CN216097657U - 一种臂架类工件自动定心夹紧装置 - Google Patents
一种臂架类工件自动定心夹紧装置 Download PDFInfo
- Publication number
- CN216097657U CN216097657U CN202122528474.1U CN202122528474U CN216097657U CN 216097657 U CN216097657 U CN 216097657U CN 202122528474 U CN202122528474 U CN 202122528474U CN 216097657 U CN216097657 U CN 216097657U
- Authority
- CN
- China
- Prior art keywords
- screw rod
- slide rail
- handed
- module
- sliding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Landscapes
- Jigs For Machine Tools (AREA)
Abstract
本实用新型公开了一种臂架类工件自动定心夹紧装置,包括:夹紧座、左夹紧块以及右夹紧块,夹紧座的内部设置有驱动机构,驱动机构包括马达模块、左旋丝杆、右旋丝杆,马达模块设置在夹紧座的内部中间,左旋丝杆、右旋丝杆分别设置在马达模块的两侧。通过启动驱动机构,该驱动机构中的马达模块分别同步地带动左旋丝杆、右旋丝杆转动,而左夹紧块、右夹紧块则在左旋丝杆、右旋丝杆的作用下同步相互靠近将工件自动定心。该自动定心夹紧装置的结构简单,定夹功能可靠、精度高、工艺性好,解决了已往定夹分开结构复杂以及工件品种过多造成的中心不统一等问题,可广泛使用于对臂架类零件粗、精加工的定心。
Description
技术领域
本实用新型涉及机床技术领域,更具体地说,本实用新型涉及一种臂架类工件自动定心夹紧装置。
背景技术
在机械加工过程中,有一些臂架类的工件时需要通过夹具来进行定位和夹紧的,而现有的夹具要么结构比较复杂,要么就是卸载比较麻烦,并且大多不能够实现自定心,往往不能满足条件要求,致使加工精度差。因此,有必要提出一种臂架类工件自动定心夹紧装置,以至少部分地解决现有技术中存在的问题。
实用新型内容
在实用新型内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本实用新型的实用新型内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
为至少部分地解决上述问题,本实用新型提供了一种臂架类工件自动定心夹紧装置,包括:夹紧座、左夹紧块以及右夹紧块,所述夹紧座的内部设置有驱动机构,所述驱动机构包括马达模块、左旋丝杆、右旋丝杆,所述马达模块设置在夹紧座的内部中间,所述左旋丝杆、右旋丝杆分别设置在所述马达模块的两侧,并且与所述马达模块转动连接,所述左夹紧块、右夹紧块均设在所述夹紧座的上部,并与所述左旋丝杆、右旋丝杆转动连接。
根据本实用新型实施例的臂架类工件自动定心夹紧装置,所述马达模块包括液压马达和减速机,所述减速机的输入端与所述液压马达的输出端转动连接,所述减速机的输出端分别与所述左旋丝杆的右端、右旋丝杆的左端转动连接。
根据本实用新型实施例的臂架类工件自动定心夹紧装置,所述左旋丝杆的左端设置有左轴支座模块,所述右旋丝杆的左端设置有右轴支座模块。
根据本实用新型实施例的臂架类工件自动定心夹紧装置,所述左夹紧块通过左滑模块与所述左旋丝杆转动连接,所述左轴支座模块上设置有与所述左滑模块对应的第一左防撞块,所述减速机的左壁上设置有第二左防撞块,所述右夹紧块通过右滑模块与所述右旋丝杆转动连接,所述右轴支座模块上设置有与所述右滑模块对应的第一右防撞块,所述减速机的右壁上设置有第二右防撞块。
根据本实用新型实施例的臂架类工件自动定心夹紧装置,所述左轴支座模块包括左法兰盘、左锁紧螺母以及左轴承座,所述左轴承座设置在所述夹紧座的内部左侧,所述左轴承座内设置有左角接触球轴承和两个左隔套,两个所述左隔套分别左角接触球轴承的两侧,所述左旋丝杆的左端穿过在所述左角接触球轴承和两个左隔套,所述左法兰盘设置在所述左旋丝杆的左端。
根据本实用新型实施例的臂架类工件自动定心夹紧装置,所述左滑模块包括左滑台和左旋螺母,所述左旋螺母螺接在所述左旋丝杆上,所述左滑台的下端与所述左旋螺母连接,所述左夹紧块设置在所述左滑台上。
