EP0573388A1 - Dispositif générateur de signaux caractéristiques du déplacement d'un moyen de fermeture - Google Patents
Dispositif générateur de signaux caractéristiques du déplacement d'un moyen de fermeture Download PDFInfo
- Publication number
- EP0573388A1 EP0573388A1 EP93810369A EP93810369A EP0573388A1 EP 0573388 A1 EP0573388 A1 EP 0573388A1 EP 93810369 A EP93810369 A EP 93810369A EP 93810369 A EP93810369 A EP 93810369A EP 0573388 A1 EP0573388 A1 EP 0573388A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- signal
- closure
- wiper
- movement
- subroutine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/80—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling
- E06B9/82—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling automatic
- E06B9/86—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling automatic against unauthorised opening
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/80—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling
- E06B9/82—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling automatic
- E06B9/88—Safety measures against dropping or unauthorised opening; Braking or immobilising devices; Devices for limiting unrolling automatic for limiting unrolling
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/68—Operating devices or mechanisms, e.g. with electric drive
- E06B2009/6809—Control
- E06B2009/6818—Control using sensors
- E06B2009/6836—Control using sensors sensing obstacle
-
- E—FIXED CONSTRUCTIONS
- E06—DOORS, WINDOWS, SHUTTERS, OR ROLLER BLINDS IN GENERAL; LADDERS
- E06B—FIXED OR MOVABLE CLOSURES FOR OPENINGS IN BUILDINGS, VEHICLES, FENCES OR LIKE ENCLOSURES IN GENERAL, e.g. DOORS, WINDOWS, BLINDS, GATES
- E06B9/00—Screening or protective devices for wall or similar openings, with or without operating or securing mechanisms; Closures of similar construction
- E06B9/56—Operating, guiding or securing devices or arrangements for roll-type closures; Spring drums; Tape drums; Counterweighting arrangements therefor
- E06B9/68—Operating devices or mechanisms, e.g. with electric drive
- E06B2009/6809—Control
- E06B2009/6818—Control using sensors
- E06B2009/6845—Control using sensors sensing position
Definitions
- the present invention relates to a device generating signals characteristic of the movement of a closure means, such as a shutter, rollable or not, blind or door.
- Such generators are used for commanding and controlling the movement of closing means, in particular for detecting obstacles, detecting intrusion attempts and controlling the stopping of the closing means at the end of the travel.
- a signal generator device associated with a motorized roller shutter is described in patent FR 2 657 646.
- This generator comprises a pulley mounted on the winding axis of the roller shutter and on which is wound a flexible element whose other end is connected to the end of the roller shutter, so that the unwinding of the shutter drives the pulley, the axis of which is mechanically connected to a signal generator, for example a synchronous motor.
- the generator arranged laterally on the winding axis, therefore requires a space which is not always available in a window frame or a door frame.
- the flexible element connecting the generator pulley to the final bar of the roller shutter is unattractive and this flexible element may be accidentally hung or damaged due to its unprotected passage, such an incident being liable to seriously disturb the operation of the roller shutter.
- the present invention aims to overcome these drawbacks.
- the signal generator device is characterized in that it comprises a wiper secured to the closure means, a fixed rigid element capable of being driven in vibration by the wiper and extending over at least the length of the stroke of the closure means so that the wiper rubs on the rigid element during the displacement of the closure means, and a vibration sensor rigidly mounted on the rigid element and delivering a signal characteristic of these vibrations.
- the closing means generally comprise guide means in the form of a slide, so that the wiper can move in the slide while being hidden and perfectly protected.
- the rigid vibrating element can be constituted by the slide itself or by the guide slide of a tilting or side-moving door or by an element attached to this slide or this slide.
- the invention also relates to a motorized closure equipped with at least one signal generator device according to the invention, this closure being characterized in that it further comprises electronic means for processing the signal emitted by the vibration sensor and means for controlling the motor or motors for driving the closing means as a function of the orders received from the signal processing means.
- the control means can ensure both the closure stop, when the latter encounters an obstacle, as well as the triggering of an alarm in the event of an attempt intrusion, as well as the closure stop at the end of the race and / or in intermediate positions, using a toothed or grooved vibrating element allowing to obtain a vibration having periodic variations corresponding to its teeth or grooves and therefore characteristics of the closing position.
- Figure 1 is a sectional view of a roller shutter equipped with a generator according to the invention.
- Figure 2 shows a detail of Figure 1.
- FIG. 3 represents an alternative embodiment of FIG. 2.
- Figure 4 shows the detail, in vertical section along IV-IV of Figure 5, of an exemplary embodiment of the vibrating element and the wiper.
- FIG. 5 is a sectional view along V-V of FIG. 4.
- FIGS 6 and 7 show two other embodiments of the vibrating element.
- FIG. 8 represents the diagram of the signal processing means and of the means for controlling the rolling stock shown in FIG. 1.
- FIG. 9 represents a first embodiment of the reference signal generator.
- FIG. 10 represents a simplified embodiment of the reference signal generator.
- FIG. 11 represents the main program of the control means.
- FIG. 12 shows a variant of a sub-program for controlling the shutter to stop.
- FIG. 13 represents a variant of the subroutine for triggering an alarm in the event of an intrusion attempt.
- FIG. 14 represents the decoding circuit of an alternative embodiment with two sensors.
- FIG. 15 represents the diagram of a wired execution of the control device.
- FIG. 16 represents a variant of the main program for the case of transmission of signals with periodic variations.
- Figure 17 shows the variation counting routine.
- Figure 18 shows the alarm routine.
- FIG. 19 represents a modification of the program of FIG. 16 making it possible to obtain intermediate stop positions.
- FIG. 20 represents the counting subroutine of the variant represented in FIG. 19.
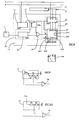
- Figure 1 shows, in vertical section, a window frame 1 in which is mounted a rolling shutter 2 guided in a pair of runners 3 and winding on a winding axis 4 mounted in a housing 5 and driven by a motor not shown.
- the motor has two windings ensuring the rotation of the winding shaft 4 in two opposite directions.
- the roller shutter 2 is shown here in the fully unrolled position. Its last blade is provided with an end of travel stop 6 constituted by a lug intended to come into abutment against the top of the embrasure 1.
- the slide 3 is extended by a part 3a in the housing 5 and at the end of this extension 3a is rigidly fixed a vibration sensor 7.
- On the last blade 8 of the roller shutter is further fixed a wiper, for example a steel blade whose free end rubs on one of the inner faces of the slide whose the surface has been roughened or grainy by sandblasting.
- the vibration sensor can be of the accelerometer or piezoelectric or ferroelectric shock detector type, of micro-machined silicon with integrated processing electronics, for example a sensor sold by MURATA under the trade name PKS-4A.
- the signals emitted by the sensor 7 are processed by a control device 13 controlling the motor of the winding axis 4.
- the installation is completed by a remote control 14, connected galvanically or not to the control electronics 13 and comprising keys for controlling the raising, lowering and stopping of the shutter.
- the wiper can rub on an auxiliary vibrating element.
- the vibrating element consists of a steel blade 9 fixed on one of the inner faces 10 of the slide 3 and on which a wiper 11 rubs
- the opposite face 12 of the slide is smooth and the last blade 8 is provided with a shoe 15 sliding on the face 12.
- the stop 6 abuts against the embrasure when the shutter arrives at high position, the vibrations cease and the detector 7 detects the absence of vibration and controls the stopping of the engine.
- FIG 3 shows an alternative embodiment of Figure 2, in which the stop 6 is removed and the vibrating element 9 is shorter.
- the upper position of the shutter is reached when the wiper leaves the vibrating element 9. This execution allows the shutter to stop smoothly, without sudden pulling. She is particularly advantageous in the case of fragile roller shutters.
- FIGS 4 and 5 show, in more detail, an embodiment and mounting of the wiper 11. It is fixed by riveting, welding or clipping at a point 17 inside the last tubular blade 8 of the shutter rolling and passes through this blade through a slot 18.
- the wiper 11 has a curved end 11a in contact with the vibrating element formed here by the slide 3 itself.
- the vibrating element consists of a rough blade 19 fixed to the slide by means of an adhesive 20.
- the rough blade 19 is replaced by a blade 21 having a serrated profile 22.
- This profile could also be serrated.
- Such a profile makes it possible to obtain a periodic variation in the amplitude of the vibrations, each variation corresponding to a tooth or a niche.
- the counting of these variations makes it possible to determine the position of the wiper, that is to say the position of the roller shutter.
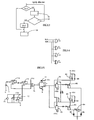
- the control device 13 is shown diagrammatically in FIG. 8. It consists of processing electronics 23 and control electronics 24 for controlling the motor 25.
- the processing electronics include an amplifier-demodulator 26, a reference generator 27 and a comparator 28.
- the function of the amplifier-demodulator 26 is to receive the signal delivered by the sensor, to amplify it, possibly to rectify it, to smooth it out and to deliver to the comparator 28 to which is applied, on the other hand, a reference value delivered by the reference generator 27.
- the reference generator 27 can be constituted by a simple voltage divider R1 / R2, as shown in FIG. 10, delivering a fixed voltage value.
- the reference generator 27 can also be designed to deliver a reference value derived from the value of the signal picked up, as shown in FIG. 9. In this case, it consists of a voltage divider R1 / R2 in parallel to a capacitor C, all in series with a resistor R3 to which the sensed signal is applied. This allows to take into account the variation of the signal received due to the aging of the sensor or to any other influence and to automatically adapt to the signal level corresponding to the use.
- the function of the comparator 28 is to compare the value of the signal received from the amplifier-demodulator 26 with that received from the reference generator 27 and to deliver a logic signal (0 or 1) according to the relative level of the compared values. In the particular case, the comparator 28 delivers the signal 1 when the value of the sensed signal is greater than the reference value.
