EP0076780A1 - Procédé pour réduire la consommation d'un moteur pas à pas et dispositif mettant en oeuvre ce procédé - Google Patents
Procédé pour réduire la consommation d'un moteur pas à pas et dispositif mettant en oeuvre ce procédé Download PDFInfo
- Publication number
- EP0076780A1 EP0076780A1 EP82810396A EP82810396A EP0076780A1 EP 0076780 A1 EP0076780 A1 EP 0076780A1 EP 82810396 A EP82810396 A EP 82810396A EP 82810396 A EP82810396 A EP 82810396A EP 0076780 A1 EP0076780 A1 EP 0076780A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- voltage
- winding
- difference
- value
- instant
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Classifications
-
- G—PHYSICS
- G04—HOROLOGY
- G04C—ELECTROMECHANICAL CLOCKS OR WATCHES
- G04C3/00—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means
- G04C3/14—Electromechanical clocks or watches independent of other time-pieces and in which the movement is maintained by electric means incorporating a stepping motor
- G04C3/143—Means to reduce power consumption by reducing pulse width or amplitude and related problems, e.g. detection of unwanted or missing step
Definitions
- the present invention relates to a method for reducing the consumption of a stepping motor by automatically adapting the duration of each driving pulse supplied to this motor to the load which the latter must drive.
- the invention also relates to a device for controlling a stepping motor of a timepiece, this device implementing the aforementioned method.
- French Patent No. 2,200,675 proposes to measure the load which the motor must drive, by permanently measuring the current flowing in the winding of the motor during the application to this winding of a driving pulse and in interrupting said driving pulse when this current passes through a minimum.
- the object of the present invention is to provide a reliable and safe method suitable for all types of engine and making it possible to adapt the length of the driving impulse at the load which the motor must drive.
- the method according to the invention consists in carrying out during each driving pulse several elementary interruption periods during which the power source is disconnected from the winding, and in determining the mechanical load driven by the motor by measuring during the periods of interruption a quantity representative of the variation of the induced voltage of movement, that is to say of the voltage induced in the winding of the motor by the movement of the rotor.
- the voltage U. induced in the winding of the motor by the rotation of the rotor is a function of the speed of this rotor, and its evolution as a function of time depends on the load which the motor must drive. It is therefore possible to determine this load by measuring the evolution of the movement induced voltage since the start of the driving pulse.
- this induced voltage U i increases, reaches a maximum and then decreases differently depending on whether the load on the motor is low or large. In the first case, this induced voltage increases and decreases at times closer to the start of the motor impulse than in the second case.
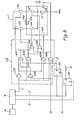
- Figure 1 shows the equivalent diagram of a stepping motor.
- the motor winding is represented by a winding 1 of inductivity L and zero resistance, and by a resistance 2 of value R equal to the resistance of the motor winding.
- a rotor 1a symbolized by its bipolar permanent magnet, is magnetically coupled to the winding 1,2 by a stator not shown.
- the induced movement voltage that is to say that which is induced in the winding of the motor by the rotation of the rotor, is symbolized in FIG. 1 by the voltage source 3. The value of this induced voltage is designated published..
- the power source of the motor is represented by a source 4 of zero internal resistance and of electromotive force V and by a resistance 5 of value R * equal to the internal resistance of the real source used to power the motor.
- the motor control circuit is symbolized by a first switch 6 serving to onnect and disconnect the source 4, 5 of the winding 1, 2 of the notor, and by a second switch 7 used to put this winding in short circuit or to remove this short circuit.
- equation (2) can be written: or :
- This equation (3) shows that the voltage U i induced in the winding of the motor by the rotation of the rotor can be determined at each interruption period, that is to say at each period during which the source d power supply is disconnected from the winding and the latter is short-circuited, by measuring the values I a and I b of the current at the start and at the end of each of the interruption periods, the quantities R, Tl and ⁇ being known.
- This difference is then compared to the value ⁇ , and a signal is produced when this comparison shows that ( ⁇ ⁇ I a - I b ) ⁇ ⁇ .
- This signal indicates that the voltage U i has become equal to or greater than the threshold voltage U is , and therefore that the instant t 1 has been reached or exceeded.
- the various currents Ia, I b and i are measured by the value of the voltages U a , U b and u which they produce respectively by passing through a measurement resistor connected in series with motor winding during periods of interruption of the driving impulse. It is obvious that the various calculations described above are then carried out on the voltages which represent these currents and which are proportional to them.
- the factor ⁇ is then replaced by a factor where R is the value of the measurement resistance.
- Equation (3) above becomes under these conditions:
- the timepiece shown by way of example in FIG. 2 comprises a circuit 8 generating a time standard signal H, having a frequency equal, for example, to 16,384 Hz.
- the circuit 8 is formed by a quartz oscillator and a first divider by two stage, and its output is connected to the input of a divider circuit 9 developing, from the time standard signal H various periodic signals including in particular a signal I of frequency equal to 1/2 Hz, a signal J of frequency equal to 1 Hz and a signal K of frequency equal to 64 Hz.
- the timepiece of FIG. 2 further comprises a pulse-forming circuit 15, the output of which delivers a signal, designated by Z, formed of a series of pulses which pass to state "1" each time that the signal J itself passes to the state "1", that is to say every second (see FIG. 2a).
- the pulses of the signal Z return to the state "0" in response to a signal N delivered by a calculation circuit 26 which will be described later. The instant when this signal N appears therefore determines the duration of the pulses of the signal Z.
- the pulse forming circuit 15 also delivers an auxiliary signal designated by 0 formed by pulses which pass to state "1" at the same time as the Z pulses but which have a fixed duration of, for example, 7.8 milliseconds .
- a drive circuit 12 delivers a driving pulse to the winding lla of the motor 11.
- the voltage measured at the terminals of this winding lIa is designated by U m at the Figure 2a.
- the energy supplied to the winding 11a during each driving pulse is delivered by a power source 10.
- the polarity of the driving pulses is determined by the logic state of the signal I, which alternately takes the state “0” and the state "1" for 1 second.
- the drive circuit 12 is further arranged so that the driving pulses are chopped in response to a signal M formed of pulses having a high frequency.
- the drive circuit 12 interrupts the connection between the power source 10 and the winding 11a, and puts the latter in short-circuit.
- the circuit 12 delivers on an output 12a a voltage proportional to the current flowing in the winding 11a. This voltage is used by a measurement circuit 16, an example of which will be described later, to determine the instant t 1 when the voltage U. induced in the winding lla by the rotation of the rotor reaches the reference value Uis.
- this measurement circuit 16 delivers at its output 16 a signal P, which is in turn used by the calculation circuit 26 to supply the signal N at time t 2 .
- This calculation circuit 26, is arranged so that the instant t 2 is separated from the start of the driving pulse by a time equal to ( ⁇ ⁇ T d + ⁇ ), where ⁇ and ⁇ are the experimentally determined constants mentioned above. This time is therefore equal to the optimal duration of the motor pulse. As the signal N returns the signal Z to the state "0", this signal Z, and therefore the driving pulse, have a duration equal to this optimal duration.
- the signal M is supplied by a circuit 13, an example of which will be described later.
- the duration of each pulse of this signal M and the duration of the time between these pulses are determined by the content of a memory 14.
- FIG. 3 represents the diagram of an example of a first embodiment of the circuit 16 for measuring the induced voltage U i of the device represented in FIG. 2.
