EP0504867A1 - Computer controlled system for lifting loads with at least two hoists - Google Patents
Computer controlled system for lifting loads with at least two hoists Download PDFInfo
- Publication number
- EP0504867A1 EP0504867A1 EP92104771A EP92104771A EP0504867A1 EP 0504867 A1 EP0504867 A1 EP 0504867A1 EP 92104771 A EP92104771 A EP 92104771A EP 92104771 A EP92104771 A EP 92104771A EP 0504867 A1 EP0504867 A1 EP 0504867A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- hoists
- hoist system
- control computer
- computer
- hoist
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63J—DEVICES FOR THEATRES, CIRCUSES, OR THE LIKE; CONJURING APPLIANCES OR THE LIKE
- A63J1/00—Stage arrangements
- A63J1/02—Scenery; Curtains; Other decorations; Means for moving same
- A63J1/028—Means for moving hanging scenery
Definitions
- the invention relates to a computer-controlled hoist system with at least two hoists, which is particularly suitable for stages and multi-purpose halls.
- hoist systems are mainly used in studios, stages, discotheques, in shows and other events.
- Lifting hoists are to be understood as supporting means that can move loads.
- Hoists consist of a drive and the associated supporting structure, e.g. Chain hoists and wire rope hoists.
- the hoist system is intended, for example, to raise an "artificial" lace-up floor, described below, and the PA and lighting systems attached to it.
- the "artificial" lace-up method is made possible by the fact that several hoists are grouped together.
- each drive is assigned an autonomous computer. All drive computers are connected to a common bus together with a common switching computer. An operating computer is assigned to an operating terminal and is connected to the switching computer. Position data of their respective drive are fed to the drive computers via actual value transmitters; depending on commands from the switching computer, they control and monitor their drive, including the calculation and regulation of speeds, and provide position data and error messages to the switching computer.
- the operating computer monitors and manages command buttons, switches and displays on the operator terminal, interprets group combinations of drives, stores data chains for specified movement sequences and transmits travel commands to the switching computer.
- the switching computer monitors the data traffic from and to the operator computer, as well as from and to the drives or drive computers, it keeps lists with actual values of all drives and permanent error states, continuously checks the data paths to all other computers and carries out the necessary switching measures in the event of an error.
- the drive computers continuously calculate the target position of your drive by evaluating direction, speed and group composition commands and initiate the necessary corrections in the event of deviations between the actual and target positions.
- the drives are switched off when deviations between the actual and target positions are found that exceed a specified maximum value.
- the drive computer carries out a safety check for the drives and itself, in particular tracking error and slack rope monitoring, as well as monitoring of pre-and emergency limit switches.
- the switching computer is connected to the operating computer via a serial interface and a serial reserve interface, as well as associated lines, and it automatically switches over to the reserve interface in the event of data traffic disruptions.
- the position data of the actual value transmitters are fed to the switching computer.
- grouping drives it checks the synchronism of the drives within the groups independently of the drive computers of the groups by comparing the position data.
- the control panel has one or more master switches that enable the group travel speed and direction to be set for group combinations of drives via the operating computer.
- Weight detection is not carried out in the prior art, which represents a security risk. If a weight is attached to the drives which is greater than the maximum permissible load at the suspension point of the respective drive, there is a risk of the roof structure collapsing. A shift in weight within a group, for example due to slipping of the attached construction or due to the failure of a hoist, can also lead to an impermissible load on the roof structure. If, for example, a truss construction is brought to the desired height by several drives at the same time, this also involves dangers.
- Under truss constructions are e.g. Understand wood, steel or aluminum truss constructions. By combining several trusses, an “artificial" lace is formed. On this "artificial" lacing floor e.g. Lighting and sound systems attached. If the weight of the attached load is too high, the truss construction can break, or there is a risk that the maximum load on the suspension points will be exceeded. Since there are no weight recording devices at event venues, an estimate of the loads to be suspended in the roof structure is necessary, which is not a reproducible method on the one hand and leads to errors on the other.
- the usual computers are single-channel.
- a single-channel switching computer runs the risk that system errors that occur will not be recognized because there is no comparison of the process data.
- the switching computer is equipped with the operating computer through a two-channel data line, but if the operating computer fails, the control panel can no longer be used. If the operating computer fails, no load could then be moved out of the danger area. This danger is further increased by the possibility of operating errors due to a very large number of control buttons - according to DE-A-32 33 468, about 300 buttons, 250 light-emitting diodes and 100 digit display decades are necessary.
- the invention has for its object to provide a computer-controlled hoist system of the type mentioned, which meets the above-mentioned safety requirements and in particular avoids overloading the roof structure, the truss structure or individual hoists. This is to avoid endangering personnel, artists and the public. Furthermore, such a hoist system to relieve the personnel should be easy and clear to operate.
- the hoist system according to the invention is based on a multi-channel, in particular two-channel control computer, that is to say a control computer with two or more programmable logic controllers ("PLC”), which is connected to the hoist trains, the operating terminal and the operating computer via a coaxial ring network.
- PLC programmable logic controller
- the control system is designed redundantly; Further control of the system is guaranteed even if one channel fails.
- one channel is monitored by the other. If deviations between the channels are found that exceed a specified tolerance range, the system is shut down or other specified measures are initiated.
- the mutual monitoring of the two channels takes into account any time shifts that occur in the parallel arithmetic operations by specifying a time interval within which there must be agreement.
- the operator computer is assigned to the operator terminal, but the operator terminal can be used independently of the operator computer. This is particularly necessary when individual hoists still have to be operated. In the case of group connections of the drives, however, the use of the operating computer is preferable. Accordingly, the hoist system according to the invention allows both individual trips and group switching of the respective drives.
- the control computer is informed of the respective position of the drives via actual value transmitters, and likewise, preferably via strain gauges known per se, the respective load of the individual hoist trains. All the hoists in motion in a group are checked for synchronism, load and height position, all motors that are at a standstill are checked for standstill and load. When the individual trains move, the height position and load are checked.
- control computer preferably maintains lists with the maximum permissible loads of the suspension points, the exceeding of which stops the entire system and, if necessary, predetermined, safety-related measures are carried out, for example relieving the suspension points by returning to a starting position. Error messages are forwarded to the operator computer and displayed on it.
- the control computer also continuously checks the data traffic in the coaxial ring network and, in the event of malfunctions, carries out the specified, safety-related measures, such as decommissioning the hoist trains or returning to a specified or starting position.
- the control computer monitors and manages the command buttons, switches and displays of the operator terminal, interprets group combinations of the individual hoists and stores data chains for specified movement sequences.
- the control computer releases the travel commands when it has checked all the processes.
- the hoist system has a permanently installed height measuring system which is used to compare the actual / setpoint of the Tax calculator is involved. During group journeys, the individual hoists are monitored for compliance with the permissible height deviation within the group in order not to destroy suspended truss constructions and to avoid weight shifts within a group of hoists and the resulting overloading.
- a weight detection by means of load measuring devices preferably arranged on the individual drives makes it possible to recognize load shifts within a group and to stop the drives when the permissible tolerance is exceeded and, if necessary, to take further measures.
- a slack chain shutdown must be carried out when the hoist is not under load so that dangers to people are avoided. If an unloaded hoist hits an obstacle, the hook block stops at this point and the chain continues to descend (slack chain formation).
- a slack chain shutdown on loaded hoists that are moved in a group can avoid the following problems. If the group consists of, for example, four drives and when hitting an obstacle if three hoists are relieved, there is a risk of overloading the fourth hoist. A punctiform load arises which contains a risk of overloading the drive, the traction means (breakage of the chain or the rope) or the permissible ceiling load at this suspension point can be exceeded. The same point overload can occur if three hoists of the group described above fail at the same time.
- All safety-relevant data is stored independent of the network, preferably in a battery-buffered RAM of the control computer.
