EP0161010A1 - Procédé et dispositif de préhension de couches souples en particulier textiles et machine pour la préhension et le transfert desdites couches - Google Patents
Procédé et dispositif de préhension de couches souples en particulier textiles et machine pour la préhension et le transfert desdites couches Download PDFInfo
- Publication number
- EP0161010A1 EP0161010A1 EP85200233A EP85200233A EP0161010A1 EP 0161010 A1 EP0161010 A1 EP 0161010A1 EP 85200233 A EP85200233 A EP 85200233A EP 85200233 A EP85200233 A EP 85200233A EP 0161010 A1 EP0161010 A1 EP 0161010A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- needle
- relative
- bearing surface
- head
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A41—WEARING APPAREL
- A41H—APPLIANCES OR METHODS FOR MAKING CLOTHES, e.g. FOR DRESS-MAKING OR FOR TAILORING, NOT OTHERWISE PROVIDED FOR
- A41H43/00—Other methods, machines or appliances
- A41H43/02—Handling garment parts or blanks, e.g. feeding, piling, separating or reversing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H3/00—Separating articles from piles
- B65H3/22—Separating articles from piles by needles or the like engaging the articles
Definitions
- the invention relates to a method and a device for gripping flexible layers, in particular textile, knitted, woven or other layers; it extends to a machine allowing the transfer of these layers from a stack or several stacks where said layers are stored in superimposed positions, to one or more other locations.
- a gripper of the latter type is described in the French patent application published under No. 2,468,531 and in the request for certificate of addition published under No. 2,482,064.
- the flexible layer is gripped by means of two needles which cross out of a casing in order to penetrate at an angle into one or more flexible layers of the stack: by the effect of their crossing, these needles have a retaining action of the layer or layers in which they are embedded.
- German patent No. 2,002,750 and in French patent No. 2,218,417 a technique for gripping pieces of fabric which uses a curved needle and consists in rotating the latter around its center of curvature so that said needle protrudes from a plate and enters the tissue which is perfectly immobilized, until it emerges therefrom on the same face at the end of its circular movement.
- these patents recommend, that during its circular movement around its center of curvature, the needle must protrude from the plate to a depth less than the thickness of the layer to be gripped; if it were otherwise, the needle would also grasp the neighboring layer since it would penetrate into it. Under these conditions, only one fiber or a small number of fibers of the layer to be separated are gripped by the needle.
- the present invention proposes to remedy the aforementioned faults of known gripping devices. It aims to provide a new gripping device in which the gripping is ensured by means of a needle, under conditions suitable for eliminating all the defects of known grippers and in particular of grippers with crossed needles and grippers with curved needles rotating around their center of curvature.
- One objective of the invention is in particular to simultaneously obtain the three essential qualities for good operating reliability: secure grip of the layer or layers to be gripped, assured take-off of this layer or of these layers relative to the lower layers, safe release of this layer or these layers in order to deposit them.
- Another objective is to achieve these results with a space-saving gripping device, of simple structure and of low cost.
- Another objective of the invention directly linked to the previous ones (reliability, low cost, reduced bulk) is to provide a machine for gripping and transferring textile pieces, allowing, by means of several grippers, to grip and transfer with excellent reliability, parts of all shapes and sizes.
- the present invention solves the problem posed by this apparent incompatibility and aims a method and a needle device which is able both to allow a firm grip of one or more thin layers and an assured takeoff of the lower layer which must be left in place.
- the movement of the needle is carried out so that, during the movement of its pointed end along the initial portion Ti and the cusp portion Tr, said needle pushes the flexible layer towards the perforated part, and causes it to form a corrugation in said perforated part, the final portion Tf of the trajectory crossing said corrugation.
- Such a method can be implemented using a curved needle with a concavity oriented in the same direction as that of the trajectory (T); but it can also be implemented using a needle of different shape, in particular rectilinear, partially rectilinear or forming an angle.
- the needle is positioned, during its movement along the initial portion (Ti) and the cusp portion (Tr), so that, in each point, the direction of the needle end (defined in the case of a needle curved by the tangent to said needle at its end) does not coincide with the tangent to the trajectory so as to ensure the aforementioned action thrust on the flexible layer.
- the needle is positioned so that the direction of its end is located above the tangent to the trajectory in order to ensure, as will be better understood later, a pushing action tending to lift the layer flexible towards the perforated part of the bearing surface.
- a needle having an end provided with at least one point and, upstream of the latter, a stopper adapted to come into stop against the flexible layer; this retainer ensures or considerably increases the pushing action on the fabric of the upper layer and notably generates or facilitates the formation of the ripple in the fabric.
- the method of the invention leads to forming an undulation of the layer to be gripped inside the openwork part of the bearing surface, and to stitch this undulation in the manner of a stitch, crossing layer ; the fabric is trapped by the needle over its entire thickness and is, at the end of movement of the needle, pinched at its undulation between said needle and the bearing surface.
- the grip which is carried out by all the fibers with pinching of a small portion of the fabric is extremely firm and the experiments have shown that the risks of detachment were negligible even in the case of the thinnest layers of fabric. .
- the gripping of the fabric by pricking and pinching a ripple formed thereon is compatible with a displacement of the needle (relative to the bearing surface) such that the trajectory of its end is very flattened at its cusp portion (Tr); under these conditions, it is easy to adjust the height of this movement so that a single layer or a determined number of layers is entered.
- this air blowing is carried out by simple nozzles arranged above the layers, without the need for hollow needles as in the case of the crossed needle process.
- the detachment of this layer is obtained without difficulty, by subjecting each needle to a reverse displacement relative to its bearing surface, so as to bring back each of said needles in its initial position set back relative to the bearing surface.
- the layer or layers which are then no longer maintained move away by gravity from the bearing surfaces to fall at the desired location.
- the method of the invention is thus not subject to the release difficulties encountered by adhesive grippers and grippers with hanging strips.
- the invention extends to means for implementing the above-mentioned method, comprising at least one head provided with a bearing surface provided with an openwork part, a needle associated with said head and movable relative to the latter and kinematic guide means of each needle relative to the corresponding head, imposing on the needle end a trajectory (T) (relative to the bearing surface taken as a reference) having an initial portion (Ti ), a cusp portion (Tr) and a final portion (Tf) as defined above, in order to have the shape of a C with a concavity oriented towards the bearing surface of the head.
- T trajectory
- the kinematic guide means are adapted to move the corresponding needle according to a movement such that the direction of the end of the needle is distinct from the tangent to the trajectory (T) at least on the initial portion (Ti) and the cusp portion (Tr) of this trajectory.
- the needle has an end provided with at least one point and, upstream of the latter, a stop adapted to come into abutment against the flexible layer; in particular said needle advantageously comprises two separate points, the retainer being formed by the part situated between the bases of said points.
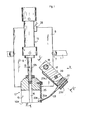
- the gripping device shown by way of example in FIGS. 1 to 4 comprises a frame 1 which carries around a central region -la- several assemblies 2, the structure of which is described in detail below.
- the number of sets 2 and their distribution depend on the shape and dimensions of the textile pieces to be gripped (which will be designated below by "pieces of fabric" whatever their knitted, woven or other texture).
- these sets may be four in number, two by two opposite, so as to grip each part in the vicinity of an angle.
- chassis 1 can be associated with transfer means, making it possible to drive it between several locations where the parts are to be grasped or deposited.
- the chassis 1 is equipped with air blowing means in a substantially vertical direction (or a secant direction relative to the horizontal plane).
- air blowing means comprise a support 3 oriented downwards and pierced at its end with a channel 4 to which is connected a flexible air intake duct 5; the air emerges from the channel 4 through an orifice 4a oriented downwards.
- Each set 2 comprises a plate 6 positioned in a roughly vertical plane; this plate is articulated by two needle screws such as 7 on two legs of the chassis 1 so as to be able to undergo relative to this chassis tilting movements of small amplitude, around a horizontal axis passing through the screws 7.
- the plate 6 is associated with drive means adapted to drive it in rapid round-trip movements, in rotation around the screws 7.
- these means consist, on the one hand, of a single-acting cylinder 8 having a movable projecting rod 8a which bears against the lower part of the plate 6, on the other hand, by a return spring 9 acting on the upper part of said plate.
- Supports 10 and 11 secured to the chassis 1 allow the mounting of these means in appropriate positions.
- the plate 6 supports the body 12a of a double-acting pneumatic cylinder 12, by means of a lug 13 integral with said plate and forming an projection relative to the chassis 1.
- the body 12a of the cylinder is fixed on the lug 13 as shown in Figures 1 and 2, so that the movable rod 12b of said cylinder is directed downwards in a substantially vertical position.
- the jack 12 is associated with a proximity sensor 26 of a type known per se (in particular magnetic) which detects the high position of its piston and then delivers a control signal, causing the latter to lock in this position.
- a proximity sensor 26 of a type known per se (in particular magnetic) which detects the high position of its piston and then delivers a control signal, causing the latter to lock in this position.
- a gripping head 14 is screwed onto the end of the rod 12b of the pneumatic cylinder 12.
- This head is formed by a cylinder portion with a horizontal lower base 14a, called to play the role of a support surface for the tissue to be grasped. Said head is partially split, by a fine groove 15 of thickness slightly greater than that of a puncture needle of the conventional type; this groove extends in a plane (vertical) substantially perpendicular to that of the support surface (horizontal) and opens along a diameter of said support surface.
- the head 14 has an openwork part 16, in the example of circular section, which also opens onto the bearing surface 14a and extends on either side of the plane containing the groove 15. (In l 'example, this perforated part 16 is formed by the extension of a threaded hole which allows the head 14 to be screwed onto the jack rod 12b).
- the head 14 carries a finger 27 which slides in an appropriate notch 6a of the plate 6, in order to avoid rotation of said head on itself (around its vertical axis) and to ensure guidance of that - ci during its vertical translational movement.
