EP0080446A2 - Method of controlling an impact motor and an impact motor - Google Patents
Method of controlling an impact motor and an impact motor Download PDFInfo
- Publication number
- EP0080446A2 EP0080446A2 EP82850229A EP82850229A EP0080446A2 EP 0080446 A2 EP0080446 A2 EP 0080446A2 EP 82850229 A EP82850229 A EP 82850229A EP 82850229 A EP82850229 A EP 82850229A EP 0080446 A2 EP0080446 A2 EP 0080446A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- piston
- impact
- hammer piston
- wave energy
- shock waves
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034 method Methods 0.000 title claims description 7
- 230000035939 shock Effects 0.000 claims abstract description 29
- 230000003116 impacting effect Effects 0.000 claims description 2
- 238000013016 damping Methods 0.000 abstract description 25
- 239000011435 rock Substances 0.000 abstract description 18
- 230000006835 compression Effects 0.000 description 5
- 238000007906 compression Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 3
- 238000005553 drilling Methods 0.000 description 3
- 230000035515 penetration Effects 0.000 description 3
- 239000012530 fluid Substances 0.000 description 2
- 238000013022 venting Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000000737 periodic effect Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D17/00—Details of, or accessories for, portable power-driven percussive tools
- B25D17/24—Damping the reaction force
- B25D17/245—Damping the reaction force using a fluid
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B1/00—Percussion drilling
- E21B1/38—Hammer piston type, i.e. in which the tool bit or anvil is hit by an impulse member
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D9/00—Portable percussive tools with fluid-pressure drive, i.e. driven directly by fluids, e.g. having several percussive tool bits operated simultaneously
- B25D9/06—Means for driving the impulse member
- B25D9/12—Means for driving the impulse member comprising a built-in liquid motor, i.e. the tool being driven by hydraulic pressure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D9/00—Portable percussive tools with fluid-pressure drive, i.e. driven directly by fluids, e.g. having several percussive tool bits operated simultaneously
- B25D9/14—Control devices for the reciprocating piston
- B25D9/145—Control devices for the reciprocating piston for hydraulically actuated hammers having an accumulator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D9/00—Portable percussive tools with fluid-pressure drive, i.e. driven directly by fluids, e.g. having several percussive tool bits operated simultaneously
- B25D9/14—Control devices for the reciprocating piston
- B25D9/26—Control devices for adjusting the stroke of the piston or the force or frequency of impact thereof
Definitions
- This invention relates to a method of controlling an impact motor that comprises a reciprocating hammer piston that, when impacting upon an anvil, converts its kinetic energy to shock wave energy that propagates through an elongate tool, for example a tool in the form of a drill stem or chisel.
- the invention relates also to an impact motor of the kind described above which has an adjusting device for adjusting the impact velocity of the hammer piston.
- the hammer piston impacts at a constant impact energy per blow independently of the gradually varying condition of the drill bit and of changing rock properties.
- the impact motor can then for example be the impact motor of a rock drill or a jack hammer. This object is achieved by the features given in the characterizing parts of the claims.
- the kinetic energy of the hammer piston propagates in the form of a compression wave through the tool which can be a rock drill stem.
- the major portion of the part of the shock wave energy that is not utilized for the rock destruction is reflected as shock wave energy either ii. the form of compression waves or tensile waves. This energy may also be reflected partly as compression waves and partly as tensile waves.
- the reflected shock waves are sensed and the impact velocity is adjusted in response thereto so that the reflected shock wave energy will be small.
- the movement coupled to the reflected shock waves is sensed and the movement is minimized.
- the impact device shown in Fig 1 is a hydraulic rock drill, a hydraulic jack hammer or the like. It comprises a housing 11 forming a cylinder 12 in which a hammer piston 13 is reciprocable to impact upon an anvil element 14, for example a chisel, a rock drill stem or an adapter for a rock drill stem.
- a shoulder 15 on the anvil element takes support on a sleeve 16 on a damping piston 17 for damping the reflected compressive shock waves.
- the damping piston 17 is forced forwardly into its foremost position as shown by the hydraulic pressure in a cylinder chamber 18 that is constantly pressurized through a passage 19. The pressure acts on an annular piston surface 9 of the damping piston.
- the hammer piston 13 has two lands 20, 21 so that a front cylinder chamber 22, a rear cylinder chamber 23 and an intermediate cylinder chamber 24 are formed between the piston 13 and the cylinder 12.
- the piston 13 is driven forwardly by the pressure acting on its surface 25 and driven rearwardly by the pressure acting on its surface 26.
- a valve 27 is connected to an inlet 28 coupled to a source of high pressure hydraulic fluid and to an outlet 29 coupled to tank. Accumulators 30, 31 are coupled to the inlet 28 and the outlet 29.
- the intermediate cylinder chamber 24 is constantly connected to the outlet 29 by means of a passage 29a.
- the valve 27 is coupled to the rear cylinder chamber 23 by means of a supply passage 32 and to the front cylinder chamber 22 by means of a supply passage 33.
- the valve 27 has a valving spool 34 which in its illustrated position connects the rear cylinder chamber 23 to pressure and the front cylinder chamber 22 to tank.
- the spool 34 has cylindrical end portions 35, 36, the end faces of which have piston surfaces that are subject to the pressure in control passages 37, 42 that each are branched into four branches so that they each have four ports 38, 39, 40, 41 and 43, 44, 45, 46 respectively into the cylinder 12.
- a cylindrical bore 47 intersects all eight branches and a cylindrical pin 48 is slidable with a tight fit in the bore 47.
- This pin 48 has two recesses 49, 50. Integral with the pin 48 there is a control piston 55 that divides a cylinder into two cylinder chambers 56, 57 and a dash pot piston 58.
- Compressed air is supplied through a pressure regulator 59 to the two cylinder chambers 56, 57 via two passages 60, 61.
- the passage 61 contains a restriction 62.
- a passage 63 leads from the cylinder chamber 57 to a cylinder chamber 64 formed between the housing 11 and a land 65 on the damping piston 17.
- the front end face 66 of the land abuts against a shoulder 67 in the housing 11 to define the impact position of the anvil element 14.
- One or more passages 68 lead axially through the land 65 and they are closed when the damping piston 17 is forced forwardly into its normal positon as shown in Fig 1 but they are vented through a passage 69 to the atmosphere when the damping piston 17 is off the shoulder 67.
- the operation of the impact device of Fig 1 will now be described.
- the hammer piston 13 is shown in Fig 1 moving forwardly in its work stroke (to the left in Fig 1), and the valve spool 34 is then in its illustrated position.
- the control passage 42 will convey pressure to the control piston 36 so that the valve spool 34 is moved to the right in Fig 1.
- the valve spool 34 should prefereably finish its movement at the very moment the hammer piston 13 impacts upon the anvil 14.
- the pressure existing from the moment of impact in the front cylinder chamber 22 moves the hammer piston 13 rearwardly until the branch 40 of the control passage 37 is opended to the front pressure chamber 22.
- control passage 37 conveys pressure to the control piston 35 which moves the valve spool 34 back to its illustrated position so that the rear cylinder chamber 23 is again pressurized.
- the pressure in the rear cylinder chamber 23 retards the hammer piston 13 and accelerates it forwardly again so that the hammer piston 13 performs another work stroke.
- the valve spool 34 has annular surfaces 52, 53 and internal passages 51, 54 which hold the valve spool in position during the periods when the control pistons 35, 36 do not positively hold the piston.
- the annular surfaces52, 53 are smaller than the end faces of the pistons 35, 36.
- the port 40 of the control passage 37 and the port 45 of the control passage 42 are the ports that make the valve spool shift position.
- the other ports are inactivated.
- one pair of the three pairs of ports 38, 43; 39, 44 and 41, 46 respectively is selected to cooperate to control the valve.
- the first one of the ports 38-41 that is opened to the front cylinder chamber 22 during the return stroke of the hammer piston initiates the valve spool 34 to shift position.
- the operator pre-selects the stroke length of the hammer piston.
- the axial distances between the ports 43-46 are smaller than the corresponding distances between the ports 38-41.
- the axial positions of the ports 43-46 in the cylinder are such that for each stroke length the selected one of the ports 43-46 is uncovered a distance before the impact postion of the hammer piston, and the distance is such that the valve spool has just moved to its position for pressurizing the front pressure chamber when the hammer piston 13 impacts the anvil 14.
- the distances between the ports 43-46 are such that the selected port is uncovered the same period of time before impact occurs independently of which one of the four ports is selected.
- the damping piston 17 When there are no reflected compressive shock waves, the damping piston 17 will not rebounce and the passage 63 will be constantly blocked. Thus, there will be a pressure balance on the piston 55.
- the differential area of the piston 55 will move the piston to the left in Fig 1 and the stroke length. of the hammer piston will accordingly decrease until the damping piston 17 starts to rebounce.
- the periodic rebounce will cause air to leak through the passage 63 so that the pressure in the chamber 57 decreases and the piston will stop moving to the left in Fig l.
- the piston should be so balanced that it takes up a position in which the damping piston 17 rebounces only a little, which means that a slight amount of energy reflects as compression waves.
- the balance of the piston is defined by its differential area, the restriction 62, the supplied air pressure, and of course the damping piston 17.
- the dash-pot piston 58 slows down the movement of the damping piston 17, and makes the control more stable.
- the stroke length is automatically reduced so that the drill bit will not wear down unnecessarily fast. Then, the stroke length increases as the drill bit becomes worn.
- the stroke length is also automatically adjusted to varying rock properties and to the length of the drill stem when the drill stem is made up of extention rods.
- FIG 2 an alternative system for controlling the pin 48 is shown.
- a plunger piston 71 is fixed with the pin 48 and a passage 72 with a check valve 73 leads directly between the cylinder chamber 18 of the damping piston 17 and the cylinder chamber 74 of the plunger piston 71.
- the check valve 73 is by-passed by a passage 75 with a restriction 76.
- An annular land 77 between the pin 48 and the plunger piston 71 divides a wider cylinder into two cylinder chambers 78, 79.
- the cylinder chamber 78 is continuously drained through a passage 80 and the cylinder chamber 79 is continuously pressurized through a passage 81.
- the annular area in the cylinder chamber 79 should equal the plunger area.
- a spring 82 is arranged to bias the pin 48 to the left in Fig 2.
- the rebounces of the damping piston 17 result in pressure peaks in the chamber 18.
- the check valve 73 which is closed at the normal pressure level, opens for each peak and supplies a small amount of fluid to the plunger cylinder 74, and the plunger piston 71 will move the pin 48 to the right in the figure against the action of the spring so that the stroke length of the hammer piston 13 increases as described with reference to Fig 1.
- the spring 82 will force the plunger 71 and the pin 48 to the left in Fig 2 until the rebounces again tend to increase.
- the pin 48 will be controlled in response to the compressive shock waves as in the embodiment of Fig 1.
- the damping piston 17 is biassed forwardly into a defined normal position into which it returns or nearly returns before each impact provided that the feed force applied to the housing 11 is smaller than the force applied to the piston surface 9 of the damping piston.
- an hydraulic impact motor which has a valve 27 and a valve control system that accepts variation within certain limits of the position of the impact surface of the anvil at the instant of impact. Therefore, the damping piston 17 can be floating as shown in Fig 3.
- the pin 48 controls the valve control passage 37 only, it does not control the valve control passage 42.
- the pin 48 is controlled by compressed air of a controlled pressure in the same way as shown in Fig 1 but the venting of the passage 63 is different.
- the chamber 18 is supplied with compressed air of a controlled pressure from a supply passage 85 through a check valve 86 so that the air in the chamber 18 forms an air spring.
- a counter piston 87 has an annular piston surface 88 in a cylinder chamber 87 which is, in use, constantly pressurized by being connected to the supply passage 85.
- the piston surface 88 of the counter piston 87 must be substantially smaller than the piston surface 9 of the damping piston 17.
- the movement related to the reflected compressive shock waves only is sensed. Neither the primary compressive shock waves nor the reflected tensile shock waves will induce rebounces of the damping piston 17, which makes the system very simple.
- the movements of the drill stem can be sensed, for example by means of light emitter, a bundle of optic fibres and a photocell.
- the electric signal from the photocell can then be analyzed and processed to give a control signal for controlling a control pin 48 of the kind shown in the Figures or any other kind of means for adjusting the impact velocity of the hammer piston.
- the impact device shown in Figs 1, 2, or 3 is a rock drill, its front end can be as shown in Fig 4.
- the shoulder 15 of the anvil element 14 is the rear end surface 15 of a non-circular widened portion 98 of a drill stem adapter 14.
- the portion 98 engages with a chuck bushing 92 with an insert bushing 93 so that it rotates conjointly with the chuck bushing.
- the chuck bushing 92 is rotated by means of a non-illustrated rotation motor through a drive shaft 95 and a gearing 94.
- ports 38-41 with four respective passages that intersect the bore 47 and only four ports 43-46 with four respective passages that intersect the bore 47 are shown, it is advantageous and desirable that the discrete ports and their passages axially overlap one another in order to make the control substantially stepless.
- the ports and the respective passages can for example be arranged in two or three axial rows so that they axially overlap one another but still remain discrete.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Fluid Mechanics (AREA)
- Physics & Mathematics (AREA)
- Geology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Mining & Mineral Resources (AREA)
- Environmental & Geological Engineering (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geochemistry & Mineralogy (AREA)
- Automation & Control Theory (AREA)
- Earth Drilling (AREA)
- Percussive Tools And Related Accessories (AREA)
Abstract
In a rock drill, the feed force is transmitted from the housing 11 of the rock drill to the drill stem or drill stem adapter 14 via a damping piston 17. The damping piston 17 rebounces by the reflected compressive shock waves and the rebounce is sensed and used to control a control pin 48 which adjusts the stroke length of the hammer piston 13 so that the reflected shock wave energy is minimized.
Description
- This invention relates to a method of controlling an impact motor that comprises a reciprocating hammer piston that, when impacting upon an anvil, converts its kinetic energy to shock wave energy that propagates through an elongate tool, for example a tool in the form of a drill stem or chisel.
- The invention relates also to an impact motor of the kind described above which has an adjusting device for adjusting the impact velocity of the hammer piston.
- In rock drilling, it is known that an increased impact energy per blow results in an increased penetration rate up to a certain level. If the impact energy is increased over this level, the penetration rate increases very little whereas the drill bit wear increases considerably.
- It is also known in the art that a worn drill bit requires a higher impact energy than a new or newly sharpened drill bit in order to give the same penetration rate.
- Usually in a rock drill, the hammer piston impacts at a constant impact energy per blow independently of the gradually varying condition of the drill bit and of changing rock properties.
- It is an object of the invention to permit for control of the impact motor in order to utilize the impact energy more effectively. The impact motor can then for example be the impact motor of a rock drill or a jack hammer. This object is achieved by the features given in the characterizing parts of the claims.
- The kinetic energy of the hammer piston propagates in the form of a compression wave through the tool which can be a rock drill stem. The major portion of the part of the shock wave energy that is not utilized for the rock destruction is reflected as shock wave energy either ii. the form of compression waves or tensile waves. This energy may also be reflected partly as compression waves and partly as tensile waves.
- According to the invention, the reflected shock waves are sensed and the impact velocity is adjusted in response thereto so that the reflected shock wave energy will be small. Advantageously, the movement coupled to the reflected shock waves is sensed and the movement is minimized. It is particularly advantageous to sense the rebounce of an elastically yieldable element that is arranged to transmit a feed force to the tool and to adapt the impact velocity of the hammer piston so that the rebounce of the yieldable element will be samll but does not disappear. There should be a slight rebounce since it is the compression wave energy only that makes the element rebounce. The tensile wave energy does not affect the rebounce and if there is no rebounce at all the impact velocity may be accurate but it may also be too high.
- The invention will be described with reference to the accompanying drawings.
- Fig 1 is a longitudinal view of an impact motor according to the invention, e.g. the impact motor of a rock drill.
- Fig 2 is a longitudinal view of an impact motor according to the invention, e.g. the impact motor of a rock drill.
- Fig 3 is a longitudinal view of an impact motor according to the invention, e.g. the impact motor of a rock drill.
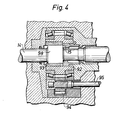
- Fig 4 is a longitudinal view of the front end of a rock drill which can be the front end of any one of the impact motors of Fig 1, Fig 2, or Fig 3 when they are adapted as rock drills.