- all the data that has occurred during operation is also stored within the control computer in order to obtain and be able to retrieve and reproduce a reproducible event log and to document operating errors that occur.
- the drive is monitored for synchronism by the installed height measuring device, for example using an incremental encoder.
- the control computer calculates the data for the lead train and then compares it with the real measured data.
- further measures to increase security are possible.
- a preferred option is to record the position and weight multiple times. Both channels of the control computer compare the measured values with each other and initiate the safety-related measures in the event of deviations. If the position and the weight of at least some of the hoists are recorded twice, each is expediently of the two parallel data records from one channel each.
- group formation rules can be defined, e.g. prevent loaded drives from being deleted from a group before they have been relieved, and to prevent double assignment in two different groups.
- the control enables opposite movements, and if different distances are specified, the control computer calculates the necessary speed of all trains so that all trains arrive at their destination at the same time. Time-shifted movements, movements in the form of waves, rocking movements and movements in tilting sequences are also possible.
- a logon procedure can be installed on the operating computer, which must first be carried out before the system releases the system.
- All data that is saved can be it security-related or event-related data, can be saved on disk as well as on disk. This data can also be printed out using a log printer.
- the operating computer can be divided into further sub-control panels, which can then be brought into areas in which complicated movements are carried out. Only drives that were previously approved by the operator computer can be selected on the sub-control panels.
- the operating computer coordinates the various sub-control panels and gives them Data from all sub-control panels to the control computer. However, a version is also possible in which all control panels communicate directly with the control computer.
- the hoists can either be installed stationary or movable.
- control can also be used for all other drive types, e.g. hydraulic drives that lift platforms and platforms.
- the two-channel control computer (1) has access to the operator terminal via the coaxial ring network (2) (5), the operating computer (6) and the individual drives (4a, 4b, 4c, 4d, ... 4n).
- Fig. 2 shows the two-channel structure of the control computer, in which each of the channels (1 and 2) has independent access to the data and to the ring network. All data from the drives to the control computer are read from both channels of the control computer and a comparison between the channels takes place. This measure above all prevents multiple errors and prevents misinformation from interfering with the operational process. If the comparison leads to different values, the system is shut down or other, predetermined measures are initiated.
- the clock of the system is specified by a defined time window, which also regulates the timing of the channels.
- the weight is recorded, for example, via strain gauges (DMS), which transmit the recorded values to the channels of the control computer via load-frequency converters (LSW) and frequency-voltage converters (FSW).
- DMS strain gauges
- LSW load-frequency converters
- FSW frequency-voltage converters
- FIG. 5 shows the coaxial ring network with a main loop and a sub loop. For example, If the main loop to the channel (1) fails, the sub loop is immediately switched to.
- a possible application example is the positioning of lighting and sound systems above the Stage at music events.
- the "artificial" lace-up floor is moved to the working height with the hoists.
- music boxes are moved onto the stage, which can now be attached to any point on the "artificial" lacing floor, if the maximum permissible load in the suspension points is not exceeded.
- hoist control Another application of the hoist control is the "tracking system” described below, which has hoists that move a frame in the vertical direction. At the same time, this tracking system, e.g. B. on a rail system, movable in the horizontal direction.
- this tracking system e.g. B. on a rail system, movable in the horizontal direction.
- the overall system can be implemented as shown in FIG. 6.
- a traverse structure 10 is moved in height.
- a rail system 11, on which a frame 12 is moved, is mounted on the truss construction 10.
- There are drives on the frame 12 which can move or tilt a second frame 13.
- a drive is also provided for the horizontal movement of the frame 12.
- All of these drives can be moved using the control described at the beginning. Single and group trips are possible.
- the driving levers are located on the central control panel or a secondary panel, which enables all functions of the tracking system.
- the driving levers increase the speed proportionally to the lever design. This means that the speed is infinitely adjustable.
- the maximum speed of the individual drives is preferably limited by the control. With the help of the drive levers movement sequences can be followed in the teach-in process and saved afterwards. Individual movement sequences, also called “cue's”, can then be linked to form more complex movement sequences. Movements assembled in this way can then be called up again automatically.
- the driving data can also be entered using the keyboard.
- monitors can be mounted on the control panel.
- a variant is, for example, that the current driving data, the start and end positions are displayed on a monitor of the control panel.
- a floor plan of the local conditions is shown on a second monitor and the movements of the drives are shown to scale. It can be conveniently switched between different views (side view, top view, etc.).
- Predefined safety areas can prevent hazardous areas from being approached.
- the user interface on the monitor naturally offers further display options, which are not listed here.
- the tracking system contains in particular is the possibility of moving a scanner head of a laser system via the movable frame.
- a fiber optic cable makes it possible for the scanner head of the laser to move in space, thereby producing laser effects in three-dimensional space.
- a combination of the tracking system with the laser opens up new, varied show and lighting effects in an unprecedented way.
Landscapes
- Control And Safety Of Cranes (AREA)
- Selective Calling Equipment (AREA)
Abstract
Description
Die Erfindung betrifft ein rechnergesteuertes Hubzugsystem mit wenigstens zwei Hubzügen, das insbesondere für Bühnen und Mehrzweckhallen geeignet ist. Solche Hubzugsysteme kommen vor allem in Studios, Bühnen, Diskotheken, in Shows und sonstigen Veranstaltungen zum Einsatz.The invention relates to a computer-controlled hoist system with at least two hoists, which is particularly suitable for stages and multi-purpose halls. Such hoist systems are mainly used in studios, stages, discotheques, in shows and other events.
Unter Hubzügen sind Tragmittel zu verstehen, die Lasten verfahren können. Hubzüge bestehen aus einem Antrieb und dem dazugehörigen Tragwerk, wie z.B. Kettenzüge und Seilzüge. Mit dem Hubzugsystem sollen beispielsweise ein unten näher beschriebener "künstlicher" Schnürboden und daran befestigte Beschallungs- und Beleuchtungsanlagen in die Höhe gefahren werden. Das Verfahren des "künstlichen" Schnürbodens wird dadurch ermöglicht, daß mehrere Hubzüge zu einer Gruppe zusammengefaßt sind.Lifting hoists are to be understood as supporting means that can move loads. Hoists consist of a drive and the associated supporting structure, e.g. Chain hoists and wire rope hoists. The hoist system is intended, for example, to raise an "artificial" lace-up floor, described below, and the PA and lighting systems attached to it. The "artificial" lace-up method is made possible by the fact that several hoists are grouped together.
Ein sicheres Verriegeln der Anlage muß gewährleistet werden, da sich der "künstliche" Schnürboden (mit mehreren Tonnen Gewicht) über einem Publikum befinden kann.A secure locking of the system must be ensured, since the "artificial" lacing floor (weighing several tons) can be above an audience.
