EP1626154A1 - Method of operating a rollerblind, controlled and powered through a wire control interface - Google Patents
Method of operating a rollerblind, controlled and powered through a wire control interface Download PDFInfo
- Publication number
- EP1626154A1 EP1626154A1 EP05016377A EP05016377A EP1626154A1 EP 1626154 A1 EP1626154 A1 EP 1626154A1 EP 05016377 A EP05016377 A EP 05016377A EP 05016377 A EP05016377 A EP 05016377A EP 1626154 A1 EP1626154 A1 EP 1626154A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- key
- motor
- actuator
- mode
- operating method
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title abstract description 22
- 230000033001 locomotion Effects 0.000 claims abstract description 63
- 230000006870 function Effects 0.000 claims abstract description 22
- 238000010200 validation analysis Methods 0.000 claims abstract description 12
- 238000011017 operating method Methods 0.000 claims description 15
- 230000009471 action Effects 0.000 claims description 12
- 230000037072 sun protection Effects 0.000 claims description 6
- 230000004913 activation Effects 0.000 abstract description 2
- 238000012217 deletion Methods 0.000 abstract 1
- 230000037430 deletion Effects 0.000 abstract 1
- 230000001276 controlling effect Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 4
- 238000004804 winding Methods 0.000 description 4
- 239000003990 capacitor Substances 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 239000004020 conductor Substances 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 230000001419 dependent effect Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000000007 visual effect Effects 0.000 description 2
- 230000005355 Hall effect Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 230000007717 exclusion Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002045 lasting effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000005693 optoelectronics Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
- 230000008672 reprogramming Effects 0.000 description 1
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/68—Operating devices or mechanisms, e.g. with electric drive
Definitions
- the invention relates to a method of operating an actuator intended to drive a mobile closure, concealment or sun protection element or a projection screen, comprising a motor, an electronic unit for controlling the power supply of the motor and a control interface provided with at least a first key and a second key on which a support usually causes a movement of the motor in a first direction, respectively, a movement of the motor in a second direction.
- the invention also relates to an actuating unit and an actuator for implementing the method.
- Such actuators are used to maneuver, thanks to the mechanical energy provided by the motor, movable elements closing, occultation or sun protection. A user can control the movements of this element by pressing on control keys of a control interface.
- configuration operations can be performed during the installation of the actuator, for example during the first power up of the actuator, but also during the life cycle of the product during maintenance operations for example. Certain configuration steps such as end position records can be performed automatically if the actuators have electronic means permitting.
- the control interface must then provide, in addition to the enumerated adjustment functions, the functions of controlling movement of the movable element upwards, moving the movable element downwards and stopping the movement of the mobile element. mobile element. Even in a programming mode and whatever the method of entry in this mode, it is necessary to move the movable element up and down in order to validate configurations or record positions. It is It is also possible to define ergonomics that allow you to validate configurations or save parameters or positions without actually changing the operating mode. These validations and registrations must not be able to be carried out in an untimely manner.
- the actuator is advantageous to supply the actuator with electrical energy via the control interface. This limits cabling operations and limits the number of cables that must be entered into the actuator housing.
- the disadvantage of this construction is obviously that the actuator is powered only at the time of a user command or control of an automation.
- EP 0 822 315 discloses a device for controlling the supply of an asynchronous electric motor in which a short-circuiting of the phase lines allowing the rotation of the motor in a first direction and in a second direction by simultaneously pressing the motor rotation control keys in the first direction and in the second direction, places a control unit in a configuration mode. Once in this configuration mode, the rotation of the motor is controlled by pressing the keys used to control the rotation of the motor in the control mode.
- Such a device can only work with certain types of control boxes only. In particular, this device can not operate with fixed or momentary position inverting control units with mechanical exclusion.
- US Pat. No. 6,078,159 discloses a device for operating a closure element.
- the device comprises a control box provided with two keys allowing respectively to control the displacements of a mobile element in a first direction and in a second direction.
- To place this device in a configuration mode it is necessary to actuate at least two times one or the other of the keys in a predefined time range and less than the duration of actuation allowing the control of the movement of the mobile element.
- This kind of procedure allowing the passage of the device in a configuration mode is quite difficult to implement when the control unit is a fixed position inverter.
- Application FR 2 808 834 discloses a device for controlling the motorized occultation element.
- This device includes a remote control allowing the user to send movement orders of the motorized element. It also includes means dedicated to reprogramming. These means comprise a shunt for connecting the phase conductor of the power supply cable to an input of a control circuit. The conduction times of the shunt are measured to determine their meanings (change of operating mode, validation of parameters or positions, etc.).
- the movements of the motorized element can be sequentially controlled by a backup button when the remote control is deficient. This push button is therefore an additional backup control interface.
- EP 0 718 730 discloses a device for controlling various motorized concealment elements. A particular sequence of presses on push buttons attached to an element allowing in a control mode to control the upward movement or down this item toggles this item into a configuration mode, attaching it to a group of elements, and defining its role (master or slave) in that group.
- EP 0 997 605 discloses a device for controlling the motorized occultation element.
- This device includes a remote control with push buttons.
- the commands associated with the push buttons depend on the active state or the operating mode of the remote control and differ from one to the other.
- These push buttons are associated, depending on the active state of the remote control determined by switches, to different control actions and configuration of the motorized element.
- a garage door actuator device comprising an interface provided with a control button and a programming button.
- the control knob is used to control the power supply of the actuator motor and the programming knob is used to configure the device.
- Other functions can be obtained by ergonomics of specific supports on these buttons. Such a device is impractical because it constantly imposes a sequential control of the movements of the garage door.
- the object of the invention is to provide a method of operating an actuator to overcome the drawbacks mentioned above and to improve the operating methods of known actuators of the prior art.
- the invention proposes a method of operating an actuator in which the configuration and reconfiguration of the actuator are easy and which makes it possible to maintain actuator displacement functions via the interface of the actuator. command and validate settings without any activation of a control button may cause the actuator to move.
- the control method allows the use of a very simple structure control interface (for example consisting of a housing provided with two keys) and that this method gives this interface a large number of functions. .
- this method can be implemented by a device comprising an interface of any type and, in particular, of the type whose keys consist of pushbuttons, double position-maintained switches or switches. rocker switches.
- the operating method according to the invention is characterized in that, in at least one mode of operation, the motions of the motor in both directions are controlled by pressing on the first key exclusively.
- the actuating unit is intended to drive a movable closure element, occultation or sun protection or a projection screen. It comprises a motor, an electronic engine power control unit provided with two phase terminals and intended to be connected to a control interface provided with at least one first key and a second key to constitute an actuator capable of operate in different modes. It is characterized in that the electronic unit comprises hardware and software means for implementing the previously defined method.
- the actuator according to the invention comprises an actuation unit defined above and a control interface provided with at least a first key and a second key.
- the attached drawing shows, by way of example, an embodiment of the operating method according to the invention and various embodiments of the device for implementing the method.
- Figure 1 is a diagram of an embodiment of an actuating device for implementing the method according to the invention.
- FIG. 2 is a flow chart of a procedure for configuring an end position using a first embodiment of the operating method according to the invention.
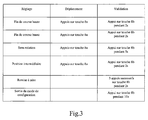
- FIG. 3 is a table summarizing the various ergonomics to be used to carry out certain configuration operations of an actuator operating according to this embodiment of the method according to the invention.
- Figure 4 is a detailed diagram of an embodiment of an actuator.
- FIGS 5 to 7 are detailed diagrams of different embodiments of an actuator.
- Figure 8 is a diagram showing the compatibilities of the actuating unit according to the invention.
- An actuator 1 is shown schematically in FIG. 1. It mainly comprises a control interface 7 and an actuating unit 2 comprising an electronic control unit 5 and a motor 4.
- the actuating unit is mechanically linked, possibly by means of a gearbox, to a movable element 3 occlusion closure or sun protection or a projection screen to cause the displacement thereof.
- the movable element 3 may in particular consist of a shutter, a blind or a door.
- the electronic control unit 5 is linked to the motor 4, it manages the movements of the latter through its power supply.
- the electronic control unit comprises a memory 6, and furthermore has the function of determining the position in which the mobile element 3 is at each moment.
- the actuating unit may comprise for this purpose a counting device associated with a Hall effect type sensor or an optoelectronic type sensor, for example.
- This interface has the form of a housing with two control keys.
- a key 8a makes it possible to control the movement of the movable element in a first direction, for example the rise
- a key 8b makes it possible to control the movement of the movable element in a second sense, for example the descent.
- Pressing one of the control keys causes the sending of a command command to the electronic control unit, which consequently drives a rotation of the motor in the direction corresponding to the command order and finally moving the movable member 3.
- the control interface 7 is connected to a source of electrical voltage, such as the AC 230 volts, by means of two son. It is also connected via three wires to the actuating unit and more particularly to the electronic control unit 5. These wires make it possible to transmit to the actuating unit not only control commands but also the electrical energy necessary to supply the electronic control unit 5 and the motor 4.
- the electric circuit of such an actuator is shown in more detail in FIG. 4.
- the control interface 7 is connected to the voltage source by two wires Ph and N.
- two contacts S1 and S2 are connected in parallel. They are mechanically connected to the keys 8a or 8b and are, at rest, normally open. Downstream, these contacts S1 and S2 are respectively connected to two conducting wires PH1 and PH2 connected to the electronic control unit 5.
- a wire N carrying the neutral passes through the control interface and is connected to the electronic control unit. ordered. Pressing the key 8a causes the closing of the contact S1 and pressing the key 8b closing the contact S2.
- the electronic control unit 5 mainly comprises a microcontroller 9. It is supplied through rectifying and regulating devices 10a, 10b by the voltages existing between the wire N and one of the two wires PH1 and PH2 attacking the unit electronic.
- the two PH1 and PH2 son attacking the electronic unit can be alternately connected to a motor PHM supply wire through a power management module PM comprising a bistable relay T.
- This PHM wire can supply via a controlled switch RL1 a first winding W1 of the motor in parallel with a series connection a second winding W2 of the motor and a capacitor CM for rotating the motor in a first direction and can supply via a controlled switch RL2 the second winding W2 of the motor in parallel with a series connection of the first winding W1 of the motor and capacitor CM to rotate the motor in a second direction.
- the controlled switches RL1 and RL2 may consist of power transistors or relays.
- the states of the bistable relay T and the controlled switches RL1 and RL2 are controlled by outputs of the microcontroller 9. With the management module PM, when the single contact S1 is closed, the motor can be powered to turn in one direction or in the other direction. other via the bistable relay T and one of the controlled switches RL1 or RL2.
- the microcontroller comprises means (for example comparators) for determining the voltages available on lines PH1 and PH2. On the basis of this information, it controls via its outputs the states of the bistable relay T and the controlled switches RL1 and RL2.
- the control interface 7 can also communicate with the electronic control unit 5 via radio waves.
- the control unit 7 and the electronic control unit 5 respectively comprise at least one transmitter and one radio wave receiver.
- a first embodiment of the method according to the invention is represented by the flow chart of FIG. 2.
- this first execution mode is applied to a configuration procedure of an end-of-travel position.
- control mode A an operating mode in which a pressing on the key 8a of the control interface causes a movement of the motor resulting in a displacement upward of the movable element and wherein pressing the key 8b of the control interface causes a movement of the motor resulting in a downward movement of the movable member.
- the actuator switches, in a step 100, in a second mode of operation, called "configuration mode".
- configuration mode the functions of the control keys 8a and 8b are modified relative to those of the control mode A.
- an ergonomics as described in document EP 0 822 315 at lines 4 to 10 of the column Or in US 6,078,159 in claim 1 causes the control mode to switch to the configuration mode. Failover in the configuration mode can also be performed after a first power-up, a power supply cut-off sequence, a short-circuit between the two phase lines, or any other ergonomics of key presses.
- one of the keys for example the key 8a
- the other key for example the key 8b provides a function of setting enable.
- the control of the motions of the motor is then sequential: a first pressing on the key 8a causes a movement of rise of the movable element, a second pressing on the key 8a causes a stop of the movement of the movable element, a third press on the key 8a causes a movement of descent of the movable element, a fourth pressing of the key 8a causes a stop of the movement of the movable element, a fifth pressing of the key 8a causes a rising movement of the movable element, etc.
- the movement can also be controlled only as long as an action is exerted on the key 8a.
- a first pressing of the key 8a causes a rising movement of the movable element as long as this support is maintained. Releasing this support causes the stopping of the movable element.
- a second pressing of the key 8a causes a movement of descent of the movable element as long as this support is maintained. Releasing this support causes the stopping of the movable element.
- a third pressing of the key 8a causes a rising movement of the movable element as long as this support is maintained. The release of this support causes the stopping of the movable element, etc ...
- this key 8a it is possible to move the movable element in the configuration mode, to a particular position to be recorded for example or to a position to be modified.
- a step 110 the movable element is moved to a particular position by pressing the key 8a. Fine adjustments of this particular position are possible through successive presses on the key 8a sequentially controlling the movements of the moving element back and forth.
- the movable member validates it in a step 120 by pressing the key 8b.
- a step 130 it is tested whether the duration of pressing the key 8b is equal to or deemed to be equal to two seconds. If this is not the case, proceed to a step 170 in which further tests are performed and where, depending on the results of these tests, the current configuration procedure is terminated or the configuration mode is exited.
- step 140 If the duration of pressing the key 8b is equal to or deemed to be equal to two seconds, it is tested, in a step 140, whether the validated position corresponds to a position already recorded. If this is the case, the recorded position is cleared in a step 160 and it is returned to step 110.
- the position validated is recorded in a step 150.
- Detection of the end positions can also be performed automatically if the actuator has electronic means permitting.
- a visual feedback may be provided, for example by a slight movement of the moving element back and forth, to signal the installer to record a position.
- the installer causes the output of the configuration mode and the return to the command mode A at a step 160 by pressing the key 8b.
- the keys 8a and 8b then resume their initial functions of controlling up and down movements.
- the table in Figure 3 summarizes an example of actions to perform the configuration settings of the actuator.
- the desired end positions are reached by pressing the key 8a as described above. They are then recorded by pressing for two seconds the key 8b having in this mode a validation function. In practice, pressing a key longer than one second and less than 3.5 seconds is deemed to be a two-second press on this key.
- One or more intermediate positions of the movable element can be defined in the same way, possibly from the moment when the end positions have been previously recorded.
- a sequence of presses must be performed on the validation key 8b. This sequence is for example defined by three successive supports of a duration two seconds. Following this sequence all the recordings and settings are erased.
- Other configuration operations can also be implemented, such as for example the learning of the direction of rotation of the motor to be controlled, in the control mode A, by the key 8a and the direction of rotation of the motor to be controlled. by the key 8b.
- This operation is necessary in certain cases if the management of the limit switches is different when the moving element approaches its high point or its low point.
- the actuator can be mounted to the left or right relative to the opening, it must learn which direction of rotation of the motor corresponds to the opening or closing movement of the movable element that it controls. This learning may consist of simply imposing a limit switch, high or low, first, but other ergonomics can be provided.
- the user can position the mobile element halfway (away from the limit switches, whether pre-adjusted or not) by a sequence of presses on the key 8a, taking care to complete the sequence of positioning by a movement in an imposed direction, for example a movement of the movable element upwards. It then validates this last movement by pressing the validation key 8b for a predetermined time, which may be longer or shorter than a support validating a limit position. For example, a confirmation of the direction of rotation of the motor will last five seconds. In practice, support lasting more than 3.5 seconds and less than 7 seconds will be deemed to be a five-second press.
- validation operations may for example be implemented according to the duration and / or the number of presses on the validation key.
- the output of the configuration mode can also be done by pressing and holding the confirmation key.
- a setup mode exit press will last ten seconds. In practice, a support longer than 7 seconds and less than 13 seconds will be deemed to be a ten-second press.
- This allocation can be dynamic, that is to say that it can be done logically according to certain parameters such as, for example, the key on which the first support occurs in the configuration mode for example.
- FIGS. 5 to 7 Various variants of actuators are shown in FIGS. 5 to 7.
- the actuating unit is connected to other types of control interfaces thanks to which, in control modes as in configuration modes, the movements of the movable element are controlled exclusively by actions on a single control key.
- a first actuator variant shown in FIG. 5 differs from the actuator described with reference to FIG. 4 in that the contact S2 of the control interface 7 'is short-circuited by a shunt SH.
- the control interface 7 ' is originally identical to the control interface 7 usually for controlling respectively by action on the keys 8a and 8b, the movements of the motor in a first direction and in a second direction. This has simply been modified by the addition of an SH shunt to present other functionalities once associated with the electronic control unit 5.
- SH shunt allows the electronic control unit 5 and, in particular, the microcontroller 9 to be permanently supplied by the PH2 phase wire.
- the electronic control unit is able to measure the opening times of the contact S1 as well as the closing times of this contact.
- This makes it possible to associate, as well in a second control mode B as in the configuration mode, with the key 8a linked to the contact S1, a large number of functions other than the functions of sequential control of the motions of the motor.
- This also allows to supply a radio order receiving device communicating with automatic measuring devices (for example measuring wind or brightness) which are capable of controlling a movement of the motor to move the movable element without having to it is necessary to exert an action on the control interface 7 '.
- FIG. 8 This compatibility of the actuating unit according to the invention is illustrated in FIG. 8 on which are represented the various operating modes of an actuator and the conditions of use thereof.
- the actions on the key 8b linked to the contact S2 can again be identified by the microcontroller 9.
- the presses or successions of pressing the key 8b can then be associated with various functions including functions used in a configuration mode of the actuator such as switching orders from one operating mode to another or setting enable.
- control interface 7 has been modified by replacing the closing contact S2 by an opening contact S2 "to constitute the control interface 7".
- the operation of such an actuator is similar to that described above.
- the configuration operations are simplified. Indeed, rather than having to set up or remove a shunt, it is sufficient in this variant to press the 8b key or release it. This key may be accessible only when a casing of the control interface has been removed.
- Key 8b can also be used to move the actuator into a configuration mode. For example, it is possible with this key to simulate a power cut sequence, a temporary power supply of the electronic control unit being provided by a capacitor discharge or by pressing the key 8a.
- control interface 7 has been modified by replacing the closing contact S2 by a push-button with two fixed positions S2 '''to constitute the control interface 7'''.
- a first support allows the power supply of the actuator, a second support the cut.
- This operation preferably requires visual feedback means to know what state is the power switch.
- phase line PH1 is connected to the controlled switches RL1 and RL2 via the relay T.
- the operating programs of the operating unit used are different depending on whether the operating unit is connected to an interface described with reference to FIG. 4 or to one of the interfaces described with reference to FIGS. 5 to 7. These programs can however be contained in the same electronic control unit. In this case, mechanical and / or electronic means allow the manual or automatic selection of the operating program adapted to the actuator and, in particular, adapted to the control interface of this actuator.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Power-Operated Mechanisms For Wings (AREA)
- Operating, Guiding And Securing Of Roll- Type Closing Members (AREA)
- Selective Calling Equipment (AREA)
- Lock And Its Accessories (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Metal Rolling (AREA)
- Input From Keyboards Or The Like (AREA)
- Projection Apparatus (AREA)
Abstract
Description
L'invention concerne un procédé de fonctionnement d'un actionneur destiné à entraîner un élément mobile de fermeture, d'occultation ou de protection solaire ou un écran de projection, comprenant un moteur, une unité électronique de commande de l'alimentation du moteur et une interface de commande munie d'au moins une première touche et une deuxième touche sur lesquelles un appui provoque habituellement, un mouvement du moteur dans un premier sens, respectivement, un mouvement du moteur dans un deuxième sens. L'invention concerne également une unité d'actionnement et un actionneur pour la mise en oeuvre du procédé.The invention relates to a method of operating an actuator intended to drive a mobile closure, concealment or sun protection element or a projection screen, comprising a motor, an electronic unit for controlling the power supply of the motor and a control interface provided with at least a first key and a second key on which a support usually causes a movement of the motor in a first direction, respectively, a movement of the motor in a second direction. The invention also relates to an actuating unit and an actuator for implementing the method.
De tels actionneurs sont utilisés pour manoeuvrer, grâce à l'énergie mécanique fournie par le moteur, des éléments mobiles de fermeture, d'occultation ou de protection solaire. Un utilisateur peut commander les déplacements de cet élément par des appuis sur des touches de commande d'une interface de commande.Such actuators are used to maneuver, thanks to the mechanical energy provided by the motor, movable elements closing, occultation or sun protection. A user can control the movements of this element by pressing on control keys of a control interface.