- The impact device shown in Fig 1 is a hydraulic rock drill, a hydraulic jack hammer or the like. It comprises a
housing 11 forming acylinder 12 in which ahammer piston 13 is reciprocable to impact upon ananvil element 14, for example a chisel, a rock drill stem or an adapter for a rock drill stem. Ashoulder 15 on the anvil element takes support on asleeve 16 on adamping piston 17 for damping the reflected compressive shock waves. Thedamping piston 17 is forced forwardly into its foremost position as shown by the hydraulic pressure in acylinder chamber 18 that is constantly pressurized through apassage 19. The pressure acts on anannular piston surface 9 of the damping piston. Thehammer piston 13 has two lands 20, 21 so that afront cylinder chamber 22, arear cylinder chamber 23 and anintermediate cylinder chamber 24 are formed between thepiston 13 and thecylinder 12. Thepiston 13 is driven forwardly by the pressure acting on itssurface 25 and driven rearwardly by the pressure acting on itssurface 26. A valve 27 is connected to aninlet 28 coupled to a source of high pressure hydraulic fluid and to anoutlet 29 coupled to tank.Accumulators inlet 28 and theoutlet 29. Theintermediate cylinder chamber 24 is constantly connected to theoutlet 29 by means of apassage 29a. The valve 27 is coupled to therear cylinder chamber 23 by means of asupply passage 32 and to thefront cylinder chamber 22 by means of asupply passage 33. The valve 27 has avalving spool 34 which in its illustrated position connects therear cylinder chamber 23 to pressure and thefront cylinder chamber 22 to tank. Thespool 34 hascylindrical end portions control passages ports cylinder 12. A cylindrical bore 47 intersects all eight branches and acylindrical pin 48 is slidable with a tight fit in the bore 47. Thispin 48 has tworecesses pin 48 there is acontrol piston 55 that divides a cylinder into twocylinder chambers dash pot piston 58. - Compressed air is supplied through a
pressure regulator 59 to the twocylinder chambers passages passage 61 contains arestriction 62. - A
passage 63 leads from thecylinder chamber 57 to acylinder chamber 64 formed between thehousing 11 and aland 65 on thedamping piston 17. Thefront end face 66 of the land abuts against ashoulder 67 in thehousing 11 to define the impact position of theanvil element 14. One or more passages 68 lead axially through theland 65 and they are closed when thedamping piston 17 is forced forwardly into its normal positon as shown in Fig 1 but they are vented through a passage 69 to the atmosphere when thedamping piston 17 is off theshoulder 67. - The operation of the impact device of Fig 1 will now be described. The
hammer piston 13 is shown in Fig 1 moving forwardly in its work stroke (to the left in Fig 1), and thevalve spool 34 is then in its illustrated position. When the port 45 of thecontrol passage 42 is opened to therear cylinder chamber 23, thecontrol passage 42 will convey pressure to thecontrol piston 36 so that thevalve spool 34 is moved to the right in Fig 1. Thevalve spool 34 should prefereably finish its movement at the very moment thehammer piston 13 impacts upon theanvil 14. Thus, the pressure existing from the moment of impact in thefront cylinder chamber 22 moves thehammer piston 13 rearwardly until thebranch 40 of thecontrol passage 37 is opended to thefront pressure chamber 22. Then, thecontrol passage 37 conveys pressure to thecontrol piston 35 which moves thevalve spool 34 back to its illustrated position so that therear cylinder chamber 23 is again pressurized. The pressure in therear cylinder chamber 23 retards thehammer piston 13 and accelerates it forwardly again so that thehammer piston 13 performs another work stroke. - The
valve spool 34 hasannular surfaces internal passages 51, 54 which hold the valve spool in position during the periods when thecontrol pistons pistons - When the
pin 48 is in its illustrated position, theport 40 of thecontrol passage 37 and the port 45 of thecontrol passage 42 are the ports that make the valve spool shift position. The other ports are inactivated. In other positions of thepin 48 one pair of the three pairs of ports 38, 43; 39, 44 and 41, 46 respectively is selected to cooperate to control the valve. - The first one of the ports 38-41 that is opened to the
front cylinder chamber 22 during the return stroke of the hammer piston initiates thevalve spool 34 to shift position. Thus, by adjusting the axial position of the pin, the operator pre-selects the stroke length of the hammer piston. The axial distances between the ports 43-46 are smaller than the corresponding distances between the ports 38-41. The axial positions of the ports 43-46 in the cylinder are such that for each stroke length the selected one of the ports 43-46 is uncovered a distance before the impact postion of the hammer piston, and the distance is such that the valve spool has just moved to its position for pressurizing the front pressure chamber when thehammer piston 13 impacts theanvil 14. The distances between the ports 43-46 are such that the selected port is uncovered the same period of time before impact occurs independently of which one of the four ports is selected. - When there are no reflected compressive shock waves, the
damping piston 17 will not rebounce and thepassage 63 will be constantly blocked. Thus, there will be a pressure balance on thepiston 55. The differential area of thepiston 55 will move the piston to the left in Fig 1 and the stroke length. of the hammer piston will accordingly decrease until thedamping piston 17 starts to rebounce. The periodic rebounce will cause air to leak through thepassage 63 so that the pressure in thechamber 57 decreases and the piston will stop moving to the left in Fig l. The piston should be so balanced that it takes up a position in which the dampingpiston 17 rebounces only a little, which means that a slight amount of energy reflects as compression waves. The balance of the piston is defined by its differential area, therestriction 62, the supplied air pressure, and of course the dampingpiston 17. The dash-pot piston 58 slows down the movement of the dampingpiston 17, and makes the control more stable. - When the drill bit is new or newly regrinded, it needs less shock wave energy and the stroke length is automatically reduced so that the drill bit will not wear down unnecessarily fast. Then, the stroke length increases as the drill bit becomes worn. The stroke length is also automatically adjusted to varying rock properties and to the length of the drill stem when the drill stem is made up of extention rods.
- In Fig 2, an alternative system for controlling the
pin 48 is shown. A plunger piston 71 is fixed with thepin 48 and apassage 72 with acheck valve 73 leads directly between thecylinder chamber 18 of the dampingpiston 17 and thecylinder chamber 74 of the plunger piston 71. Thecheck valve 73 is by-passed by a passage 75 with a restriction 76. An annular land 77 between thepin 48 and the plunger piston 71 divides a wider cylinder into two cylinder chambers 78, 79. The cylinder chamber 78 is continuously drained through a passage 80 and the cylinder chamber 79 is continuously pressurized through apassage 81. In order to make the system insensitive to the pressure level of the hydraulic system, the annular area in the cylinder chamber 79 should equal the plunger area. Aspring 82 is arranged to bias thepin 48 to the left in Fig 2. - During drilling, the rebounces of the damping
piston 17 result in pressure peaks in thechamber 18. Thecheck valve 73 which is closed at the normal pressure level, opens for each peak and supplies a small amount of fluid to theplunger cylinder 74, and the plunger piston 71 will move thepin 48 to the right in the figure against the action of the spring so that the stroke length of thehammer piston 13 increases as described with reference to Fig 1. When the rebounces decrease, thespring 82 will force the plunger 71 and thepin 48 to the left in Fig 2 until the rebounces again tend to increase. Thus, thepin 48 will be controlled in response to the compressive shock waves as in the embodiment of Fig 1. - In the impact motors of Figs 1 and 2, the damping
piston 17 is biassed forwardly into a defined normal position into which it returns or nearly returns before each impact provided that the feed force applied to thehousing 11 is smaller than the force applied to thepiston surface 9 of the damping piston. - In Fig 3, an hydraulic impact motor is shown which has a valve 27 and a valve control system that accepts variation within certain limits of the position of the impact surface of the anvil at the instant of impact. Therefore, the damping
piston 17 can be floating as shown in Fig 3. Thepin 48 controls thevalve control passage 37 only, it does not control thevalve control passage 42. Thepin 48 is controlled by compressed air of a controlled pressure in the same way as shown in Fig 1 but the venting of thepassage 63 is different. Thechamber 18 is supplied with compressed air of a controlled pressure from asupply passage 85 through acheck valve 86 so that the air in thechamber 18 forms an air spring. Acounter piston 87 has anannular piston surface 88 in acylinder chamber 87 which is, in use, constantly pressurized by being connected to thesupply passage 85. Thepiston surface 88 of thecounter piston 87 must be substantially smaller than thepiston surface 9 of the dampingpiston 17. - When drilling is to be started, compressed air is first supplied to the
supply passages piston 17 moves to the left in Fig 3. When the feed force is supplied to thehousing 11 and the impact motor is started, thehousing 11 moves forwardly i.e. the dampingpiston 17 moves inwardly in thehousing 11 so that the air in thechamber 18 is compressed until the resultant force of the air spring force on thesurface 9 and the force on thesurface 88 balances the resultant force of the feed force and the internal recoil forces. - When the damping piston rebounces, the
counter piston 87 follows but since the acceleration of the rebounce is very high, there will temporary be agap 90 between the dampingpiston 17 andcounter piston 87. This periodical gap provides a leak passage through which thepassage 63 is vented to the atmosphere via aclearance 91 between theanvil 14 and thecounter piston 87. This venting of thepassage 63 controls the position of thepin 48 in the same way as described with reference to Fig 1. - In the embodiments described above, the movement related to the reflected compressive shock waves only is sensed. Neither the primary compressive shock waves nor the reflected tensile shock waves will induce rebounces of the damping
piston 17, which makes the system very simple. - As an alternative, the movements of the drill stem can be sensed, for example by means of light emitter, a bundle of optic fibres and a photocell. The electric signal from the photocell can then be analyzed and processed to give a control signal for controlling a
control pin 48 of the kind shown in the Figures or any other kind of means for adjusting the impact velocity of the hammer piston. Then, it is advantageous to compare the movements related to the reflected shock wave with the primary shock wave and to adjust the impact velocity in response to the quotient of the lengths of the movements. - If the impact device shown in Figs 1, 2, or 3 is a rock drill, its front end can be as shown in Fig 4. Then, the
shoulder 15 of theanvil element 14 is therear end surface 15 of a non-circular widenedportion 98 of adrill stem adapter 14. Theportion 98 engages with achuck bushing 92 with aninsert bushing 93 so that it rotates conjointly with the chuck bushing. Thechuck bushing 92 is rotated by means of a non-illustrated rotation motor through adrive shaft 95 and agearing 94. - Although, in the Figures, only four ports 38-41 with four respective passages that intersect the bore 47 and only four ports 43-46 with four respective passages that intersect the bore 47 are shown, it is advantageous and desirable that the discrete ports and their passages axially overlap one another in order to make the control substantially stepless. For this purpose the ports and the respective passages can for example be arranged in two or three axial rows so that they axially overlap one another but still remain discrete.
Claims (7)
1. Method of controlling an impact motor that comprises a reciprocating hammer piston (13) that, when impacting upon an anvil (14), converts its kinetic energy to shock wave energy that propagates through an elongate tool (14), for example a tool in the form of a drill stem or chisel, characterized by the steps of sensing the reflected shock waves and adjusting the impact velocity of the hammer piston (13) in response to the sensed reflected shock waves such that the reflected shock wave energy is minimized.
2. Method according to claim 1, characterized in that the stroke length of the hammer piston (13) is adjusted in order to adjust the impact velocity of the hammer piston.
3. Method according to claim 1 or 2, characterized i n that the impact velocity of the hammer piston (13) is so adjusted as to make the reflected shock wave energy small and substantially in the form of compressive wave energy.
4. Method according to any one of the preceding claims, characterized in that the movement coupled to the reflected shock waves is sensed.
5. Method according to claim 4, characterized in that the movement coupled to the reflected shock waves and the movement coupled to the primary shock waves are sensed and the impact velocity is adjusted in response to the quotient of the lengths of said movements.
6. Impact motor comprising a reciprocating hammer piston (13) that is arranged to impact upon an anvil (14) so as to convert its kinetic energy to shock wave energy that will propagate through an elongate tool (14) for example a tool in the form of a drill stem or chisel, and an adjusting device (48) for adjusting the impact velocity of the hammer piston, characterized by means (55, 71) for sensing the movement coupled to the reflected shock waves and controlling said adjusting device (48) in response to the amount of reflected shock waves in order to minimize the reflected shock wave energy.
7. Impact motor according to claim 6 wherein an elastically yieldable element (17) is arranged to transmit a feed force to the tool, characterized in that said sensing means (55) is arranged to sense the rebounce of said yieldable element (17) and to control said adjusting device (48) such that the rebounce of the yieldable element (17) will be small but existing.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| SE8106907A SE8106907L (en) | 1981-11-20 | 1981-11-20 | WAY TO CONTROL A PERFORMANCE AND PERFORMANCE |
| SE8106907 | 1981-11-20 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0080446A2 true EP0080446A2 (en) | 1983-06-01 |
| EP0080446A3 EP0080446A3 (en) | 1985-01-23 |
Family
ID=20345077
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP82850229A Withdrawn EP0080446A3 (en) | 1981-11-20 | 1982-11-12 | Method of controlling an impact motor and an impact motor |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP0080446A3 (en) |
| JP (1) | JPS5890476A (en) |
| SE (1) | SE8106907L (en) |
Cited By (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0112810A2 (en) * | 1982-12-27 | 1984-07-04 | Atlas Copco Aktiebolag | A rock drilling apparatus and a method of optimizing percussion rock drilling |
| EP0214064A1 (en) * | 1985-07-16 | 1987-03-11 | Etablissements Montabert | Method of controlling the movement of the impacting piston of a non-compressible fluid-actuated percussion device, and device therefor |
| FR2598111A1 (en) * | 1986-05-02 | 1987-11-06 | Tampella Oy Ab | Arrangement for the axial bearing of a boring machine |
| FR2602448A1 (en) * | 1986-08-07 | 1988-02-12 | Montabert Ets | METHOD FOR CONTROLLING THE PERCUSSION PARAMETERS OF THE PISTON OF STROKE OF A MU DEVICE BY AN INCOMPRESSIBLE FLUID UNDER PRESSURE, AND APPARATUS FOR CARRYING OUT SAID METHOD |
| EP0389454A1 (en) * | 1989-02-21 | 1990-09-26 | Atlas Copco Construction and Mining Technique AB | Device in impact machines |
| FR2647870A1 (en) * | 1989-06-06 | 1990-12-07 | Eimco Secoma | HYDRAULIC PERCUSSION APPARATUS WITH RETURNING SHOCK WAVE DAMPING DEVICE |
| EP0471649A1 (en) * | 1990-08-16 | 1992-02-19 | SIG Schweizerische Industrie-Gesellschaft | Fluid pressure-operated hammer |
| EP0475171A2 (en) * | 1990-09-08 | 1992-03-18 | Krupp Maschinentechnik Gesellschaft Mit Beschränkter Haftung | Hydraulically operated percussion mechanism |
| EP0522344A2 (en) * | 1991-07-09 | 1993-01-13 | Bretec Oy | Hydraulic impact hammer |
| EP0715932A1 (en) * | 1994-12-08 | 1996-06-12 | Etablissements Montabert | Method and apparatus for adjusting the stroke of a non-compressible fluid-actuated percussion device |
| DE19545708A1 (en) * | 1995-12-07 | 1997-06-12 | Krupp Bautechnik Gmbh | Method for influencing the operating behavior of a fluid-operated hammer mechanism and hammer mechanism suitable for carrying out the method |
| WO2001083170A1 (en) * | 2000-04-28 | 2001-11-08 | Oy Robit Rocktools Ltd | Method and arrangement for adjusting the percussion energy in a percussion drilling apparatus |
| WO2003078107A1 (en) * | 2002-03-19 | 2003-09-25 | Montabert S.A. | Hydraulic rotary-percussive hammer drill |
| WO2004042193A1 (en) * | 2002-11-05 | 2004-05-21 | Sandvik Tamrock Oy | Arrangement for controlling rock drilling |
| WO2006003259A1 (en) * | 2004-07-02 | 2006-01-12 | Sandvik Mining And Construction Oy | Method for controlling percussion device, software product, and percussion device |
| EP2059369A1 (en) * | 2006-09-13 | 2009-05-20 | Atlas Copco Rock Drills AB | Percussion device, drilling machine including such a percussion device and method for controlling such a percussion device |
| WO2010037905A1 (en) * | 2008-09-30 | 2010-04-08 | Sandvik Mining And Construction Oy | Method and arrangement in rock drilling rig |
| CN101370621B (en) * | 2006-02-20 | 2010-11-10 | 阿特拉斯科普科凿岩机股份公司 | Percussion device and rock drilling machine including such a percussion device |
| EP2614217A1 (en) | 2010-09-10 | 2013-07-17 | Rockdrill Services Australia Pty Ltd | Improved rock drill |
| WO2015122824A1 (en) * | 2014-02-14 | 2015-08-20 | Atlas Copco Rock Drills Ab | Damping device for a percussion device, percussion device and rock drilling machine |
| EP2566665A4 (en) * | 2010-05-03 | 2016-04-13 | Atlas Copco Rock Drills Ab | Drilling machine |
| US9511489B2 (en) | 2011-04-27 | 2016-12-06 | Atlas Copco Rock Drills Ab | Impact mechanism, rock drill and drill rig comprising such impact mechanism |
| FR3077752A1 (en) * | 2018-02-14 | 2019-08-16 | Montabert | ROTO-PERCUTTING HYDRAULIC PERFORATOR WITH CONTROLLED CHAMBER CONNECTED TO LOW PRESSURE ACCUMULATOR |
| CN114502330A (en) * | 2019-11-15 | 2022-05-13 | 喜利得股份公司 | Impact mechanism arrangement |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6495672B2 (en) * | 2015-01-30 | 2019-04-03 | 古河ロックドリル株式会社 | Hydraulic striking device, valve timing switching method and valve port setting method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2304449A1 (en) * | 1975-03-18 | 1976-10-15 | Atlas Copco Ab | REBOUND DAMPER FOR PERCUSSION TOOL |
| DE2654200A1 (en) * | 1975-12-18 | 1977-06-23 | Roger Montabert | IMPACT DEVICE |
| EP0035005A1 (en) * | 1980-02-20 | 1981-09-02 | Atlas Copco Aktiebolag | A hydraulically operated impact device |
-
1981
- 1981-11-20 SE SE8106907A patent/SE8106907L/en not_active Application Discontinuation
-
1982
- 1982-11-12 EP EP82850229A patent/EP0080446A3/en not_active Withdrawn
- 1982-11-19 JP JP57202196A patent/JPS5890476A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2304449A1 (en) * | 1975-03-18 | 1976-10-15 | Atlas Copco Ab | REBOUND DAMPER FOR PERCUSSION TOOL |
| DE2654200A1 (en) * | 1975-12-18 | 1977-06-23 | Roger Montabert | IMPACT DEVICE |
| EP0035005A1 (en) * | 1980-02-20 | 1981-09-02 | Atlas Copco Aktiebolag | A hydraulically operated impact device |
Cited By (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0112810A2 (en) * | 1982-12-27 | 1984-07-04 | Atlas Copco Aktiebolag | A rock drilling apparatus and a method of optimizing percussion rock drilling |
| EP0112810A3 (en) * | 1982-12-27 | 1985-08-28 | Atlas Copco Aktiebolag | A rock drilling apparatus and a method of optimizing percussion rock drilling |
| EP0214064A1 (en) * | 1985-07-16 | 1987-03-11 | Etablissements Montabert | Method of controlling the movement of the impacting piston of a non-compressible fluid-actuated percussion device, and device therefor |
| FR2595972A2 (en) * | 1985-07-16 | 1987-09-25 | Montabert Ets | Percussion appliance |
| FR2598111A1 (en) * | 1986-05-02 | 1987-11-06 | Tampella Oy Ab | Arrangement for the axial bearing of a boring machine |
| FR2602448A1 (en) * | 1986-08-07 | 1988-02-12 | Montabert Ets | METHOD FOR CONTROLLING THE PERCUSSION PARAMETERS OF THE PISTON OF STROKE OF A MU DEVICE BY AN INCOMPRESSIBLE FLUID UNDER PRESSURE, AND APPARATUS FOR CARRYING OUT SAID METHOD |
| EP0256955A1 (en) * | 1986-08-07 | 1988-02-24 | Etablissements Montabert | Method and apparatus for adjusting the percussion parameters of the impacting piston of a non compressible fluid-actuated device |
| EP0389454A1 (en) * | 1989-02-21 | 1990-09-26 | Atlas Copco Construction and Mining Technique AB | Device in impact machines |
| FR2647870A1 (en) * | 1989-06-06 | 1990-12-07 | Eimco Secoma | HYDRAULIC PERCUSSION APPARATUS WITH RETURNING SHOCK WAVE DAMPING DEVICE |
| US5056606A (en) * | 1989-06-06 | 1991-10-15 | Eimco-Secoma (Societe Anonyme) | Damped hammer drill |
| EP0471649A1 (en) * | 1990-08-16 | 1992-02-19 | SIG Schweizerische Industrie-Gesellschaft | Fluid pressure-operated hammer |
| EP0475171A3 (en) * | 1990-09-08 | 1992-05-20 | Krupp Maschinentechnik Gesellschaft Mit Beschraenkter Haftung | Hydraulically operated percussion mechanism |
| EP0475171A2 (en) * | 1990-09-08 | 1992-03-18 | Krupp Maschinentechnik Gesellschaft Mit Beschränkter Haftung | Hydraulically operated percussion mechanism |
| EP0522344A2 (en) * | 1991-07-09 | 1993-01-13 | Bretec Oy | Hydraulic impact hammer |
| EP0522344A3 (en) * | 1991-07-09 | 1993-07-28 | Rammer Bretec Oy | Hydraulic impact hammer |
| US5669281A (en) * | 1994-12-08 | 1997-09-23 | Etablissements Montabert | Method and machine for altering the striking stroke of a percussive machine moved by a pressurized incompressible fluid |
| FR2727891A1 (en) * | 1994-12-08 | 1996-06-14 | Montabert Ets | METHOD AND APPARATUS FOR REGULATING THE STRIKING STROKE OF A PERCUSSION APPARATUS MOUSED BY AN INCOMPRESSIBLE PRESSURE FLUID |
| EP0715932A1 (en) * | 1994-12-08 | 1996-06-12 | Etablissements Montabert | Method and apparatus for adjusting the stroke of a non-compressible fluid-actuated percussion device |
| DE19545708A1 (en) * | 1995-12-07 | 1997-06-12 | Krupp Bautechnik Gmbh | Method for influencing the operating behavior of a fluid-operated hammer mechanism and hammer mechanism suitable for carrying out the method |
| WO2001083170A1 (en) * | 2000-04-28 | 2001-11-08 | Oy Robit Rocktools Ltd | Method and arrangement for adjusting the percussion energy in a percussion drilling apparatus |
| WO2003078107A1 (en) * | 2002-03-19 | 2003-09-25 | Montabert S.A. | Hydraulic rotary-percussive hammer drill |
| FR2837523A1 (en) * | 2002-03-19 | 2003-09-26 | Montabert Sa | Hydraulic rotary percussive hammer drill comprises body containing alternating impact piston sliding under effect of main hydraulic circuit also causing annular stop piston to slide in body cavity |
| US7234548B2 (en) | 2002-03-19 | 2007-06-26 | Montabert S.A. | Hydraulic rotary-percussive hammer drill |
| US7654337B2 (en) | 2002-11-05 | 2010-02-02 | Sandvik Mining And Construction Oy | Arrangement for controlling rock drilling |
| WO2004042193A1 (en) * | 2002-11-05 | 2004-05-21 | Sandvik Tamrock Oy | Arrangement for controlling rock drilling |
| AU2005259128B2 (en) * | 2004-07-02 | 2010-02-18 | Sandvik Mining And Construction Oy | Method for controlling percussion device, software product, and percussion device |
| WO2006003259A1 (en) * | 2004-07-02 | 2006-01-12 | Sandvik Mining And Construction Oy | Method for controlling percussion device, software product, and percussion device |
| US7717190B2 (en) | 2004-07-02 | 2010-05-18 | Sandvik Mining And Construction Oy | Method for controlling percussion device, software production, and percussion device |
| CN101370621B (en) * | 2006-02-20 | 2010-11-10 | 阿特拉斯科普科凿岩机股份公司 | Percussion device and rock drilling machine including such a percussion device |
| EP2059369A4 (en) * | 2006-09-13 | 2013-04-24 | Atlas Copco Rock Drills Ab | Percussion device, drilling machine including such a percussion device and method for controlling such a percussion device |
| EP2059369A1 (en) * | 2006-09-13 | 2009-05-20 | Atlas Copco Rock Drills AB | Percussion device, drilling machine including such a percussion device and method for controlling such a percussion device |
| CN102164714B (en) * | 2008-09-30 | 2014-05-07 | 山特维克矿山工程机械有限公司 | Method and arrangement in rock drilling rig |
| WO2010037905A1 (en) * | 2008-09-30 | 2010-04-08 | Sandvik Mining And Construction Oy | Method and arrangement in rock drilling rig |
| CN102164714A (en) * | 2008-09-30 | 2011-08-24 | 山特维克矿山工程机械有限公司 | Method and arrangement in rock drilling rig |
| AU2009299713B2 (en) * | 2008-09-30 | 2013-08-29 | Sandvik Mining And Construction Oy | Method and arrangement in rock drilling rig |
| EP2566665A4 (en) * | 2010-05-03 | 2016-04-13 | Atlas Copco Rock Drills Ab | Drilling machine |
| EP2614217A4 (en) * | 2010-09-10 | 2015-10-07 | Rockdrill Services Australia Pty Ltd | Improved rock drill |
| EP2614217A1 (en) | 2010-09-10 | 2013-07-17 | Rockdrill Services Australia Pty Ltd | Improved rock drill |
| US9511489B2 (en) | 2011-04-27 | 2016-12-06 | Atlas Copco Rock Drills Ab | Impact mechanism, rock drill and drill rig comprising such impact mechanism |
| US10456898B2 (en) | 2014-02-14 | 2019-10-29 | Epiroc Rock Drills Aktiebolag | Damping device for a percussion device, percussion device and rock drilling machine |
| CN105980658A (en) * | 2014-02-14 | 2016-09-28 | 阿特拉斯·科普柯凿岩设备有限公司 | Damping device for a percussion device, percussion device and rock drilling machine |
| KR20160119074A (en) * | 2014-02-14 | 2016-10-12 | 아트라스 콥코 록 드릴스 에이비 | Damping device for a percussion device, percussion device and rock drilling machine |
| EP3105415A4 (en) * | 2014-02-14 | 2017-10-25 | Atlas Copco Rock Drills AB | Damping device for a percussion device, percussion device and rock drilling machine |
| CN105980658B (en) * | 2014-02-14 | 2019-06-14 | 安百拓凿岩有限公司 | Buffer unit, percussion device and rock drill for percussion device |
| WO2015122824A1 (en) * | 2014-02-14 | 2015-08-20 | Atlas Copco Rock Drills Ab | Damping device for a percussion device, percussion device and rock drilling machine |
| FR3077752A1 (en) * | 2018-02-14 | 2019-08-16 | Montabert | ROTO-PERCUTTING HYDRAULIC PERFORATOR WITH CONTROLLED CHAMBER CONNECTED TO LOW PRESSURE ACCUMULATOR |
| WO2019158834A1 (en) * | 2018-02-14 | 2019-08-22 | Montabert | Rotary-percussive hydraulic drill provided with a control chamber which is permanently connected to a low-pressure accumulator |
| CN111712353A (en) * | 2018-02-14 | 2020-09-25 | 蒙塔博特公司 | Rotary impact hydraulic perforator provided with a control chamber permanently connected to a low pressure accumulator |
| CN111712353B (en) * | 2018-02-14 | 2023-03-21 | 蒙塔博特公司 | Rotary impact hydraulic perforator provided with a control chamber permanently connected to a low pressure accumulator |
| US11724379B2 (en) | 2018-02-14 | 2023-08-15 | Montabert | Rotary-percussive hydraulic perforator provided with a control chamber permanently connected to a low-pressure accumulator |
| AU2019221107B2 (en) * | 2018-02-14 | 2024-04-04 | Montabert S.A. | Rotary-percussive hydraulic drill provided with a control chamber which is permanently connected to a low-pressure accumulator |
| CN114502330A (en) * | 2019-11-15 | 2022-05-13 | 喜利得股份公司 | Impact mechanism arrangement |
Also Published As
| Publication number | Publication date |
|---|---|
| JPS5890476A (en) | 1983-05-30 |
| EP0080446A3 (en) | 1985-01-23 |
| SE8106907L (en) | 1983-05-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0080446A2 (en) | Method of controlling an impact motor and an impact motor | |
| EP0058650B1 (en) | An hydraulically operated impact device | |
| US4800797A (en) | Hydraulic percussion device and method of controlling same | |
| EP0112810A2 (en) | A rock drilling apparatus and a method of optimizing percussion rock drilling | |
| EP0035005B1 (en) | A hydraulically operated impact device | |
| US5392865A (en) | Hydraulic percussion apparatus | |
| US4006783A (en) | Hydraulic operated rock drilling apparatus | |
| US3965799A (en) | Hydraulically operated percussion device | |
| US4899836A (en) | Hydraulic percussion instrument and method of operating same | |
| US3780621A (en) | Hydraulic fluid actuated percussion tool | |
| US5419403A (en) | Pneumatic hammer | |
| GB1515442A (en) | Hydraulic percussion tool with impact blow and frequency control | |
| ES461657A1 (en) | Hydraulic percussion apparatus | |
| SE529615C2 (en) | Percussion and rock drill and method for controlling the stroke of the piston | |
| GB1262170A (en) | Hydraulically actuated percussive tools | |
| US3741072A (en) | Hydraulic fluid actuated percussion tool | |
| US4563938A (en) | Pressure fluid operated percussive tool | |
| US8453756B2 (en) | Rock drilling equipment and a method in association with same | |
| US5350023A (en) | Pneumatic hammer | |
| EP0070044B1 (en) | Hydraulically operated impact motor | |
| EP0265401A2 (en) | Damping device for a percussion rock drilling machine | |
| US4450920A (en) | Hydraulic reciprocating machines | |
| GB1373848A (en) | Hydraulic breaker operated by oil | |
| SU1689605A1 (en) | Pneumatic plunger | |
| CA1325562C (en) | Reciprocating percussive device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Designated state(s): AT CH DE FR GB IT LI SE |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Designated state(s): AT CH DE FR GB IT LI SE |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ATLAS COPCO AKTIEBOLAG |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION IS DEEMED TO BE WITHDRAWN |
|
| 18D | Application deemed to be withdrawn |
Effective date: 19850924 |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: WIJK, AXEL GUNNAR Inventor name: ANDERSSON, KURT HOLGER |