Aus der DE-A-32 33 468 ist eine Steuerung für eine Schnürbodenmaschinerie bekannt, bei dem jedem Antrieb ein autonomer Rechner zugeordnet ist. Alle Antriebsrechner sind zusammen mit einem gemeinsamen Vermittlungsrechner an eine gemeinsame Sammelleitung angeschlossen. Einem Bedienterminal ist ein Bedienrechner zugeordnet, der mit dem Vermittlungsrechner in Verbindung steht. Den Antriebsrechnern werden über Istwertgeber Positionsdaten ihres jeweiligen Antriebes zugeführt; sie steuern und überwachen abhängig von Befehlen des Vermittlungsrechners ihren Antrieb einschließlich der Errechnung und Regelung von Geschwindigkeiten und geben Positionsdaten und Fehlermeldungen zum Vermittlungsrechner. Der Bedienrechner überwacht und verwaltet Befehlstasten, Schalter und Anzeigen des Bedienterminals, intepretiert Gruppenzusammenstellungen von Antrieben, speichert Datenketten für vorgegebene Bewegungsabläufe und übermittelt Fahrbefehle an den Vermittlungsrechner. Der Vermittlungsrechner überwacht den Datenverkehr von und zum Bedienrechner, sowie von und zu den Antrieben bzw. Antriebsrechnern, er führt Listen mit Istwerten aller Antriebe und über andauernde Fehlerzustände, überprüft dauernd die Datenwege zu allen übrigen Rechnern und führt im Fehlerfall die erforderlichen Schaltmaßnahmen durch. Die Antriebsrechner errechnen laufend unter Auswertung von Fahrtrichtungs-, Geschwindigkeits- und Gruppenzusammenstellungsbefehlen die Sollage ihres Antriebes und veranlassen bei Abweichungen zwischen Ist- und Sollage die notwendigen Korrekturen.From DE-A-32 33 468 a control for a lace-up machinery is known in which each drive is assigned an autonomous computer. All drive computers are connected to a common bus together with a common switching computer. An operating computer is assigned to an operating terminal and is connected to the switching computer. Position data of their respective drive are fed to the drive computers via actual value transmitters; depending on commands from the switching computer, they control and monitor their drive, including the calculation and regulation of speeds, and provide position data and error messages to the switching computer. The operating computer monitors and manages command buttons, switches and displays on the operator terminal, interprets group combinations of drives, stores data chains for specified movement sequences and transmits travel commands to the switching computer. The switching computer monitors the data traffic from and to the operator computer, as well as from and to the drives or drive computers, it keeps lists with actual values of all drives and permanent error states, continuously checks the data paths to all other computers and carries out the necessary switching measures in the event of an error. The drive computers continuously calculate the target position of your drive by evaluating direction, speed and group composition commands and initiate the necessary corrections in the event of deviations between the actual and target positions.
Bei Feststellung von Abweichungen zwischen Ist- und Sollage, die einen vorgegebenen Maximalwert überschreiten, werden die Antriebe abgeschaltet.The drives are switched off when deviations between the actual and target positions are found that exceed a specified maximum value.
Der Antriebsrechner führt eine Sicherheitsüberprüfung für die Antriebe und sich selbst durch, insbesondere eine Schleppfehler- und Schlaffseilüberwachung, sowie eine Überwachung von Vor- und Notendschaltern.The drive computer carries out a safety check for the drives and itself, in particular tracking error and slack rope monitoring, as well as monitoring of pre-and emergency limit switches.
Der Vermittlungsrechner ist über eine serielle Schnittstelle und eine serielle Reserve-Schnittstelle, sowie zugehörige Leitungen mit dem Bedienrechner verbunden, und bei Störungen des Datenverkehrs schaltet er automatisch auf die Reserveschnittstelle um.The switching computer is connected to the operating computer via a serial interface and a serial reserve interface, as well as associated lines, and it automatically switches over to the reserve interface in the event of data traffic disruptions.
Dem Vermittlungsrechner werden die Positionsdaten der Istwertgeber zugeführt, er prüft bei Gruppenzusammenstellungen von Antrieben, unabhängig von den Antriebsrechnern der Gruppen, den Synchronismus der Antriebe innerhalb der Gruppen durch Vergleichen der Positionsdaten.The position data of the actual value transmitters are fed to the switching computer. When grouping drives, it checks the synchronism of the drives within the groups independently of the drive computers of the groups by comparing the position data.
Das Bedienpult weist einen oder mehrere Meisterschalter auf, die für Gruppenzusammenstellungen von Antrieben über den Bedienrechner eine Einstellung der Gruppenfahrgeschwindigkeit und -richtung ermöglichen.The control panel has one or more master switches that enable the group travel speed and direction to be set for group combinations of drives via the operating computer.
Diese bekannte Steuerung hat eine Reihe von sicherheitstechnischen Nachteilen. So entspricht es nicht den Vorschriften der Unfallverhütungsvorschrift Bühnen und Studios (VGB 70) der Verwaltungs- und Berufsgenossenschaften. Zudem erfüllen diese Steuerungen nicht die Sicherheitsanforderungen nach DIN V 19250 01/89 und VDE 0801 10/90 Grundlegende Sicherheitsbetrachtungen für MSR-Schutzeinrichtungen.This known control system has a number of safety-related disadvantages. So it does not comply with the regulations of the accident prevention regulation for stages and studios (VGB 70) of the administrative and professional associations. In addition, these controls do not meet the safety requirements according to DIN V 19250 01/89 and VDE 0801 10/90 Basic safety considerations for MSR protective devices.
Eine Gewichtserfassung wird im Stand der Technik nicht vorgenommen, was ein Sicherheitsrisiko darstellt. Wird an die Antriebe ein Gewicht gehängt, welches größer als die maximal zulässige Belastung im Aufhängepunkt des jeweiligen Antriebes ist, dann besteht die Gefahr des Einstürzens der Dachkonstruktion. Eine Gewichtsverlagerung innerhalb einer Gruppe, etwa durch Verrutschen der angehängten Konstruktion oder durch Ausfall eines Hubzuges, kann ebenfalls zu einer unzulässigen Belastung der Dachkonstruktion führen. Wird z.B. eine Traversenkonstruktion durch mehrere Antriebe gleichzeitig auf eine gewünschte Höhe gebracht, birgt dies ebenfalls Gefahren in sich.Weight detection is not carried out in the prior art, which represents a security risk. If a weight is attached to the drives which is greater than the maximum permissible load at the suspension point of the respective drive, there is a risk of the roof structure collapsing. A shift in weight within a group, for example due to slipping of the attached construction or due to the failure of a hoist, can also lead to an impermissible load on the roof structure. If, for example, a truss construction is brought to the desired height by several drives at the same time, this also involves dangers.
Unter Traversenkonstruktionen sind z.B. Holz-, Stahl- oder Aluminiumbinderkonstruktionen zu verstehen. Durch Kombination mehrerer Traversen wird ein "künstlicher" Schnürboden gebildet. An diesem "künstlichen" Schnürboden werden dann z.B. Beleuchtungs- und Beschallungsanlagen befestigt. Ist das Gewicht der angehängten Last zu hoch, kann erstens die Traversenkonstruktion brechen, oder es besteht Gefahr, daß die maximale Belastung der Aufhängepunkte überschritten wird. Da an Veranstaltungsstätten regelmäßig keine Gewichtserfassungseinrichtungen vorhanden sind, ist eine Abschätzung der in die Dachkonstruktion zu hängenden Lasten notwendig, was zum einen keine reproduzierbare Methode ist, zum anderen zu Fehlern führt.Under truss constructions are e.g. Understand wood, steel or aluminum truss constructions. By combining several trusses, an "artificial" lace is formed. On this "artificial" lacing floor e.g. Lighting and sound systems attached. If the weight of the attached load is too high, the truss construction can break, or there is a risk that the maximum load on the suspension points will be exceeded. Since there are no weight recording devices at event venues, an estimate of the loads to be suspended in the roof structure is necessary, which is not a reproducible method on the one hand and leads to errors on the other.
Ferner sind die üblichen Rechner einkanalig ausgeführt. Ein einkanalig ausgeführter Vermittlungsrechner birgt die Gefahr in sich, daß auftretende Systemfehler nicht erkannt werden, da kein Vergleich der Prozeßdaten stattfindet. Der Vermittlungsrechner ist zwar durch eine zweikanalige Datenleitung mit dem Bedienrechner ausgestattet, aber bei Ausfall des Bedienrechners kann mit dem Bedienpult nicht mehr gearbeietet werden. Bei Ausfall des Bedienrechners könnte dann keine Last mehr aus dem Gefahrenbereich verfahren werden. Diese Gefahr wird noch durch die Möglichkeit von Bedienungsfehlern durch eine sehr große Anzahl an Bedientasten - gemäß DE-A-32 33 468 sind etwa 300 Tasten, 250 Leuchtdioden und 100 Ziffernanzeigedekaden notwendig - erhöht.Furthermore, the usual computers are single-channel. A single-channel switching computer runs the risk that system errors that occur will not be recognized because there is no comparison of the process data. The switching computer is equipped with the operating computer through a two-channel data line, but if the operating computer fails, the control panel can no longer be used. If the operating computer fails, no load could then be moved out of the danger area. This danger is further increased by the possibility of operating errors due to a very large number of control buttons - according to DE-A-32 33 468, about 300 buttons, 250 light-emitting diodes and 100 digit display decades are necessary.