Dans les cas d'interfaces de commande très simples ne comprenant que deux touches associées aux deux sens de déplacement de l'élément, il apparaît nécessaire de prévoir un outil spécifique permettant de configurer l'actionneur, en définissant, par exemple :
- la configuration de l'interface de commande pour assurer qu'une action sur une touche de l'interface devant entraîner la montée de l'élément mobile provoque effectivement une montée de l'élément mobile (si nécessaire l'inversion peut être prévue par une ergonomie ou par un re-câblage manuel),
- l'apprentissage du sens de rotation (nécessaire bien que les mouvements de l'élément mobile correspondent aux appuis sur les touches de l'interface de commande) si l'actionneur comprend des moyens de détection de butée électronique ayant un comportement différent selon que l'élément mobile arrive en fin de course haute ou basse. En effet, l'actionneur ne connaît pas son sens d'orientation, vu qu'il peut avoir été monté à droite ou à gauche),
- le réglage de fins de course,
- la réinitialisation des fins de course et/ou des sens de rotation,
- le re-réglage de fins de course,
- le réglage d'une position intermédiaire.
- the configuration of the control interface to ensure that an action on a key of the interface to cause the rise of the movable element actually causes a rise of the movable element (if necessary the inversion can be provided by a ergonomics or manual re-wiring),
- learning the direction of rotation (necessary although the movements of the movable element correspond to the supports on the buttons of the control interface) if the actuator comprises electronic limit detection means having a different behavior depending on whether the moving element reaches the end of high or low stroke. Actually, the actuator does not know its direction of orientation, since it may have been mounted on the right or on the left),
- the setting of end positions,
- resetting the limit switches and / or the direction of rotation,
- the resetting of limit switches,
- adjusting an intermediate position.
Ces opérations de configuration peuvent être effectuées lors de l'installation de l'actionneur, par exemple lors de la première mise sous tension de l'actionneur, mais également pendant le cycle de vie du produit lors d'opérations de maintenance par exemple. Certaines étapes de configuration telles que les enregistrements de positions de fin de course peuvent être effectuées automatiquement si les actionneurs disposent de moyens électroniques le permettant.These configuration operations can be performed during the installation of the actuator, for example during the first power up of the actuator, but also during the life cycle of the product during maintenance operations for example. Certain configuration steps such as end position records can be performed automatically if the actuators have electronic means permitting.
Il apparaît très intéressant de définir un procédé de fonctionnement permettant d'éviter d'avoir recours à un outil spécifique de configuration. Ce procédé doit permettre de réaliser des opérations manuelles de configuration ou de lancer des opérations automatiques de configuration en ayant uniquement recours à l'interface de commande de l'actionneur.It appears very interesting to define a method of operation to avoid using a specific configuration tool. This method must make it possible to carry out manual configuration operations or to launch automatic configuration operations using only the control interface of the actuator.
L'interface de commande doit alors assurer, en plus des fonctions de réglages énumérées, les fonctions de commande de déplacement de l'élément mobile vers le haut, de déplacement de l'élément mobile vers le bas et d'arrêt du déplacement de l'élément mobile. Même dans un mode de programmation et quel que soit le procédé d'entrée dans ce mode, il faut pouvoir déplacer l'élément mobile vers le haut et vers le bas afin de pouvoir valider des configurations ou enregistrer des positions. Il est également possible de définir des ergonomies qui permettent de valider des configurations ou enregistrer des paramètres ou positions sans véritablement changer de mode de fonctionnement. Ces validations et enregistrements ne doivent pas pouvoir être réalisés de manière intempestive.The control interface must then provide, in addition to the enumerated adjustment functions, the functions of controlling movement of the movable element upwards, moving the movable element downwards and stopping the movement of the mobile element. mobile element. Even in a programming mode and whatever the method of entry in this mode, it is necessary to move the movable element up and down in order to validate configurations or record positions. It is It is also possible to define ergonomics that allow you to validate configurations or save parameters or positions without actually changing the operating mode. These validations and registrations must not be able to be carried out in an untimely manner.
Par ailleurs, il est intéressant d'alimenter l'actionneur en énergie électrique par l'intermédiaire de l'interface de commande. Cela permet de limiter les opérations de câblage et de limiter le nombre de câbles qu'il faut faire entrer dans le carter de l'actionneur. L'inconvénient lié à cette construction est évidemment que l'actionneur n'est alimenté qu'au moment d'une commande utilisateur ou d'une commande d'un automatisme.Furthermore, it is advantageous to supply the actuator with electrical energy via the control interface. This limits cabling operations and limits the number of cables that must be entered into the actuator housing. The disadvantage of this construction is obviously that the actuator is powered only at the time of a user command or control of an automation.
On connaît par exemple, de la demande EP 0 822 315, un dispositif de commande de l'alimentation d'un moteur électrique asynchrone dans lequel, une mise en court-circuit des lignes de phase permettant la rotation du moteur dans un premier sens et dans un deuxième sens par un appui simultané sur des touches de commande de rotation du moteur dans le premier sens et dans le deuxième sens, place une unité de commande dans un mode de configuration. Une fois dans ce mode de configuration, la rotation du moteur est commandée par des appuis sur les touches servant à commander la rotation du moteur dans le mode de commande. Un tel dispositif ne peut fonctionner qu'avec certains types de boîtiers de commande seulement. En particulier, ce dispositif ne peut pas fonctionner avec des boîtiers de commande de type inverseur à position fixe ou momentanée avec exclusion mécanique.For example, EP 0 822 315 discloses a device for controlling the supply of an asynchronous electric motor in which a short-circuiting of the phase lines allowing the rotation of the motor in a first direction and in a second direction by simultaneously pressing the motor rotation control keys in the first direction and in the second direction, places a control unit in a configuration mode. Once in this configuration mode, the rotation of the motor is controlled by pressing the keys used to control the rotation of the motor in the control mode. Such a device can only work with certain types of control boxes only. In particular, this device can not operate with fixed or momentary position inverting control units with mechanical exclusion.
On connaît du brevet US 6,078,159 un dispositif de manoeuvre d'un élément de fermeture. Le dispositif comprend un boîtier de commande muni de deux touches permettant respectivement de commander les déplacements d'un élément mobile dans un premier sens et dans un deuxième sens. Pour placer ce dispositif dans un mode de configuration, il est nécessaire d'actionner au moins deux fois l'une ou l'autre des touches dans une plage temporelle prédéfinie et inférieure à la durée d'actionnement permettant la commande du mouvement de l'élément mobile. Ainsi, lorsqu'on veut commander le déplacement de l'élément mobile, il est nécessaire d'actionner la touche de commande pendant une durée supérieure à celle de la plage temporelle prédéfinie. Ce genre de procédure permettant le passage du dispositif dans un mode de configuration est assez difficile à mettre en oeuvre lorsque le boîtier de commande est un inverseur à position fixe.US Pat. No. 6,078,159 discloses a device for operating a closure element. The device comprises a control box provided with two keys allowing respectively to control the displacements of a mobile element in a first direction and in a second direction. To place this device in a configuration mode, it is necessary to actuate at least two times one or the other of the keys in a predefined time range and less than the duration of actuation allowing the control of the movement of the mobile element. Thus, when it is desired to control the movement of the movable element, it is necessary to actuate the control key for a duration greater than that of the predefined time range. This kind of procedure allowing the passage of the device in a configuration mode is quite difficult to implement when the control unit is a fixed position inverter.
On connaît de la demande FR 2 808 834, un dispositif de commande d'élément motorisé d'occultation. Ce dispositif comprend une télécommande permettant à l'utilisateur d'envoyer des ordres de mouvement de l'élément motorisé. Il comprend en outre des moyens dédiés à sa reprogrammation. Ces moyens comprennent un shunt permettant de relier le conducteur de phase du câble d'alimentation électrique à une entrée d'un circuit de commande. Les durées de conduction du shunt sont mesurées pour déterminer leurs significations (changement de mode de fonctionnement, validation de paramètres ou de positions...). Dans ce dispositif, les mouvements de l'élément motorisé peuvent être commandés séquentiellement par un bouton poussoir de secours lorsque la télécommande est déficiente. Ce bouton poussoir constitue par conséquent une interface de commande supplémentaire de secours.
On connaît de la demande EP 0 718 730, un dispositif de commande de différents éléments motorisés d'occultation. Une séquence particulière d'appuis sur des boutons poussoirs rattachés à un élément permettant dans un mode de commande de commander le déplacement vers le haut ou vers le bas de cet élément permet de faire basculer cet élément dans un mode de configuration, de le rattacher à un groupe d'éléments et à définir son rôle (maître ou esclave) dans ce groupe.EP 0 718 730 discloses a device for controlling various motorized concealment elements. A particular sequence of presses on push buttons attached to an element allowing in a control mode to control the upward movement or down this item toggles this item into a configuration mode, attaching it to a group of elements, and defining its role (master or slave) in that group.
On connaît de la demande EP 0 997 605, un dispositif de commande d'élément motorisé d'occultation. Ce dispositif comprend une télécommande munie de boutons poussoirs. Les commandes associées aux boutons poussoirs dépendent de l'état actif ou du mode de fonctionnement de la télécommande et diffèrent selon ceux-ci. Ces boutons poussoirs sont associés, en fonction de l'état actif de la télécommande déterminé par des commutateurs, à différentes actions de commande et de configuration de l'élément motorisé.EP 0 997 605 discloses a device for controlling the motorized occultation element. This device includes a remote control with push buttons. The commands associated with the push buttons depend on the active state or the operating mode of the remote control and differ from one to the other. These push buttons are associated, depending on the active state of the remote control determined by switches, to different control actions and configuration of the motorized element.
On connaît encore de la demande DE 198 31 119 un dispositif d'actionneur de porte de garage comprenant une interface munie d'un bouton de commande et d'un bouton de programmation. Le bouton de commande sert à commander l'alimentation du moteur de l'actionneur et le bouton de programmation sert à configurer le dispositif. D'autres fonctions peuvent être obtenues par des ergonomies d'appuis spécifiques sur ces boutons. Un tel dispositif est peu pratique car il impose en permanence une commande séquentielle des mouvements de la porte de garage.DE 198 31 119 is still known a garage door actuator device comprising an interface provided with a control button and a programming button. The control knob is used to control the power supply of the actuator motor and the programming knob is used to configure the device. Other functions can be obtained by ergonomics of specific supports on these buttons. Such a device is impractical because it constantly imposes a sequential control of the movements of the garage door.
Le but de l'invention est de fournir un procédé de fonctionnement d'un actionneur permettant de pallier aux inconvénients précédemment cités et d'améliorer les procédés de fonctionnement des actionneurs connus de l'art antérieur. En particulier, l'invention propose un procédé de fonctionnement d'un actionneur dans lequel la configuration et la reconfiguration de l'actionneur sont aisées et qui permet de conserver des fonctions de déplacement de l'actionneur par l'intermédiaire de l'interface de commande et de valider des réglages sans qu'une activation d'une touche de commande ne risque d'entraîner un mouvement de l'actionneur. En outre, il est souhaitable que le procédé de commande permette l'utilisation d'une interface de commande de structure très simple (par exemple consistant en un boîtier muni de deux touches) et que ce procédé confère à cette interface un nombre important de fonctions. Il est enfin souhaitable que ce procédé puisse être mis en oeuvre par un dispositif comprenant une interface de n'importe quel type et, en particulier, du type dont les touches consistent en des boutons poussoirs, en des doubles interrupteurs à position maintenue ou en des interrupteurs à bascule.The object of the invention is to provide a method of operating an actuator to overcome the drawbacks mentioned above and to improve the operating methods of known actuators of the prior art. In particular, the invention proposes a method of operating an actuator in which the configuration and reconfiguration of the actuator are easy and which makes it possible to maintain actuator displacement functions via the interface of the actuator. command and validate settings without any activation of a control button may cause the actuator to move. In addition, it is desirable that the control method allows the use of a very simple structure control interface (for example consisting of a housing provided with two keys) and that this method gives this interface a large number of functions. . Finally, it is desirable that this method can be implemented by a device comprising an interface of any type and, in particular, of the type whose keys consist of pushbuttons, double position-maintained switches or switches. rocker switches.
Le procédé de fonctionnement selon l'invention est caractérisé en ce que, dans au moins un mode de fonctionnement, les mouvements du moteur dans les deux sens sont commandés par des appuis sur la première touche exclusivement.The operating method according to the invention is characterized in that, in at least one mode of operation, the motions of the motor in both directions are controlled by pressing on the first key exclusively.
Différentes variantes d'exécution du procédé sont définies par les revendications dépendantes 2 à 10.Different alternative embodiments of the process are defined by
L'unité d'actionnement selon l'invention est destinée à entraîner un élément mobile de fermeture, d'occultation ou de protection solaire ou un écran de projection. Elle comprend un moteur, une unité électronique de commande de l'alimentation du moteur munie de deux bornes de phase et destinée à être reliée à une interface de commande munie d'au moins une première touche et une deuxième touche pour constituer un actionneur susceptible de fonctionner selon différents modes. Elle est caractérisée en ce que l'unité électronique comprend des moyens matériels et logiciels pour la mise en oeuvre du procédé précédemment défini.The actuating unit according to the invention is intended to drive a movable closure element, occultation or sun protection or a projection screen. It comprises a motor, an electronic engine power control unit provided with two phase terminals and intended to be connected to a control interface provided with at least one first key and a second key to constitute an actuator capable of operate in different modes. It is characterized in that the electronic unit comprises hardware and software means for implementing the previously defined method.
Différents modes de réalisation de l'unité d'actionnement sont définis par les revendications dépendantes 12 à 16.Different embodiments of the actuating unit are defined by the dependent claims 12 to 16.
L'actionneur selon l'invention comprend une unité d'actionnement définie précédemment et une interface de commande munie d'au moins une première touche et une deuxième touche.The actuator according to the invention comprises an actuation unit defined above and a control interface provided with at least a first key and a second key.
Le dessin annexé représente, à titre d'exemples, un mode d'exécution du procédé de fonctionnement selon l'invention et différents modes de réalisation du dispositif pour mettre en oeuvre le procédé.The attached drawing shows, by way of example, an embodiment of the operating method according to the invention and various embodiments of the device for implementing the method.
La figure 1 est un schéma d'un mode de réalisation d'un dispositif d'actionnement pour mettre en oeuvre le procédé selon l'invention.Figure 1 is a diagram of an embodiment of an actuating device for implementing the method according to the invention.
La figure 2 est un ordinogramme d'une procédure de configuration d'une position de fin de course utilisant un premier mode d'exécution du procédé de fonctionnement selon l'invention.FIG. 2 is a flow chart of a procedure for configuring an end position using a first embodiment of the operating method according to the invention.
La figure 3 est un tableau récapitulant les différentes ergonomies à mettre en oeuvre pour réaliser certaines opérations de configuration d'un actionneur fonctionnant selon ce mode d'exécution du procédé selon l'invention.FIG. 3 is a table summarizing the various ergonomics to be used to carry out certain configuration operations of an actuator operating according to this embodiment of the method according to the invention.
La figure 4 est un schéma détaillé d'un mode de réalisation d'un dispositif d'actionnement.Figure 4 is a detailed diagram of an embodiment of an actuator.
Les figures 5 à 7 sont des schémas détaillés de différentes variantes de réalisation d'un actionneur.Figures 5 to 7 are detailed diagrams of different embodiments of an actuator.
La figure 8 est un schéma représentant les compatibilités de l'unité d'actionnement selon l'invention.Figure 8 is a diagram showing the compatibilities of the actuating unit according to the invention.
Un actionneur 1 est représenté de manière schématique à la figure 1. Il comprend principalement une interface de commande 7 et une unité d'actionnement 2 comprenant une unité électronique de commande 5 et un moteur 4. L'unité d'actionnement est liée mécaniquement, éventuellement par le biais d'un réducteur, à un élément mobile 3 de fermeture d'occultation ou de protection solaire ou un écran de projection afin d'entraîner le déplacement de celui-ci. L'élément mobile 3 peut notamment consister en un volet roulant, en un store ou en une porte. L'unité électronique de commande 5 est liée au moteur 4, elle assure le pilotage des mouvements de celui-ci par le biais de son alimentation. L'unité électronique de commande comprend une mémoire 6, et a en outre pour fonction de déterminer la position dans laquelle l'élément mobile 3 se trouve à chaque instant. L'unité d'actionnement peut comprendre à cet effet un dispositif de comptage associé à un capteur de type à effet Hall ou de type optoélectronique par exemple.An actuator 1 is shown schematically in FIG. 1. It mainly comprises a
Pour permettre à un utilisateur de commander les mouvements de l'élément mobile, celui-ci dispose d'une interface de commande 7. Cette interface a la forme d'un boîtier muni de deux touches de commande. Dans un premier mode de commande A du dispositif d'actionnement, une touche 8a permet de commander le mouvement de l'élément mobile dans un premier sens, par exemple la montée, et une touche 8b permet de commander le mouvement de l'élément mobile dans un deuxième sens, par exemple la descente.To allow a user to control the movements of the mobile element, it has a
Un appui sur l'une des touches de commande provoque en effet l'envoi d'un ordre de commande vers l'unité électronique de commande, qui pilote en conséquence une rotation du moteur dans le sens correspondant à l'ordre de commande et finalement le déplacement de l'élément mobile 3.Pressing one of the control keys causes the sending of a command command to the electronic control unit, which consequently drives a rotation of the motor in the direction corresponding to the command order and finally moving the
L'interface de commande 7 est reliée à une source de tension électrique, telle que le secteur alternatif 230 Volts, au moyen de deux fils. Elle est également reliée par l'intermédiaire de trois fils à l'unité d'actionnement et plus particulièrement à l'unité électronique de commande 5. Ces fils permettent de transmettre à l'unité d'actionnement non seulement des ordres de commande mais également l'énergie électrique nécessaire à l'alimentation de l'unité électronique de commande 5 et du moteur 4.The
Le circuit électrique d'un tel actionneur est représenté plus en détail à la figure 4. L'interface de commande 7 est reliée à la source de tension électrique par deux fils Ph et N. Sur le fil Ph portant la phase, deux contacts S1 et S2 sont branchés en parallèle. Ils sont reliés mécaniquement aux touches 8a ou 8b et sont, au repos, normalement ouverts. En aval, ces contacts S1 et S2 sont respectivement connectés à deux fils conducteurs PH1 et PH2 reliés à l'unité électronique de commande 5. Un fil N portant le neutre, traverse l'interface de commande et est connecté à l'unité électronique de commande. Un appui sur la touche 8a provoque la fermeture du contact S1 et un appui sur la touche 8b la fermeture du contact S2.The electric circuit of such an actuator is shown in more detail in FIG. 4. The
L'unité électronique de commande 5 comprend principalement un microcontrôleur 9. Il est alimenté à travers des dispositifs de redressement et de régulation 10a, 10b par les tensions existant entre le fil N et l'un des deux fils PH1 et PH2 attaquant l'unité électronique.The
Les deux fils PH1 et PH2 attaquant l'unité électronique peuvent être connectés alternativement à un fil d'alimentation PHM du moteur grâce à un module de gestion de l'alimentation PM comprenant un relais bistable T. Ce fil PHM peut alimenter via un interrupteur commandé RL1 un premier bobinage W1 du moteur en parallèle avec un montage en série d'un deuxième bobinage W2 du moteur et d'un condensateur CM pour faire tourner le moteur dans un premier sens et peut alimenter via un interrupteur commandé RL2 le deuxième bobinage W2 du moteur en parallèle avec un montage en série du premier bobinage W1 du moteur et du condensateur CM pour faire tourner le moteur dans un deuxième sens. Les interrupteurs commandés RL1 et RL2 peuvent être constitués de transistors de puissance ou de relais. Les états du relais bistable T et des interrupteurs commandés RL1 et RL2 sont commandés par des sorties du microcontrôleur 9. Grâce au module de gestion PM, lorsque le seul contact S1 est fermé, le moteur peut être alimenté pour tourner dans un sens ou dans l'autre par l'intermédiaire du relais bistable T et d'un des interrupteurs commandés RL1 ou RL2.The two PH1 and PH2 son attacking the electronic unit can be alternately connected to a motor PHM supply wire through a power management module PM comprising a bistable relay T. This PHM wire can supply via a controlled switch RL1 a first winding W1 of the motor in parallel with a series connection a second winding W2 of the motor and a capacitor CM for rotating the motor in a first direction and can supply via a controlled switch RL2 the second winding W2 of the motor in parallel with a series connection of the first winding W1 of the motor and capacitor CM to rotate the motor in a second direction. The controlled switches RL1 and RL2 may consist of power transistors or relays. The states of the bistable relay T and the controlled switches RL1 and RL2 are controlled by outputs of the
Le microcontrôleur comprend des moyens (par exemple des comparateurs) pour déterminer les tensions disponibles sur les lignes PH1 et PH2. En fonction de cette information, il commande par l'intermédiaire de ses sorties les états du relais bistable T et des interrupteurs commandés RL1 et RL2.The microcontroller comprises means (for example comparators) for determining the voltages available on lines PH1 and PH2. On the basis of this information, it controls via its outputs the states of the bistable relay T and the controlled switches RL1 and RL2.
L'interface de commande 7 peut également communiquer avec l'unité électronique de commande 5 par le biais d'ondes radioélectriques. Dans ces cas, le boîtier de commande 7 et l'unité électronique de commande 5 comprennent respectivement au moins un émetteur et un récepteur d'ondes radioélectriques.The
Un premier mode d'exécution du procédé selon l'invention est représenté par l'ordinogramme de la figure 2. Dans cet ordinogramme, ce premier mode d'exécution est appliqué à une procédure de configuration d'une position de fin de course.A first embodiment of the method according to the invention is represented by the flow chart of FIG. 2. In this flow chart, this first execution mode is applied to a configuration procedure of an end-of-travel position.
On suppose que l'actionneur se trouve initialement dans un mode de fonctionnement appelé « mode de commande A » et dans lequel un appui sur la touche 8a de l'interface de commande provoque un mouvement du moteur ayant pour conséquence un déplacement vers le haut de l'élément mobile et dans lequel un appui sur la touche 8b de l'interface de commande provoque un mouvement du moteur ayant pour conséquence un déplacement vers le bas de l'élément mobile.It is assumed that the actuator is initially in an operating mode called "control mode A" and in which a pressing on the key 8a of the control interface causes a movement of the motor resulting in a displacement upward of the movable element and wherein pressing the key 8b of the control interface causes a movement of the motor resulting in a downward movement of the movable member.
Suite à une séquence d'appuis particulière sur les touches 8a et 8b de l'interface de commande 7, l'actionneur bascule, lors d'une étape 100, dans un deuxième mode de fonctionnement, appelé « mode de configuration ». Dans le mode de configuration, les fonctions des touches de commande 8a et 8b sont modifiées par rapport à celles du mode de commande A. Par exemple, une ergonomie telle que décrite dans le document EP 0 822 315 aux lignes 4 à 10 de la colonne 5 ou dans le document US 6,078,159 à la revendication 1 entraîne le basculement du mode de commande au mode de configuration. Le basculement dans le mode de configuration peut également être exécuté suite à une première mise sous tension, une séquence de coupure de l'alimentation secteur, un court-circuit entre les deux lignes de phase ou toute autre ergonomie d'appuis sur les touches.Following a particular sequence of presses on the
Dans le mode de configuration, une des touches, par exemple la touche 8a, assure la commande des mouvements du moteur tandis que l'autre touche, par exemple la touche 8b assure une fonction de validation de réglage. La commande des mouvements du moteur est alors séquentielle : un premier appui sur la touche 8a entraîne un mouvement de montée de l'élément mobile, un deuxième appui sur la touche 8a entraîne un arrêt du mouvement de l'élément mobile, un troisième appui sur la touche 8a entraîne un mouvement de descente de l'élément mobile, un quatrième appui sur la touche 8a entraîne un arrêt du mouvement de l'élément mobile, un cinquième appui sur la touche 8a entraîne un mouvement de montée de l'élément mobile, etc...In the configuration mode, one of the keys, for example the key 8a, provides control of the motions of the motor while the other key, for example the key 8b provides a function of setting enable. The control of the motions of the motor is then sequential: a first pressing on the key 8a causes a movement of rise of the movable element, a second pressing on the key 8a causes a stop of the movement of the movable element, a third press on the key 8a causes a movement of descent of the movable element, a fourth pressing of the key 8a causes a stop of the movement of the movable element, a fifth pressing of the key 8a causes a rising movement of the movable element, etc.
Le mouvement peut également n'être commandé que tant qu'une action est exercée sur la touche 8a. Ainsi, un premier appui sur la touche 8a entraîne un mouvement de montée de l'élément mobile tant que cet appui est maintenu. Le relâchement de cet appui entraîne l'arrêt de l'élément mobile. Un deuxième appui sur la touche 8a entraîne un mouvement de descente de l'élément mobile tant que cet appui est maintenu. Le relâchement de cet appui entraîne l'arrêt de l'élément mobile. Un troisième appui sur la touche 8a entraîne un mouvement de montée de l'élément mobile tant que cet appui est maintenu. Le relâchement de cet appui entraîne l'arrêt de l'élément mobile, etc...The movement can also be controlled only as long as an action is exerted on the key 8a. Thus, a first pressing of the key 8a causes a rising movement of the movable element as long as this support is maintained. Releasing this support causes the stopping of the movable element. A second pressing of the key 8a causes a movement of descent of the movable element as long as this support is maintained. Releasing this support causes the stopping of the movable element. A third pressing of the key 8a causes a rising movement of the movable element as long as this support is maintained. The release of this support causes the stopping of the movable element, etc ...
Grâce aux fonctions de cette touche 8a, il est possible de déplacer l'élément mobile dans le mode de configuration, vers une position particulière à enregistrer par exemple ou vers une position à modifier.Thanks to the functions of this key 8a, it is possible to move the movable element in the configuration mode, to a particular position to be recorded for example or to a position to be modified.
Dans une étape 110, l'élément mobile est donc déplacé vers une position particulière par appui sur la touche 8a. Des ajustements fins de cette position particulière sont possibles par le biais d'appuis successifs sur la touche 8a commandant séquentiellement des mouvements d'allers et retours de l'élément mobile.In a
Une fois que la position de l'élément mobile convient à l'installateur, celui-ci la valide dans une étape 120 par un appui sur la touche 8b.Once the position of the movable member is suitable for the installer, it validates it in a
Dans une étape 130, on teste si la durée d'appui sur la touche 8b est égale ou réputée être égale à deux secondes. Si tel n'est pas le cas, on passe à une étape 170 dans laquelle d'autres tests sont réalisés et où, en fonction des résultats de ces tests, on met fin à la procédure de configuration en cours ou on sort du mode de configuration.In a
Si la durée d'appui sur la touche 8b est égale ou réputée être égale à deux secondes, on teste, dans une étape 140, si la position validée correspond à une position déjà enregistrée. Si tel est le cas, on efface dans une étape 160 la position enregistrée et on retourne à l'étape 110.If the duration of pressing the key 8b is equal to or deemed to be equal to two seconds, it is tested, in a
Par contre, si la position validée ne correspond pas à une position déjà enregistrée, on enregistre dans une étape 150 la position validée.On the other hand, if the validated position does not correspond to a position already recorded, the position validated is recorded in a
Il est possible ensuite d'enregistrer une autre position de fin de course ou une autre position particulière en répétant les opérations décrites ci-dessus.It is then possible to record another end position or another particular position by repeating the operations described above.
La détection des positions de fin de course peut également être réalisée automatiquement si l'actionneur présente des moyens électroniques le permettant.Detection of the end positions can also be performed automatically if the actuator has electronic means permitting.
Préférablement, à l'étape 150, un retour d'information visuel peut être prévu, par exemple par léger mouvement aller-retour de l'élément mobile, pour signaler à l'installateur l'enregistrement d'une position.Preferably, in
Une fois les différents paramètres de l'actionneur réglés, l'installateur provoque la sortie du mode de configuration et le retour dans le mode de commande A à une étape 160 par un appui sur la touche 8b. Les touches 8a et 8b reprennent alors leurs fonctions initiales de commande de mouvements de montée et de descente.Once the various parameters of the actuator have been set, the installer causes the output of the configuration mode and the return to the command mode A at a
Le tableau de la figure 3 résume un exemple d'actions permettant d'effectuer les réglages de configuration de l'actionneur.The table in Figure 3 summarizes an example of actions to perform the configuration settings of the actuator.
Les positions de fin de course désirées sont atteintes grâce à des appuis sur la touche 8a comme décrit précédemment. Elles sont ensuite enregistrées par un appui d'une durée de deux secondes sur la touche 8b ayant dans ce mode une fonction de validation. En pratique, un appui sur une touche d'une durée supérieure à une seconde et inférieure à 3,5 secondes est réputé être un appui de deux secondes sur cette touche.The desired end positions are reached by pressing the key 8a as described above. They are then recorded by pressing for two seconds the key 8b having in this mode a validation function. In practice, pressing a key longer than one second and less than 3.5 seconds is deemed to be a two-second press on this key.
Une ou plusieurs positions intermédiaires de l'élément mobile peuvent être définies de la même manière, éventuellement à partir du moment où les positions de fin de course ont été préalablement enregistrées.One or more intermediate positions of the movable element can be defined in the same way, possibly from the moment when the end positions have been previously recorded.
Dans le mode de commande A, des ergonomies spécifiques d'actions sur les touches seront définies pour amener l'élément mobile dans cette ou ces positions intermédiaires.In the control mode A, specific ergonomics of actions on the keys will be defined to bring the movable element in this or these intermediate positions.
Pour effectuer un re-réglage des positions de fin de course et de la ou des positions intermédiaires, il suffit à l'installateur de commander le déplacement de l'élément mobile jusqu'à la fin de course à modifier, puis par une séquence d'appuis sur la touche de validation (ou les deux touches du boîtier de commande), d'effacer l'enregistrement de cette position.To re-adjust the end positions and the intermediate position or positions, it is sufficient for the installer to control the movement of the movable element to the end of the race to be modified, then by a sequence of press the validation button (or both buttons on the control box), to erase the recording from this position.
II convient ensuite d'enregistrer à nouveau une position de fin de course plus adaptée, en utilisant les fonctionnalités de commande et de validation des deux touches.It is then necessary to record again a more suitable end position, using the control and validation functions of the two keys.
Pour effectuer une remise à zéro des réglages de l'actionneur, il faut effectuer une séquence d'appuis sur la touche de validation 8b. Cette séquence est par exemple définie par trois appuis successifs d'une durée de deux secondes. Suite à cette séquence tous les enregistrements et réglages sont effacés.To reset the actuator settings, a sequence of presses must be performed on the
D'autres opérations de configuration peuvent également être mises en oeuvre, comme par exemple l'apprentissage du sens de rotation du moteur devant être commandé, dans le mode de commande A, par la touche 8a et du sens de rotation du moteur devant être commandé par la touche 8b. Cette opération est nécessaire dans certains cas si la gestion des fins de course est différente lorsque l'élément mobile approche son point haut ou son point bas. L'actionneur pouvant être monté à gauche ou à droite par rapport à l'ouverture, il doit apprendre à quel sens de rotation du moteur correspond le mouvement d'ouverture ou de fermeture de l'élément mobile qu'il pilote. Cet apprentissage peut consister simplement à imposer de régler une fin de course, haute ou basse, en premier, mais d'autres ergonomies peuvent être prévues. Par exemple, l'utilisateur peut positionner l'élément mobile à mi-course (éloigné des fins de course, qu'elles soient réglées préalablement ou non) par une séquence d'appuis sur la touche 8a en prenant soin de terminer la séquence de positionnement par un mouvement dans un sens imposé, par exemple un mouvement de l'élément mobile vers le haut. Il valide ensuite ce dernier mouvement par un appui sur la touche de validation 8b pendant un temps déterminé, qui peut être plus long ou plus court qu'un appui validant une position de fin de course. Par exemple, un appui de validation de sens de rotation du moteur durera cinq secondes. En pratique, un appui d'une durée supérieure à 3,5 secondes et inférieure à 7 secondes sera réputé être un appui de cinq secondes.Other configuration operations can also be implemented, such as for example the learning of the direction of rotation of the motor to be controlled, in the control mode A, by the key 8a and the direction of rotation of the motor to be controlled. by the key 8b. This operation is necessary in certain cases if the management of the limit switches is different when the moving element approaches its high point or its low point. The actuator can be mounted to the left or right relative to the opening, it must learn which direction of rotation of the motor corresponds to the opening or closing movement of the movable element that it controls. This learning may consist of simply imposing a limit switch, high or low, first, but other ergonomics can be provided. For example, the user can position the mobile element halfway (away from the limit switches, whether pre-adjusted or not) by a sequence of presses on the key 8a, taking care to complete the sequence of positioning by a movement in an imposed direction, for example a movement of the movable element upwards. It then validates this last movement by pressing the
Ainsi, différentes opérations de validation peuvent par exemple être mises en oeuvre selon la durée et/ou le nombre d'appuis sur la touche de validation.Thus, different validation operations may for example be implemented according to the duration and / or the number of presses on the validation key.
La sortie du mode de configuration peut également être réalisée par un appui prolongé sur la touche de validation. Par exemple, un appui de sortie du mode de configuration durera dix secondes. En pratique, un appui d'une durée supérieure à 7 secondes et inférieure à 13 secondes sera réputé être un appui de dix secondes.The output of the configuration mode can also be done by pressing and holding the confirmation key. For example, a setup mode exit press will last ten seconds. In practice, a support longer than 7 seconds and less than 13 seconds will be deemed to be a ten-second press.
Dans la mesure où une même touche sert à la commande des deux sens de mouvement du moteur, le réglage d'un sens de rotation n'est pas commode. Il est possible de régler en premier lieu les fins de course, par des appuis successifs sur la touche 8a, puis de les valider avec la touche 8b. De préférence, une fin de course donnée sera imposée (pour permettre l'apprentissage par le moteur de son sens de rotation). Une fois les positions de fin de course enregistrées, on sort du mode de configuration. Si le sens de déplacement observé ne coïncide pas avec les indications des touches (mouvement vers le haut lors de l'appui sur la touche 8b devant entraîner un mouvement de descente de l'élément mobile), une ergonomie particulière, par exemple sur une position de fin de course, permet alors de modifier le sens de déplacement de l'élément mobile associé à chacune des touches.Since the same key is used to control the two directions of movement of the motor, setting a direction of rotation is not convenient. It is possible to set the limit switches first, by successive presses on the key 8a, then to validate them with the key 8b. Preferably, a given end of travel will be imposed (to allow learning by the motor of its direction of rotation). Once the end positions have been saved, you exit the configuration mode. If the direction of movement observed does not coincide with the indications of the keys (upward movement when pressing the key 8b to cause a movement of descent of the movable element), a particular ergonomics, for example on a position end of stroke, then allows to change the direction of movement of the movable element associated with each of the keys.
Contrairement à ce qui a été décrit précédemment, il n'est pas nécessaire d'allouer de manière fixe une touche particulière pour la fonction déplacement et l'autre touche pour la fonction validation. Cette allocation peut être dynamique, c'est-à-dire qu'elle peut être faite logiquement en fonction de certains paramètres tels que, par exemple, la touche sur laquelle le premier appui intervient dans le mode de configuration par exemple.Contrary to what has been described above, it is not necessary to allocate one particular key for the moving function and the other key for the validation function. This allocation can be dynamic, that is to say that it can be done logically according to certain parameters such as, for example, the key on which the first support occurs in the configuration mode for example.
Une telle ergonomie de configuration offre une facilité d'emploi appréciable et permet un large panel de réglages possibles.Such configuration ergonomics offers a significant ease of use and allows a wide range of possible settings.
Différentes variantes d'actionneurs sont représentées aux figures 5 à 7. Sur ces figures, l'unité d'actionnement est reliée à d'autres types d'interfaces de commande grâce auxquelles, dans des modes de commande comme dans des modes de configuration les mouvements de l'élément mobile sont commandés exclusivement par des actions sur une seule touche de commande.Various variants of actuators are shown in FIGS. 5 to 7. In these figures, the actuating unit is connected to other types of control interfaces thanks to which, in control modes as in configuration modes, the movements of the movable element are controlled exclusively by actions on a single control key.
Une première variante d'actionneur représenté à la figure 5 diffère de l'actionneur décrit en référence à la figure 4 en ce que le contact S2 de l'interface de commande 7' est court-circuité par un shunt SH. L'interface de commande 7' est à l'origine identique à l'interface de commande 7 permettant habituellement de commander respectivement par action sur les touches 8a et 8b, les mouvements du moteur dans un premier sens et dans un deuxième sens. Celle-ci a simplement été modifiée par l'ajout d'un shunt SH pour présenter d'autres fonctionnalités une fois associée à l'unité électronique de commande 5.A first actuator variant shown in FIG. 5 differs from the actuator described with reference to FIG. 4 in that the contact S2 of the control interface 7 'is short-circuited by a shunt SH. The control interface 7 'is originally identical to the
Le shunt SH permet à l'unité électronique de commande 5 et, en particulier, au microcontrôleur 9 d'être alimentés en permanence par le fil de phase PH2. Ainsi, l'unité électronique de commande est capable de mesurer des durées d'ouverture du contact S1 de même que des durées de fermeture de ce contact. Ceci permet d'associer, aussi bien dans un deuxième mode de commande B que dans le mode de configuration, à la touche 8a liée au contact S1, un grand nombre de fonctions autres que les fonctions de commande séquentielle des mouvements du moteur. Ceci permet de plus d'alimenter un dispositif de réception d'ordres radioélectriques communiquant avec des dispositifs automatiques de mesure (par exemple de mesure de vent ou de luminosité) qui sont susceptibles de commander un mouvement du moteur pour déplacer l'élément mobile sans qu'il soit nécessaire d'exercer une action sur l'interface de commande 7'.SH shunt allows the
Dans cette variante, aucune fonction n'est associée à un appui sur la touche 8b liée au contact S2 et, dans le mode de commande B, les mouvements du moteur sont commandés, par exemple séquentiellement, par appuis successifs sur la touche 8a liée au contact S1. Dans ce cas, il est possible de supprimer l'accès à la touche 8b en utilisant un plastron d'interface de commande ne comprenant qu'une ouverture permettant d'appuyer sur la touche 8a.In this variant, no function is associated with a pressing of the key 8b linked to the contact S2 and, in the control mode B, the motions of the motor are controlled, for example sequentially, by successive presses on the key 8a linked to the contact S1. In this case, it is possible to suppress access to the key 8b by using a control interface panel having only one opening to press the key 8a.
Ainsi donc, une même unité d'actionnement peut être utilisée pour constituer :
- soit un actionneur commandé de manière habituelle en appliquant la tension du conducteur de phase Ph soit à la première borne PH1 pour un premier sens de rotation, soit à la deuxième borne PH2 pour un deuxième sens de rotation,
- soit un actionneur dans lequel dans le mode de configuration comme dans le mode de commande B la deuxième borne PH2 est normalement alimentée en permanence, tandis que les commandes sont transmises par la première borne PH1.
- either an actuator controlled in the usual way by applying the voltage of the phase conductor Ph either to the first terminal PH1 for a first direction of rotation, or to the second terminal PH2 for a second direction of rotation,
- or an actuator in which in the configuration mode as in the control mode B the second terminal PH2 is normally supplied continuously, while the commands are transmitted by the first terminal PH1.
Cette compatibilité de l'unité d'actionnement selon l'invention est illustrée à la figure 8 sur laquelle sont représentés les différents modes de fonctionnement d'un actionneur et les conditions d'utilisation de ceux-ci.This compatibility of the actuating unit according to the invention is illustrated in FIG. 8 on which are represented the various operating modes of an actuator and the conditions of use thereof.
Lorsqu'un installateur retire le shunt, les actions sur la touche 8b liée au contact S2 peuvent de nouveau être identifiées par le microcontrôleur 9. Les appuis ou les successions d'appui sur la touche 8b peuvent alors être associées à diverses fonctions notamment des fonctions utilisées dans un mode de configuration de l'actionneur telles que des ordres de basculement d'un mode de fonctionnement à un autre ou de validation de réglage.When an installer removes the shunt, the actions on the key 8b linked to the contact S2 can again be identified by the
Dans une deuxième variante d'actionneur représentée à la figure 6, l'interface de commande 7 a été modifiée par le remplacement du contact à fermeture S2 par un contact à ouverture S2" pour constituer l'interface de commande 7". Le fonctionnement d'un tel actionneur est similaire à celui décrit précédemment. Simplement, grâce à cet actionneur les opérations de configuration sont simplifiées. En effet, plutôt que de devoir mettre en place ou retirer un shunt, il suffit dans cette variante d'appuyer sur la touche 8b ou de la relâcher. Cette touche peut n'être accessible que lorsqu'un carter de l'interface de commande a été déposé.In a second variant of the actuator shown in FIG. 6, the
On peut alors distinguer des ordres engendrés par appui unique sur la touche 8a, en distinguant éventuellement des temps d'appuis et de repos, puisque l'unité électronique de commande est alimentée. On peut également distinguer des ordres engendrés par l'appui simultané sur les deux touches 8a et 8b. L'unité électronique de commande étant alors alimentée par la ligne de phase PH1, on peut également mesurer la durée de cet appui simultané.We can then distinguish orders generated by single support on the key 8a, possibly distinguishing times of support and rest, since the electronic control unit is powered. We can also distinguish orders generated by the simultaneous support on the two
La touche 8b peut également être utilisée pour faire passer l'actionneur dans un mode de configuration. Par exemple, on peut grâce à cette touche simuler une séquence de coupure d'alimentation, une alimentation provisoire de l'unité électronique de commande étant assurée par une décharge de condensateur ou par un appui sur la touche 8a.Key 8b can also be used to move the actuator into a configuration mode. For example, it is possible with this key to simulate a power cut sequence, a temporary power supply of the electronic control unit being provided by a capacitor discharge or by pressing the key 8a.
Dans une troisième variante d'actionneur représentée à la figure 7, l'interface de commande 7 a été modifiée par le remplacement du contact à fermeture S2 par un poussoir à deux positions fixes S2''' pour constituer l'interface de commande 7'''.In a third actuator variant shown in FIG. 7, the
Grâce à ce poussoir, le fonctionnement de la touche 8b est séquentiel en ce qui concerne l'alimentation : un premier appui permet l'alimentation de l'actionneur, un deuxième appui la coupe. Ce fonctionnement nécessite de préférence des moyens de retour d'information visuels pour savoir dans quel état est l'interrupteur d'alimentation.With this button, the operation of the key 8b is sequential with respect to the power supply: a first support allows the power supply of the actuator, a second support the cut. This operation preferably requires visual feedback means to know what state is the power switch.
Dans ces deux dernières variantes, il est par exemple possible de provoquer des séquences de type coupure d'alimentation de l'unité électronique de commande par la deuxième ligne de phase PH2 directement par l'action sur la touche 8b, de manière à changer de mode de fonctionnement.In the latter two variants, it is for example possible to cause power-off type sequences of the electronic control unit by the second phase line PH2 directly by the action on the key 8b, so as to change the operating mode.
En complément des coupures d'alimentation par la deuxième ligne de phase PH2, il est possible de reproduire des séquences particulières par des appuis sur la première touche 8a qui provoquent une alimentation de l'unité électronique 5. Dans ce cas, la ligne de phase PH1 est reliée aux interrupteurs commandés RL1 et RL2 par l'intermédiaire du relais T.In addition to the power cuts by the second phase line PH2, it is possible to reproduce particular sequences by pressing on the first key 8a which cause a supply of the
Les programmes de fonctionnement de l'unité d'actionnement utilisés sont différents selon que l'unité d'actionnement est reliée à une interface décrite en référence à la figure 4 ou à l'une des interface décrites en référence aux figures 5 à 7. Ces programmes peuvent cependant être contenus dans une même unité électronique de commande. Dans ce cas des moyens mécaniques et/ou électroniques permettent la sélection manuelle ou automatique du programme de fonctionnement adapté à l'actionneur et, en particulier, adapté à l'interface de commande de cet actionneur.The operating programs of the operating unit used are different depending on whether the operating unit is connected to an interface described with reference to FIG. 4 or to one of the interfaces described with reference to FIGS. 5 to 7. These programs can however be contained in the same electronic control unit. In this case, mechanical and / or electronic means allow the manual or automatic selection of the operating program adapted to the actuator and, in particular, adapted to the control interface of this actuator.
Claims (17)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0408799A FR2874229B1 (en) | 2004-08-10 | 2004-08-10 | METHOD OF OPERATING A CONTROLLED AND POWERED ROLLING SHUTTER THROUGH A WIRED CONTROL INTERFACE |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1626154A1 true EP1626154A1 (en) | 2006-02-15 |
| EP1626154B1 EP1626154B1 (en) | 2007-10-17 |
Family
ID=34948259
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP05016377A Active EP1626154B1 (en) | 2004-08-10 | 2005-07-28 | Method of operating a rollerblind, controlled and powered through a wire control interface |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US7129662B2 (en) |
| EP (1) | EP1626154B1 (en) |
| JP (1) | JP4842586B2 (en) |
| CN (1) | CN1734050B (en) |
| AT (1) | ATE376115T1 (en) |
| CA (1) | CA2512764C (en) |
| DE (1) | DE602005002889T2 (en) |
| ES (1) | ES2253143T3 (en) |
| FR (1) | FR2874229B1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2918818A1 (en) * | 2007-07-13 | 2009-01-16 | Deprat Jean Sa Sa | Inverter device i.e. interrupter type inverter device, for electrically controlling raised/descended final position of roller-blind motor, has short-circuiting unit generating short-circuit to transmit information to control motor |
| EP2098677A1 (en) * | 2008-03-06 | 2009-09-09 | Deprat Jean SA | Method of controlling a device for closing and opening a door with wired control |
| WO2010122513A1 (en) * | 2009-04-22 | 2010-10-28 | Somfy Sas | Power supply with adapted output voltage |
| EP2554776A1 (en) | 2011-08-04 | 2013-02-06 | Somfy SAS | Method of learning for a particular position of an electric actuator for operating home automation equipment. |
| FR2983617A1 (en) * | 2011-12-06 | 2013-06-07 | Somfy Sas | METHOD OF OPERATING A POWER AND COMMUNICATION ENTITY AND ACTUATOR TO BE PART OF A DOMOTIC SYSTEM |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20060232234A1 (en) | 2005-04-01 | 2006-10-19 | Newman Robert C Jr | Motorized roller tube system having dual-mode operation |
| US20060232233A1 (en) * | 2005-04-01 | 2006-10-19 | Adams Jason O | Drive assembly for a motorized roller tube system |
| TW200727072A (en) * | 2006-01-12 | 2007-07-16 | Coretronic Corp | Electric screen |
| ITMI20060409A1 (en) * | 2006-03-07 | 2007-09-08 | Nice Spa | TADIORICEVITOR SYSTEM AND RADIOTRECTOR FOR AUTOMATED RADIO-CONTROLLED APEERTURE-CLOSING SYSTEMS |
| US20080262637A1 (en) * | 2007-04-20 | 2008-10-23 | David M. Dorrough | Control for a motorized blind |
| FR2922385A1 (en) * | 2007-10-16 | 2009-04-17 | Somfy Sas | METHOD FOR ANALYZING THE OPERATION OF AN ELECTROMECHANICAL ACTUATOR FOR THE MOTORIZED MANEUVER OF A SCREEN AND ACTUATOR FOR ITS IMPLEMENTATION |
| FR2925932B1 (en) * | 2007-12-26 | 2011-08-26 | Somfy Sas | METHOD FOR ADJUSTING A MOTORIZED SOLAR PROTECTION SYSTEM NOT COMPRISING A FRONT STOP. |
| GB0810784D0 (en) * | 2008-06-12 | 2008-07-23 | Cooper Fire Ltd | Brake arrangement |
| DE102009007681B4 (en) * | 2009-02-05 | 2011-01-27 | Roma Rolladensysteme Gmbh | Control device of a closing device for a wall opening of a building or vehicle |
| JP5909373B2 (en) * | 2012-01-31 | 2016-04-26 | 三和シヤッター工業株式会社 | Apparatus and method for setting upper limit position / lower limit position in initial setting mode of shutter device |
| DE102013000396A1 (en) * | 2013-01-11 | 2014-07-17 | ScreenTronic GmbH | Window treatment |
| DE102013000397A1 (en) * | 2013-01-11 | 2014-07-17 | ScreenTronic GmbH | Window treatment |
| US9725951B2 (en) * | 2014-06-27 | 2017-08-08 | SILVAIR Sp. z o.o. | Motorized system with position calibration, circuit protection and detection of motor stoppage |
| FR3035144B1 (en) * | 2015-04-15 | 2017-05-05 | Simu | MOTORIZED DRIVE DEVICE FOR A DOMOTIC CLOSURE OR SOLAR PROTECTION INSTALLATION, ASSOCIATED DOMOTIC INSTALLATION AND METHOD FOR CONTROLLING THE OPERATION OF SUCH A DEVICE |
| CN106357167A (en) * | 2016-09-13 | 2017-01-25 | 武汉百络优物联科技有限公司 | Curtain motor control system |
| EP3709638B1 (en) * | 2019-03-13 | 2023-08-30 | L'oreal | System and method for projecting digital content onto user's facial surface |
| JP7377112B2 (en) * | 2020-01-09 | 2023-11-09 | 株式会社ニチベイ | Control device, control system and control method |
| JP7525305B2 (en) * | 2020-06-02 | 2024-07-30 | ナブテスコ株式会社 | Automatic door device, voice guidance device, guidance system, and guidance method |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0426577A1 (en) * | 1989-11-03 | 1991-05-08 | Société Anonyme SIMU | Method and device for moving a shade element to adjustable stable positions and installation applying such |
| DE19831119A1 (en) * | 1998-07-11 | 2000-01-20 | Bosch Gmbh Robert | Garage door drive with electric drive motor which can be operated by programmable electronic control device has electronic control device with only one operating switch and programming switch plus additional operating/programming functions |
| EP0997605A1 (en) * | 1998-10-29 | 2000-05-03 | DEPRAT Jean S.A. | Method and device for controlling one or more apparatuses, especially a bi-directionnaly rotatable roller shutter drum |
| FR2808834A1 (en) * | 2000-05-12 | 2001-11-16 | Four Group M | Control of motorized doors or shutters, uses time of connection in programming mode to select one from a number of predefined stored menus |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5467266A (en) * | 1991-09-03 | 1995-11-14 | Lutron Electronics Co., Inc. | Motor-operated window cover |
| JPH0771167A (en) * | 1993-09-03 | 1995-03-14 | S Ii Kogyo Kk | Panel system |
| JPH07158339A (en) * | 1993-12-09 | 1995-06-20 | Niles Parts Co Ltd | Opening and closing device for window glass for behicle |
| FR2728615A1 (en) | 1994-12-23 | 1996-06-28 | Bubendorff Eric | DEVICE FOR CONTROLLING THE OPENING AND CLOSURE OF MOTORIZED OCCULTATION MEANS, ESPECIALLY OF ROLLING SHUTTERS |
| DE19630491C1 (en) | 1996-07-29 | 1998-02-05 | Selve Ernst Gmbh Co Kg | Circuit arrangement for controlling electromotive drives for curtains that can be wound up and unwound |
| US6078159A (en) * | 1999-02-17 | 2000-06-20 | The Chamberlain Group, Inc. | Method and apparatus for programming a logic board from switching power |
| JP3057080B1 (en) * | 1999-03-29 | 2000-06-26 | 新生精機株式会社 | Electric screen control device |
| FR2811431B1 (en) * | 2000-07-07 | 2002-10-11 | Somfy | MOTION DETECTION DEVICE AND SAFETY DEVICE FOR ARM BLIND |
| DE10113318C1 (en) * | 2001-03-20 | 2002-08-29 | Conti Temic Microelectronic | Method for operating the electric windows of a motor vehicle |
| JP3909473B2 (en) * | 2002-09-13 | 2007-04-25 | 東洋電装株式会社 | Power window control device |
| US6914201B2 (en) * | 2003-11-26 | 2005-07-05 | Methode Electronics, Inc. | Multiple detent switch |
| DE202004002259U1 (en) * | 2004-02-09 | 2004-05-27 | Vandreike, Bertram | Facade element for building with segmented surface displaceable relative to plane of facade to provide surface for projected light or image or to angle segments to allow in daylight |
-
2004
- 2004-08-10 FR FR0408799A patent/FR2874229B1/en not_active Expired - Fee Related
-
2005
- 2005-07-21 CA CA2512764A patent/CA2512764C/en not_active Expired - Fee Related
- 2005-07-28 DE DE602005002889T patent/DE602005002889T2/en active Active
- 2005-07-28 ES ES05016377T patent/ES2253143T3/en active Active
- 2005-07-28 EP EP05016377A patent/EP1626154B1/en active Active
- 2005-07-28 AT AT05016377T patent/ATE376115T1/en active
- 2005-08-03 US US11/195,969 patent/US7129662B2/en not_active Expired - Fee Related
- 2005-08-09 CN CN200510091174.4A patent/CN1734050B/en not_active Expired - Fee Related
- 2005-08-10 JP JP2005232377A patent/JP4842586B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0426577A1 (en) * | 1989-11-03 | 1991-05-08 | Société Anonyme SIMU | Method and device for moving a shade element to adjustable stable positions and installation applying such |
| DE19831119A1 (en) * | 1998-07-11 | 2000-01-20 | Bosch Gmbh Robert | Garage door drive with electric drive motor which can be operated by programmable electronic control device has electronic control device with only one operating switch and programming switch plus additional operating/programming functions |
| EP0997605A1 (en) * | 1998-10-29 | 2000-05-03 | DEPRAT Jean S.A. | Method and device for controlling one or more apparatuses, especially a bi-directionnaly rotatable roller shutter drum |
| FR2808834A1 (en) * | 2000-05-12 | 2001-11-16 | Four Group M | Control of motorized doors or shutters, uses time of connection in programming mode to select one from a number of predefined stored menus |
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2923101A1 (en) * | 2007-07-13 | 2009-05-01 | Deprat Jean Sa Sa | INVERTER WITH ROLLING SHUTTER ADJUSTMENT TOOL FUNCTION, AND ADJUSTING METHOD |
| FR2918818A1 (en) * | 2007-07-13 | 2009-01-16 | Deprat Jean Sa Sa | Inverter device i.e. interrupter type inverter device, for electrically controlling raised/descended final position of roller-blind motor, has short-circuiting unit generating short-circuit to transmit information to control motor |
| EP2053735A3 (en) * | 2007-07-13 | 2015-12-02 | Deprat Jean SA | Inverter comprising an adjustment tool function for a roller shutter and adjustment method |
| EP2098677A1 (en) * | 2008-03-06 | 2009-09-09 | Deprat Jean SA | Method of controlling a device for closing and opening a door with wired control |
| FR2928400A1 (en) * | 2008-03-06 | 2009-09-11 | Deprat Jean Sa Sa | METHOD FOR CONTROLLING A DEVICE FOR CLOSING AND OPENING A WIRELESS OPENING OPENER |
| US8643322B2 (en) | 2009-04-22 | 2014-02-04 | Somfy Sas | Power supply with adapted output voltage |
| WO2010122513A1 (en) * | 2009-04-22 | 2010-10-28 | Somfy Sas | Power supply with adapted output voltage |
| FR2944927A1 (en) * | 2009-04-22 | 2010-10-29 | Somfy Sas | ADAPTED OUTPUT VOLTAGE POWER SUPPLY |
| EP2554776A1 (en) | 2011-08-04 | 2013-02-06 | Somfy SAS | Method of learning for a particular position of an electric actuator for operating home automation equipment. |
| FR2978789A1 (en) * | 2011-08-04 | 2013-02-08 | Somfy Sas | METHOD FOR LEARNING A PARTICULAR POSITION OF AN ELECTRIC ACTUATOR FOR MANEUVERING DOMOTIC EQUIPMENT |
| WO2013083728A1 (en) * | 2011-12-06 | 2013-06-13 | Somfy Sas | Operating method of a power supply and communication entity and an actuator intended to be part of a home-automation system |
| FR2983617A1 (en) * | 2011-12-06 | 2013-06-07 | Somfy Sas | METHOD OF OPERATING A POWER AND COMMUNICATION ENTITY AND ACTUATOR TO BE PART OF A DOMOTIC SYSTEM |
| US9236831B2 (en) | 2011-12-06 | 2016-01-12 | Somfy Sas | Method of operating a power supply and communication entity and an actuator which are intended to form part of a home-automation system |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2874229A1 (en) | 2006-02-17 |
| CN1734050B (en) | 2012-04-18 |
| US7129662B2 (en) | 2006-10-31 |
| DE602005002889D1 (en) | 2007-11-29 |
| JP2006052639A (en) | 2006-02-23 |
| EP1626154B1 (en) | 2007-10-17 |
| FR2874229B1 (en) | 2006-11-24 |
| JP4842586B2 (en) | 2011-12-21 |
| CA2512764A1 (en) | 2006-02-10 |
| ATE376115T1 (en) | 2007-11-15 |
| CA2512764C (en) | 2013-02-12 |
| CN1734050A (en) | 2006-02-15 |
| US20060033460A1 (en) | 2006-02-16 |
| DE602005002889T2 (en) | 2008-07-24 |
| ES2253143T1 (en) | 2006-06-01 |
| ES2253143T3 (en) | 2008-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1626154B1 (en) | Method of operating a rollerblind, controlled and powered through a wire control interface | |
| EP2009527B1 (en) | Method of configuring a drive system for an enclosure, sun protection or projection screen | |
| EP1659252B1 (en) | Operating process for a motorised system for closure and motorised system for closure comprising hardware and software means for implementing said method | |
| EP0426577B1 (en) | Method and device for moving a shade element to adjustable stable positions and installation applying such | |
| FR2573551A1 (en) | CONTROL DEVICE FOR ROLLING SHUTTER OR THE LIKE WITH ADJUSTABLE BLADES | |
| EP1998239B1 (en) | Method of configuring a control unit for a domestic control system | |
| EP1756388B1 (en) | Operating method for a powered roller shutter, and device for implementing same | |
| EP1710640A1 (en) | Apparatus for configuring a motorized roller blind and methods for manufacturing and operating such an apparatus | |
| EP1779351B1 (en) | Electric roller-shutter actuator comprising a control interface with electric break contacts | |
| EP1160415B1 (en) | Control device for motor driven darkening systems with program selection | |
| EP1788464B1 (en) | Configuration apparatus for domestic actuator | |
| EP1154120B1 (en) | Control for motor driven shading devices with perfected end of course memory | |
| EP2554776B1 (en) | Method of learning for a particular position of an electric actuator for operating home automation equipment. | |
| EP1154121B1 (en) | Perfectioned control for motor driven shading devices | |
| EP1488294B1 (en) | Method of controlling a roller blind or similar | |
| FR3035234B1 (en) | METHOD FOR CONTROLLING THE OPERATION OF A DOMOTIC CLOSURE OR SOLAR PROTECTION INSTALLATION AND ASSOCIATED DOMOTIC INSTALLATION | |
| EP2629274A2 (en) | Operating method of a control cabinet |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| 17P | Request for examination filed |
Effective date: 20060327 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REF | Corresponds to: |
Ref document number: 602005002889 Country of ref document: DE Date of ref document: 20071129 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: BUGNION S.A. |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2253143 Country of ref document: ES Kind code of ref document: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080117 |
|
| GBV | Gb: ep patent (uk) treated as always having been void in accordance with gb section 77(7)/1977 [no translation filed] | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080317 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080117 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080217 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| 26N | No opposition filed |
Effective date: 20080718 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080118 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20080728 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20080418 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20071017 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20130814 Year of fee payment: 9 Ref country code: ES Payment date: 20130716 Year of fee payment: 9 Ref country code: BE Payment date: 20130731 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20140630 Year of fee payment: 10 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20140619 Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140731 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140731 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20150828 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140729 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 376115 Country of ref document: AT Kind code of ref document: T Effective date: 20150728 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20150801 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150801 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150728 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 13 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140731 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 602005002889 Country of ref document: DE Ref country code: DE Ref legal event code: R081 Ref document number: 602005002889 Country of ref document: DE Owner name: SOMFY ACTIVITES SA, FR Free format text: FORMER OWNER: SOMFY SAS, CLUSES, FR |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20220714 Year of fee payment: 18 Ref country code: DE Payment date: 20220628 Year of fee payment: 18 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20230731 Year of fee payment: 19 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 602005002889 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20240201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230728 |