- This circuit 16 comprises an input 16a which receives the voltage from circuit 12 proportional to the current flowing in the winding lla, a capacitor 18, one armature of which is connected to ground 19 and the other armature 18a of which is connected to the input 16a by a transmission gate 20 as well as to the non-input -inverting an operational amplifier 21 whose output is connected directly to its inverting input.
- the control electrode of door 20 is connected to the output Q of a flip-flop of type T 22 whose clock input T receives the signal M via input 16c and whose input of reset R receives signal H via input 16d.
- a calculation circuit 23 comprises a voltage divider formed by two resistors 231 and 232 connected in series between the output of the amplifier 21 and the ground, and a differential amplifier 233 whose non-inverting input is connected to the connection point resistors 231 and 232.
- the circuit 23 further comprises two resistors 234 and 235 connected in series between the output of the amplifier 233 and a voltage generator 24. The inverting input of the amplifier 233 is connected to the connection point resistors 234 and 235.
- the output of amplifier 233 is connected to the non-inverting input of another differential amplifier 25, the inverting input of which is connected to terminal 16a via a transmission gate 20a.
- the control electrode of this door 20a is connected to the output Q of a flip-flop 22a of type T whose clock input T receives the signal M via an inverter 22b and whose input R receives the signal H.
- the output of the amplifier 25 constitutes the output 16e of the measurement circuit 16.
- the resistors 234 and 235, as well as the voltage supplied by the generator 24 are chosen so that the output of the amplifier 233 delivers a voltage equal to ( ⁇ ⁇ U a - ⁇ '), where as above.
- the signal M goes to the state "0", and the output Q of the flip-flop 22a goes to the state "1" for about 30 microseconds.
- the voltage U b proportional to current I b which flows in the winding lla at this instant is therefore applied to the inverting input of the amplifier 25 which compares it to the voltage ( ⁇ ⁇ U a - ⁇ ') present at the output of the amplifier 233 As long as this voltage U b is greater than this voltage ( ⁇ ⁇ U a - ⁇ '), the output of the amplifier 25 remains in the state "0".
- the output of the amplifier 25 delivers the signal P while passing to the state "1", which indicates that the induced voltage U. in the winding by the rotation of the rotor has exceeded the threshold voltage U is .
- This passage of the output of the amplifier 25 to the state "1" marks the instant t l .
- FIG. 3a represents the diagram of a second embodiment of the circuit 16 for measuring the induced voltage U .
- the elements 18, 20, 20a, 21, 22, 22a, 22b, 24, 231 and 232 of this circuit are identical to the elements designated by the same references in FIG. 3 and function in the same way.
- the signal ⁇ ⁇ U a present at the connection point of resistors 231 and 232 is applied to the non-inverting input of an amplifier 233 '.
- Two resistors 234 'and 235' are connected in series between the gate 20a and the output of the amplifier 233 '.
- the connection point of these two resistors is connected to the inverting input of the amplifier 233 '.
- the output of the amplifier 233 ' is connected to the non-inverting input of an amplifier 25' whose inverting input is connected to the output of the voltage generator 24.
- the output of the amplifier 25 ' constitutes in this case the output 16th of the measurement circuit 16.
- the resistors 234 'and 235' are chosen so that the output of the amplifier 233 'delivers a voltage equal to ( ⁇ ⁇ U a -U b ).
- the gate 20a, the flip-flop 22a and the inverter 22b can be deleted from the diagrams of FIGS. 3 and 3a, the input 16a of the circuit 16 then being connected directly to the inverting input of the amplifier 25, respectively to the resistor 235 '.
- the calculations and comparisons are therefore made continuously on the voltage u produced in the measurement resistor by the current i which flows in the winding lla after the start of the interruption period.
- the signal P is then delivered as soon as the voltage u becomes lower than the voltage ( ⁇ ⁇ U a - ⁇ '), respectively as soon as the voltage ( ⁇ ⁇ U a -u) becomes higher than the voltage ⁇ '.
- FIG. 4 represents an exemplary embodiment of the computer circuit 26 of FIG. 2.
- the circuit 26 comprises a reversible preselection counter 27 having preselection terminals P1, P2, P3 and P4 connected respectively to the output terminals, M2, M3 and M4 of a read-only memory 28.
- the counter 27 includes a preselection control input PE receiving the signal 0 via an inverter 29.
- the clock input CL of the counter 27 is connected to the output of a NAND gate 30 having two inputs each connected to the output of a NAND gate 31, respectively 32.
- the circuit 26 further comprises a circuit divider 33 providing two signals Q1 and Q2 of respective frequencies fl and f2, in response to signal H.
- Signal Q1 is applied to one of the inputs of gate 31 while signal Q2 is applied to one of the inputs of gate 32.
- a second input of gate 31 is connected to the output Q of a flip-flop of type T 34 whose clock input T is connected to the input terminal 26a of circuit 26.
- a second input of the gate 32 is connected to the output Q of the flip-flop 34.
- the counting direction control input U / D of the counter 27 is connected to the Q output of the flip-flop 34.
- the counter 27 also includes a coincidence output C, the state of which changes to "1" for a short time when the content of the counter reaches the value zero.
- This output C is connected to the clock input T of a flip-flop of type T 35 whose output Q constitutes the output 26b of the circuit 26, and whose reset input R is connected to the output Q d 'a type T flip-flop 101.
- the latter flip-flop receives the signal 0 on its clock input T and the signal H on its reset input R.
- the output C of the counter 27 is also connected to the reset input at zero R of flip-flop 34.
- FIG. 4a illustrates the operation of the circuit 26 shown in FIG. 4.
- the signal 0 is in the state "0", and the input PE of the counter 27 is in the state "1".
- This counter 27 is therefore blocked in the state where its content corresponds to the content of the memory 28, which is designated by No.
- the signal 0 goes to "1", putting in state "0” the input PE of the counter 27 which is thus released and begins to count in the normal direction the pulses coming from the door 30, from this state No.
- This counting is carried out at the frequency fl.
- the Q output of flip-flop 35 is reset to state "0" at the start of each driving pulse by the state "1" which appears at output Q of flip-flop 101 in response to signal 0.
- This state "1" is deleted after approximately 30 microseconds, when signal H changes to state "1".
- FIG. 4a shows that the time T which elapses between the start t o of the driving pulse and the appearance, at time t 2 of the signal N at the output 26b of the circuit 26 is linked to the time T d which flows between the instants t o and t l by the relation: in which fl and f2 are the frequencies of the signals supplied by the outputs Q1 and Q2 of the divider 33 and No is the number contained in memory 28, and therefore the number contained by counter 27 at time t a .
- FIG. 5 represents an example of a diagram of the circuits 12 and 15 of FIG. 2.
- the circuit 15 is formed in this example of two flip-flops of type T whose clock inputs T both receive the signal J delivered by the divider of frequency 9 of FIG. 2 at a frequency of 1 Hz.
- the reset input R of flip-flop 38 receives the signal K, also supplied by the frequency divider 9, at a frequency of 64 Hz.
- the output Q of this flip-flop 38 therefore goes to state "1" every second when the signal J goes to state "1", and goes back to state "0" about 7.8 milliseconds later, when signal K in turn goes to state "1".
- This output Q of flip-flop 38 therefore supplies the signal 0.
- the reset input R of flip-flop 39 receives the signal N from the calculation circuit 26 of FIG. 2.
- the output Q of this flip-flop 39 therefore also goes to state “1” when the signal J goes to l 'state "1", and returns to state "0" when the circuit 26 delivers the signal N at the instant t 2 determined in the manner described above.
- This output Q of the flip-flop 39 therefore supplies the signal Z which has a duration equal to the optimum duration of the driving pulse.
- the circuit 12 of FIG. 2 comprises, in this example, a combinatorial circuit 43 formed of four AND gates 431 to 434, of two OR doors 435 and 436 and two reversers 437 and 438.
- the winding lla of the motor is connected in a circuit formed by four transmission doors 44 to 47 conventionally connected between the + V terminal of the power source 10 and the mass.
- Two other transmission doors 48 and 49 each connect one of the terminals of the winding 11a to a first terminal of a resistor 17, the second terminal of which is connected to ground.
- the first terminal of this resistor 17 is also connected to the input 16a of the circuit 16 of FIG. 2.
- This resistor 17 constitutes the measurement resistance mentioned previously.
- FIG. 6 shows by way of example the diagram of an embodiment of the circuits 13 and 14 of the device of FIG. 2.
- the circuit 13 comprises two reversible preset counters 131 and 132.
- the U / D inputs for controlling the counting direction of these counters 131 and 132 are permanently in the "1" state. These counters 131 and 132 therefore operate as down counters.
- Their preselection terminals, designated together by Pi are respectively connected to the outputs, designated together by Si, of two memories 141 and 142 which form the memory 14 of the circuit of FIG. 2. These memories 141 and 142 can be, for example, dead memories.
- the clock inputs CL of the counters 131 and 132 are both connected to the output of the generator 8 (FIG. 2) which delivers the signal H.
- the counters 131 and 132 each have a coincidence output C which delivers a short pulse each time their content becomes zero. These coincidence outputs C are connected to the inputs of an OR gate 133 whose output is connected to the clock input T of a flip-flop 134 of type T.
- the output Q of this flip-flop 134 is connected to the input PE preselection control of the counter 131 and, via an inverter 135, to the PE preselection input of the counter 132.
- This output Q of the flip-flop 134 is also connected to the output 13a of the circuit 13.
- the input PE of the counter 131 is on the other hand in the state "0", and this counter 131 counts the pulses of the signal H.
- its output C delivers a pulse which is transmitted by the gate 133 at the input T of the flip-flop 134.
- the output Q of the latter, and the input PE of the counter 131 therefore pass to the state "1".
- the content of this counter 131 therefore takes a state corresponding to the content of the memory 141, and this counter 131 hangs in this state, which is designated by N 141 in FIG. 6a.
- the PE input of the counter 132 changes to the "0" state.
- This counter 132 begins to count down the pulses of the signal H.
- its output C delivers a pulse which is transmitted by the gate 133 to the input T of flip-flop 134.
- the output Q of the latter returns to the state "0", and the process described above begins again.
- the output Q of the flip-flop 134 which delivers the signal M, therefore switches alternately to the state "0" and to the state "1" for durations which depend on the frequency of the signal H and on the content of the memories 141, respectively 142.
- the duration of the periods of interruption of the driving pulses which is equal to the duration during which the signal M is in the state "1"
- the duration of the elementary pulses which separate these periods of interruption which is equal to the duration during which the signal M is in the state "0”
- the manner in which these durations are determined is arbitrary. They can be fixed or vary, in a manner which will not be described here, as a function of parameters such as the voltage of the power source 10, or the mechanical load driven by the motor, or any other parameter.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Stepping Motors (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
- Valve Device For Special Equipments (AREA)
- Vehicle Body Suspensions (AREA)
- Electromechanical Clocks (AREA)
Abstract
Description
- La présente invention concerne un procédé pour réduire la consommation d'un moteur pas-à-pas en adaptant automatiquement la durée de chaque impulsion motrice fournie à ce moteur à la charge que ce dernier doit entraîner.
- L'invention concerne également un dispositif de commande d'un moteur pas-à-pas d'une pièce d'horlogerie, ce dispositif mettant en oeuvre le procédé précité.
- On a déjà proposé plusieurs procédés pour réduire la consommation d'un moteur pas-à-pas.
- Le brevet français no 2.200.675, par exemple, propose de mesurer la charge que doit entraîner le moteur, en mesurant en permanence le courant circulant dans l'enroulement du moteur lors de l'application sur cet enroulement d'une impulsion motrice et en interrompant ladite impulsion motrice lorsque ce courant passe par un minimum.
- La détection de ce minimum de courant est malaisée en raison des parasites pouvant se superposer au signal de mesure de courant. Il en résulte que ce procédé connu est peu fiable. Par ailleurs, pour certains moteurs ainsi que dans le cas où la charge que doit entraîner le moteur devient importante, ce minimum disparaît de sorte que ce procédé connu devient inapplicable.
- La présente invention a pour objet de proposer un procédé fiable et sûr convenant à tous les types de moteur et permettant d'adapter la longueur de l'impulsion motrice à la charge que doit entraîner le moteur.
- Le procédé selon l'invention consiste à réaliser au cours de chaque impulsion motrice plusieurs périodes d'interruption élémentaires pendant lesquelles la source d'alimentation est déconnectée de l'enroulement, et à déterminer la charge mécanique entraînée par le moteur en mesurant durant les périodes d'interruption une grandeur représentative de la variation de la tension induite de mouvement, c'est-à-dire de la tension induite dans l'enroulement du moteur par le mouvement du rotor.
- La tension U. induite dans l'enroulement du moteur par la rotation du rotor est fonction de la vitesse de ce rotor, et son évolution en fonction du temps dépend de la charge que doit entraîner le moteur. Il est donc possible de déterminer cette charge par la mesure de l'évolution de la tension induite de mouvement depuis le début de l'impulsion motrice.
- Pendant la rotation du rotor, cette tension induite Ui croît, atteint un maximum puis décroît de façon différente selon que la charge du moteur est faible ou grande. Dans le premier cas, cette tension induite croît et décroît à des moments plus rapprochés du début de l'impulsion motrice que dans le second cas.
- En détectant l'instant t1 où cette tension induite atteint une valeur prédéterminée judicieusement choisie Uis et en mesurant le laps de temps s'écoulant entre le début, de l'impulsion motrice et cet instant tl, on obtient une mesure de la variation de la tension induite et donc de la valeur instantanée de la charge entraînée par le moteur. Cette mesure étant réalisée alors même que l'impulsion motrice est appliquée sur l'enroulement du moteur, il est dès lors possible de régler la longueur de cette même impulsion motrice en fonction de ladite valeur instantanée de la charge, réalisant ainsi un asservissement direct.
- La demanderesse a constaté qu'une durée optimale d'impulsion motrice, permettant une consommation minimale du moteur tout en garantissant que le rotor termine correctement tous ses pas, peut être déterminée en mesurant le laps de temps Td s'écoulant entre le début de l'impulsion motrice et l'instant tl, et en calculant pour la durée totale de l'impulsion motrice une valeur Topt = λTd + Δ où À et Δ sont des constantes déterminées expérimentalement pour chaque type de moteur et valables pour tous les moteurs ayant les mêmes caractéristiques électriques et magnétiques.
- Les caractéristiques et avantages de l'invention seront mieux compris à la lecture de la description qui va suivre de plusieurs modes de réalisation de l'invention, description faite en référence au dessin annexé dans lequel :
- - la figure 1 est un schéma électrique équivalent d'un moteur pas-à-pas;
- - la figure 2 est un schéma synoptique d'un dispositif de commande selon un mode de réalisation de l'invention;
- - la figure 2a est un diagramme de quelques signaux mesurés dans le schéma de la figure 2;
- - les figures 3 et 3a sont des schémas détaillés d'une partie du dispositif de la figure 2, selon deux modes de réalisation de l'invention;
- - la figure 4 est un schéma détaillé d'une deuxième partie du dispositif de la figure 2, selon un mode de réalisation de l'invention;
- - la figure 4a est un diagramme en fonction du temps de l'état de comptage du compteur 27 du circuit de la figure 4;
- - la figure 5 est un schéma détaillé d'une troisième partie du dispositif de la figure 2, selon un mode de réalisation de l'invention;
- - la figure 5a représente partiellement les diagrammes du courant circulant dans l'enroulement du moteur ainsi que des signaux mesurés en divers points du circuit de la figure 5;
- - la figure 6 est un schéma détaillé d'une quatrième partie du dispositif de la figure 2; et
- - la figure 6a est un diagramme en fonction du temps de signaux mesurés en divers points du circuit de la figure 6.
- La figure 1 représente le schéma équivalent d'un moteur pas-à-pas. L'enroulement du moteur est représenté par un enroulement 1 d'inductivité L et de résistance nulle, et par une résistance 2 de valeur R égale à la résistance de l'enroulement du moteur. Un rotor la, symbolisé par son aimant permanent bipolaire, est couplé magnétiquement à l'enroulement 1,2 par un stator non représenté. La tension induite de mouvement, c'est-à-dire celle qui est induite dans l'enroulement du moteur par la rotation du rotor, est symbolisée dans la figure 1 par la source de tension 3. La valeur de cette tension induite est désignée par U..
- La source d'alimentation du moteur est représentée par une source 4 de résistance interne nulle et de force électromotrice V et par une résistance 5 de valeur R* égale à la résistance interne de la source réelle servant à alimenter le moteur.
- Enfin, dans ce schéma de la figure 1, le circuit de commande du moteur est symbolisé par un premier interrupteur 6 servant à onnecter et à déconnecter la source 4, 5 de l'enroulement 1, 2 du noteur, et par un second interrupteur 7 servant à mettre cet enroulement en court-circuit ou à supprimer ce court-circuit.
- D'une manière générale, les courants et les tensions intervenant jans le fonctionnement du moteur sont donnés par la relation :


- Si les périodes d'interruption ont une durée Tl beaucoup plus courte que la constante de temps T = R de l'enroulement, on peut admettre que

- Dans ces conditions, en remplaçant L par R.τ, l'équation (2) peut s'écrire :


- Cette équation (3) montre que la tension Ui induite dans l'enroulement du moteur par la rotation du rotor peut être déterminée à chaque période d'interruption, c'est-à-dire à chaque période au cours de laquelle la source d'alimentation est déconnectée de l'enroulement et ce dernier est mis en court-circuit, en mesurant les valeurs Ia et Ib du courant au début et à la fin de chacune des périodes d'interruptions, les grandeurs R, Tl et τ étant connues.
- Pratiquemment, il n'est pas nécessaire de mesurer la tension Ui elle-même et de la comparer avec une tension de seuil Uis pour déterminer l'instant tl. Il suffit, par exemple, de déterminer la valeur du terme (Ia


- La détermination de la valeur du terme (I


- Cette différence est ensuite comparée à la valeur β, et un signal est produit lorsque cette comparaison montre que (α·Ia - Ib) ≥ β. Ce signal indique que la tension Ui est devenue égale ou supérieure à la tension de seuil Uis, et donc que l'instant t1 a été atteint ou dépassé.
- Pour déterminer l'instant t1, il est également possible de mesurer le courant Ia et de calculer le produit α·Ia comme ci-dessus, de calculer la différence (a·Ia - β), de mesurer le courant Ib circulant dans l'enroulement à la fin de la période d'interruption, et de comparer ce courant Ib à la différence (α·Ia - β). Lorsque le courant Ib est égal ou inférieur à cette différence (α·Ia - 6), la tension U. est égale ou supérieure à la tension de référence Uis.
- Il faut noter que les considérations faites ci-dessus restent valables si les calculs et les comparaisons sont faits en utilisant, à la place de la valeur des courants I et Ib, la valeur de deux courants Ia' et Ib' mesurés au début et à la fin d'une période de mesure ayant une durée Tl' inférieure à Tl, et si, bien entendu, la valeur Tl est remplacée par cette valeur Tl'.
- Il n'est pas nécessaire d'attendre la fin de la période d'interruption ou de mesure pour faire les différents calculs et comparaisons ci-dessus. Il est possible de mesurer en permanence le courant i qui circule dans l'enroulement après le début de la période d'interruption ou de mesure et d'utiliser la valeur de ce courant, à la place du courant Ib, pour faire ces calculs et ces comparaisons, également en permanence.
- Dans les exemples qui vont être décrits ci-dessous, les divers courants Ia, Ib et i sont mesurés par la valeur des tensions Ua, Ub et u qu'ils produisent respectivement en passant dans une résistance de mesure branchée en série avec l'enroulement du moteur pendant les périodes d'interruption de l'impulsion motrice. Il est évident que les différents calculs décrits ci-dessus sont alors effectués sur les tensions qui représentent ces courants et qui leurs sont proportionnelles. Le facteur β est alors remplacé par un facteur

- L'équation (3) ci-dessus devient dans ces conditions :

- La pièce d'horlogerie représentée à titre d'exemple par la figure 2 comprend un circuit 8 générateur d'un signal de standard de temps H, ayant une fréquence égale, par exemple, à 16'384 Hz. Le circuit 8 est formé d'un oscillateur à quartz et d'un premier étage diviseur par deux, et sa sortie est reliée à l'entrée d'un circuit diviseur 9 élaborant, à partir du signal de standard de temps H divers signaux périodiques comprenant notamment un signal I de fréquence égale à 1/2 Hz, un signal J de fréquence égale à 1 Hz et un signal K de fréquence égale à 64 Hz.
- La pièce d'horlogerie de la figure 2 comporte en outre un circuit formateur d'impulsions 15 dont la sortie délivre un signal, désigné par Z, formé d'une suite d'impulsions qui passent à l'état "1" chaque fois que le signal J passe lui-même à l'état "1", c'est-à-dire chaque seconde (voir la figure 2a). Les impulsions du signal Z repassent à l'état "0" en réponse à un signal N délivré par un circuit de calcul 26 qui sera décrit plus loin. L'instant où ce signal N apparaît détermine donc la durée des impulsions du signal Z.
- Le circuit formateur d'impulsions 15 délivre également un signal auxiliaire désigné par 0 formé d'impulsions qui passent à l'état "1" en même temps que les impulsions Z mais qui ont une durée fixe de, par exemple, 7,8 millisecondes.
- Chaque fois que le signal Z est à l'état "1", un circuit d'entraînement 12 délivre une impulsion motrice à l'enroulement lla du moteur 11. La tension mesurée aux bornes de cet enroulement lIa est désignée par U m à la figure 2a. L'énergie fournie à l'enroulement lla pendant chaque impulsion motrice est délivrée par une source d'alimentation 10.
- La polarité des impulsions motrices est déterminée par l'état logique du signal I, qui prend alternativement l'état "0" et l'état "1" pendant 1 seconde.
- Le circuit d'entraînement 12 est en outre agencé de manière que les impulsions motrices soient hachées en réponse à un signal M formé d'impulsions ayant une fréquence élevée. Chaque fois que le signal M est à l'état "1", par exemple, le circuit d'entraînement 12 interrompt la liaison entre la source d'alimentation 10 et l'enroulement lla, et met ce dernier en court-circuit. Pendant ces périodes d'interruption, le circuit 12 délivre sur une sortie 12a une tension proportionnelle au courant qui circule dans l'enroulement lla. Cette tension est utilisée par un circuit de mesure 16, dont un exemple sera décrit plus loin, pour déterminer l'instant t1 où la tension U. induite dans l'enroulement lla par la rotation du rotor atteint la valeur de référence Uis.
- A l'instant t1, ce circuit de mesure 16 délivre à sa sortie 16e un signal P, qui est à son tour utilisé par le circuit de calcul 26 pour fournir le signal N à un instant t2. Ce circuit de calcul 26, dont un exemple sera décrit plus loin, est agencé de manière que l'instant t2 soit séparé du début de l'impulsion motrice par un temps égal à (λ·Td + Δ), où λ et Δ sont les constantes déterminées expérimentalement mentionnées ci-dessus. Ce temps est donc égal à la durée optimale de l'impulsion motrice. Comme le signal N fait repasser le signal Z à l'état "0", ce signal Z, et donc l'impulsion motrice, ont une durée égale à cette durée optimale.
- Le signal M est fourni par un circuit 13, dont un exemple sera décrit plus loin. La durée de chaque impulsion de ce signal M et la durée du laps de temps qui sépare ces impulsions sont déterminées par le contenu d'une mémoire 14.
- La figure 3 représente le schéma d'un exemple d'une première forme d'exécution du circuit 16 de mesure de la tension induite Ui du dispositif représenté la figure 2. Ce circuit 16 comprend une entrée 16a qui reçoit du circuit 12 la tension proportionnelle au courant circulant dans l'enroulement lla, un condensateur 18 dont une armature est reliée à la masse 19 et dont l'autre armature 18a est reliée à l'entrée 16a par une porte de transmission 20 ainsi qu'à l'entrée non-inverseuse d'un amplificateur opérationnel 21 dont la sortie est reliée directement à son entrée inverseuse. L'électrode de commande de la porte 20 est reliée à la sortie Q d'une bascule de type T 22 dont l'entrée d'horloge T reçoit le signal M par l'intermédiaire de l'entrée 16c et dont l'entrée de remise à zéro R reçoit le signal H par l'intermédiaire de l'entrée 16d.
- Un circuit de calcul 23 comporte un diviseur de tension formé de deux résistances 231 et 232 branchées en série entre la sortie de l'amplificateur 21 et la masse, et un amplificateur différentiel 233 dont l'entrée non-inverseuse est reliée au point de liaison des résistances 231 et 232. Le circuit 23 comporte en outre deux résistances 234 et 235 branchées en série entre la sortie de l'amplificateur 233 et un générateur de tension 24. L'entrée inverseuse de l'amplificateur 233 est reliée au point de liaison des résistances 234 et 235.
- La sortie de l'amplificateur 233 est reliée à l'entrée non-inverseuse d'un autre amplificateur différentiel 25 dont l'entrée inverseuse est reliée à la borne 16a par l'intermédiaire d'une porte de transmission 20a. L'électrode de commande de cette porte 20a est reliée à la sortie Q d'une bascule 22a de type T dont l'entrée d'horloge T reçoit le signal M par l'intermédiaire d'un inverseur 22b et dont l'entrée R reçoit le signal H.
- La sortie de l'amplificateur 25 constitue la sortie 16e du circuit de mesure 16.
- Le fonctionnement du circuit de la figure 3 est le suivant : au moment du passage à l'état "1" du signal M, au début de chaque période d'interruption, la sortie Q de la bascule 22 passe à l'état "1", ce qui entraîne l'ouverture de la porte 20. Lorsque le signal H passe également à l'état "1", environ 30 microsecondes plus tard, la sortie Q de la bascule 22 repasse à l'état "0", et la porte 20 se bloque à nouveau. Pendant que la porte 20 est ouverte, le condensateur 18 se charge à une tension Ua proportionnelle au courant Ia qui circule dans l'enroulement lla à cet instant. Cette tension U est appliquée, par l'intermédiaire de l'amplificateur 21, au diviseur de tension formé par les résistances 231 et 232. Les valeurs de ces résistances sont choisies de manière que la tension appliquée à l'entrée non-inverseuse de l'amplificateur 233 soit égale à α·Ua, où a est égal à

- Les résistances 234 et 235, ainsi que la tension fournie par le générateur 24 sont choisies de manière que la sortie de l'amplificateur 233 délivre une tension égale à (α·Ua-β'), où

- A la fin de la période d'interruption, le signal M passe à l'état "0", et la sortie Q de la bascule 22a passe à l'état "1" pendant environ 30 microsecondes. La tension Ub proportionnelle au courant Ib qui circule dans l'enroulement lla à cet instant est donc appliquée à l'entrée inverseuse de l'amplificateur 25 qui la compare à la tension (α·Ua-β') présente à la sortie de l'amplificateur 233. Tant que cette tension Ub est supérieure à cette tension (α·Ua-β'), la sortie de l'amplificateur 25 reste à l'état "0". Si la tension Ub est inférieure à cette tension (α·Ua-β'), la sortie de l'amplificateur 25 délivre le signal P en passant à l'état "1", ce qui indique que la tension U. induite dans l'enroulement par la rotation du rotor a dépassé la tension de seuil Uis. Ce passage de la sortie de l'amplificateur 25 à l'état "1" marque l'instant tl.
- La figure 3a représente le schéma d'une deuxième forme d'exécution du circuit 16 de mesure de la tension induite U.. Les éléments 18, 20, 20a, 21, 22, 22a, 22b, 24, 231 et 232 de ce circuit sont identiques aux éléments dési-gnés par les mêmes références à la figure 3 et fonctionnent de la même manière.
- Le signal α·Ua présent au point de liaison des résistances 231 et 232 est appliqué à l'entrée non-inverseuse d'un amplificateur 233'. Deux résistances 234' et 235' sont reliées en série entre la porte 20a et la sortie de l'amplificateur 233'. Le point de liaison de ces deux résistances est relié à l'entrée inverseuse de l'amplificateur 233'. La sortie de l'amplificateur 233' est reliée à l'entrée non-inverseuse d'un amplificateur 25' dont l'entrée inverseuse est reliée à la sortie du générateur de tension 24. La sortie de l'amplificateur 25' constitue dans ce cas la sortie 16e du circuit de mesure 16.
- Les résistances 234' et 235' sont choisies de manière que la sortie de l'amplificateur 233' délivre une tension égale à (α·Ua-Ub). L'amplificateur 25' compare cette tension à la tension β' fournie par le générateur 24. La sortie de l'amplificateur 25' fournit le signal P en passant à l'état "1" lorsque la tension (α·Ua-Ub) devient supérieure à la tension s', c'est-à-dire à nouveau lorsque la tension Ui induite dans l'enroulement par la rotation du rotor devient supérieure à la tension de seuil Uis.
- Comme cela a déjà été noté plus haut, il n'est pas nécessaire d'attendre la fin de la période d'interruption pour faire les différents calculs et comparaisons décrits ci-dessus. La porte 20a, la bascule 22a et l'inverseur 22b peuvent être supprimés des schémas des figures 3 et 3a, l'entrée 16a du circuit 16 étant alors reliée directement à l'entrée inverseuse de l'amplificateur 25, respectivement à la résistance 235'. Dans ce cas, les calculs et comparaisons sont donc effectués en permanence sur la tension u produite dans la résistance de mesure par le courant i qui circule dans l'enroulement lla après le début de la période d'interruption. Le signal P est alors délivré dès que la tension u devient inférieure à la tension (α·Ua-β'), respectivement dès que la tension (α·Ua-u) devient supérieure à la tension β'.