根据本实用新型实施例的臂架类工件自动定心夹紧装置,所述左滑台的下端设置有左旋螺母安装孔和左竖挡板,所述左旋螺母固定设置在所述左旋螺母安装孔内,所述左竖挡板设置在所述左旋螺母安装孔的左侧,所述左竖挡板设置有与所述左旋丝杆对应的左过孔。
根据本实用新型实施例的臂架类工件自动定心夹紧装置,所述夹紧座内设置有长滑轨、左短滑轨以及右短滑轨,所述左短滑轨、右短滑轨相互间隔地设置在所述长滑轨的一侧,并且所述马达模块设置在所述左短滑轨、右短滑轨之间,所述左旋丝杆设置在所述左短滑轨、长滑轨之间,所述右旋丝杆设置在所述右短滑轨、长滑轨之间,所述左滑台滑动设置在所述左短滑轨、长滑轨上,右滑台滑动设置在所述右短滑轨、长滑轨上。
相比现有技术,本实用新型至少包括以下有益效果:
本实用新型提供了一种臂架类工件自动定心夹紧装置,该臂架类工件自动定心夹紧装置包括夹紧座、左夹紧块以及右夹紧块,该驱动机构包括马达模块、左旋丝杆、右旋丝杆,左旋丝杆、右旋丝杆分别安装在马达模块的两侧,并且与马达模块转动连接;通过启动驱动机构,该驱动机构中的马达模块分别同步地带动左旋丝杆、右旋丝杆转动,而左夹紧块、右夹紧块则在左旋丝杆、右旋丝杆的作用下同步相互靠近,进而将工件自动定心。该臂架类工件自动定心夹紧装置的结构简单,定夹功能可靠、精度高、工艺性好,解决了已往定夹分开结构复杂以及工件品种过多造成的中心不统一等问题,可广泛使用于对臂架类零件粗、精加工的定心。
本实用新型所述的臂架类工件自动定心夹紧装置,本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
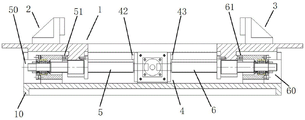
图1为本实用新型的结构主视图。
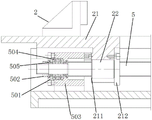
图2为本实用新型的部分内部结构示意图。
图3为本实用新型的结构侧视图。
图4为本实用新型的结构俯视图。
具体实施方式
下面结合附图以及实施例对本实用新型做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
应当理解,本文所使用的诸如“具有”、“包含”以及“包括”术语并不排除一个或多个其它元件或其组合的存在或添加。
如图1-图4所示,本实用新型提供了一种臂架类工件自动定心夹紧装置,包括:夹紧座1、左夹紧块2以及右夹紧块3,所述夹紧座1的内部设置有驱动机构,所述驱动机构包括马达模块4、左旋丝杆5、右旋丝杆6,所述马达模块4设置在夹紧座1的内部中间,所述左旋丝杆5、右旋丝杆6分别设置在所述马达模块4的两侧,并且与所述马达模块4转动连接,所述左夹紧块2、右夹紧块3均设在所述夹紧座1的上部,并与所述左旋丝杆5、右旋丝杆6转动连接。
进一步地,所述夹紧座1内设置有长滑轨10、左短滑轨11以及右短滑轨12,所述左短滑轨11、右短滑轨12相互间隔地设置在所述长滑轨10的一侧,并且所述马达模块4设置在所述左短滑轨11、右短滑轨12之间,所述左旋丝杆5设置在所述左短滑轨11、长滑轨10之间,所述右旋丝杆5设置在所述右短滑轨12、长滑轨10之间,所述左滑台21滑动设置在所述左短滑轨11、长滑轨10上,右滑台31滑动设置在所述右短滑轨12、长滑轨10上。
上述技术方案的工作原理和有益效果:本实用新型提供了一种臂架类工件自动定心夹紧装置,该臂架类工件自动定心夹紧装置包括夹紧座1、左夹紧块2以及右夹紧块3,具体地,该臂架类工件自动定心夹紧装置安装在工作台101上,工作台101上还设置有外支撑块102,由于臂架类工件100的长度较长,所以放置在该夹紧装置以及外支撑块102上,该夹紧座1内设置有长滑轨10、左短滑轨11以及右短滑轨12,夹紧座1的内部设置有驱动机构,该驱动机构包括马达模块4、左旋丝杆5、右旋丝杆6,马达模块4安装在夹紧座1中并位于左短滑轨11、右短滑轨12之间,左旋丝杆5、右旋丝杆6分别安装在马达模块4的两侧,左旋丝杆5位于左短滑轨11、长滑轨10之间,右旋丝杆5位于右短滑轨12、长滑轨10之间,左旋丝杆5、右旋丝杆6并且与马达模块4转动连接,左夹紧块2、右夹紧块3均设在夹紧座1的上部,并与左旋丝杆5、右旋丝杆6转动连接;使用者将臂架类工件100放置好后,然后通过启动驱动机构,该驱动机构中的马达模块4分别同步地带动左旋丝杆5、右旋丝杆6转动,而左夹紧块2、右夹紧块3则在左旋丝杆5、右旋丝杆6的作用下同步相互靠近,进而将工件自动定心。该臂架类工件自动定心夹紧装置的结构简单,定夹功能可靠、精度高、工艺性好,解决了已往定夹分开结构复杂以及工件品种过多造成的中心不统一等问题,可广泛使用于对臂架类零件粗、精加工的定心。
在一个实施例中,所述马达模块4包括液压马达40和减速机41,所述减速机41的输入端与所述液压马达40的输出端转动连接,所述减速机41的输出端分别与所述左旋丝杆5的右端、右旋丝杆6的左端转动连接。
上述技术方案的工作原理和有益效果:本实施例中提供了马达模块4的结构,该结构的马达模块4包括液压马达40和减速机41,具体地,该减速机41的输入端与液压马达40的输出端转动连接,这里减速机41设为双向输出的直角减速机,使得减速机41的输出端分别与左旋丝杆5的右端、右旋丝杆6的左端转动连接;当液压马达40进油时,带动减速机41同时驱动左旋丝杆5及右旋丝杆6,左旋丝杆5及右旋丝杆6分带动左夹紧块2、右夹紧块3作相向或相离运动,进而同步压紧或松开以达到工件自动定心,方便使用。
在一个实施例中,所述左旋丝杆5的左端设置有左轴支座模块50,所述右旋丝杆6的左端设置有右轴支座模块60。
进一步地,所述左轴支座模块50包括左法兰盘501、左锁紧螺母502以及左轴承座503,所述左轴承座503设置在所述夹紧座1的内部左侧,所述左轴承座503内设置有左角接触球轴承504和两个左隔套505,两个所述左隔套505分别左角接触球轴承504的两侧,所述左旋丝杆5的左端穿过在所述左角接触球轴承504和两个左隔套505,所述左法兰盘501设置在所述左旋丝杆5的左端。
上述技术方案的工作原理和有益效果:本实施例中提供了左轴支座模块50、右轴支座模块60的结构,通过左轴支座模块50、右轴支座模块60方便左旋丝杆5及右旋丝杆6的转动;具体地,左旋丝杆5的左端设置有左轴支座模块50,所述右旋丝杆6的左端设置有右轴支座模块60,这里主要以左轴支座模块50为例说明,该左轴支座模块50包括左法兰盘501、左锁紧螺母502以及左轴承座503;
其中,左轴承座503安装在夹紧座1的内部左侧,左轴承座503内设置有左角接触球轴承504和两个左隔套505,两个左隔套505分别左角接触球轴承504的两侧以避免左角接触球轴承504在左轴承座503内发生移动,左旋丝杆5的左端穿过在左角接触球轴承504和两个左隔套505,而左法兰盘501安装设置左旋丝杆5的左端以固定住最左侧的左隔套505,这样当减速机41驱动左旋丝杆5的右端转动时,左旋丝杆5的左端在左轴支座模块50的左轴承座503内可以较好地平稳转动,进而左夹紧块2也可以平稳地移动。
在一个实施例中,所述左夹紧块2通过左滑模块20与所述左旋丝杆5转动连接,所述左轴支座模块50上设置有与所述左滑模块20对应的第一左防撞块51,所述减速机41的左壁上设置有第二左防撞块42,
所述右夹紧块3通过右滑模块30与所述右旋丝杆6转动连接,所述右轴支座模块60上设置有与所述右滑模块30对应的第一右防撞块61,所述减速机41的右壁上设置有第二右防撞块43。
上述技术方案的工作原理和有益效果:本实施例中提供了左滑模块20、右滑模块30的结构,以方便左夹紧块2、右夹紧块3在夹紧座1上移动,具体地,左夹紧块2通过左滑模块20与左旋丝杆5转动连接,当左旋丝杆5带动左滑模块20移动到最左侧时,左轴支座模块50上安装有第一左防撞块51,所以左滑模块20可以接触到第一左防撞块51,而不会直接接触到左轴支座模块50以避免将左轴支座模块50碰撞损坏,起到保护作用;减速机41的左壁上设置有第二左防撞块42,左滑模块20也可以接触到第二左防撞块42,而不会直接接触到减速机41,以避免将减速机41碰撞损坏,起到保护作用;
同理,右夹紧块3通过右滑模块30与右旋丝杆6转动连接,右轴支座模块60上设置有与右滑模块30对应的第一右防撞块61,减速机41的右壁上设置有第二右防撞块43,这样右夹紧块3则会分别接触第一右防撞块61、第二右防撞块43,而不会直接接触右轴支座模块60、减速机41,起到保护作用。
在一个实施例中,所述左滑模块20包括左滑台21和左旋螺母22,所述左旋螺母22螺接在所述左旋丝杆5上,所述左滑台21的下端与所述左旋螺母22连接,所述左夹紧块2设置在所述左滑台21上。
上述技术方案的工作原理和有益效果:本实施例中提供了左滑模块20的具体结构,该左滑模块20包括左滑台21和左旋螺母22,左滑台21的底部与左旋螺母22连接,而左旋螺母22螺接在左旋丝杆5上,所以左旋丝杆5转动时带动左旋螺母22移动,进而左旋螺母22带动左滑台21沿着左短滑轨11、长滑轨10上移动,以实现对左滑模块20对左夹紧块2移动。同理,右滑模块30可以采用与上述左滑模块20相同的结构,如该右滑模块30包括右滑台31和右旋螺母,右滑台31在右短滑轨12、长滑轨10上滑动地移动,具体工作原理与上述相同。
在一个实施例中,所述左滑台21的下端设置有左旋螺母安装孔211和左竖挡板212,所述左旋螺母22固定设置在所述左旋螺母安装孔211内,所述左竖挡板212设置在所述左旋螺母安装孔211的左侧,所述左竖挡板212设置有与所述左旋丝杆5对应的左过孔。
上述技术方案的工作原理和有益效果:本实施例中进一步地提供了左滑台21的结构,在左滑台21的下端设有左旋螺母安装孔211和左竖挡板212,这里将左旋螺母22固定安装在左旋螺母安装孔211内,而左竖挡板212则安装在左旋螺母安装孔211的左侧,左竖挡板212的上端通过螺栓与左滑台21连接,同时左竖挡板212设置有与左旋丝杆5对应的左过孔,以方便左旋丝杆5穿过左竖挡板212和左旋螺母22;通过上述左旋螺母安装孔211和左竖挡板212,方便了左旋螺母22的安装,以及将左旋螺母22保护起来。
在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节与这里示出与描述的图例。
Claims (8)
1.一种臂架类工件自动定心夹紧装置,其特征在于,包括:夹紧座(1)、左夹紧块(2)以及右夹紧块(3),所述夹紧座(1)的内部设置有驱动机构,所述驱动机构包括马达模块(4)、左旋丝杆(5)、右旋丝杆(6),所述马达模块(4)设置在夹紧座(1)的内部中间,所述左旋丝杆(5)、右旋丝杆(6)分别设置在所述马达模块(4)的两侧,并且与所述马达模块(4)转动连接,所述左夹紧块(2)、右夹紧块(3)均设在所述夹紧座(1)的上部,并与所述左旋丝杆(5)、右旋丝杆(6)转动连接。
2.根据权利要求1所述的臂架类工件自动定心夹紧装置,其特征在于,所述马达模块(4)包括液压马达(40)和减速机(41),所述减速机(41)的输入端与所述液压马达(40)的输出端转动连接,所述减速机(41)的输出端分别与所述左旋丝杆(5)的右端、右旋丝杆(6)的左端转动连接。
3.根据权利要求2所述的臂架类工件自动定心夹紧装置,其特征在于,所述左旋丝杆(5)的左端设置有左轴支座模块(50),所述右旋丝杆(6)的左端设置有右轴支座模块(60)。
4.根据权利要求3所述的臂架类工件自动定心夹紧装置,其特征在于,所述左夹紧块(2)通过左滑模块(20)与所述左旋丝杆(5)转动连接,所述左轴支座模块(50)上设置有与所述左滑模块(20)对应的第一左防撞块(51),所述减速机(41)的左壁上设置有第二左防撞块(42),所述右夹紧块(3)通过右滑模块(30)与所述右旋丝杆(6)转动连接,所述右轴支座模块(60)上设置有与所述右滑模块(30)对应的第一右防撞块(61),所述减速机(41)的右壁上设置有第二右防撞块(43)。
5.根据权利要求3所述的臂架类工件自动定心夹紧装置,其特征在于,所述左轴支座模块(50)包括左法兰盘(501)、左锁紧螺母(502)以及左轴承座(503),所述左轴承座(503)设置在所述夹紧座(1)的内部左侧,所述左轴承座(503)内设置有左角接触球轴承(504)和两个左隔套(505),两个所述左隔套(505)分别左角接触球轴承(504)的两侧,所述左旋丝杆(5)的左端穿过在所述左角接触球轴承(504)和两个左隔套(505),所述左法兰盘(501) 设置在所述左旋丝杆(5)的左端。
6.根据权利要求4所述的臂架类工件自动定心夹紧装置,其特征在于,所述左滑模块(20)包括左滑台(21)和左旋螺母(22),所述左旋螺母(22)螺接在所述左旋丝杆(5)上,所述左滑台(21)的下端与所述左旋螺母(22)连接,所述左夹紧块(2)设置在所述左滑台(21)上。
7.根据权利要求6所述的臂架类工件自动定心夹紧装置,其特征在于,所述左滑台(21)的下端设置有左旋螺母安装孔(211)和左竖挡板(212),所述左旋螺母(22)固定设置在所述左旋螺母安装孔(211)内,所述左竖挡板(212)设置在所述左旋螺母安装孔(211)的左侧,所述左竖挡板(212)设置有与所述左旋丝杆(5)对应的左过孔。
8.根据权利要求6所述的臂架类工件自动定心夹紧装置,其特征在于,所述夹紧座(1)内设置有长滑轨(10)、左短滑轨(11)以及右短滑轨(12),所述左短滑轨(11)、右短滑轨(12)相互间隔地设置在所述长滑轨(10)的一侧,并且所述马达模块(4)设置在所述左短滑轨(11)、右短滑轨(12)之间,所述左旋丝杆(5)设置在所述左短滑轨(11)、长滑轨(10)之间,所述右旋丝杆(6)设置在所述右短滑轨(12)、长滑轨(10)之间,所述左滑台(21)滑动设置在所述左短滑轨(11)、长滑轨(10)上,右滑台(31)滑动设置在所述右短滑轨(12)、长滑轨(10)上。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122528474.1U CN216097657U (zh) | 2021-10-20 | 2021-10-20 | 一种臂架类工件自动定心夹紧装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122528474.1U CN216097657U (zh) | 2021-10-20 | 2021-10-20 | 一种臂架类工件自动定心夹紧装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN216097657U true CN216097657U (zh) | 2022-03-22 |
Family
ID=80694456
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202122528474.1U Active CN216097657U (zh) | 2021-10-20 | 2021-10-20 | 一种臂架类工件自动定心夹紧装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN216097657U (zh) |
-
2021
- 2021-10-20 CN CN202122528474.1U patent/CN216097657U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12090595B2 (en) | Horizontal five-axis plate conversion machining center | |
| CN113909919B (zh) | 一种加工前轴双主轴五轴联动加工中心 | |
| CN216097657U (zh) | 一种臂架类工件自动定心夹紧装置 | |
| CN220428157U (zh) | 一种工装夹具装置 | |
| CN211516123U (zh) | 一种机械加工用钻孔装置 | |
| CN216097662U (zh) | 一种双向浮动夹紧单元 | |
| CN207616120U (zh) | 竖直旋转交换工作台 | |
| CN111805008A (zh) | 一种数控螺旋锥齿轮铣齿机 | |
| CN206652975U (zh) | 一种高效率高精度钢管两端自动车孔机床 | |
| CN219358812U (zh) | 一种机电制造用侧部夹紧装置 | |
| CN220481989U (zh) | 一种板材加工用平钻 | |
| CN220739487U (zh) | 一种立式车床夹具夹紧装置 | |
| CN220240070U (zh) | 一种车削设备 | |
| CN220806789U (zh) | 一种双头螺栓加工设备 | |
| CN214602329U (zh) | 花键加工设备 | |
| CN221338194U (zh) | 一种外型侧夹式夹紧定位装置 | |
| CN220372697U (zh) | 一种实现机床工作台快速定位的装置 | |
| CN218744985U (zh) | 一种飞机零部件打孔装置 | |
| CN219053153U (zh) | 一种多工位线切割机 | |
| CN116618977B (zh) | 一种龙门框架移动式加工中心的主轴加工工艺 | |
| CN217776274U (zh) | 钻床加工定位装置 | |
| CN218254815U (zh) | 一种轴类工件检测设备 | |
| CN220806420U (zh) | 一种数控机床加工用辅助装置 | |
| CN221435695U (zh) | 一种c型支架数控加工工装 | |
| CN220006884U (zh) | 一种轴类工件加工装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |