamment des structures et formes avantageuses de pieds de flèche et de fléchettes sont décrites dans le document
WO 02/04336 WO 02/04336 - Selon un mode de réalisation préféré, la rotation de la fléchette autour de la deuxième extrémité du pied de flèche est effectuée au moyen d'un système de câbles antagonistes enroulés et déroulés au moyen de treuils électriques. Selon un mode d'exécution particulier, ces treuils, une partie des câbles et leurs poulies de renvoi peuvent être logés dans le pied de flèche. Plus précisément, les treuils sont logés à la base du pied de flèche pour obtenir un meilleur équilibre de la grue en ramenant le plus possible les poids propres des treuils vers le centre du pylône. Cet emplacement améliore la maintenance du fait que les treuils se trouvent à proximité du pivot tournant, c'est-à-dire de la plate-forme.
- Selon un autre mode de réalisation préféré, la rotation de la fléchette autour de l'extrémité du pied de flèche est réalisée au moyen d'un système d'engrenage comprenant un moteur, un pignon et un segment denté. Selon un mode d'exécution particulier, le moteur est fixé sur le pied de flèche et entraîne, via un pignon, un segment denté circulaire solidaire de la fléchette.
- D'autres caractéristiques et avantages de l'invention apparaîtront à l'homme du métier de la description ci-dessous de modes d'exécution particuliers en relation avec le dessin, dans lequel :
- la
fig. 1 présente deux vues schématiques, de profil en 1a et de face en 1b, d'une grue de chantier selon l'invention, montée sur un chenillard, flèche repliée et relevée, la fléchette étant rabattue contre le pied de flèche; - la
fig. 2 est une vue schématique de profil, d'une voie de guidage de contrepoids; - la
fig. 3 compare les variations de la force de rappel d'un contrepoids selon l'invention avec celles de contrepoids de l'art antérieur; - la
fig. 4 est une vue de profil d'un contrepoids; - la
fig. 5 est une vue de face d'un contrepoids; - les
fig. 6a et 6b sont deux vues schématiques, de profil, d'une grue à flèche relevable; - les
fig. 7a, 7b et 7c sont trois vues schématiques, de profil, d'une grue à flèche articulée; - le groupe de
fig. 8 , c'est-à-dire 8a, 8b, 8c, 8d et 8e, sont des vues de détail illustrant le fonctionnement de la grue desfig. 7a, 7b et 7c ; - les
fig. 9a, 9b sont deux vues schématiques de profil d'une grue opérant en mode de travail à fléchette inclinable; - les
fig. 10a 10b et 10c sont trois vues schématiques illustrant un autre mode d'exécution de grue à flèche articulée; - la
fig. 11 est une vue d'ensemble, de profil, d'un exemple de réalisation de grue-tour. - La
fig. 2 est une vue schématique, de profil, d'un mode d'exécution de la voie de guidage 1 du contrepoids 100. A titre illustratif, elle a été représentée avec un lest 110 dans deux positions différentes et avec les bras de support 108, 109 qui le portent, les autres éléments de la grue ayant été supprimés par souci de simplification. La voie de guidage est constituée de deux rails 2, 3 curvilignes et parallèles, qui sont visibles tous deux, en coupe, sur lafig. 5 . Toutefois, dans toutes les vues schématiques latérales montrant la grue, un seul rail est représenté. - Selon le gabarit d'ensemble de la grue la voie de guidage 1 peut avoir une longueur de l'ordre de 5 à 20 mètres. La zone A, la plus proche du pylône, présente une pente faible, faisant un angle αA avec l'horizontale de 2° à 25°. En s'éloignant de la grue, la pente augmente. Dans la zone indiquée par B sur la
fig. 2 , la voie de guidage peut former un angle αB de l'ordre de 15° à 85° avec l'horizontale. Enfin, dans la zone indiquée par C, proche de l'extrémité distale de la voie de guidage par rapport à l'axe du pylône, la pente diminue à nouveau, la voie formant un angle αc de 2° à 45°. - Sur la
fig. 2 , on a schématisé les composantes des forces qu'une masse de lest exerce sur les autres parties de la grue. Si l'on décompose le vecteur poids P en ses composantes respectivement perpendiculaire et parallèle à l'axe de la voie, on constate que dans la zone A, la composante parallèle à la voie FA est très petite. La force de rappel du lest sur l'élingue de retenue est faible, mais suffit à maintenir cette élingue tendue, le chariot tendant à revenir vers le pylône. A titre d'exemple, si la masse de lest est de 20 tonnes et si la pente de αA est de 5°, la force de rappel FA est de l'ordre de 17 kN. Le lest exerce essentiellement un couple sur la structure de la grue, couple qui, à une distance xA, vaut environ P.xA. - Dans la zone indiquée par B, la pente est maximale et, dans le mode d'exécution représenté sur la
fig. 2 , de l'ordre de 50°. La force de rappel que le lest exerce sur l'élingue de retenue de flèche devient beaucoup plus importante. Sous réserve de la position du point d'attache de l'élingue de retenue au contrepoids et de la position de la poulie de renvoi, qui est située à proximité de l'extrémité distale de la voie de guidage, mais qui peut être agencée sur cette dernière, ou au-dessus, ou au-dessous, cette force de rappel correspond approximativement à la composante du poids P parallèle à cette voie de guidage, soit Fb. - Dans la zone C, légèrement moins pentue, cette force de rappel diminue à nouveau. L'homme du métier observera sans peine que si dans la zone C, la pente restait constante et égale à la valeur maximale atteinte dans la zone B, la force de rappel conserverait dans la zone C la valeur maximale de Fb atteinte dans la zone B.
- La
fig. 3 représente la force de rappel en fonction de la distance entre contrepoids et pylône pour trois systèmes de contrepoids différents. Dans les trois systèmes, la masse totale du contrepoids est de 20 tonnes. La courbe (a) représente la force de rappel pour une voie de guidage à profil rectiligne, correspondant par exemple à celui décrit dansEP 0379448 , avec α = 5°. La courbe (b) représente la force de rappel d'un contrepoids pendulaire, accroché à l'extrémité d'un bras oscillant de 12 mètres de long, qui est encombrant, le déplacement s'effectuant dans l'espace en-dessous de la plate-forme. - La courbe (c) représente la force de rappel obtenue au moyen d'une voie de guidage selon l'invention similaire à celle de la
fig. 2 , pour laquelle la pente vaut 3° à proximité du pylône, augmente ensuite jusqu'à un maximum de 53° à une distance de 9 mètres, pour rediminuer ensuite, la pente étant de l'ordre de 30° à l'extrémité de la voie. Le profil de la courbe (c) est déterminé par le choix du profil de la voie de guidage c'est-à-dire par les variations de pente entre les zones A, B et C représentées sur lafig. 2 . - Les
fig. 4 et 5 représentent, respectivement de profil et de face, un mode d'exécution du contrepoids selon l'invention. Dans ces figures, le chariot est généralement désigné par 101. Le châssis du chariot est constitué de quatre poutres longitudinales, deux poutres extérieures 102 et deux poutres intérieures 103, reliées par quatre poutres transversales 104. Chaque poutre 102, 103 porte deux dispositifs de roulement à galets 105 qui roulent sur les deux rails curvilignes 2 et 3 constituant la voie de roulement. Les poutres longitudinales extérieures 102 portent chacune trois poutres d'appui sensiblement verticales, à savoir une poutre supérieure 106 et deux poutres inférieures 107, constituant trois points d'appui. Chaque poutre longitudinale 102 porte également deux bras-support 108, 109. Ces bras-support sont de préférence montés inclinés pour supprimer les jeux entre éléments de lest, qui viennent s'appuyer les uns contre les autres, et contre les points d'appui. Les bras-support, et les moyens de fixation correspondants des éléments de lest sont agencés de telle sorte que le niveau du centre de gravité du contrepoids soit proche du, et de préférence coïncide sensiblement avec le niveau de la voie de roulement à l'endroit où se trouve le chariot, pour éviter des balancements lors des mouvements de la grue. - Selon une variante d'exécution, les bras-support peuvent être montés sur des articulations permettant de les replier, en vue de diminuer l'encombrement du chariot pendant le transport. Chaque paire de bras dépliés 108, 109 reçoit une ou plusieurs masse(s) de lest 110. Comme le montrent les
fig. 2 et5 , ces masses de lest peuvent être constituées de plaques de béton munies de deux trous permettant de les accrocher sur les bras-support 108 et 109. Les trous 111 peuvent être réalisés sous forme de deux carrés tournés angulairement de 90° l'un par rapport à l'autre et espacés l'un de l'autre de telle sorte que les bras-support 108 et 109 viennent se placer dans les angles comme le montre lafig. 2 . L'homme du métier comprendra aisément que cette disposition permet à la fois un placement facile des lests sur les bras-support, les dimensions des trous 111 étant nettement supérieures au diamètre des bras-support 108 et 109, et d'autre part évite un basculement des masses et les chocs correspondants lorsque le chariot mobile se déplace entre la zone A et les zones B et C de la voie de roulement. La mise en place des lests sur le chariot est parachevée par la mise en place d'un ensemble de barres 113 et câbles de sécurité 112 entre bras-support et poutres d'appui du chariot. - Les plaques de lest 110 offrent au vent latéral une surface importante. L'action du vent sur celle-ci génère donc un couple qui compense partiellement le couple que le vent exerce sur la flèche. Cet agencement et cette conformation des plaques de lest assiste donc la rotation horizontale de la partie tournante au-dessus du pivot, c'est à dire la distribution des charges.