- the microprocessor 29 further comprises a fourth DPI input (intermediate position request), a position counter 291 and a reaction time counter 292, a memory 294 for storing the alarm reaction time or the minimum position variation for triggering an alarm and a memory 295 for storing the value of the position counter.
- a fourth DPI input intermediate position request
- a position counter 291 for storing the alarm reaction time or the minimum position variation for triggering an alarm
- a memory 295 for storing the value of the position counter.
- the control device 13 further comprises a stabilized supply 32 for supplying different components.
- the execution mode corresponding to the program represented in FIG. 11 includes two end of travel or obstacle indicators, up and down FCM and FCD positioned high by the stop subroutines, respectively in the direction of ascent (M) and descent (D) and reset to zero when moving in the opposite direction.
- This embodiment therefore makes it possible to stop at the end of the race at a high, low stopping point and in the event of obstacles, by detection of the interruption of the vibrations, as well as the detection of an intrusion attempt by appearance. vibrations.
- the alarm subroutine could be deleted.
- control electronics 24 is also provided for testing that the change of the logic order on the output SL of the comparator remains a certain time before suspending the transmission of direction 1 movement orders. / sense 2 or before transmitting an alarm command.
- the Up and Down stop subroutines of figure 11 are replaced by the subroutine according to figure 12 and the microprocessor includes a memory 293 storing the stop reaction time value and a stop reaction time counter 292.
- the instruction 33 increments the stop reaction time counter 292.
- the following instruction is a test instruction 34 which compares the counted value with the stored value. If the counted value is greater than the memorized value, then only the SM and SD outputs are set to zero by the following instruction and the program loops. At the same time, instruction 35 resets counter 292 to 0.
- the program loops without issuing a stop command.
- the alarm subroutine of FIG. 11 is also completed as shown in FIG. 13, in a similar manner to the shutdown subroutine of FIG. 12.
- the microprocessor includes a memory 294 storing the value of reaction time d 'alarm.
- instruction 36 increments counter 292 and instruction 37 compares the counted value with the value stored in memory 294. If the counted value is greater than the stored value, the SA output goes to 1 and a alarm is triggered. Simultaneously, instruction 38 resets the counter to 292 at 0.
- This embodiment makes it possible to avoid stopping or triggering alarms resulting from false faults, such as those caused by shocks, hard points in the slide, fugitive obstacles.
- the safety-stop device which has just been described leads to stopping the descent in the non-stacked blade position (so-called "openwork” position if the wiper has been arranged on the lower blade of the closure (blade 8).
- a second wiper should be placed on the blade penetrating the slide 3, in contact with the vibration element, just before the low blade arrives. stop. This variant does not require any modification of the algorithms and the sensor.
- Another interesting embodiment consists in using two vibration sensors, one per slide. This embodiment makes it possible to define an intermediate position and / or several operating zones.
- the intermediate position here corresponds to the "openwork" position described above.
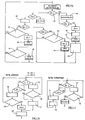
- a first wiper A is disposed on the lower blade 8 of the shutter, on the side of a first slide 3A (or of the corresponding vibration element).
- the second wiper B is placed on the side of the slide 3B (or of the corresponding vibration element) and it is placed on the blade penetrating the slide 3B (or coming into contact with the corresponding vibration element) when the flap arrives in the intermediate position.
- FIG. 14 represents the decoding of the four usable zones.
- SLA and SLB represent the signals delivered by each of the sensors in the presence of vibrations. The algorithms for exploiting this information are within the reach of those skilled in the art.
- FIG. 15 represents a particularly simple embodiment of the logic of the control device 13 indicated by the control algorithms of FIGS. 11 and 12 (alarm function excluded).
- This embodiment uses wired logic and does not require three current integrated circuits (for example TL 084, MC 14538 B, 74 C 74) possibly replaceable by a single circuit of the ASIC type.
- a unipolar established power supply 71 supplies a supply voltage + Vcc to the entire assembly. This voltage is divided by two to allow, at the output of a follower 72, a potential reference used as virtual ground for the analog part of the circuit.
- the piezoelectric detector 7 sees its output signal amplified by two operational amplifiers 74 and 75, with elimination of any continuous components.
- the amplified signal is applied to the input (+) of an operational amplifier 76 which is used in comparator mode.
- comparator 76 corresponds to the saturation voltages of the operational amplifier and are close enough to + Vcc and 0 to attack CMOS type logic.
- Each detected and amplified vibration causes the output of comparator 76 (equivalent to the signal SL of the programmed execution) to go to the "high" state as long as the amplified level is greater than a reference voltage applied to the input ( -) of comparator 76 by a resistive divider bridge.
- Amplifiers 72, 73, 74, 75, 76 belong to the same integrated circuit (for example TL084).
- the output of comparator 76 is applied to a monostable 77 (retriggerable one shot, for example MC 14538 B) whose output Q * goes to the low state for a fixed duration T when the input A undergoes a transition from the "low” state to the "high” state.
- This duration T is always counted from the last upward transition of the input if several pulses are applied to it.
- the duration T is chosen so as to be greater than the maximum time separating two pulses during the movement of the wiper on the vibration element.
- the output Q * therefore returns to the high state only if the vibrations disappear for a duration greater than T.
- two flip-flops 78 and 79 record the state present on the Data input. This state is taken from the collectors of two transistors 80 and 81. One or the other of the transistors is conductive in the event of movement. In the Up SM direction, the transistor 80 is conductive. In the SD down direction, transistor 81 is conductive. The collector of the conducting transistor is in the "low” state while the collector of the blocked transistor is in the "high” state.
- the flip-flop 78 or 79 therefore records a "low” state on its output Q * if the vibration ceases while the direction SM or SD is activated.
- This blocked state is maintained as long as the other transistor has not been made conductive, therefore until the user has given an order of movement in the opposite direction.
- the circuit further comprises a switch 84 with three positions: DD, STOP (intermediate position) and DM controlled by the remote control 14.
- transil diodes 85 and 86 designate transil diodes or other protection devices intended to avoid induced potential variations of high amplitude on the emitter of a transistor not connected to ground by the switch 84.
- the senor 7 is designed to emit at least one signal of higher value on the passage of each tooth or slot and the reference value supplied by the reference generator 27 of the processing electronics 23 is fixed so as to that the processing electronics does not deliver a 0 or 1 signal on the SL output until each reception of this higher value signal.
- These signals are counted by the position counter 291 of the microprocessor 29 and the number of signals transmitted is stored in memory 295.
- the program according to FIG. 16 includes the following instructions: a request and initialization (DI) instruction 39, an instruction 40 for scanning the DD input (descent request), an instruction 41 for resetting the position counter 291, a instruction 42 for initializing a counting subroutine, an instruction 43 for copying the value counted by the counter 291 into the position memory 295, an instruction 44 for reading the position counter 291, an instruction 45 for comparing from the value counted to the value stored in 295, an instruction 46 for initializing the counting subroutine, an instruction 47 for comparing the counted value with the stored value, an instruction 48 for initializing a subroutine ascent, an instruction 49 for testing the value counted by the position counter 291 and an instruction 50 for initializing the counting subroutine. Instructions 42, 46 and 50 initialize the same counting routine.
- DI request and initialization
- Instruction 45 tests whether the value counted is greater than or equal to the value stored in the position memory 295.
- the test instruction 47 tests whether the counted value is greater than or equal to the value stored in the position memory 295.
- Instruction 48 allows the shutter to be raised if it has encountered an obstacle.
- Instruction 49 tests whether the counted value is less than or equal to 0.
- This embodiment makes it possible, in the case of the descent of the roller shutter, to distinguish the arrival in the low position (closed position) from the arrival on an obstacle and, in this case, to activate the subroutine of ascent 48 to clear the obstacle.
- the counting and alarm subroutines may or may not include instructions intended to prevent the sending of a stop or alarm order, respectively, before the reception of a certain number of signals.
- the counting and alarm subroutines are developed in Figures 17 and 18 respectively.
- the alarm subroutine is optional.
- the counting subroutine represented in FIG. 17 comprises an instruction 51 for incrementing the reaction time counter 292, an instruction 52 testing whether the reaction time counted by the counter 292 is greater than the reaction time stored in the memory 294, an instruction 53 for incrementing / decrementing the position counter 291 and an instruction 54 for resetting the reaction time counter 292.
- the outputs SM and SD are set to zero if instruction 52 tests that the time of reaction counted is greater than the memorized value. As pointed out above, we can delete the instructions S1 and S2 if we refrain from introducing a reaction time.
- the alarm subroutine represented in FIG. 18 includes an instruction 55 for incrementing an alarm reaction time counter, an instruction 56 testing whether the reaction time counted is greater than the memorized time, an instruction 57 for resetting the alarm reaction time counter to zero, an instruction 58 for incrementing a counter for variation of the minimum alarm position, an instruction 59 testing whether the value counted by the mini alarm position variation counter is greater than or equal to a value stored in memory 294 and an instruction 60 for resetting the mini alarm position variation counter to zero.
- Instructions 55 and 56 can be deleted if the introduction of a reaction time is dispensed with.
- This embodiment makes it possible, as in the initial embodiment, to avoid stops or alarms resulting from false faults.
- the characteristic position signals obtained by means of a toothed or grooved vibrating element, as described in the previous embodiment, can be used to determine intermediate positions of the roller shutter.
- each signal is assigned a number corresponding to a tooth or a slot and the microprocessor 29 also has a memory for storing the number of signal, memory which can be programmed manually or by programming according to the total number of signals emitted during the movement of the roller shutter between its extreme positions, as well as the DPI (intermediate position request) entry shown in Figure 8.
- the program represented in FIG. 16 is supplemented by the subroutines represented in FIGS. 19 and 20.
