EP1574467B1 - Elevator device - Google Patents
Elevator device Download PDFInfo
- Publication number
- EP1574467B1 EP1574467B1 EP02808158A EP02808158A EP1574467B1 EP 1574467 B1 EP1574467 B1 EP 1574467B1 EP 02808158 A EP02808158 A EP 02808158A EP 02808158 A EP02808158 A EP 02808158A EP 1574467 B1 EP1574467 B1 EP 1574467B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- car
- floor
- landing
- deflector wheel
- main rope
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/34—Details, e.g. call counting devices, data transmission from car to control system, devices giving information to the control system
- B66B1/36—Means for stopping the cars, cages, or skips at predetermined levels
- B66B1/40—Means for stopping the cars, cages, or skips at predetermined levels and for correct levelling at landings
- B66B1/42—Means for stopping the cars, cages, or skips at predetermined levels and for correct levelling at landings separate from the main drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B2009/006—Ganged elevator
Definitions
- the present invention relates to an elevator apparatus As will be described in more detail below, the invention relates more particularly to an elevator apparatus having two cars suspended with 1:1 roping, and more especially to an elevator apparatus provided with a landing correction device for normally landing the two cars at the same time.
- a known elevator apparatus of a 1:1 roping system is constructed such that cars are connected with opposite ends of a main rope, respectively, which is wrapped around a drive sheave and a deflector wheel installed on an upper portion of a hoistway, as shown in Japanese patent application laid-open No. 2001-240343 for example.
- the main rope is caused to travel by driving the drive sheave, the other car lands on the bottom floor.
- the Duo-Lifts adopting the 2:1 roping system, have a complicated structure, and uses the two hydraulic jacks, thus making it impossible to provide cost reduction.
- JP-A-50114862 discloses an elevator apparatus having two cars suspended from opposite ends of rope or cable, the cable passing over a sheave and being guided around a deflector wheel 6d. Furthermore, a landing correction device serves to pivot the rotational axis of the deflector wheel about the rotational axis of the sheave. In this way, the height position of the car suspended from the deflector wheel would be adjusted slightly relative to the height position of the car suspended from the sheave.
- an elevator apparatus comprising a drive unit, a first deflector wheel, a hoistway, a first car, a main rope, a second car, in which a sheave of the drive unit and the deflector wheel are arranged at an upper portion of the hoistway, and the first car is connected with a sheave-side end of the main rope, which is suspended from said sheave and said deflector wheel, whereas the second car is connected with a deflector wheel-side end of said main rope suspended from said sheave and said deflector wheel, so that when one of said cars lands on a top floor, the other car lands on a bottom floor, wherein a fixed deflector wheel and a movable deflector wheel are arranged on a path of said main rope between said sheave and said first deflector wheel, and a landing correction device is provided for moving said movable deflector wheel toward and away from said fixed deflector wheel so as to adjust the length of said main rope between said fixed
- Embodiments of the present invention to be described are intended to obtain an elevator apparatus of a 1:1 roping system which is capable of correcting the landing positions of cars according to an amount of expansion or contraction of a main rope or according to a difference in floor-to-floor distances by the use of a landing correction device, so as to enable both of the cars to land at the same time.
- Fig. 1 is a vertical cross sectional view that schematically shows the construction of a first form of elevator apparatus.
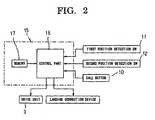
- Fig. 2 is a system diagram of the elevator apparatus.
- Fig. 3 is a flow chart that explains the operation of the elevator apparatus.
- a drive unit 3 and a deflector wheel 4 are installed in a machine room 2 which is constructed at an upper portion of a hoistway 1, with a main rope 5 being extended or wrapped around a sheave 3a of the drive unit 3 and the deflector wheel 4.
- a first car 6 is connected with a sheave-side end of the main rope 5, and a second car 7 is connected with a deflector wheel-side end of the main rope 5. Further, it is constructed such that when one of the first car 6 and the second car 7 lands on the top floor, the other car can land the bottom floor.
- the second car 7 has its chamber or cab 7a mounted on a car frame 7b for vertical movement relative thereto.
- a pantograph structure 8 is arranged between the floor of the cab 7a or the car frame 7b.
- a drive motor 9 for driving the pantograph structure 8 in the vertical movement is mounted on the car frame 7b.
- the pantograph structure 8 and the drive motor 9 together constitute a landing correction device.
- a call button 10 is installed in an elevator hall or landing place of each floor, and a first position detection switch 11 and a second position detection switch 12 are arranged on an inner wall surface of each floor in the hoistway 1. Also, a first position switch operation cam 13 and a second position switch operation cam 14 are arranged on the first car 6 and the second car 7, respectively. Upon landing of the first car 6 and the second car 7, the first position switch operation cam 13 and the second position switch operation cam 14 operate or actuate a first position detection switch 11 and a second position detection switch 12, respectively.
- the second position switch operation cam 14 is moved up and down in association with the vertical movement of the cab 7a with respect to the car frame 7b.
- the main control unit 15 is arranged in the machine room 2, and includes a control part 16 and a memory 17, as shown in Fig. 2 .
- the main control unit 15 drives the first car 6 and the second car 7 to move in the vertical direction.
- the drive motor 9 is controlled to be driven to correct the landing position of the second car 7.
- the control part 16 writes the stop positions of the first and second cars 6, 7 into the memory 17 based on position signals for the first and second cars 6, 7 from the first and second position detection switches 11, 12.
- the stop positions of the first and second cars 6, 7 stored in the memory 17 are successively updated based on the position signals for the first and second cars 6, 7 from the first and second position detection switches 11, 12.