- L'homme du métier constatera également sur la
fig. 5 que les deux rails curvilignes 2 et 3 sont reliés par un ensemble de poutres transversales 4 constituant ainsi une sorte de plate-forme qui peut recevoir un ou plusieurs treuils 17, poinçons ou tirants de poinçons 6. - Les
fig. 1a et 1b montrent une grue à flèche articulée, pied de flèche relevé au maximum et fléchette repliée contre le pied de flèche, sur un châssis roulant. Dans la position où le pied de flèche est entièrement relevé, les masses de lest viennent très près du pylône, en l'encadrant de part et d'autre, comme le montre lafig. 1b . Dans cette position, les masses de lest d'une part et la masse de la flèche d'autre part exercent des contraintes relativement faibles sur la tour et le châssis roulant de la grue, de sorte que le déplacement de la grue debout est possible sur le chantier, au moyen d'un chenillard, sans qu'il y ait besoin de démonter la grue pour la déplacer. Des vérins 33 peuvent permettre de soulever et de régler le niveau de la grue lors d'un tel déplacement. - Les
fig. 6a et 6b montrent le fonctionnement du contrepoids sur un engin de levage dont la flèche fonctionne en mode de travail relevable. Lafig. 6a montre l'engin, la flèche 10 étant presque à l'horizontale, en position de portée maximale. Le contrepoids 100, représenté de manière simplifiée par un lest carré et un jeu de galets, roule sur la voie de guidage 1 et n'est relié à la flèche que par la(les) élingue(s) de retenue 11, de sorte que son déplacement est asservi au déplacement de la flèche simplement et seulement par cette(ces) élingue(s) 11. Sur lafig. 6a , le contrepoids 100 se trouve dans la zone distale de la voie 1 par rapport à l'axe de la tour. Sur lafig. 6b , la flèche 10 est relevée en position de portée minimum. L'élingue 11 de retenue de flèche est fixée à sa première extrémité au contrepoids 100. Elle passe sur une poulie de renvoi 9 agencée à l'extrémité distale de la voie de guidage et sur une deuxième poulie de renvoi 8 agencée au sommet du poinçon 7. L'autre extrémité de l'élingue de retenue 11 est fixée en 12 à la flèche, au même niveau que le chevalet 13. Le chevalet 13 sert de point d'attache au dispositif de relevage. Le dispositif de relevage peut être constitué de plusieurs parties, à savoir un tirant de relevage 14, reliant le chevalet de relevage à une poulie ou un moufle 16, et un câble de relevage 15, qui peut faire plusieurs brins de moufle. Le câble de relevage 15 est relié à un treuil de relevage 17 dont la bobine est agencée sur la plate-forme solidaire de la voie de guidage. - L'élingue de retenue 11 de flèche coopère avec le dispositif moteur de relevage pour relever la flèche. En se référant à la
fig. 3 , on constatera que sa contribution est importante dans les positions médianes et les positions proches de celle montrée par lafig. 6a , c'est-à-dire lorsqu'un couple de relevage important est nécessaire, et faible dans les positions proches de celle de lafig. 6b , c'est-à-dire lorsque le dispositif moteur de relevage n'a besoin que d'un couple faible. Le système de contrepoids selon l'invention permet donc de diminuer le couple nominal maximal du dispositif de relevage. Si l'on veut obtenir une composante de rappel F assistant le dispositif de relevage au maximum dans les positions proches de celle de lafig. 6a , la voie de guidage peut présenter sa plus forte pente dans sa portion distale. - On notera que la flèche 10 montrée sur les
fig. 6a et 6b peut être une flèche rigide ou une flèche articulée comme celle de lafig. 7c . - Les
fig. 7a, 7b et 7c illustrent le fonctionnement d'une flèche articulée fonctionnant en mode de distribution articulée horizontale. Lafig. 7a , similaire à lafig. 1a , montre la flèche en position de portée minimale, fléchette 18 repliée contre pied de flèche 19. Lafig. 7c montre la flèche 10 dans une position similaire à celle de lafig. 6a , en position de portée maximale, le pied de flèche et la fléchette étant alignés. - La
fig. 7b montre la flèche dans une position intermédiaire de déploiement. L'homme du métier constatera en particulier que dans la position illustrée par lafig. 7b , le contrepoids 100 est environ à mi-course et que la composante de traction sur l'élingue de retenue 11 de la flèche est importante. Le tirant de relevage 14 de flèche attaché au chevalet 13 passe sur l'extrémité 21 de la contre-fléchette 20 qui le renvoie. L'articulation 32 formée par un axe de rotation horizontal entre le pied de flèche 19 et la fléchette 18 délimite cette dernière entre pointe de fléchette 22 et contre-fléchette 20. C'est à ce niveau qu'est attaché en 12 l'élingue de retenue 11. La rotation de la fléchette autour de l'axe d'articulation 32 est réalisée à l'aide de deux câbles antagonistes 23 et 24. Le point d'attache du câble antagoniste 23 est situé à l'extrémité de la contre-fléchette 20 afin d'obtenir le plus grand bras de levier par rapport à l'articulation 32, pour diminuer les efforts dans le câble 23 ainsi que la puissance requise du treuil électrique 25 qui l'actionne. Afin d'obtenir un comportement homogène des deux câbles antagonistes, le point d'attache du câble 24 sur la fléchette 22 est situé environ à la même distance que le câble 23 par rapport à l'articulation 32. Une poulie de renvoi 29 des câbles 23, 24 est agencée dans le pied de flèche, dans une zone proche de l'articulation 32 entre pied de flèche et fléchette, comme l'illustre lafigure 7b . Les treuils d'enroulement 25, 26 des câbles 23 et 24 sont agencés dans le pied de flèche à proximité de l'articulation 27 de la première extrémité du pied de flèche au sommet du pylône afin d'obtenir un meilleur équilibre de la grue en ramenant le plus possible les poids propres des différents éléments des treuils 25 et 26 vers le centre du pylône. Cet emplacement améliore également la maintenance du fait que les treuils se trouvent à proximité du pivot tournant. - Le point d'attache 12 de l'élingue 11, situé sur la fléchette 18, décrit un arc de cercle autour de l'axe d'articulation 32 pour optimiser le déplacement du contrepoids afin d'améliorer l'équilibre de la grue.
- Le fonctionnement de la distribution horizontale depuis la portée minimale (
fig. 7a ) jusqu'à la portée maximale,fig. 7c , en mode de travail articulé est illustré plus en détails par lesfig. 8a, 8b, 8c, 8d et 8e . Lafig. 8a montre la zone de la flèche entourant l'articulation 32 pied de flèche/fléchette dans la position de lafig. 7a . On notera que l'(les) élingues(s) de retenue de flèche passe(nt) un peu en-dessous et à droite de l'articulation 32 pied de flèche/fléchette; le câble de relevage 15 et le tirant de relevage 14 de flèche passent sur l'extrémité 21 de la contre-fléchette et se trouvent un peu à gauche de l'articulation 32 entre pied de flèche et fléchette. Les câbles 23 et 24 ont des effets antagonistes. A partir de cette position, le câble supérieur 23 est commandé par le grutier et le câble inférieur 24 se déroule. Le câble supérieur 23 est dévié par la canne supérieure 30. - Dans la position montrée par la
fig. 8b , le câble supérieur 23 tire sur la contre-fléchette, afin de continuer l'opération de déploiement, la canne supérieure 30 déviant toujours le câble supérieur 23. Le câble inférieur 24 se fait alors entraîner par le câble supérieur 23, la vitesse étant pilotée par le grutier. - Au stade montré par la
fig. 8c , le câble supérieur 23 tire toujours sur la contre-fléchette, afin de continuer le mouvement de déploiement, mais la canne supérieure 30 ne dévie plus le câble supérieur 23. Le câble inférieur 24 se fait toujours entraîner par le câble supérieur. - Au stade montré par la
fig. 8d , le câble supérieur 23 tire toujours sur la contre-fléchette, afin de continuer à déployer la flèche, et le câble inférieur 24 se fait toujours entraîner par le câble supérieur. On notera que le câble inférieur 24 entre en contact avec la canne inférieure 31 et que l'élingue de retenue 11 a dépassé l'articulation 32 entre pied de flèche et fléchette. - Dans la position illustrée par la
fig. 8e , le tirant de relevage 14 n'est plus en contact avec l'extrémité 21 de la contre-fléchette. La canne inférieure 31 augmente l'angle de traction du câble inférieur 24 afin de diminuer les efforts de celui-ci et d'assurer la stabilité des éléments autour de l'articulation 32. - Pour la fraction du déploiement qui se situe entre les
fig. 8d et 8e , on peut préférer que la contribution en force de rappel F de l'élingue de retenue de flèche 11 diminue au profit du couple C. Dans ce cas, la zone distale de la voie de guidage 1 indiquée comme zone C sur lafig. 2 peut présenter une pente inférieure à la pente de la zone B. - Les
fig. 9a et 9b illustrent le mode de travail à fléchette inclinable de la flèche articulée précédemment décrite en relation avec les groupes defig. 7 et8 . Entre les deux positions desfig. 9a et 9b , le pied de flèche 19 ne se déplace pas, il est en appui contre un dispositif de butée 33. De tels dispositifs de butée sont connus dans l'état de la technique. Le contrepoids mobile 100 est situé dans les deux positions dans une zone de pente faible de la voie de roulement, à proximité du pylône. Toutefois, du fait de la distance non nulle entre le point d'attache 12 de l'élingue de retenue de flèche et de l'articulation 32 entre pied de flèche et fléchette, ce point d'attache 12 décrit un arc de cercle autour de l'articulation 32 de la flèche, entraînant le contrepoids dans un déplacement limité. Les variations de moment du contrepoids vis-à-vis du pylône qui en résultent équilibrent les variations du moment du poids de la flèche dues à la rotation de la fléchette. La rotation de la fléchette autour de l'articulation 32 avec le pied de flèche est assurée par les systèmes de câbles antagonistes 24 et 23 de la même manière qu'exposé plus haut en relation avec le groupe defig. 8 . - Dans toutes les positions de la portée définie par le grutier, la stabilité de l'extrémité de la flèche est assurée par un frein électro-mécanique à manque de courant installé sur les moteurs des câbles 23 et 24.
- Dans un autre mode d'exécution de l'engin de levage selon l'invention, illustré par les
fig. 10a, 10b et 10c , l'ensemble de câbles antagonistes 24 et 23 avec leurs treuils d'enroulement et de déroulement 25, 26 agencés dans le pied de flèche est remplacé par un système d'engrenage 200, composé d'un moteur 201, d'un pignon 202 et d'un segment denté 203, agencés au niveau de l'articulation 232 entre le pied de flèche 204 et la fléchette 205. Le moteur électrique 201 est fixé sur le pied de flèche, il entraîne un pignon 202 qui lui-même engrène avec un segment denté circulaire 203 solidaire de la fléchette, pour assurer la rotation de la fléchette autour de l'articulation 232 entre pied de flèche et fléchette. L'agencement et la fonction des élingues de retenue 11 de flèche et du tirant de relevage 14 sont les mêmes que ceux des modes d'exécution décrits plus haut. - La
fig. 11 illustre schématiquement un exemple de réalisation de grue-tour selon l'invention. Le châssis de base présente un empâtement de 5 x 5 mètres et porte un lest de base de 46 tonnes. Le châssis de base est surmonté d'une tour ayant une hauteur sous cabine de 31 mètres et d'un pivot tournant. Celui-ci porte la plate-forme, la cabine et la flèche ainsi que la voie de guidage sur laquelle circule le lest mobile. Le poids total de la grue à vide en ordre de fonctionner est de 111,6 tonnes. - La voie de guidage, solidaire du pivot tournant au sommet du pylône s'étend depuis le pylône jusqu'à une distance de 12 mètres de celui-ci. Elle est constituée d'une paire de rails reliés par des entretoises. Chaque rail comprend une première portion rectiligne de pente 5°, s'étendant depuis le pivot tournant jusqu'à une distance de 6 mètres, d'une deuxième portion rectiligne de pente 29°, s'étendant depuis une distance de 6 mètres jusqu'à une distance de 8 mètres du pylône, et d'une troisième portion rectiligne de pente 43°, correspondant aux deux derniers mètres de la voie. Entre les première et deuxième portions rectilignes d'une part et les deuxième et troisième portions rectilignes d'autre part sont situées deux portions intermédiaires incurvées, formant les arrondis des rails, qui sont donc globalement curvilignes.
- La voie de guidage, qui constitue également la plate-forme, porte le treuil de relevage de la flèche qui a une puissance de 22 kW. La voie de guidage est surmontée d'un ensemble de poinçons et de tirants de poinçons portant les poulies de renvoi. L'ensemble s'élève à une hauteur d'environ 41,6 mètres.
- Sur cette voie de guidage circule un chariot à galets portant de part et d'autre respectivement deux plaques de béton pesant 6,5 tonnes chacune.
- Le pied de flèche loge, à proximité de son articulation avec le pivot tournant du pylône, les treuils de déploiement/ reploiement de la flèche en mode de travail articulé d'une puissance de 7,5 kW et le treuil de levage de la charge d'une puissance de 45 kW. Les poulies de renvoi correspondantes sont également logées dans le pied de flèche à proximité de l'articulation avec la fléchette. Le mode de fonctionnement de la flèche articulée a été décrit ci-dessus en relation avec les
fig. 6a à 8e . - En mode de travail articulé, la grue peut distribuer une charge maximale de 12 tonnes à vitesse réduite, ou une charge de 10 tonnes à vitesse normale, et ce dans une zone de 2 à 20 mètres du pied du pylône. La charge distribuable diminue à distance plus grande du pied du pylône. La charge maximale est de 5,6 tonnes à vitesse réduite et de 4,7 tonnes à vitesse normale à la portée maximale de travail, c'est-à-dire à 47 mètres. La vitesse de distribution peut varier de 0 à 60 mètres par minute.
- En mode de travail relevable, la charge maximale distribuable est de 12 tonnes lorsque la portée est comprise entre 5 et 20 mètres. La charge maximale se réduit à 5,6 tonnes à une portée maximale de 47 mètres. La hauteur maximale sous crochet en mode relevable est de 80 mètres. La vitesse de déplacement en mode relevable peut varier de 0 à 30 mètres par minute.
- Lorsque la grue est démontée, elle peut être transportée en pièces détachées au moyen de cinq remorques de longueurs comprises entre 6 et 12 mètres, chacune des remorques transportant un ensemble de pièces de 19,5 à 25 tonnes.
- Si l'utilisateur prévoit d'utiliser la grue exclusivement en mode de travail articulé, en distribution horizontale, le treuil de relevage de flèche peut être supprimé et le moufle de relevage est remplacé par deux tirants métalliques. Ceci permet de diminuer le prix de vente de la grue ainsi que le nombre de pièces.
Claims (18)
- Engin de levage et de manutention de charges à flèche distributrice orientable et articulée, comprenant un pylône avec un pivot tournant, une flèche articulée (10) comprenant un pied de flèche (19), articulé à sa première extrémité au sommet du pylône par un axe de rotation horizontal (27), une fléchette (18) articulée en rotation par un axe d'articulation (32) horizontal à la deuxième extrémité du pied de flèche, un ensemble de retenue de flèche comprenant au moins un poinçon (7), une élingue de retenue (11) de flèche et un contrepoids mobile (100), relié à la flèche par ladite élingue de retenue, et asservi à suivre une voie de guidage (1) de pente (α) variable, la voie de guidage (1) étant agencée à l'opposé de la flèche et supportant ledit contrepoids, caractérisé en ce que la voie de guidage est rigidement fixée au pivot tournant, et présente dans une portion (A) plus proche du pylône une pente (αA) plus faible que la pente (αB) dans au moins une portion (B) plus éloignée du pylône, la pente (αA) faisant un angle de 2° à 25° avec l'horizontale et la pente (αB) faisant un angle de l'ordre de 15° à 85° avec l'horizontale, et en ce que les variations de pente (α) sont choisies de sorte que le contrepoids exerce un ensemble de forces variables sur ladite flèche et sur la structure dudit engin, contribuant à équilibrer l'engin au cours des mouvements de déploiement/reploiement de la flèche en mode de travail articulé.
- Engin de levage selon la revendication 1, caractérisé en ce que l'élingue (11) passe, à partir du contrepoids, sur une poulie de renvoi (9) agencée à l'extrémité distale de la voie de guidage et sur une deuxième poulie de renvoi (8) agencée au sommet du poinçon (7).
- Engin de levage selon l'une des revendications 1 ou 2, caractérisé en ce que la voie de guidage (1) présente un profil curviligne.
- Engin de levage selon l'une des revendications 1 ou 2, caractérisé en ce que la voie de guidage (1) présente un profil sygmoïdal.
- Engin de levage selon l'une des revendications précédentes, caractérisé en ce que la voie de guidage (1) est constituée d'une paire de rails curvilignes (2, 3) parallèles, que le contrepoids comprend un chariot mobile (101) comprenant des moyens de roulement (105) roulant sur lesdits rails et des éléments de lest (110) portés par ledit chariot.
- Engin de levage selon la revendication 5, caractérisé en ce que le chariot (101) comprend un châssis (102, 103, 104) et, sur chacun des côtés latéraux du châssis, des éléments de support (108, 109) pour recevoir et porter lesdits éléments de lest (110) de part et d'autre des rails de telle sorte que le niveau du centre de gravité du contrepoids soit proche du niveau de la voie de guidage.
- Engin de levage selon l'une des revendications 5 ou 6, caractérisé en ce que lesdits éléments de support (108, 109) sont des paires de bras agencées en position inclinée, que lesdits éléments de lest (110) sont constitués de plaques présentant chacune des trous (111) de surface supérieure à la section des bras de support (108, 109) et configurés de façon à ce qu'une plaque de lest suspendue à une paire de bras-support associés soit maintenue en position immobile par rapport au dit chariot (101) quelle que soit la position du chariot sur la voie de guidage (1) et parallèle à ladite voie de guidage (1).
- Engin de levage selon la revendication 7, caractérisé en ce que lesdits bras de support sont repliables.
- Engin de levage selon l'une quelconque des revendications précédentes, caractérisé en ce qu'il comporte un dispositif de relevage de flèche (14, 15, 17) rendant l'engin capable de travailler en mode articulé et en mode relevable, que ladite fléchette comporte de part et d'autre de son axe d'articulation (32) au pied de flèche respectivement une pointe de fléchette (22) et une contre-fléchette (20), ladite deuxième extrémité du pied de flèche et la contre-fléchette présentant des formes conjuguées permettant à la pointe de fléchette de venir en position alignée avec le pied de flèche en position de travail relevable et en ce que les variations de pente de la voie de guidage (1) sont choisies de sorte que la traction variable sur la flèche assiste le dispositif de relevage et/ou les changements de conformation de la flèche associés à un changement de mode de travail.
- Engin de levage selon l'une quelconque des revendications précédentes, caractérisé en ce que l'extrémité de ladite élingue de retenue (11) de flèche est fixée à la fléchette.
- Engin de levage selon la revendication 10, caractérisé en ce que le point d'attache (12) de l'extrémité de l'élingue de retenue (11) de flèche est agencé entre la pointe de fléchette (22) et la contre-fléchette (20).
- Engin de levage selon la revendication 11, caractérisé en ce que ledit point d'attache (12) est agencé à distance de l'articulation (32) entre pied de flèche et fléchette de sorte à décrire un arc de cercle autour de l'axe d'articulation (32), et que ladite élingue de retenue (11) de flèche croise l'axe d'articulation (32) pied de flèche/fléchette au cours du déploiement de la flèche en mode de travail articulé, entre la position de portée minimale et la position de portée maximale.
- Engin de levage selon l'une des revendications précédentes, caractérisé en ce que la rotation de la fléchette (18) autour de l'articulation (32) pied de flèche/fléchette est commandée au moyen d'un système de câbles antagonistes (23, 24).
- Engin de levage selon la revendication 13, caractérisé en ce que le premier câble (23) est fixé à l'extrémité de la contre-fléchette (20) et que le deuxième câble (24) est fixé sur la pointe de la fléchette, à environ la même distance de l'articulation (32) que la distance du point d'attache du câble (23) par rapport à l'articulation (32) .
- Engin de levage selon la revendication 13 ou 14, caractérisé en ce que ledit système de câbles antagonistes (23, 24) comprend des treuils électriques (25, 26) et des poulies de renvoi (29) logées dans le pied de flèche (19).
- Engin de levage selon la revendication 15, caractérisé en ce que les treuils électriques (25, 26) sont logés à proximité de la première extrémité du pied de flèche (19) et les poulies de renvoi (29) à proximité de la deuxième extrémité du pied de flèche (19).
- Engin de levage selon l'une des revendications 1 à 12, caractérisé en ce que la rotation de la fléchette (205) autour de l'extrémité du pied de flèche (204) est effectuée au moyen d'un système à engrenage (200) comprenant un moteur électrique (201), un pignon (202) et un segment denté (203).
- Engin de levage selon la revendication 17, caractérisé en ce que ledit moteur électrique (201) est fixé sur le pied de flèche (204) et entraîne, via ledit pignon (202), un segment denté circulaire (203) solidaire de la fléchette (205).
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP04761917A EP1667931B1 (fr) | 2003-09-15 | 2004-09-14 | Engin de levage |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP03405677A EP1514832A1 (fr) | 2003-09-15 | 2003-09-15 | Engin de levage |
| EP04761917A EP1667931B1 (fr) | 2003-09-15 | 2004-09-14 | Engin de levage |
| PCT/CH2004/000577 WO2005026036A1 (fr) | 2003-09-15 | 2004-09-14 | Engin de levage |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1667931A1 EP1667931A1 (fr) | 2006-06-14 |
| EP1667931B1 true EP1667931B1 (fr) | 2009-10-21 |
Family
ID=34130421
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP03405677A Withdrawn EP1514832A1 (fr) | 2003-09-15 | 2003-09-15 | Engin de levage |
| EP04761917A Not-in-force EP1667931B1 (fr) | 2003-09-15 | 2004-09-14 | Engin de levage |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP03405677A Withdrawn EP1514832A1 (fr) | 2003-09-15 | 2003-09-15 | Engin de levage |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US7331476B2 (fr) |
| EP (2) | EP1514832A1 (fr) |
| AT (1) | ATE446275T1 (fr) |
| AU (1) | AU2004272136A1 (fr) |
| CA (1) | CA2539014A1 (fr) |
| DE (1) | DE602004023738D1 (fr) |
| WO (1) | WO2005026036A1 (fr) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7967158B2 (en) | 2006-10-27 | 2011-06-28 | Manitowoc Crane Companies, Llc | Mobile lift crane with variable position counterweight |
| US7546928B2 (en) | 2006-10-27 | 2009-06-16 | Manitowoc Crane Companies, Inc. | Mobile lift crane with variable position counterweight |
| US9278834B2 (en) | 2009-08-06 | 2016-03-08 | Manitowoc Crane Group, LLC | Lift crane with moveable counterweight |
| CN102259801B (zh) * | 2011-04-28 | 2013-06-05 | 上海三一科技有限公司 | 桁架臂履带起重机用折叠臂架 |
| CN102849624B (zh) * | 2011-06-29 | 2016-12-21 | 利勃海尔爱茵根有限公司 | 操作起重机的方法和起重机 |
| DE102012006494B4 (de) | 2012-03-30 | 2014-03-13 | Manitowoc Crane Group France Sas | Fahrzeugkran mit entkoppelbarer Gegengewichtsanordnung |
| CN102756978A (zh) * | 2012-07-20 | 2012-10-31 | 辽宁抚挖重工机械股份有限公司 | 一种履带起重机折叠臂 |
| NO2694106T3 (fr) * | 2012-09-12 | 2018-05-12 | ||
| CN103318781B (zh) * | 2012-11-01 | 2015-05-13 | 上海振华重工(集团)股份有限公司 | 用于码头的折臂大梁起重机 |
| CN102942125B (zh) * | 2012-12-12 | 2014-10-22 | 中联重科股份有限公司 | 副臂尾架及包含该副臂尾架的副臂、起重设备 |
| US10183848B2 (en) | 2014-01-27 | 2019-01-22 | Manitowoc Crane Companies, Llc | Height adjustment mechanism for an auxiliary member on a crane |
| CN110255402B (zh) | 2014-01-27 | 2022-02-18 | 马尼托瓦克起重机有限责任公司 | 带有改进的可动配重的吊升起重机 |
| JP6816647B2 (ja) * | 2017-05-26 | 2021-01-20 | コベルコ建機株式会社 | ジブ引込装置およびジブ引込方法 |
| CN107717949A (zh) * | 2017-11-23 | 2018-02-23 | 苏州夏木自动化科技有限公司 | 地面移动式助力机械手 |
| CN115611173A (zh) * | 2022-09-08 | 2023-01-17 | 三一海洋重工有限公司 | 一种前大梁俯仰机构及岸桥 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE261429C (fr) * | ||||
| DE279083C (fr) * | ||||
| DE289839C (fr) * | ||||
| US834647A (en) * | 1906-05-15 | 1906-10-30 | Humphrey Toomey | Hoisting apparatus. |
| US2521861A (en) * | 1949-03-22 | 1950-09-12 | Berton M Mathias | Crane with portable boom |
| US2703180A (en) * | 1952-01-05 | 1955-03-01 | American Hoist & Derrick Co | Crane |
| US3062384A (en) * | 1962-05-11 | 1962-11-06 | Seljo Dev Corp | Boom and jib assembly |
| DE1260733B (de) | 1966-05-04 | 1968-02-08 | Herbert Biedermann Dipl Ing | Wippkran, insbesondere Turmdrehkran |
| SU524762A1 (ru) * | 1973-04-23 | 1976-08-15 | Предприятие П/Я Г-4448 | Устройство дл уравновешивани грузоподъемных машин |
| DE3438937C2 (de) | 1984-10-24 | 1996-12-19 | Liebherr Werk Biberach Gmbh | Turmdrehkran mit verstellbarem Gegengewicht |
| DD253240A1 (de) * | 1986-10-13 | 1988-01-13 | Univ Magdeburg Tech | Lastmomentenausgleich fuer hubeinrichtungen mit ausleger |
| FR2605619B1 (fr) | 1986-10-27 | 1989-03-31 | Potain Sa | Engin repliable pour la manutention et le levage des charges |
| FR2641773B1 (fr) * | 1989-01-18 | 1991-03-15 | Potain Sa | Grue a fleche relevable avec dispositif de renvoi de fleche |
| DE69919517T2 (de) * | 1999-06-02 | 2005-09-29 | Jean-Marc Yerly | Kran mit aus Gliedern bestehendem Kranarm |
| EP1172323A1 (fr) * | 2000-07-11 | 2002-01-16 | Jean-Marc Yerly | Grue avec flèche articulée |
-
2003
- 2003-09-15 EP EP03405677A patent/EP1514832A1/fr not_active Withdrawn
-
2004
- 2004-09-14 AT AT04761917T patent/ATE446275T1/de not_active IP Right Cessation
- 2004-09-14 AU AU2004272136A patent/AU2004272136A1/en not_active Abandoned
- 2004-09-14 WO PCT/CH2004/000577 patent/WO2005026036A1/fr active Search and Examination
- 2004-09-14 EP EP04761917A patent/EP1667931B1/fr not_active Not-in-force
- 2004-09-14 DE DE602004023738T patent/DE602004023738D1/de active Active
- 2004-09-14 US US10/571,982 patent/US7331476B2/en not_active Expired - Fee Related
- 2004-09-14 CA CA002539014A patent/CA2539014A1/fr not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20060283826A1 (en) | 2006-12-21 |
| DE602004023738D1 (de) | 2009-12-03 |
| EP1514832A1 (fr) | 2005-03-16 |
| CA2539014A1 (fr) | 2005-03-24 |
| US7331476B2 (en) | 2008-02-19 |
| WO2005026036A1 (fr) | 2005-03-24 |
| EP1667931A1 (fr) | 2006-06-14 |
| ATE446275T1 (de) | 2009-11-15 |
| AU2004272136A1 (en) | 2005-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1667931B1 (fr) | Engin de levage | |
| FR3008403A1 (fr) | Grue sur tour orientable | |
| EP3184481B1 (fr) | Grue à tour à dépliage et repliage automatiques et comprenant un mat et une flèche décalée par rapport au mat | |
| EP1301431B9 (fr) | Grue avec fleche articulee | |
| FR2912450A1 (fr) | Eolienne dotee d'un mat rabattable et procede d'utilisation d'une telle eolienne. | |
| WO2006111827A1 (fr) | Dispositif d'aide a la construction de murs et/ou au traitement de surfaces | |
| FR2682097A1 (fr) | Fleche a repliage automatise pour grue. | |
| FR2885611A1 (fr) | Etabli elevateur | |
| EP1048605B1 (fr) | Grue avec flèche à fonctions multiples | |
| FR2605619A1 (fr) | Engin repliable pour la manutention et le levage des charges | |
| EP1184328A1 (fr) | Circuit de câble de distribution pour grue à tour | |
| FR2521969A1 (fr) | Machine transportable sur vehicule, pouvant elever une nacelle a des hauteurs differentes | |
| EP0360702B1 (fr) | Grue repliable à flèche en deux ou trois éléments articulés les uns aux autres | |
| FR2822145A1 (fr) | Nacelle elevatrice avec plate-forme et structure de support de charge associee | |
| EP1953112B1 (fr) | Engin de levage | |
| EP1061034B1 (fr) | Chariot automoteur à bras télescopique et rehausse | |
| EP0536061A1 (fr) | Grue à tour repliable automatiquement | |
| EP1057776B1 (fr) | Grue avec flèche articulée | |
| FR2930536A1 (fr) | Potence mobile de chantier | |
| FR2909082A1 (fr) | Mat de grue avec potence de lestage | |
| FR2636616A1 (fr) | Grue repliable a fleche en deux ou trois elements articules les uns aux autres | |
| FR2626865A1 (fr) | Nacelle pour fleche telescopique d'engin de levage | |
| BE1006161A7 (fr) | Dispositif a godet elevateur pour des materiaux, notamment dans une centrale de fabrication de beton. | |
| EP2544984B1 (fr) | Engin de levage mobile | |
| BE513255A (fr) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20060411 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| 17Q | First examination report despatched |
Effective date: 20060719 |
|
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IT LI LU MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 602004023738 Country of ref document: DE Date of ref document: 20091203 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: ABREMA AGENCE BREVET ET MARQUES, GANGUILLET |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100201 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100121 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| 26N | No opposition filed |
Effective date: 20100722 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100122 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100422 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100914 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20091021 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20120920 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20120921 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20120920 Year of fee payment: 9 Ref country code: FR Payment date: 20121010 Year of fee payment: 9 Ref country code: CH Payment date: 20121005 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20091021 |
|
| BERE | Be: lapsed |
Owner name: YERLY, JEAN-MARC Effective date: 20130930 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20130914 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602004023738 Country of ref document: DE Effective date: 20140401 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20140530 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130914 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130930 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130930 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130930 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140401 |