Der Erfindung liegt die Aufgabe zugrunde, ein rechnergesteuertes Hubzugsystem der eingangs genannten Art bereitzustellen, das die obengenannten Sicherheitsanforderungen erfüllt und insbesondere eine Überlastung der Dachkonstruktion, der Traversenkonstruktion oder einzelner Hubzüge vermeidet. Hierdurch soll eine Gefährdung von Personal, Künstlern und Publikum verhindert werden. Des weiteren soll ein solches Hubzugsystem zur Entlastung des Personals einfach und übersichtlich zu bedienen sein.The invention has for its object to provide a computer-controlled hoist system of the type mentioned, which meets the above-mentioned safety requirements and in particular avoids overloading the roof structure, the truss structure or individual hoists. This is to avoid endangering personnel, artists and the public. Furthermore, such a hoist system to relieve the personnel should be easy and clear to operate.
Diese Aufgabe wird mit einem rechnergesteuerten Hubzugsystem mit
- wenigstens zwei unabhängig steuerbaren Hubzügen,
- einem Steuerrechner zur Überwachung des Systems und Steuerung der einzelnen Hubzüge, der einen Ist/Sollwert-Vergleich durchführt,
- einem Bedienterminal,
- einem Bedienrechner zur Verwaltung des Bedienterminals und Übermittlung von Fahrbefehlen an den Steuerrechner,
- einem Ringnetz zur Verbindung von Steuerrechner, Bedienrechner, Bedienterminal und der einzelnen Hubzüge, wobei
das Netz ein Ringnetz ist und
der Steuerrechner eine Mehrkanalstruktur mit wenigstens zwei Kanälen besitzt, der in jedem Kanal unabhängig den Ist/Sollwert-Vergleich vornimmt sowie wechselseitig eine Überwachung jedes Kanals durch die jeweils anderen und bei Feststellung von Abweichungen das Hubzugsystem über wenigstens zweikanalig ausgeführte Abschaltleitungen stillegt, wobei im Rahmen des Ist/Sollwert-Vergleichs wenigstens eine Erfassung der Position und des Bewegungszustandes der einzelnen Hubzüge, eine Gewichtserfassung, eine Schlaffkettenüberwachung und eine Gleichlaufüberwachung von in Gruppe geschalteten Hubzügen vorgenommen wird,
- at least two independently controllable hoists,
- a control computer for monitoring the system and controlling the individual hoists, which carries out an actual / setpoint comparison,
- an operator terminal,
- an operating computer for administration of the operating terminal and transmission of driving commands to the control computer,
- a ring network for connecting the control computer, control computer, control terminal and the individual hoists, whereby
the network is a ring network and
the control computer has a multi-channel structure with at least two channels, which independently performs the actual / setpoint value comparison in each channel and mutually monitors each channel by means of the other and, if deviations are determined, shuts down the hoist system via at least two-channel shutdown lines, whereby within the actual / target value comparison at least detects the position and the state of movement of the individual hoists, weight detection, slack chain monitoring and synchronism monitoring of hoists connected in a group,
Das erfindungsgemäße Hubzugsystem basiert auf einem mehr-, insbesondere zweikanaligen Steuerrechner, also einem Steuerrechner mit zwei oder mehr speicherprogrammierbaren Steuerungen ("SPS"), der über ein koaxiales Ringnetz mit den Hubzügen, dem Bedienterminal und dem Bedienrechner verbunden ist. Bei zweikanaliger Struktur ist das Steuersystem redundant ausgebildet; auch bei Ausfall eines Kanals ist die weitere Steuerung des Systems gewährleistet. Zugleich findet eine Überwachung eines Kanals durch den jeweils anderen statt. Werden Abweichungen zwischen den Kanälen festgestellt, die einen vorgegebenen Toleranzbereich überschreiten, wird das System stillgesetzt bzw. werden andere vorgegebene Maßnahmen eingeleitet. Die gegenseitige Überwachung der beiden Kanäle berücksichtigt etwa auftretende zeitliche Verschiebungen bei den parallelen Rechenoperationen mittels Vorgabe eines Zeitintervalls, innerhalb dessen Übereinstimmung gegeben sein muß.The hoist system according to the invention is based on a multi-channel, in particular two-channel control computer, that is to say a control computer with two or more programmable logic controllers ("PLC"), which is connected to the hoist trains, the operating terminal and the operating computer via a coaxial ring network. With a two-channel structure, the control system is designed redundantly; Further control of the system is guaranteed even if one channel fails. At the same time, one channel is monitored by the other. If deviations between the channels are found that exceed a specified tolerance range, the system is shut down or other specified measures are initiated. The mutual monitoring of the two channels takes into account any time shifts that occur in the parallel arithmetic operations by specifying a time interval within which there must be agreement.
Dem Bedienterminal ist der Bedienrechner zugeordnet, wobei aber das Bedienterminal unabhängig vom Bedienrechner benutzt werden kann. Dies ist insbesondere dann erforderlich, wenn noch einzelne Hubzüge bedient werden müssen. Bei Gruppenschaltungen der Antriebe ist dagegen die Nutzung des Bedienrechners vorzuziehen. Entsprechend erlaubt das erfindungsgemäße Hubzugsystem sowohl Einzelfahrten als auch Gruppenschaltungen der jeweiligen Antriebe.The operator computer is assigned to the operator terminal, but the operator terminal can be used independently of the operator computer. This is particularly necessary when individual hoists still have to be operated. In the case of group connections of the drives, however, the use of the operating computer is preferable. Accordingly, the hoist system according to the invention allows both individual trips and group switching of the respective drives.
Dem Steuerrechner wird über Istwertgeber die jeweilige Position der Antriebe mitgeteilt, ebenso, vorzugsweise über an sich bekannte Dehnungsmeßstreifen, die jeweilige Last der einzelnen Hubzüge. Alle in Bewegung befindlichen Hubzüge einer Gruppe werden auf Gleichlauf, Last und Höhenposition, alle sich im Stillstand befindlichen Motoren auf Stillstand und Last überprüft. Bei Bewegung der Einzelzüge erfolgt eine Überprüfung auf Höhenposition und Last.The control computer is informed of the respective position of the drives via actual value transmitters, and likewise, preferably via strain gauges known per se, the respective load of the individual hoist trains. All the hoists in motion in a group are checked for synchronism, load and height position, all motors that are at a standstill are checked for standstill and load. When the individual trains move, the height position and load are checked.
Zugleich führt der Steuerrechner vorzugsweise Listen mit den maximal zulässigen Lasten der Aufhängepunkte, bei deren Überschreiten die gesamte Anlage gestoppt wird und gegebenenfalls vorgegebene, sicherheitsgerichtete Maßnahmen durchgeführt werden, etwa eine Entlastung der Aufhängepunkte durch Zurückfahren in eine Ausgangsposition. Fehlermeldungen werden an den Bedienrechner weitergegeben und auf ihm dargestellt.At the same time, the control computer preferably maintains lists with the maximum permissible loads of the suspension points, the exceeding of which stops the entire system and, if necessary, predetermined, safety-related measures are carried out, for example relieving the suspension points by returning to a starting position. Error messages are forwarded to the operator computer and displayed on it.
Der Steuerrechner überprüft zudem ständig den Datenverkehr im koaxialen Ringnetz und führt bei Störungen die vorgegebenen, sicherheitsgerichteten Maßnahmen durch, etwa die Stillegung der Hubzüge oder das Zurückfahren in eine vorgegebene oder Ausgangsposition.The control computer also continuously checks the data traffic in the coaxial ring network and, in the event of malfunctions, carries out the specified, safety-related measures, such as decommissioning the hoist trains or returning to a specified or starting position.
Der Steuerrechner überwacht und verwaltet die Befehlstasten, Schalter und Anzeigen des Bedienterminals, interpretiert Gruppenzusammenstellungen der einzelnen Hubzüge und speichert Datenketten für vorgegebene Bewegungsabläufe. Die Freigabe für die Fahrbefehle erfolgt durch den Steuerrechner, wenn dieser die Prüfung aller Vorgänge vorgenommen hat.The control computer monitors and manages the command buttons, switches and displays of the operator terminal, interprets group combinations of the individual hoists and stores data chains for specified movement sequences. The control computer releases the travel commands when it has checked all the processes.
Das Hubzugsystem verfügt über ein fest installiertes Höhenmeßsystem, das in den Ist/Sollwert-Vergleich des Steuerrechners einbezogen ist. Bei Gruppenfahrten werden die einzelnen Hubzüge auf Einhaltung der zulässigen Höhenabweichung innerhalb der Gruppe überwacht, um eingehängte Traversenkonstruktionen nicht zu zerstören und Gewichtsverlagerungen innerhalb einer Gruppe von Hubzügen und dadurch hervorgerufene punktuelle Überlastungen zu vermeiden.The hoist system has a permanently installed height measuring system which is used to compare the actual / setpoint of the Tax calculator is involved. During group journeys, the individual hoists are monitored for compliance with the permissible height deviation within the group in order not to destroy suspended truss constructions and to avoid weight shifts within a group of hoists and the resulting overloading.
Eine Gewichtserfassung über an den Einzelantrieben vorzugsweise angeordneten Lastmeßeinrichtungen ermöglicht es, innerhalb einer Gruppe Lastverschiebungen zu erkennen und bei Überschreiten der zulässigen Toleranz die Antriebe zu stoppen und gegebenenfalls weitere Maßnahmen einzuleiten.A weight detection by means of load measuring devices preferably arranged on the individual drives makes it possible to recognize load shifts within a group and to stop the drives when the permissible tolerance is exceeded and, if necessary, to take further measures.
Bei Unterschreiten einer vorgegebenen Minimallast eines einzelnen Hubzugs oder einer Gruppe von Hubzügen, was beispielsweise bei Aufsetzen einer Traverse oder der Flasche eines Hubzugs auf ein Hindernis auftreten kann, erfolgt ebenfalls eine Abschaltung des Systems, um einer Gefahr durch Schlaffseil- bzw. Schlaffkettenbildung vorzubeugen.If the minimum load of an individual hoist or a group of hoists is undershot, which can occur, for example, when a crossbar or the bottle of a hoist is placed on an obstacle, the system is also switched off to prevent the danger of slack rope or slack chain formation.
Eine Schlaffkettenabschaltung bei unbelasteten Hubzügen muß erfolgen, damit Gefahren für Personen vermieden werden. Fährt ein unbelasteter Hubzug auf ein Hindernis, bleibt an dieser Stelle die Hakenflasche liegen und die Kette fährt weiter abwärts (Schlaffkettenbildung).A slack chain shutdown must be carried out when the hoist is not under load so that dangers to people are avoided. If an unloaded hoist hits an obstacle, the hook block stops at this point and the chain continues to descend (slack chain formation).
Bleibt dieser Zustand unbemerkt, kann die Hakenflasche zu Boden fallen und beim Herabfallen eine Person verletzen. Eine Schlaffkettenabschaltung bei belasteten Hubzügen, die in einer Gruppe verfahren werden, kann folgende Problematik vermeiden. Besteht die Gruppe aus z.B. vier Antrieben und beim Auffahren auf ein Hindernis werden drei Hubzüge entlastet, dann besteht die Gefahr einer Überlast für den vierten Hubzug. Es entsteht eine punktuelle Last, die eine Gefahr der Überlastung des Antriebs, des Zugmittels (Bruch der Kette bzw. des Seils) beinhaltet oder aber die zulässige Deckenlast in diesem Aufhängepunkt kann überschritten werden. Die gleiche punktuelle Überlast kann entstehen, wenn drei Hubzüge der oben beschriebenen Gruppe gleichzeitig ausfallen.If this condition goes unnoticed, the hook block can fall to the ground and injure a person if it falls. A slack chain shutdown on loaded hoists that are moved in a group can avoid the following problems. If the group consists of, for example, four drives and when hitting an obstacle if three hoists are relieved, there is a risk of overloading the fourth hoist. A punctiform load arises which contains a risk of overloading the drive, the traction means (breakage of the chain or the rope) or the permissible ceiling load at this suspension point can be exceeded. The same point overload can occur if three hoists of the group described above fail at the same time.
Alle sicherheitsrelevanten Daten sind netzunabhängig gespeichert, vorzugsweise in einem batteriegepufferten RAM des Steuerrechners. Vorzugsweise erfolgt weiterhin eine Speicherung aller während des Betriebs aufgetretenen Daten, insbesondere der minimal bzw. maximal aufgetretenen Lasten, innerhalb des Steuerrechners, um ein reproduzierbares Veranstaltungsprotokoll zu erhalten und abrufen zu können und auftretende Bedienungsfehler zu dokumentieren.All safety-relevant data is stored independent of the network, preferably in a battery-buffered RAM of the control computer. Preferably, all the data that has occurred during operation, in particular the minimum or maximum loads that have occurred, is also stored within the control computer in order to obtain and be able to retrieve and reproduce a reproducible event log and to document operating errors that occur.
Die Überwachung auf Gleichlauf der Antriebe erfolgt durch die installierte Höhenmeßeinrichtung, z.B. mittels Inkrementalgeber. Es ist aber auch denkbar, einen sogenannten errechneten Leitzug zu definieren. Der Steuerrechner errechnet sich die Daten für den Leitzug und vergleicht diese dann mit den real gemessenen. Neben dem Vergleich der Werte durch die beiden Kanäle des Steuerrechners sind weitere Maßnahmen zur Erhöhung der Sicherheit möglich. Eine bevorzugte Möglichkeit ist die Mehrfacherfassung der Position und des Gewichts. Beide Kanäle des Steuerrechners vergleichen die Meßwerte miteinander und leiten bei Abweichungen die sicherheitsgerichteten Maßnahmen ein. Bei doppelter Erfassung der Position und des Gewichts wenigstens eines Teils der Hubzüge wird zweckmäßigerweise jeder der beiden parallelen Datensätze von jeweils einem Kanal erfaßt.The drive is monitored for synchronism by the installed height measuring device, for example using an incremental encoder. However, it is also conceivable to define a so-called calculated routing. The control computer calculates the data for the lead train and then compares it with the real measured data. In addition to comparing the values through the two channels of the control computer, further measures to increase security are possible. A preferred option is to record the position and weight multiple times. Both channels of the control computer compare the measured values with each other and initiate the safety-related measures in the event of deviations. If the position and the weight of at least some of the hoists are recorded twice, each is expediently of the two parallel data records from one channel each.
Es können, je nach Anwendungsfall, Gruppenbildungsregeln definiert werden, die z.B. verhindern, daß belastete Antriebe nicht aus einer Gruppe gelöscht werden können, bevor diese entlastet wurden, und eine doppelte Belegung in zwei unterschiedliche Gruppen zu verhindern.Depending on the application, group formation rules can be defined, e.g. prevent loaded drives from being deleted from a group before they have been relieved, and to prevent double assignment in two different groups.
Die Steuerung ermöglicht gegenläufige Bewegungen, und bei Vorgabe von unterschiedlichen Wegstrecken errechnet der Steuerrechner die notwendige Geschwindigkeit aller Züge, damit alle Züge zur gleichen Zeit am Ziel ankommen. Es sind ebenso zeitversetzte Bewegungen, Bewegungen in Wellenform, Schaukelbewegungen und Bewegungen in Kippabläufen möglich.The control enables opposite movements, and if different distances are specified, the control computer calculates the necessary speed of all trains so that all trains arrive at their destination at the same time. Time-shifted movements, movements in the form of waves, rocking movements and movements in tilting sequences are also possible.
Auf dem Bedienrechner kann gegen unbefugte Bedienung eine Anmeldeprozedur installiert werden, die erst durchlaufen werden muß, bevor das System die Freigabe erteilt.To prevent unauthorized use, a logon procedure can be installed on the operating computer, which must first be carried out before the system releases the system.
Alle Daten, die abgespeichert werden, seien es sicherheitsrelevante oder veranstaltungsbezogene Daten, sind neben der Speicherung auf der Festplatte auch auf Diskette abspeicherbar. Ebenso sind diese Daten mit Hilfe eines Protokolldruckers ausdruckbar.All data that is saved, be it security-related or event-related data, can be saved on disk as well as on disk. This data can also be printed out using a log printer.
Der Bedienrechner kann in weitere Unterbedienpulte aufgeteilt werden, die dann in Bereiche gebracht werden können, in denen komplizierte Bewegungsabläufe durchgeführt werden. Auf den Unterbedienpulten können nur Antriebe angewählt werden, die zuvor durch den Bedienrechner freigegeben wurden. Der Bedienrechner koordiniert die verschiedenen Unterbedienpulte und gibt die Daten aller Unterbedienpulte an den Steuerrechner weiter. Es ist aber auch eine Ausführung möglich, bei der alle Bedienpulte direkt mit dem Steuerrechner kommunizieren.The operating computer can be divided into further sub-control panels, which can then be brought into areas in which complicated movements are carried out. Only drives that were previously approved by the operator computer can be selected on the sub-control panels. The operating computer coordinates the various sub-control panels and gives them Data from all sub-control panels to the control computer. However, a version is also possible in which all control panels communicate directly with the control computer.
Die Hubzüge können entweder ortsfest oder beweglich installiert sein.The hoists can either be installed stationary or movable.
Die Steuerung ist auch für alle weiteren Antriebsarten einsetzbar, wie z.B. hydraulische Antriebe, die Podeste und Bühnen heben.The control can also be used for all other drive types, e.g. hydraulic drives that lift platforms and platforms.
Nachfolgend werden bevorzugte Ausführungsformen der Erfindung anhand der Zeichnungen beschrieben. Es zeigen:
- Fig. 1
- schematisch die Verknüpfung der einzelnen Komponenten des Hubzugsystems,
- Fig. 2
- schematisch die Verknüpfung zweikanaliger Steuerrechner mit den einzelnen Antrieben,
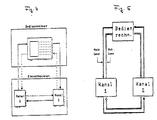
- Fig. 3
- schematisch die Verknüpfung zweikanaliger Steuerrechner mit dem Bedienterminal,
- Fig. 4
- schematisch die Verknüpfung Bedienrechner mit dem zweikanaligen Steuerrechner,
- Fig. 5
- schematisch das koaxiale Ringnetz,
- Fig. 6
- ein Trackingsystem auf der Basis eines erfindungsgemäßen Hubzugsystems.
- Fig. 1
- schematically the connection of the individual components of the hoist system,
- Fig. 2
- schematically the connection of two-channel control computers with the individual drives,
- Fig. 3
- schematically the connection of two-channel control computers with the operator terminal,
- Fig. 4
- schematically the link between the operating computer and the two-channel control computer,
- Fig. 5
- schematically the coaxial ring network,
- Fig. 6
- a tracking system based on a hoist system according to the invention.
Fig. 1 zeigt die Zuordnung der einzelnen Komponenten zueinander. Der zweikanalige Steuerrechner (1) hat über das koaxiale Ringnetz (2) Zugriff auf das Bedienterminal (5), den Bedienrechner (6) und die einzelnen Antriebe (4a, 4b, 4c, 4d, ... 4n).1 shows the assignment of the individual components to one another. The two-channel control computer (1) has access to the operator terminal via the coaxial ring network (2) (5), the operating computer (6) and the individual drives (4a, 4b, 4c, 4d, ... 4n).
Fig. 2 zeigt die zweikanalige Struktur des Steuerrechners, bei der jeder der Kanäle (1 und 2) unabhängig Zugang zu den Daten und zum Ringnetz hat. Alle Daten der Antriebe an den Steuerrechner werden von beiden Kanälen des Steuerrechners gelesen, und es findet ein Vergleich zwischen den Kanälen statt. Diese Maßnahme beugt vor allem Mehrfachfehlern vor und vermeidet, daß Fehlinformationen den Betriebsablauf stören. Führt der Vergleich zu voneinander abweichenden Werten, wird das System stillgelegt oder es werden andere, vorgegebene Maßnahmen eingeleitet.Fig. 2 shows the two-channel structure of the control computer, in which each of the channels (1 and 2) has independent access to the data and to the ring network. All data from the drives to the control computer are read from both channels of the control computer and a comparison between the channels takes place. This measure above all prevents multiple errors and prevents misinformation from interfering with the operational process. If the comparison leads to different values, the system is shut down or other, predetermined measures are initiated.
Der Takt des Systems wird durch ein definiertes Zeitfenster vorgegeben, das auch die zeitliche Abstimmung der Kanäle regelt. Die Gewichtserfassung erfolgt beispielsweise über Dehnungsmeßstreifen (DMS), die über Last-Frequenz-Wandler (LSW) und Frequenz-Spannungs-Wandler (FSW) die erfaßten Werte an die Kanäle des Steuerrechners weitergeben. Bei Überlast wird über die Hauptschütze der betreffende und die anderen Motoren abgestellt.The clock of the system is specified by a defined time window, which also regulates the timing of the channels. The weight is recorded, for example, via strain gauges (DMS), which transmit the recorded values to the channels of the control computer via load-frequency converters (LSW) and frequency-voltage converters (FSW). In the event of an overload, the relevant contactors and the other motors are switched off via the main contactors.
Ebenso werden die Daten vom Bedienterminal gemäß Fig. 3 und vom Bedienrechner gemäß Fig. 4 von beiden Kanälen des Steuerrechners geprüft.Likewise, the data from the operator terminal according to FIG. 3 and from the operator computer according to FIG. 4 are checked by both channels of the control computer.
Fig. 5 zeigt das koaxiale Ringnetz mit einem Main Loop und einem Sub Loop. Besteht z.B. eine Störung des Main Loop zum Kanal (1), so wird sofort auf den Sub Loop umgeschaltet.5 shows the coaxial ring network with a main loop and a sub loop. For example, If the main loop to the channel (1) fails, the sub loop is immediately switched to.
Ein mögliches Anwendungsbeispiel ist die Positionierung von Beleuchtungs- und Beschallungsanlagen über der Bühne bei Musikveranstaltungen. Zuerst wird der "künstliche" Schnürboden mit den Hubzügen auf Arbeitshöhe gefahren. Danach werden Musikboxen auf die Bühne gefahren, die nun an beliebigen Punkten des "künstlichen" Schnürbodens befestigt werden können, wenn nicht die maximal zulässige Belastung in den Aufhängepunkten überschritten wird.A possible application example is the positioning of lighting and sound systems above the Stage at music events. First, the "artificial" lace-up floor is moved to the working height with the hoists. Then music boxes are moved onto the stage, which can now be attached to any point on the "artificial" lacing floor, if the maximum permissible load in the suspension points is not exceeded.