- the plate 6 carries a support 17, which is fixed on the latter in a position offset transversely relative to the head 14; this support is fixed on the plate by means of a stud 18 and a tubular spacer 19, which allow it to be assigned a relative preset position relative to said plate.
- This support 17 carries a hinge pin 20 about which a link 21 can pivot; this axis 20 offset transversely with respect to the axis of the head 14 is located above the bearing surface 14a.
- Elastic means are associated with the link 21 and arranged to urge the latter in the direction of its spacing with respect to the head, towards an extreme position where it abuts against the support 17 (position of FIG. 1).
- these elastic means consist of one end 22a of a spring 22, which comes to bear on the link 21; this spring is wound around the tubular spacer 19 and its other end 22b is locked in a hole in the plate 6.
- the link 21 is pierced with a lumen for the passage and fixing of a curved needle 23.
- This needle of the conventional needle pricking type, comprises, opposite its point 23a, a heel 23b which is housed in the above-mentioned light of the link 21 and locked in the preset position by a pressure screw 24.
- the means for positioning the needle are arranged so that (apart from the thicknesses) said needle is located in the plane of the groove 15 of the head and can move in this plane relative to the head, by rotation of the rod 21 about its axis 20; the concavity of said needle is oriented upwards and its center of curvature is located between the axis of articulation 20 and the vertical axis of the head, in a position closer to this vertical axis so as to be very much offset relative to axis 20.
- the needle 23 passes through a guide lumen 25a formed in an element integral with the head (in the example a plate 25 fixed on the edge thereof in the preset position).
- This guide light 25a and the positioning means already mentioned impose at all times the relative position of the needle relative to the head and are adjusted so as to give it the movements which are detailed below.
- FIGS. 5 and 6 show respectively an intermediate position of the needle and its link relative to the head 14 and the final position of attachment of the fabric.
- the combination of the above-mentioned movements leads the needle tip 23a to move on a path T as shown diagrammatically in FIG. 7b.
- This trajectory of the needle tip 23a is considered relative to the head, that is to say taking this head 14 as a reference.
- the needle In all positions, the needle is above the path T: the direction of its tip (tangent to the tip) is located above the tangent to the trajectory and makes an angle with the latter of the order of a few degrees at 20 °.
- FIGS. 7a to 7g illustrate the relative movement of the needle relative to the head 14.
- the needle 23 is positioned so as to be situated initially set back in the groove 15 as shown in FIG. 7a.
- the head is in the low position and the jack 12 which carries it is in the open air, which leaves the head free to rise with constant and low friction forces.
- the link 21 is in the extreme stop position and the needle is in contact with the upper edge of the guide light 25a.
- the stacking symbolized at E in the diagrams is caused to move upwards according to the arrows F in FIG. 7a, until its upper layer S comes into contact with the bearing surface 14a of the head.
- the latter is raised and tends to retract upwards under the thrust of the stack; the pressure of the bearing surface on the stack is substantially constant and low enough not to significantly compress the layers and in particular the upper layer (due to the constant friction forces and low value of the jack 12).
- the needle At the start of the retraction of the head, the needle has relative to said head a vertical downward relative movement until it comes to bear against the lower edge of the guide light 25a: its point then begins to move on the portion Ti of the trajectory until it comes into contact with the layer S as shown in FIG. 7b.
- the spring 22 confers good flexibility on the movement of the needle and conditions a substantially constant penetration pressure of the needle.
- the angle ⁇ of penetration (i.e. the angle defined by the direction of the end of the needle and the plane of the fabric) is between about 15 and 35 °, which guarantees correct penetration of the needle end through the fibers of the fabric.
- This penetration angle 0 is different from the angle (3 formed by the tangent to the trajectory Ti ( ⁇ > ⁇ ) at the same point, because the displacement of the point is not constituted by a rotation around the center of curvature of the needle; it follows that the movement of the needle is not limited to a rotating component, but includes a component in translation constituted by a sliding towards the axis of the head 14, slip which causes a push on the fabric towards this axis.
- the angle ⁇ formed by the tangent to the path T with the layer at the point of penetration is preferably substantially between 3 ° and 15 °, which ensures an effective push on the tissue from the start of penetration to form the ripple (in the case of a locking needle, the value of this angle is less essential, since, as will be seen below, the thrust exerted on the fabric by the retainer is extremely ef effective and sufficient in itself).
- the progressive retraction movement of the head continues as the stack rises.
- the point of the needle having entered the tissue moves over the initial portion Ti of the trajectory, then over the cusp portion Tr (FIG. 7c); the fabric repelled during this movement in the direction of the arrow P forms a ripple of increasing height in the perforated part 16 of the head.
- the means for holding and guiding the needle are adjusted so that the retraction portion Tr of the trajectory is located at a distance from the bearing surface 14a, less than or equal to the thickness of a layer.
- this adjustment is made so that said cusp portion Tr is located in the lowest layer to be grasped, that is to say at a distance greater than (n - 1) e and less than or equal to ne (where e is the thickness of a layer).
- the lifting of the stack E continues as does the upward movement of the head (FIG. 7e); the tip of the needle then describes the final portion Tf of the trajectory, which rises relative to the bearing surface and cuts the plane of this surface at the level of the perforated part 16.
- the needle tip which came out of the fabric on the underside of layer S re-enters it at the level of the ripple.
- the assembly of the needle tends to fade upward in the groove 15 of the head.
- FIG. 7f shows diagrammatically the final position of the needle when its tip reaches the end of the portion Tf of the trajectory.
- the needle tip is positioned recessed in the groove 15 of the head; in the example shown, the needle has come completely back into this groove.
- the fabric stitched right through, in two places, is perfectly blocked by the needle and the support surface without being able to slip and come off.
- the proximity sensor 26 controls the pneumatic supply of the jack 12, which blocks the head in the high retracted position.
- the firmly held fabric is locked in this state and cannot come off regardless of the movements impressed on the head and the stresses exerted on it.
- the stack E is then brought down and simultaneously the jack 8 is subjected to several pneumatic pulses which subject the plate and therefore the needle / head assembly, rapid movements back and forth in a direction substantially parallel to the plane of the support surface.
- air is blown in through the channel 4, the orifice 4a of which is in the immediate vicinity of the layer S when the head 14 is fully retracted in the high position.
- the movements of the actuator 8 and the air blowing are stopped and the gripping device is moved to the desired location.
- the pneumatic cylinder 12 is then controlled in the opposite direction to condition the descent of the head 14 relative to the plate 6.
- the needle 23 then undergoes a reverse movement and releases the layer of fabric (FIG. 7g). It should be noted that the presence of the spring 22 allows this movement to be carried out with all the necessary flexibility. At the end of the stroke, the needle returns to its initial position, set back with respect to the bearing surface.
- FIG. 8 represents a machine for gripping and transferring layers, comprising a device of the type described above, equipped with four gripping assemblies 2.
- This machine comprises a movable stacking support 28 (or several supports), located below and opposite one of the locations where the gripping device can be positioned.
- This stacking support is associated with a jack 29 making it possible to raise it towards the gripping device or to lower it again.
- the gripping device is carried by transfer means adapted to be able to move it between one or more position (s) located opposite the stacking support (s) 28 and one or more other positions located above above places where the layers are to be deposited.
- transfer means adapted to be able to move it between one or more position (s) located opposite the stacking support (s) 28 and one or more other positions located above above places where the layers are to be deposited.
- these means are shown diagrammatically by a carriage 30 movable along guide rails 31 and a jack drive which we see the movable rod at 32; 18 gripping device is suspended from the carriage 30.
- control means adapted to generate the course of the following cycle: lifting of the stacking support 28 towards the gripping device until contact with the latter. view of producing the retraction phase of its heads 14, lowering of said support with rapid back-and-forth movements of the plates 6 relative to the chassis 1 and air blowing, transfer of the gripping device to another position, driving the heads 14 to produce the return phase of the needles 23, return of the gripping device to the aforementioned stacking support or another stacking support.
- each assembly 2 is arranged so that the rods of the jacks 8 have a radial direction (direction extending from the assembly 2 towards the central region of the chassis) and that each needle is located in a tangential plane perpendicular to this direction. It should be noted that such a tangential position of the needles is very favorable for opposing any radial sliding. fabric during tension and relaxation
- the gripping device can be equipped with a needle 33 as shown diagrammatically in FIG. 9.
- This needle has the same general shape as the needle 23, but has at its end two separate points 33a and 33b, which the example are formed by beaks with biased upper faces. These points define at their base a front face 33c acting as a retainer.
- the tips 33a and 33b can have a length of the order of 5/10 mm.
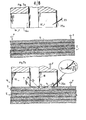
- FIGS. 10a, 10b and 10c illustrate the gripping of a layer by means of such a needle.
- the needle first enters the upper layer, in the same way as the needle 23 previously mentioned, and this, until its stop 33c comes into contact with the upper face of the layer (FIG. 10a).
- the undulation markedly more marked than in the previous case is firmly pinched between the retainer 33c and the opposite edge of the perforated part 16 (FIG. 10c).
- the gripping of the tissue is therefore carried out not only by pricking the tissue, but also by pinching the ripple: it has proven to be extremely safe experimentally, whatever the thickness of the tissue and its texture.
- the invention extends of course to the case of a manual device comprising a single head (or possibly a small number of heads) which would be applied manually against a stack in order to separate one or more upper layers.
- the jack 12 is then replaced by means for guiding the head in translation; the kinematic guide means of the needle remain similar to those described, the blocking of the head in the high retracted position being effected by a latching member, unlockable by hand; a low modulus spring may be provided to ensure the return of the head downwards and the reverse movement of the needle.
- the maintenance of such a device is carried out by a handle integral with the plate.
