DE102018008564B4 - Vorrichtung und ein Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs - Google Patents
Vorrichtung und ein Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs Download PDFInfo
- Publication number
- DE102018008564B4 DE102018008564B4 DE102018008564.4A DE102018008564A DE102018008564B4 DE 102018008564 B4 DE102018008564 B4 DE 102018008564B4 DE 102018008564 A DE102018008564 A DE 102018008564A DE 102018008564 B4 DE102018008564 B4 DE 102018008564B4
- Authority
- DE
- Germany
- Prior art keywords
- vehicle
- unit
- light signal
- light
- charging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q9/00—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling
- B60Q9/002—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for parking purposes, e.g. for warning the driver that his vehicle has contacted or is about to contact an obstacle
- B60Q9/004—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for parking purposes, e.g. for warning the driver that his vehicle has contacted or is about to contact an obstacle using wave sensors
- B60Q9/005—Arrangement or adaptation of signal devices not provided for in one of main groups B60Q1/00 - B60Q7/00, e.g. haptic signalling for parking purposes, e.g. for warning the driver that his vehicle has contacted or is about to contact an obstacle using wave sensors using a video camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/26—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic
- B60Q1/50—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking
- B60Q1/507—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to indicate the vehicle, or parts thereof, or to give signals, to other traffic for indicating other intentions or conditions, e.g. request for waiting or overtaking specific to autonomous vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2400/00—Special features or arrangements of exterior signal lamps for vehicles
- B60Q2400/50—Projected symbol or information, e.g. onto the road or car body
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Multimedia (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Human Computer Interaction (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
Abstract
Vorrichtung zur Unterstützung einer Positionierung eines Fahrzeugs (1) relativ zu einer fahrzeugexternen Ladeeinheit (2) zum Laden eines elektrischen Energiespeichers des Fahrzeugs (1) mit
- zumindest einer fahrzeugeigenen Kamera zur Erfassung einer Fahrzeugumgebung,
- zumindest einer fahrzeugeigenen Anzeigeeinheit zur Ausgabe eines mittels der zumindest einen Kamera erfassten Bilds (B),
- zumindest einer Lichteinheit zur Emission eines eine Position der Ladeeinheit (2) kennzeichnenden Lichtsignals (S),
- zumindest einer Fahrzeugdetektionseinheit zur Detektion einer Annäherung des Fahrzeugs (1) an die Ladeeinheit (2), wobei die Fahrzeugdetektionseinheit bei Detektion einer Annäherung des Fahrzeugs (1) ein Signal zur Aktivierung der Lichteinheit (2) ausgibt, und
die Kamera das Lichtsignal (S) erfasst,
dadurch gekennzeichnet, dass
eine Datenverarbeitungseinheit das Lichtsignal (S) und eine einer Form des Lichtsignals (S) entsprechende Kontrollmarkierung (M) in das Bild (B) projiziert, wobei die Kontrollmarkierung (M) bei Überdeckung mit dem Lichtsignal (S) ein Erreichen einer Sollposition des Fahrzeugs (1) relativ zur Ladeeinheit (2) darstellt.
- zumindest einer fahrzeugeigenen Kamera zur Erfassung einer Fahrzeugumgebung,
- zumindest einer fahrzeugeigenen Anzeigeeinheit zur Ausgabe eines mittels der zumindest einen Kamera erfassten Bilds (B),
- zumindest einer Lichteinheit zur Emission eines eine Position der Ladeeinheit (2) kennzeichnenden Lichtsignals (S),
- zumindest einer Fahrzeugdetektionseinheit zur Detektion einer Annäherung des Fahrzeugs (1) an die Ladeeinheit (2), wobei die Fahrzeugdetektionseinheit bei Detektion einer Annäherung des Fahrzeugs (1) ein Signal zur Aktivierung der Lichteinheit (2) ausgibt, und
die Kamera das Lichtsignal (S) erfasst,
dadurch gekennzeichnet, dass
eine Datenverarbeitungseinheit das Lichtsignal (S) und eine einer Form des Lichtsignals (S) entsprechende Kontrollmarkierung (M) in das Bild (B) projiziert, wobei die Kontrollmarkierung (M) bei Überdeckung mit dem Lichtsignal (S) ein Erreichen einer Sollposition des Fahrzeugs (1) relativ zur Ladeeinheit (2) darstellt.
Description
- Die Erfindung betrifft eine Vorrichtung zur Unterstützung einer Positionierung eines Fahrzeugs gemäß dem Oberbegriff des Anspruchs 1.
- Die Erfindung betrifft weiterhin ein Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs gemäß dem Oberbegriff des Anspruchs 6.
- Aus der
DE 10 2016 015 458 A1 sind eine Vorrichtung und ein Verfahren zum induktiven Laden eines elektrischen Energiespeichers eines Fahrzeugs bekannt. Die Vorrichtung umfasst eine Ladeplatte, die auf einem befahrbaren Untergrund angeordnet ist und die eine Sendespule umfasst, wobei die Sendespule mit einer fahrzeugseitigen Empfangsspule induktiv koppelbar ist. Weiterhin umfasst die Vorrichtung eine Ladekommunikationseinheit zur Übertragung von Informationen an eine Fahrzeugkommunikationseinheit und eine Überwachungsvorrichtung zur Überwachung einer Umgebung der Ladeplatte. Die Überwachungsvorrichtung weist einen Lichtsender und einen Lichtsensor auf, zwischen denen ein Lichtstrahl zur Ausbildung einer Lichtschranke geführt ist, wobei die Lichtschranke einen Erfassungsbereich zur Überprüfung einer Anwesenheit eines Fahrzeugs definiert. - Weiterhin ist aus der
DE 10 2015 013 204 A1 ein Verfahren zur Positionierung eines Fahrzeugs für einen induktiven Ladevorgang bekannt, bei dem das Fahrzeug von einer Ist-Position zu einer ermittelten Soll-Position geführt wird, wobei das Fahrzeug in der Soll-Position über einer Ladestation zur Durchführung des induktiven Ladevorgangs positioniert wird. Auf einer Anzeigefläche im Fahrzeug werden das Fahrzeug und die Ladestation in einer einer realen Relativposition entsprechenden Position zueinander aus einer Vogelperspektive virtuell dargestellt, wobei eine Anzeige des virtuell dargestellten Fahrzeugs derart verändert wird, dass die virtuell dargestellte Ladestation auf der Anzeigefläche sichtbar ist, wenn das Fahrzeug in einer die Ladestation verdeckenden Position ist und mindestens ein Toleranzbereich um die Ladestation virtuell dargestellt wird, indem der induktive Ladevorgang mit einem einer effizienten induktiven Energieübertragung entsprechenden Wirkungsgrad durchführbar ist. - Ferner beschreibt die
DE 10 2015 208 622 A1 eine Steuervorrichtung und ein Verfahren zum Unterstützen des Führens eines Fahrzeugs beim Auffinden einer bestimmten Zielposition. Die Steuervorrichtung umfasst eine steuervorrichtungsseitige Lokalisierungseinrichtung mit - - einer ersten fahrzeugseitigen Antenne zum Abstrahlen eines ersten Lokalisierungssignals von einer ersten Position am Fahrzeug,
- - einer zweiten fahrzeugseitigen Antenne zum Abstrahlen eines zweiten Lokalisierungssignals von einer zur ersten Position unterschiedlichen zweiten Position am Fahrzeug,
- - einer fahrzeugseitigen Empfangseinrichtung zum Empfangen eines Antwortsignals eines bezüglich des Fahrzeugs externen Transceivers, das Informationen bezüglich der ersten Empfangsfeldstärke des ersten Lokalisierungssignals und der zweiten Empfangsfeldstärke des zweiten Lokalisierungssignals jeweils am Ort des externen Transceivers umfasst,
- - einer fahrzeugseitigen Auswerteeinrichtung zum Ermitteln der relativen Position des Fahrzeugs zum externen Transceiver anhand der ersten und zweiten Empfangsfeldstärke,
- - einer fahrzeugseitigen Ausgabeeinrichtung zum Ausgeben von mit dem Fahrzeug auszuführenden Lenkbefehlen und Fahrbefehlen, um aus den von der ermittelten relativen Position eine mit dem externen Transceiver verbundene Zielposition zu erreichen.
- Aus der
DE 10 2013 207 907 A1 ist ein Verfahren zur Unterstützung der Positionierung einer Sekundärspule eines Fahrzeugs relativ zu einer fahrzeugexternen Primärspule bekannt. Das Verfahren umfasst folgende Schritte: - - Empfangen von Bild-Daten von einer Kamera des Fahrzeugs, wobei die Kamera eingerichtet ist, eine Umgebung des Fahrzeugs zu erfassen;
- - Detektieren der fahrzeugexternen Primärspule in der erfassten Umgebung des Fahrzeugs auf Basis der empfangenen Bild-Daten; und
- - Bereitstellen von Informationen bezüglich der detektierten Primärspule für die Positionierung der Sekundärspule relativ zu der Primärspule.
- Dabei wird eine bildliche Darstellung der Umgebung des Fahrzeugs mit der detektieren Primärspule generiert; wobei in der bildlichen Darstellung die detektierte Primärspule gegenüber der Umgebung des Fahrzeugs graphisch hervorgehoben ist. Die bildliche Darstellung wird auf einem Bildschirm des Fahrzeugs als Top-View Ansicht des Fahrzeugs ausgegeben.
- Die gattungsbildende Schrift
DE 10 2014 201 821 A1 offenbart eine Ladeeinrichtung mit Positionierungshilfe, wobei die Ladeeinrichtung ein Ladestromaufnahmeelement aufweist und an einer Fahrzeugaußenseite angeordnet ist. Die Positionierungshilfe weist eine Lichtquelle auf, die auf einen Raumabschnitt gerichtet ist, welcher zumindest teilweise mit dem Ladestromaufnahmeelement überlappt. Die Lichtquelle wird so angesteuert, dass eine Distanz zwischen dem Ladestromabgabeelement und dem Ladestromaufnahmeelement, anhand unterschiedlicher Farben wiedergeben wird. Hierbei kann die Lichtquelle einen Lichtkegel mit unterschiedlichen Farben an unterschiedlichen Orten des Lichtkegels oder unterschiedliche Helligkeiten an unterschiedlichen Orten des Lichtkegels oder Mustern an unterschiedlichen Orten des Lichtkegels darstellen. - Der Erfindung liegt die Aufgabe zu Grunde, eine verbesserte Vorrichtung und ein verbessertes Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs relativ zu einer fahrzeugexternen Ladeeinheit zum Laden eines elektrischen Energiespeichers des Fahrzeugs anzugeben.
- Hinsichtlich der Vorrichtung wird die Aufgabe erfindungsgemäß durch die im Anspruch 1 angegebenen Merkmale und hinsichtlich des Verfahrens durch die im Anspruch 6 angegebenen Merkmale gelöst.
- Die Vorrichtung zur Unterstützung einer Positionierung eines Fahrzeugs relativ zu einer fahrzeugexternen Ladeeinheit zum Laden eines elektrischen Energiespeichers des Fahrzeugs umfasst zumindest eine fahrzeugeigene Kamera zur Erfassung einer Fahrzeugumgebung und zumindest eine fahrzeugeigene Anzeigeeinheit zur Ausgabe eines mittels der zumindest einen Kamera erfassten Bilds.
- Erfindungsgemäß umfasst die Vorrichtung zumindest eine Lichteinheit zur Emission eines eine Position der Primärspule kennzeichnenden Lichtsignals und zumindest eine Fahrzeugdetektionseinheit zur Detektion einer Annäherung des Fahrzeugs an die Primärspule, wobei die Fahrzeugdetektionseinheit bei Detektion einer Annäherung des Fahrzeugs ein Signal zur Aktivierung der Lichteinheit ausgibt, die Kamera das Lichtsignal in dem Bild erfasst oder eine Datenverarbeitungseinheit das Lichtsignal in das Bild projiziert.
- Hierbei wird gemäß der Erfindung eine einer Form des Lichtsignals entsprechende Kontrollmarkierung mit in das Bild projiziert, wobei die Kontrollmarkierung bei Überdeckung mit dem Lichtsignal ein Erreichen einer Sollposition des Fahrzeugs relativ zur Ladeeinheit darstellt.
- Die Vorrichtung zeichnet sich dabei durch eine besonders hohe Robustheit aus und ermöglicht mit visueller Unterstützung eine einfache und zielgenaue manuelle oder automatische Positionierung des Fahrzeugs zu der Ladeeinheit mit geringer oder keiner Abweichung zu einer Sollposition, so dass ein einfaches und für einen Nutzer komfortables konduktives oder induktives Laden des Energiespeichers mit hohem Wirkungsgrad möglich ist. Auch wird ein automatisiertes Laden, insbesondere mit autonomer Anfahrt des Fahrzeugs an die Ladeeinheit, ermöglicht. Dabei ist die Vorrichtung mit geringem Material- und Kostenaufwand realisierbar.
- Vorteilhafte Ausgestaltungen der Erfindung sind Gegenstand der Unteransprüche.
- Ausführungsbeispiele der Erfindung werden im Folgenden anhand von Zeichnungen näher erläutert.
- Dabei zeigen:
-
1 schematisch ein Bild eines Fahrzeugs, einer Fahrzeugumgebung und einer Ladeeinheit aus einer Vogelperspektive, -
2 schematisch die Ladeeinheit gemäß1 und ein eine Position der Ladeeinheit kennzeichnendes Lichtsignal, -
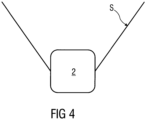
3 schematisch ein weiteres Bild eines Fahrzeugs, einer Fahrzeugumgebung und einer Ladeeinheit aus einer Vogelperspektive und -
4 schematisch die Ladeeinheit gemäß3 und ein eine Position der Ladeeinheit kennzeichnendes Lichtsignal. - Einander entsprechende Teile sind in allen Figuren mit den gleichen Bezugszeichen versehen.
- In
1 ist ein Bild B eines Fahrzeugs 1, einer Fahrzeugumgebung und einer Ladeeinheit 2 aus einer Vogelperspektive insbesondere als so genanntes 360°-Bild dargestellt.2 zeigt die Ladeeinheit 2 gemäß1 und ein eine Position der Ladeeinheit 2 kennzeichnendes Lichtsignal S. - Das Bild B wird anhand von Einzelbildern mehrerer nicht näher dargestellter fahrzeugeigener Kameras oder anhand eines Einzelbildes einer ebenfalls nicht näher dargestellten fahrzeugeigenen Kamera erzeugt und wird mittels einer beispielsweise im Fahrzeuginnenraum angeordneten nicht näher dargestellten Anzeigeeinheit ausgegeben. Die Ausgabe erfolgt beispielsweise zur Unterstützung eines Fahrers des Fahrzeugs 1 beim Rangieren oder Parken, wobei dem Bild B mit einem aktuellen Lenkeinschlag korrespondierende Trajektorien T1, T2 von Vorderrädern und Hinterrädern des Fahrzeugs 1 überlagert dargestellt sind.
- Das Fahrzeug 1 ist ein Elektro- oder Hybridfahrzeug und umfasst zumindest einen nicht näher dargestellten Energiespeicher zur Speicherung elektrischer Energie zum Betrieb zumindest einer ebenfalls nicht näher dargestellten elektrischen Antriebseinheit des Fahrzeugs 1.
- Zu einem induktiven oder konduktiven Aufladen des Energiespeichers ist eine genaue Positionierung des Fahrzeugs 1 relativ zu einer Ladeeinheit 2 erforderlich. Im dargestellten Ausführungsbeispiel ist die Ladeeinheit 2 zu einer induktiven Ladung ausgebildet und umfasst eine nicht näher dargestellte, in eine vor dem Fahrzeug befindliche Bodenfläche integrierte oder auf dieser befindliche Primärspule. Das Fahrzeug 1 umfasst eine nicht näher dargestellte Sekundärspule, welche zur Energieübertragung zur Erzielung eines hohen Wirkungsgrads mit geringer Positionstoleranz oberhalb der Primärspule positioniert werden muss.
- Zur Unterstützung einer manuell vom Fahrer durchgeführten oder einer automatisiert durchgeführten Positionierung des Fahrzeugs 1 relativ zu der fahrzeugexternen Ladeeinheit 2 umfasst das Fahrzeug 1 zumindest eine nicht näher dargestellte fahrzeugeigene Kamera zur Erfassung einer Fahrzeugumgebung. Die Kamera ist beispielsweise am Unterboden des Fahrzeugs 1 angeordnet und in Längsrichtung des Fahrzeugs 1 nach vorn ausgerichtet. Es sind jedoch auch andere geeignete Positionen der Kamera am Fahrzeug 1 möglich. Auch ist es möglich, dass die Kamera Bestandteil eines Systems zur Erzeugung des Bilds B aus der Vogelperspektive ist.
- Weiterhin ist in nicht näher dargestellter Weise zumindest eine Lichteinheit zur Emission eines eine Position der Ladeeinheit 2 kennzeichnenden Lichtsignals S vorgesehen, wobei die Lichteinheit beispielsweise Bestandteil der Ladeeinheit 2 ist. Im dargestellten Ausführungsbeispiel umfasst die Lichteinheit zumindest eine Licht-Projektionseinheit zur Projektion des Lichtsignals S auf die Bodenfläche, wobei das Lichtsignal S im dargestellten Ausführungsbeispiel als so genanntes Fadenkreuz ausgebildet ist. Die Lichteinheit emittiert das Lichtsignal S im sichtbaren Wellenlängenbereich und/oder einem Infrarot-Wellenlängenbereich, wobei ein ausgesendetes Lichtspektrum und eine Form des Lichtsignals S von der Kamera erfassbar sind. Alternativ oder zusätzlich umfasst die Lichteinheit zumindest einen Lichtreflektor zur Erzeugung des Lichtsignals S mittels Reflexion, zumindest eine Lumineszenzeinheit zur Erzeugung des Lichtsignals S mittels Lumineszenz und/oder zumindest eine Fluoreszenzeinheit zur Erzeugung des Lichtsignals S mittels Fluoreszenz.
- Auch kann alternativ oder zusätzlich zu der Projektion des Lichtsignals S auf die Bodenfläche auch zumindest eine Lichtquelle selbst erfasst werden, wobei die Lichtquelle beispielsweise als Lichtleiste oder Lichtpunkt in die Ladeeinheit 2 und/oder in eine diese umgebende Bodenfläche integriert ist und Licht im sichtbaren Wellenlängenbereich und/oder einem Infrarot-Wellenlängenbereich emittiert.
- Zu einer automatischen Aktivierung der Lichteinheit bei Annäherung des Fahrzeugs 1 an die Ladeeinheit 2 ist zumindest eine nicht näher dargestellte Fahrzeugdetektionseinheit zur Detektion der Annäherung des Fahrzeugs vorgesehen. Die Fahrzeugdetektionseinheit ist beispielsweise als ein in die Ladeeinheit 2 integrierter oder in deren Umgebung befindlicher Annäherungsdetektor ausgebildet, welcher auf beliebige Art und Weise ein sich näherndes Fahrzeug 1 erkennt. Die Erkennung der Annäherung kann dabei mittels einer Lichtschranke und/oder mittels anderer Sensoren, beispielsweise Infrarotsensoren, Lasersensoren, Radarsensoren und/oder eine Kamera erfolgen. Auch kann die Fahrzeugdetektionseinheit durch eine Kommunikation des Fahrzeugs 1 mit der Ladeeinheit 2, beispielsweise durch Aussenden eines entsprechenden Funksignals durch das Fahrzeug 1 bei Annäherung, erfolgen.
- Nach der Aktivierung erfasst und erkennt die Kamera, aus deren Einzelbild das Bild B erzeugt wird, das Lichtsignal S, so dass bei einem Lichtsignal S im sichtbaren Wellenlängenbereich dieses mittels der Kamera ebenfalls erfasst und gemeinsam mit dem Bild B erfasst wird. Hierbei kann sich eine Form des Lichtsignals S auf vorgegebene „standardisierte“ Formen beschränken, die fahrzeugseitig hinterlegt sind oder es findet fahrzeugseitig eine allgemeine Formenerkennung des Lichtsignals S statt, die dann entsprechend auf die Position der Ladeeinheit 2 am Fahrzeug 1 umgerechnet und im Bild B dargestellt wird. Bei der Detektion des Fahrzeugs 1 über die Kommunikation mit der Ladeeinheit 2 kann die Form des verwendeten Lichtsignals S zwischen dem Fahrzeug 1 und der Ladeeinheit 2 kommuniziert werden, so dass die Möglichkeit besteht, dass die Ladeeinheit 2 Lichtsignale S mit unterschiedlichen Formen erzeugt und eine entsprechende Form auswählt, welche beispielsweise für ein Fahrzeug 1 eines bestimmten Typs vorteilhaft ist, indem eine Erkennung bei einer solchen Form einfacher und/oder zuverlässiger durchführbar ist.
- Alternativ erfolgt die Erfassung des Lichtsignals S mittels zumindest einer weiteren fahrzeugeigenen Kamera, wobei in diesem Fall das Bild B mit dem erfassten Lichtsignal S überlagert wird, insbesondere, indem eine nicht gezeigte Datenverarbeitungseinheit das Lichtsignal S in das Bild B projiziert.
- Erfindungsgemäß projiziert die Datenverarbeitungseinheit eine der Form des Lichtsignals S entsprechende Kontrollmarkierung M in das Bild B, welche bei Überdeckung mit dem Lichtsignal S ein Erreichen einer Sollposition des Fahrzeugs 1 relativ zur Ladeeinheit 2 darstellt.
- Somit kann der Fahrer das Fahrzeug 1 manuell derart steuern, dass das Lichtsignal S und die Kontrollmarkierung M auf dem Bild B in Überdeckung gelangen. Alternativ kann die Steuerung des Fahrzeugs 1 in einer zumindest teilautonomen Fahrt zumindest teilautomatisiert erfolgen.
- Dabei ist es möglich, dass aus einem Abstand und einer relativen Lage zwischen dem Lichtsignal S und der Kontrollmarkierung M Fahrrichtungsanweisungen und/oder Fahrbefehle ermittelt werden, welche dem Fahrer zusätzlich oder allein angezeigt werden oder in einer zumindest teilautomatisiert durchgeführten Fahrt direkt vom Fahrzeug 1 umgesetzt werden.
- In einer nicht näher dargestellten Ausgestaltung erfolgt die Darstellung des Lichtsignals S und der Ladeeinheit 2 in einem anderen Bild B, welches beispielsweise von einer Frontkamera des Fahrzeugs 1 erfasst wurde. Hierzu erfolgt eine entsprechende Umrechnung der Position und einer Erstreckung des Lichtsignals S auf die entsprechende Perspektive der Frontkamera. Somit ist auch eine Realisierung bei Fahrzeugen 1, welche kein Kamerasystem zur Erzeugung von Bildern B aus der Vogelperspektive umfassen, möglich.
- Um eine Beschädigung der Ladeeinheit 2, der Lichteinheit und gegebenenfalls Komponenten der Fahrzeugdetektionseinheit bei einem Überfahren derselben mit dem Fahrzeug 1 zu vermeiden, sind diese entsprechend überfahrbar ausgebildet.
- In
3 ist ein weiteres Bild B eines Fahrzeugs 1, einer Fahrzeugumgebung U und einer Ladeeinheit 2 aus einer Vogelperspektive dargestellt.4 zeigt die Ladeeinheit 2 gemäß3 und ein eine Position der Ladeeinheit 2 kennzeichnendes Lichtsignal S. - Im Unterschied zu den Darstellungen in den
1 und2 sind das Lichtsignal S und die Kontrollmarkierung M V-förmig ausgebildet. - In nicht näher dargestellten Ausführungsbeispielen sind auch andere beliebig geformte, wie beispielsweise kreuzförmige oder T-kreuzförmige, Lichtsignale S und Kontrollmarkierungen M möglich.
- Bezugszeichenliste
-
- 1
- Fahrzeug
- 2
- Ladeeinheit
- B
- Bild
- M
- Kontrollmarkierung
- S
- Lichtsignal
- T1
- Trajektorie
- T2
- Trajektorie
Claims (6)
- Vorrichtung zur Unterstützung einer Positionierung eines Fahrzeugs (1) relativ zu einer fahrzeugexternen Ladeeinheit (2) zum Laden eines elektrischen Energiespeichers des Fahrzeugs (1) mit - zumindest einer fahrzeugeigenen Kamera zur Erfassung einer Fahrzeugumgebung, - zumindest einer fahrzeugeigenen Anzeigeeinheit zur Ausgabe eines mittels der zumindest einen Kamera erfassten Bilds (B), - zumindest einer Lichteinheit zur Emission eines eine Position der Ladeeinheit (2) kennzeichnenden Lichtsignals (S), - zumindest einer Fahrzeugdetektionseinheit zur Detektion einer Annäherung des Fahrzeugs (1) an die Ladeeinheit (2), wobei die Fahrzeugdetektionseinheit bei Detektion einer Annäherung des Fahrzeugs (1) ein Signal zur Aktivierung der Lichteinheit (2) ausgibt, und die Kamera das Lichtsignal (S) erfasst, dadurch gekennzeichnet, dass eine Datenverarbeitungseinheit das Lichtsignal (S) und eine einer Form des Lichtsignals (S) entsprechende Kontrollmarkierung (M) in das Bild (B) projiziert, wobei die Kontrollmarkierung (M) bei Überdeckung mit dem Lichtsignal (S) ein Erreichen einer Sollposition des Fahrzeugs (1) relativ zur Ladeeinheit (2) darstellt.
- Vorrichtung nach
Anspruch 1 , dadurch gekennzeichnet, dass die Lichteinheit zumindest eine Licht-Projektionseinheit zur Projektion des Lichtsignals (S) auf eine Bodenfläche umfasst. - Vorrichtung nach
Anspruch 1 oder2 , dadurch gekennzeichnet, dass die Lichteinheit - zumindest einen Lichtreflektor zur Erzeugung des Lichtsignals (S) mittels Reflexion, - zumindest eine Lumineszenzeinheit zur Erzeugung des Lichtsignals (S) mittels Lumineszenz und/oder - zumindest eine Fluoreszenzeinheit zur Erzeugung des Lichtsignals (S) mittels Fluoreszenz umfasst. - Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass Lichteinheit ein Lichtsignal (S) im sichtbaren Wellenlängenbereich und/oder einem Infrarot-Wellenlängenbereich emittiert.
- Vorrichtung nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass die zumindest eine Kamera zur Erfassung des Fahrzeugs (1) und der Fahrzeugumgebung aus einer Vogelperspektive ausgebildet ist.
- Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs (1) relativ zu einer fahrzeugexternen Ladeeinheit (2) zum Laden eines elektrischen Energiespeichers eines Fahrzeugs (1), wobei - eine Fahrzeugumgebung erfasst wird, - ein erfasstes Bild (B) zumindest der Fahrzeugumgebung ausgegeben wird, - eine Annäherung des Fahrzeugs (1) an die Ladeeinheit (2) detektiert wird, - bei Detektion des Fahrzeugs (1) zumindest eine Lichteinheit zur Emission eines eine Position der Ladeeinheit (2) kennzeichnenden Lichtsignals (S) aktiviert wird, und - das Lichtsignal (S) mit der Kamera erfasst wird, dadurch gekennzeichnet, dass durch eine Datenverarbeitungseinheit das Lichtsignal (S) und eine einer Form des Lichtsignals (S) entsprechende Kontrollmarkierung (M) in das Bild (B) projiziert wird, wobei zum Erreichen einer Sollposition des Fahrzeugs (1) relativ zur Ladeeinheit (2) die Kontrollmarkierung (M) in Überdeckung mit dem Lichtsignal (S) gebracht werden muss.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018008564.4A DE102018008564B4 (de) | 2018-10-30 | 2018-10-30 | Vorrichtung und ein Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102018008564.4A DE102018008564B4 (de) | 2018-10-30 | 2018-10-30 | Vorrichtung und ein Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| DE102018008564A1 DE102018008564A1 (de) | 2019-04-11 |
| DE102018008564B4 true DE102018008564B4 (de) | 2024-10-02 |
Family
ID=65817011
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| DE102018008564.4A Active DE102018008564B4 (de) | 2018-10-30 | 2018-10-30 | Vorrichtung und ein Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs |
Country Status (1)
| Country | Link |
|---|---|
| DE (1) | DE102018008564B4 (de) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4032066B1 (de) | 2019-09-19 | 2025-04-02 | Continental Autonomous Mobility US, LLC | Automatische kalibrierung einer anhängerkamera |
| EP3795410B1 (de) * | 2019-09-20 | 2022-03-02 | Continental Automotive GmbH | Verfahren und vorrichtung zur anzeige von ego-fahrzeug-umgebungen in einem ego-fahrzeug mit unterstützung der elektrischen aufladung |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013207907A1 (de) | 2013-04-30 | 2014-10-30 | Bayerische Motoren Werke Aktiengesellschaft | Fahrzeugpositionierung für induktives Laden mit Hilfe einer Fahrzeugkamera |
| DE102014201821A1 (de) | 2014-02-03 | 2015-08-06 | Continental Automotive Gmbh | Ladeeinrichtung mit Positionierungshilfe |
| DE102015013204A1 (de) | 2015-10-09 | 2016-03-31 | Daimler Ag | Verfahren zur Positionierung eines Fahrzeugs für einen induktiven Ladevorgang und Ladestation |
| DE102015208622A1 (de) | 2015-05-08 | 2016-11-10 | Continental Automotive Gmbh | Steuervorrichtung zum Unterstützen des Führens eines Fahrzeugs |
| DE102016015458A1 (de) | 2016-12-22 | 2017-08-10 | Daimler Ag | Vorrichtung und Verfahren zum induktiven Laden eines elektrischen Energiespeichers eines Fahrzeugs |
-
2018
- 2018-10-30 DE DE102018008564.4A patent/DE102018008564B4/de active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102013207907A1 (de) | 2013-04-30 | 2014-10-30 | Bayerische Motoren Werke Aktiengesellschaft | Fahrzeugpositionierung für induktives Laden mit Hilfe einer Fahrzeugkamera |
| DE102014201821A1 (de) | 2014-02-03 | 2015-08-06 | Continental Automotive Gmbh | Ladeeinrichtung mit Positionierungshilfe |
| DE102015208622A1 (de) | 2015-05-08 | 2016-11-10 | Continental Automotive Gmbh | Steuervorrichtung zum Unterstützen des Führens eines Fahrzeugs |
| DE102015013204A1 (de) | 2015-10-09 | 2016-03-31 | Daimler Ag | Verfahren zur Positionierung eines Fahrzeugs für einen induktiven Ladevorgang und Ladestation |
| DE102016015458A1 (de) | 2016-12-22 | 2017-08-10 | Daimler Ag | Vorrichtung und Verfahren zum induktiven Laden eines elektrischen Energiespeichers eines Fahrzeugs |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102018008564A1 (de) | 2019-04-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE102015218410B4 (de) | Verfahren und Einrichtung zum Bestimmen der Absolutposition eines Fahrzeuges | |
| DE102013207906A1 (de) | Geführte Fahrzeugpositionierung für induktives Laden mit Hilfe einer Fahrzeugkamera | |
| DE102012220052A1 (de) | Verfahren zur Unterstützung eines Fahrers eines Fahrzeugs bei einem wiederkehrenden Fahrmanöver | |
| DE102014204872B4 (de) | Verfahren und Anzeigesystem zum Anzeigen von Umgebungsinformationen eines Fahrzeugs | |
| DE102017212221A1 (de) | Fernsteuerungsverfahren für ein Fahrerassistenzsystem, Fahrerassistenzsystem und damit versehenes Kraftfahrzeug | |
| DE102019129193A1 (de) | Anwendung einer hilfsbeleuchtung in einem automatischen kupplungsvorgang | |
| DE102013207907B4 (de) | Fahrzeugpositionierung für induktives Laden mit Hilfe einer Fahrzeugkamera | |
| DE102018210340B4 (de) | Verfahren und System zum Ermitteln einer Relativpose zwischen einem Zielobjekt und einem Fahrzeug | |
| DE102019123125A1 (de) | System und verfahren zum rückwärtsbremsen während automatischer kupplungsausrichtung | |
| DE102017223098A1 (de) | Verfahren und Vorrichtung zur Ermittlung eines Relativwinkels zwischen zwei Fahrzeugen | |
| DE102018202526B4 (de) | Verfahren zum Betreiben einer Fahrerassistenzeinrichtung eines Kraftfahrzeugs mithilfe einer Navigationszielvorgabevorrichtung, Steuereinrichtung, Navigationszielvorgabevorrichtung, und Kraftfahrzeug | |
| DE102018221186B4 (de) | Verfahren zum autonomen Parken | |
| DE102018008564B4 (de) | Vorrichtung und ein Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs | |
| DE102016122990A1 (de) | Verfahren zum autonomen Manövrieren eines Kraftfahrzeugs auf einer Parkfläche mit Bestimmung einer Positionsabweichung, Infrastrukturvorrichtung, Fahrerassistenzsystemen, Kraftfahrzeugs sowie Kommunikationssystem | |
| DE102016211227A1 (de) | Verfahren und Fahrzeugsteuersystem zum Erzeugen von Abbildungen eines Umfeldmodells und entsprechendes Fahrzeug | |
| DE102017216127A1 (de) | Verfahren zum Bereitstellen einer Kommunikationsverbindung zwischen einer stationären elektrischen Ladestation und einem Kraftfahrzeug sowie Steuervorrichtung und Ladesystem | |
| DE102017111931A1 (de) | Verfahren zum Überwachen eines Bodenbereichs unterhalb eines Kraftfahrzeugs mittels einer optischen Sensoreinrichtung, Sensorvorrichtung, Fahrerassistenzsystem sowie Kraftfahrzeug | |
| DE102019120599A1 (de) | System und verfahren zur höhenverstellung von anhängern | |
| DE102014219876A1 (de) | Verfahren und Vorrichtung zur Unterstützung eines automatischen Einparkvorganges eines Kraftfahrzeugs | |
| DE102013217718A1 (de) | Ladestation zur induktiven Energieübertragung und Verfahren zum Positionieren einer induktiven Energieübertragungsvorrichtung | |
| DE102017102640A1 (de) | Verfahren zum Erkennen einer Ladevorrichtung zum induktiven Laden eines Energiespeichers eines Kraftfahrzeugs mithilfe einer Kamera des Kraftfahrzeugs, Recheneinrichtung, Fahrzeugassistenzsystem sowie Kraftfahrzeug | |
| DE102020202334A1 (de) | Verfahren zur Positionierung eines Fahrzeugs, Steuergerät für ein Fahrzeug, Fahrzeug, Verfahren zur Unterstützung einer Positionierung eines Fahrzeugs, Induktive Ladestation oder Kontrollvorrichtung | |
| DE102017218191B3 (de) | Einparkhilfe für ein Einparken auf einer Gegenfahrbahn | |
| DE102016013180A1 (de) | Verfahren zum Positionieren eines Kraftfahrzeugs relativ zu einer induktiven Ladeeinrichtung | |
| WO2020074186A1 (de) | Induktives ladesystem und positionierverfahren |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| R230 | Request for early publication | ||
| R012 | Request for examination validly filed | ||
| R081 | Change of applicant/patentee |
Owner name: MERCEDES-BENZ GROUP AG, DE Free format text: FORMER OWNER: DAIMLER AG, 70327 STUTTGART, DE Owner name: DAIMLER AG, DE Free format text: FORMER OWNER: DAIMLER AG, 70327 STUTTGART, DE |
|
| R081 | Change of applicant/patentee |
Owner name: MERCEDES-BENZ GROUP AG, DE Free format text: FORMER OWNER: DAIMLER AG, STUTTGART, DE |
|
| R016 | Response to examination communication | ||
| R018 | Grant decision by examination section/examining division | ||
| R020 | Patent grant now final |