- La figure 4 représente un exemple de réalisation du circuit calculateur 26 de la figure 2. Dans cet exemple, le circuit 26 comprend un compteur réversible à présélection 27 ayant des bornes de présélection Pl, P2, P3 et P4 reliées respectivement aux bornes de sortieml, M2, M3 et M4 d'une mémoire morte 28. Le compteur 27 comporte une entrée de commande de présélection PE recevant le signal 0 par l'intermédiaire d'un inverseur 29. L'entrée d'horloge CL du compteur 27 est reliée à la sortie d'une porte NON-ET 30 ayant deux entrées reliées chacune à la sortie d'une porte NON-ET 31, respectivement 32. Le circuit 26 comporte en outre un circuit diviseur 33 fournissant deux signaux Q1 et Q2 de fréquences respectives fl et f2, en réponse au signal H. Le signal Q1 est appliqué sur l'une des entrées de la porte 31 tandis que le signal Q2 est appliqué sur l'une des entrées de la porte 32. Une deuxième entrée de la porte 31 est reliée à la sortie Q d'une bascule de type T 34 dont l'entrée d'horloge T est reliée à la borne d'entrée 26a du circuit 26. Une deuxième entrée de la porte 32 est reliée à la sortie Q de la bascule 34. L'entrée de commande de sens de comptage U/D du compteur 27 est reliée .à la sortie Q de la bascule 34.
- Le compteur 27 comporte également une sortie de coïncidence C dont l'état passe à "1" pendant un court instant lorsque le contenu du compteur atteint la valeur zéro. Cette sortie C est reliée à l'entrée d'horloge T d'une bascule de type T 35 dont la sortie Q constitue la sortie 26b du circuit 26, et dont l'entrée de remise à zéro R est reliée à la sortie Q d'une bascule de type T 101. Cette dernière bascule reçoit le signal 0 sur son entrée d'horloge T et le signal H sur son entrée de remise à zéro R. La sortie C du compteur 27 est également reliée à l'entrée de remise à zéro R de la bascule 34.
- La figure 4a illustre le fonctionnement du circuit 26 représenté à la figure 4.
- Entre les impulsions motrices, le signal 0 est à l'état "0", et l'entrée PE du compteur 27 est à l'état "1". Ce compteur 27 est donc bloqué dans l'état où son contenu correspond au contenu de la mémoire 28, qui est désigné par No. Au temps t coïncidant avec le début d'une impulsion motrice, le signal 0 passe à "1", mettant à l'état "0" l'entrée PE du compteur 27 qui est ainsi libéré et commence à compter en sens normal les impulsions issues de la porte 30, à partir de cet état No. Ce comptage est effectué à la fréquence fl. A l'instant t1 où la tension Ui atteint la valeur Uis, l'entrée 26a passe à "1", et les sorties Q et Q de la bascule 34 passent respectivement à l'état "1" et à l'état "0". L'état de l'entrée de commande U/D du compteur 27 passe à "0". A partir de cet instant, le compteur 27 fonctionne en décompteur. Le décomptage est effectué à la fréquence f2. A l'instant t2 où le contenu du compteur 27 devient égal à zéro, sa sortie C passe à l'état "1" pendant un court instant, mettant à l'état "1" la bascule 35 dont la sortie Q, qui était précédemment à l'état "0", passe à l'état "1".
- Simultanément, les sorties Q et Q de la bascule 34 repassent à l'état "0", respectivement "1". A la fin de l'impulsion 0, l'entrée PE du compteur 27 repasse à l'état "1". Le contenu de ce compteur 27 reprend donc la valeur fixée dans la mémoire 28 et reste à cette valeur jusqu'à ce que le signal 0 repasse à l'état "1".
- La sortie Q de la bascule 35 est remise à l'état "0" au début de chaque impulsion motrice par l'état "1" qui apparaît à la sortie Q de la bascule 101 en réponse au signal 0. Cet état "1" est supprimé après environ 30 microsecondes, lorsque le signal H passe à l'état "1".
- La figure 4a montre que le temps T qui s'écoule entre le début to de l'impulsion motrice et l'apparition, à l'instant t2 du signal N à la sortie 26b du circuit 26 est lié au temps Td qui s'écoule entre les instants to et tl par la relation :

- La comparaison de cette équation avec l'équation Topt = λ Td + Δ mentionnée plus haut, où λ et L sont des constantes déterminées expérimentalement pour chaque type de moteur, permet de choisir les valeurs de fl, f2 et No de manière que ce temps T qui s'écoule entre le début de l'impulsion motrice et l'apparition du signal N soit toujours égal à la durée optimale Topt de l'impulsion motrice.
- La figure 5 représente un exemple de schéma des circuits 12 et 15 de la figure 2. Le circuit 15 est formé dans cet exemple de deux bascules de type T dont les entrées d'horloge T reçoivent toutes deux le signal J délivré par le diviseur de fréquence 9 de la figure 2 à une fréquence de 1 Hz. L'entrée R de remise à zéro de la bascule 38 reçoit le signal K, également fourni par le diviseur de fréquence 9, à une fréquence de 64 Hz. La sortie Q de cette bascule 38 passe donc à l'état "1" chaque seconde au moment où le signal J passe à l'état "1", et repasse à l'état "0" environ 7,8 millisecondes plus tard, lorsque le signal K passe à son tour à l'état "1". Cette sortie Q de la bascule 38 fournit donc le signal 0.
- L'entrée R de remise à zéro de la bascule 39 reçoit le signal N du circuit de calcul 26 de la figure 2. La sortie Q de cette bascule 39 passe donc également à l'état "1" lorsque le signal J passe à l'état "1", et repasse à l'état "0" lorsque le circuit 26 délivre le signal N à l'instant t2 déterminé de la manière décrite ci-dessus. Cette sortie Q de la bascule 39 fournit donc le signal Z qui a une durée égale à la durée optimum de l'impulsion motrice.
- Le circuit 12 de la figure 2 comporte, dans cet exemple, un circuit combinatoire 43 formé de quatre portes ET 431 à 434, de deux portes OU 435 et 436 et de deux inverseurs 437 et 438. L'enroulement lla du moteur est branché dans un circuit formé de quatre portes de transmission 44 à 47 connectées de manière classique entre la borne +V de la source d'alimentation 10 et la masse.
- Deux autres portes de transmission 48 et 49 relient chacune une des bornes de l'enroulement lla à une première borne d'une résistance 17 dont la deuxième borne est reliée à la masse. La première borne de cette résistance 17 est également reliée à l'entrée 16a du circuit 16 de la figure 2. Cette résistance 17 constitue la résistance de mesure mentionnée précédemment.
- Les électrodes de commande des portes 44 à 49 sont reliées aux sorties du circuit combinatoire 43 dont les entrées reçoivent respectivement les signaux I, Z et M. Ce circuit combinatoire ne sera pas décrit plus en détail, car il est facile de voir, à l'aide de la figure 5a, que :
- - lorsque que le signal Z est à l'état "0", c'est-à-dire entre les impulsions motrices, les électrodes de commande des portes 44 à 49 sont toutes à l'état "0", quel que soit l'état des signaux I et M. Ces portes 44 à 49 sont donc bloquées, et l'enroulement lla est séparé de la source d'alimentation;
- - lorsque le signal Z est à l'état "1", c'est-à-dire pendant les impulsions motrices, et que le signal M. est à l'état "0", les portes 44 et 46 sont conductrices si le signal I est à l'état "0", toutes les autres portes étant bloquées, et les portes 45 et 47 sont conductrices si le signal I est à l'état "1", toutes les autres portes étant alors également bloquées. La source d'alimentation est donc reliée à l'enroulement lla par l'intermédiaire des portes 44 et 46 ou 45 et 47, et un courant circule dans l'enroulement lla dans le sens de la flèche llb ou dans le sens inverse. Cette situation est celle qui se présente entre les périodes d'interruption, pendant les impulsions élémentaires; et
- - lorsque le signal Z est à l'état "1" et que le signal M est également à l'état "1", les portes 47 et 48 ou 46 et 49 sont conductrices, selon l'état "0" ou "1" du signal I, toutes les autres portes étant alors bloquées. La source d'alimentation est donc déconnectée de l'enroulement lla, et le courant qui passe dans cet enroulement lla passe également dans la résistance 17 dans laquelle il crée la tension appliquée à l'entrée 16a du circuit de mesure 16. Cette situation est celle'qui se présente pendant les périodes d'interruption de l'impulsion motrice.
- La figure 6 représente à titre d'exemple le schéma d'une forme d'éxécution des circuits 13 et 14 du dispositif de la figure 2.
- Le circuit 13 comporte deux compteurs réversibles à présélection 131 et 132. Les entrées U/D de commande de sens de comptage de ces compteurs 131 et 132 sont en permanence à l'état "1". Ces compteurs 131 et 132 fonctionnent donc en décompteurs. Leurs bornes de présélection, désignées ensemble par Pi, sont respectivement reliées aux sorties, désignées ensemble par Si, de deux mémoires 141 et 142 qui forment la mémoire 14 du circuit de la figure 2. Ces mémoires 141 et 142 peuvent être, par exemple, des mémoires mortes.
- Les entrées d'horloge CL des compteurs 131 et 132 sont toutes deux reliées à la sortie du générateur 8 (figure 2) qui délivre le signal H.
- Les compteurs 131 et 132 comportent chacun une sortie de coïncidence C qui délivre une courte impulsion chaque fois que leur contenu devient égal à zéro. Ces sorties de coïncidence C sont reliées aux entrées d'une porte OU 133 dont la sortie est reliée à l'entrée d'horloge T d'une bascule 134 de type T. La sortie Q de cette bascule 134 est reliée à l'entrée de commande de présélection PE du compteur 131 et, par l'intermédiaire d'un inverseur 135, à l'entrée de présélection PE du compteur 132. Cette sortie Q de la bascule 134 est également reliée à la sortie 13a du circuit 13.
- Le fonctionnement du circuit de la figure 6 va être maintenant décrit à l'aide de la figure 6a.
- Lorsque la sortie Q de la bascule 134 est à l'état "0", l'entrée PE du circuit 132 est à l'état "1". Le contenu de ce compteur 132 prend donc un état correspondant au contenu de la .mémoire 142, et ce compteur 132 reste bloqué dans cet état, qui est désigné par N 142 à la figure 6a.
- L'entrée PE du compteur 131 est par contre à l'état "0", et ce compteur 131 décompte les impulsions du signal H. Lorsque son contenu atteint la valeur zéro, sa sortie C délivre une impulsion qui est transmise par la porte 133 à l'entrée T de la bascule 134. La sortie Q de cette dernière, et l'entrée PE du compteur 131 passent donc à l'état "1". Le contenu de ce compteur 131 prend donc un état correspondant au contenu de la mémoire 141, et ce compteur 131 se bloque dans cet état, qui est désigné par N 141 à la figure 6a. Simultanément, l'entrée PE du compteur 132 passe à l'état "0". Ce compteur 132 commence à décompter les impulsions du signal H. Lorsque son contenu atteint la valeur zéro, sa sortie C délivre une impulsion qui est transmise par la porte 133 à l'entrée T de la bascule 134. La sortie Q de cette dernière repasse à l'état "0", et le processus décrit ci-dessus recommence.
- La sortie Q de la bascule 134, qui délivre le signal M, passe donc alternativement à l'état "0" et à l'état "1" pendant des durées qui dépendent de la fréquence du signal H et du contenu des mémoires 141, respectivement 142.
- La durée des périodes d'interruption des impulsions motrices, qui est égale à la durée pendant laquelle le signal M est à l'état "1", et la durée des impulsions élémentaires qui séparent ces périodes d'interruption, qui est égale à la durée pendant laquelle le signal M est à l'état "0", peuvent donc être déterminées indépendamment l'une de l'autre. La manière dont ces durées sont déterminées est quelconque. Elles peuvent être fixes ou varier, d'une manière qui ne sera pas décrite ici, en fonction de paramètres tels que la tension de la source d'alimentation 10, ou la charge mécanique entraînée par le moteur, ou tout autre paramètre.
Claims (12)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CH6340/81 | 1981-10-02 | ||
| CH634081A CH646575GA3 (fr) | 1981-10-02 | 1981-10-02 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0076780A1 true EP0076780A1 (fr) | 1983-04-13 |
| EP0076780B1 EP0076780B1 (fr) | 1985-12-27 |
Family
ID=4308021
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP82810396A Expired EP0076780B1 (fr) | 1981-10-02 | 1982-09-23 | Procédé pour réduire la consommation d'un moteur pas à pas et dispositif mettant en oeuvre ce procédé |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US4468602A (fr) |
| EP (1) | EP0076780B1 (fr) |
| JP (1) | JPS5869500A (fr) |
| CH (1) | CH646575GA3 (fr) |
| DE (1) | DE3268162D1 (fr) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0253153A1 (fr) * | 1986-07-02 | 1988-01-20 | Asulab S.A. | Procédé et dispositif de commande d'un moteur pas à pas |
| EP0462241A1 (fr) * | 1990-01-11 | 1991-12-27 | Baxter Int | Entrainement du moteur d'une pompe peristaltique. |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5255247A (en) * | 1988-04-06 | 1993-10-19 | Seiko Epson Corporation | Electronic timepiece including integrated circuitry |
| US5253229A (en) * | 1988-04-06 | 1993-10-12 | Seiko Epson Corporation | Electronic timepiece including integrated circuitry |
| JPH0729513Y2 (ja) * | 1988-04-06 | 1995-07-05 | セイコーエプソン株式会社 | 電子時計用回路 |
| US5247235A (en) * | 1988-06-01 | 1993-09-21 | Detra Sa | Method of supplying power to a single phase step motor |
| JPH0332396A (ja) * | 1989-06-28 | 1991-02-12 | Sharp Corp | ステッピングモータ駆動装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2006995A (en) * | 1977-09-26 | 1979-05-10 | Citizen Watch Co Ltd | Drive system for pulse motor |
| FR2413663A1 (fr) * | 1977-12-28 | 1979-07-27 | Ebauches Sa | Piece d'horlogerie electronique avec systeme de detection de vie des piles |