- Such a very simple device facilitates in certain cases (materials having a strong tendency to adhere) the manual operation of gripping and separation of the layers.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Textile Engineering (AREA)
- Sheets, Magazines, And Separation Thereof (AREA)
- Folding Of Thin Sheet-Like Materials, Special Discharging Devices, And Others (AREA)
Abstract
Description
- L'invention concerne un procédé et un dispositif de préhension de couches souples, en particulier de couches textiles, tricotées, tissées ou autres ; elle s'étend à une machine permettant le transfert de ces couches depuis un empilage ou plusieurs empilages où sont stockées lesdites couches en positions superposées, vers un ou plusieurs autres emplacements.
- Dans l'industrie textile et de la bonneterie, l'automatisation des travaux à effectuer sur les couches de tissus ou tricots pour réaliser des articles finis ou semi-finis achoppe actuellement sur les graves difficultés que présente la saisie de ces couches, par unité ou par nombre bien défini, à partir des empilages fabriqués par découpe ; en effet, ces couches sont la plupart du temps extrêmement minces (épaisseur souvent inférieure au millimètre) et ont tendance à adhérer les unes sur les autres, de sorte que la préhension et la séparation de la couche supérieure ou d'un nombre déterminé de couches au-dessus d'un empilage sont des opérations d'exécution extrêmement délicates (même lorsqu'elles sont pratiquées manuellement).
- A l'heure actuelle, aucun dispositif ne donne entièrement satisfaction pour effectuer ce travail avec une fiabilité compatible avec un processus automatisé. Il existe essentiellement quatre types de préhenseurs :
- - préhenseurs à bandes accrochantes du type "Velcro", présentant les défauts d'être d'application limitée à certains types de tricots (non opérant sur la majorité des tissus) et d'entraîner des difficultés de décrochage de la couche saisie,
- - préhenseurs adhésifs, qui fournissent une bonne préhension, mais entraînent des difficultés de décrochage analogues aux précédents,
- - préhenseurs à roulettes agissant par effet de coincement du tissu ou tricot et présentant le défaut de posséder un fonctionnement très aléatoire et de provoquer la création de plis profonds dans les couches sou-ples,
- - préhenseurs à aiguilles croisées.
- Un préhenseur de ce dernier type est décrit dans la demande de brevet française publiée sous le n° 2.468.531 et dans la demande de certificat d'addition publiée sous le n° 2.482.064. La saisie de la couche souple s'effectue au moyen de deux aiguilles qui sortent d'un carter en se croisant pour pénétrer en biais dans une ou plusieurs couches souples de l'empilage : par l'effet de leur croisement, ces aiguilles ont une action de retenue de la ou des couches dans lesquelles elles sont enfoncées. Toutefois, si un tel dispositif présente une certaine efficacité pour les tricots ou tissus épais, il manque totalement de fiabilité pour les tricots ou tissus fins (de quelques dizièmes de millimètres) ; en effet, si par exemple une seule couche est à saisir, les aiguilles qui descendent dans le tissu ne doivent pas pénétrer dans celui-ci au delà de l'épaisseur d'une couche sous peine de saisir la couche inférieure : compte-tenu de la souplesse et de l'élasticité du matériau, une pénétration de quelques dizièmes de millimètres ne suffit pas à assurer une préhension correcte malgré la position croisée des aiguilles et il est très fréquent que le tissu se détache accidentellement au cours de son transfert.
- En outre, pour décoller la couche inférieure qui a tendance à adhérer à la couche saisie, il est nécessaire dans ce type de dispositif d'opérer avec beaucoup de précautions, compte-tenu du maintien médiocre de la couche saisie. Dans ces conditions, les concepteurs de ce type de dispositifs ont été amenés, ainsi qu'il est décrit dans la demande de certificat d'addition précitée, à prévoir des aiguilles creuses qui pénétrent dans le tissu jusqu'au voisinage immédiat de la face inférieure de la couche à saisir et envoient un jet d'air comprimé sur la couche inférieure, afin de la décoller sans trop de risques de décrocher la couche saisie. Un tel décollage s'avère en pratique peu efficace, cependant que le dispositif de mise en oeuvre d'un tel procédé est relativement onéreux (en particulier, les aiguilles creuses sont d'un coût très supérieur au coût d'une aiguille ordinaire de dimensions analogues).
- Par ailleurs, il a été décrit dans le brevet allemand n° 2 002 750 et dans un brevet français n° 2 218 417 une technique de préhension de pièces de tissu qui utilise une aiguille courbe et consiste à faire tourner celle-ci autour de son centre de courbure de façon que ladite aiguille vienne en saillie par rapport à une plaque et pénètre dans le tissu qui est parfaitement immobilisé, jusqu'à ressortir de celui-ci sur la même face à la fin de son mouvement circulaire. Lorsque les pièces de tissu sont disposées en empilage les unes au-dessus des autres, il est évident, comme le préconisent ces brevets, qu'au cours de son mouvement circulaire autour de son centre de courbure, l'aiguille doit faire saillie de la plaque sur une profondeur inférieure à l'épaisseur de la couche à saisir ; s'il en était autrement, l'aiguille saisirait également la couche voisine puisqu'elle pénétrerait dans celle-ci. Dans ces conditions, seule une fibre ou un petit nombre de fibres de la couche à séparer sont saisies par l'aiguille.
- Dans le cas de couches minces (quelques dizièmes de millimètres),-on retrouve alors le défaut des dispositifs à aiguilles croisées qui assurent une saisie peu efficace dont la fiabilité n'est pas compatible avec un processus de travail automatisé. A la connaissance des inventeurs, ce type de technique utilisant une aiguille unique courbe tournant autour de son centre de courbure n'a jamais été exploité malgré sa relative ancienneté, vraisemblablement à cause de cet inconvénient majeur, qui n'autorise pas une saisie et une séparation sûre d'une couche mince, par rapport aux autres couches d'un empilage. En outre, il est probable qu'un tel dispositif doit conduire fréquemment à une détérioration du tissu par rupture des quelques fibres emprisonnées par l'aiguille.
- La présente invention se propose de remédier aux défauts sus-évoqués des dispositifs de préhension connus. Elle vise à fournir un nouveau dispositif de préhension dans lequel la préhension est assurée au moyen d'une aiguille, dans des conditions propres à écarter tous les défauts des préhenseurs connus et en particulier des préhenseurs à aiguilles croisées et des préhenseurs à aiguille courbe tournant autour de leur centre de courbure.
- Un objectif de l'invention est en particulier d'obtenir simultanément les trois qualités essentielles à une bonne fiabilité de fonctionnement : préhension sûre de la couche ou des couches à saisir, décollage assuré de cette couche ou de ces couches par rapport aux couches inférieures, sécurité de décrochage de cette couche ou de ces couches en vue de les déposer.
- Un autre objectif est d'atteindre ces résultats avec un dispositif de préhension peu encombrant, de structure simple et de faible coût.
- Un autre objectif de l'invention, directement lié aux précédents (fiabilité, faible coût, encombrement réduit) est de fournir une machine de préhension et de transfert de pièces textiles, permettant, au moyen de plusieurs préhenseurs, de saisir et transférer avec une excellente fiabilité, des pièces de toutes formes et de toutes dimensions.
- L'on peut se rendre compte de la difficulté d'atteindre les objectifs ci-dessus indiqués dans le cas de couches minces superposées en empilage. En effet, les deux conditions consistant à :
- . réaliser une saisie ferme de.la couche supérieure de l'empilage afin de pouvoir la décoller des autres couches et la transférer sans risque de détachement,
- . éviter de saisir en même temps la couche du dessous qui ne pourrait alors plus être décollée,
- La présente invention résoud le problème posé par cette incompatibilité apparente et vise un procédé et un dispositif à aiguille qui soit apte à la fois à permettre une saisie ferme d'une ou plusieurs couches minces et un décollage assuré de la couche inférieure qui doit être laissée sur place.
- A cet effet, le procédé proposé par l'invention est du type comprenant les opérations suivantes :
- . appliquer au-dessus d'au moins une zone de la couche souple supérieure de l'empilage, une surface d'appui pourvue d'une partie ajourée, jusqu'à amener cette surface en contact avec ladite couche, laquelle demeure libre au niveau de la partie ajourée,
- . puis déplacer une aiguille par rapport à ladite surface d'appui, de sorte que son extrémité pointue se déplace par rapport à ladite surface d'appui prise comme référence, sur une trajectoire-T comprenant successivement, d'abord, une portion initiale Ti partant de la surface d'appui et s'écartant de celle-ci, de façon à faire pénétrer ladite aiguille dans la couche souple, puis une portion de rebroussement Tr comportant un changement du sens du déplacement relatif de l'extrémité de l'aiguille par rapport à la surface d'appui, enfin une portion finale Tf se rapprochant de la surface d'appui et décalée par rapport à la portion initiale afin de ne pas coïncider avec celle-ci,
- . ensuite, engendrer un mouvement relatif d'écartement entre l'empilage et l'ensemble aiguille/ surface d'appui.
- Conformément à la présente invention, l'on réalise le mouvement de l'aiguille de sorte que, au cours du déplacement de son extrémité pointue le long de la portion initiale Ti et de la portion de rebroussement Tr, ladite aiguille repousse la couche souple vers la partie ajourée, et l'amène à former une ondulation dans ladite partie ajourée, la portion finale Tf de la trajectoire traversant ladite ondulation.
- Un tel procédé peut être mis en oeuvre en utilisant une aiguille courbe à concavité orientée dans le même sens que celle de la trajectoire (T) ; mais il peut également être mis en oeuvre au moyen d'une aiguille de forme différente, en particulier rectiligne, partiellement rectiligne ou formant un angle.