- control part 16 monitors car call signals from the call buttons 10 (step 100), so that when a call button 10 is pushed, the floor where a corresponding car call is generated is specified by the control part 16.
- a car near the car call generation floor is identified from the data of the stop positions of the first and second cars 6, 7 stored in the memory 17, and the drive unit 3 is driven so as to make the nearby car thus identified land on the car call generation floor (step 101).
- control part 16 determines, from the first position detection switch 11 on a set landing floor of the first car 6, whether the first car 6 has landed on the set landing floor (step 102). When it is determined that the first car 6 has normally landed on the set landing floor, the control part 16 stops the driving operation of the drive unit 3 (step 103).
- control part 16 performs arithmetic processing so as to determine, based on the data of floor-to-floor distances stored in the memory 17, whether it is necessary to correct the landing position of the second car 7 (step 104).
- step 104 determines that the correction of the landing position of the second car 7 is unnecessary
- the control flow moves to step 107, where it is determined, based on the second position detection switch 12 on a set landing floor of the second car 7, whether the second car 7 has landed on the set landing floor.
- the control part 16 opens the doors of the first and second cars 6, 7.
- step 107 when it is determined in step 107 that the second car 7 has not landed on the set landing floor, the control flow goes to step 108, where the drive motor 9 is driven to cause the pantograph structure 8 to move up or down, whereby the cab 7a of the second car 7 is moved in the vertical direction.
- the control part 16 determines, based on the second position detection switch 12 on the set landing floor of the second car 7, whether the second car 7 has landed on the set landing floor (step 109).
- step 110 the control part 16 stops the driving operation of the drive motor 9 (step 110).
- the doors of the first and second cars 6, 7 are opened.
- step 109 When it is determined in step 109 that the second car 7 has not landed on the set landing floor, a return to step 108 is performed.
- steps 108-110 together constitute a correction step or process for a landing deviation of the second car 7 resulting from a time-varying extension (i.e., extension over time) of the main rope 5 or an expansion or contraction of the main rope 5 due to the load acting thereon.
- step 104 when it is determined in step 104 that the correction of the landing position of the second car 7 is necessary, the control flow goes to step 105, where an amount of correction of the landing position of the second car 7 is calculated based on the data of floor-to-floor distances stored in the memory 17. Then, the drive motor 9 is driven to operate so that the amount of movement of the pantograph structure 8 is made equal to the amount of correction thus calculated (step 106), and thereafter the control flow goes to step 109.
- steps 104 through 106 together constitute a correction step or process for a landing deviation of the second car 7 resulting from a difference between floor-to-floor distances or an inequality in floor-to-floor distances.
- the landing correction device constructed from the pantograph structure 8 and the drive motor 9 is arranged on the second car 7, even if a landing deviation is generated in the second car 7 upon normal landing of the first car 6, the landing deviation of the second car 7 is quickly corrected by means of the landing correction device. Accordingly, the doors of the first and second cars 6, 7 can be made to open at the same time.
- the elevator apparatus adopts the 1:1 roping system, the structure thereof becomes simple, thus making it possible to reduce the cost of manufacture.
- the landing correction device is installed on the second car 7 alone, the number of landing correction devices used or required becomes one, and hence the reduction of cost can be accordingly made.
- control part 16 of the main control unit 15 controls the drive unit 3 in such a manner that the drive unit is driven to make the first car 6 normally land on its set landing floor, and the control part 16 also controls the pantograph structure 8 and the drive motor 9 so that they are driven to make the second car 7 normally land on its set landing floor. Therefore, even if there takes place a time-varying extension of the main rope 5 or an expansion or contraction thereof due to a load applied thereto, the first and second cars 6, 7 can be made to land on the respective floors substantially at the same time without generating any landing deviation, so that they can be opened at the same time.
- the floor-to-floor distances are stored in the memory 17, and the control part 16 calculates a landing deviation of the second car 7 generated upon normal landing of the first car 6, based on the data of the floor-to-floor distances stored in the memory 17, and controls to drive the pantograph structure 8 and the drive motor 9 so as to correct the calculated amount of landing deviation.
- the data of floor-to-floor distances stored in the memory 17 may be corrected based on the amount of correction cf the landing deviation obtained in the process of correction of the landing deviation in steps 108 through 110.
- the data of floor-to-floor distances stored in the memory 17 is updated, so that the generation of a landing deviation of the second car 7 resulting from the expansion or contraction of the main rope 5 can be suppressed.
- Fig. 4 is a vertical cross sectional view that schematically shows the construction of an elevator apparatus according to a second arrangement.
- a second car 7A has a cab 7a fixed attached to a car frame 7b, and a landing correction device in the form of an electric winch 20 is arranged at a main rcpe connection portion of the second car 7A.
- the elevator apparatus operates based on the flow chart shown in Fig. 3 .
- the control part 16 controls to drive the electric winch 20 so that the winch 20 winds up or draws out the main rope 5 thereby to correct the landing deviation of the second car 7A.
- the electric winch 20 is used as the landing correction device, and the electric winch 20 is arranged at the main rope connection portion of the second car 7A.
- the amount of correction of the second car 7A can be increased to accommodate a wide range of landing corrections, and the cab 7a need not be constructed such that it is movable in the vertical direction with respect to the car frame 7b, as in the above-mentioned first embodiment.
- the second car 7A can be of a simple structure. That is, a car of the same structure as that of the first car 6 can be used for the second car 7A.
- Fig. 5 is a vertical cross sectional view that schematically shows the construction of an elevator apparatus according to a first embodiment according to the present invention.
- a fixed deflector wheel 21 is arranged in the machine room 2 at a location close to the deflector wheel 4 with its axis of rotation being in alignment or coincidence with the axis of rotation of the deflector wheel 4.
- a movable deflector wheel 22 is arranged in the machine room 2 with its axis of rotation being in parallel to the axis of rotation of the fixed deflector wheel 21 so as to be movable toward and away from the fixed deflector wheel 21.
- a movable deflector wheel driving part in the form of a hydraulic jack 23 is arranged in the machine room 2 so as to move the movable deflector wheel 22 toward or away from the fixed deflector wheel 21.
- the fixed deflector wheel 21, the movable deflector wheel 22 and the hydraulic jack 23 together constitute a landing correction device.
- the main rope 5 is connected with the first car 6, ascends therefrom so as to be wrapped around the sheave 3a, and further wrapped sequentially around the fixed deflector wheel 21, the movable deflector wheel 22 and the deflector wheel 4, and descends therefrom to be connected with the second car 7A.
- the fixed deflector wheel 21 and the movable deflector wheel 22 are arranged on the path of the main rope 5 between the sheave 3a and the deflector wheel 4.
- the elevator apparatus operates based on the flow chart shown in Fig. 3 .
- the control part 16 controls the hydraulic jack 23 in such a manner that the hydraulic jack 23 is driven to move the movable deflector wheel 22 so as to approach or separate with respect to the deflector wheel 4 and the fixed deflector wheel 21, whereby the landing deviation of the second car 7A can be corrected.
- the second car 7A need not have a special structure, and the self weight of the second car 7A becomes lighter, thus making it possible to suppress the generation of the expansion and contraction of the main rope 5 due to the load applied thereto.
- the pair of the fixed deflector wheel 21 and the movable deflector wheel 22 are arranged on the path of the main rope between the sheave 3a and the deflector wheel 4, so roping ratio is increased, so a wide range of landing correction can be made with a small amount of movement of the movable deflector wheel 22.
- the number of pairs of the fixed deflector wheel 21 and the movable deflector wheel 22 is one, but a plurality of pairs of fixed deflector wheels 21 and movable deflector wheels 22 may instead be arranged on the main rope path between the sheave 3a and the deflector wheel 4. In this case, the roping ratio can be further increased, and hence it becomes possible to accommodate a much wider range of landing corrections.
- the movable deflector wheel drive part is not limited to such a hydraulic jack 23 but may instead comprise anything that is capable of moving the movable deflector wheel 22 to approach or separate with respect to the fixed deflector wheel 21.
- an electric motor and a mechanism for converting the rotating torque of this electric motor into a linear motion force may be used.
- the car connected with the sheave 3a side of the main rope 5 is made to normally land, and a landing deviation generated in the car connected with the deflector wheel 4 side of the main rope 5 is corrected, but the car connected with the deflector wheel side of the main rope 5 may instead be made to normally land, and a landing deviation generated in the car connected with the sheave side of the main rope 5 can be corrected.
- an elevator apparatus as disclosed above in which both cars connected with opposite ends of a main rope can be made to normally landed at the same time, is useful as an elevator apparatus capable of improving its service.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Elevator Control (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
- Cage And Drive Apparatuses For Elevators (AREA)
Description
- The present invention relates to an elevator apparatus As will be described in more detail below, the invention relates more particularly to an elevator apparatus having two cars suspended with 1:1 roping, and more especially to an elevator apparatus provided with a landing correction device for normally landing the two cars at the same time.
- A known elevator apparatus of a 1:1 roping system is constructed such that cars are connected with opposite ends of a main rope, respectively, which is wrapped around a drive sheave and a deflector wheel installed on an upper portion of a hoistway, as shown in Japanese patent application laid-open No.
2001-240343 - Here, in cases where there is developed an expansion of the main rope resulting from a time-varying change or an expansion or contraction of the main rope resulting from temperature or load changes, the landing position of the other car will shift or deviate by the expansion or contraction of the main rope upon landing of the one car, so it becomes impossible for both of the cars to land normally at the same time. Accordingly, it is necessary to land the other car and open its door after the one car has landed on a floor and its door has been opened and closed, thus giving rise to a problem that the service is reduced to a substantial extent.
- Similarly, in cases where floor-to-floor distances are different from one another, particularly in the case of three or more stops (i.e., the number of landing places for the elevator apparatus is three or more), there arises a problem that both of the cars cannot land normally at the same time.
- In order to solve such problems, an elevator called "Duo-Lifts" of a known 2:1 roping system, in which hydraulic jacks are arranged to be connected respectively with opposite fixed ends of a main rope in a machine room so as to be able to adjust the length of the main rope by the hydraulic jacks, has been proposed, for example, in ELEVETOR WORLD (26 February 92).
- However, the Duo-Lifts, adopting the 2:1 roping system, have a complicated structure, and uses the two hydraulic jacks, thus making it impossible to provide cost reduction.
-
JP-A-50114862 - According to the invention there is provided an elevator apparatus comprising a drive unit, a first deflector wheel, a hoistway, a first car, a main rope, a second car, in which a sheave of the drive unit and the deflector wheel are arranged at an upper portion of the hoistway, and the first car is connected with a sheave-side end of the main rope, which is suspended from said sheave and said deflector wheel, whereas the second car is connected with a deflector wheel-side end of said main rope suspended from said sheave and said deflector wheel, so that when one of said cars lands on a top floor, the other car lands on a bottom floor, wherein a fixed deflector wheel and a movable deflector wheel are arranged on a path of said main rope between said sheave and said first deflector wheel, and a landing correction device is provided for moving said movable deflector wheel toward and away from said fixed deflector wheel so as to adjust the length of said main rope between said fixed deflector wheel and said second car, thereby to correct a landing position of said second car.
- Embodiments of the present invention to be described are intended to obtain an elevator apparatus of a 1:1 roping system which is capable of correcting the landing positions of cars according to an amount of expansion or contraction of a main rope or according to a difference in floor-to-floor distances by the use of a landing correction device, so as to enable both of the cars to land at the same time.
- For a better understanding of the present invention, and to show how the same may be carried into effect, reference will now be made, by way of example only, to the accompanying drawings, in which:
-
Fig. 1 is a vertical cross sectional view schematically showing the construction of an elevator apparatus which is not an embodiment of the present invention as claimed but which is disclosed to facilitate an understanding of the invention; -
Fig. 2 is a system diagram of the elevator apparatus; -
Fig. 3 is a flow chart explaining the operation of the elevator apparatus; -
Fig. 4 is a vertical cross sectional view schematically showing the construction of another form of elevator apparatus, which also is not an embodiment of the present invention; -
Fig. 5 is a vertical cross sectional view schematically showing the construction of an elevator apparatus according to a first embodiment of the present invention. -
Fig. 1 is a vertical cross sectional view that schematically shows the construction of a first form of elevator apparatus.Fig. 2 is a system diagram of the elevator apparatus.Fig. 3 is a flow chart that explains the operation of the elevator apparatus. - In
Fig. 1 , adrive unit 3 and adeflector wheel 4 are installed in amachine room 2 which is constructed at an upper portion of ahoistway 1, with amain rope 5 being extended or wrapped around a sheave 3a of thedrive unit 3 and thedeflector wheel 4. In addition, afirst car 6 is connected with a sheave-side end of themain rope 5, and asecond car 7 is connected with a deflector wheel-side end of themain rope 5. Further, it is constructed such that when one of thefirst car 6 and thesecond car 7 lands on the top floor, the other car can land the bottom floor. - The
second car 7 has its chamber orcab 7a mounted on a car frame 7b for vertical movement relative thereto. A pantograph structure 8 is arranged between the floor of thecab 7a or the car frame 7b. Further, a drive motor 9 for driving the pantograph structure 8 in the vertical movement is mounted on the car frame 7b. Thus, by driving the pantograph structure 8 to move in the vertical movement by means of the drive motor 9, thecab 7a is caused to move with respect to the car frame 7b. Here, note that the pantograph structure 8 and the drive motor 9 together constitute a landing correction device. - A
call button 10 is installed in an elevator hall or landing place of each floor, and a firstposition detection switch 11 and a secondposition detection switch 12 are arranged on an inner wall surface of each floor in thehoistway 1. Also, a first positionswitch operation cam 13 and a second positionswitch operation cam 14 are arranged on thefirst car 6 and thesecond car 7, respectively. Upon landing of thefirst car 6 and thesecond car 7, the first positionswitch operation cam 13 and the second positionswitch operation cam 14 operate or actuate a firstposition detection switch 11 and a secondposition detection switch 12, respectively. Here, note that the second positionswitch operation cam 14 is moved up and down in association with the vertical movement of thecab 7a with respect to the car frame 7b. - The
main control unit 15 is arranged in themachine room 2, and includes acontrol part 16 and amemory 17, as shown inFig. 2 . By driving thedrive unit 3 based on car call signals from thecall buttons 10, themain control unit 15 drives thefirst car 6 and thesecond car 7 to move in the vertical direction. Based on position signals for thefirst car 6 and thesecond car 7 from a firstposition detection switch 11 and a secondposition detection switch 12, the drive motor 9 is controlled to be driven to correct the landing position of thesecond car 7. - Next, the operation of the elevator apparatus as constructed above will be explained as the operation of the
control part 16 while referring to the flow chart shown inFig. 3 . Here, note that data about the distances between respective floors is stored in thememory 17 beforehand. - The
control part 16 writes the stop positions of the first andsecond cars memory 17 based on position signals for the first andsecond cars position detection switches second cars memory 17 are successively updated based on the position signals for the first andsecond cars position detection switches - Then, the
control part 16 monitors car call signals from the call buttons 10 (step 100), so that when acall button 10 is pushed, the floor where a corresponding car call is generated is specified by thecontrol part 16. A car near the car call generation floor is identified from the data of the stop positions of the first andsecond cars memory 17, and thedrive unit 3 is driven so as to make the nearby car thus identified land on the car call generation floor (step 101). - Then, the
control part 16 determines, from the firstposition detection switch 11 on a set landing floor of thefirst car 6, whether thefirst car 6 has landed on the set landing floor (step 102). When it is determined that thefirst car 6 has normally landed on the set landing floor, thecontrol part 16 stops the driving operation of the drive unit 3 (step 103). - Then, the
control part 16 performs arithmetic processing so as to determine, based on the data of floor-to-floor distances stored in thememory 17, whether it is necessary to correct the landing position of the second car 7 (step 104). When it is determined instep 104 that the correction of the landing position of thesecond car 7 is unnecessary, the control flow moves tostep 107, where it is determined, based on the secondposition detection switch 12 on a set landing floor of thesecond car 7, whether thesecond car 7 has landed on the set landing floor. When it is determined instep 107 that thesecond car 7 has normally landed on the set landing floor, thecontrol part 16 opens the doors of the first andsecond cars - On the other hand, when it is determined in
step 107 that thesecond car 7 has not landed on the set landing floor, the control flow goes tostep 108, where the drive motor 9 is driven to cause the pantograph structure 8 to move up or down, whereby thecab 7a of thesecond car 7 is moved in the vertical direction. Thereafter, thecontrol part 16 determines, based on the secondposition detection switch 12 on the set landing floor of thesecond car 7, whether thesecond car 7 has landed on the set landing floor (step 109). When it is determined instep 109 that thesecond car 7 has normally landed on the set landing floor, thecontrol part 16 stops the driving operation of the drive motor 9 (step 110). As a result, the doors of the first andsecond cars step 109 that thesecond car 7 has not landed on the set landing floor, a return tostep 108 is performed. These steps 108-110 together constitute a correction step or process for a landing deviation of thesecond car 7 resulting from a time-varying extension (i.e., extension over time) of themain rope 5 or an expansion or contraction of themain rope 5 due to the load acting thereon. - On the other hand, when it is determined in
step 104 that the correction of the landing position of thesecond car 7 is necessary, the control flow goes tostep 105, where an amount of correction of the landing position of thesecond car 7 is calculated based on the data of floor-to-floor distances stored in thememory 17. Then, the drive motor 9 is driven to operate so that the amount of movement of the pantograph structure 8 is made equal to the amount of correction thus calculated (step 106), and thereafter the control flow goes tostep 109. Thesesteps 104 through 106 together constitute a correction step or process for a landing deviation of thesecond car 7 resulting from a difference between floor-to-floor distances or an inequality in floor-to-floor distances. - A similar operation is performed for a car call generated by any of car destination buttons (not shown) installed inside the first and
second cars - Thus, since the landing correction device constructed from the pantograph structure 8 and the drive motor 9 is arranged on the
second car 7, even if a landing deviation is generated in thesecond car 7 upon normal landing of thefirst car 6, the landing deviation of thesecond car 7 is quickly corrected by means of the landing correction device. Accordingly, the doors of the first andsecond cars main rope 5 or an expansion or contraction thereof due to the load applied thereto is generated, or when the floor-to-floor distances are different from one another, or even when there are three or more stops in which floor-to-floor distances are not equal, it is possible to make the first andsecond cars - In addition, since the elevator apparatus adopts the 1:1 roping system, the structure thereof becomes simple, thus making it possible to reduce the cost of manufacture. Moreover, since the landing correction device is installed on the
second car 7 alone, the number of landing correction devices used or required becomes one, and hence the reduction of cost can be accordingly made. - Further, the
control part 16 of themain control unit 15 controls thedrive unit 3 in such a manner that the drive unit is driven to make thefirst car 6 normally land on its set landing floor, and thecontrol part 16 also controls the pantograph structure 8 and the drive motor 9 so that they are driven to make thesecond car 7 normally land on its set landing floor. Therefore, even if there takes place a time-varying extension of themain rope 5 or an expansion or contraction thereof due to a load applied thereto, the first andsecond cars - Furthermore, the floor-to-floor distances are stored in the
memory 17, and thecontrol part 16 calculates a landing deviation of thesecond car 7 generated upon normal landing of thefirst car 6, based on the data of the floor-to-floor distances stored in thememory 17, and controls to drive the pantograph structure 8 and the drive motor 9 so as to correct the calculated amount of landing deviation. With such an arrangement, even in cases where there are three or more stops in which floor-to-floor distances are different from one another, the first andsecond cars - Here, note that in the above-mentioned apparatus, the data of floor-to-floor distances stored in the
memory 17 may be corrected based on the amount of correction cf the landing deviation obtained in the process of correction of the landing deviation insteps 108 through 110. In this case, when a time-varying expansion of themain rope 5 or an expansion or contraction of themain rope 5 due to the load is generated, the data of floor-to-floor distances stored in thememory 17 is updated, so that the generation of a landing deviation of thesecond car 7 resulting from the expansion or contraction of themain rope 5 can be suppressed. - Besides, in the above-mentioned apparatus, it has been described that the process of correcting a landing deviation resulting from a difference between the floor-to-floor distances in
steps 104 through 106 is performed after thefirst car 6 has normally landed, but such a landing deviation correction process may instead be carried out before or during the vertical operation of the first andsecond cars -
Fig. 4 is a vertical cross sectional view that schematically shows the construction of an elevator apparatus according to a second arrangement. - In
Fig. 4 , asecond car 7A has acab 7a fixed attached to a car frame 7b, and a landing correction device in the form of anelectric winch 20 is arranged at a main rcpe connection portion of thesecond car 7A. - Here, note that the construction of this second arrangement other than the above is similar to that of the above-mentioned elevator apparatus according to
Figures 1 to 3 . - In this arrangement, too, the elevator apparatus operates based on the flow chart shown in
Fig. 3 . In a process of correcting a landing deviation resulting from an expansion or contraction of themain rope 7 insteps 108 through 110 and in a process of correcting a landing deviation resulting from a difference between floor-to-floor distances insteps 104 through 106, thecontrol part 16 controls to drive theelectric winch 20 so that thewinch 20 winds up or draws out themain rope 5 thereby to correct the landing deviation of thesecond car 7A. - Thus, in the second elevator apparatus, too, advantageous effects similar to those of the above-mentioned first apparatus can be achieved.
- In addition, in this second apparatus, the
electric winch 20 is used as the landing correction device, and theelectric winch 20 is arranged at the main rope connection portion of thesecond car 7A. With such an arrangement, the amount of correction of thesecond car 7A can be increased to accommodate a wide range of landing corrections, and thecab 7a need not be constructed such that it is movable in the vertical direction with respect to the car frame 7b, as in the above-mentioned first embodiment. As a result, thesecond car 7A can be of a simple structure. That is, a car of the same structure as that of thefirst car 6 can be used for thesecond car 7A. -
Fig. 5 is a vertical cross sectional view that schematically shows the construction of an elevator apparatus according to a first embodiment according to the present invention. - In
Fig. 5 , a fixed deflector wheel 21 is arranged in themachine room 2 at a location close to thedeflector wheel 4 with its axis of rotation being in alignment or coincidence with the axis of rotation of thedeflector wheel 4. Also, amovable deflector wheel 22 is arranged in themachine room 2 with its axis of rotation being in parallel to the axis of rotation of the fixed deflector wheel 21 so as to be movable toward and away from the fixed deflector wheel 21. In addition, a movable deflector wheel driving part in the form of ahydraulic jack 23 is arranged in themachine room 2 so as to move themovable deflector wheel 22 toward or away from the fixed deflector wheel 21. Here, note that the fixed deflector wheel 21, themovable deflector wheel 22 and thehydraulic jack 23 together constitute a landing correction device. Moreover, themain rope 5 is connected with thefirst car 6, ascends therefrom so as to be wrapped around the sheave 3a, and further wrapped sequentially around the fixed deflector wheel 21, themovable deflector wheel 22 and thedeflector wheel 4, and descends therefrom to be connected with thesecond car 7A. In other words, the fixed deflector wheel 21 and themovable deflector wheel 22 are arranged on the path of themain rope 5 between the sheave 3a and thedeflector wheel 4. - Here, note that the construction of this embodiment other than the above is similar to that of the above-mentioned second apparatus.
- In this first embodiment, too, the elevator apparatus operates based on the flow chart shown in
Fig. 3 . In a process of correcting a landing deviation resulting from an expansion or contraction of themain rope 7 insteps 108 through 110 and in a process of correcting a landing deviation resulting from a difference between floor-to-floor distances insteps 104 through 106, thecontrol part 16 controls thehydraulic jack 23 in such a manner that thehydraulic jack 23 is driven to move themovable deflector wheel 22 so as to approach or separate with respect to thedeflector wheel 4 and the fixed deflector wheel 21, whereby the landing deviation of thesecond car 7A can be corrected. - Accordingly, in the first embodiment, too, advantageous effects similar to those of the above-mentioned apparatus can be achieved.
- In addition, since in this first embodiment, the landing correction device is installed in the
machine room 2, thesecond car 7A need not have a special structure, and the self weight of thesecond car 7A becomes lighter, thus making it possible to suppress the generation of the expansion and contraction of themain rope 5 due to the load applied thereto. - Moreover, since the pair of the fixed deflector wheel 21 and the
movable deflector wheel 22 are arranged on the path of the main rope between the sheave 3a and thedeflector wheel 4, the roping ratio is increased, so a wide range of landing correction can be made with a small amount of movement of themovable deflector wheel 22. - In the above-mentioned embodiment, it has been described that the number of pairs of the fixed deflector wheel 21 and the
movable deflector wheel 22 is one, but a plurality of pairs of fixed deflector wheels 21 andmovable deflector wheels 22 may instead be arranged on the main rope path between the sheave 3a and thedeflector wheel 4. In this case, the roping ratio can be further increased, and hence it becomes possible to accommodate a much wider range of landing corrections. - Further, although in the above-mentioned embodiment, it has been described that the
hydraulic jack 23 is used as the movable deflector wheel driving part, the movable deflector wheel drive part is not limited to such ahydraulic jack 23 but may instead comprise anything that is capable of moving themovable deflector wheel 22 to approach or separate with respect to the fixed deflector wheel 21. For example, an electric motor and a mechanism for converting the rotating torque of this electric motor into a linear motion force may be used. - Furthermore, in the above-mentioned first and second elevators, the car connected with the sheave 3a side of the
main rope 5 is made to normally land, and a landing deviation generated in the car connected with thedeflector wheel 4 side of themain rope 5 is corrected, but the car connected with the deflector wheel side of themain rope 5 may instead be made to normally land, and a landing deviation generated in the car connected with the sheave side of themain rope 5 can be corrected. - As described above, an elevator apparatus as disclosed above, in which both cars connected with opposite ends of a main rope can be made to normally landed at the same time, is useful as an elevator apparatus capable of improving its service.
Claims (4)
- An elevator apparatus comprising a drive unit (3), a first deflector wheel (4), a hoistway (1), a first car (6), a main rope (5), a second car (7), in which a sheave (3a) of the drive unit (3) and the deflector wheel (4) are arranged at an upper portion of the hoistway (1), and the first car (6) is connected with a sheave-side end of the main rope (5), which is suspended from said sheave (3a) and said deflector wheel (4), whereas the second car (7) is connected with a deflector wheel-side end of said main rope (1) suspended from said sheave (3a) and said deflector wheel (4), so that when one of said cars lands on a top floor, the other car lands on a bottom floor,
wherein a fixed deflector wheel (21) and a movable deflector wheel (22) are arranged on a path of said main rope (1) between said sheave (3a) and said first deflector wheel (4), and a landing correction device (23) is provided for moving said movable deflector wheel (22) toward and away from said fixed deflector wheel (21) so as to adjust the length of said main rope between said fixed deflector wheel and said second car (7), thereby to correct a landing position of said second car. - The elevator apparatus as set forth in claim 1, wherein a plurality of pairs of fixed deflector wheel (21) and movable deflector wheel (22) are arranged on said path of said main rope (5) between said sheave (3a) and said first deflector wheel (4).
- The elevator apparatus as set forth in claims 1 or 2, wherein the landing correction device comprises a main control unit (15) having a control part (16), said control part being operable to set landing floors for said first and second cars, respectively, based on generation of a car call registration and control to drive said drive unit (3) so as to make said first car land on a set landing floor, said control part (16) being further operable to control said landing correction device in such a manner that said second car lands on a set landing floor after said first car has landed on a set landing floor.
- The elevator apparatus as set forth in claim 3, wherein said main control unit (15) is provided with a memory (17) for storing data of floor-to-floor distances, and said control part (16) is arranged to calculate, based on said data of floor-to-floor distances stored in said memory, a landing deviation of said second car resulting from floor-to-floor distances generated when said first car has landed on a set landing floor, and to control driving said landing correction device so as to correct the landing deviation thus calculated.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2002/011999 WO2004046007A1 (en) | 2002-11-18 | 2002-11-18 | Elevator device |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1574467A1 EP1574467A1 (en) | 2005-09-14 |
| EP1574467A4 EP1574467A4 (en) | 2010-09-01 |
| EP1574467B1 true EP1574467B1 (en) | 2012-08-29 |
Family
ID=32321484
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP02808158A Expired - Lifetime EP1574467B1 (en) | 2002-11-18 | 2002-11-18 | Elevator device |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP1574467B1 (en) |
| JP (1) | JPWO2004046007A1 (en) |
| KR (1) | KR100685539B1 (en) |
| CN (1) | CN100340464C (en) |
| WO (1) | WO2004046007A1 (en) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4663388B2 (en) * | 2005-04-22 | 2011-04-06 | 三菱電機株式会社 | Elevator equipment |
| JP4502910B2 (en) * | 2005-09-08 | 2010-07-14 | 株式会社Taiyo | Hoisting device for elevator and cage position adjusting method |
| JP4848781B2 (en) * | 2006-01-30 | 2011-12-28 | 三菱電機株式会社 | Elevator equipment |
| EP2033925A1 (en) * | 2007-08-29 | 2009-03-11 | Inventio Ag | Elevator car, elevator comprising such an elevator car and method for controlling an elevator car |
| WO2009110907A1 (en) * | 2008-03-07 | 2009-09-11 | Otis Elevator Company | Secondary elevator car leveler |
| CN101920885A (en) * | 2010-08-27 | 2010-12-22 | 康力电梯股份有限公司 | The counterweightless duplex elevator |
| WO2012048748A1 (en) * | 2010-10-14 | 2012-04-19 | Kone Corporation | Extending roller guides |
| JP5528997B2 (en) * | 2010-12-09 | 2014-06-25 | 株式会社日立製作所 | Elevator cab vibration reduction device |
| JP5577275B2 (en) * | 2011-02-17 | 2014-08-20 | 株式会社日立製作所 | Elevator with floor height adjustment mechanism |
| ITTV20110126A1 (en) * | 2011-09-22 | 2013-03-23 | Enalias S R L U | VERTICAL AND HORIZONTAL HANDLING SYSTEM OF THE TRANSPORTATION CABIN IN AN ELEVATED TRANSLATOR SYSTEM TO OVERCOME OBSTACLES |
| FI125336B (en) | 2012-10-31 | 2015-08-31 | Kone Corp | Lift arrangement |
| JP5607703B2 (en) * | 2012-11-19 | 2014-10-15 | 東芝エレベータ株式会社 | Elevator and double deck type elevator |
| ITTV20130057A1 (en) | 2013-04-23 | 2014-10-24 | Tarcisio Scomparin | "ELEVATOR AND TRANSLATOR SYSTEM WITH A PORTAL STRUCTURE THAT EMPLOYS RACKS AND MORE VERTICAL AND HORIZONTAL TRAVEL LINES OF AT LEAST ONE TRANSPORT CABIN OF PEOPLE AND THINGS FOR THE OVERCOME OF OBSTACLES RAISED AND NOT." |
| CN103449288A (en) * | 2013-09-16 | 2013-12-18 | 罗湘林 | Energy-saving elevator bank with traction machine driving two lift cars |
| CN104909226B (en) * | 2015-06-19 | 2016-09-14 | 成都信息工程大学 | A safe and energy-saving bilateral elevator and its use method |
| CN105060043B (en) * | 2015-07-14 | 2017-03-29 | 日立电梯(中国)有限公司 | A kind of device for making car door sill align with landing sill |
| CN105936461A (en) * | 2016-06-08 | 2016-09-14 | 爱默生电梯有限公司 | Self-balancing dual-elevator applied to occasions with high human traffic |
| CN105883552A (en) * | 2016-06-28 | 2016-08-24 | 爱默生电梯有限公司 | Elevator car with spring pedal |
| KR102135192B1 (en) * | 2016-07-20 | 2020-07-17 | 미쓰비시덴키 가부시키가이샤 | Elevator control device and control method |
| DE102016217016A1 (en) * | 2016-09-07 | 2018-03-08 | Thyssenkrupp Ag | Car for a lift installation with linear motor drive, elevator installation with such a car and method for operating an elevator installation |
| WO2018173146A1 (en) * | 2017-03-22 | 2018-09-27 | 三菱電機株式会社 | Elevator control device and method for estimating extension amount of hoisting rope |
| JP2019043749A (en) * | 2017-09-06 | 2019-03-22 | 株式会社日立製作所 | Multi-car elevator |
| WO2019063866A1 (en) * | 2017-09-28 | 2019-04-04 | Kone Corporation | A method and an elevator system for defining an elongation of an elevator car suspension means |
| WO2020003346A1 (en) * | 2018-06-25 | 2020-01-02 | 三菱電機株式会社 | Elevator system |
| JP7097269B2 (en) * | 2018-09-20 | 2022-07-07 | 株式会社日立製作所 | Elevator control system and control method |
| DE102019201184A1 (en) * | 2019-01-30 | 2020-07-30 | Thyssenkrupp Ag | Car for an elevator installation with linear motor drive, elevator installation with such an elevator car and method for operating an elevator installation |
| JP7328880B2 (en) * | 2019-12-16 | 2023-08-17 | 株式会社日立製作所 | multi car elevator |
| CN114194984B (en) * | 2022-01-26 | 2023-10-03 | 浙江西沃电梯有限公司 | Elevator door opening structure with inconsistent door opening heights |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS497663B1 (en) * | 1969-10-23 | 1974-02-21 | ||
| JPS5633996B2 (en) | 1974-02-22 | 1981-08-07 | ||
| JPS50114862U (en) * | 1974-02-28 | 1975-09-19 | ||
| JPS52134960U (en) * | 1976-04-08 | 1977-10-13 | ||
| JPS5580666A (en) * | 1978-12-14 | 1980-06-18 | Deirukusukoetsuteru Hodo | Auxiliary operation device for elevator |
| US4466510A (en) * | 1982-03-22 | 1984-08-21 | Staley Development Corporation | Automatic floor-leveling means for a cable-suspended elevator |
| CA1244783A (en) * | 1984-08-13 | 1988-11-15 | Gordon A. Holland | Elevator system with improved car leveling |
| JPS6460585A (en) * | 1987-08-31 | 1989-03-07 | Toshiba Corp | Position controller for elevator |
| JPH0266085A (en) * | 1988-08-31 | 1990-03-06 | Toshiba Corp | Device for controlling cage position of elevator |
| JPH0859106A (en) * | 1994-08-18 | 1996-03-05 | Mitsubishi Denki Bill Techno Service Kk | Landing error correction device for elevator |
| JP2000118914A (en) * | 1998-10-08 | 2000-04-25 | Hitachi Building Systems Co Ltd | Elevator main rope tension compensator |
-
2002
- 2002-11-18 KR KR1020047020367A patent/KR100685539B1/en not_active Expired - Fee Related
- 2002-11-18 JP JP2004525645A patent/JPWO2004046007A1/en active Pending
- 2002-11-18 EP EP02808158A patent/EP1574467B1/en not_active Expired - Lifetime
- 2002-11-18 CN CNB028291603A patent/CN100340464C/en not_active Expired - Fee Related
- 2002-11-18 WO PCT/JP2002/011999 patent/WO2004046007A1/en not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| KR20050004923A (en) | 2005-01-12 |
| CN100340464C (en) | 2007-10-03 |
| CN1628066A (en) | 2005-06-15 |
| KR100685539B1 (en) | 2007-02-22 |
| EP1574467A4 (en) | 2010-09-01 |
| EP1574467A1 (en) | 2005-09-14 |
| JPWO2004046007A1 (en) | 2006-03-16 |
| WO2004046007A1 (en) | 2004-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1574467B1 (en) | Elevator device | |
| JP4457450B2 (en) | Double deck elevator control device | |
| EP1591399B1 (en) | Elevator equipment | |
| JP4742591B2 (en) | Elevator terminal safety device | |
| CN110817657A (en) | Elevator electric safety actuator | |
| CN110817643A (en) | Elevator electric safety actuator controller | |
| JPH09175748A (en) | Elevator car position compensating device | |
| US5220981A (en) | Elevator and a procedure for its control | |
| KR101400806B1 (en) | Elevator | |
| KR20040010778A (en) | Double deck elevator | |
| JP4260288B2 (en) | Double deck elevator | |
| JP4919593B2 (en) | Elevator operation device | |
| JP2012162361A (en) | Device for diagnosing double-deck elevator | |
| JP2017160008A (en) | Construction elevator | |
| JP2010208781A (en) | Elevator | |
| EP1319626B1 (en) | Elevator system and method of inspecting the elevator system | |
| JP3905613B2 (en) | elevator | |
| WO2004087552A1 (en) | Apparatus for driving a double-deck elevator to a landing level | |
| JP3953105B2 (en) | Elevator shuttle using horizontally transported elevator car | |
| JP2001019287A (en) | Control device of movable double deck elevator | |
| JP2505628B2 (en) | Double deck elevator | |
| JP2914832B2 (en) | Self-propelled elevator | |
| JP6079323B2 (en) | Control device for double deck elevator | |
| JP2010208752A (en) | Elevator device | |
| KR200199477Y1 (en) | Installation structure for winch of machine-roomless elevator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20041214 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR IE IT LI LU MC NL PT SE SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK RO SI |
|
| DAX | Request for extension of the european patent (deleted) | ||
| RBV | Designated contracting states (corrected) |
Designated state(s): DE |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: MITSUBISHI DENKI KABUSHIKI KAISHA |
|
| A4 | Supplementary search report drawn up and despatched |
Effective date: 20100729 |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B66B 1/42 20060101AFI20040608BHEP Ipc: B66B 11/00 20060101ALI20100723BHEP |
|
| 17Q | First examination report despatched |
Effective date: 20110218 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 60243622 Country of ref document: DE Effective date: 20121025 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20130530 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 60243622 Country of ref document: DE Effective date: 20130530 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R084 Ref document number: 60243622 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R084 Ref document number: 60243622 Country of ref document: DE Effective date: 20141107 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20171114 Year of fee payment: 16 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 60243622 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190601 |