EP1396046B9 - Procede d'orientation d'une tourelle hexapode - Google Patents
Procede d'orientation d'une tourelle hexapode Download PDFInfo
- Publication number
- EP1396046B9 EP1396046B9 EP02743335.8A EP02743335A EP1396046B9 EP 1396046 B9 EP1396046 B9 EP 1396046B9 EP 02743335 A EP02743335 A EP 02743335A EP 1396046 B9 EP1396046 B9 EP 1396046B9
- Authority
- EP
- European Patent Office
- Prior art keywords
- moving plate
- orientation
- hexapod
- legs
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images












Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q1/00—Details of, or arrangements associated with, antennas
- H01Q1/12—Supports; Mounting means
- H01Q1/125—Means for positioning
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01Q—ANTENNAS, i.e. RADIO AERIALS
- H01Q3/00—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system
- H01Q3/02—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system using mechanical movement of antenna or antenna system as a whole
- H01Q3/08—Arrangements for changing or varying the orientation or the shape of the directional pattern of the waves radiated from an antenna or antenna system using mechanical movement of antenna or antenna system as a whole for varying two co-ordinates of the orientation
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
- Y10T74/20329—Joint between elements
Definitions
- the invention relates to the application of hexapod turrets to the pointing of equipment such as antennas, optronic devices or telescopes, optical measuring or telecommunication devices or any device whose function requires orientation in space.
- the hexapod turrets or platforms of Stewart or Gough are devices generally used as antenna supports or telescopes allowing an adjustment of their orientation.
- the patent EP 0 515 888 filed on May 12, 1992 in the name of ANT NACHRICHTENTECH describes an example of a pointing device comprising a hexapod turret.
- a hexapod turret comprises a platform or fixed base, a movable plate on which is fixed the device to be oriented and six legs of adjustable length connecting the movable plate to the base. The ends of the legs are fixed in pairs by means of cardan-type links on the movable plate and the base so that the legs form triangles.
- Each leg includes two nested tubes slidable relative to each other. These tubes are powered by linear piezoelectric motors that adjust the length of the leg.
- Such a device makes it possible to move the movable plate according to six degrees of freedom.
- the object of the invention is to use a hexapod device to orient equipment with a large deflection and aiming on at least 2 ⁇ steradians so as to cover at least the half-space above the horizon.
- Another object of the invention is to orient the equipment in all directions of the half-space while permanently maintaining good rigidity.
- the document EP 0 266 026 A1 describes a method of moving the movable plate of a hexapod according to the preamble of claim 1.
- the invention proposes a method of moving the mobile plate of a hexapode according to claim 1.
- This method advantageously makes it possible to position the plate of the hexapod with an offset to avoid singular points, ie the positions in which the hexapod turret loses its rigidity.
- a deportation law giving a single position of the center OB of the plate in space according to its orientation is defined.
- This law defines a geometric surface called “offset surface” on which the center OB of the plate evolves.
- the displacement of the movable plate can be achieved by controlling a rotation of the movable plate along an axis perpendicular to the plane containing the sighting vectors V i and V i + 1 .
- This method of controlling the length variation of the legs avoids configurations of the hexapod turret which could reduce its rigidity and damage the mechanisms of the legs by collisions.
- the global movement of orientation of the moving plate is decomposed into a succession of unit displacements of azimuth ⁇ ⁇ and elevation ⁇ ⁇ of the movable platen. For each unitary displacement, the overall method of displacement (determination of a virtual rotation followed by a virtual translation) is reproduced.
- the invention further proposes a device for moving the movable plate of a hexapod, according to claim 13.
- the hexapod turret 100 comprises a base 10 and a movable plate 20 connected by six identical cylinders 1, 2, 3, 4, 5 and 6 constituting legs.
- Each jack i connects a point A i of the fixed base 10 to a point B i of the movable plate 20 and is set to a length L i corresponding to the distance A i B i .
- the connections between jacks and base 10 as well as the connections between jacks and movable plate 20 are materialized by twelve gimbal joints (or universal joint). Each of these joints comprise two elementary axes of rotation which intersect at points A 1 , A 2 , A 3 , A 4 , A 5 , A 6 , B 1 , B 2 , B 3 , B 4 , B 5 and B 6. .
- the points A i are located at a distance RA from the center OA of the fixed base 10 and are divided into three pairs, the pairs (A 1 , A 2 ), (A 3 , A 4 ) and (A 5 , A 6 ) being placed at 120 ° to each other.
- the points B i are located at a distance RB from the center OB of the moving plate 20 and are divided into three pairs, the pairs (B 2 , B 3 ), (B 4 , B 5 ), (B 6 , B 1 ) being placed at 120 ° to each other.
- Two jacks from a pair of points on the base 10 are always connected to points of distinct pairs on the movable plate 20. In this way, the jacks 1 to 6 converge two by two alternately towards the base 10 or towards the plateau mobile 20.
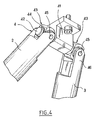
- connection is shown in more detail at the points B 2 and B 3 between the pair of jacks 2 and 3, and the movable plate 20.
- Such a connection comprises a central support 41 screwed onto the plate 10 and bearing symmetrically two cylindrical axes 42 oriented in the direction B 2 B 3 . Pivoting joints 43 are mounted on the pins 42.
- Each seal 43 has a bore which allows it to be fitted on one of the axes 42 of the central support 41.
- a pivot connection is made by a direct contact between a seal 43 and the surface of an axis 42.
- Each seal 43 is stopped in translation on the axis 42 by a circlip 44 mounted in a groove of the axis 42 or by a nut mounted on the threaded end of the shaft 42.
- the seals 43 further comprise two axes 45 perpendicular to their bore.
- the ends 46 of the cylinders 2 and 3 have a general form of clevis, consisting of two symmetrical parts inserting the seal 43 and having bores in which are fitted the shafts 45 of the seal 43.
- the ends 46 in the yoke of the cylinders 2 and 3 have chamfers so as to allow them maximum clearance relative to the seal 43 in all the orientation configurations thereof.
- connection is shown in greater detail at the points A 1 and A 2 between the pair of jacks 1 and 2, and the fixed base 10.
- This connection is comparable to the connection between jacks and movable plate shown in FIG. figure 4 .
- It comprises a central support 51 screwed onto the base 10 and symmetrically carrying two concentric cylindrical axes 52 oriented along the direction A 1 A 2 .
- Swivel joints 53 having a bore and two perpendicular axes 55 are mounted on the axes 52.
- the ends 56 of the cylinders 1 and 2 have a generally clevis shape, consisting of two symmetrical parts inserting a seal 52 and having bores in which are fitted the axes of the seal 52.
- the end portions 56 of the cylinders 1 and 2 support a device 57 for controlling the lengths L 1 and L 2 of the cylinders 1 and 2.
- the cylinder 1 comprising two sets LA and L B being able to slide relative to each other so as to vary the length L 1 of the cylinder 1.
- the device 57 for adjusting the length comprises a motor not 61 whose output axis 62 supports a worm 63 for driving in rotation a toothed wheel 64 disposed perpendicularly to the axis 62.
- This toothed wheel 64 drives a screw to ball 65 extending in the length of the assembly LA.
- the assembly L B comprises a nut 66 mounted integrally in which the ball screw 65 pivots. The rotation of the ball screw 65 in the nut 66 causes the translation of the nut 66 along the screw 65.
- the screw 65 has a speed of rotation proportional to that of the stepper motor 61. To determine the coefficient of proportionality between these speeds, it suffices to know the geometrical characteristics of the different mechanical parts (in particular the steps of the screw 65, the wheel 64 and the worm 63). Theoretically, by controlling the angular position of the output shaft 62 of the motor 61, the length L 1 of the cylinder 1 is obtained. To control this length, it is possible, for example, to use a position servo of the motor 61 in an open loop, or an absolute position measurement of the axis 62 by resolver for a closed-loop servocontrol. It is also possible to use optical encoders, incremental or absolute, single-turn or multi-turn.
- the Figures 6 to 8 represent the axes of rotation of the various constituent elements of the universal joints.
- the RPJ axis is linked to the central support 41 or 51 and the RSJ axes to the joints 43 or 53.
- the figure 10 is a graphical representation of the angle of rotation of the joint 43 at the point A 1 around RPJ as a function of the azimuth ⁇ for a fixed elevation ⁇ of the movable plate 20.
- the figure 11 is a graphical representation of the angle of rotation of the jack 1 at the point A 1 around RSJ as a function of the azimuth ⁇ for a fixed elevation ⁇ of the moving plate 20.
- the figure 12 gives the relative angle of rotation between the two elements LA and LB of the cylinder 1 as a function of the azimuth ⁇ for a fixed elevation ⁇ of the movable plate 20.
- hexapod turret 100 supports a satellite dish 30, it is shown in the reference position.
- the cylinders 1, 2, 3, 6, 5 and 6 are all set to the same length L 0 .
- the center OB is located vertically from the center OA on the vertical axis z 0 .
- the reference position can also be chosen as a virtual position of the turret.
- the reference position can be defined as a position for which the cylinders would take a length L 0 greater than the length that they can mechanically reach.
- a reference R 0 is defined, linked to the base 10, of center OA and of axes (x 0 , y 0 , z 0 ).
- the position of the movable plate 20 can be entirely determined by the position of its center OB and a viewing direction V defined by an azimuth ⁇ and an elevation ⁇ .
- the reference R 01 of center OB and of axes (x 01 , y 01 , z 01 ) is defined as the image by the rotation of the coordinate system R 0 with respect to the axis z 0 and of angle ⁇ .
- the reference R 02 of center OB and of axes (x 02 , y 02 , z 02 ) are defined as the image by the rotation of the reference R 01 with respect to the axis y 01 and of angle ⁇ .
- the reference R 02 is a reference fixed with respect to the movable plate 20.
- the direction x 02 defines the viewing direction V in the R 0 mark.
- the hexapod structure theoretically makes it possible to position the mobile plate 20 in the space according to six degrees of freedom. However, some positions lead to unstable configurations of the hexapod structure.
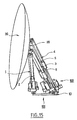
- the figure 15 represents a hexapod turret 100 in a configuration approaching instability.
- the movable plate 20 is substantially aligned with the cylinders 1 and 2 (the angle between leg and normal plateau reaches the limit value of 80 degrees).
- the structure 100 loses its rigidity when the angles between its elements (angles between axes jacks 1 to 6 and the normal to the plane of the fixed base 10 or movable plate 20) become close to 90 degrees. This phenomenon is particularly detrimental when the structure is placed outside and likely to be exposed to difficult climatic conditions.
- the hexapod turret 100 is used to point equipment towards elements situated at great distances from the dimensions of the turret, one is only interested in the orientation of its plate 20 and not in the position of the latter in the reference R 0 .
- the pointing direction V fixes the two orientation parameters ⁇ and ⁇ .
- An offset law d of the moving plate 20 is defined as a function of the aiming direction V to be pointed. For example, it is possible to control the variation of the lengths L 1 to L 6 of the legs 1 to 6 so that the center OB of the movable plate 20 moves in a plane perpendicular to the axis z 0 , that is to say at a height z constant with respect to the base 10. This plane defines the "offset surface" on which the OB point must always be.
- the point OB is offset by a distance d in the direction x 01 from its reference configuration illustrated in FIG. figure 13 .
- the direction x 01 of offset therefore depends on the azimuth angle ⁇ and the offset distance d is a function of the plateau elevation ⁇ .
- the Figures 16 and 17 give examples of laws of offset according to the elevation ⁇ .
- the hexapod turret 100 is in configurations in which the angles between the axes of the cylinders 1 to 6 and the normal to the plane of the fixed base 10 or movable plate 20 are always less than 45 degrees for example (giving a 45 degree safety margin).
- These laws make it possible to position the turret 100 away from singular points of low rigidity.
- the lengths L i of the jacks i obtainable are limited. Indeed, one must take into account the minimum and maximum possible elongations. On the other hand, one must respect the margin of safety chosen concerning the angles between the elements. One can choose a maximum angle of 135 or 150 degrees for example.
- FIG. 18 there is shown a displacement of the moving plate 20 of the turret 100.
- V 1 ( ⁇ 1 , ⁇ 1 ) towards a direction of view
- this reference R 02 we consider a virtual axis of rotation RH y 02 direction and passing through a fixed point PRH on the axis z 0 .
- a virtual rotation of the mobile plate 20 of RH axis and angle 90 ° - ⁇ 2 is performed. This rotation makes it possible to pass from the reference position of the turret (platform oriented at the zenith) to the position corresponding to the sighting direction V 2 .
- the reference position can be virtual.
- the offset of the moving plate (20) is determined in the direction of azimuth ⁇ 2 by virtue of the law of offset and the position of the points A 1 to A 6 and B 1 to B 6 are deduced therefrom. configuration.
- a virtual translation of the mobile plate 20 is carried out making it possible to bring the point OB back onto the offset surface.
- the lengths L 1 to L 6 of the legs 1 to 6 of the hexapod 100 are determined in this position of the plate 20. From this is deduced the elongation of each leg 1 to 6 necessary to pass from the orientation V 1 to V 2 with offset.
- t 1 second
- each leg length adjustment device i We realize a interpolation of the length of the legs: for example, an elongation speed of each jack i of / t ⁇ ⁇ The i (Linear interpolation).
- the turret 100 may pass through a singular point.
- the displacement of the plateau 20 from V 1 to V 2 can be decomposed into a series of unit displacements of azimuth ⁇ and elevation ⁇ ⁇ .
- Each unitary displacement makes it possible to go from a viewing direction V i to a viewing direction V i + 1 close to V i .
- the elongations of the cylinders are calculated by means of the two successive virtual transformations (a virtual rotation followed by a virtual translation) as previously described. In this way, the plate 20 is moved in a series of positions corresponding to target directions V 1 , ...
- V i , V i + 1 ... V 2 having a deviation of ⁇ ⁇ and ⁇ ⁇ .
- the values of ⁇ ⁇ and ⁇ ⁇ are chosen sufficiently small so that the plate 20 never goes through singular points or configurations that are physically impossible to achieve. Indeed, the smaller ⁇ ⁇ and ⁇ ⁇ are, the fewer the successive positions OB of the plateau 20 can approach a singular point.
- the successive positions of the viewing direction V i are illustrated. These positions are for example chosen with successive deviations of 1 °.
- the unitary trajectory of the orientation vector V i between two successive positions corresponds to a rotation of axis perpendicular to the plane containing the two successive orientations.
- the successive positions of V i can follow a direct global trajectory corresponding to an axis rotation perpendicular to V 1 and V 2 as illustrated on FIG. figure 19 or any global trajectory as illustrated on the figure 20 .
- the method of moving the movable plate 20 of the hexapod 100 previously described has the effect of linking the rotation of the movable plate 20 about its own axis x 02 to its azimuth rotation about the axis z 0 linked to the base 10
- V 1 ( ⁇ 1 , ⁇ 1 )
- V 2 ( ⁇ 2 , ⁇ 2 )
- the mobile plate 20 continuously compensates for this rotation of azimuth by rotating about its own axis z 02 of angle - ( ⁇ 2 - ⁇ 1 ).
- the overall rotation of the movable plate 20 about the axis z 0 is always zero.
- This method has for example the advantage that electrical cables connected to the device 30 mounted on the movable plate 20 and connecting the device to the ground never undergo torsion during the displacement of the movable plate 20.
- This feature makes it possible to control a continuous rotation the movable plate 20 about the azimuth axis z 0 without risking damage to the mechanism of the hexapod 100.
- the moving plate moving device does not require a rotary joint.
- Another advantage of this method is that it permanently controls the proper operation of the displacement device. Indeed, in the case where one of the leg length adjustment devices or one of the cylinders would be deficient, it is sometimes difficult to perceive a malfunction of the hexapod.
- the stops of the cylinders are in this case the only arrangements likely to stop the movement device in its movement.
- the hexapod structure risks passing through singular points leading to an inevitable damage to the universal joints.
- the orientation device comprises means for controlling that the overall rotation of the movable plate 20 about the axis z 0 is always zero.
- figure 21 represents an example of such control means.
- These means comprise a cable 80 connecting the center OB of the movable plate 20 to the center OA of the fixed base 10.
- This cable 80 has the properties of being flexible in bending and rigid in torsion. It is connected at a first end, at the center OB mobile plate 20 by a rigid connection and at a second end, at the center OA of the fixed base 10 by a pivot connection 82.
- the cable 80 is provided at this second end of 84.
- the second end of the cable 80 is always fixed with respect to the base 10 and the indicator element 84 is in contact with a detection circuit 86.
- the rotation of the plate 20 around the Z axis 0 generates the rotation of the cable 80 relative to the base 10.
- This rotation causes the rotation of the indicator element 84, which is no longer in contact with the detection circuit 86.
- the detection circuit 86 detects this cut of contact and sends an alert signal to a control device of the leg adjustment devices. In response to this signal, the controller stops movement of the hexapod 100.
- control means could be used.
Description
- L'invention concerne l'application de tourelles hexapodes aux pointages d'équipements tels que des antennes, des appareils optroniques ou des télescopes, des dispositifs optiques de mesure ou de télécommunication ou tout dispositif dont la fonction nécessite une orientation dans l'espace.
- Les tourelles hexapodes ou plates-formes de Stewart ou de Gough sont des dispositifs généralement utilisés comme supports d'antennes ou de télescopes permettant un réglage de leur orientation. Le brevet
EP 0 515 888 déposé le 12 mai 1992 au nom de ANT NACHRICHTENTECH décrit un exemple de dispositif de pointage comprenant une tourelle hexapode. Une tourelle hexapode comprend une plate-forme ou socle fixe, un plateau mobile sur lequel est fixé le dispositif à orienter et six jambes de longueur réglables reliant le plateau mobile au socle. Les extrémités des jambes sont fixées par paires au moyen de liaisons de type cardan sur le plateau mobile et le socle de manière à ce que les jambes forment des triangles. Chaque jambe comprend deux tubes emboîtés pouvant coulisser l'un par rapport à l'autre. Ces tubes sont actionnés par des moteurs piézo-électriques linéaires qui permettent de régler la longueur de la jambe. Un tel dispositif permet de déplacer le plateau mobile selon six degrés de liberté. - Dans le brevet
EP 0 515 888 , la tourelle hexapode décrite est fixée sur un satellite et son rôle consiste essentiellement à "sortir" l'équipement du volume du satellite pour obtenir une visée dégagée et accessoirement à l'orienter mais avec un faible débattement. - Le but de l'invention est d'utiliser un dispositif hexapode pour orienter un équipement avec un grand débattement et une visée sur au moins 2π stéradians de façon à couvrir au moins le demi-espace au-dessus de l'horizon.
- Le problème posé par l'utilisation d'une structure hexapode est qu'elle perd sa rigidité lorsque les angles entre deux jambes d'une même articulation et la normale au plan du socle fixe ou du plateau mobile deviennent proches de 90°, ce phénomène est couramment appelé l'effet "genouillère".
- Un autre but de l'invention est de pouvoir orienter l'équipement dans toutes les directions du demi-espace en conservant en permanence une bonne rigidité.
- Le document
EP 0 266 026 A1 décrit un procédé de déplacement du plateau mobile d'un hexapode conforme au préambule de la revendication 1. - L'invention propose un procédé de déplacement du plateau mobile d'un hexapode conforme à la revendication 1.
- Ce procédé permet avantageusement de positionner le plateau de l'hexapode avec un déport permettant d'éviter les points singuliers, c'est à dire les positions dans lesquelles la tourelle hexapode perd sa rigidité.
- Très préférentiellement, on définit une loi de déport donnant une position unique du centre OB du plateau dans l'espace en fonction de son orientation. Cette loi définit une surface géométrique dite « surface de déport » sur laquelle le centre OB du plateau évolue.
- Selon des variantes de ce procédé :
- la loi de déport définit une surface géométrique continue,
- la surface de déport est un plan,
- la surface de déport est une portion de sphère.
- Le déplacement du plateau mobile peut être réalisé en commandant une rotation du plateau mobile selon un axe perpendiculaire au plan contenant les vecteurs de visée Vi et Vi+1.
- La variation de longueur des jambes de l'hexapode peut avantageusement être déterminée selon les étapes suivantes :
- on définit une position de référence de l'hexapode selon laquelle toutes les jambes sont réglées à la même longueur L0,
- on détermine la variation de longueur de chaque jambe pour que le plateau mobile de l'hexapode se déplace de la position de référence à la direction de visée Vi+1 par une rotation virtuelle dans le plan d'azimut α i+1, et par une translation virtuelle du centre OB du plateau vers une surface de déport définie par la loi de déport,
- on en déduit une variation de longueur totale pour chaque jambe pour passer de la direction Vi à la direction Vi+1.
- Ce procédé de commande de la variation de longueur des, jambes permet d'éviter des configurations de la tourelle hexapode qui risqueraient de réduire sa rigidité et d'endommager les mécanismes des jambes par des collisions.
- Dans une mise en oeuvre de l'invention, le mouvement global d'orientation du plateau mobile est décomposé en une succession de déplacements unitaires d'azimut Δα et d'élévation Δβ du plateau mobile. Pour chaque déplacement unitaire, le procédé global de déplacement (détermination d'une rotation virtuelle suivi d'une translation virtuelle) est reproduit.
- Cette décomposition en Δα et Δβ unitaires évite que le plateau ne passe par un point singulier lors de son mouvement de passage d'une position à l'autre. De cette manière, on s'assure qu'au cours du mouvement du plateau mobile, la tourelle hexapode se trouve toujours dans une configuration stable.
- Le procédé peut avantageusement être complété par les étapes suivantes:
- on commande les dispositifs de réglages en fonction des longueurs Li des jambes à obtenir et en ce que ce calcul prend en compte les angles relatifs entre les éléments constitutifs des liaisons reliant les jambes au plateau et au socle fixe,
- les angles formés par les axes des jambes et la normale au plan du socle fixe et les angles formés par les axes des jambes et la normale au plan du plateau mobile sont toujours inférieurs à un angle maximum défini entre 40 et 80 degrés.
- L'invention propose en outre un dispositif de déplacement du plateau mobile d'un hexapode, conforme à la renvendication 13.
- Le dispositif peut être complété par les caractéristiques suivantes :
- le dispositif comprend des moyens de mesure de la position de l'axe du moteur,
- des liaisons sont disposées sur le socle fixe selon un premier cercle de rayon RA et des liaisons sont disposées sur le plateau mobile selon un deuxième cercle de rayon RB, le rapport RA/RB étant sensiblement égal à 1,5,
- les liaisons sont disposées par paires sur le plateau mobile ou sur le socle fixe selon un cercle de rayon R, la distance entre deux liaisons d'une même paire étant sensiblement égale à R/10,
- l'élongation maximale d'une jambe est inférieure à 2,
- l'élongation maximale d'une jambe est supérieure à 1,7.
- Ces différentes caractéristiques permettent en particulier d'obtenir des débattements importants.
- D'autres caractéristiques et avantages ressortiront encore de la description qui suit, laquelle est purement illustrative et non limitative et doit être lue en regard des figures annexées parmi lesquelles:
- la
figure 1 est un schéma cinématique d'une tourelle hexapode, - la
figure 2 est un schéma de la répartition sur le socle fixe des liaisons entre les jambes et le socle fixe, - la
figure 3 est un schéma de la répartition sur le plateau mobile des liaisons entre les jambes et le plateau mobile, - la
figure 4 représente un exemple de liaison entre le plateau mobile et une paire de jambes, - la
figure 5 représente un exemple de liaison entre le socle fixe et une paire de jambes, - les
figures 6 à 8 représentent les différents éléments mécaniques utilisés dans les liaisons desfigures 4 et5 , - la
figure 9 est une vue en coupe d'un dispositif de réglage de longueur d'un vérin, - la
figure 9bis est une vue en coupe du dispositif de réglage de lafigure 9 selon la coupe A-A, - les
figures 10 et 11 sont des représentations graphiques des angles de rotation des éléments constitutifs d'une liaison entre un vérin et le socle en fonction de l'orientation du plateau mobile, - la
figure 12 est une représentation graphique de l'angle de rotation relative entre les deux éléments constitutifs d'une jambe en fonction de l'orientation du plateau mobile, - la
figure 13 représente une tourelle hexapode sur lequel a été montée une antenne parabolique, dans sa position de référence, - la
figure 14 représente le système de repères azimut-élévation utilisés pour définir l'orientation du plateau mobile dans l'espace, - la
figure 15 représente une tourelle hexapode sur laquelle a été montée une antenne parabolique, la tourelle se trouve dans une position se rapprochant d'une configuration instable, - les
figures 16 et 17 représentent des exemples de lois de déport du plateau mobile en fonction de son élévation, - la
figure 18 illustre un principe de déplacement du plateau mobile de la tourelle, - les
figures 19 et 20 illustrent des trajectoires possibles de déplacement de la tourelle, - la
figure 21 représente un exemple de mise en oeuvre de moyens de contrôle du fonctionnement de la tourelle hexapode. - Sur la
figure 1 , la tourelle hexapode 100 comprend un socle 10 et un plateau mobile 20 reliés par six vérins identiques 1, 2, 3, 4, 5 et 6 constituant des jambes. Chaque vérin i relie un point Ai du socle fixe 10 à un point Bi du plateau mobile 20 et est réglé à une longueur Li correspondant à la distance AiBi. Les liaisons entre vérins et socle 10 ainsi que les liaisons entre vérins et plateau mobile 20 sont matérialisées par douze joints de type cardan (ou joint universel). Chacun de ces joints comprennent deux axes élémentaires de rotation qui se coupent aux points A1, A2, A3, A4, A5, A6, B1, B2, B3, B4, B5 et B6. - Comme représenté à la
figure 2 , les points Ai sont situés à une distance RA du centre OA du socle fixe 10 et sont répartis en trois paires, les paires (A1, A2), (A3, A4) et (A5, A6) étant placées à 120° les unes par rapport aux autres. De façon similaire sur lafigure 3 , les points Bi sont situés à une distance RB du centre OB du plateau mobile 20 et sont répartis en trois paires, les paires (B2, B3), (B4, B5), (B6, B1) étant placées à 120° les unes par rapport aux autres. Deux vérins issus d'une paire de points sur le socle 10 sont toujours reliés à des points de paires distinctes sur le plateau mobile 20. De cette manière, les vérins 1 à 6 convergent deux à deux alternativement vers le socle 10 ou vers le plateau mobile 20. - Sur la
figure 4 , on a représenté plus en détail une liaison au niveau des points B2 et B3 entre la paire de vérins 2 et 3, et le plateau mobile 20. Une telle liaison comporte un support central 41 vissé sur le plateau 10 et portant symétriquement deux axes cylindriques 42 orientés selon la direction B2B3. Des joints 43 pivotants sont montés sur les axes 42. - Chaque joint 43 comporte un alésage qui permet de l'emmancher sur l'un des axes 42 du support central 41. Dans ce cas, une liaison pivot est réalisée par un contact direct entre un joint 43 et la surface d'un axe 42. On peut choisir de réaliser les éléments dans des matériaux permettant de limiter le frottement: par exemple on réalise les axes 42 en acier et les joints 43 en bronze. Pour limiter encore les frottements, cette liaison peut aussi être réalisée en intercalant des éléments de type palier lisse rapporté dans le joint 43 ou roulement à bille ou à aiguilles. Chaque joint 43 est arrêté en translation sur l'axe 42 par un circlips 44 monté dans une rainure dé l'axe 42 ou par un écrou monté sur l'extrémité filetée de l'axe 42.
- Les joints 43 comportent en outre deux axes 45 perpendiculaires à leur alésage. Les extrémités 46 des vérins 2 et 3 présentent une forme générale de chape, constituée de deux parties symétriques insérant le joint 43 et présentant des alésages dans lesquels sont emmanchés les axes 45 du joint 43. Les extrémités 46 en chape des vérins 2 et 3 présentent des chanfreins de manière à leur permettre un débattement maximum par rapport au joint 43 dans toutes les configurations d'orientation de celui-ci.
- Sur la
figure 5 , on a représenté plus en détail une liaison au niveau des points A1 et A2 entre la paire de vérins 1 et 2, et le socle fixe 10. Cette liaison est comparable à la liaison entre vérins et plateau mobile représentée à lafigure 4 . Elle comporte un support central 51 vissé sur le socle 10 et portant symétriquement deux axes cylindriques 52 concentriques orientés selon la direction A1A2. Des joints pivotants 53 présentant un alésage et deux axes 55 perpendiculaires sont montés sur les axes 52. Les extrémités 56 des vérins 1 et 2 présentent une forme générale de chape, constituée de deux parties symétriques insérant un joint 52 et présentant des alésages dans lesquels sont emmanchés les axes du joint 52. - Les parties extrêmes 56 des vérins 1 et 2 supportent un dispositif 57 permettant de commander les longueurs L1 et L2 des vérins 1 et 2.
- Sur la
figure 9 , on a représenté le vérin 1 comprenant deux ensembles LA et LB pouvant coulisser l'un par rapport à l'autre de manière à faire varier la longueur L1 du vérin 1. Le dispositif 57 de réglage de longueur comprend un moteur pas à pas 61 dont l'axe de sortie 62 supporte une vis sans fin 63 permettant d'entraîner en rotation une roue dentée 64 disposée perpendiculairement à l'axe 62. Cette roue dentée 64 entraîne une vis à bille 65 s'étendant dans la longueur de l'ensemble LA. L'ensemble LB comprend un écrou 66 monté solidaire dans lequel la vis à bille 65 pivote. La rotation de la vis à bille 65 dans l'écrou 66 engendre la translation de l'écrou 66 le long le la vis 65. - Dans ce dispositif de réglage, la vis 65 a une vitesse de rotation proportionnelle à celle du moteur pas à pas 61. Pour déterminer le coefficient de proportionnalité entre ces vitesses, il suffit de connaître les caractéristiques géométriques des différentes pièces mécaniques (notamment les pas de la vis 65, de la roue 64 et de la vis sans fin 63). Théoriquement, en contrôlant la position angulaire de l'axe 62 de sortie du moteur 61, on obtient la longueur L1 du vérin 1. Pour commander cette longueur, on peut par exemple utiliser un asservissement de position du moteur 61 en boucle ouverte, ou une mesure absolue de position de l'axe 62 par resolveur pour un asservissement en boucle fermée. Il est également possible d'utiliser des codeurs optiques, incrémentaux ou absolus, mono-tour ou multi-tours.
- Néanmoins, l'allongement de vérin 1 n'est pas directement proportionnel à la grandeur angulaire mesurée par ce dispositif. En effet, au cours des variations de position du plateau mobile 20, il se produit une rotation relative des ensembles LA et LB. Cette rotation supplémentaire vient modifier la longueur L1 du vérin 1 par l'intermédiaire de la liaison hélicoïdale, indépendamment de l'action du moteur 61. On prend donc en compte cet effet pour établir la consigne donnée au moteur. Les rotations relatives sont déterminées analytiquement d'après les positions des points B1 à B6 calculées. Les calculs intermédiaires permettent de déterminer les rotations des éléments des joints de cardan.
- Les
figures 6 à 8 représentent les axes de rotation des différents éléments constitutifs des liaisons cardan. L'axe RPJ est lié au support central 41 ou 51 et les axes RSJ aux joints 43 ou 53. - La
figure 10 est une représentation graphique de l'angle de rotation du joint 43 au niveau du point A1 autour de RPJ en fonction de l'azimut α pour une élévation β fixée du plateau mobile 20. De même, lafigure 11 est une représentation graphique de l'angle de rotation du vérin 1 au niveau du point A1 autour de RSJ en fonction de l'azimut α pour une élévation β fixée du plateau mobile 20. Enfin, lafigure 12 donne l'angle de rotation relative entre les deux éléments LA et LB du vérin 1 en fonction de l'azimut α pour une élévation β fixée du plateau mobile 20. - Sur la
figure 13 , la tourelle hexapode 100 supporte une antenne parabolique 30, elle est représentée en position de référence. Dans cette position, les vérins 1, 2, 3, 6, 5 et 6 sont tous réglés à la même longueur L0. Dans cette configuration le centre OB est situé à la verticale du centre OA sur l'axe vertical z0. La position de référence peut aussi être choisie comme une position virtuelle de la tourelle. Par exemple, la position de référence peut être définie comme une position pour laquelle les vérins prendraient une longueur L0 supérieure à la longueur qu'ils peuvent mécaniquement atteindre. - Comme représenté à la
figure 14 , on définit un repère R0 lié au socle 10, de centre OA et d'axes (x0, y0, z0). Dans ce repère R0, la position du plateau mobile 20 peut être entièrement déterminée par la position de son centre OB et une direction de visée V définie par un azimut α et une élévation β. On définit le repère R01 de centre OB et d'axes (x01, y01, z01) comme l'image par la rotation du repère R0 par rapport à l'axe z0 et d'angle α. De la même manière, on définit le repère R02 de centre OB et d'axes (x02, y02, z02) comme l'image par la rotation du repère R01 par rapport à l'axe y01 et d'angle β. Le repère R02 est un repère fixe par rapport au plateau mobile 20. La direction x02 définit la direction de visée V dans le repère R0. - La structure hexapode permet en théorie de positionner le plateau mobile 20 dans l'espace selon six degrés de liberté. Cependant, certaines positions conduisent à des configurations instables de la structure hexapode. La
figure 15 représente une tourelle hexapode 100 dans une configuration s'approchant de l'instabilité. Sur cette figure, le plateau mobile 20 est pratiquement aligné avec les vérins 1 et 2 (l'angle entre jambe et normale au plateau atteint la valeur limite de 80 degrés). La structure 100 perd sa rigidité lorsque les angles entre ses éléments (angles entre axes des vérins 1 à 6 et la normale au plan du socle fixe 10 ou plateau mobile 20) deviennent proches de 90 degrés. Ce phénomène est particulièrement préjudiciable lorsque la structure est placée à l'extérieur et susceptible d'être exposée à des conditions climatiques difficiles. - Etant donné que l'on utilise la tourelle hexapode 100 pour pointer des équipements vers des éléments situés à des grandes distances par rapport aux dimensions de la tourelle, on ne s'intéresse qu'à l'orientation de son plateau 20 et non pas à la position de celui-ci dans le repère R0.
- La direction de pointage V fige les deux paramètres d'orientation α et β. On définit une loi de déport d du plateau mobile 20 en fonction de la direction de visée V à pointer. Par exemple, on peut commander la variation des longueurs L1 à L6 des jambes 1 à 6 pour que le centre OB du plateau mobile 20 se déplace selon un plan perpendiculaire à l'axe z0, c'est à dire à une hauteur z constante par rapport au socle 10. Ce plan définit la «surface de déport » sur laquelle devra toujours se trouver le point OB. Pour une direction de visée V donnée, le point OB est déporté d'une certaine distance d dans la direction x01 par rapport à sa configuration de référence illustrée à la
figure 13 . La direction x01 de déport dépend donc de l'angle d'azimut α et la distance d de déport est fonction de l'élévation β du plateau. - Les
figures 16 et 17 donnent des exemples de lois de déport en fonction de l'élévation β. Lorsque ces lois de positionnement du plateau mobile 20 sont respectées, la tourelle hexapode 100 se trouve dans des configurations dans lesquelles les angles entre les axes des vérins 1 à 6 et la normale au plan du socle fixe 10 ou plateau mobile 20 sont toujours inférieurs à 45 degrés par exemple (ce qui donne une marge de sécurité de 45 degrés). Ces lois permettent de positionner la tourelle 100 loin des points singuliers de faible rigidité. - Bien entendu, il existe de nombreuses façons de définir le déport d à appliquer:
- selon le type de surface de déport sur laquelle se déplace le point OB: on peut choisir une surface de déport autre qu'un plan, par exemple une portion de sphère ou d'ellipsoïde,
- selon la loi de positionnement sur cette surface: on peut par exemple fixer une loi de déport d en fonction de l'angle d'élévation β.
- Il existe néanmoins des conditions à ces choix. D'une part, les longueurs Li des vérins i pouvant être obtenues sont limitées. En effet, on doit prendre en compte les élongations minimale et maximale possibles. D'autre part, on doit respecter la marge de sécurité choisie concernant les angles entre les éléments. On peut choisir un angle maximum de 135 ou 150 degrés par exemple.
- Sur la
figure 18 , on a représenté un déplacement du plateau mobile 20 de la tourelle 100. Pour déplacer le plateau mobile 20 de la tourelle hexapode 100 à partir d'une direction de visée V 1 = (α 1,β 1) vers une direction de visée V 2 = (α 2,β 2) proche de V 1, on procède comme suit : - Dans une première étape, on considère le repère R02 orienté de manière à ce que x02 = V 2. Dans ce repère R02, on considère un axe de rotation virtuel RH de direction y02 et passant par un point PRH fixe sur l'axe z0. On réalise une rotation virtuelle du plateau mobile 20 d'axe RH et d'angle 90°-β2. Cette rotation permet de passer de la position de référence de la tourelle (plateau orienté au zénith) à la position correspondant à la direction de visée V2. Comme précédemment décrit, la position de référence peut être virtuelle.
- Dans une deuxième étape, on détermine le déport du plateau mobile (20) selon la direction d'azimut α2 grâce à la loi de déport et on en déduit la position des points A1 à A6 et B1 à B6 dans cette configuration. A cet effet, on réalise une translation virtuelle du plateau mobile 20 permettant de ramener le point OB sur la surface de déport. On détermine les longueurs L1 à L6 des jambes 1 à 6 de l'hexapode 100 dans cette position du plateau 20. On en déduit l'allongement de chaque jambe 1 à 6 nécessaire pour passer de l'orientation V1 à V2 avec déport.
- Pour déplacer le plateau 20 de V1 à V2 en un temps t déterminé (par exemple t = 1 seconde), chaque dispositif de réglage de longueur de jambe i doit commander un allongement des vérins de ΔL i. On réalise une interpolation de la longueur des jambes : par exemple on commande une vitesse d'allongement de chaque vérin i de

- Lorsque le déplacement du plateau 20 devient trop important (par exemple le déplacement de V1 à V2 est supérieur à 1°), la tourelle 100 risque de passer par un point singulier. Pour éviter ces points singuliers, le déplacement du plateau 20 de V1 à V2 peut être décomposé en une suite de déplacements unitaires d'azimut Δα et d'élévation Δβ. Chaque déplacement unitaire permet de passer d'une direction de visée Vi à une direction de visée Vi+1 proche de Vi. Pour chaque déplacement unitaire, on calcule les allongements des vérins grâce aux deux transformations virtuelles successives (une rotation virtuelle suivie d'une translation virtuelle) comme décrit précédemment. De cette manière, le plateau 20 est déplacé selon une suite de positions correspondant à des directions de visées V1,...Vi, Vi+1...V2 présentant un écart de Δα et Δβ. Les valeurs de Δα et Δβ sont choisies suffisamment petites pour que le plateau 20 ne passe jamais par des points singuliers ou des configurations impossibles à réaliser physiquement. En effet, plus Δα et Δβ seront petits, moins les positions successives OB du plateau 20 ne pourront s'approcher d'un point singulier.
- Sur les
figures 19 et 20 , on a illustré les positions successives de la direction de visée Vi. Ces positions sont par exemple choisies avec des écarts successifs de 1°. La trajectoire unitaire du vecteur orientation Vi entre deux positions successives correspond à une rotation d'axe perpendiculaire au plan contenant les deux orientations successives. Les positions successives de Vi peuvent suivre une trajectoire globale directe correspondant à une rotation d'axe perpendiculaire à V1 et V2 ainsi qu'illustré sur lafigure 19 ou une trajectoire globale quelconque ainsi qu'illustré sur lafigure 20 . - Bien entendu, il existe une infinité de manières de caractériser la direction de visée V suivant les systèmes de repérage et les conventions utilisées. En outre, bien qu'on utilise ce système de coordonnées pour définir la direction de visée V, on ne reproduit pas nécessairement les rotations azimut et élévation mécaniquement. On peut commander des rotations et des translations différentes conduisant à la direction de visée définie en azimut et en élévation.
- Le procédé de déplacement du plateau mobile 20 de l'hexapode 100 précédemment décrit a pour effet de lier la rotation du plateau mobile 20 autour de son axe propre x02 à sa rotation d'azimut autour de l'axe z0 lié au socle 10. Lorsque le plateau mobile 20 est déplacé d'une direction de visée V 1 = (α 1,β 1 ) vers une direction de visée V 2 = (α2,β2 ), il tourne autour de l'axe z0 d'un angle d'azimut α2-α 1 . Avec le procédé précédemment décrit, le plateau mobile 20 compense en permanence cette rotation d'azimut en effectuant une rotation autour de son axe propre z02 d'angle -(α 2-α 1). Ainsi, il en résulte que la rotation globale du plateau mobile 20 autour de l'axe z0 est toujours nulle.
- Ce procédé présente par exemple l'avantage que des câbles électriques liés au dispositif 30 monté sur le plateau mobile 20 et reliant ce dispositif au sol ne subissent jamais de torsion lors du déplacement du plateau mobile 20. Cette caractéristique permet de pouvoir commander une rotation continue du plateau mobile 20 autour de l'axe d'azimut z0 sans risquer d'endommager le mécanisme de l'hexapode 100. En outre, le dispositif de déplacement du plateau mobile ne nécessite pas de joint tournant.
- Un autre avantage de ce procédé est qu'il permet de contrôler en permanence le bon fonctionnement du dispositif de déplacement. En effet, dans le cas où l'un des dispositifs de réglage de longueur de jambe ou l'un des vérins serait déficient, il est parfois difficile de s'apercevoir d'une anomalie de fonctionnement de l'hexapode. Les butées des vérins sont dans un tel cas les seules dispositions susceptibles d'arrêter le dispositif de déplacement dans son mouvement. Cependant, la loi de mouvement n'étant plus respectée, la structure hexapode risque de passer par des points singuliers conduisant à un endommagement inévitable des joints universels.
- Pour éviter ces risques, le dispositif d'orientation comprend des moyens pour contrôler que la rotation globale du plateau mobile 20 autour de l'axe z0 est toujours nulle.
- A cet effet, la
figure 21 représente un exemple de tels moyens de contrôle. Ces moyens comprennent un câble 80 reliant le centre OB du plateau mobile 20 au centre OA du socle fixe 10. Ce câble 80 présente les propriétés d'être souple en flexion et rigide en torsion. Il est relié à une première extrémité, au centre OB plateau mobile 20 par une liaison rigide et à une deuxième extrémité, au centre OA du socle fixe 10 par une liaison pivot 82. Le câble 80 est muni au niveau de cette deuxième extrémité d'un élément indicateur 84. En fonctionnement normal du dispositif d'orientation de l'hexapode 100, la deuxième extrémité du câble 80 est toujours fixe par rapport au socle 10 et l'élément indicateur 84 est en contact avec un circuit de détection 86. - Dans le cas d'une déficience de l'un des dispositifs de réglage de longueur des jambes 1, 2, 3, 4, 5, ou 6 ou de déficience de l'un des vérins, la rotation du plateau 20 autour de l'axe z0 génère la rotation du câble 80 par rapport au socle 10. Cette rotation entraîne la rotation de l'élément indicateur 84, qui ne se trouve plus en contact avec le circuit de détection 86. Le circuit de détection 86 détecte cette coupure de contact et envoie un signal d'alerte à un dispositif de commande des dispositifs de réglage des jambes. En réponse à ce signal, le dispositif de commande stoppe le mouvement de l'hexapode 100.
- Bien entendu, d'autres types de moyens de contrôle pourraient être utilisés.
Claims (22)
- Procédé de déplacement du plateau mobile (20) d'un hexapode (100) dont les jambes (1, 2, 3, 4, 5, 6) sont munies d'un dispositif de réglage de longueur, à partir d'une orientation Vi définie par ses coordonnées azimut-élévation (α i,β i) vers une orientation Vi+1 définie par ses coordonnées azimut-élévation (α i+1, β i+1), comprenant les étapes selon lesquelles:- on définit une loi définissant une distance de déport d en fonction de l'orientation du plateau (20),- on détermine la distance de déport d correspondant à l'orientation Vi+1,- on commande les dispositifs de réglage pour modifier les longueurs L1 à L6 des jambes (1, 2, 3, 4, 5, 6) pour déplacer le plateau mobile (20) de l'orientation Vi à l'orientation Vi+1 et le déporter par rapport à la perpendiculaire au socle fixe (10) de l'hexapode (100) passant par le centre OA de ce socle (10), dans le plan d'azimut de Vi+1, de la distance d,caractérisé en ce qu'il comprend en outre des étapes selon lesquelles on vérifie en permanence que la rotation globale du plateau mobile (20) par rapport à la verticale au socle fixe (10) est nulle, et lorsqu'on détecte que la rotation globale du plateau mobile (20) par rapport à la verticale au socle fixe (10) n'est plus nulle, on génère une commande pour stopper le mouvement de l'hexapode (100).
- Procédé selon la revend cation 1, caractérisé en ce qu'on définit une loi de déport donnant une position unique du centre OB du plateau dans l'espace en fonction de son orientation.
- Procédé selon la revendication 2, caractérisé en ce que la loi de déport définit une surface géométrique continue.
- Procédé selon la revendication 3, caractérisé en ce que la surface de déport est un plan,
- Procédé selon la revendication 3, caractérisé en ce que la surface de déport est une portion de sphère.
- Procédé selon l'une des revendications précédentes, caractérisé en ce qu'on déplace le plateau mobile (20) en commandant une rotation du plateau mobile (20) selon un axe perpendiculaire au plan contenant les vecteurs de visée Vi et Vi+1.
- Procédé selon l'une des revendications précédentes, caractérisé en ce que la variation de longueur des jambes (1, 2, 3, 4, 5, 6) de l'hexapode (100) est déterminée selon les étapes suivantes :- on définit une position de référence de l'hexapode (100) selon laquelle toutes les jambes (1, 2, 3, 4, 5, 6) sont réglées à la même longueur L0,- on détermine la variation de longueur de chaque jambe (1, 2, 3, 4, 5, 6) pour que le plateau mobile (20) de l'hexapode (100) se déplace de la position de référence à la direction de visée Vi+1 par une rotation virtuelle dans le plan d'azimut α i+1, et par une translation virtuelle du centre OB du plateau (20) vers une surface de déport définie par la loi de déport,- on en déduit une variation de longueur totale pour chaque jambe (1, 2, 3, 4, 5, 6) pour passer de la direction Vi à la direction Vi+1.
- Procédé selon l'une des revendications précédentes, caractérisé en ce que le mouvement global d'orientation du plateau mobile (20) est décomposé en une succession de déplacements unitaires d'azimut Δα et d'élévation Δβ du plateau mobile (20).
- Procédé selon l'une des revendications précédentes, caractérisé en ce qu'on commande les dispositifs de réglage en fonction des longueurs Li des jambes (1, 2, 3, 4, 5, 6) à obtenir et en ce que ce calcul prend en compte les angles relatifs entre les éléments constitutifs des liaisons reliant les jambes (1, 2, 3, 4, 5, 6) au plateau (20) et au socle (10).
- Procédé selon la revendication 9, caractérisé en ce qu'on détermine les angles relatifs entre les éléments constitutifs des liaisons reliant les jambes (1, 2, 3, 4, 5, 6) au plateau (20) et au socle (10) à partir des positions des points de liaison entre les jambes (1, 2, 3, 4, 5, 6) et le plateau (20) calculées, et on en déduit les rotations relatives entre les ensembles coulissants des vérins.
- Procédé selon la revendication 10, caractérisé en ce que chaque jambe (1, 2, 3, 4, 5, 6) de l'hexapode (100) comprenant un vérin constitué de deux ensembles coulissants l'un par rapport à l'autre et un actionneur (61) dont l'axe de sortie (62) entraîne en rotation une vis (65) constitutive d'une liaison hélicoïdale entre les ensembles coulissants, on déduit un allongement supplémentaire de chaque vérin dû aux rotations relatives entre ses ensembles coulissants (LA, LB) en fonction des caractéristiques géométriques de la liaison hélicoïdale, et en ce qu'on prend en compte cet allongement supplémentaire pour établir une consigne pour commander l'actionneur (61).
- Procédé selon l'une des revendications précédentes, caractérisé en ce que les angles formés par les axes des jambes (1, 2, 3, 4, 5, 6) et la normale au plan du socle fixe (10) et les angles formés par les axes des jambes (1, 2, 3, 4, 5, 6) et la normale au plan du plateau mobile (20) sont toujours inférieurs à un angle maximum défini entre 40 et 80 degrés.
- Dispositif de déplacement du plateau mobile (20) d'un hexapode (100) dont les jambes (1, 2, 3, 4, 5, 6) sont munies d'un dispositif de réglage de longueur, à partir d'une orientation Vi définie par ses coordonnées azimut-élévation (α i,β i) vers une orientation Vi+1 définie par ses coordonnées azimut-élévation (α i+1,β i+1), comprenant des moyens de commande adaptés pour réaliser les étapes suivantes :- définir une loi définissant une distance de déport d en fonction de l'orientation du plateau (20),- déterminer la distance de déport d correspondant à l'orientation Vi+1,- commander les dispositifs de réglage pour modifier les longueurs L1 à L6 des jambes (1, 2, 3, 4, 5, 6) pour déplacer le plateau mobile (20) de l'orientation Vi à l'orientation Vi+1 et le déporter par rapport à la perpendiculaire au socle fixe (10) de l'hexapode (100) passant par le centre OA de ce socle (10), dans le plan d'azimut de Vi+1, de la distance d, le dispositif étant caractérisé en ce qu'il comprend des moyens pour vérifier que la rotation globale du plateau mobile (20) par rapport à la verticale au socle fixe (10) est nulle, et en ce que les moyens de commande sont adaptés pour générer une commande pour stopper le mouvement de l'hexapode lorsque la rotation globale du plateau mobile (20) par rapport à la verticale au socle fixe (10) n'est plus nulle.
- Dispositif selon la revendication 13, caractérisé en ce que chaque jambe (1, 2, 3, 4, 5, 6) de l'hexapode (100) comprend un vérin comprenant un premier et un second ensemble (LA, LB) pouvant coulisser l'un par rapport à l'autre, un actionneur (61) dont l'axe de sortie (62) entraîne en rotation une vis (65) disposée perpendiculairement à l'axe (62) du moteur (61), ladite vis (65) s'étendant dans la longueur du premier ensemble (LA) et pouvant pivoter à l'intérieur d'un écrou (66) monté solidaire du second ensemble (LB), la rotation de la vis (65) dans l'écrou (66) entraînant la translation du second ensemble (LB) par rapport au premier ensemble (LA).
- Dispositif selon la revendication 14, caractérisé en ce que les moyens de commandes sont aptes à déterminer un allongement supplémentaire de chaque vérin dû aux rotations relatives entre ses ensembles coulissants (LA, LB) en fonction des caractéristiques géométriques de la liaison hélicoïdale, et à prendre en compte cet allongement supplémentaire pour établir une consigne pour commander l'actionneur (61).
- Dispositif selon l'une des revendications 14 ou 15, caractérisé en ce qu'il comprend des moyens de mesure de la position de l'axe (62) de l'actionneur (61).
- Dispositif selon l'une des revendications 13 à 16, caractérisé en ce que des liaisons sont disposées sur le socle fixe (10) selon un premier cercle de rayon RA et des liaisons sont disposées sur le plateau mobile (20) selon un deuxième cercle de rayon RB, le rapport RA/RB étant sensiblement égal à 1,5.
- Dispositif selon l'une des revendications 13 à 17, caractérisé en ce que les liaisons sont disposées par paires sur le plateau mobile (20) ou sur le socle (10) fixe selon un cercle de rayon R, la distance entre deux liaisons d'une même paire étant sensiblement égale à R/10.
- Dispositif selon l'une des revendications 13 à 18, caractérisé en ce que l'élongation maximale d'une jambe est inférieure ou égale à 2.
- Dispositif selon l'une des revendications 13 à 19, caractérisé en ce que l'élongation maximale d'une jambe est supérieure ou égale à 1,7.
- Dispositif selon l'une des revendications 13 à 20, caractérisé en ce qu'il comprend un élément rigide en torsion connecté à une première extrémité, au plateau mobile (20) par une liaison rigide et à une deuxième extrémité, au socle fixe (10) par une liaison pivot, ainsi que des moyens pour détecter une rotation de la deuxième extrémité de l'élément par rapport au socle (20).
- Dispositif selon la revendication 21, caractérisé en ce que les moyens de détection comprennent un élément indicateur fixé à la deuxième extrémité du câble ainsi qu'un circuit de détection, et en ce que lorsque la deuxième extrémité du câble est fixe par rapport au socle (10), l'élément indicateur établit un contact avec un circuit de détection et lorsque la deuxième extrémité du câble tourne par rapport au socle fixe (10), l'élément indicateur rompt ce contact.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0107136A FR2825445B1 (fr) | 2001-05-31 | 2001-05-31 | Procede d'orientation d'une tourelle hexapode |
| FR0107136 | 2001-05-31 | ||
| PCT/FR2002/001816 WO2002097920A1 (fr) | 2001-05-31 | 2002-05-30 | Procede d'orientation d'une tourelle hexapode |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1396046A1 EP1396046A1 (fr) | 2004-03-10 |
| EP1396046B1 EP1396046B1 (fr) | 2013-01-02 |
| EP1396046B9 true EP1396046B9 (fr) | 2013-07-10 |
Family
ID=8863813
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP02743335.8A Expired - Lifetime EP1396046B9 (fr) | 2001-05-31 | 2002-05-30 | Procede d'orientation d'une tourelle hexapode |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7081866B2 (fr) |
| EP (1) | EP1396046B9 (fr) |
| KR (1) | KR100880290B1 (fr) |
| ES (1) | ES2402406T3 (fr) |
| FR (1) | FR2825445B1 (fr) |
| WO (1) | WO2002097920A1 (fr) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7469381B2 (en) | 2007-01-07 | 2008-12-23 | Apple Inc. | List scrolling and document translation, scaling, and rotation on a touch-screen display |
| US7296243B2 (en) | 2002-03-19 | 2007-11-13 | Aol Llc | Animating display motion |
| ES2231026A1 (es) * | 2003-10-27 | 2005-05-01 | Ramem, S.A. | Posicionador tipo hexapodo para seguimiento solar de reflectores solares. |
| ITRM20050338A1 (it) * | 2005-06-28 | 2006-12-29 | Finmeccanica Spa | Struttura isostatica di sostegno per riflettori di antenne di grandi dimensioni fissi o ripuntabili. |
| US7671797B1 (en) * | 2006-09-18 | 2010-03-02 | Nvidia Corporation | Coordinate-based system, method and computer program product for adjusting an antenna |
| DE102006046758A1 (de) * | 2006-09-29 | 2008-04-03 | Abb Patent Gmbh | Vorrichtung insbesondere zum Positionieren von Objekten |
| SE530700C2 (sv) * | 2006-12-21 | 2008-08-19 | Hexagon Metrology Ab | Förfarande och anordning för kompensering av geometriska fel i bearbetningsmaskiner |
| FR2929195B1 (fr) * | 2008-03-27 | 2010-05-07 | Peugeot Citroen Automobiles Sa | Projecteur d'eclairage a orientation variable commandee, pour vehicule automobile |
| US8215199B2 (en) * | 2008-11-17 | 2012-07-10 | Marcroft Sacha L | Parallel kinematic positioning system |
| CN103370582A (zh) | 2010-11-24 | 2013-10-23 | 威廉·J·帝维利尔 | 太阳能收集器定位装置 |
| TWI493148B (zh) * | 2011-11-22 | 2015-07-21 | William J Devillier | 太陽能收集器定位裝置 |
| US9376221B1 (en) * | 2012-10-31 | 2016-06-28 | The Boeing Company | Methods and apparatus to point a payload at a target |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0742812B2 (ja) * | 1986-06-04 | 1995-05-10 | 富士重工業株式会社 | 展開構造物 |
| EP0266026A1 (fr) * | 1986-08-01 | 1988-05-04 | HER MAJESTY THE QUEEN in right of New Zealand Department of Scientific and Industrial Research | Antenne de poursuite |
| DE4117538C1 (fr) | 1991-05-29 | 1992-07-09 | Ant Nachrichtentechnik Gmbh, 7150 Backnang, De | |
| GB9324218D0 (en) * | 1993-11-25 | 1994-01-12 | Renishaw Plc | Position determination machines |
| AU2228897A (en) * | 1997-03-11 | 1998-09-29 | Orbit Communications, Tracking And Telemetry Ltd. | Satellite tracking system |
| US6041500A (en) * | 1998-01-23 | 2000-03-28 | Giddings & Lewis, Inc. | Automatic assembly machine and method utilizing six-axis positioning device |
| US6542132B2 (en) * | 2001-06-12 | 2003-04-01 | Harris Corporation | Deployable reflector antenna with tensegrity support architecture and associated methods |
-
2001
- 2001-05-31 FR FR0107136A patent/FR2825445B1/fr not_active Expired - Fee Related
-
2002
- 2002-05-30 ES ES02743335T patent/ES2402406T3/es not_active Expired - Lifetime
- 2002-05-30 US US10/479,648 patent/US7081866B2/en not_active Expired - Lifetime
- 2002-05-30 KR KR1020037001452A patent/KR100880290B1/ko active IP Right Grant
- 2002-05-30 WO PCT/FR2002/001816 patent/WO2002097920A1/fr not_active Application Discontinuation
- 2002-05-30 EP EP02743335.8A patent/EP1396046B9/fr not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| FR2825445A1 (fr) | 2002-12-06 |
| EP1396046B1 (fr) | 2013-01-02 |
| US7081866B2 (en) | 2006-07-25 |
| ES2402406T3 (es) | 2013-05-03 |
| US20040244525A1 (en) | 2004-12-09 |
| WO2002097920A8 (fr) | 2005-04-07 |
| FR2825445B1 (fr) | 2004-02-13 |
| KR100880290B1 (ko) | 2009-01-23 |
| EP1396046A1 (fr) | 2004-03-10 |
| WO2002097920A1 (fr) | 2002-12-05 |
| KR20030051608A (ko) | 2003-06-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1396046B9 (fr) | Procede d'orientation d'une tourelle hexapode | |
| EP0362342B1 (fr) | Dispositif articule, notamment utilisable dans le domaine de la robotique | |
| CA1256914A (fr) | Mecanisme polyarticule retractile | |
| EP3055726B1 (fr) | Systèmes d'entraînement quasi-linéaires servant à positionner des réflecteurs | |
| EP2880337B1 (fr) | Appareil à mouvement rotatif déplaçant une surface réfléchissante | |
| FR2728695A1 (fr) | Dispositif de commande en rotation de grande precision, notamment pour telescope | |
| EP2767794B1 (fr) | Projectile à gouvernes orientables et procédé de commande des gouvernes d'un tel projectile | |
| EP3045396B1 (fr) | Ensemble de pointage d'un instrument | |
| FR2995090A1 (fr) | Disposition de positionnement angulaire comprenant deux ensembles mecaniques de transmission de mouvement imbriques a deux points morts chacun | |
| FR2498379A1 (fr) | Dispositif d'orientation selon deux axes orthogonaux, utilisation dans une antenne hyperfrequence et antenne hyperfrequence comportant un tel dispositif | |
| EP0172291B1 (fr) | Mécanisme polyarticulé rétractile | |
| EP3213370A1 (fr) | Dispositif d'orientation d'un élément mobile du type plateau d'antenne | |
| FR2550980A1 (fr) | Dispositif de supportage d'un capteur pour une machine automatique et son application a une telle machine | |
| FR2490335A1 (fr) | Horizon artificiel pour aeronef | |
| FR2690532A1 (fr) | Dispositif de pointage pour appareil optique. | |
| WO2012131741A1 (fr) | Suiveur solaire à cinématique parallèle et procédé de commande correspondant | |
| EP3870408B1 (fr) | Procédé de mise en poussée sans glissement d'un outil à l'extrémité d'un bras articulé contre une surface et dispositif pour sa mise en oeuvre | |
| EP2703691B1 (fr) | Dispositif de positionnement angulaire à trois points morts | |
| FR2977823A1 (fr) | Table motorisee pour le positionnement micrometrique | |
| EP0567545B1 (fr) | Dispositif d'orientation et d'ajustement selon au moins l'une des trois directions de l'espace, de la position d'une piece notamment d'une antenne d'emission ou de reception d'ondes electromagnetiques | |
| EP0455543B1 (fr) | Dispositif de pointage d'un réflecteur d'antenne | |
| FR2530831A1 (fr) | Dispositif de deviateur optique variable, application a une optique d'autodirecteur | |
| FR2769969A1 (fr) | Mecanisme de pointage a deux mouvements de rotation independants, sans point mort | |
| EP0229617A1 (fr) | Dispositif d'orientation d'une antenne permettant de réaliser un balayage selon deux directions orthogonales | |
| WO2007003906A2 (fr) | Systeme de positionnement |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20031222 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR |
|
| AX | Request for extension of the european patent |
Extension state: AL LT LV MK RO SI |
|
| 17Q | First examination report despatched |
Effective date: 20040414 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ENERTEC |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ZODIAC DATA SYSTEMS |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 592051 Country of ref document: AT Kind code of ref document: T Effective date: 20130115 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 60244332 Country of ref document: DE Effective date: 20130228 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: MICHELI AND CIE SA, CH |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2402406 Country of ref document: ES Kind code of ref document: T3 Effective date: 20130503 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 592051 Country of ref document: AT Kind code of ref document: T Effective date: 20130102 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: VDEP Effective date: 20130102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130102 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130102 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130502 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130102 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130403 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130102 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20131003 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20130102 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 60244332 Country of ref document: DE Effective date: 20131003 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130530 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: LU Payment date: 20140527 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20140528 Year of fee payment: 13 Ref country code: CH Payment date: 20140612 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20140626 Year of fee payment: 13 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150531 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150531 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150530 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 15 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 16 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150530 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 17 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20200421 Year of fee payment: 19 Ref country code: ES Payment date: 20200602 Year of fee payment: 19 Ref country code: FR Payment date: 20200422 Year of fee payment: 19 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20200423 Year of fee payment: 19 Ref country code: IT Payment date: 20200421 Year of fee payment: 19 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: PC2A Owner name: SAFRAN DATA SYSTEMS Effective date: 20210414 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 60244332 Country of ref document: DE |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20210530 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210530 Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210531 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20220802 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200530 |