- Selon un mode de mise en oeuvre du procédé de l'invention, l'aiguille est positionnée, au cours de son mouvement le long de la portion initiale (Ti) et de la portion de rebroussement (Tr), de sorte que, en chaque point, la direction de l'extrémité d'aiguille (définie dans le cas d'une aiguille courbe par la tangente à ladite aiguille au niveau de son extrémité) ne coïncide pas avec la tangente à la trajectoire de façon à assurer l'action précitée de poussée sur la couche souple. De préférence, l'aiguille est positionnée de façon que la direction de son extrémité soit située au-dessus de la tangente à la trajectoire en vue d'assurer, comme on le comprendra mieux plus loin, une action de poussée tendant à soulever la couche souple vers la partie ajourée de la surface d'appui.
- Selon un autre mode de mise en oeuvre qui, de préférence, est combiné au précédent, l'on utilise une aiguille possédant une extrémité munie d'au moins une pointe et, en amont de cette dernière, d'un arrêtoir adapté pour venir en butée contre la couche souple ; cet arrêtoir assure ou accroît considérablement l'action de poussée sur le tissu de la couche supérieure et engendre ou facilite notablement la formation de l'ondulation dans le tissu. On peut notamment utiliser une aiguille possédant à son extrémité deux pointes séparées : l'arrêtoir est alors formé par la partie de l'aiguille située entre les bases desdites pointes.
- Ainsi, le procédé de l'invention conduit à former une ondulation de là couche à saisir à l'intérieur de la partie ajourée de la surface d'appui, et à piquer cette ondulation à la manière d'un point de couture, en traversant la couche ; le tissu est emprisonné par l'aiguille sur toute son épaisseur et se trouve, en fin de mouvement de l'aiguille, pincé au niveau de son ondulation entre ladite aiguille et la surface d'appui. De la sorte, la préhension qui s'effectue par toutes les fibres avec pincement d'une petite portion du tissu, est extrêmement ferme et les expérimentations ont montré que les risques de détachement étaient négligeables même dans le cas des couches de tissu les plus fines.
- De plus, comme on le comprendra mieux plus loin, la préhension du tissu par piqûre et pincement d'une ondulation formée sur celui-ci est compatible avec un déplacement de l'aiguille (par rapport à la surface d'appui) tel que la trajectoire de son extrémité soit très aplatie au niveau de sa portion de rebroussement (Tr) ; il est facile dans ces conditions d'ajuster la hauteur de ce déplacement de sorte qu'une seule couche ou qu'un nombre déterminé de couches soit saisi.
- Dans le cas préférentiel de l'utilisation d'une aiguille à arrêtoir, celle-ci est avantageusement associée à des moyens élastiques tendant à l'écarter de la surface d'appui, ladite aiguille étant montée de façon à pouvoir se retracter sur une faible course vers la surface d'appui. De la sorte, il n'est pas nécessaire d'opérer un réglage très précis du mouvement de l'aiguille ; en effet lorsque l'arrêtoir de l'aiguille vient en appui contre le tissu, la faculté de rétraction de celle-ci limite de façon automatique la hauteur de déplacement de la pointe d'aiguille : il est ainsi possible d'obtenir sans difficulté, même dans le cas de couches très minces, un déplacement d'aiguille tel que, après pénétration, la portion de rebroussement (Tr) de la trajectoire (T) soit située à une distance de la surface d'appui, inférieure ou égale à l'épaisseur de la couche à saisir ou des couches à saisir. On évite ainsi de saisir accidentellement les couches inférieures.
- Le procédé de l'invention peut en particulier être mis en oeuvre selon les modalités suivantes :
- . le déplacement de l'aiguille par rapport à la surface d'appui est réalisé par un mouvement de rotation de ladite aiguille autour d'un axe, lequel est décalé transversalement par rapport au centre de courbure de l'aiguille dans le cas d'une aiguille courbe ; cet axe, situé à l'opposé des couches souples par rapport au plan de la surface d'appui, est lui-même animé d'un mouvement relatif de translation par rapport à la surface d'appui qui tend à le rapprocher de ce plan,
- . l'on applique la surface d'appui sur la couche souple supérieure de l'empilage par un mouvement relatif de rapprochement dudit empilage et de ladite surface d'appui, mouvement réalisé de sorte que, après contact, la pression de la surface d'appui sur l'empilage soit sensiblement constante et assez faible pour ne pas comprimer sensiblement la ou les couches souples,
- . à la fin de la portion finale (Tf) du déplacement de l'aiguille, on bloque cette dernière par rapport à la surface d'appui et on la garde bloquée pendant le mouvement relatif d'écartement entre l'empilage et l'ensemble aiguille/surface d'appui.
- La préhension du tissu effectuée dans les conditions précédemment décrites fournit une fermeté et une sécurité de maintien, qui facilitent considérablement le décollage des couches inférieures.
- Il est en particulier possible, une fois la ou les couches saisies, de déplacer l'ensemble aiguille/surface d'appui (contre laquelle est fermement maintenue la ou les couches saisies) suivant plusieurs mouvements rapides d'aller-retour selon une direction sensiblement parallèle au plan de la surface d'appui. Ces mouvements rompent les forces d'adhérence des couches saisies par rapport à la couche immédiatement voisine laquelle reste collée contre les autres couches de l'empilage.
- Il est également possible, et ce processus peut être combiné au précédent, de souffler de l'air au-dessus de la couche souple supérieure dans le sens tendant à écarter celle-ci du plan de la surface d'appui. Cet air insufflé en dehors des zones saisies a tendance à conférer à la couche saisie la forme d'une cuvette venant appuyer par son fond sur les couches inférieures ce qui permet ou favorise le décollage. De plus, en particulier dans le cas de couches très minces, l'air traverse la ou les couches saisies et établit une contre-pression de décollage sur les couches inférieures.
- Il est à noter que, compte-tenu du maintien très ferme de la ou des couches saisies, cette insufflation d'air est réalisée par de simples buses disposées au-dessus des couches, sans qu'il soit nécessaire de recourir à des aiguilles creuses comme dans le cas du procédé à aiguilles croisées.
- Après le mouvement relatif d'écartement de la couche saisie par rapport à l'empilage, le décrochage de cette couche est obtenu sans difficulté, en faisant subir à chaque aiguille un déplacement inverse par rapport à sa surface d'appui, de façon à ramener chacune desdites aiguilles dans sa position initiale en retrait par rapport à la surface d'appui. La ou les couches qui ne sont alors plus maintenues s'écartent par gravité des surfaces d'appui pour tomber à l'emplacement désiré. Le procédé de l'invention n'est ainsi pas soumis aux difficultés de décrochage que rencontrent les préhenseurs adhésifs et les préhenseurs à bandes accrochantes.
- L'invention s'étend à des moyens de mise en oeuvre du procédé sus-évoqué, comprenant au moins une tête dotée d'une surface d'appui pourvue d'une partie ajourée, une aiguille associée à ladite tête et mobile par rapport à cette dernière et des moyens de guidage cinématique de chaque aiguille par rapport à la tête correspondante, imposant à l'extrémité d'aiguille une trajectoire (T) (par rapport à la surface d'appui prise comme référence) possédant une portion initiale (Ti), une portion de rebroussement (Tr) et une portion finale (Tf) telles que définies précédemment, afin de présenter la forme d'un C à concavité orientée vers la surface d'appui de la tête.
- Selon une caractéristique de l'invention, les moyens de guidage cinématique sont adaptés pour déplacer l'aiguille correspondante selon un mouvement tel que la direction de l'extrémité de l'aiguille soit distincte de la tangente à la trajectoire (T) au moins sur la portion initiale (Ti) et la portion de rebroussement (Tr) de cette trajectoire.
- Selon une'autre caractéristique préférentiellement combinée à la précédente, l'aiguille possède une extrémité munie d'au moins une pointe et, en amont de cette dernière, d'un arrêtoir adapté pour venir en butée contre la couche souple ; en particulier ladite aiguille comporte avantageusement deux pointes séparées, l'arrêtoir étant formé par la partie située entre les bases desdites pointes.
- Selon d'autres caractéristiques de i l'invention, le dispositif est réalisé de sorte que :
- . chaque tête possède une fine rainure, d'épaisseur légèrement supérieure à celle de l'aiguille, s'étendant dans un plan sensiblement perpendiculaire à la surface d'appui et coupant la partie ajourée de la tête,
- . les moyens de guidage cinématique sont adaptés pour imposer à l'aiguille une position initiale entièrement en retrait dans ladite rainure et une position finale en fin de mouvement, dans laquelle au moins la pointe de ladite aiguille est en retrait dans ladite rainure,
- . lesdits moyens de guidage cinématique sont adaptés de sorte que la portion finale (Tf) de la trajectoire de la pointe d'aiguille coupe le plan de la surface d'appui au niveau de ladite partie ajourée.
- Dans un mode de réalisation préférentiel, les moyens de guidage cinématique de chaque aiguille comprennent :
- . une biellette articulée, adaptée pour porter l'aiguille de sorte que, dans le cas préférentiel d'une aiguille courbe, la concavité de celle-ci soit orientée dans le même sens que la trajectoire (T),
- . un axe d'articulation de ladite biellette, porté par un support de façon que ledit axe soit décalé transversalement par rapport à la tête et dans le cas préférentiel d'une aiguille courbe soit situé du côté de la concavité de l'aiguille et décalé par rapport au centre de courbure de celle-ci, .
- . des moyens de guidage en translation adaptés pour autoriser un mouvement relatif de translation entre le support de l'axe d'articulation et la tête,
- . une lumière de guidage de l'aiguille ménagée dans un élément solidaire de la tête, ladite lumière étant traversée par l'aiguille et agencée de façon à imposer à celle-ci son déplacement selon la trajectoire (T) lorsque la tête et l'axe sont soumis au mouvement relatif de translation sus-évoqué,
- . des moyens élastiques associés à la biellette porte-aiguille de façon à solliciter celle-ci dans le sens de son écartement par rapport à la tête vers une position extrême de butée.
- L'invention s'étend enfin à une machine pour la préhension et le transfert de couches souples, par unité ou par nombre déterminé ; ladite machine comprend essentiellement :
- . au moins un support d'empilage mobile,
- . un dispositif de préhension du type précédemment décrit, situé au-dessus dudit support d'empilage avec sa ou ses surfaces d'appui situées en regard dudit support, et,
- . des moyens d'entraînement du support d'empilage dans un mouvément ascendant vers le dispositif de préhension ou dans un mouvement descendant.
- D'autres caractéristiques, buts et avantages de l'invention se dégageront de la description qui suit en référence aux dessins annexés, lesquels en présentent à titre d'exemple non limitatif un mode de réalisation préférentiel ; sur ces dessins qui font partie intégrante de la présente description :
- . la figure 1 est une vue de face partiellement coupée par un plan vertical AA', d'un dispositif de préhension conforme à l'invention,
- . la figure 2 en est une vue de côté selon la flèche V,
- . les figures 3 et 4 en sont des coupes de détail respectivement selon BB' et CC',
- . les figures 5 et 6 sont des schémas montrant la tête du dispositif et son aiguille respectivement dans une position intermédiaire d'accrochage d'une couche et dans la position finale d'accrochage,
- . les figures 7a, 7b, 7c, 7d, 7e, 7f et 7g sont des schémas explicatifs à échelle très dilatée, montrant diverses phases de fonctionnement du dispositif,
- . la figure 8 schématise en perspective une machine de préhension et de transfert conforme à l'invention, en cours de-fonctionnement,
- . la figure 9 représente en variante, à échelle dilatée, une aiguille à deux pointes, susceptible d'équiper le dispositif notamment dans le cas de couches très minces,
- . les figures lOa, lOb et 10c sont des schémas explicatifs à échelle très dilatée dans le cas , d'une utilisation d'une aiguille à deux pointes, telle que représentée à la figure 9.
- Le dispositif de préhension représenté à titre d'exemple aux figures 1 à 4 comprend un châssis 1 qui porte autour d'une région centrale -la- plusieurs ensembles 2 dont la structure est décrite en détail ci-après. Le nombre d'ensemble 2 et leur répartition dépendent de la forme et des dimensions des pièces textiles à saisir (que l'on désignera ci-après par "pièces de tissu" quelle que soit leur texture tricotée, tissée ou autre). Par exemple, pour de petites pièces s'insérant dans un trapèze, destinées notamment à la fabrication de slip, ces ensembles peuvent être au nombre de quatre, deux à deux opposés, de façon à saisir chaque pièce au voisinage d'un angle.
- Comme on le verra plus loin, le châssis 1 peut être associé à des moyens de transfert, permettant de l'entraîner entre plusieurs emplacements où les pièces sont à saisir ou à déposer.
- Dans sa région centrale, le châssis 1 est équipé de moyens de soufflage d'air selon une direction sensiblement verticale (ou une direction sécante par rapport au plan horizontal). Ces moyens comprennent un support 3 orienté vers le bas et percé à son extrémité d'un canal 4 auquel est raccordé un conduit souple 5 d'arrivée d'air; l'air débouche du canal 4 par un orifice 4a orienté vers le bas.
- Chaque ensemble 2 comprend une platine 6 positionnée dans un plan à peu près vertical ; cette platine est articulée par deux vis pointeaux telles que 7 sur deux pattes du châssis 1 de façon à pouvoir subir par rapport à ce châssis des mouvements de basculement de faible amplitude , autour d'un axe horizontal passant par les vis 7.
- La platine 6 est associée à des moyens d'entraînement adaptés pour l'entraîner suivant des mouvements rapides d'aller-retour, en rotation autour des vis 7.
- En l'exemple, ces moyens sont constitués, d'une part, par un vérin à simple effet 8 ayant une tige mobile en saillie 8a qui vient en appui contre la partie inférieure de la platine 6, d'autre part, par un ressort de rappel 9 agissant sur la partie supérieure de ladite platine. Des supports 10 et 11 solidaires du châssis 1 permettent le montage de ces moyens en positions appropriées.
- La platine 6 supporte le corps 12a d'un vérin pneumatique à double effet 12, par l'entremise d'une patte 13 solidaire de ladite platine et formant une avancée par rapport au châssis 1. Le corps 12a du vérin est fixé sur la patte 13 comme le représentent les figures 1 et 2, de sorte que la tige mobile 12b dudit vérin soit dirigée vers le bas en position sensiblement verticale.
- Le vérin 12 est associé à un capteur de proximité 26 de type connu en soi (en particulier magnétique) qui détecte la position haute de son piston et délivre alors un signal de commande, entraînant le blocage de celui-ci dans cette position.
- Par ailleurs, en partie basse une tête de préhension 14 est vissée sur l'extrémité de la tige 12b du vérin pneumatique l2.
- Cette tête est formée par une portion de cylindre à base inférieure plane horizontale 14a, appelée à jouer le rôle de surface d'appui pour le tissu à saisir. Ladite tête est partiellement fendue, par une fine rainure 15 d'épaisseur légèrement supérieure à celle d'une aiguille de piqûre de type classique ; cette rainure s'étend dans un plan (vertical) sensiblement perpendiculaire à celui de la surface d'appui (horizontal) et débouche suivant un diamètre de ladite surface d'appui.
- En outre, la tête 14 possède une partie ajourée 16, en l'exemple de section circulaire, qui débouche également sur la surface d'appui 14a et s'étend de part et d'autre du plan contenant la rainure 15. (En l'exemple, cette partie ajourée 16 est formée par le prolongement d'un trou taraudé qui permet de visser la tête 14 sur la tige de vérin 12b).
- De plus, la tête 14 porte un doigt 27 qui glisse dans une échancrure appropriée 6a de la platine 6, afin d'éviter une rotation de ladite tête sur elle-même (autour de son axe vertical) et d'assurer un guidage de celle-ci au cours de son mouvement de translation verticale.
- Par ailleurs, la platine 6 porte un support 17, qui est assujetti sur celle-ci dans une position décalée transversalement par rapport à la tête 14 ; ce support est assujetti sur la platine par l'entremise d'un goujon 18 et d'une entretoise tubulaire 19, qui permettent de lui assigner une position relative préréglable par rapport à ladite platine.
- Ce support 17 porte un axe d'articulation 20 autour duquel peut pivoter une biellette 21 ; cet axe 20 décalé transversalement par rapport à l'axe de la tête 14 est situé au-dessus de la surface d'appui 14a.
- Des moyens élastiques sont associés à la biellette 21 et agencés pour solliciter celle-ci dans le sens de son écartement par rapport à la tête, vers une position extrême où elle bute contre le support 17 (position de la figure 1). En l'exemple, ces moyens élastiques sont constitués par une extrémité 22a d'un ressort 22, qui vient en appui sur la biellette 21 ; ce ressort est enroulé autour de l'entretoise tubulaire 19 et son autre extrémité 22b est bloquée dans un perçage de la platine 6.
- De plus, la biellette 21 est percée d'une lumière pour le passage et la fixation d'une aiguille de forme incurvée 23. Cette aiguille, du type aiguille classique de piqûre, comporte à l'opposé de sa pointe 23a, un talon 23b qui est logé dans la lumière sus-évoquée de la biellette 21 et bloqué en position préréglable par une vis pression 24.
- Les moyens de positionnement de l'aiguille (entretoise 19, support 17, biellette 21 et lumière de fixation du talon 23b) sont agencés de façon que (aux épaisseurs près) ladite aiguille soit située dans le plan de la rainure 15 de la tête et puisse se déplacer dans ce plan par rapport à la tête, par rotation de la biellette 21 autour de son axe 20 ; la concavité de ladite aiguille est orientée vers le haut et son centre de courbure est situé entre l'axe d'articulation 20 et l'axe vertical de la tête, dans une position plus proche de cet axe vertical de façon à être très fortement décalé par rapport à l'axe 20.
- En outre, l'aiguille 23 traverse une lumière de guidage 25a ménagée dans un élément solidaire de la tête (en l'exemple une plaquette 25 fixée en bordure de celle-ci en position préréglable). Cette lumière de guidage 25a et les moyens de positionnement déjà cités imposent à chaque instant la position relative de l'aiguille par rapport à la tête et sont ajustés de façon à lui conférer les mouvements qui sont détaillés ci-après.
- Lorsque sous l'effet d'une poussée verticale, la tête 14 monte vers sa position haute escamotée, l'aiguille vient en contact avec le bord inférieur de la lumière de guidage 25a qui l'amène à pivoter autour de l'axe 20. Le déplacement relatif de l'aiguille par rapport à la tête est donc la combinaison d'un mouvement de rotation autour de l'axe 20 et d'un mouvement de translation verticale. Les figures 5 et 6 schématisent respectivement une position intermédiaire de l'aiguille et de sa biellette par rapport à la tête 14 et la position finale d'accrochage du tissu.
- La combinaison des mouvements sus-évoqués conduit la pointe d'aiguille 23a à se déplacer sur une trajectoire T telle que schématisée à la figure 7b. Cette trajectoire de la pointe d'aiguille 23a est considérée par rapport à la tête, c'est-à-dire en prenant cette tête 14 comme référence.
- La trajectoire T, telle qu'elle est imposée à la pointe d'aiguille par les moyens de guidage cinématique décrits, présente la forme d'un C à concavité dirigée vers le haut ; elle est composée successivement :
- . d'une portion initiale Ti correspondant à la descente de l'aiguille vers le tissu (en déplacement relatif) et à sa pénétration,
- . d'une portion de rebroussement Tr au cours de laquelle l'angle de pénétration« passe d'une valeur positive à une valeur négative,
- . d'une portion finale Tf au cours de laquelle la pointe d'aiguille remonte vers la surface d'appui 14a de la tête jusqu'à couper celle-ci au niveau de la portion ajourée 16 et à venir en retrait dans la rainure 15 de l'autre côté de l'axe vertical` de la tête.