| FR2458939A1 (fr) * | 1979-06-11 | 1981-01-02 | Seiko Instr & Electronics | Montre electronique |
| DE2944872B1 (de) * | 1979-11-07 | 1981-03-26 | Gebrüder Junghans GmbH, 78713 Schramberg | Anordnung zur Steuerung eines Schrittmotors fuer batteriebetriebene Geraete |
| GB2064898A (en) * | 1979-12-06 | 1981-06-17 | Ebauches Sa | A drive arrangement for a stepping motor |
| EP0060806A1 (fr) * | 1981-03-18 | 1982-09-22 | Asulab S.A. | Procédé pour réduire la consommation d'un moteur pas-à-pas et dispositif pour la mise en oeuvre de ce procédé |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS52154014A (en) * | 1976-06-18 | 1977-12-21 | Hitachi Ltd | Driver circuit for pulse motor |
| CH635973B (fr) * | 1977-01-19 | Suwa Seikosha Kk | Circuit de commande pour un transducteur electromecanique d'une montre, notamment d'une montre-bracelet electronique. | |
| JPS5475519A (en) * | 1977-11-30 | 1979-06-16 | Seiko Instr & Electronics Ltd | Operation detecting circuit of step motor |
| DE2758853C2 (de) * | 1977-12-30 | 1979-08-16 | Dr. Johannes Heidenhain Gmbh, 8225 Traunreut | Vorrichtung zum Messen der Abmessung, z.B. Breite eines Körpers |
| JPS5619473A (en) * | 1979-07-27 | 1981-02-24 | Citizen Watch Co Ltd | Electronic timepiece |
| JPS5643575A (en) * | 1979-09-18 | 1981-04-22 | Seiko Instr & Electronics Ltd | Electronic clock |
-
1981
- 1981-10-02 CH CH634081A patent/CH646575GA3/fr unknown
-
1982
- 1982-09-23 DE DE8282810396T patent/DE3268162D1/de not_active Expired
- 1982-09-23 EP EP82810396A patent/EP0076780B1/fr not_active Expired
- 1982-09-29 US US06/426,361 patent/US4468602A/en not_active Expired - Lifetime
- 1982-10-01 JP JP57171102A patent/JPS5869500A/ja active Granted
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2006995A (en) * | 1977-09-26 | 1979-05-10 | Citizen Watch Co Ltd | Drive system for pulse motor |
| FR2413663A1 (fr) * | 1977-12-28 | 1979-07-27 | Ebauches Sa | Piece d'horlogerie electronique avec systeme de detection de vie des piles |
| FR2458939A1 (fr) * | 1979-06-11 | 1981-01-02 | Seiko Instr & Electronics | Montre electronique |
| DE2944872B1 (de) * | 1979-11-07 | 1981-03-26 | Gebrüder Junghans GmbH, 78713 Schramberg | Anordnung zur Steuerung eines Schrittmotors fuer batteriebetriebene Geraete |
| GB2064898A (en) * | 1979-12-06 | 1981-06-17 | Ebauches Sa | A drive arrangement for a stepping motor |
| EP0060806A1 (fr) * | 1981-03-18 | 1982-09-22 | Asulab S.A. | Procédé pour réduire la consommation d'un moteur pas-à-pas et dispositif pour la mise en oeuvre de ce procédé |
Non-Patent Citations (1)
| Title |
|---|
| IBM TECHNICAL DISCLOSURE BULLETIN, vol. 23, no. 4, septembre 1980, pages 1303-1304, New York (USA); * |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0253153A1 (fr) * | 1986-07-02 | 1988-01-20 | Asulab S.A. | Procédé et dispositif de commande d'un moteur pas à pas |
| EP0462241A1 (fr) * | 1990-01-11 | 1991-12-27 | Baxter Int | Entrainement du moteur d'une pompe peristaltique. |
| EP0462241A4 (en) * | 1990-01-11 | 1993-05-05 | Baxter International Inc. | Peristaltic pump motor drive |
Also Published As
| Publication number | Publication date |
|---|---|
| EP0076780B1 (fr) | 1985-12-27 |
| US4468602A (en) | 1984-08-28 |
| CH646575GA3 (fr) | 1984-12-14 |
| DE3268162D1 (en) | 1986-02-06 |
| JPS5869500A (ja) | 1983-04-25 |
| JPH0564038B2 (fr) | 1993-09-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0679968B1 (fr) | Pièce d'horlogerie mue par une source d'énergie mécanique et régulée par un circuit électronique | |
| EP0171635B1 (fr) | Procédé et dispositif de reconnaissance de la position du rotor d'un moteur pas à pas | |
| FR2605415A1 (fr) | Appareil de controle de l'etat de charge d'une pile | |
| EP0057663B1 (fr) | Dispositif de commande pour moteur pas à pas | |
| FR2604795A1 (fr) | Procede et montage pour mesurer le rapport de resistance d'un demi-pont de resistances | |
| EP0076780B1 (fr) | Procédé pour réduire la consommation d'un moteur pas à pas et dispositif mettant en oeuvre ce procédé | |
| EP0077293B1 (fr) | Procédé et dispositif de commande d'un moteur pas à pas d'une pièce d'horlogerie | |
| FR2489055A1 (fr) | Procede pour reduire la consommation en energie du moteur pas a pas d'une piece d'horlogerie electronique et piece d'horlogerie electronique mettant en oeuvre ce procede | |
| EP0060806B1 (fr) | Procédé pour réduire la consommation d'un moteur pas-à-pas et dispositif pour la mise en oeuvre de ce procédé | |
| FR2510809A1 (fr) | Montage de commande electronique destine a produire un comportement monostable dans un relais bistable | |
| EP0253153B1 (fr) | Procédé et dispositif de commande d'un moteur pas à pas | |
| FR2721456A1 (fr) | Dispositif de mise en Óoeuvre d'un moteur électrique, en particulier un moteur pas à pas permettant de déceler une surcharge ou un état de blocage du moteur électrique. | |
| EP0024737B1 (fr) | Détecteur d'avance d'un moteur pas à pas | |
| EP0135104A1 (fr) | Procédé et dispositif de commande d'un moteur pas-à-pas | |
| EP2403119B1 (fr) | Procédé de commande et système pour compenser les temps-morts dans une commande MLI | |
| EP0859963B1 (fr) | Procede pour determiner l'etat de charge d'une batterie d'accumulateurs | |
| FR2476409A1 (fr) | Piece d'horlogerie avec un dispositif de controle du moteur pas a pas | |
| EP0272965B1 (fr) | Convertisseur fréquence-tension | |
| FR2483142A1 (fr) | Piece d'horlogerie electronique comportant un circuit de controle du moteur | |
| EP0250862A1 (fr) | Procédé et dispositif de commande d'un moteur pas à pas | |
| EP0763884B1 (fr) | Dispositif de commande d'un moteur pas à pas unipolaire permettant la détection du blocage du rotor | |
| EP3222975B1 (fr) | Circuit de détection pour capteur inductif de déplacement | |
| EP0115733A1 (fr) | Procédé de mesure en courant alternatif de l'intensité par rapport à l'intensité nominale, et circuit électronique correspondant | |
| EP1046969B1 (fr) | Procédé de commande d'un moteur pas à pas et dispositif pour la mise en oeuvre de ce procédé | |
| FR2700428A1 (fr) | Circuit de commutation d'un moteur à courant continu sanc collecteur et moteur à courant continu sans collecteur muni d'un tel circuit. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Designated state(s): CH DE FR GB LI |
|
| 17P | Request for examination filed |
Effective date: 19830627 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Designated state(s): CH DE FR GB LI |
|
| REF | Corresponds to: |
Ref document number: 3268162 Country of ref document: DE Date of ref document: 19860206 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19970818 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19970915 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 19970917 Year of fee payment: 16 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19970926 Year of fee payment: 16 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980923 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980930 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980930 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19980923 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19990701 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |