EP1018479A2 - Traverse device for automatic winder - Google Patents
Traverse device for automatic winder Download PDFInfo
- Publication number
- EP1018479A2 EP1018479A2 EP99124772A EP99124772A EP1018479A2 EP 1018479 A2 EP1018479 A2 EP 1018479A2 EP 99124772 A EP99124772 A EP 99124772A EP 99124772 A EP99124772 A EP 99124772A EP 1018479 A2 EP1018479 A2 EP 1018479A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- traverse
- clutch
- yarn
- mechanism section
- output gear
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H54/00—Winding, coiling, or depositing filamentary material
- B65H54/02—Winding and traversing material on to reels, bobbins, tubes, or like package cores or formers
- B65H54/28—Traversing devices; Package-shaping arrangements
- B65H54/2821—Traversing devices driven by belts or chains
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H54/00—Winding, coiling, or depositing filamentary material
- B65H54/02—Winding and traversing material on to reels, bobbins, tubes, or like package cores or formers
- B65H54/38—Arrangements for preventing ribbon winding ; Arrangements for preventing irregular edge forming, e.g. edge raising or yarn falling from the edge
- B65H54/388—Preventing the yarn from falling off the edge of the package
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H54/00—Winding, coiling, or depositing filamentary material
- B65H54/70—Other constructional features of yarn-winding machines
- B65H54/74—Driving arrangements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H63/00—Warning or safety devices, e.g. automatic fault detectors, stop-motions ; Quality control of the package
- B65H63/02—Warning or safety devices, e.g. automatic fault detectors, stop-motions ; Quality control of the package responsive to reduction in material tension, failure of supply, or breakage, of material
- B65H63/024—Warning or safety devices, e.g. automatic fault detectors, stop-motions ; Quality control of the package responsive to reduction in material tension, failure of supply, or breakage, of material responsive to breakage of materials
- B65H63/036—Warning or safety devices, e.g. automatic fault detectors, stop-motions ; Quality control of the package responsive to reduction in material tension, failure of supply, or breakage, of material responsive to breakage of materials characterised by the combination of the detecting or sensing elements with other devices, e.g. stopping devices for material advancing or winding mechanism
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2701/00—Handled material; Storage means
- B65H2701/30—Handled filamentary material
- B65H2701/31—Textiles threads or artificial strands of filaments
Definitions
- the present invention relates to a belt traverse device used for an automatic winder apparatus for winding a yarn, and in particular, to a mechanism for preventing-a traverse device from being reversibly rotated due to a drum reverse rotation operation during knotting.
- An automatic winder apparatus for winding a yarn to form a package Is generally composed of a yarn winding device and a yarn traverse device and uses a drive force from a drive source such as a motor to form a package by using the winding device to rewind a yarn around a take-up tube while using the traverse device to laterally reciprocate (traverse) the yarn.
- a drive source such as a motor
- a drum of the winding device must be reversibly rotated in order to capture the yarn wound around the package.
- the drum and the belt traverse device are Interlocked with each other via a gear or belt, so the belt traverse device is reversibly rotated in synchronism with the drum.
- the belt traverse device While the belt traverse device is being reversibly rotated and when an upper yarn suction member (a suction pipe) captures an upper yarn, draws it out from the package, and threads a splicing device with the yarn, the drawn-out upper yarn may be caught in the traverse device.
- the belt traverse device has traverse guides each attached to one position on the circumference of each of two belts that rotate in opposite directions so that one of the guides can deliver a yarn to the other guide, thereby implementing the smooth and reliable reciprocating motion of the yarn.
- this belt traverse device is reversibly rotated, the roles of the traverse guide delivering the yarn at a traverse end and of the traverse guide receiving it are reversed to prevent the functioning of a yarn removal guide for forward rotations that supplements the exchange of the yarn between the traverse guides. As a result, the yarn may be caught at the traverse end.
- a lateral pair of traverse guide having different shapes and an additional yarn removal guide operative during reverse rotations have been proposed but have not completely solved the catching problem partly due to the small tension of the yarn during rewinding for splicing compared to normal winding.
- a clutch device is interposed between a drive source and a traverse mechanism section, and when knotting operation is carried out, the clutch device is disconnected to block power transmission to the traverse mechanism section.
- a clutch device is interposed between a drive source and a traverse mechanism section, the clutch device can be connected only with a set phase, and the rotational movement of a drum of a winding device synchronizes with the reciprocating movement of the traverse mechanism section.
- the clutch device comprises a ball clutch comprising an output gear having a plurality of balls buried therein and a clutch plate having a plurality of clutch holes, and the output gear and the clutch plate mesh with each other only with a set phase.
- FIG. 1 shows the entire configuration of an automatic winder 50 incorporating a belt traverse device T according to the present invention.
- the illustrated automatic winder 50 unwinds a yarn S from a supplying package 60, passes it along a guide 57, and rewinds it around a tapered take-up tube Q that is rotationally driven by a drum 6.
- the traverse device T traverses the yarn S while increasing or reducing the speed at a constant cycle optimum for formation of a corn winding package.
- a yarn defect detector 53 monitors the yarn S for a defect and a tenser 56 adjusts the tension of the yarn S.
- a motor 2 stops driving a drum 6, and a cutter provided in the yarn defect detector 53 cuts the yarn S.
- a supplying side section (a lower yarn) of the cut yarn S is sucked by a lower yarn suction pipe 55 that constantly carries out suction.
- the winding side portion (an upper yarn) of the cut yarn S is wound to the package by the drum 6 that makes inertial rotations.
- the drum 6 is reversibly rotated to feed out a small amount of the yarn S, and an upper yarn suction member 58 is swiveled upward to capture the upper yarn and is then swiveled downward again to guide the captured upper yarn to the splicing device 52.
- the lower yarn suction member 54 is swiveled downward to capture the lower yarn sucked in the lower yarn suction pipe 55 and is then swiveled upward again to guide the captured lower yarn to the splicing device 52.
- the splicing device 52 then splices the yarns together using a whirling air current.
- the winding device A comprises a drive source such as a motor 2, a pulley 5 to which a drive force is transmitted via a belt 4 from a pulley 3 fixedly installed on a drive shaft 2a of the motor 2, and a friction drum 6 (hereafter referred to as a "drum 6") that is in contact with the circumferential surface of the package P and that has the pulley 5 fixedly installed on a rotating shaft 6a.
- a drive source such as a motor 2
- a pulley 5 to which a drive force is transmitted via a belt 4 from a pulley 3 fixedly installed on a drive shaft 2a of the motor 2
- a friction drum 6 hereafter referred to as a "drum 6"
- Guide grooves 7, 7 for preventing from yarn stitching are formed near the respective lateral ends of the surface of the drum 6 and in part of the circumference of the drum 6.
- the drive force of the motor 2 is transmitted to the drum 6 via the pulley 3, the belt 4, and the pulley 5, and the drum 6 applies a rotational drive force to the package P to wind the yarn S using a tapered take-up tube Q as a core package.
- a mechanism for transmitting the drive force of the motor 2 to the traverse device T is described below.
- the traverse device T comprises a speed change mechanism section 10 according to the present invention and a traverse mechanism section 20 connected to the speed change mechanism section 10, and the rotational drive force of the motor 2 is st first input to the speed change mechanism section 10. That is, the force Is transmitted to an input gear 13 of the speed change mechanism section 10 via a gear a coupled to a rotating shaft 6a of the drum 6, a gear b meshing with the gear a (in this example, the gears a and b are bevel gears), and a gear c coaxially coupled to the gear b.
- a speed change mechanism By rotationally driving the input gear 13, a speed change mechanism, which is described below, rotates an output gear 15 at a predetermined speed change cycle, and this speed-varying rotational drive force is transmitted to the traverse mechanism section 20 via a gear d meshing with the output gear 15 and gears d1, d2.
- the traverse mechanism section 20 circumferentially move traverse belts 21, 22 extended vertically in parallel and each comprising a traverse guide 40 in which the yarn S is engagingly in opposite direction in each other, and is composed of not only the traverse belts 21, 22 but also timing belts 24, 25, pulleys 27 to 34, and gears e and f.
- the upper traverse belt 21 is extended between the pulleys 30 and 31, while the lower traverse belt 22 is extended between the pulleys 29 and 32.
- An input gear d3 of the traverse mechanism section 20 that meshes with the output gear d2 of the speed change mechanism section 10 has a pulley 17 fixedly and coaxially installed thereon, and a timing belt 24 extended between the pulleys 17 and 27 and 28.
- a timing belt 25 is extended between the pulleys 33 and 34.
- the pulley 27 and gear e that are coaxially arranged are configured so as to rotate integrally, and of the coaxially arrange pulleys 28, 29, and 30, the pulleys 28 and 30 rotate integrally, while the pulley 29 rotates freely relative to these pulleys 28 and 30.
- the pulleys 31, 32, and 33 rotate integrally, while the pulley 31 rotates freely relative to these pulleys 32 and 33.
- the coaxially arranged pulleys 28, 29, 30 are removably assemble using a boss 41, while the coaxially arranged pulleys 31, 32, 33 are removably assemble using a boss 42.
- the pulley 34 and gear f that are coaxially arranged are configured so as to rotate integrally, and the gears e and f are configured to mesh with each other and to be interlocked with each other.
- Figure 3 shows a schematic configuration of the traverse mechanism section 20 as seen in a top view, but includes tension pulleys 36 to 39, which are not shown in Figure 2.
- the tension pulley 36 adjusts the tension of the timing belt 24 between the pulleys 17 and 27 and 28, while the tension pulley 37 adjusts the tension of the timing belt 25 between the pulleys 33 and 34.
- the tension pulley 38 adjusts the tension of the upper traverse belt 21, while the tension pulley 39 adjusts the tension of the lower traverse belt 22.
- a rotational drive force output from the output gear d2 of the speed change mechanism section 10 is transmitted to the pulley 17 via the input gear d3. This force drives the timing belt 24 extended between the pulleys 17 and 27 and 28.
- the pulley 28 rotates the coaxially coupled pulley 30 to drive the traverse belt 21 extended between the pulleys 30 and 31, in the direction of arrow F1 (see Figure 3).
- the gear e coaxially coupled to the pulley 27 is rotated to rotate the gear f meshing with the gear e, in the reverse direction.
- the coaxially coupled pulley 34 is rotated to rotate the pulley 33 through the timing belt 25.
- the coaxially and integrally pulley 32 is rotated to drive the traverse belt 22 extended between the pulleys 29 and 32, in a direction (in Figure 3, the direction of arrow F2) reverse to that of the traverse belt 21.
- Such a mechanism enables the upper and lower traverse belts 21, 22 to circumferentially move in opposite directions to exchange the yarn S between the upper and lower traverse guides 40, 40 provided on the respective traverse belts 21, 22 in order to reciprocate the yarn S within a predetermined range corresponding to the winding width of the package P.
- the speed change mechanism section 10 is configured to prevent the traverse mechanism section 20 from operating reversibly during knotting. This configuration is explained below.
- FIG. 4 is referenced.
- the output gear 15 is adapted to be urged by a spring 16 to mesh with a rotating plate 14.
- a guide member 15d protrudes radially outward from the lower end of a boss section 15b of the output gear 15, as shown in Figures 4 and 7.
- a clutch arm 71 is supported at a fulcrum 71a so as to rotate freely, a plate 72 is installed on one side of the clutch arm 71, and the tip of the plate 72 is placed near and above the guide member 15d.
- An abutting section 71b is formed at the other end of the clutch arm 71 and abuts on a cam portion 70b of a rotating member 70.
- the rotating member 70 is interlocked with a control section (not shown in the drawings) of the automatic winder apparatus, and is rotationally moved around a fulcrum 70a in the direction of arrow F3 during knotting. Then, the abutting section 71b is removed from the cam portion 70b to rotationally move the clutch arm 71 in the direction of arrow F4 in Figure 7. Correspondingly, the plate 72 is rotationally moved to press the guide member 15d in the downward direction of Figures 4 and 7. The output gear 15 is moved downward against the urging force of the spring 16 to move the output gear 16 downward, thereby releasing balls 15a, 15a, ... from clutch holes 14b, 14b, ... to block power to the traverse mechanism section 20.
- the drum 6 is reversibly rotated to capture the upper yarn, and the clutch arm 71 is operated to release the output gear 15 from the rotating plate 14 in order to block power transmission to the traverse mechanical section 20, thereby preventing the traverse device T from operating reversibly.
- This configuration prevents the exchange of the yarn S between the traverse guides 40, 40 resulting from the reverse rotation operation, thereby solving problems such as yarn delivery errors to improve the operability of the winder apparatus.
- the input gear 13 meshes with the gear c installed coaxially with the gear b, and a pin 13a is installed using bolts or the like in the input gear 13.
- the rotating plate (also functioning as a clutch plate) 14 is disposed near and below the input gear 13, and the pin 13a of the input gear 13 penetrates through a long hole 14a in the rotating plate 14.
- the rotating plate 14 has a plurality of (in this embodiment, three) clutch holes 14b, 14b, ... machined therein.
- the output gear 15 is axially slidably supported on the rotating shaft 12 shared by the rotating plate 14, and the plurality of (in this embodiment, three) balls 15a, 15a, ... are buried in the gear 15, as shown in Figure 6.
- the output gear 15 has the boss section 15b protruding in the direction of the rotating shaft 12 and opposite to the rotating shaft 14, a circumferential spring receiving hole 15c is provided in the lower part of the boss section 15 as shown in Figure 4, and the spring 16 is buried in the spring receiving hole 15c.
- the other end of the spring 16 is supported on and fixed to a case side of the speed change mechanism section 10 so that the elastic force of the spring 16 urges the output gear 15 toward the rotating plate 14.
- the balls 15a, 15a, ... are arranged on the output gear 15 at an un-equal interval.
- the angle between the adjacent balls 15a, 15a is 130, 100, and 130 degrees.
- the clutch holes 14b, 14b, ... of the rotating plate (that is also a clutch plate) 14 are also arranged on the rotating plate 14 at the intervals of 130, 100, and 130 degrees. That is, by using such an arrangement for the balls 15a and the clutch holes 14b, the rotating plate 14 and the output gear 15 can be meshed with each other for integral rotations at only one position and cannot be connected with a free phase.
- the arrangement of the balls 15a, 15a, ... and the clutch holes 14b, 14b, ... is not limited to the above embodiment as long as the connection can be made with only one phase.
- the package P comprises a conical or conical trapezoid winding package Instead of a cylindrical cheese winding package
- the traverse speed must be varied between a small diameter section and a large diameter section.
- the embodiment shown in Figure 4 corresponds to a cone winding package. This configuration is described below.
- the input gear 13 and the rotating shaft 14 are interlocked and coupled with each other via the pin 13a, but if the input shaft 11 that is the axis of the input gear 13 and the rotating shaft 12 that is the axis of the rotating shaft 14 are placed on the same axis, both gears 13, 14 are moved at the sane rotation speed.
- the pin 13a is moved within the long hole 14a in the rotating plate 14 while the input gear 13 rotates once. That is, the distance between the pin 13a and the rotating shaft 12 of the rotating plate 14 varies over time. This means that while the pin 13a is rotated at a constant circumferential speed, the angular speed of the rotating plate 14 varies.
- the eccentric distance between the input gear 13 and the rotating plate 14 may be used to adjust the speed change ratio so that the traverse speed is highest on the smaller diameter side of the cone whereas it is lowest on the larger diameter side.
- Figure 8 shows the speed change mechanism section 10 in a cheese winding device.
- the traverse speed of the traverse device T may be constant, eliminating the needs for the rotating plate 14.
- a clutch hole 13a is disposed in the input gear 13 to constitute a ball clutch device between the input gear 13 and the output gear 15.
- the speed change mechanism section 10 in Figure 4 can be used for cheese winding packages by arranging the input shaft 11 and the rotating shat 12 on the same axis without eccentricity.
- the adjustment of the eccentric distance is one important element for synchronizing the operation of the traverse device T with the operation of the winding device A.
- the adjustment of synchronism between the traverse device T and the drum 6 of the winding device A is described.
- the guide grooves 7, 7 for preventing from yarn stitching are formed near the respective lateral ends of the surface of the drum 6 and in part of the circumference of the drum 6. The operation for guiding the yarn through the guide grooves 7, 7 must be synchronized with the operation of the traverse device T.
- the traverse device may be, for example, of a rotatable blades type, which provides similar effects in the configuration comprising the above speed change mechanism section and the clutch mechanism.
- the traverse device Due to the above configuration, the traverse device according to the present invention has the following effects: In the automatic winder, the clutch device is interposed between the drive source and the traverse mechanism section, and when a yarn is knotted, the clutch device is disconnected to block power transmission to the traverse mechanism section. Thus, when a defect is found in the yarn and If the yarn is cut and knotted, the delivery of the yarn resulting from the reverse rotation operation of the traverse device is prevented to solve problems such as yarn delivery errors, thereby improving the operability of the winder apparatus.
- the clutch device is interposed between the drive source and the traverse mechanism section, the clutch device can be connected only with a set phase, and the rotational movement of the drum of the winding device synchronizes with the reciprocating movement of the traverse mechanism section.
- This configuration enables synchronism between the state where the yarn, which is reciprocated in the traverse device, is located at the laterally opposite ends and the state where the yarn is guided to the yarn stitching preventing guide grooves provided in the drum of the winding device. Even if driving is transmitted without the synchronism, no drive force is transmitted to the traverse device, and the traverse device cannot be driven until these states synchronize with each other, thereby enabling a smooth and stable winding process.
- the clutch device comprises the ball clutch comprising the output gear having the plurality of gears buried therein and the clutch plate having the plurality of clutch holes, and the output gear and the clutch plate mesh with each other only with a set phase.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Quality & Reliability (AREA)
- Spinning Or Twisting Of Yarns (AREA)
- Winding Filamentary Materials (AREA)
Abstract
Description
- The present invention relates to a belt traverse device used for an automatic winder apparatus for winding a yarn, and in particular, to a mechanism for preventing-a traverse device from being reversibly rotated due to a drum reverse rotation operation during knotting.
- An automatic winder apparatus for winding a yarn to form a package Is generally composed of a yarn winding device and a yarn traverse device and uses a drive force from a drive source such as a motor to form a package by using the winding device to rewind a yarn around a take-up tube while using the traverse device to laterally reciprocate (traverse) the yarn.
- During knotting, a drum of the winding device must be reversibly rotated in order to capture the yarn wound around the package. The drum and the belt traverse device, however, are Interlocked with each other via a gear or belt, so the belt traverse device is reversibly rotated in synchronism with the drum.
- This conventional technique has the following problem. While the belt traverse device is being reversibly rotated and when an upper yarn suction member (a suction pipe) captures an upper yarn, draws it out from the package, and threads a splicing device with the yarn, the drawn-out upper yarn may be caught in the traverse device. The belt traverse device has traverse guides each attached to one position on the circumference of each of two belts that rotate in opposite directions so that one of the guides can deliver a yarn to the other guide, thereby implementing the smooth and reliable reciprocating motion of the yarn. If this belt traverse device is reversibly rotated, the roles of the traverse guide delivering the yarn at a traverse end and of the traverse guide receiving it are reversed to prevent the functioning of a yarn removal guide for forward rotations that supplements the exchange of the yarn between the traverse guides. As a result, the yarn may be caught at the traverse end. In order to prevent the yarn from being caught, a lateral pair of traverse guide having different shapes and an additional yarn removal guide operative during reverse rotations have been proposed but have not completely solved the catching problem partly due to the small tension of the yarn during rewinding for splicing compared to normal winding.
- The present invention attempts to solve this problem, and a means for achieving this object is described below. In an automatic winder, a clutch device is interposed between a drive source and a traverse mechanism section, and when knotting operation is carried out, the clutch device is disconnected to block power transmission to the traverse mechanism section.
- In addition, in an automatic winder, a clutch device is interposed between a drive source and a traverse mechanism section, the clutch device can be connected only with a set phase, and the rotational movement of a drum of a winding device synchronizes with the reciprocating movement of the traverse mechanism section.
- In addition, the clutch device comprises a ball clutch comprising an output gear having a plurality of balls buried therein and a clutch plate having a plurality of clutch holes, and the output gear and the clutch plate mesh with each other only with a set phase.
-
- Figure 1 is an overall perspective view of an automatic winding unit.
- Figure 2 is a typical view of a winding device, a speed change mechanism section, and a traverse mechanism section.
- Figure 3 is a typical top view of the traverse mechanism section.
- Figure 4 is a sectional view of the speed change mechanism section.
- Figure 5 is a top view of a rotating plate (a clutch plate).
- Figure 6 is a top view of an output gear.
- Figure 7 is a side view showing a clutch mechanism.
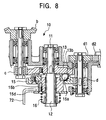
- Figure 8 is a sectional view of a clutch mechanism section for corn package winding.
-
- Next, the embodiments of the present invention are described with reference to the accompanying drawings.
- First, the overall configuration of an automatic winder according to the present invention will be described with reference to Figure 1.
- Figure 1 shows the entire configuration of an
automatic winder 50 incorporating a belt traverse device T according to the present invention. The illustratedautomatic winder 50 unwinds a yarn S from a supplyingpackage 60, passes it along aguide 57, and rewinds it around a tapered take-up tube Q that is rotationally driven by adrum 6. In this case, the traverse device T traverses the yarn S while increasing or reducing the speed at a constant cycle optimum for formation of a corn winding package. During the winding operation, ayarn defect detector 53 monitors the yarn S for a defect and atenser 56 adjusts the tension of the yarn S. - When the
yarn defect detector 53 detects a defect or an abnormal portion in the yarn S, amotor 2 stops driving adrum 6, and a cutter provided in theyarn defect detector 53 cuts the yarn S. A supplying side section (a lower yarn) of the cut yarn S is sucked by a loweryarn suction pipe 55 that constantly carries out suction. On the other hand, the winding side portion (an upper yarn) of the cut yarn S is wound to the package by thedrum 6 that makes inertial rotations. Subsequently, thedrum 6 is reversibly rotated to feed out a small amount of the yarn S, and an upperyarn suction member 58 is swiveled upward to capture the upper yarn and is then swiveled downward again to guide the captured upper yarn to thesplicing device 52. On the other hand, the loweryarn suction member 54 is swiveled downward to capture the lower yarn sucked in the loweryarn suction pipe 55 and is then swiveled upward again to guide the captured lower yarn to thesplicing device 52. Thesplicing device 52 then splices the yarns together using a whirling air current. Once the splicing processing has been completed, the forward (winding direction) rotation of themotor 2 is started to resume the process for winding the yarn S. - Next, an embodiment in which the belt traverse device T according to the present invention (hereafter referred to as the "traverse device T") has been applied to a winding device A for winding the yarn S around a package P is explained with reference to Figures 2 and 3.
- In Figure 2, the winding device A comprises a drive source such as a
motor 2, apulley 5 to which a drive force is transmitted via abelt 4 from apulley 3 fixedly installed on adrive shaft 2a of themotor 2, and a friction drum 6 (hereafter referred to as a "drum 6") that is in contact with the circumferential surface of the package P and that has thepulley 5 fixedly installed on a rotatingshaft 6a.Guide grooves drum 6 and in part of the circumference of thedrum 6. - The drive force of the
motor 2 is transmitted to thedrum 6 via thepulley 3, thebelt 4, and thepulley 5, and thedrum 6 applies a rotational drive force to the package P to wind the yarn S using a tapered take-up tube Q as a core package. - A mechanism for transmitting the drive force of the
motor 2 to the traverse device T is described below. - The traverse device T comprises a speed
change mechanism section 10 according to the present invention and atraverse mechanism section 20 connected to the speedchange mechanism section 10, and the rotational drive force of themotor 2 is st first input to the speedchange mechanism section 10. That is, the force Is transmitted to aninput gear 13 of the speedchange mechanism section 10 via a gear a coupled to a rotatingshaft 6a of thedrum 6, a gear b meshing with the gear a (in this example, the gears a and b are bevel gears), and a gear c coaxially coupled to the gear b. By rotationally driving theinput gear 13, a speed change mechanism, which is described below, rotates anoutput gear 15 at a predetermined speed change cycle, and this speed-varying rotational drive force is transmitted to thetraverse mechanism section 20 via a gear d meshing with theoutput gear 15 and gears d1, d2. - The
traverse mechanism section 20 circumferentially movetraverse belts traverse guide 40 in which the yarn S is engagingly in opposite direction in each other, and is composed of not only thetraverse belts timing belts pulleys 27 to 34, and gears e and f. - The
upper traverse belt 21 is extended between thepulleys 30 and 31, while thelower traverse belt 22 is extended between thepulleys traverse mechanism section 20 that meshes with the output gear d2 of the speedchange mechanism section 10 has apulley 17 fixedly and coaxially installed thereon, and atiming belt 24 extended between thepulleys timing belt 25 is extended between thepulleys 33 and 34. - The
pulley 27 and gear e that are coaxially arranged are configured so as to rotate integrally, and of the coaxiallyarrange pulleys pulleys pulley 29 rotates freely relative to thesepulleys arrange pulleys 31, 32, and 33, thepulleys 32 and 33 rotate integrally, while the pulley 31 rotates freely relative to thesepulleys 32 and 33. The coaxially arrangedpulleys boss 41, while the coaxially arrangedpulleys 31, 32, 33 are removably assemble using aboss 42. Furthermore, thepulley 34 and gear f that are coaxially arranged are configured so as to rotate integrally, and the gears e and f are configured to mesh with each other and to be interlocked with each other. - Figure 3 shows a schematic configuration of the
traverse mechanism section 20 as seen in a top view, but includestension pulleys 36 to 39, which are not shown in Figure 2. Thetension pulley 36 adjusts the tension of thetiming belt 24 between thepulleys tension pulley 37 adjusts the tension of thetiming belt 25 between thepulleys 33 and 34. Thetension pulley 38 adjusts the tension of theupper traverse belt 21, while thetension pulley 39 adjusts the tension of thelower traverse belt 22. - A rotational drive force output from the output gear d2 of the speed
change mechanism section 10 is transmitted to thepulley 17 via the input gear d3. This force drives thetiming belt 24 extended between thepulleys pulley 28 rotates the coaxially coupledpulley 30 to drive thetraverse belt 21 extended between thepulleys 30 and 31, in the direction of arrow F1 (see Figure 3). - On the other hand, when the
pulley 27 is rotationally driven, the gear e coaxially coupled to thepulley 27 is rotated to rotate the gear f meshing with the gear e, in the reverse direction. Then, the coaxially coupledpulley 34 is rotated to rotate the pulley 33 through thetiming belt 25. As a result, the coaxially and integrallypulley 32 is rotated to drive thetraverse belt 22 extended between thepulleys traverse belt 21. - Such a mechanism enables the upper and
lower traverse belts lower traverse guides respective traverse belts - Between the traverse device T and the winding device A, there is a problem associated with the reverse rotation of the winding device A during knotting. During the reverse rotation of the winding device A, an error conventionally occurs in exchanging the yarn between the traverse guides 40, 40 due to the reverse rotation of the
traverse mechanism section 20 interlocked and coupled with the winding device A via the speedchange mechanism section 10. Thus, the speedchange mechanism section 10 according to the present invention is configured to prevent thetraverse mechanism section 20 from operating reversibly during knotting. This configuration is explained below. - Figure 4 is referenced. As described below, the
output gear 15 is adapted to be urged by aspring 16 to mesh with arotating plate 14. Aguide member 15d protrudes radially outward from the lower end of aboss section 15b of theoutput gear 15, as shown in Figures 4 and 7. On the other hand, as shown in Figure 7, aclutch arm 71 is supported at afulcrum 71a so as to rotate freely, aplate 72 is installed on one side of theclutch arm 71, and the tip of theplate 72 is placed near and above theguide member 15d. Anabutting section 71b is formed at the other end of theclutch arm 71 and abuts on acam portion 70b of a rotatingmember 70. - The rotating
member 70 is interlocked with a control section (not shown in the drawings) of the automatic winder apparatus, and is rotationally moved around afulcrum 70a in the direction of arrow F3 during knotting. Then, the abuttingsection 71b is removed from thecam portion 70b to rotationally move theclutch arm 71 in the direction of arrow F4 in Figure 7. Correspondingly, theplate 72 is rotationally moved to press theguide member 15d in the downward direction of Figures 4 and 7. Theoutput gear 15 is moved downward against the urging force of thespring 16 to move theoutput gear 16 downward, thereby releasingballs clutch holes traverse mechanism section 20. - Due to this configuration, if the
yarn defect detector 53 detects a defect in the yarn S and cuts the yarn S for knotting, thedrum 6 is reversibly rotated to capture the upper yarn, and theclutch arm 71 is operated to release theoutput gear 15 from the rotatingplate 14 in order to block power transmission to the traversemechanical section 20, thereby preventing the traverse device T from operating reversibly. This configuration prevents the exchange of the yarn S between the traverse guides 40, 40 resulting from the reverse rotation operation, thereby solving problems such as yarn delivery errors to improve the operability of the winder apparatus. - When the rotating
member 70 is rotated once, the abuttingsection 71b of theclutch arm 71 is lifted on thecam portion 70b to rotationally move theclutch arm 71 to release the pressure of the output gear15 on theguide member 15d. Consequently, theoutput gear 15 again meshes with therotating plate 14 being urged by thespring 16, thereby allowing the traverse device T to start driving. In this case, since therotating plate 14 and theoutput gear 15 mesh with each other at only one position, as described below, the reciprocating movement of the traverse device T synchronizes with the positions of theguide grooves drum 6 to enable a stable winding process to be continued. - Next, a configuration of the
speed change mechanism 10 according to the present invention is described with reference to Figures 4 to 8. - In Figure 4, the
input gear 13 meshes with the gear c installed coaxially with the gear b, and apin 13a is installed using bolts or the like in theinput gear 13. The rotating plate (also functioning as a clutch plate) 14 is disposed near and below theinput gear 13, and thepin 13a of theinput gear 13 penetrates through along hole 14a in therotating plate 14. In addition, as shown in Figure 5, the rotatingplate 14 has a plurality of (in this embodiment, three)clutch holes - In addition, the
output gear 15 is axially slidably supported on therotating shaft 12 shared by the rotatingplate 14, and the plurality of (in this embodiment, three)balls gear 15, as shown in Figure 6. Furthermore, theoutput gear 15 has theboss section 15b protruding in the direction of therotating shaft 12 and opposite to therotating shaft 14, a circumferentialspring receiving hole 15c is provided in the lower part of theboss section 15 as shown in Figure 4, and thespring 16 is buried in thespring receiving hole 15c. The other end of thespring 16 is supported on and fixed to a case side of the speedchange mechanism section 10 so that the elastic force of thespring 16 urges theoutput gear 15 toward the rotatingplate 14. - The
balls output gear 15 at an un-equal interval. According to this embodiment, the angle between theadjacent balls clutch holes rotating plate 14 at the intervals of 130, 100, and 130 degrees. That is, by using such an arrangement for theballs 15a and theclutch holes 14b, the rotatingplate 14 and theoutput gear 15 can be meshed with each other for integral rotations at only one position and cannot be connected with a free phase. The arrangement of theballs clutch holes - In addition, if the package P comprises a conical or conical trapezoid winding package Instead of a cylindrical cheese winding package, the traverse speed must be varied between a small diameter section and a large diameter section. The embodiment shown in Figure 4 corresponds to a cone winding package. This configuration is described below. In Figure 4, the
input gear 13 and therotating shaft 14 are interlocked and coupled with each other via thepin 13a, but if theinput shaft 11 that is the axis of theinput gear 13 and therotating shaft 12 that is the axis of therotating shaft 14 are placed on the same axis, bothgears - If, however, the
input gear 13 and therotating plate 14 become eccentric (not eccentric thereto in the drawing), thepin 13a is moved within thelong hole 14a in therotating plate 14 while theinput gear 13 rotates once. That is, the distance between thepin 13a and therotating shaft 12 of therotating plate 14 varies over time. This means that while thepin 13a is rotated at a constant circumferential speed, the angular speed of therotating plate 14 varies. The eccentric distance between theinput gear 13 and therotating plate 14 may be used to adjust the speed change ratio so that the traverse speed is highest on the smaller diameter side of the cone whereas it is lowest on the larger diameter side. - Figure 8 shows the speed
change mechanism section 10 in a cheese winding device. In this case, the traverse speed of the traverse device T may be constant, eliminating the needs for therotating plate 14. Accordingly, in Figure 8, aclutch hole 13a is disposed in theinput gear 13 to constitute a ball clutch device between theinput gear 13 and theoutput gear 15. The speedchange mechanism section 10 in Figure 4, however, can be used for cheese winding packages by arranging theinput shaft 11 and the rotating shat 12 on the same axis without eccentricity. - The adjustment of the eccentric distance is one important element for synchronizing the operation of the traverse device T with the operation of the winding device A. Next, the adjustment of synchronism between the traverse device T and the
drum 6 of the winding device A is described. As described above, theguide grooves drum 6 and in part of the circumference of thedrum 6. The operation for guiding the yarn through theguide grooves - It is meaningless if the
guide grooves drum 6 are not located on the front surface side, that is, on the yarn passage when the traverse guides 40, 40 transferred by thetraverse belts rotating plate 14 andoutput gear 15 of the speedchange mechanism section 10 is effective. Since theballs output gear 15 mesh with theclutch holes rotating plate 14 at only one circumferential position, adjustments may be made such that therotating plate 14 and theoutput gear 15 mesh with each other when theguide grooves guide grooves rotating plate 14 and the output gear meshes with each other, that is, the traverse device T is not driven until these components synchronize with each other. - Although this embodiment controls the connection and disconnection of the clutch device using the cam portion and
clutch arm 71 of the rotatingmember 70, an air cylinder or a solenoid may of course be used for electric control and the present invention is not limited to this embodiment. - In addition, although this embodiment has shown a belt type device as an example of the traverse device T, the traverse device may be, for example, of a rotatable blades type, which provides similar effects in the configuration comprising the above speed change mechanism section and the clutch mechanism.
- Due to the above configuration, the traverse device according to the present invention has the following effects: In the automatic winder, the clutch device is interposed between the drive source and the traverse mechanism section, and when a yarn is knotted, the clutch device is disconnected to block power transmission to the traverse mechanism section. Thus, when a defect is found in the yarn and If the yarn is cut and knotted, the delivery of the yarn resulting from the reverse rotation operation of the traverse device is prevented to solve problems such as yarn delivery errors, thereby improving the operability of the winder apparatus.
- In addition, in the automatic winder, the clutch device is interposed between the drive source and the traverse mechanism section, the clutch device can be connected only with a set phase, and the rotational movement of the drum of the winding device synchronizes with the reciprocating movement of the traverse mechanism section. This configuration enables synchronism between the state where the yarn, which is reciprocated in the traverse device, is located at the laterally opposite ends and the state where the yarn is guided to the yarn stitching preventing guide grooves provided in the drum of the winding device. Even if driving is transmitted without the synchronism, no drive force is transmitted to the traverse device, and the traverse device cannot be driven until these states synchronize with each other, thereby enabling a smooth and stable winding process.
- In addition the clutch device comprises the ball clutch comprising the output gear having the plurality of gears buried therein and the clutch plate having the plurality of clutch holes, and the output gear and the clutch plate mesh with each other only with a set phase. As a result, a single configuration can be used to synchronize the winding device with the traverse device, thereby enabling an inexpensive and stable winding process.
Claims (4)
- A traverse device for an automatic winder characterized in that a clutch device is interposed between a drive source and a traverse mechanism section and in that when knotting operation is carried out, the clutch device is disconnected to block power transmission to the traverse mechanism section.
- A traverse device for an automatic winder characterized In that a clutch device is interposed between a drive source and a traverse mechanism section, in that the clutch device can be connected only with a set phase, and in that the rotational movement of a drum of a winding device synchronizes with the reciprocating movement of the traverse mechanism section.
- A traverse device for an automatic winder as in Claim 2 characterized in that said clutch device comprises a ball clutch comprising an output gear having a plurality of balls buried therein and a clutch plate having a plurality of clutch holes and in that the output gear and the clutch plate mesh with each other only with a set phase.
- A traverse device for an automatic winder as in any one of Claims 1 to 3 characterized in that said traverse device is a belt traverse device.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP203699 | 1999-01-07 | ||
| JP11002036A JP2000198621A (en) | 1999-01-07 | 1999-01-07 | Traversing device of automatic winder |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1018479A2 true EP1018479A2 (en) | 2000-07-12 |
| EP1018479A3 EP1018479A3 (en) | 2001-01-31 |
Family
ID=11518114
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP99124772A Withdrawn EP1018479A3 (en) | 1999-01-07 | 1999-12-13 | Traverse device for automatic winder |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP1018479A3 (en) |
| JP (1) | JP2000198621A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101898705A (en) * | 2010-05-18 | 2010-12-01 | 中国电子科技集团公司第四十研究所 | Shift mechanism of ribbon rolling machine |
| CN112429589A (en) * | 2020-10-14 | 2021-03-02 | 孙翠平 | Quick coiling mechanism of fire hose |
| CN112499380A (en) * | 2020-12-16 | 2021-03-16 | 西格码电气股份有限公司 | Automatic wire take-up device for electric power engineering and use method thereof |
| US11117737B2 (en) | 2012-11-12 | 2021-09-14 | Southwire Company, Llc | Wire and cable package |
| CN113882043A (en) * | 2021-11-04 | 2022-01-04 | 常州市鹤鹏机械制造有限公司 | Lifting reduction gearbox for twisting machine |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3310246A (en) * | 1963-12-16 | 1967-03-21 | Mcclean Anderson Inc | Strand winding machine |
| FR1519822A (en) * | 1967-02-14 | 1968-04-05 | Mecaniques Verdol Soc D | Refinements to double call cylinder devices for the textile industry |
| US3397850A (en) * | 1966-10-31 | 1968-08-20 | Engineering Technology Inc | Filament winding apparatus |
| EP0510829A1 (en) * | 1991-04-25 | 1992-10-28 | Rieter-Scragg Limited | Winding apparatus |
| EP0834462A2 (en) * | 1996-10-01 | 1998-04-08 | Murata Kikai Kabushiki Kaisha | Winding device |
-
1999
- 1999-01-07 JP JP11002036A patent/JP2000198621A/en active Pending
- 1999-12-13 EP EP99124772A patent/EP1018479A3/en not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3310246A (en) * | 1963-12-16 | 1967-03-21 | Mcclean Anderson Inc | Strand winding machine |
| US3397850A (en) * | 1966-10-31 | 1968-08-20 | Engineering Technology Inc | Filament winding apparatus |
| FR1519822A (en) * | 1967-02-14 | 1968-04-05 | Mecaniques Verdol Soc D | Refinements to double call cylinder devices for the textile industry |
| EP0510829A1 (en) * | 1991-04-25 | 1992-10-28 | Rieter-Scragg Limited | Winding apparatus |
| EP0834462A2 (en) * | 1996-10-01 | 1998-04-08 | Murata Kikai Kabushiki Kaisha | Winding device |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101898705A (en) * | 2010-05-18 | 2010-12-01 | 中国电子科技集团公司第四十研究所 | Shift mechanism of ribbon rolling machine |
| US11117737B2 (en) | 2012-11-12 | 2021-09-14 | Southwire Company, Llc | Wire and cable package |
| US11858719B2 (en) | 2012-11-12 | 2024-01-02 | Southwire Company, Llc | Wire and cable package |
| CN112429589A (en) * | 2020-10-14 | 2021-03-02 | 孙翠平 | Quick coiling mechanism of fire hose |
| CN112499380A (en) * | 2020-12-16 | 2021-03-16 | 西格码电气股份有限公司 | Automatic wire take-up device for electric power engineering and use method thereof |
| CN112499380B (en) * | 2020-12-16 | 2023-04-07 | 西格码电气股份有限公司 | Automatic take-up device for electric power engineering |
| CN113882043A (en) * | 2021-11-04 | 2022-01-04 | 常州市鹤鹏机械制造有限公司 | Lifting reduction gearbox for twisting machine |
| CN113882043B (en) * | 2021-11-04 | 2022-10-21 | 常州市鹤鹏机械制造有限公司 | Lifting reduction gearbox for twisting machine |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2000198621A (en) | 2000-07-18 |
| EP1018479A3 (en) | 2001-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0873962B1 (en) | Optical fiber dual spindle winder with automatic threading and winding | |
| EP1717182A2 (en) | Yarn slack eliminating device in textile machine | |
| US3749327A (en) | Thread packaging device with intermediate thread storage means | |
| JP4155642B2 (en) | Apparatus and method for guiding and cutting continuously running yarns | |
| CN102275774B (en) | Winding unit and yarn winding machine equipped with the same | |
| EP1721854B1 (en) | Doffing device for an automatic winder | |
| EP1018479A2 (en) | Traverse device for automatic winder | |
| EP1457446B9 (en) | Tension control and slack eliminating device for a yarn winder | |
| JP2007112625A (en) | Winder for textile machine | |
| JP3749768B2 (en) | Textile machinery for manufacturing Ayanaki bobbins | |
| EP2749515A2 (en) | Yarn pooling device and spinning unit | |
| TWI548584B (en) | Winding machine and method for operating the same | |
| JP2003049333A (en) | Autodoffer | |
| EP0834462B1 (en) | Winding device | |
| EP1561717B1 (en) | Spinning machine comprising a device for winding a thread reserve on an empty bobbin | |
| JPH05162924A (en) | Thread wind-up apparatus | |
| JPH10250938A (en) | Belt traverse device | |
| JP3681819B2 (en) | Bobbin winder with flange | |
| JPH08173671A (en) | Bobbin thread winding device | |
| EP3746387B1 (en) | A method to position spindle precisely in turret type automatic winder | |
| JP2782554B2 (en) | Turret type winding device | |
| JP3675848B2 (en) | Turret type winder thread switching device | |
| JPH07246297A (en) | Lower thread winding device for sewing machine | |
| JPH10338418A (en) | Belt traverse device | |
| JP3888320B2 (en) | Spinning machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): CH DE LI |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 20010423 |
|
| AKX | Designation fees paid |
Free format text: CH DE LI |
|
| 17Q | First examination report despatched |
Effective date: 20020930 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN WITHDRAWN |
|
| 18W | Application withdrawn |
Withdrawal date: 20021118 |