- Dans toutes les positions, l'aiguille se trouve au-dessus de la trajectoire T : la direction de sa pointe (tangente au niveau de la pointe) est sitée au-dessus de la tangente à la trajectoire et fait un angle avec cette dernière de l'ordre de quelques degrés à 20°.
- Les schémas des figures 7a à 7g illustrent le déplacement relatif de l'aiguille par rapport à la tête 14.
- L'aiguille 23 est positionnée de façon à être située initialement en retrait dans la rainure 15 comme le représente la figure 7a. La tête est en position basse et le vérin 12 qui la porte est à l'air libre ce qui laisse la tête libre de remonter avec des forces de frottement constantes et faibles. La biellette 21 est en position de butée extrême et l'aiguille est au contact du bord supérieur de la lumière de guidage 25a.
- Dans une première phase, l'empilage symbolisé en E sur les schémas, est amené à se déplacer vers le haut selon les flèches F de la figure 7a, jusqu'à ce que sa couche supérieure S vienne au contact de la surface d'appui 14a de la tête.
- A cet instant, celle-ci est soulevée et a tendance à s'escamoter vers le haut sous la poussée de l'empilage ; la pression de la surface d'appui sur l'empilage est sensiblement constante et assez faible pour ne pas comprimer sensiblement les couches et notamment la couche supérieure (du fait des forces de frottement constantes et de faible valeur du vérin 12).
- Au début de l'escamotage de la tête, l'aiguille possède par rapport à ladite tête un mouvement relatif vertical vers le bas jusqu'à venir en appui contre le bord inférieur de la lumière de guidage 25a : sa pointe commence alors à se déplacer sur la portion Ti de la trajectoire jusqu'à venir au contact de la couche S comme le schématise la figure 7b. Dans cette phase du début de mouvement, le ressort 22 confère une bonne souplesse au déplacement de l'aiguille et conditionne une pression de pénétration de l'aiguille sensiblement constante.
- A l'instant de pénétration de l'aiguille dans le tissu, l'angle α de pénétration (c'est-à-dire l'angle défini par la.direction de l'extrémité de l'aiguille et le plan du tissu) est compris entre environ 15 et 35°, ce qui garantit une pénétration correcte de l'extrémité d'aiguille à travers les fibres du tissu.
- Cet angle de pénétration 0( est dif- térent de l'angle (3 que forme au même point la tangente à la trajectoire Ti (α > β ), du fait que le déplacement de la pointe n'est pas constitué par une rotation autour du centre de courbure de l'aiguille ; il s'ensuit que le mouvement de l'aiguille n'est pas limité à une composante en rotation, mais comporte une composante en translation constituée par un glissement vers l'axe de la tête 14, glissement qui provoque une poussée sur le tissu en direction de cet axe. Dans le cas d'une aiguille sans arrêtoir, l'angle β que forme la tangente à la trajectoire T avec la couche au point de pénétration est de préférence sensiblement compris entre 3° et 15°, ce qui permet d'assurer dès le début de la pénétration une poussée efficace sur le tissu pour former l'ondulation (dans le cas d'une aiguille à arrêtoir, la valeur de cet angle est moins essentielle, puisque, comme on le verra plus loin, la poussée exercée sur le tissu par l'arrêtoir est extrêmement efficace et suffisante à elle-seule).
- Le mouvement progressif d'escamotage de la tête se poursuit au fur et à mesure de la montée de l'empilage. La pointe de l'aiguille ayant pénétré dans le tissu se déplace sur la portion initiale Ti de la trajectoire, puis sur la portion de rebroussement Tr (figure 7c) ; le tissu repoussé au cours de ce mouvement dans le sens de la flèche P forme une ondulation de hauteur croissante dans la partie ajourée 16 de la tête.
- Si une seule couche de tissu est à saisir, les moyens de maintien et de guidage de l'aiguille sont réglés de sorte que la portion de rebroussement Tr de la trajectoire soit située à une distance de la surface d'appui 14a, inférieure ou égale à l'épaisseur d'une couche.
- Si -n- couches sont à saisir, ce réglage est effectué de sorte que ladite portion de rebroussement Tr soit située dans la couche la plus basse à saisir, c'est-à-dire à une distance supérieure à (n - 1) e et inférieure ou égale à ne (où e est l'épaisseur d'une couche).
- Lorsque la pointe d`aiguillé pâr- vient à la fin de la portion de rebroussement Tr (figure 7d), l'angle de pénétration s'inverse et, du fait de l'ondulation du tissu, la pointe ressort sur la face inférieure de la couche S sans risque d'accrocher la couche du dessous (puisqu'elle demeure toujours au-dessus du niveau de celle-ci).
- Le soulèvement de l'empilage E se poursuit de même que le mouvement d'escamotage vers le haut de la tête (figure 7e) ; la pointe de l'aiguille décrit alors la portion finale Tf de la trajectoire, qui remonte par rapport à la surface d'appui et coupe le plan de cette surface au niveau de la partie ajourée 16. La pointe d'aiguille qui est sortie du tissu sur la face inférieure de la couche S pénètre à nouveau dans celui-ci au niveau de l'ondulation. En outre, l'ensemble de l'aiguille a tendance à s'effacer vers le haut dans la rainure 15 de la tête.
- La figure 7f schématise la position finale de l'aiguille lorsque sa pointe atteint l'extrémité de la portion Tf de la trajectoire. Dans cette position, la pointe d'aiguille est positionnée en retrait dans la rainure 15 de la tête ; dans l'exemple représenté, l'aiguille est venue entièrement en retrait dans cette rainure. Le tissu piqué de part en part, en deux emplacements, est parfaitement bloqué par l'aiguille et la surface d'appui sans pouvoir glisser et se détacher.
- Dans cette position, le capteur de proximité 26 commande l'alimentation pneumatique du vérin 12, qui bloque la tête en position haute escamotée. Le tissu fermement maintenu est verrouillé dans cet état et ne peut se détacher quels que soient les mouvements imprimés à la tête et les sollicitations exercées sur celui-ci.
- L'empilage E est ensuite amené à redescendre et simultanément le vérin 8 est soumis à plusieurs impulsions pneumatiques qui font subir à la platine et donc à l'ensemble aiguille/tête, des mouvements rapides d'aller-retour selon une direction sensiblement parallèle au plan de la surface d'appui. En outre, de l'air est insufflé par le canal 4 dont l'orifice 4a se trouve au voisinage immédiat de la couche S lorsque la tête 14 est entièrement escamotée en position haute.
- Ces actions assurent un bêtonnageextrêmement"efficace de la couche S par rapport à la couche S' située immédiatement au-dessous de celle-ci. Il est à noter que le décollage est obtenu de façon très sûre même dans le cas de couches ayant une forte tendance à adhérer entre elles : ceci est dû à l'efficacité des actions de décollage ci-dessus décrites, mais aussi au fait que des forces d'adhérences importantes se développent alors entre l'empilage et la couche non accrochée S', forces qui ont tendance à retenir cette couche sur l'empilage.
- Une fois la couche S séparée de l'empilage, les mouvements du vérin 8 et l'insufflation d'air sont arrêtés et le dispositif de préhension est déplacé vers l'emplacement désiré.
- Le vérin pneumatique 12 est alors commandé en sens inverse pour conditionner la descente de la tête 14 par rapport à la platine 6. L'aiguille 23 subit alors un déplacement inverse et libère la couche de tissu (figure 7g). Il est à noter que la présence du ressort 22 permet à ce mouvement de s'effectuer avec toute la souplesse nécessaire. En fin de course, l'aiguille revient dans sa position initiale en retrait par rapport à la surface d'appui.
- Par ailleurs, la figure 8 représente une machine de préhension et de transfert de couches, comprenant un dispositif du type ci-dessus décrit, équipé de quatre ensembles de préhension 2.
- Cette machine comporte un support d'empilage mobile 28 (ou plusieurs supports), situé au-dessous et en regard d'un des emplacements où le dispositif de préhension peut venir se positionner. Ce support d'empilage est associé à un vérin 29 permettant de le soulever vers le dispositif de préhension ou de le redescendre.
- Le dispositif de préhension est porté par des moyens de transfert adaptés pour pouvoir le déplacer entre une ou des position(s) située(s) en regard du ou des support(s) d'empilage 28 et une ou plusieurs autres positions situées au-dessus d'emplacements où les couches sont à déposer. En l'exemple représenté, ces moyens sont schématisés par un chariot 30 mobile le long de rails de guidage 31 et un vérin d'entraînement dont on aperçoit la tige mobile en 32 ; 18dispositif de préhension est suspendu au chariot 30.
- L'automatisation des opérations de préhension et de transfert peut être aisément obtenue en prévoyant des moyens de commande adaptés pour engendrer le déroulement du cycle suivant : soulèvement du support d'empilage 28 vers le dispositif de préhension jusqu'au contact de celui-ci en vue de produire la phase d'escamotage de ses têtes 14, abaissement dudit support avec mouvements rapides d'aller- retour des platines 6 par rapport au châssis 1 et soufflage d'air, transfert du dispositif de préhension vers une autre position, entraînement des têtes 14 pour produire la phase retour des aiguilles 23, retour du dispositif de préhension vers le support d'empilage précité ou un autre support d'empilage.
- Bien entendu, d'autres moyens de transfert peuvent être prévus. De même, tous les mouvements indiqués sont des mouvements relatifs d'organes les uns par rapport aux autres, et il est évident qu'il est équivalent de mouvoir un premier organe par rapport à un second ou, en sens inverse, le second par rapport au premier.
- De plus, dans la machine ci-dessus décrite, où plusieurs ensembles 2 sont montés sur le châssis 1 et sont répartis autour de sa région centrale en vue d'assurer une préhension des couches en plusieurs zones, il est préférable, lors de la phase de décollage, de synchroniser la commande des divers vérins 8 de façon à soumettre les têtes 14 à des mouvements synchronisés d'écartement ou de rapprochement par rapport à la région centrale.
- On réalise ainsi une série de tensions et détensions de la couche saisie S, qui augmentent encore l'efficacité de son décollage par rapport à la couche inférieure.
- A cet effet, chaque ensemble 2 est disposé de sorte que les tiges des vérins 8 présentent une direction radiale (direction s'étendant de l'ensemble 2 vers la région centrale du châssis) et que chaque aiguille soit située dans un plan tangentiel perpendiculaire à cette direction. Il est à noter qu'une telle position tangentielle des aiguilles est très favorable pour s'opposer à tout glissement radial du tissu lors des tensions et détensions de celui-ci
- Par ailleurs, le dispositif de préhension peut être équipé d'une aiguille 33 telle que schématisée à la figure 9. Cette aiguille présente la même forme générale que l'aiguille 23, mais possède à son extrémité deux pointes séparées 33a et 33b, qui en l'exemple sont formées par des becs à faces supérieures biaises. Ces pointes délimitent à leur base une face frontale 33c faisant fonction d'arrêtoir. Les pointes 33a et 33b peuvent avoir une longueur de l'ordre de 5/10 mm.
- Ce type d'aiguille combiné à la cinématique décrite précédemment donne un résultat remarquable sur le plan de l'efficacité de préhension, en particulier pour les couches très minces. On peut ainsi saisir avec un taux de réussite de 100 % des tissus d'épaisseur égale à 3/l0e de mm.
- Les schémas des figures 10a, 10b et 10c illustrent la préhension d'une couche au moyen d'une telle aiguille.
- L'aiguille pénètre d'abord dans la couche supérieure, de la même façon que l'aiguille 23 précédemment évoquée, et ce, jusqu'à ce que son arrêtoir 33c vienne au contact de la face supérieure de la couche (figure 10a).
- Sa pénétration est alors arrêtée par l'arrêtoir 33c, et elle repousse le tissu de façon extrêmement efficace vers la partie ajourée 16 de la tête ; il est à noter qu'une force de réaction s'exerce alors sur l'aiguille qui a tendance à se rétracter vers le haut en faisant jouer le ressort 22 (figure lOb). Ainsi, la trajectoire de la pointe d'aiguille est sensiblement plus aplatie que dans le cas précédent, et les risques de saisir accidentellement la-couche du dessous sont négligeables, malgré la très faible épaisseur du tissu.
- En fin de mouvement, l'ondulation nettement plus marquée que dans le cas précédent est fermement pincée entre l'arrêtoir 33c et le bord en regard de la partie ajourée 16 (figure 10c). La préhension du tissu est donc réalisée non seulement par piqûre du tissu, mais encore par pincement de l'ondulation : elle s'est avérée expérimentalement extrêmement sûre, quelle que soit l'épaisseur du tissu et sa texture.
- On a décrit ci-dessus un dispositif de préhension et une machine automatisée de transfert de pièces de tissu. L'invention s'étend bien entendu au cas d'un dispositif manuel comportant une seule tête (ou éventuellement un petit nombre de têtes) qui serait appliquée manuellement contre un empilage afin d'en séparer une ou plusieurs couches supérieures. Le vérin 12 est alors remplacé par des moyens de guidage en translation de la tête ; les moyens de guidage cinématique de l'aiguille restent analogues à ceux décrits, le blocage de la tête en position escamotée haute s'effectuant par un organe d'encliquetage, déverrouillable à la main ; un ressort de faible module peut être prévu pour assurer le retour de la tête vers le bas et le mouvement inverse de l'aiguille. Le maintien d'un tel dispositif s'effectue par une poignée solidaire de la platine.
- Un tel dispositif très simple facilite dans certains cas (matériaux présentant une forte tendance à adhérer) l'opération manuelle de saisie et séparation des couches.
paraissent incompatibles, en particulier lorsque l'on utilise un préhenseur à aiguille : ou bien l'on limite la pénétration de l'aiguille à une profondeur inférieure à l'épaisseur de la couche et, dans ce cas, la saisie de la couche, opérée sur une épaisseur très faible par quelques fibres seulement, est inefficace ; ou bien l'on amène l'aiguille à pénétrer plus profondément et l'on saisit les couches inférieures.
Claims (34)
ledit procédé étant caractérisé en ce que l'on réalise le mouvement de l'aiguille (23) de sorte que, au cours du déplacement de son extrémité le long de la portion initiale (Ti) et de la portion de rebroussement (Tr), ladite aiguille repousse la couche souple (S) vers la partie ajourée (16) et l'amène à former une ondulation dans ladite partie ajourée, la portion finale (Tf) de la trajectoire traversant ladite ondulation.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AT85200233T ATE32593T1 (de) | 1984-03-26 | 1985-02-21 | Verfahren und vorrichtung zum vereinzeln flexibler flaechengebilde, insbesondere textilwaren und maschine zum vereinzeln und zur fuehrung dieser flaechengebilde. |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8404804 | 1984-03-26 | ||
| FR8404804A FR2561631B1 (fr) | 1984-03-26 | 1984-03-26 | Procede et dispositif de prehension de couches souples en particulier textiles et machine pour la prehension et le transfert desdites couches |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0161010A1 true EP0161010A1 (fr) | 1985-11-13 |
| EP0161010B1 EP0161010B1 (fr) | 1988-02-24 |
Family
ID=9302540
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP85200233A Expired EP0161010B1 (fr) | 1984-03-26 | 1985-02-21 | Procédé et dispositif de préhension de couches souples en particulier textiles et machine pour la préhension et le transfert desdites couches |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US4635918A (fr) |
| EP (1) | EP0161010B1 (fr) |
| JP (1) | JPH0662222B2 (fr) |
| AR (1) | AR240161A1 (fr) |
| AT (1) | ATE32593T1 (fr) |
| AU (1) | AU576833B2 (fr) |
| BR (1) | BR8501264A (fr) |
| CA (1) | CA1253528A (fr) |
| DE (1) | DE3561652D1 (fr) |
| ES (1) | ES8701115A1 (fr) |
| FR (1) | FR2561631B1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0203802A2 (fr) * | 1985-05-28 | 1986-12-03 | University of Leeds Industrial Services Ltd. | Dispositif de manipulation de matériau textile |
| FR2594814A2 (fr) * | 1986-02-24 | 1987-08-28 | Rouleau Patrick | Dispositif perfectionne de prehension de couches souples, en particulier textiles |
| FR2631613A2 (fr) * | 1984-03-26 | 1989-11-24 | Rouleau Patrick | Dispositif perfectionne de prehension de couches souples, en particulier textiles |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2195618A (en) * | 1986-10-03 | 1988-04-13 | Rhoden Partners Ltd | Separating sheet material |
| FR2633267B1 (fr) * | 1988-06-27 | 1990-10-19 | Rouleau Patrick | Procede et dispositif pour superposer au moins deux couches souples, notamment un panneau de dos et un panneau de devant d'un article tel qu'un slip dans l'industrie textile et de la bonneterie |
| JP6368190B2 (ja) * | 2014-08-07 | 2018-08-01 | リンテック株式会社 | シート剥離装置 |
| JP6539808B1 (ja) * | 2019-01-29 | 2019-07-03 | 晶子 伊藤 | 両面テープ剥離紙剥がし具 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2002750A1 (de) * | 1970-01-22 | 1971-09-09 | Rodex Gmbh | Umsetzvorrichtung fuer Textilstoffzuschnitte |
| FR2132573A1 (en) * | 1971-04-09 | 1972-11-24 | Valton Sa | Handling device - for picking a fabric panel of the top of a pile |
| FR2304553A1 (fr) * | 1975-03-20 | 1976-10-15 | Nuovo Pignone Spa | Dispositif pour saisir automatiquement des pieces de tissu d'epaisseurs variables |
| DE2650861A1 (de) * | 1976-11-06 | 1978-05-11 | Meyer Fa Rudolf | Nadelbett zum festhalten von faserstoffmatten |
| FR2407881A1 (fr) * | 1977-11-04 | 1979-06-01 | Valton Sa | Dispositif de prehension et de deplacement de pieces tricotees |
| EP0039969A1 (fr) * | 1980-05-12 | 1981-11-18 | Byttebier, Gaspar A. H. | Procédé et dispositif pour séparer des feuilles flexibles d'une pile |
| DE3101705A1 (de) * | 1980-03-28 | 1982-01-28 | Veb Kombinat Textima, Ddr 9010 Karl-Marx-Stadt | Vorrichtung zum vereinzeln flexibler flaechengebilde |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3402833A (en) * | 1966-08-29 | 1968-09-24 | Owens Corning Fiberglass Corp | Method and apparatus for handling fibrous materials |
| US3813094A (en) * | 1972-06-06 | 1974-05-28 | Usm Corp | Mechanism for transfering flexible work pieces |
| DE2252941A1 (de) * | 1972-10-25 | 1974-05-02 | Dominikus Weise | Arbeitsgabel mit ausschiebeeinrichtung |
| FR2214292A5 (fr) * | 1973-01-16 | 1974-08-09 | Ctre Etud Tech Ind Habillement | |
| IT979264B (it) * | 1973-02-20 | 1974-09-30 | Nuovo Pignone Spa | Procedimento e dispositivo per la manipolazione di pezzi di tes suto durante lavorazioni automa tiche |
| JPS5430590A (en) * | 1977-08-11 | 1979-03-07 | Nippon Telegr & Teleph Corp <Ntt> | Method of and apparatus for cutting optical fibers |
| FR2482064B2 (fr) * | 1980-05-06 | 1986-09-05 | Hellin J P | Piqueur selectionneur de tissus ou matieres similaires |
| FR2468531A1 (fr) * | 1979-10-26 | 1981-05-08 | Hellin J P | Piqueur selectionneur de tissus ou matieres similaires |
| JPS57189942A (en) * | 1981-05-12 | 1982-11-22 | Bijttebier Gaspar A H | Method for separating sheet from heap of sheet and separator |
| SU1031868A1 (ru) * | 1982-03-04 | 1983-07-30 | Проектно-Конструкторско-Технологическое Бюро С Опытным Производством Министерства Промышленного Строительства Бсср | Грузозахватное устройство |
-
1984
- 1984-03-26 FR FR8404804A patent/FR2561631B1/fr not_active Expired
-
1985
- 1985-02-20 CA CA000475002A patent/CA1253528A/fr not_active Expired
- 1985-02-21 DE DE8585200233T patent/DE3561652D1/de not_active Expired
- 1985-02-21 EP EP85200233A patent/EP0161010B1/fr not_active Expired
- 1985-02-21 AT AT85200233T patent/ATE32593T1/de not_active IP Right Cessation
- 1985-03-11 ES ES541138A patent/ES8701115A1/es not_active Expired
- 1985-03-15 US US06/712,197 patent/US4635918A/en not_active Expired - Lifetime
- 1985-03-21 BR BR8501264A patent/BR8501264A/pt not_active IP Right Cessation
- 1985-03-22 AU AU40243/85A patent/AU576833B2/en not_active Ceased
- 1985-03-22 AR AR299838A patent/AR240161A1/es active
- 1985-03-25 JP JP60058625A patent/JPH0662222B2/ja not_active Expired - Lifetime
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2002750A1 (de) * | 1970-01-22 | 1971-09-09 | Rodex Gmbh | Umsetzvorrichtung fuer Textilstoffzuschnitte |
| FR2132573A1 (en) * | 1971-04-09 | 1972-11-24 | Valton Sa | Handling device - for picking a fabric panel of the top of a pile |
| FR2304553A1 (fr) * | 1975-03-20 | 1976-10-15 | Nuovo Pignone Spa | Dispositif pour saisir automatiquement des pieces de tissu d'epaisseurs variables |
| DE2650861A1 (de) * | 1976-11-06 | 1978-05-11 | Meyer Fa Rudolf | Nadelbett zum festhalten von faserstoffmatten |
| FR2407881A1 (fr) * | 1977-11-04 | 1979-06-01 | Valton Sa | Dispositif de prehension et de deplacement de pieces tricotees |
| DE3101705A1 (de) * | 1980-03-28 | 1982-01-28 | Veb Kombinat Textima, Ddr 9010 Karl-Marx-Stadt | Vorrichtung zum vereinzeln flexibler flaechengebilde |
| EP0039969A1 (fr) * | 1980-05-12 | 1981-11-18 | Byttebier, Gaspar A. H. | Procédé et dispositif pour séparer des feuilles flexibles d'une pile |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2631613A2 (fr) * | 1984-03-26 | 1989-11-24 | Rouleau Patrick | Dispositif perfectionne de prehension de couches souples, en particulier textiles |
| EP0203802A2 (fr) * | 1985-05-28 | 1986-12-03 | University of Leeds Industrial Services Ltd. | Dispositif de manipulation de matériau textile |
| EP0203802A3 (fr) * | 1985-05-28 | 1987-09-30 | University of Leeds Industrial Services Ltd. | Dispositif de manipulation de matériau textile |
| FR2594814A2 (fr) * | 1986-02-24 | 1987-08-28 | Rouleau Patrick | Dispositif perfectionne de prehension de couches souples, en particulier textiles |
| EP0240040A2 (fr) * | 1986-02-24 | 1987-10-07 | Patrick Rouleau | Dispositif perfectionne de préhension de couches souples, en particulier textiles |
| EP0240040A3 (fr) * | 1986-02-24 | 1989-03-15 | Patrick Rouleau | Dispositif perfectionne de préhension de couches souples, en particulier textiles |
Also Published As
| Publication number | Publication date |
|---|---|
| FR2561631B1 (fr) | 1986-08-29 |
| JPH0662222B2 (ja) | 1994-08-17 |
| AR240161A1 (es) | 1990-02-28 |
| ES541138A0 (es) | 1986-12-01 |
| US4635918A (en) | 1987-01-13 |
| ATE32593T1 (de) | 1988-03-15 |
| AU4024385A (en) | 1985-10-03 |
| DE3561652D1 (en) | 1988-03-31 |
| JPS60248538A (ja) | 1985-12-09 |
| FR2561631A1 (fr) | 1985-09-27 |
| AU576833B2 (en) | 1988-09-08 |
| EP0161010B1 (fr) | 1988-02-24 |
| BR8501264A (pt) | 1985-11-19 |
| ES8701115A1 (es) | 1986-12-01 |
| CA1253528A (fr) | 1989-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA1319081C (fr) | Machine pour la mise en oeuvre d'un procede de fabrication d'elements d'armature composites tisses en trois dimensions, et produit obtenu | |
| CA2147040C (fr) | Procede et machine pour la realisation d'une armature pour une piece de matiere composite | |
| EP0678610B1 (fr) | Procédé et machine pour la réalisation d'une armature en forme de plaque pour une pièce de matière composite | |
| EP0161010B1 (fr) | Procédé et dispositif de préhension de couches souples en particulier textiles et machine pour la préhension et le transfert desdites couches | |
| EP0678611A1 (fr) | Tête de piquage et machine pour la réalisation d'une armature en forme de plaque pour une pièce de matière composite | |
| EP1397545B1 (fr) | Machine d'aiguilletage circulaire munie d'un dispositif d'evacuation automatique de preformes | |
| EP0005664A1 (fr) | Procédé de transfert d'un matériau filiforme d'une broche d'enroulement à une autre et dispositif pour la mise en oeuvre du procédé | |
| FR2539118A1 (fr) | Procede et dispositif de saisie permettant de saisir et de separer notamment des produits textiles en nappe | |
| CH626857A5 (fr) | ||
| EP0269529B1 (fr) | Machine pour l'application automatique de feuilles auto-collantes sur des articles | |
| EP0337039A1 (fr) | Machine pour la manutention d'articles plats, notamment sacs ou sachets, à la sortie d'une machine de fabrication | |
| FR2599350A1 (fr) | Appareil et procede pour effectuer un travail sur un tissu enroule sur un rouleau debiteur | |
| FR2597290A1 (fr) | Procede et appareil de fabrication de faisceaux de conducteurs | |
| EP0285553B1 (fr) | Dispositif de commande des positions de tricotage des aiguilles d'un métier à tricoter | |
| EP0345858B1 (fr) | Procédé et dispositif pour appairer au moins deux couches souples, notamment un panneau de dos et un panneau de devant d'un article tel qu'un tee-shirt dans l'industrie textile et de la bonneterie | |
| EP0292490B1 (fr) | Procede et dispositif de prehension d'une piece souple sur une pile | |
| FR2550728A1 (fr) | Bloc laminaire | |
| EP0943723A1 (fr) | Dispositif de prélèvement d'échantillon sur un produit en bande ou en feuille | |
| WO2009109886A1 (fr) | Peigne de tirage pour machine a tricoter rectiligne | |
| BE1003829A6 (fr) | Procede et dispositif de fabrication d'un tapis a points noues. | |
| FR2594814A2 (fr) | Dispositif perfectionne de prehension de couches souples, en particulier textiles | |
| CH439037A (fr) | Machine copseuse | |
| EP0252844A1 (fr) | Machine automatique pour le traitement d'un matériau en bande et notamment pour la découpe d'un tel matériau | |
| EP0349041B1 (fr) | Procédé et dispositif pour superposer au moins deux couches souples, notamment un panneau de dos et un panneau de devant d'un article tel qu'un slip dans l'industrie textile et de la bonneterie | |
| WO1998002605A1 (fr) | Procede et dispositif pour effectuer la jonction entre un fil en cours de tricotage et un fil selectionne a tricoter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Designated state(s): AT BE CH DE GB IT LI LU NL SE |
|
| 17P | Request for examination filed |
Effective date: 19851218 |
|
| 17Q | First examination report despatched |
Effective date: 19861020 |
|
| R17C | First examination report despatched (corrected) |
Effective date: 19870305 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE GB IT LI LU NL SE |
|
| REF | Corresponds to: |
Ref document number: 32593 Country of ref document: AT Date of ref document: 19880315 Kind code of ref document: T |
|
| REF | Corresponds to: |
Ref document number: 3561652 Country of ref document: DE Date of ref document: 19880331 |
|
| ITF | It: translation for a ep patent filed |
Owner name: ORGANIZZAZIONE D'AGOSTINI |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| ITTA | It: last paid annual fee | ||
| EPTA | Lu: last paid annual fee | ||
| EAL | Se: european patent in force in sweden |
Ref document number: 85200233.6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 19970127 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 19970131 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19970212 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 19970227 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 19970228 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19970306 Year of fee payment: 13 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: LU Payment date: 19970408 Year of fee payment: 13 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980221 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980221 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980221 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980222 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980228 |
|
| BERE | Be: lapsed |
Owner name: TOURET JEAN-PIERRE Effective date: 19980228 Owner name: ROULEAU ALAIN Effective date: 19980228 Owner name: ROULEAU PATRICK Effective date: 19980228 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980901 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19980221 |
|
| EUG | Se: european patent has lapsed |
Ref document number: 85200233.6 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee |
Effective date: 19980901 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19981103 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20040213 Year of fee payment: 20 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20050220 Ref country code: CH Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20050220 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |