EP1228937A1 - Dispositif de guidage des axes d'un vehicule ferroviaire - Google Patents
Dispositif de guidage des axes d'un vehicule ferroviaire Download PDFInfo
- Publication number
- EP1228937A1 EP1228937A1 EP99941663A EP99941663A EP1228937A1 EP 1228937 A1 EP1228937 A1 EP 1228937A1 EP 99941663 A EP99941663 A EP 99941663A EP 99941663 A EP99941663 A EP 99941663A EP 1228937 A1 EP1228937 A1 EP 1228937A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- axles
- actuator
- guiding
- railway vehicle
- fact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61F—RAIL VEHICLE SUSPENSIONS, e.g. UNDERFRAMES, BOGIES OR ARRANGEMENTS OF WHEEL AXLES; RAIL VEHICLES FOR USE ON TRACKS OF DIFFERENT WIDTH; PREVENTING DERAILING OF RAIL VEHICLES; WHEEL GUARDS, OBSTRUCTION REMOVERS OR THE LIKE FOR RAIL VEHICLES
- B61F5/00—Constructional details of bogies; Connections between bogies and vehicle underframes; Arrangements or devices for adjusting or allowing self-adjustment of wheel axles or bogies when rounding curves
- B61F5/38—Arrangements or devices for adjusting or allowing self- adjustment of wheel axles or bogies when rounding curves, e.g. sliding axles, swinging axles
- B61F5/386—Arrangements or devices for adjusting or allowing self- adjustment of wheel axles or bogies when rounding curves, e.g. sliding axles, swinging axles fluid actuated
Definitions
- the dynamic behavior of a railway vehicle is directly conditioned by the design of its suspension.
- This one is installed on the bogie and materializes, in general, in two stages: primary and secondary.
- the primary suspension which is housed between the axles and the chassis of the bogie, is loaded, among other things, stability in operation, to guarantee the guidance of the axles at the passage of a curve, and to obtain a balanced distribution of the vertical load of the wheels.
- the secondary suspension for its part, has the function of filtering the vibrations produced, in particular, wheel-rail contact. In this way, an acceptable level of comfort is insured for the passenger.
- the longitudinal and transverse guidance rigidities can be materialize in different ways.
- the joint use of elastomeric elements with other metal is perhaps the most common at the moment.
- the form geometric part and distribution of elastomer and metal parts allow to offer a wide variety of rigidity values, not only in a direction, but also in several at once.
- an elastomeric spring has stiffness characteristics defined by its geometry and by the mechanical behavior of the elastomer. These characteristics are little dependent on frequency. In the required conditions, who are required to the axle guiding device of a vehicle, it is observed that the value longitudinal stiffness to achieve optimum vehicle behavior, in all directions, should be variable depending on the situation; low rigidity in almost static movements related to curve circulation; and a high value for high speed traffic.
- the invention presented consists of a new device for guiding the elasto-hydraulic type, applicable to railway rolling stock which consists of a conventional elastic articulation, on which cavities have been made or sealed and symmetrical chambers, inside, on both sides of the axle of the room and in the longitudinal direction. These rooms are completely filled with a fluid hydraulic and are communicating with each other by means of a duct of small section.
- the combination of the elastomeric element with the damping effect of the passage of the fluid hydraulically from one chamber to another through a narrow passage provides a guiding device which offers, at the same time, low values of rigidity for low frequency movements, such as those occurring in the curve circulation; and high values for movements with a frequency higher.
- the dimensions of the elastomer, fluid chambers, duct intercommunication, as well as the mechanical properties of the elastomer and the fluid hydraulics allow easy adaptation to different vehicle requirements rail.
- the elasto-hydraulic articulation which is the object of this patent, is designed to be installed on an articulated grease box and in the absence of between them, in other words, in the absence of friction elements, with which avoid games in the stability of the vehicle.
- the presented articulation is designed to materialize the rigidities longitudinal and transverse guide device of a railway vehicle. This device is housed in the point of articulation of the grease box with the chassis of the bogie, that is why it does not need any additional element or mechanism for uncouple vertical movement from longitudinal and lateral movements.
- the hinge is composed of an outer hoop, which is joined to the axle grease box, and by an inner axle which is connected to the chassis of the truck (or vice versa). Both are metallic elements. Between them, we vulcanize the elastomer with two cavities or chambers, on each side of the axis of the part in the longitudinal direction. Both chambers, which are filled with hydraulic fluid, are united to each other by means of a narrow duct, housed in the same axis of the room, which allows the passage of fluid from one chamber to another, depending on the displacement relative longitudinal axis of the hinge relative to the outer hoop.
- the axle Apart from the intercommunication conduit between the two chambers, the axle includes two other ducts by means of which each chamber is in connection with the outside. These ducts, which are used to clean and fill articulation, are useful in maintenance work. During operation normally, the pipes are closed by plugs screwed to the body of the axle.
- the rigidity versus frequency curve presented by articulation is controlled through the appropriate selection of geometric parameters and mechanical properties of the elastomer and the hydraulic fluid. Among them, it is necessary indicate the following: axial length of the chambers Lc, length of the duct Lp intercommunication, diameter of the intercommunication conduit Dp, module of Young E elastomer and viscosity of hydraulic fluid ⁇ . With all these parameters, we define the appropriate behavior of the part, either through a theoretical approach, either through an experimental study, or both. This behavior will have to be according to the characteristics of the vehicle.
- the joint needs no external intervention during its entire useful life, except for maintenance work.
- the device presented can be used in active type axle guidance applications.
- the setting up axles radially to the track allows for better behavior of the vehicle when it circulates in curve.
- the orientation of the axles in radial position at the curve can be achieved through the use of an active mechatronic system.
- a possibility consists of a configuration in which we set up actuators in the longitudinal direction, between the grease boxes and the bogie frame. When the vehicle enters a bend, hydraulic fluid is injected into a chamber and fluid is extracted from the other. So, the actuator will move properly each end of the axle so that the latter adopts the radial position.
- An elastic joint like the one described previously, can be used for this purpose, if the chamber filling ducts are used for supply / extract hydraulic fluid therefrom. In this way, we succeed in simulating the behavior of a hydraulic cylinder locked in the bogie between the chassis and the box to grease.
- the intercommunication conduit between the two chambers can be retained or eliminated, depending on the behavior that we want to give to the guiding device, in the case where it would disconnect.
- Joints used as hydraulic cylinders can be connected to either a hydraulic distribution valve (proportional valve, servodistributeur ...) is a reversible pump responding to the signal that comes from a axle guidance control equipment. They will all be called below dispensing devices.
- Figure 1 shows a cross section of the joint, in which one observes the two fluid chambers interconnected with each other.
- Figure 2 is a longitudinal section of the same joint, where the intercommunication conduits can be observed in more detail.
- Figure 3 shows a side view of the entire joint.
- Figure 4 shows a side view of a half boogie, where is indicated the location of the joint proposed in this document.
- Figure 5 shows the same section of the joint that is shown in Figure 1, but deformed by the action of a force applied between the axle and the carcass.
- Figure 6 is the section of the joint, when it works as actuator.
- the ducts drawn on the axles are connected, outside, to both chambers of the actuator joint.
- FIG. 7 is the same section as that represented in FIG. 6, when hydraulic fluid is introduced into chamber B and removed from chamber A.
- FIG. 8 is a schematic plan view of an equipped bogie axle guidance actuators when the vehicle is traveling in a straight line.
- FIG. 9 is the same view as that of FIG. 8, when the vehicle takes a turn.
- the axles adopt a radial position with respect to the track, thanks to the action of the actuators.
- Figures 10 to 19 show ten different possible configurations bogie equipped with a combination of actuators and dispensing devices.
- a preferred embodiment is presented, non-limiting, of a joint. Then we present a variant that works as a cylinder or hydraulic actuator, and a series of truck configurations axle with an active hydraulic axle steering system, based on the proposed actuator joint.
- FIGS 1 and 2 show the sections of the joint proposed.
- the hinge consists of an axle 2 and an outer hoop 1 metal, between which is vulcanized an elastomer 3.
- Both rooms are connected, each of them, to a conduit 7 to communicate with the outside.
- Both cavities 5 and 6, and the three ducts 4 and 7 are filled with hydraulic fluid.
- the ducts 7 are plugged to outside by means of a conventional screw cap.
- the articulation unites the grease box (9) and the bogie frame (8), the internal chamber (6) on the side of the bogie frame and the outer chamber (5) of the side of the grease box or element directly linked to this grease box, in other words, any element uniting the axle to the primary suspension.
- each room would be arranged on the side of each grease box ( Figure 17).
- cavities 5 and 6 are shown completely. dipped in elastomer 3 because this is considered the optimal solution, but the elastomer serves to separate the chamber cavities and to connect the band 1 to the axle 2, the object of the invention, the cavities being, accordingly, delimited by the metal parts frette 1, axle 2.
- FIG. 4 shows a side view of a bogie with articulated grease boxes 9 on the bogie frame 8.
- the articulation represented as a whole with reference 10, is placed between the grease box 9 and the bogie frame 8.
- the circulation of the fluid by the calibrated pitch having an effective length Lp and a diameter Dp is due to the difference in pressure between the two chambers 5 and 6.
- the flow rate can be considered as being proportional to the difference in pressure between the chambers 5 and 6, and it is even larger than the difference in pressures existing at the ends of the duct is large.
- the viscosity of the fluid used has a direct influence on the ratio flow / pressure difference.
- the flow rate is inversely proportional to the viscosity of the fluid used. Due to the characteristics of the application and the reduced available space, oils and lubricants with viscosities ranging between 10 and 1000 mm 2 / s are used.
- the described phenomenon ensures a dissipative effect on the joint.
- the stiffness offered by the joint is very low and has a value close to the rigidity of the joint without hydraulic fluid.
- the joint offers a high value of rigidity, which approaches that which would have the joint with the duct 4 closed.
- the stiffness of the joint takes intermediate values between the two previous limits.
- the longitudinal suspension of the primary of a bogie provides an optimum behavior of the vehicle in the ciruclation in curve and in circulation in a straight line.
- the hinge 10 can function as a hydraulic cylinder, if the filling ducts 7 are connected to a device for external hydraulic distribution such as, for example, a proportional valve, a servodistributor or servovalve; or a reversible hydraulic pump.
- a device for external hydraulic distribution such as, for example, a proportional valve, a servodistributor or servovalve; or a reversible hydraulic pump.
- Figures 6 and 7 show a cross section of the articulation-actuator. In this case, the intercom communication channel 4 has disappeared (or the one that exists has been plugged).
- the filling ducts 7 are used for extracting or introducing hydraulic fluid from the chambers 5 and 6 of the joint.
- FIG. 6 shows the case where the two chambers 5 and 6 are full and in balance.
- Axle 2 is centered with respect to carcass 1.
- FIG. we drew the same section, but after extracting a quantity of hydraulic fluid of the chamber 5 (the chamber A) and to introduce it into the chamber 6 (the chamber B). Of the displacement of the fluid, the elastomer deforms and the axle 2 approaches the outer casing 1, the side of the chamber 5, which loses part of its initial volume.
- the main advantage offered by the use of an articulation-actuator is that in a single device a hydraulic cylinder and an elastic spring.
- the first is materialized by the existence of two chambers on each side of the axle of the joint, which may be more or less filled to obtain the relative axle-hoop displacement that is desired.
- the chambers are immersed in the elastomer, their walls are elastic; so that when you want to generate a relative displacement in the joint thanks to the supply of hydraulic fluid in one of the chambers, it is necessary to deform the walls to that the cavity increases in volume. This deformation is caused by the displacement of the axle of the hinge relative to the hoop.
- the articulating-ager thus conceived operates as a spring having a rigidity Kxl, in case there is a failure in the active guidance system such as, for example, the total loss or partial hydraulic fluid of the installation.
- Figures 8 and 9 show a simplified plan view of a bogie with 4 articulating joints housed between the bogie frame 8 and the boxes grease 9.
- each actuator joint is centered and keep the axles 12 parallel to each other. This is the position taken for the circulation in a straight line.
- FIG. 9 the same bogie is represented on which each actuator joint has deformed in a suitable manner so that the axles 12 adopt a radial position with respect to the turn (the axles are perpendicular to the axis of the track).
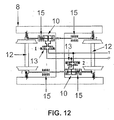
- the radial position of the axles can be obtained from multiple ways. In Figures 10-19, some of them are presented. The difference existing between them is based on 3 ideas: the number of joints-actuator installed per bogie -4, 2 or 1-, the number of hydraulic distribution elements used by bogie -4, 2, 1-, and the type of interconnection between them. In the figures shown, we have represented a proportional valve, although other dispensing devices such as, for example, a reversible hydraulic pump.
- the active guidance system is based on four actuator hinges 10 individually connected to four distribution valves 13.
- the assembly formed by the actuator hinge 10 and the valve 13 is responsible for ensuring a relative displacement suitable between the grease box 9 and the bogie frame 8 so that the axles 12 are placed in radial position. If R is the radius of curvature, S the half-wheelbase of the bogie and Lkl the half-distance between the articulations-cylinder in the transverse direction, the relative displacements between bogie frame - grease box, which must be ensured.
- the actuator-joints 10 exert a force between the axle 2 and the outer band 1 proportional to the target signal sent.
- f 1 the force that must be exerted by the actuator joint "i”
- K a proportionality factor around the unit and which can take account of circulation factors such as speeds, uncompensated lateral accelerations, radii of curvature
- the lines shown in the figure, such as P and T are, respectively, the hydraulic pressure tap and the hydraulic fluid return line. Both are specific to a conventional hydraulic installation.
- Figure 12 shows a variant of that shown in Figure 11, where the actuator joints are placed diagonally, each of them on a different beam.
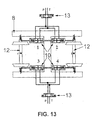
- FIG. 13 is a simplification of the Figure 10.
- four actuator joints are used.
- actuator joints on the same side or bogie beam have been suitably interconnected, their respective rooms being connected, the rooms 5 between them and the chambers 6 between them, so that, in a circulation, the valve 13 being closed, the condition of distance remains constant between the grease boxes 9 which are Coupled the actuator-joints of a spar. So, the relative angle enter the two axles 12 remains constant.
- a configuration such as that shown in FIG. 13 provides better levels of stability than Figure 10, with a cost price lower and a simpler installation.
- FIG. 14 there is shown a simplified variant of the configuration of Figure 13, where only two actuator joints are used and one bogie valve.
- the chambers of the joints-actuator are united as shown in Figure 13 and the rotation centers of Figure 11.
- Figure 15 shows a variant of the previous (by reversing the communication correspondence between the rooms) where the two actuator joints have been installed on different beams of the bogie.
- Figure 18 is a simplification of that of the FIG. 17, in which only an actuator joint and a valve are used of distribution installed on one of the beams of the bogie.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Vehicle Body Suspensions (AREA)
- Platform Screen Doors And Railroad Systems (AREA)
- Metal Rolling (AREA)
- Steering Controls (AREA)
Abstract
Description
- . Ressorts et amortisseurs verticaux. Ceux-ci sont chargés d'assurer la répartition équilibrée de la charge verticale sur les roues d'un même bogie.
- . Dispositif de guidage. Il agit essentiellement dans le plan horizontal et, outre la fonction de guider les essieux, dans leur roulement sur la voie, il a pour mission d'assurer la connexion entre le bogie et les essieux, en garantissant la transmission des efforts de traction et de freinage, et en offrant une stabilité de marche au véhicule.
- Des soupapes de distribution (proportionnelles, ...)
- Une pompe hydraulique réversible
- Une loi de contrôle en déplacement
- Une loi de contrôle en force
- Un dispositif hydraulique conventionnel (cylindre)
- Des actionneurs d'une autre technologie remplissant la même fonction.
- Un essieu monté, un essieu de roues indépendant, à largeur variable.
- Des bogies à un seul essieu.
Claims (18)
- Dispositif de guidage des essieux d'un véhicule ferroviaire, se caractérisant par le fait qu'il dispose, entre deux éléments mobiles entre eux de son bogie, d'une articulation-actionneur au moins, qui se compose de:a).- une frette extérieure unie à l'un des éléments mobiles;b).- un axe intérieur uni à l'autre des éléments mobiles;c).- un ensemble élastomère qui unit la frette extérieure à l'axe intérieur, formant deux chambres étanches entre la frette extérieure et l'axe intérieur, l'une interne et l'autre externe, remplies de fluide, l'interne étant du côté de l'un des éléments mobiles et l'externe du côté de l'autre élément mobile;d).- des moyens pour faire communiquer ces chambres entre elles.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la revendication précédente, se caractérisant par le fait que les moyens pour faire communquer ces chambres entre elles se composent de deux conduits, un pour chacune d'elles, qui connectent les chambres à un dispositif de distribution fluidique extérieur.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon les revendications précédentes, se caractérisant par le fait que le matériel roulant se compose d'un bogie ayant au moins un essieu, en disposant que dans l'articulation-actionneur, l'un des éléments mobiles soit une boíte à graisse de l'un des essieux et que l'autre élément mobile soit le châssis du bogie.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon les revendications précédentes, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur pour chaque boíte à graisse;b).- d'un dispositif de distribution fluidique pour chaque articulation-actionneur;
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première à la troisième revendication, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur pour la boíte à graisse d'un même longeron de bogie;b).- d'un dispositif de distribution fluidique pour chaque articulation-actionneur.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première à la troisième revendication, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur pour chacune des boítes à graisse disposées en diagonale, chacune sur un longeron du bogie;b).- d'un dispositif de distribution fluidique pour chaque articulation-actionneur.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première à la troisième revendication, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur pour chaque boíte à graisse;b).- d'un dispositif de distribution fluidique commun aux articulations-actionneurs d'un même longeron de bogie, dont les chambres étanches sont unies, les internes d'une part, et les externes de l'autre.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première à la troisième revendication, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur pour chaque boíte à graisse d'un même longeron de bogie;b).- d'un dispositif de distribution fluidique commun aux articulations-actionneurs dont les chambres étanches sont connectées entre elles, les internes, d'une part, et les externes, de l'autre.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première à la troisième revendication, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur pour chacune des deux boítes à graisse disposées en diagonale, chacune sur un longeron de bogie;b).- un dispositif de distribution fluidique pour les deux articulations-actionneur, dont les deux chambres étanches sont connectées en inversant la correspondance;
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première à la troisième revendication, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur pour chaque boíte à graisse;b).- d'un dispositif de distribution fluidique commun aux articulations-actionneur, qui ont:b1) pour chaque longeron de bogie, les deux chambres internes connectées entre elles, d'une part, et les externes, de l'autre;b2) les chambres internes d'un longeron de bogie sont unies aux chambres externes de l'autre longeron de bogie.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première et la deuxième revendications, se caractérisant par le fait que les éléments mobiles sont constitués par une boíte à graisse d'un essieu des roues d'un véhicule ferroviaire, l'autre élément mobile étant une autre boíte à graissez de l'essieu des autres roues du bogie.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la onzième revendication, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur, au moins, sur un longeron de bogie;b).- d'un dispositif de distribution fluidique pour chaque articulation-actionneur.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la onzième revendication, se caractérisant par le fait qu'il dispose:a).- d'une articulation-actionneur sur chaque logneron de bogie;b).- d'un dispositif de distribution fluidique commun aux articulations-actionneur, dont les chambres étanches sont unies en inversant la correspondance.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première revendication, se caractérisant par le fait que les moyens permettant de faire communiquer les chambres entre elles comprennent un conduit calibré qui les met en rapport.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la quatorzième revendication, se caractérisant par le fait que le conduit calibré est pratiqué dans l'essieu intérieur.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première revendication, se caractérisant par le fait que la frette extérieure et l'essieu intérieur sont coaxiaux et les deux chambres étanches sont complètement plongées dans l'ensemble élastomère et disposées de chaque côté de l'essieu.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la seizième revendication, se caractérisant par le fait que les chambres s'étendent longitudinalement et sur un arc de circonférence par rapport à la frette extérieure.
- Dispositif de guidage des essieux d'un véhicule ferroviaire, selon la première revendication, se caractérisant par le fait que le fluide, qui remplit les chambres étanches, a une viscosité comprise entre 10 et 1000 mm2/s.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/ES1999/000281 WO2001015954A1 (fr) | 1999-08-31 | 1999-08-31 | Dispositif de guidage des axes d'un vehicule ferroviaire |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1228937A1 true EP1228937A1 (fr) | 2002-08-07 |
| EP1228937B1 EP1228937B1 (fr) | 2004-09-22 |
Family
ID=8307286
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP99941663A Expired - Lifetime EP1228937B1 (fr) | 1999-08-31 | 1999-08-31 | Dispositif de guidage des axes d'un vehicule ferroviaire |
Country Status (7)
| Country | Link |
|---|---|
| EP (1) | EP1228937B1 (fr) |
| AT (1) | ATE276909T1 (fr) |
| DE (1) | DE69920527T2 (fr) |
| DK (1) | DK1228937T3 (fr) |
| ES (1) | ES2228090T3 (fr) |
| PT (1) | PT1228937E (fr) |
| WO (1) | WO2001015954A1 (fr) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102407861A (zh) * | 2011-10-14 | 2012-04-11 | 同济大学 | 机械式半主动铁道车辆转向架径向导向装置 |
| DE102013103827A1 (de) | 2013-04-16 | 2014-10-16 | Bombardier Transportation Gmbh | Fahrwerk mit quergekoppelten Radeinheiten |
| US20160304103A1 (en) * | 2013-11-29 | 2016-10-20 | Siemens Aktiengesellschaft | Chassis for a rail vehicle |
| EP3205549A1 (fr) | 2016-02-15 | 2017-08-16 | Bombardier Transportation GmbH | Ensemble guide d'essieu de roue avec des convertisseurs hydromécaniques longitudinaux et train de roulement associé |
| AT518973A1 (de) * | 2016-03-17 | 2018-02-15 | Siemens Ag Oesterreich | Fahrwerk für ein Schienenfahrzeug |
| WO2018095961A1 (fr) * | 2016-11-24 | 2018-05-31 | Siemens Ag Österreich | Système de commande de roues pour bogie |
| CN108372867A (zh) * | 2018-04-09 | 2018-08-07 | 西南交通大学 | 一种径向转向架迫导向机构 |
| EP3978330A1 (fr) * | 2020-09-30 | 2022-04-06 | Siemens Mobility Austria GmbH | Élément élastique et châssis |
| WO2022128299A1 (fr) * | 2020-12-16 | 2022-06-23 | Siemens Mobility GmbH | Ensemble de transmission de forces longitudinales dans un véhicule ferroviaire |
| WO2022128301A1 (fr) * | 2020-12-16 | 2022-06-23 | Siemens Mobility GmbH | Ensemble pour transmettre des forces longitudinales dans un véhicule ferroviaire |
| EP4155160A1 (fr) * | 2021-09-23 | 2023-03-29 | Siemens Mobility Austria GmbH | Raccord d'alimentation pour un dispositif de direction de roue, dispositif de direction de roue pour un châssis et châssis |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10310634A1 (de) * | 2003-03-10 | 2004-09-30 | Carl Freudenberg Kg | Achslenkerlager |
| DE10310633A1 (de) * | 2003-03-10 | 2004-09-30 | Carl Freudenberg Kg | Buchse für ein Lager zur elastischen Verbindung von Teilen eines Laufwerks |
| EP2353961A1 (fr) * | 2010-02-01 | 2011-08-10 | Stadler Bussnang AG | Bogie pour un véhicule sur rail |
| RU2542851C2 (ru) * | 2012-12-14 | 2015-02-27 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Елецкий государственный университет им. И.А. Бунина" | Тележка тепловоза |
| DE102014003506A1 (de) * | 2014-03-14 | 2015-09-17 | Carl Freudenberg Kg | Hydrobuchsenanordnung |
| RU2553401C1 (ru) * | 2014-03-18 | 2015-06-10 | Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Елецкий государственный университет им. И.А. Бунина" | Колёсно-моторный блок тепловоза |
| DE102014214055A1 (de) * | 2014-07-18 | 2016-01-21 | Siemens Aktiengesellschaft | Fahrwerk für ein Schienenfahrzeug |
| GB2579344B (en) * | 2018-11-05 | 2021-04-07 | Bombardier Transp Gmbh | Rail vehicle wheel axle guiding assembly with load-dependent pressurising means |
| CN113931051B (zh) * | 2021-12-07 | 2023-04-28 | 绿城体育集团股份有限公司 | 一种防偏差的塑胶跑道划线装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1273155A (fr) * | 1959-11-11 | 1961-10-06 | Maschf Augsburg Nuernberg Ag | Dispositif pour inscrire dans les courbes les bogies à un ou plusieurs essieux des véhicules ferroviaires |
| DE3123858A1 (de) * | 1981-06-16 | 1982-12-30 | Fried. Krupp Gmbh, 4300 Essen | Laufwerk fuer ein schienenfahrzeug |
| DE3331559A1 (de) * | 1983-09-01 | 1985-03-28 | Thyssen Industrie Ag, 4300 Essen | Achssteuerung fuer schienenfahrzeuge |
| JPS62101575A (ja) * | 1985-10-28 | 1987-05-12 | 川崎重工業株式会社 | 鉄道用台車 |
| DE3706180A1 (de) * | 1987-02-26 | 1988-09-08 | Messerschmitt Boelkow Blohm | Fahrwerk fuer ein schienenfahrzeug |
| FR2624081A1 (fr) * | 1987-12-03 | 1989-06-09 | Alsthom | Vehicule a essieux orientables |
| DE4240098A1 (de) * | 1992-11-28 | 1994-06-01 | Krupp Verkehrstechnik Gmbh | Fahrwerk für Schienenfahrzeuge |
| AT407140B (de) * | 1993-11-26 | 2000-12-27 | Integral Verkehrstechnik Ag | Einrichtung zur steuerung eines rades, insbesondere eines radsatzes eines schienenfahrzeuges |
| DE4343608C2 (de) * | 1993-12-16 | 1995-10-12 | Rexroth Mannesmann Gmbh | Anordnung zur Übertragung von Bewegungen und Kräften zwischen Bauteilen insbesondere von Schienenfahrzeugen |
| DE19715148A1 (de) * | 1997-04-11 | 1998-10-15 | Deutsche Waggonbau Ag | Verfahren und Einrichtung zur Radsatzführung von Schienenfahrzeugen |
-
1999
- 1999-08-31 DE DE69920527T patent/DE69920527T2/de not_active Expired - Lifetime
- 1999-08-31 EP EP99941663A patent/EP1228937B1/fr not_active Expired - Lifetime
- 1999-08-31 AT AT99941663T patent/ATE276909T1/de active
- 1999-08-31 WO PCT/ES1999/000281 patent/WO2001015954A1/fr active IP Right Grant
- 1999-08-31 PT PT99941663T patent/PT1228937E/pt unknown
- 1999-08-31 ES ES99941663T patent/ES2228090T3/es not_active Expired - Lifetime
- 1999-08-31 DK DK99941663T patent/DK1228937T3/da active
Non-Patent Citations (1)
| Title |
|---|
| See references of WO0115954A1 * |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102407861A (zh) * | 2011-10-14 | 2012-04-11 | 同济大学 | 机械式半主动铁道车辆转向架径向导向装置 |
| DE102013103827A1 (de) | 2013-04-16 | 2014-10-16 | Bombardier Transportation Gmbh | Fahrwerk mit quergekoppelten Radeinheiten |
| WO2014170234A1 (fr) * | 2013-04-16 | 2014-10-23 | Bombardier Transportation Gmbh | Châssis pourvu d'ensembles roue couplés transversalement |
| US10246107B2 (en) * | 2013-11-29 | 2019-04-02 | Siemens Mobility GmbH | Chassis for a rail vehicle |
| US20160304103A1 (en) * | 2013-11-29 | 2016-10-20 | Siemens Aktiengesellschaft | Chassis for a rail vehicle |
| EP3205549A1 (fr) | 2016-02-15 | 2017-08-16 | Bombardier Transportation GmbH | Ensemble guide d'essieu de roue avec des convertisseurs hydromécaniques longitudinaux et train de roulement associé |
| AT518973B1 (de) * | 2016-03-17 | 2021-06-15 | Siemens Mobility Austria Gmbh | Fahrwerk für ein Schienenfahrzeug |
| AT518973A1 (de) * | 2016-03-17 | 2018-02-15 | Siemens Ag Oesterreich | Fahrwerk für ein Schienenfahrzeug |
| WO2018095961A1 (fr) * | 2016-11-24 | 2018-05-31 | Siemens Ag Österreich | Système de commande de roues pour bogie |
| CN108372867A (zh) * | 2018-04-09 | 2018-08-07 | 西南交通大学 | 一种径向转向架迫导向机构 |
| EP3978330A1 (fr) * | 2020-09-30 | 2022-04-06 | Siemens Mobility Austria GmbH | Élément élastique et châssis |
| WO2022128299A1 (fr) * | 2020-12-16 | 2022-06-23 | Siemens Mobility GmbH | Ensemble de transmission de forces longitudinales dans un véhicule ferroviaire |
| WO2022128301A1 (fr) * | 2020-12-16 | 2022-06-23 | Siemens Mobility GmbH | Ensemble pour transmettre des forces longitudinales dans un véhicule ferroviaire |
| EP4155160A1 (fr) * | 2021-09-23 | 2023-03-29 | Siemens Mobility Austria GmbH | Raccord d'alimentation pour un dispositif de direction de roue, dispositif de direction de roue pour un châssis et châssis |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2228090T3 (es) | 2005-04-01 |
| DK1228937T3 (da) | 2005-01-24 |
| DE69920527D1 (de) | 2004-10-28 |
| WO2001015954A1 (fr) | 2001-03-08 |
| PT1228937E (pt) | 2005-02-28 |
| EP1228937B1 (fr) | 2004-09-22 |
| DE69920527T2 (de) | 2005-09-29 |
| ATE276909T1 (de) | 2004-10-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1228937A1 (fr) | Dispositif de guidage des axes d'un vehicule ferroviaire | |
| FR2661643A1 (fr) | Suspension de vehicule de type hydropneumatique notamment pour vehicules automobiles. | |
| EP3650304B1 (fr) | Bogie pour véhicule ferroviaire | |
| CA2682931A1 (fr) | Bogie pour vehicule ferroviaire | |
| EP3556635B1 (fr) | Véhicule ferroviaire et procédé de circulation associé | |
| FR2624081A1 (fr) | Vehicule a essieux orientables | |
| EP0893321A1 (fr) | Dispositif de suspension oléopneumatique anti-roulis ou anti-lacet | |
| CA1196818A (fr) | Dispositif de suspension et de liaison entre un chassis de bogie et une boite d'essieu | |
| EP3918226B1 (fr) | Butee hydraulique de suspension de vehicule automobile a masse inertielle | |
| FR2833231A1 (fr) | Dispositif de suspension pour vehicule sur rails | |
| EP0032079B1 (fr) | Véhicule articulé, notamment autobus articulé | |
| FR3073174B1 (fr) | Amortisseur hydraulique de suspension de vehicule avec colonne a inertie | |
| EP0420940B1 (fr) | Dispositif d'application de force sur la caisse d'un vehicule ferroviaire, pour l'inclinaison de caisse ou la stabilisation transversale du vehicule | |
| EP3863869B1 (fr) | Butee hydraulique a inertie de fin de course de suspension de vehicule automobile | |
| FR2812704A1 (fr) | Actionneur | |
| FR2503641A1 (fr) | Dispositif d'amortissement pour suspension de vehicule | |
| FR3015371A1 (fr) | Suspension hydropneumatique pour vehicule automobile comportant un verin a double effet relie a deux accumulateurs de pression | |
| CA2067717A1 (fr) | Dispositif pilote de liaison elastique assurant des rigidites differenciees par chambre tubulaire piezo-raidie | |
| EP2152562B1 (fr) | Système de guidage bidirectionnel à limitation de débattement latéral, pour un essieu routier guidé par un rail au sol | |
| FR3090548A1 (fr) | Système de traction électrique modulaire | |
| FR2926492A1 (fr) | Sous ensemble de train roulant de vehicule | |
| FR2766444A1 (fr) | Dispositif oleopneumatique a amortissement du roulis | |
| WO1996015005A1 (fr) | Dispositif d'asservissement passif de la precontrainte des suspensions d'un vehicule | |
| FR2989948A1 (fr) | Systeme autonome de lubrification embarque de boudin de roue de bogie de vehicule ferroviaire | |
| FR3141495A1 (fr) | Butée hydraulique de fin de course de suspension à inertie progressive. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20020325 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| RAP3 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: METALOCAUCHO, S.L. Owner name: CONSTRUCCIONES Y AUXILIAR DE FERROCARRILES S.A. CA |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: FRENCH |
|
| REF | Corresponds to: |
Ref document number: 69920527 Country of ref document: DE Date of ref document: 20041028 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: BRAUN & PARTNER PATENT-, MARKEN-, RECHTSANWAELTE |
|
| REG | Reference to a national code |
Ref country code: GR Ref legal event code: EP Ref document number: 20040403971 Country of ref document: GR |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20050107 |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20041214 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2228090 Country of ref document: ES Kind code of ref document: T3 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050831 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20050831 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20050831 |
|
| 26N | No opposition filed |
Effective date: 20050623 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GR Payment date: 20130822 Year of fee payment: 15 Ref country code: NL Payment date: 20130815 Year of fee payment: 15 Ref country code: SE Payment date: 20130821 Year of fee payment: 15 Ref country code: PT Payment date: 20130228 Year of fee payment: 15 Ref country code: ES Payment date: 20130827 Year of fee payment: 15 Ref country code: IE Payment date: 20130829 Year of fee payment: 15 Ref country code: FI Payment date: 20130813 Year of fee payment: 15 Ref country code: DK Payment date: 20130821 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20130823 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20130827 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20130823 Year of fee payment: 15 |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: MM4A Free format text: LAPSE DUE TO NON-PAYMENT OF FEES Effective date: 20150302 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: V1 Effective date: 20150301 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP Effective date: 20140831 |
|
| REG | Reference to a national code |
Ref country code: GR Ref legal event code: ML Ref document number: 20040403971 Country of ref document: GR Effective date: 20150304 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140831 Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150301 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140831 Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150302 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140831 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20150304 Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140901 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20150430 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140901 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140831 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20160127 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20140901 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: NEW ADDRESS: HOLEESTRASSE 87, 4054 BASEL (CH) |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20180927 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20180927 Year of fee payment: 20 Ref country code: CH Payment date: 20180927 Year of fee payment: 20 Ref country code: AT Payment date: 20180919 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 69920527 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20190830 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK07 Ref document number: 276909 Country of ref document: AT Kind code of ref document: T Effective date: 20190831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20190830 |