Ein weiterer Anwendungsfall der Hubzugsteuerung ist das nachfolgend beschriebene "Trackingsystem", welches über Hubzüge verfügt, die einen Rahmen in vertikaler Richtung verfahren. Zugleich ist dieses Trackingsystem, z. B. über ein Schienensystem, in horizontaler Richtung verfahrbar.Another application of the hoist control is the "tracking system" described below, which has hoists that move a frame in the vertical direction. At the same time, this tracking system, e.g. B. on a rail system, movable in the horizontal direction.
Das Gesamtsystem kann, wie in Fig. 6 dargestellt, realisiert werden.The overall system can be implemented as shown in FIG. 6.
Mit den Hubzügen 4a, 4b, 4c wird eine Traversenkonstruktion 10 in der Höhe verfahren. An der Traversenkonstruktion 10 ist ein Schienensystem 11 montiert, an dem ein Rahmen 12 verfahren wird. Auf dem Rahmen 12 befinden sich Antriebe, die einen zweiten Rahmen 13 verfahren bzw. kippen können. Ebenso ist für die horizontale Bewegung des Rahmens 12 ein Antrieb vorgesehen.With the
Alle diese Antriebe können über die eingangs beschriebene Steuerung verfahren werden. Es sind Einzel- und Gruppenfahrten möglich. Die Fahrhebel befinden sich auf dem zentralen Bedienpult, bzw. einem Nebenpult, welches alle Funktionen des Trackingsystems ermöglicht. Mit den Fahrhebeln erfolgt eine zur Hebelauslegung proportionale Geschwindigkeitserhöhung. Dadurch ist die Geschwindigkeit stufenlos verstellbar. Die maximale Geschwindigkeit der einzelnen Antriebe ist vorzugsweise über die Steuerung begrenzt. Mit Hilfe der Fahrhebel können Bewegungsabläufe im Teach In-Verfahren abgefahren und nachher abgespeichert werden. Einzelne Bewegungsabläufe, auch "Cue's" genannt, können dann zu komplexeren Bewegungsabläufen verknüpft weren. So zusammengestellte Bewegungsabläufe können dann automatisch wieder abgerufen werden.All of these drives can be moved using the control described at the beginning. Single and group trips are possible. The driving levers are located on the central control panel or a secondary panel, which enables all functions of the tracking system. The driving levers increase the speed proportionally to the lever design. This means that the speed is infinitely adjustable. The maximum speed of the individual drives is preferably limited by the control. With the help of the drive levers movement sequences can be followed in the teach-in process and saved afterwards. Individual movement sequences, also called "cue's", can then be linked to form more complex movement sequences. Movements assembled in this way can then be called up again automatically.
Die Fahrdaten können ebenso über die Tastatur eingegeben werden.The driving data can also be entered using the keyboard.
Auf dem Bedienpult können mehrere Monitore montiert sein. Eine Variante ist z.B., daß auf einem Monitor des Bedienpultes die aktuellen Fahrdaten, die Anfangs- und Endpositionen dargestellt werden. Auf einem zweiten Monitor ist ein Grundriß der örtlichen Gegebenheiten dargestellt und werden die Bewegungen der Antriebe maßstäblich aufgezeigt. Es kann zweckmäßigerweise zwischen verschiendenen Ansichten (Seitenansicht, Draufsicht etc.) umgeschaltet werden.Several monitors can be mounted on the control panel. A variant is, for example, that the current driving data, the start and end positions are displayed on a monitor of the control panel. A floor plan of the local conditions is shown on a second monitor and the movements of the drives are shown to scale. It can be conveniently switched between different views (side view, top view, etc.).
Vorher definierte Sicherheitsbereiche können verhindern, daß gefährdete Bereiche angefahren werden.Predefined safety areas can prevent hazardous areas from being approached.
Die Benutzeroberfläche auf dem Monitor bietet natürlich noch weitere Darstellungsmöglichkeiten, die hier nicht weiter aufgeführt werden.The user interface on the monitor naturally offers further display options, which are not listed here.
Eine weitere Besonderheit, die das Trackingsystem insbesondere beinhaltet, ist die Möglichkeit, über den verfahrbaren Rahmen einen Scannerkopf einer Laseranlage zu verfahren. Durch eine Glasfaserleitung wird es möglich, daß der Scannerkopf des Lasers im Raum verfährt und dadurch Lasereffekte im dreidimensionalen Raum erzeugt werden. Eine Kombination des Trackingsystems mit dem Laser eröffnet neue vielfältige Show- und Lichteffekte in noch nicht dagewesener Weise.Another special feature that the tracking system contains in particular is the possibility of moving a scanner head of a laser system via the movable frame. A fiber optic cable makes it possible for the scanner head of the laser to move in space, thereby producing laser effects in three-dimensional space. A combination of the tracking system with the laser opens up new, varied show and lighting effects in an unprecedented way.
Claims (18)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE4108969A DE4108969A1 (en) | 1991-03-19 | 1991-03-19 | COMPUTER-CONTROLLED HOISTING SYSTEM WITH AT LEAST TWO HOISTS |
| DE4108969 | 1991-03-19 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0504867A1 true EP0504867A1 (en) | 1992-09-23 |
| EP0504867B1 EP0504867B1 (en) | 1996-12-27 |
Family
ID=6427684
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP92104771A Expired - Lifetime EP0504867B1 (en) | 1991-03-19 | 1992-03-19 | Computer controlled system for lifting loads with at least two hoists |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP0504867B1 (en) |
| AT (1) | ATE146687T1 (en) |
| DE (2) | DE4108969A1 (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004077177A1 (en) * | 2003-02-28 | 2004-09-10 | Gottwald Port Technology Gmbh | Method and device for safely disconnecting electric drives |
| WO2007010290A2 (en) * | 2005-07-22 | 2007-01-25 | Spatial Systems Limited | Apparatus for providing a variable surface |
| US8033528B2 (en) | 2006-04-28 | 2011-10-11 | Electronic Theatre Controls, Inc. | Lift assembly, system, and method |
| WO2011133993A1 (en) * | 2010-04-27 | 2011-11-03 | Waagner-Biro Austria Stage Systems Ag | Method and system for balancing forces or torques in a point hoist or flybar |
| US9061869B2 (en) | 2009-11-18 | 2015-06-23 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| US9493328B2 (en) | 2007-11-08 | 2016-11-15 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| EP3130382A1 (en) * | 2015-08-10 | 2017-02-15 | ISA Co., Ltd. | Stage representation system and stage representation method |
| US11111117B2 (en) | 2012-12-21 | 2021-09-07 | Electronic Theatre Controls, Inc. | Compact hoist system |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4440064C2 (en) * | 1994-11-10 | 2000-09-21 | Hella Kg Hueck & Co | Circuit arrangement for controlling electrical loads |
| DE19612423A1 (en) * | 1996-03-28 | 1997-10-02 | Siemens Ag | Redundant control and safety system for crane |
| DE10041035A1 (en) | 2000-08-22 | 2002-03-07 | Heinrich Bader | Device and method for mechanizing cable and brochure hoists, especially in the stage area |
| DE10146521B4 (en) * | 2001-09-21 | 2006-08-17 | Rainer Puls | Control system for winches and other machines |
| DE10209482A1 (en) * | 2002-03-05 | 2003-10-02 | Wittenstein Ag | Process for designing a stage set |
| DE102005050699B4 (en) * | 2005-10-18 | 2016-01-07 | Terex Cranes Germany Gmbh | Method for operating a crane with multiple rope drive |
| ATE540343T1 (en) | 2009-10-23 | 2012-01-15 | Sick Ag | SAFETY CONTROLS |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3986703A (en) * | 1973-06-21 | 1976-10-19 | Evershed Power-Optics Limited | Movement of scenery in theaters and studios |
| DE3233468A1 (en) * | 1982-09-09 | 1984-03-15 | Trepel Ag, 6200 Wiesbaden | Control system for the loft machinery of stages |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3103708A1 (en) * | 1981-02-04 | 1982-08-12 | Bayerische Bühnenbau GmbH, 8480 Weiden | Apparatus for operating theatre pull mechanisms of a theatre stage |
| DE3303607A1 (en) * | 1983-02-03 | 1983-07-14 | Dieter 5800 Hagen Müller | Synchronisation control for lifting elements with a common load |
| DE3420596C2 (en) * | 1984-06-01 | 1986-10-02 | Dr.-Ing. Ludwig Pietzsch Gmbh & Co, 7505 Ettlingen | Monitoring and control system for jib cranes |
| DE3714804A1 (en) * | 1987-05-04 | 1988-11-17 | Siemens Ag | Optical information storage disc |
| US4905848A (en) * | 1988-06-06 | 1990-03-06 | Skjonberg Knut B | Coordinated hoist controllers |
-
1991
- 1991-03-19 DE DE4108969A patent/DE4108969A1/en not_active Withdrawn
-
1992
- 1992-03-19 EP EP92104771A patent/EP0504867B1/en not_active Expired - Lifetime
- 1992-03-19 AT AT92104771T patent/ATE146687T1/en active
- 1992-03-19 DE DE59207741T patent/DE59207741D1/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3986703A (en) * | 1973-06-21 | 1976-10-19 | Evershed Power-Optics Limited | Movement of scenery in theaters and studios |
| DE3233468A1 (en) * | 1982-09-09 | 1984-03-15 | Trepel Ag, 6200 Wiesbaden | Control system for the loft machinery of stages |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2004077177A1 (en) * | 2003-02-28 | 2004-09-10 | Gottwald Port Technology Gmbh | Method and device for safely disconnecting electric drives |
| JP2006519149A (en) * | 2003-02-28 | 2006-08-24 | ゴットヴァルト ポート テクノロジー ゲーエムベーハー | Method and apparatus for safely disconnecting an electric drive such as a frequency controlled three-phase crane motor |
| US7515389B2 (en) | 2003-02-28 | 2009-04-07 | Gottwald Port Technology Gmbh | Method and device for safely disconnecting electric drives |
| WO2007010290A2 (en) * | 2005-07-22 | 2007-01-25 | Spatial Systems Limited | Apparatus for providing a variable surface |
| WO2007010290A3 (en) * | 2005-07-22 | 2007-11-15 | Spatial Systems Ltd | Apparatus for providing a variable surface |
| US8033528B2 (en) | 2006-04-28 | 2011-10-11 | Electronic Theatre Controls, Inc. | Lift assembly, system, and method |
| US10328358B2 (en) | 2007-11-08 | 2019-06-25 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| US9493328B2 (en) | 2007-11-08 | 2016-11-15 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| US10799809B2 (en) | 2007-11-08 | 2020-10-13 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| US9061869B2 (en) | 2009-11-18 | 2015-06-23 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| US10227221B2 (en) | 2009-11-18 | 2019-03-12 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| US10968085B2 (en) | 2009-11-18 | 2021-04-06 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| US11511978B2 (en) | 2009-11-18 | 2022-11-29 | Electronic Theatre Controls, Inc. | Lift assembly systems and methods |
| AT509781B1 (en) * | 2010-04-27 | 2013-02-15 | Waagner Biro Austria Stage Systems Ag | METHOD AND DEVICE FOR COMPENSATING FORCES MOMENTS IN A POINT TRAY OR PROSPECTOR |
| WO2011133993A1 (en) * | 2010-04-27 | 2011-11-03 | Waagner-Biro Austria Stage Systems Ag | Method and system for balancing forces or torques in a point hoist or flybar |
| US11111117B2 (en) | 2012-12-21 | 2021-09-07 | Electronic Theatre Controls, Inc. | Compact hoist system |
| US11319198B2 (en) | 2012-12-21 | 2022-05-03 | Electronic Theatre Controls, Inc. | Compact hoist accessories and combination systems |
| EP3130382A1 (en) * | 2015-08-10 | 2017-02-15 | ISA Co., Ltd. | Stage representation system and stage representation method |
Also Published As
| Publication number | Publication date |
|---|---|
| ATE146687T1 (en) | 1997-01-15 |
| EP0504867B1 (en) | 1996-12-27 |
| DE4108969A1 (en) | 1992-09-24 |
| DE59207741D1 (en) | 1997-02-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0504867B1 (en) | Computer controlled system for lifting loads with at least two hoists | |
| EP1894882B1 (en) | Safety and steering method for cranes | |
| EP2748101B1 (en) | Method and control assembly for operating in parallel at least two lifting devices, in particular cranes | |
| EP3353108B1 (en) | Surveillance device for a lift system | |
| EP1371596A1 (en) | Safety device for a group of elevators | |
| EP2719652B1 (en) | Device for the transportation of persons by means of a crane, and crane with a device for the transportation of persons | |
| EP2160349B1 (en) | Arrangement, module and method for reliably operating a system | |
| DE112006000498T5 (en) | elevator system | |
| DE112006000500T5 (en) | elevator system | |
| DE3233468A1 (en) | Control system for the loft machinery of stages | |
| EP1313664A1 (en) | Redundant safety system of a vehicle | |
| EP3368462B1 (en) | Method for operating at least two lifting devices as a group, and assembly comprising a least two lifting devices | |
| DE2363261C3 (en) | Device for controlling the movement of the booms of a first and at least one second crane | |
| DE19611573C2 (en) | Device and method for moving buildings | |
| EP1427499B1 (en) | Control system for winches and other machines | |
| DE19905020A1 (en) | Continuous monitoring of normal crane functioning involves comparing predefinable lifting motion demand value with actual value, activating emergency brake if deviation excessive | |
| DE102019208892A1 (en) | Method for operating a driverless transport system | |
| WO2013178508A1 (en) | Lifting device | |
| DE2649370B2 (en) | Device for synchronizing a point cable device for theater stages | |
| EP1818309A1 (en) | Crane control | |
| DE3025130A1 (en) | Transportable directed hoist for stage use - moves grid-irons in directions other than vertical and has rope winch, reduction drive and electric drive with monitoring devices | |
| EP1024107A2 (en) | Crane, in particular for transporting molten masses | |
| DE10230469B4 (en) | Device for monitoring the permissibility of the instantaneous load of a lifting device | |
| WO2024217734A1 (en) | Method, system, and computer program for moving a load by means of a plurality of cranes | |
| DE102023109701A1 (en) | Method, system and computer program product for moving a load by means of a plurality of cranes |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH DE DK ES FR GB IT LI NL SE |
|
| 17P | Request for examination filed |
Effective date: 19930323 |
|
| 17Q | First examination report despatched |
Effective date: 19930804 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: FRUEH, INGOLF |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE DK ES FR GB IT LI NL SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRE;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED.SCRIBED TIME-LIMIT Effective date: 19961227 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19961227 Ref country code: ES Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 19961227 Ref country code: DK Effective date: 19961227 |
|
| REF | Corresponds to: |
Ref document number: 146687 Country of ref document: AT Date of ref document: 19970115 Kind code of ref document: T |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19970102 |
|
| REF | Corresponds to: |
Ref document number: 59207741 Country of ref document: DE Date of ref document: 19970206 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19970327 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: RITSCHER & SEIFERT PATENTANWAELTE VSP |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Effective date: 19970331 |
|
| ET | Fr: translation filed | ||
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| BERE | Be: lapsed |
Owner name: FRUH INGOLF Effective date: 19970331 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19971128 |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19980403 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 19980423 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 19980424 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990319 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990319 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990331 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990331 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19990319 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20010104 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20020101 |