- the subroutine shown in Figure 19 is an intermediate position request subroutine. It includes an instruction 61 for testing the state of the DPI input (intermediate position request), a test instruction 62 testing whether the value of counted signals is greater than the value stored in the memory for storing the signal number corresponding to an intermediate position, a test instruction 63 testing whether the counted value is less than the stored value and an instruction 64 initializing a DPI counting subroutine (request for intermediate position). Instructions 65 and 66 can be deleted if the introduction of a reaction time is dispensed with.
- DPI 1 (intermediate position request)
- the program continues with the test instruction 62 which tests whether the number of signals counted is greater than the stored number counted from the high position. If the counted value is not greater than the memorized value, the program continues with the test instruction 63. If 63 tests that the counted value is less than the memorized value, which means that the wiper is above from the desired intermediate position, the SD output then changes to 1 and the program continues with the DPI counting routine, as shown in Figure 20.
- instruction 62 tests that the counted value is greater than the stored signal number, this means that the wiper is below the intermediate position.
- the output SM is set to 1 and the instruction 64 ′ calls a DPI counting subroutine analogous to the subroutine represented in FIG. 20, but without the ascent subroutine 67 since there is (already) an order climb.
- the DPI counting subroutine is only initialized when going down. Its function is to test if we still have a vibration when we have a descent order. If the vibrations stop, it means that the shutter has encountered an obstacle.
- the descent subroutine comprises an instruction 65 (optional) for incrementing the reaction time counter 292, a test instruction 66 (optional) testing whether the reaction time counted is greater than the reaction time stored in memory 293, an ascent routine 67, an instruction 68 for incrementing / decrementing the position counter 291 and an instruction 69 for resetting the reaction time counter 292.
- This subroutine is identical to the subroutine counting routine.
- This embodiment makes it possible to automatically obtain the closure stop in a position located between the extreme positions and it is particularly advantageous, for example, to stop a rolling shutter in openwork position, that is to say in a low position in which the shutter blades are not stacked on top of each other.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Operating, Guiding And Securing Of Roll- Type Closing Members (AREA)
- Paper (AREA)
- Portable Nailing Machines And Staplers (AREA)
- Fuel-Injection Apparatus (AREA)
- Power-Operated Mechanisms For Wings (AREA)
- Eye Examination Apparatus (AREA)
- Input Circuits Of Receivers And Coupling Of Receivers And Audio Equipment (AREA)
- Measurement Of Mechanical Vibrations Or Ultrasonic Waves (AREA)
- Shutters For Cameras (AREA)
- Preliminary Treatment Of Fibers (AREA)
Abstract
Description
- La présente invention a pour objet un dispositif générateur de signaux caractéristiques du déplacement d'un moyen de fermeture, tel que volet, enroulable ou non, store ou porte.
- De tels générateurs sont utilisés pour la commande et le contrôle du déplacement de moyens de fermeture, en particulier pour la détection d'obstacles, la détection de tentatives d'intrusion et la commande de l'arrêt du moyen de fermeture en fin de course.
- Un dispositif générateur de signaux associé à un volet roulant motorisé est décrit dans le brevet FR 2 657 646. Ce générateur comprend une poulie montée sur l'axe d'enroulement du volet roulant et sur laquelle est enroulé un élément souple dont l'autre extrémité est reliée à l'extrémité du volet roulant, de telle sorte que le déroulement du volet entraîne la poulie dont l'axe est relié mécaniquement à un générateur de signaux, par exemple un moteur synchrone. Le générateur, disposé latéralement sur l'axe d'enroulement, nécessite donc un espace qui n'est pas toujours disponible dans une embrasure de fenêtre ou un encadrement de porte. D'autre part, l'élément souple reliant la poulie du générateur à la barre finale du volet roulant est peu esthétique et cet élément souple peut être accroché accidentellement ou détérioré en raison de son passage non protégé, un tel incident étant susceptible de perturber sérieusement le fonctionnement du volet roulant.
- La présente invention a pour but d'obvier à ces inconvénients.
- Le dispositif générateur de signaux selon l'invention est caractérisé en ce qu'il comprend un frotteur solidaire du moyen de fermeture, un élément rigide fixe susceptible d'être entraîné en vibrations par le frotteur et s'étendant sur au moins la longueur de la course du moyen de fermeture de manière à ce que le frotteur frotte sur l'élément rigide lors du déplacement du moyen de fermeture, et un capteur de vibrations monté rigidement sur l'élément rigide et délivrant un signal caractéristique de ces vibrations.
- Les moyens de fermeture comprennent généralement des moyens de guidage en forme de glissière, de telle sorte que le frotteur peut se déplacer dans la glissière en étant caché et parfaitement protégé.
- L'élément rigide vibrant peut être constitué par la glissière elle-même ou par la coulisse de guidage d'une porte basculante ou à déplacement latéral ou par un élément rapporté sur cette glissière ou cette coulisse.
- L'invention a également pour objet une fermeture motorisée équipée d'au moins un dispositif générateur de signaux selon l'invention, cette fermeture étant caractérisée en ce qu'elle comprend en outre des moyens électroniques de traitement du signal émis par le capteur de vibrations et des moyens de commande du ou des moteurs d'entraînement du moyen de fermeture en fonction des ordres reçus des moyens de traitement du signal.
- Les moyens de commande peuvent assurer aussi bien l'arrêt de la fermeture, lorsque celle-ci rencontre un obstacle, que le déclenchement d'une alarme en cas de tentative d'intrusion, ainsi que l'arrêt de la fermeture en fin course et/ou en des positions intermédiaires, en utilisant un élément vibrant denté ou cannelé permettant d'obtenir une vibration présentant des variations périodiques correspondant à ses dents ou cannelures et par conséquent caractéristiques de la position de la fermeture.
- Pour la commande d'un volet roulet à lames empilables, il est possible d'obtenir un arrêt en position ajourée et un arrêt en position empilée au moyen de deux frotteurs, dont l'un est situé sur la lame inférieure et l'autre sur la lame pénétrant dans la glissière juste avant que la lame inférieure arrive en butée.
- L'utilisation de deux capteurs de vibrations, un par glissière, et de deux frotteurs permet de définir une position intermédiaire et/ou plusieurs zones de fonctionnement.
- Le dessin annexé représente, à titre d'exemple, des formes d'exécution de l'invention.
- La figure 1 est une vue en coupe d'un volet roulant équipé d'un générateur selon l'invention.
- La figure 2 représente un détail de la figure 1.
- La figure 3 représente une variante d'exécution de la figure 2.
- La figure 4 représente le détail, en coupe verticale selon IV-IV de la figure 5, d'un exemple d'exécution de l'élément vibrant et du frotteur.
- La figure 5 est une vue en coupe selon V-V de la figure 4.
- Les figures 6 et 7 représentent deux autres formes d'exécution de l'élément vibrant.
- La figure 8 représente le schéma des moyens de traitement du signal et des moyens de commande du moyen roulant représenté à la figure 1.
- La figure 9 représente une première forme d'exécution du générateur de signal de référence.
- La figure 10 représente une forme d'exécution simplifiée du générateur de signal de référence.
- La figure 11 représente le programme principal des moyens de commande.
- La figure 12 représente une variante de sous-programme pour la commande de l'arrêt du volet roulant.
- La figure 13 représente une variante de sous-programme pour le déclenchement d'une alarme en cas de tentative d'intrusion.
- La figure 14 représente le circuit de décodage d'une variante d'exécution à deux capteurs.
- La figure 15 représente le schéma d'une exécution câblée du dispositif de commande.
- La figure 16 représente une variante du programme principal pour le cas d'une émission de signaux à variations périodiques.
- La figure 17 représente le sous-programme de comptage des variations.
- La figure 18 représente le sous-programme d'alarme.
- La figure 19 représente une modification du programme de la figure 16 permettant d'obtenir des positions d'arrêt intermédiaires.
- La figure 20 représente le sous-programme de comptage de la variante représentée à la figure 19.
- La figure 1 représente, en coupe verticale, une embrasure de fenêtre 1 dans laquelle est monté un volet roulant 2 guidé dans une paire de glissières 3 et s'enroulant sur un axe d'enroulement 4 monté dans un boîtier 5 et entraîné par un moteur non représenté. Le moteur est à deux enroulements assurant la rotation de l'arbre d'enroulement 4 dans deux sens opposés. Le volet roulant 2 est représenté ici en position totalement déroulée. Sa dernière lame est munie d'une butée de fin de course 6 constituée par un ergot destiné à venir buter contre le haut de l'embrasure 1. La glissière 3 est prolongée par une partie 3a dans le boîtier 5 et à l'extrémité de ce prolongement 3a est fixé rigidement un capteur de vibrations 7. Sur la dernière lame 8 du volet roulant est en outre fixé un frotteur, par exemple une lame en acier dont l'extrémité libre frotte sur l'une des faces intérieures de la glissière dont la surface a été rendue rugueuse ou granuleuse par sablage.
- Lors du déplacement du volet roulant 2, le frottement du frotteur 11 sur la glissière 3 engendre des vibrations qui sont transmises par la glissière au capteur de vibrations 7. Le capteur de vibrations peut être de type accéléromètre ou détecteur de chocs piézo-ou ferro-électriques, de typesilicium micro-usiné à électronique de traitement intégré, par exemple un capteur commercialisé par MURATA sous la dénomination commerciale PKS-4A.
- Les signaux émis par le capteur 7 sont traités par un dispositif de commande 13 commandant le moteur de l'axe d'enroulement 4. L'installation est complétée par une commande à distance 14, reliée galvaniquement ou non à l'électronique de commande 13 et comportant des touches permettant de commander la montée, la descente et l'arrêt du volet roulant.
- Au lieu de frotter directement sur la glissière, le frotteur peut frotter sur un élément vibrant auxiliaire. Le détail d'un mode d'exécution est représenté à la figure 2. L'élément vibrant est constitué d'une lame d'acier 9 fixée sur l'une des faces intérieures 10 de la glissière 3 et sur laquelle frotte un frotteur 11. La face opposée 12 de la glissière est lisse et la dernière lame 8 est munie d'un patin 15 glissant sur la face 12. Dans le cas de la figure 2, la butée 6 vient buter contre l'embrasure lorsque le volet arrive en position haute, les vibrations cessent et le détecteur 7 détecte l'absence de vibration et commande l'arrêt du moteur.
- La figure 3 représente une variante d'exécution de la figure 2, dans laquelle la butée 6 est supprimée et l'élément vibrant 9 est plus court. La position haute du volet est atteinte lorsque le frotteur quitte l'élément vibrant 9. Cette exécution permet un arrêt du volet en douceur, sans traction brusque. Elle est particulièrement avantageuse dans le cas de volets roulants fragiles.
- Les figures 4 et 5 représentent, plus en détail, un mode d'exécution et de montage du frotteur 11. Celui-ci est fixé par rivetage, soudage ou clipsage en un point 17 à l'intérieur de la dernière lame tubulaire 8 du volet roulant et traverse cette lame à travers une fente 18. Le frotteur 11 présente une extrémité recourbée 11a en contact avec l'élément vibrant constitué ici par la glissière 3 elle-même.
- A la figure 6, l'élément vibrant est constitué d'une lame rugueuse 19 fixée sur la glissière au moyen d'un adhésif 20.
- Dans l'exécution selon la figure 7, la lame rugueuse 19 est remplacée par une lame 21 présentant un profil dentelé 22. Ce profil pourrait être également crénelé. Un tel profil permet d'obtenir une variation périodique de l'amplitude des vibrations, chaque variation correspondant à une dent ou un créneau. Le comptage de ces variations permet de déterminer la position du frotteur, c'est-à-dire la position du volet roulant.
- Le principe décrit ci-dessus est applicable à tout moyen de fermeture guidé dans son déplacement, que ce soit par une glissière, un rail ou des gonds.
- Le dispositif de commande 13 est représenté schématiquement à la figure 8. Il est constitué d'une électronique de traitement 23 et d'une électronique de commande 24 pour la commande du moteur 25.
- L'électronique de traitement comprend un amplificateur-démodulateur 26, un générateur de référence 27 et un comparateur 28. L'amplificateur-démodulateur 26 a pour fonction de recevoir le signal délivré par le capteur, de l'amplifier, éventuellement de le redresser, de le lisser et de délivrer au comparateur 28 auquel est appliquée, d'autre part, une valeur de référence délivrée par le générateur de référence 27.
- Le générateur de référence 27 peut être constitué par un simple diviseur de tension R1/R2, tel que représenté à la figure 10, délivrant une valeur de tension fixe. Le générateur de référence 27 peut également être conçu pour délivrer une valeur de référence dérivée de la valeur du signal capté, comme représenté à la figure 9. Dans ce cas, il est constitué d'un diviseur de tension R1/R2 en parallèle à un condensateur C, le tout en série avec une résistance R3 auquelle est appliqué le signal capté. Ceci permet de tenir compte de la variation du signal capté dû au vieillissement du capteur ou à toute autre influence et s'adapter automatiquement au niveau de signal correspondant à l'utilisation.
- Le comparateur 28 a pour fonction de comparer la valeur du signal reçu de l'amplificateur-démodulateur 26 à celle reçue du générateur de référence 27 et de délivrer un signal logique (0 ou 1) selon le niveau relatif des valeurs comparées. Dans le cas particulier, le comparateur 28 délivre le signal 1 lorsque la valeur du signal capté est supérieure à la valeur de référence.
- L'électronique de commande 24 comprend un microprocesseur 29 comportant un programme principal (figure 11), des entrées DM (demande de montée), DD (demande de descente), DS (demande de stop), des sorties SM (sortie de montée), SD (sortie de descente), SA (alarme) et une entrée SL (sortie logique) reliée à la sortie du comparateur 28. Sa fonction principale est de faire passer à 0 les sorties SM, SD, SA, lorsque le signal reçu en SL = 0.
- Tel que représenté au dessin, le microprocesseur 29 comporte en outre une quatrième entrée DPI (demande de position intermédiaire), un compteur de position 291 et un compteur de temps de réaction 292, une mémoire 294 pour le stockage du temps de réaction alarme ou de la variation de position minimale pour le déclenchent d'une alarme et une mémoire 295 pour le stockage de la valeur du compteur de position. Ces éléments sont utilisés dans une forme d'exécution plus évoluée de l'invention qui sera décrite en relation avec les figures 16 et 17.
- L'électronique de commande 24 comporte en outre un organe de commutation de puissance 30 relié au réseau PN et à chacun des enroulements sens 1, sens 2 du moteur 25, par des sorties M et D, ainsi qu'à une alarme 31 par une sortie A, et aux sorties SM, SD, SA du microprocesseur 29. Sa fonction est d'interrompre l'alimentation sur M, D et A, lorsque les sorties SM, SD et SA = 0. Le dispositif de commande 13 comporte en outre une alimentation stabilisée 32 pour l'alimentation de différents composants.
- Le mode d'exécution correspondant au programme représenté à la figure 11 comprend deux indicateurs de fin de course ou d'obstacle, en montée et en descente FCM et FCD positionnés à l'état haut par les sous-programmes d'arrêt, respectivement dans le sens de la montée (M) et de la descente (D) et remis à zéro lors d'un mouvement dans le sens inverse.
- Le fonctionnement selon le programme représenté à la figure 11 est le suivant :
- La première instruction effectue la scrutation cyclique des entrées DM, DD, DS, SL du microprocesseur. Si DS = 1 (demande de stop activée), les sorties SM et SD sont mises à zéro et le programme reboucle.
- Si DS = 0 (demande de stop non activée), le programme teste ensuite l'entrée DM (demande de montée). Si DM = 1, l'instruction suivante teste l'indicateur FCM. Si FCM = 1 (volet en position haute), le programme reboucle. Si FCM = 0, l'instruction suivante fait passer la sortie SM à 1, puis appelle le sous-programme d'arrêt qui teste l'entrée SL, c'est-à-dire le signal provenant du capteur 7. Si SL = 1 (présence d'une vibration), l'instruction suivante met l'indicateur de fin de course bas à 0 (FCD = 0) et le programme reboucle sans donner d'ordre de montée, puisque la présence d'un signal de vibrations signifie que le volet n'a pas rencontré d'obstacle ou que son frotteur n'a pas encore quitté l'élément vibrant 19 (figure 3), c'est-à-dire que le volet n'a pas encore atteint sa position haute.
- Si SL = 0 (absence de vibration), l'instruction suivante fait passer à 0 la sortie SM, l'absence de vibration signifiant que le volet roulant a rencontré un obstacle ou qu'il a atteint son point haut (figures 2 ou 3) et met l'indicateur FCM à 1.
- Si le test de DM donne 0, le programme teste l'entrée DD. Si DD = 1 (demande de descente), l'instruction suivante teste l'indicateur FCD. Si FCD = 1 (volet déjà en position basse), le programme reboucle sans donner d'ordre d'arrêt. Si FCD = 0, l'instruction suivante met SD = 1 et l'instruction suivante teste la sortie SL. Si SL = 0 (absence de vibration), l'instruction suivante met la sortie SD à 0 (ordre d'arrêt) et l'indicateur FCD à 1. Si SL = 1, l'indicateur FCM est mis à 0 et le programme reboucle sans donner d'ordre de descente.
- Si le test donne DD = 0 (absence de demande de descente), le sous-programme alarme teste l'entrée SL. Si SL = 0, aucune alarme n'est déclenchée, car cela signifie que le volet roulant est immobile et qu'il n'y pas eu tentative d'intrusion. Par contre, si le test donne SL = 1, cela signifie que le volet roulant se déplace en l'absence d'ordre de montée et de descente et la sortie SA passe à 1 ce qui a pour effet de déclencher l'alarme.
- Cette forme de réalisation permet donc l'arrêt en fin de course en point d'arrêt haut, bas et en cas d'obstacles, par détection de l'interruption des vibrations, ainsi que la détection d'une tentative d'intrusion par apparition de vibrations.
- Dans une forme simplifiée, le sous-programme alarme pourrait être supprimé.
- Selon une autre forme de réalisation, l'électronique de commande 24 est prévue, de plus, pour tester que le changement de l'ordre logique sur la sortie SL du comparateur demeure un certain temps avant de suspendre la transmission des ordres de déplacement sens 1/sens 2 ou avant de transmettre un ordre d'alarme.
- Dans ce cas, les sous-programmes d'arrêt Montée et Descente de la figure 11 sont remplacés par le sous-programme selon figure 12 et le microprocesseur comporte une mémoire 293 stockant la valeur de temps de réaction d'arrêt et un compteur de temps de réaction à l'arrêt 292.
- Selon figure 12, si le test de la sortie logique donne SL = 0, l'instruction 33 incrémente le compteur de temps de réaction arrêt 292. L'instruction suivante est une instruction de test 34 qui compare la valeur comptée à la valeur mémorisée. Si la valeur comptée est supérieure à la valeur mémorisée, alors seulement les sorties SM et SD sont mises à zéro par l'instruction suivante et le programme reboucle. Simultanément, l'instruction 35 remet à 0 le compteur 292.
- Par contre, aussi longtemps que l'instruction de test 34 teste que la valeur comptée est inférieure à la valeur mémorisée, le programme reboucle sans émission d'ordre d'arrêt.
- Le sous-programme d'alarme de la figure 11 est également complété comme représenté à la figure 13, de manière analogue au sous-programme d'arrêt de la figure 12. Le microprocesseur comporte une mémoire 294 stockant la valeur de temps de réaction d'alarme.
- Si SL = 1, l'instruction 36 incrémente le compteur 292 et l'instruction 37 compare la valeur comptée à la valeur mémorisée dans la mémoire 294. Si la valeur comptée est supérieure à la valeur mémorisée, la sortie SA passe à 1 et une alarme est déclenchée. Simultanément, l'instruction 38 remet le compteur à 292 à 0.
- Cette forme d'exécution permet d'éviter les arrêts ou les déclenchements d'alarme résultant de faux défauts, tels que ceux provoqués par des chocs, des points durs dans la glissière, des obstacles fugitifs.
- Dans le cas de systèmes de fermeture à lames empilables ou équivalents, le dispositif d'arrêt-sécurité qui vient d'être décrit conduit à l'arrêt de la descente en position lames non empilées (position dite "ajours" si le frotteur a été disposé sur la lame basse de la fermeture (lame 8).
- Si l'utilisateur préfère un arrêt en position empilée (totalement fermée), il convient de disposer un deuxième frotteur sur la lame pénétrant dans la glissière 3, au contact de l'élément de vibration, juste avant que la lame basse n'arrive en butée. Cette variante ne nécessite aucune modification des algorithmes et du capteur.
- Une autre forme de réalisation intéressante consiste à utiliser deux capteurs de vibration, un par glissière. Cette forme de réalisation permet de définir une position intermédiaire et/ou plusieurs zones de fonctionnement. La position intermédiaire correspond ici à la position "ajours" décrite plus haut.
- Un premier frotteur A est disposé sur la lame basse 8 du volet, du côté d'une première glissière 3A (ou de l'élément de vibration correspondant). Le second frotteur B est disposé du côté de la glissière 3B (ou de l'élément de vibration correspondant) et il est placé sur la lame pénétrant dans la glissière 3B (ou entrant en contact de l'élément de vibration correspondant) au moment où le volet arrive en position intermédiaire.
- La figure 14 représente le décodage des quatre zones utilisables. SLA et SLB représentent les signaux délivrés par chacun des capteurs en présence de vibrations. Les algorithmes d'exploitation de ces informations sont à la portée de l'homme de l'art.
- Si on a un signal sur SLA et SLB (A=1), cela signifie que la lame inférieure du volet est encore en mouvement alors que l'autre lame est déjà dans les glissières. Cela correspond à une zone très réduite de transition entre l'empilage des lames et l'ouverture.
- Si on a un signal sur SLB seulement alors B=1, ce qui correspond à un mouvement dans la zone d'empilage.
- Si on a un signal sur SLA seulement alors C=1, ce qui correspond à un mouvement dans la zone d'ouverture.
- Si on n'a aucun signal alors D=1. Dans ce cas, il convient de tester si l'on a un ordre de Montée (SM) ou de Descente (SD).
- Si SM=1, cela signifie que le volet est en butée haute.
- Si SD=1, on peut avoir deux situations différentes selon l'état précédent des sorties B et C.
- Si on avait C=1, D=1 doit être interprété comme la présence d'un obstacle empêchant la descente du volet.
- Si on avait B=1, D=1 signifie que les lames du volet sont complètement empilées et que le volet est donc totalement fermé.
- La figure 15 représente un mode de réalisation particulièrement simple de la logique du dispositif de commande 13 indiquée par les algorithmes de commande des figures 11 et 12 (fonction alarme exclue).
- Ce mode de réalisation utilise la logique câblée et ne nécessite trois circuits intégrés courants (par exemple TL 084, MC 14538 B, 74 C 74) éventuellement remplaçables par un circuit unique de type ASIC. Une alimentation stablisée unipolaire 71 fournit une tension d'alimentation +Vcc à l'ensemble du montage. Cette tension est divisée par deux pour permettre, en sortie d'un suiveur 72, une référence de potentiel utilisée comme masse virtuelle pour la partie analogique du montage.
- Le détecteur piézo-électrique 7 voit son signal de sortie amplifié par deux amplificateurs opérationnels 74 et 75, avec élimination d'éventuelles composantes continues.
- Le signal amplifié est appliqué sur l'entrée (+) d'un amplificateur opérationnel 76 qui est utilisé en mode comparateur.
- Les niveaux de sortie du comparateur 76 correspondent alors aux tensions de saturation de l'amplificateur opérationnel et sont suffisamment proches de +Vcc et de 0 pour attaquer une logique de type CMOS. Chaque vibration détectée et amplifiée provoque le passage de la sortie du comparateur 76 (équivalente au signal SL de l'exécution programmée) à l'état "haut" tant que le niveau amplifié est supérieur à une tension de référence appliquée à l'entrée (-) du comparateur 76 par un pont diviseur résistif.
- Les amplificateurs 72, 73, 74, 75, 76 appartiennent à un même circuit intégré (par exemple TL084). La sortie du comparateur 76 est appliquée à un monostable 77 (retriggerable one shot, par exemple MC 14538 B) dont la sortie Q* passe à l'état bas pendant une durée fixe T lorsque l'entrée A subit une transition de l'état "bas" à l'état "haut". Cette durée T est toujours comptée à partir de la dernière transition montante de l'entrée si plusieurs impulsions sont appliquées à celle-ci.
- La durée T est choisie de façon à être supérieure au temps maximum séparant deux impulsions lors du mouvement du frotteur sur l'élément de vibration. La sortie Q* ne repasse donc à l'état haut que si les vibrations disparaissent pendant une durée supérieure à T.
- Dans ce cas, deux bascules 78 et 79, de type D Flip-Flop (exemple MM 74 C 74) enregistrent l'état présent sur l'entrée Data. Cet état est prélevé sur les collecteurs de deux transistors 80 et 81. L'un ou l'autre des transistors est conducteur en cas de mouvement. Dans le sens Montée SM, le transistor 80 est conducteur. Dans le sens Descente SD, le transistor 81 est conducteur. Le collecteur du transistor conducteur est à l'état "bas" alors que le collecteur du transistor bloqué est à l'état "haut".
- La bascule 78 ou 79 enregistre donc un état "bas" sur sa sortie Q* si la vibration cesse alors que le sens SM ou SD est activé.
- Cela a pour effet de bloquer la conduction du transistor correspondant.
- Cet état bloqué se maintient tant que l'autre transistor n'a pas été rendu conducteur, donc tant que l'utilisateur n'a pas donné un ordre de mouvement dans le sens opposé.
- Lorsque l'autre transistor est rendu conducteur, le passage à l'état "bas" de son collecteur provoque une action de remise à l'état "haut" de la sortie Q* de la bascule par action sur son entrée Preset.
- Le circuit comprend en outre un commutateur 84 à trois positions : DD, STOP (position intermédiaire) et DM commandé par la commande à distance 14.
- 85 et 86 désignent des diodes transil ou autres dispositifs de protection destinées à éviter des variations de potentiel induites de forte amplitude sur l'émetteur d'un transistor non relié à la masse par le commutateur 84.
- On décrira maintenant, en relation avec les figures 16, 17 et 18, une forme d'exécution utilisant un élément vibrant dentelé ou cannelé tel que l'élément vibrant 21 de la figure 7.
- Dans ce cas, le capteur 7 est prévu pour émettre au moins un signal de plus forte valeur au passage de chaque dent ou créneau et la valeur de référence fournie par le générateur de référence 27 de l'électronique de traitement 23 est fixé de manière à ce que l'électronique de traitement ne délivre sur la sortie SL un signal 0 ou 1 qu'à chaque réception de ce signal de plus forte valeur. Ces signaux sont comptés par le compteur de position 291 du microprocesseur 29 et le nombre de signaux émis est stocké dans la mémoire 295.
- Le programme correspondant est représenté à la figure 16. En plus des instructions contenues dans le programme de base selon la figure 11, le programme selon la figure 16 comprend les instructions suivantes: une instruction de demande et d'initialisation (DI) 39, une instruction 40 de scrutation de l'entrée DD (demande de descente), une instruction 41 de remise à zéro du compteur de position 291, une instruction 42 d'initialisation d'un sous-programme de comptage, une instruction 43 de recopie de la valeur comptée par le compteur 291 dans la mémoire de position 295, une instruction 44 de lecture du compteur de position 291, une instruction 45 de comparaison de la valeur comptée à la valeur mémorisée dans 295, une instruction 46 d'initialisation du sous-programme de comptage, une instruction 47 de comparaison de la valeur comptée à la valeur mémorisée, une instruction 48 d'initialisation d'un sous-programme de remontée, une instruction 49 de test de la valeur comptée par le compteur de position 291 et une instruction 50 d'initialisation du sous-programme de comptage. Les instructions 42, 46 et 50 initialisent le même sous-programme de comptage.
- L'instruction 45 teste si la valeur comptée est supérieure ou égale à la valeur mémorisée dans la mémoire de position 295.
- L'instruction de test 47 teste si la valeur comptée est supérieure ou égale à la valeur mémorisée dans la mémoire de position 295.
- L'instruction 48 permet la remontée du volet si celui-ci a rencontré un obstacle.
- L'instruction 49 teste si la valeur comptée est inférieure ou égale à 0.
- Le programme se déroule comme représenté à la figure 16 et une description plus détaillée est considérée comme superflue.
- Cette forme d'exécution permet, dans le cas de la descente du volet roulant, de distinguer l'arrivée en position basse (position fermée) de l'arrivée sur un obstacle et, dans ce cas, d'activer le sous-programme de remontée 48 pour dégager l'obstacle.
- Les sous-programmes de comptage et d'alarme peuvent comprendre ou non des instructions destinées à empêcher l'envoi d'un ordre d'arrêt, respectivement d'alarme, avant la réception d'un certain nombre de signaux. Les sous-programmes de comptage et d'alarme sont développés respectivement aux figures 17 et 18. Le sous-programme d'alarme est facultatif.
- Le sous-programme de comptage représenté à la figure 17 comprend une instruction 51 d'incrémentation du compteur de temps de réaction 292, une instruction 52 testant si le temps de réaction compté par le compteur 292 est supérieur au temps de réaction mémorisé dans la mémoire 294, une instruction 53 d'incrémentation/décrémentation du compteur de position 291 et une instruction 54 de remise à zéro du compteur de temps de réaction 292. Les sorties SM et SD sont mises à zéro si l'instruction 52 teste que le temps de réaction compté est supérieur à la valeur mémorisée. Comme souligné plus haut, on peut supprimer les instructions S1 et S2 si on renonce à introduire un temps de réaction.
- Le sous-programme d'alarme représenté à la figure 18 comprend une instruction 55 d'incrémentation d'un compteur de temps de réaction alarme, une instruction 56 testant si le temps de réaction compté est supérieur au temps mémorisé, une instruction 57 de remise à zéro du compteur de temps de réaction alarme, une instruction 58 d'incrémentation d'un compteur de variation de la position minimum alarme, une instruction 59 testant si la valeur comptée par le compteur de variation de position mini alarme est supérieure ou égale à une valeur mémorisée dans la mémoire 294 et une instruction 60 de remise à zéro du compteur de variation de position mini alarme.
- Les instructions 55 et 56 peuvent être supprimées si on renonce à introduire un temps de réaction.
- Cette forme d'exécution permet, comme dans la forme initiale de réalisation, d'éviter les arrêts ou les alarmes résultant de faux défauts.
- Les sous-programmes selon les figures 17 et 18 peuvent être utilisés ensemble ou séparément.
- Les signaux caractéristiques de positions obtenus au moyen d'un élément vibrant denté ou cannelé, tels que décrits dans la forme d'exécution précédente, peuvent être utilisés pour déterminer des positions intermédiaires du volet roulant.
- A cet effet, il suffit de compter les signaux sur la sortie SL de l'électronique de traitement 23. A chaque signal est attribué un numéro correspondant à une dent ou un créneau et le microprocesseur 29 comporte en plus une mémoire de stockage du numéro de signal, mémoire qui peut être programmée manuellement ou par programmation en fonction du nombre total de signaux émis lors du déplacement du volet roulant entre ses positions extrêmes, ainsi que l'entrée DPI (demande de position intermédiaire) représentée à la figure 8.
- Le programme représenté à la figure 16 est complété par les sous-programmes représentés aux figures 19 et 20.
- Le sous-programme représenté à la figure 19 est un sous-programme de demande de position intermédiaire. Il comprend une instruction 61 de test de l'état de l'entrée DPI (demande de position intermédaire), une instruction de test 62 testant si la valeur de signaux comptés est supérieure à la valeur mémorisée dans la mémoire de stockage du numéro du signal correspondant à une position intermédiaire, une instruction de test 63 testant si la valeur comptée est inférieure à la valeur stockée et une instruction 64 initialisant un sous-programme de comptage DPI (demande de position intermédiaire). Les instructions 65 et 66 peuvent être supprimées si on renonce à introduire un temps de réaction.
- Si l'entrée DM (figure 16) = 0, l'instruction 61 teste l'entrée DPI. Si DPI = 0, le programme reboucle ou le sous-programme d'alarme est initialisé si un tel sous-programme existe.
- Si DPI = 1 (demande de position intérmédiaire), le programme se poursuit par l'instruction de test 62 qui teste si le nombre de signaux comptés est supérieur au numéro mémorisé compté à partir de la position haute. Si la valeur comptée n'est pas supérieure à la valeur mémorisée, le programme se poursuit par l'instruction de test 63. Si 63 teste que la valeur comptée est inférieure à la valeur mémorisée, ce qui signifie que le frotteur est au-dessus de la position intermédiaire désirée, la sortie SD passe alors à 1 et le programme se poursuit par le sous-programme de comptage DPI, tel que représenté à la figure 20.
- Si l'instruction 63 teste que la valeur comptée est supérieure ou égale au numéro de signal mémorisé, ce qui signifie que la position intermédiaire est atteinte, les sorties SM et SD sont mises à zéro et le moteur 25 n'est pas alimenté.
- Si l'instruction 62 teste que la valeur comptée est supérieure au numéro de signal mémorisé, cela signifie que le frotteur est en dessous de la position intermédiaire. La sortie SM est mise à 1 et l'instruction 64' appelle un sous-programme de comptage DPI analogue au sous-programme représenté à la figure 20, mais sans le sous-programme de remontée 67 puisqu'on a (déjà) un ordre de montée.
- Le sous-programme de comptage DPI, tel que représenté à la figure 20 n'est initialisé qu'en descente. Sa fonction est de tester si on a encore une vibration alors qu'on a un ordre de descente. Si les vibrations cessent, cela signifie que le volet a rencontré un obstacle. Le sous-programme descente comprend une instruction 65 (facultative) d'incrémentation du compteur de temps de réaction 292, une instruction de test 66 (facultative) testant si le temps de réaction compté est supérieur au temps de réaction mémorisé dans la mémoire 293, un sous-programme de remontée 67, une instruction 68 d'incrémentation/décrémentation du compteur de position 291 et une instruction 69 de remise à zéro du compteur de temps de réaction 292. Ce sous-programme est identique au sous-programme de comptage de la figure 17 à la différence qu'il comporte en plus le sous-programme de remontée 67, non développé, qui assure une légère remontée du volet lorsque celui-ci a rencontré un obstacle, c'est-à-dire si SL = 0 alors que SD = 1.
- Cette forme de réalisation permet d'obtenir automatiquement l'arrêt de la fermeture dans une position située entre les positions extrêmes et elle est particulièrement intéressante, par exemple, pour arrêter un volet roulant en position ajourée, c'est-à-dire dans une position basse dans laquelle les lames du volet ne sont pas empilées les unes sur les autres.
Claims (19)
- Dispositif générateur de signaux caractéristiques du déplacement d'un moyen de fermeture, tel que volets, stores ou portes, caractérisé en ce qu'il comprend un frotteur (9) solidaire du moyen de fermeture, un élément rigide fixe (3; 16, 19; 21) susceptible d'être entraîné en vibrations par le frotteur et s'étendant sur au moins la longueur de la course des moyens de fermeture de manière à ce que le frotteur frotte sur l'élément rigide lors du déplacement du moyen de fermeture, et un capteur de vibrations (7) monté rigidement sur ledit élément rigide vibrant et délivrant un signal caractéristique de ces vibrations.
- Dispositif selon la revendication 1, caractérisé en ce que la surface de l'élément rigide fixe en contact avec le frotteur est dentelée (21) ou canelée de manière à obtenir des vibrations dont l'intensité varie périodiquement.
- Dispositif selon la revendication 1 ou 2, caractérisé en ce que l'élément rigide vibrant est constitué par une glissière ou un rail de guidage du moyen de fermeture.
- Dispositif selon la revendication 1 ou 2, caractérisé en ce que l'élément rigide vibrant (16; 19; 21) est fixé sur une glissière ou rail de guidage du moyen de fermeture.
- Fermeture motorisée équipée d'un dispositif générateur de signaux selon l'une des revendications 1 à 4, caractérisée en ce qu'elle comprend en outre des moyens électroniques (23) de traitement du signal émis par le capteur de vibrations (7) et des moyens de commande (24) du ou des moteurs (25) d'entraînement du moyen de fermeture en fonction des ordres reçus des moyens de traitement du signal.
- Fermeture selon la revendication 5, comprenant un moteur (25) à deux enroulements pour l'entraînement du moyen de fermeture dans le sens de la fermeture et de l'ouverture, caractérisée en ce que les moyens de traitement du signal (23) comprennent un amplificateur/ démodulateur de signal (26), un générateur de référence (27) délivrant une valeur de référence, un comparateur (28) auquel sont appliqués le signal démodulé et la valeur de références, ce comparateur délivrant un signal logique (0, 1) selon la position relative des valeurs comparées, et que les moyens de commande comprennent un microprocesseur (29) comportant un programme principal (figure 11) des entrées de montée (DM), de descente (DD), de stop (DS), des sorties de montée (SM) et de descente (SD) et une entrée (SL) reliée à la sortie du comparateur, et dont la fonction principale est de faire passer à 0 les sorties de montée (SM) et de descente (SD) lorsque le signal reçu du comparateur est égal à 0, et un organe de commutation de puissance (30) relié à chacun des enroulement du moteur par les sorties montée et descente et aux sorties montée et descente du microprocesseur et dont la fonction est d'interrompre l'alimentation sur les sorties montée et descente (M, D) de l'organe de commutation lorsque les sorties de montée et de descente du microprocesseur sont égales à 0.
- Fermeture selon la revendication 6, caractérisée par le fait que le microprocesseur (29) comprend en outre une mémoire de stockage du temps de réaction et un compteur de temps de réaction et que le programme principal est complété par un sous-programme (figures 12 et 13) permettant de tester que le changement de la valeur logique sur la sortie (SL) du comparateur (28) demeure un temps déterminé avant d'émettre un ordre d'arrêt du moteur et/ou une alarme.
- Fermeture selon la revendication 6, caractérisé en ce que la surface (22) de l'élément rigide vibrant en contact avec le frotteur est crénelé ou dentelé de manière à obtenir une vibration dont l'amplitude varie au passage de chaque créneau ou dent, que le capteur (7) est agencé pour émettre un signal dont l'amplitude varie en fonction de celle de la vibration, que ladite valeur de référence est fixée de manière que le comparateur (28) ne délivre un signal logique (0, 1) qu'à chaque changement d'amplitude du signal émis par le capteur et que le microprocesseur (29) comporte en outre un compteur comptant le changement d'état à la sortie du comparateur et une mémoire stockant le nombre de changement d'état compté lorsque le moyen de fermeture parcourt toute sa longueur de déplacement, et des moyens de comparaison du nombre de changement d'états comptés lors du déplacement du moyen de fermeture au nombre stocké dans la mémoire, de manière à faire une distinction entre l'arrivée en position de fermeture et l'arrivée sur un obstacle (figure 16) et dans ce cas d'activer éventuellement un sous-programme de remontée partielle.
- Fermeture selon la revendication 8, caractérisée en ce que le microprocesseur (29) comprend en outre un compteur (292) de temps de réaction, une mémoire (294) de stockage d'une valeur de temps de réaction et que le programme principal est complété par un sous-programme (figure 17) permettant de tester que le changement de la valeur logique sur la sortie (SL) du comparateur demeure un temps déterminé avant d'émettre un ordre d'arrêt.
- Fermeture selon la revendication 8 ou 9, caractérisée en ce qu'elle comprend une alarme (31) et que le microprocesseur comprend en outre une mémoire destinée à stocker un nombre de signaux (SL) déterminé et un compteur de signal d'alarme et que le programme (figure 16) est complété par un sous-programme d'alarme (figure 18) assurant que l'alarme n'est déclenchée que lorsque la valeur comptée est supérieure à la valeur mémorisée.
- Fermeture selon l'une des revendications 8, 9 ou 10, caractérisé en ce que les moyens de commande (24) comportent en outre une mémoire de stockage d'un numéro de signal correspondant à l'état du compteur lorsque la fermeture est en position intermédiaire et une entrée de demande de position intermédiaire (DPI) et que le programme comporte en outre un sous-programme de demande de position intermédiaire (figure 19) et un sous-programme de comptage de signaux (figure 20), de manière à permettre d'obtenir l'arrêt de la fermeture dans la position intermédiaire.
- Fermeture selon la revendication 11, caractérisé en ce que le sous-programme de comptage de demande de position intermédiaire (figure 20) comprend en outre un sous-programme de remontée (67).
- Dispositif de commande de fermeture motorisée à mouvement guidé comportant des repères de position (22), des moyens de détection (21, 11, 7, 13) de ces repères de position, un compteur (291) pour compter les repères de position rencontrés par la fermeture lors de son déplacement, une mémoire (295) vers laquelle sont mémorisées des positions déterminées et une unité logique de traitement (24) pour adresser des ordres au moteur (25) en fonction des repères de position comptés et des positions mémorisées, caractérisé en ce que les moyens de détection comprennent un frotteur (11) solidaire du moyen de fermeture, un élément rigide fixe (3; 9, 19; 21) susceptible d'être entraîné en vibrations par le frotteur et s'étendant sur au moins la longueur de la course des moyens de fermeture de manière à ce que le frotteur frotte sur l'élément rigide lors du déplacement du moyen de fermeture, un capteur de vibrations (7) monté rigidement sur ledit élément rigide vibrant et délivrant un signal caractéristique de ces vibrations et des moyens électroniques de traitement (23) du signal émis par le capteur.
- Fermeture motorisée selon l'une des revendications 5, 6 ou 7, dont le moyen de fermeture est constitué d'un volet roulant dont les lames peuvent être empilées ou espacées en position de fermeture, caractérisée en ce qu'elle comprend un premier frotteur solidaire de la lame basse (8) et un second frotteur solidaire d'une lame haute pénétrant dans la glissière (3) et arrivant en contact avec l'élément vibrant (3; 9; 19) juste avant que la lame basse (8) arrive en butée en position de fermeture, de manière à ne stopper le moteur qu'après empilage de toutes les lames se trouvant dans la glissière.
- Fermeture motorisée selon l'une des revendications 5, 6 ou 7 dont le moyen de fermeture est un volet roulant dont les lames sont guidées dans deux glissières, caractérisée en ce qu'elle comprend un élément vibrant et un capteur dans chacune des glissières, un premier frotteur solidaire de la lame basse (8) frottant sur l'un des éléments vibrants de manière à délivrer un premier signal (SLA), et un second frotteur solidaire d'une lame intermédiaire pénétrant dans les glissières et entrant en contact avec l'autre élément vibrant au moment où la lame basse (8) arrive dans une position intermédiaire et délivrant un second signal (SLB), et en ce que les moyens électroniques de commande comprennent un circuit de décodage (figure 14) à quatre sorties permettant de distinguer quatre états correspondant aux quatre combinaisons des états des sorties des capteurs.
- Fermeture selon la revendication 15 comprenant un moteur (25) à deux enroulements pour deux sens de rotation correspondant à la descente et à la montée du volet roulant et une commande pouvant délivrer un ordre de montée (SM = 1) ou un ordre de descente (SD = 1), caractérisée en ce que les moyens électroniques de commande comprennent en outre des moyens pour mémoriser l'état précédent des sorties du circuit de décodage, de manière à permettre de distinguer, en descente, entre un arrêt dû à un obstacle et un arrêt en position totalement fermée, lames empilées.
- Fermeture motorisée selon la revendication 5, comprenant un moteur (25) à deux enroulements pour l'entraînement du moyen de fermeture dans le sens de l'ouverture et de la fermeture, caractérisée en ce que les moyens de traitement du signal du capteur (7) comprennent un circuit (71, 72) délivrant une tension de référence, un circuit amplificateur (74, 75), un comparateur (76) comparant le signal amplifié à la tension de référence et dont la sortie qui peut prendre un état "haut" ou un état "bas", est appliquée à un monostable réarmable (77) dont la sortie Q* passe à l'état "bas" pendant une durée fixe (T) supérieure au temps maximum séparant deux impulsions lors du mouvement du frotteur sur l'élément vibrant et ne repasse à l'état "haut" que si les vibrations disparaissent pendant une durée supérieure à ladite durée fixe (T).
- Fermeture selon la revendication 17, caractérisée en ce que les moyens de traitement comprennent en outre deux bascules (78, 79) auxquels est appliquée la sortie Q* du monostable réarmable (77), l'une des bascules (78) étant reliée à un circuit (80, 82, 84) détectant un mouvement de montée (SM) et l'autre bascule (79) étant reliée à un circuit (81, 83, 84) détectant un mouvement de descente, pour enregistrer un défaut dans les bascules, par un état déterminé, c'est-à-dire si la vibration cesse alors que le moteur est activé en montée ou descente, lesdits circuits étant en outre agencés de manière à maintenir l'enregistrement du défaut aussi longtemps qu'un ordre de mouvement dans le sens opposé n'a pas été donné.
- Fermeture selon la revendication 18, caractérisée en ce que lesdits circuits (80, 82, 84 et 81, 83, 84) comprennent chacun un transistor (80, 81) dont les collecteurs sont respectivement reliés à l'entrée Data de chacune des bascules (78, 79) et dont les émetteurs sont respectivement reliés à deux bornes (DD, DM) d'un commutateur de commande (84) pour la commande de la montée et de la descente du volet, l'un ou l'autre des transistors étant conducteur en cas de commande de mouvement, un défaut enregistré dans l'une des bascules ayant pour effet de bloquer la conduction du transistor correspondant, cet état bloqué se maintenant aussi longtemps que l'autre transistor n'a pas été rendu conducteur par le changement d'état du commutateur, c'est-à-dire l'apparition d'un ordre de mouvement de sens opposé.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9206610 | 1992-06-01 | ||
| FR929206610A FR2691746B1 (fr) | 1992-06-01 | 1992-06-01 | Dispositif generateur de signaux caracteristiques du deplacement d'un moyen de fermeture. |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0573388A1 true EP0573388A1 (fr) | 1993-12-08 |
| EP0573388B1 EP0573388B1 (fr) | 1996-09-18 |
Family
ID=9430309
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP93810369A Expired - Lifetime EP0573388B1 (fr) | 1992-06-01 | 1993-05-19 | Dispositif générateur de signaux caractéristiques du déplacement d'un moyen de fermeture |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP0573388B1 (fr) |
| JP (1) | JPH0642278A (fr) |
| AT (1) | ATE143093T1 (fr) |
| DE (1) | DE69304799T2 (fr) |
| ES (1) | ES2048723T1 (fr) |
| FR (1) | FR2691746B1 (fr) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5699847A (en) * | 1995-06-21 | 1997-12-23 | Somfy | Motorized roll-up device for venetian blinds |
| WO1998046852A1 (fr) * | 1997-04-16 | 1998-10-22 | Nergeco | Porte de securite a panneau coulissant |
| FR2762354A1 (fr) * | 1997-04-16 | 1998-10-23 | Nergeco Sa | Dispositif de securite pour porte a panneau coulissant |
| FR2819545A1 (fr) * | 2001-01-18 | 2002-07-19 | Bubendorff Volet Roulant | Volet roulant pourvu d'un dispositif de detection d'obstacle |
| EP1245780A1 (fr) * | 2001-03-28 | 2002-10-02 | Bubendorff Volet Roulant Société Anonyme | Volet roulant pourvu de moyens aptes à détecter un choc |
| EP1245781A1 (fr) * | 2001-03-28 | 2002-10-02 | Bubendorff Volet Roulant Société Anonyme | Volet roulant motorisé à commande d'arrêt du moteur sur obstacle |
| EP0716214B1 (fr) * | 1994-11-14 | 2003-09-10 | elero GmbH | Procédé et dispositif pour contrôler l'arrêt d'un volet roulant ou similaire entraîné par un moteur électrique |
| EP1391028A1 (fr) * | 2001-05-03 | 2004-02-25 | Techniku, Inc. | Systeme de commande et de motorisation |
| ITRM20090288A1 (it) * | 2009-06-08 | 2010-12-09 | Lince Italia S P A | Dispositivo anti intrusione, in particolare per serrande avvolgibili |
| FR2955888A1 (fr) * | 2010-02-04 | 2011-08-05 | Somfy Sas | Outil de reglage de fin de course. |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2712348B1 (fr) * | 1993-11-12 | 1996-02-02 | Somfy | Dispositif générateur de signaux caractéristiques du déplacement d'un moyen de fermeture. |
| FR2827413B1 (fr) | 2001-07-11 | 2004-01-09 | Somfy | Fermeture centralisee de securite |
| FR2896580B1 (fr) | 2006-01-23 | 2008-04-18 | Somfy Sas | Procede de mesure du deplacement d'un volet roulant et procedes de configuration et de commande utilisant le procede de mesure. |
| DE102017108757A1 (de) * | 2017-04-25 | 2017-11-23 | Meißner GmbH Toranlagen | Rollgitter-Toranlage |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3806733A1 (de) * | 1988-03-02 | 1989-09-14 | Elero Antrieb Sonnenschutz | Anordnung zur ueberwachung und steuerung von rollaeden und dergleichen |
| FR2657646A1 (fr) * | 1990-01-26 | 1991-08-02 | Somfy | Dispositif de securite pour volet roulant motorise. |
-
1992
- 1992-06-01 FR FR929206610A patent/FR2691746B1/fr not_active Expired - Fee Related
-
1993
- 1993-05-19 EP EP93810369A patent/EP0573388B1/fr not_active Expired - Lifetime
- 1993-05-19 ES ES93810369T patent/ES2048723T1/es active Pending
- 1993-05-19 AT AT93810369T patent/ATE143093T1/de not_active IP Right Cessation
- 1993-05-19 DE DE69304799T patent/DE69304799T2/de not_active Expired - Fee Related
- 1993-05-31 JP JP5128634A patent/JPH0642278A/ja not_active Withdrawn
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3806733A1 (de) * | 1988-03-02 | 1989-09-14 | Elero Antrieb Sonnenschutz | Anordnung zur ueberwachung und steuerung von rollaeden und dergleichen |
| FR2657646A1 (fr) * | 1990-01-26 | 1991-08-02 | Somfy | Dispositif de securite pour volet roulant motorise. |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0716214B1 (fr) * | 1994-11-14 | 2003-09-10 | elero GmbH | Procédé et dispositif pour contrôler l'arrêt d'un volet roulant ou similaire entraîné par un moteur électrique |
| US5699847A (en) * | 1995-06-21 | 1997-12-23 | Somfy | Motorized roll-up device for venetian blinds |
| WO1998046852A1 (fr) * | 1997-04-16 | 1998-10-22 | Nergeco | Porte de securite a panneau coulissant |
| FR2762354A1 (fr) * | 1997-04-16 | 1998-10-23 | Nergeco Sa | Dispositif de securite pour porte a panneau coulissant |
| FR2819545A1 (fr) * | 2001-01-18 | 2002-07-19 | Bubendorff Volet Roulant | Volet roulant pourvu d'un dispositif de detection d'obstacle |
| EP1245780A1 (fr) * | 2001-03-28 | 2002-10-02 | Bubendorff Volet Roulant Société Anonyme | Volet roulant pourvu de moyens aptes à détecter un choc |
| FR2822885A1 (fr) * | 2001-03-28 | 2002-10-04 | Bubendorff Volet Roulant | Volet roulant pourvu de moyens aptes a detecter un choc |
| FR2822887A1 (fr) * | 2001-03-28 | 2002-10-04 | Bubendorff Volet Roulant | Volet roulant motorise a commande d'arret du moteur sur obstacle |
| EP1245781A1 (fr) * | 2001-03-28 | 2002-10-02 | Bubendorff Volet Roulant Société Anonyme | Volet roulant motorisé à commande d'arrêt du moteur sur obstacle |
| EP1818498A2 (fr) * | 2001-03-28 | 2007-08-15 | Bubendorff Volet Roulant Société Anonyme | Volet roulant motorisé à commande d'arrêt du moteur sur obstacle |
| EP1818497A2 (fr) * | 2001-03-28 | 2007-08-15 | Bubendorff Volet Roulant Société Anonyme | Volet roulant motorise a commande d'arret du moteur sur obstacle |
| EP1818498A3 (fr) * | 2001-03-28 | 2007-10-10 | Bubendorff Volet Roulant Société Anonyme | Volet roulant motorisé à commande d'arrêt du moteur sur obstacle |
| EP1818497A3 (fr) * | 2001-03-28 | 2007-10-10 | Bubendorff Volet Roulant Société Anonyme | Volet roulant motorise a commande d'arret du moteur sur obstacle |
| EP1391028A1 (fr) * | 2001-05-03 | 2004-02-25 | Techniku, Inc. | Systeme de commande et de motorisation |
| EP1391028A4 (fr) * | 2001-05-03 | 2004-12-01 | Techniku Inc | Systeme de commande et de motorisation |
| ITRM20090288A1 (it) * | 2009-06-08 | 2010-12-09 | Lince Italia S P A | Dispositivo anti intrusione, in particolare per serrande avvolgibili |
| FR2955888A1 (fr) * | 2010-02-04 | 2011-08-05 | Somfy Sas | Outil de reglage de fin de course. |
| EP2354423A1 (fr) * | 2010-02-04 | 2011-08-10 | Somfy SAS | Outil de réglage de fin de course |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2691746B1 (fr) | 1994-08-05 |
| DE69304799D1 (de) | 1996-10-24 |
| ATE143093T1 (de) | 1996-10-15 |
| FR2691746A1 (fr) | 1993-12-03 |
| ES2048723T1 (es) | 1994-04-01 |
| DE69304799T2 (de) | 1997-04-03 |
| EP0573388B1 (fr) | 1996-09-18 |
| JPH0642278A (ja) | 1994-02-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0573388B1 (fr) | Dispositif générateur de signaux caractéristiques du déplacement d'un moyen de fermeture | |
| EP0439422B1 (fr) | Dispositif de sécurité pour volet roulant motorisé | |
| EP0833435A1 (fr) | Dispositif de commande pour moteur asynchrone de store ou volet roulant | |
| EP0784146B1 (fr) | Installation de fermeture ou de protection solaire motorisée | |
| EP2216478B1 (fr) | Système de détection d'obstacle entre un seuil d'une ouverture de bâtiment et une extrémité d'un écran motorisé | |
| FR2680437A1 (fr) | Montage pour surveiller des elements de fermeture entraines par un moteur electrique. | |
| FR1465742A (fr) | Appareil électrique servant à lever et à abaisser un volet roulant, tel une jalousie | |
| FR2550775A1 (fr) | Systeme d'ascenseur | |
| EP0966085A1 (fr) | Dispositif de commande de l'arrêt d'un produit d'occultation motorisé | |
| FR3106781A1 (fr) | Dispositif d’actionnement destiné à l’ouverture et à la fermeture assistée d’un ouvrant de véhicule | |
| FR3069008A1 (fr) | Fenetre coulissante pour un batiment et installation domotique comprenant une telle fenetre coulissante, ainsi que procede de commande associe | |
| EP0552338B1 (fr) | Systeme de protection pour portes automatiques | |
| FR2602894A1 (fr) | Systeme de comptage de mobiles traversant dans les deux sens une voie unique, a l'aide de cellules photoelectriques de detection directe | |
| EP0819204A1 (fr) | Porte de manutention avec systeme de securite | |
| FR2494451A1 (fr) | Capteur opto-electronique de forte intensite ayant une faible consommation de courant | |
| EP0678643B1 (fr) | Dispositif de commande de lève-vitres pour véhicule, utilisant un nombre réduit de fils de connexion et intégrant la fonction d'antipincement | |
| FR2657646A1 (fr) | Dispositif de securite pour volet roulant motorise. | |
| WO2022090174A1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'occultation et dispositif d'occultation associé | |
| FR3078357A1 (fr) | Procede de commande en fonctionnement d'un dispositif d'entrainement motorise d'une fenetre pour un batiment, fenetre et installation domotique associes | |
| EP0502773A2 (fr) | Dispositif de contrôle de moteur, notamment pour l'entraînement de portes d'ascenseur | |
| EP3805503A1 (fr) | Procédé de commande en fonctionnement d'un dispositif d'entraînement motorisé d'une fenêtre coulissante pour un bâtiment, fenêtre et installation domotique associées | |
| EP3312689B1 (fr) | Procédé de commande en fonctionnement d'une installation domotique et installation domotique associée | |
| WO2000037292A1 (fr) | Procede de commande de nettoyage d'une surface de plaque par controle optique dynamique, et equipement de mise en oeuvre | |
| FR2918772A1 (fr) | Procede de fonctionnement d'une installation domotique dont la position d'un element mobile est definie par une donnee temporelle et installation domotique pour sa mise en oeuvre. | |
| EP0533625B1 (fr) | Dispositif de sécurité pour porte ou volet roulant |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH DE ES GB IT LI NL SE |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: BA2A Ref document number: 2048723 Country of ref document: ES Kind code of ref document: T1 |
|
| 17P | Request for examination filed |
Effective date: 19940310 |
|
| 17Q | First examination report despatched |
Effective date: 19951114 |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE ES GB IT LI NL SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19960918 Ref country code: GB Effective date: 19960918 Ref country code: AT Effective date: 19960918 |
|
| REF | Corresponds to: |
Ref document number: 143093 Country of ref document: AT Date of ref document: 19961015 Kind code of ref document: T |
|
| REF | Corresponds to: |
Ref document number: 69304799 Country of ref document: DE Date of ref document: 19961024 |
|
| ITF | It: translation for a ep patent filed |
Owner name: BUGNION S.P.A. |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19961218 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19961229 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| GBV | Gb: ep patent (uk) treated as always having been void in accordance with gb section 77(7)/1977 [no translation filed] |
Effective date: 19960918 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19970531 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19970531 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 19970711 Year of fee payment: 5 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19980326 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980531 |
|
| BERE | Be: lapsed |
Owner name: SOMFY Effective date: 19980531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20000301 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050519 |