CN215838852U - 基站和清洁机器人系统 - Google Patents
基站和清洁机器人系统 Download PDFInfo
- Publication number
- CN215838852U CN215838852U CN202121975624.7U CN202121975624U CN215838852U CN 215838852 U CN215838852 U CN 215838852U CN 202121975624 U CN202121975624 U CN 202121975624U CN 215838852 U CN215838852 U CN 215838852U
- Authority
- CN
- China
- Prior art keywords
- cleaning
- base station
- track
- groove
- assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Landscapes
- Cleaning In General (AREA)
Abstract
本实用新型公开了一种基站和清洁机器人系统。其中,基站包括:基站本体和清洗组件;其中,基站本体上设置有槽口侧向设置的轨道槽,清洗组件被配置为沿轨道槽运行,清洗组件上设置有清洗件,清洗件通过与清洁机器人的清洁系统的干涉,以对所述清洁机器人的清洁系统进行清洗;轨道槽位于下方的内壁面朝向轨道槽的外部向下倾斜。由此,降低了污水和杂物残留在轨道槽内的可能性,有利于提高轨道槽的使用寿命,并提高清洗组件相对于基站本体运行的顺畅性。
Description
技术领域
本实用新型涉及智能家居技术领域,尤其涉及一种基站和一种清洁机器人系统。
背景技术
目前的基站,通常会设置可移动的清洗件对扫拖一体清洁机器人的平面拖布进行清洗,但是,在清洗过程中,会有污水或杂物残留在清洗件运行的轨道槽中,影响清洗件运行的可靠性。
实用新型内容
在实用新型内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本实用新型的此部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
本实用新型第一方面的实施例,提供了一种基站,用于清洗清洁机器人的清洁系统,该基站包括:基站本体和清洗组件,其中,基站本体上设置有槽口侧向设置的轨道槽,清洗组件被配置为沿轨道槽运行,清洗组件上设置有清洗件,清洗件通过与清洁机器人清洁系统的干涉,对清洁机器人的清洁系统进行清洗。
可选地,基站本体包括位于清洗组件下方的清洁槽,轨道槽设置于清洁槽的内壁上;其中,轨道槽位于下方的内壁面朝向清洁槽的内部向下倾斜。
可选地,轨道槽的数量为两个,两个轨道槽沿基站本体的横向相对设置。
可选地,轨道槽内设置齿条,清洗组件通过齿条沿轨道槽运行。
可选地,齿条设置于轨道槽位于上方的内壁上。
可选地,清洗组件包括驱动部和支架,支架上设置有与驱动部联动的第一齿轮,第一齿轮与齿条啮合以使支架沿轨道槽运行。
可选地,支架上设置有支撑部,支撑部与第一齿轮沿轨道槽的延伸方向间隔分布,支撑部包括被配置为沿轨道槽运行的支撑轮。
可选地,基站还包括与基站本体可拆卸连接的轨道,轨道设置有轨道槽和齿条,齿条与轨道为一体式结构。
可选地,清洗组件还设置有轨道清洁件。
可选地,轨道清洁件设置于清洗组件的侧部;轨道清洁件向清洗组件的外侧倾斜设置。
可选地,清洁槽设置有排污口,清洗组件还包括朝向清洁槽的槽底设置的清理件,清理件用于将清洁槽内的杂物向排污口靠拢。
可选地,清洗件包括设置于支架上的第一清洗件和第二清洗件;其中,第一清洗件和第二清洗件通过与清洁机器人的清洁系统的干涉,将清洁系统上的杂物移除。
可选地,驱动部还与第二清洗件驱动连接,以驱动第二清洗件相对于支架转动。
可选地,清洗组件还包括:出液装置,出液装置排出的清洗液体用于清洗清洁系统后容置于清洁槽。
本实用新型第二方面的实施例,提供了一种清洁机器人系统,包括:清洁机器人,包括清洁系统;以及第一方面任一项的基站,清洗组件用于清洁清洁系统。
根据本实用新型实施例所提供的基站和清洁机器人系统,通过在基站本体上设置有轨道槽,清洗组件配置为沿轨道槽运行,使得清洗组件能够沿基站本体移动,实现对清洁系统的自动清洁,省去了人工清洁清洁系统或更换新的清洁系统的操作,简化了人工操作,提升了人工的清洁体验。通过轨道槽的槽口侧向设置,且轨道槽位于下方的内壁面与槽口连通,并朝向轨道槽的外部向下倾斜,使得清洗组件在清洁清洁机器人的清洁系统过程中落入轨道槽内的污水和杂质,会在倾斜设置的轨道槽位于下方的内壁面的引导下流出轨道槽的外部,降低了污水和杂物残留在轨道槽内导致清洗组件相对于基站本体运行不顺畅、腐蚀轨道槽的可能性,有利于提高轨道槽的使用寿命,并提高清洗组件相对于基站本体运行的顺畅性和可靠性。
上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
附图说明
本实用新型的下列附图在此作为本实用新型实施例的一部分用于理解本实用新型。附图中示出了本实用新型的实施例及其描述,用来解释本实用新型的原理。
附图中:
图1为根据本实用新型的一个可选实施例的清洁机器人系统的结构示意图;
图2为根据本实用新型的一个可选实施例的清洁机器人的结构示意图;
图3为图2所示实施例的一个视角的结构示意图;
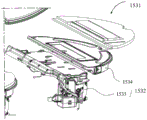
图4为图3所示实施例的部分爆炸示意图;
图5为根据本实用新型的一个可选实施例的基站的结构示意图;
图6为图5所示实施例的一个视角的结构示意图;
图7为图6所示实施例的又一个视角的部分结构示意图;
图8为根据本实用新型的一个可选实施例的基站本体的部分结构示意图;
图9为图8所示实施例的A处的局部放大示意图;
图10为图8所示实施例的一个视角的剖视图;
图11为图8所示实施例的又一个视角的结构示意图;
图12为根据本实用新型的一个可选实施例的轨道的结构示意图;
图13为图12所示实施例的一个视角的结构示意图;
图14为根据本实用新型的一个可选实施例的清洗组件的结构示意图;
图15为图14所示实施例的一个视角的结构示意图;
图16为图14所示实施例的又一个视角的结构示意图;
图17为根据本实用新型的另一个可选实施例的清洗组件的结构示意图;
图18为根据本实用新型的又一个可选实施例的清洗组件的结构示意图;
图19为根据本实用新型的再一个可选实施例的清洗组件的结构示意图。
附图标记说明
10清洁机器人,110机器主体,111前向部分,112后向部分,120感知系统,121确定装置,122缓冲器,130控制模块,140驱动系统,141驱动轮模块,142从动轮,150清洁系统,151干式清洁系统,152边刷,153湿式清洁系统,1531清洁头,1532驱动单元,1533驱动平台,1534支撑平台,160能源系统,170人机交互系统,20基站,21基站本体,211排污口,212清洁槽,22轨道,221齿条,222轨道槽,223第一内壁面,30清洗组件,31第一清洗件,32支架,33第二清洗件,34驱动部,341第一齿轮,342电机,345第一转轴,35出液装置,351出液口,36清理件,37支撑部,38轨道清洁件,381清扫件,382安装部,383第一轨道清洁件,382第二轨道清洁件,40供液部。
具体实施方式
在下文的描述中,给出了大量具体的细节以便提供对本实用新型所提供的技术方案更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本实用新型所提供的技术方案可以无需一个或多个这些细节而得以实施。
应予以注意的是,这里所使用的术语仅是为了描述具体实施例,而非意图限制根据本实用新型的示例性实施例。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式。此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在所述特征、整体、步骤、操作、元件和/或组件,但不排除存在或附加一个或多个其他特征、整体、步骤、操作、元件、组件和/或它们的组合。
现在,将参照附图更详细地描述根据本实用新型的示例性实施例。然而,这些示例性实施例可以多种不同的形式来实施,并且不应当被解释为只限于这里所阐述的实施例。应当理解的是,提供这些实施例是为了使得本实用新型的公开彻底且完整,并且将这些示例性实施例的构思充分传达给本领域普通技术人员。
如图1至图19所示,本实用新型的实施例提供了一种基站20和一种清洁机器人10系统,其中,如图1所示,清洁机器人系统包括清洁机器人10和基站20,即基站20与清洁机器人10配合使用。
进一步地,如图2和图3所示,清洁机器人10可以包括机器主体110、感知系统120、控制模块130、驱动系统140、清洁系统150、能源系统160和人机交互系统170。可以理解的是,清洁机器人10可以为自移动清洁机器人或满足要求的其他清洁机器人。自移动清洁机器人是在无使用者操作的情况下,在某一待清洁区域自动进行清洁操作的设备。其中,当自移动清洁机器人开始工作时,自移动清洁设备从基站20出发进行清洁任务。当自移动清洁机器人10完成清洁任务或其他需要中止清洁任务的情况时,自移动清洁机器人10可以返回基站20进行充电或其他操作。
如图2所示,机器主体110包括前向部分111和后向部分112,具有近似圆形形状(前后都为圆形),也可具有其他形状,包括但不限于前方后圆的近似D形形状及前方后方的矩形或正方形形状。
如图2所示,感知系统120包括位于机器主体110上的位置确定装置121、设置于机器主体110的前向部分111的缓冲器122上的碰撞传感器、近距离传感器,设置于机器主体110下部的悬崖传感器,以及设置于机器主体110内部的磁力计、加速度计、陀螺仪、里程计等传感装置,用于向控制模块130提供机器的各种位置信息和运动状态信息。位置确定装置121包括但不限于摄像头、激光测距装置(LDS,全称Laser Distance Sensor)。
如图2所示,机器主体110的前向部分111可承载缓冲器122,在清洁过程中驱动轮模块141推进清洁机器人10在地面行走时,缓冲器122经由设置在其上的传感器系统,例如红外传感器,检测清洁机器人10的行驶路径中的一个或多个事件,清洁机器人10可通过由缓冲器122检测到的事件,例如障碍物、墙壁,而控制驱动轮模块141使清洁机器人10来对事件做出响应,例如远离障碍物。
控制模块130设置在机器主体110内的电路主板上,包括与非暂时性存储器,例如硬盘、快闪存储器、随机存取存储器,通信的计算处理器,例如中央处理单元、应用处理器,应用处理器根据激光测距装置反馈的障碍物信息利用定位算法,例如即时定位与地图构建(SLAM,全称Simultaneous Localization And Mapping),绘制清洁机器人10所在环境中的即时地图。并且结合缓冲器122上所设置传感器、悬崖传感器、磁力计、加速度计、陀螺仪、里程计等传感装置反馈的距离信息、速度信息综合判断清洁机器人10当前处于何种工作状态、位于何位置,以及清洁机器人10当前位姿等,如过门槛,上地毯,位于悬崖处,上方或者下方被卡住,尘盒满,被拿起等等,还会针对不同情况给出具体的下一步动作策略,使得清洁机器人10有更好的清扫性能和用户体验。
如图3所示,驱动系统140可基于具有距离和角度信息(例如x、y及θ分量)的驱动命令而操纵机器主体110跨越地面行驶。驱动系统140包含驱动轮模块141,驱动轮模块141可以同时控制左轮和右轮,为了更为精确地控制机器的运动,优选驱动轮模块141分别包括左驱动轮模块和右驱动轮模块。左、右驱动轮模块沿着由机器主体110界定的横向轴设置。为了清洁机器人10能够在地面上更为稳定地运动或者更强的运动能力,清洁机器人10可以包括一个或者多个从动轮142,从动轮142包括但不限于万向轮。驱动轮模块141包括行走轮和驱动马达以及控制驱动马达的控制电路,驱动轮模块141还可以连接测量驱动电流的电路和里程计。驱动轮可具有偏置下落式悬挂系统,以可移动方式紧固,例如以可旋转方式附接到机器主体110,且接收向下及远离机器主体110偏置的弹簧偏置。弹簧偏置允许驱动轮以一定的着地力维持与地面的接触及牵引,同时清洁机器人10的清洁元件也以一定的压力接触地面。
能源系统160包括充电电池,例如镍氢电池和锂电池。充电电池可以连接有充电控制电路、电池组充电温度检测电路和电池欠压监测电路,充电控制电路、电池组充电温度检测电路、电池欠压监测电路再与单片机控制电路相连。主机通过设置在机身侧方或者下方的充电电极与充电桩连接进行充电。
人机交互系统170包括主机面板上的按键,按键供用户进行功能选择;还可以包括显示屏和/或指示灯和/或喇叭,显示屏、指示灯和喇叭向用户展示当前机器所处状态或者功能选择项;还可以包括手机客户端程序。对于路径导航型自动清洁设备,在手机客户端可以向用户展示设备所在环境的地图,以及机器所处位置,可以向用户提供更为丰富和人性化的功能项。
清洁系统150可为干式清洁系统151和/或湿式清洁系统153。
如图3所示,本实用新型实施例所提供的干式清洁系统151可以包括滚刷、尘盒、风机、出风口。与地面具有一定干涉的滚刷将地面上的垃圾扫起并卷带到滚刷与尘盒之间的吸尘口前方,然后被风机产生并经过尘盒的有吸力的气体吸入尘盒。干式清洁系统151还可包括具有旋转轴的边刷152,旋转轴相对于地面成一定角度,以用于将碎屑移动到清洁系统150的滚刷区域中。
如图3和图4所示,本实用新型实施例所提供的湿式清洁系统153可以包括:清洁头1531、驱动单元1532、送水机构、储液箱等。其中,清洁头1531可以设置于储液箱下方,储液箱内部的清洁液通过送水机构传输至清洁头1531,以使清洁头1531对待清洁平面进行湿式清洁。在本实用新型其他实施例中,储液箱内部的清洁液也可以直接喷洒至待清洁平面,清洁头1531通过将清洁液涂抹均匀实现对平面的清洁。
其中,清洁头1531用于清洁待清洁表面,驱动单元1532用于驱动清洁头1531沿着目标面基本上往复运动的,目标面为待清洁表面的一部分。清洁头1531沿待清洁表面做往复运动,清洁头1531与待清洁表面的接触面表面设有清洁布或清洁板,通过往复运动与待清洁表面产生高频摩擦,从而去除待清洁表面上的污渍。
在本实用新型提供的实施例中,如图5所示,基站20包括基站本体21和清洗组件30,其中,清洗组件30可以移动地设置在基站本体21上。具体地,清洗组件30能够相对于基站本体21移动,如清洗组件30能够沿基站20左右方向往复运动,基站20的左右方向如图5中的实线箭头所示,图5中的虚线箭头所示方向为基站20的前后方向。清洗组件30包括清洗件,清洗件用于通过与清洁机器人10的清洁及系统150的干涉以将清洁系统150上的杂物移除,以实现对清洁系统150的清洁。
具体地,如图8、图9、图10和图11所示,通过在基站本体21上设置有轨道槽222,清洗组件30配置为沿轨道槽222运行,可以理解的是,清洗组件30配置为能够沿轨道槽222往复运行,使得清洗组件30能够沿基站本体21移动,进而通过清洗组件30与清洁机器人10的清洁系统150进行干涉,实现对清洁系统150的自动清洁。也就是说,清洁机器人10能够在基站20的清洗组件30上实现自动清洁,进而省去了人工清洁清洁系统150或更换新的清洁系统150的操作,简化了人工操作,提升了人工的清洁体验,并有利于降低清洁成本,适于推广应用。
如图9、图12和图13所示,轨道槽222的槽口侧向设置,即轨道槽222的槽口位于基站本体21的侧面,定义轨道槽222位于下方的内壁面为第一内壁面223,通过第一内壁面223朝向轨道槽222的外部向下倾斜,使得清洗组件30在清洁清洁机器人10的清洁系统150过程中落入轨道槽222内的污水和杂质,会在倾斜设置的第一内壁面223的引导下流出轨道槽的外部,即倾斜设置的第一内壁面223具有一定的引导作用,污水和杂物并不会长时间残留在轨道槽222内而导致轨道槽222被腐蚀、损坏,或影响清洗组件30相对于基站本体21运行的顺畅性,因此,有利于提高轨道槽222的使用寿命,并提高清洗组件30相对于基站本体21运行的顺畅性和可靠性。同时,将轨道槽222位于下方的内壁面朝向轨道槽222的外部向下倾斜,便于加工,易于实现,结构简单,成本较低,适于推广应用。
在上述实施例中,如图8、图9、图10、图11所示,基站本体21包括位于清洗组件30下方的清洁槽212,清洁槽212用于容置清洗组件30从清洁机器人10的清洁系统150上移除的杂物,和/或用于收集清洁清洁系统150过程中产生的污水,进而方便对杂物和污水进行后续处理,并有利于提高基站20附近环境的清洁性。可以理解的是,从清洁系统150上移除的杂物可以包括污水、毛发、碎屑、颗粒灰尘、或满足要求的其他杂物,本实用新型不做具体限定。
通过轨道槽222设置在清洁槽212的内壁上,使得轨道槽222位于清洁槽212的内部,即清洗组件30能够沿轨道槽222在清洁槽212的上方移动,进而使得清洗组件30清洁清洁系统150过程中的污水和杂物能够可靠地落入清洁槽212内,降低污水和杂物落入清洁槽212外部而造成二次污染的可能性,有利于提高清洗组件30的清洁效果。
如图10和图13所示,通过轨道槽222位于下方的内壁面朝向清洁槽212的内部向下倾斜,即第一内壁面223朝向清洁槽212的内部向下倾斜,使得清洗组件30在对清洁机器人10的清洁系统150进行清洁过程中,污水和杂物进入轨道槽222之后不容易残留在第一内壁面223上,即污水和杂物会在倾斜设置的第一内壁面223的引导下,流入清洁槽212的内部,进而降低了污水和杂物残留在轨道槽222内导致清洗组件30相对于基站本体21运行不顺畅、腐蚀轨道槽222的可能性,有利于提高清洗组件30相对于基站20运行的顺畅性和可靠性,并有利于提高轨道22的使用寿命。同时,轨道槽222内的杂物和污水在第一内壁面223的引导下流入清洁槽,降低了污水和杂物落入清洁槽212的外部而造成二次污染的可能性,同时,便于对清洁槽212内的杂物进行集中处理,以提高杂物的处理效率。
在本实用新型提供的实施例中,轨道槽222的数量为两个,两个轨道槽222沿基站本体21的横向相对设置。其中,基站本体21的横向方向如图5中的前后方向所示,也就是说,两个轨道槽222分布在基站本体的前后两端,轨道槽222的延伸方向与基站本体21的左右方向平行,清洗组件30沿两个轨道槽222运行以确保清洗组件30相对于基站本体21运行的可靠性和稳定性。可以理解的是,两个轨道槽222位于清洗组件的两端。
在本实施例中,如图9和图11所示,轨道槽222内设置齿条221,清洗组件30通过齿条221沿轨道槽222运行,即齿条221设置在轨道槽222的内部,这样的设置,减小了齿条221和轨道槽222之间的尺寸,有利于减小基站本体21的体积,进而能够满足基站20结构紧凑的设置需求,扩大产品的使用范围。
进一步地,齿条221设置于轨道槽222位于上方的内壁上,即为清洗组件30相对于基站本体21运行确定运行方向和提供运行动力的齿条221设置在轨道槽222的上壁面,而轨道槽222与上壁面相对设置的下壁面,能够为清洗组件30相对于基站本体21运行提供支撑力,由于轨道槽222的下壁面与齿条221相比为较为光滑的壁面,这样的设置,避免了齿条221设置在轨道槽222的下壁面,使得清洗组件30在清洁清洁机器人10的清洁系统150的过程中,杂物落在齿条221上难以清理、影响清洗组件30相对于基站本体21运行顺畅性的问题。
也就是说,通过齿条221设置于轨道槽222位于上方的内壁面,有利于降低轨道槽222的清洁难度,进而有利用确保清洁槽212具有较高的清洁性,并提高清洗组件30沿轨道槽222运行的顺畅性和可靠性。同时,有利于减小清洗组件30相对于轨道槽222运行过程中产生的噪音,提升用户的使用体验。
在本实用新型的一示例中,如图12和图13所示,基站20还包括与基站本体21可拆卸连接的轨道22,轨道22设置有轨道槽222和齿条221,即将为清洗组件30相对于基站本体21运行确定运行方向和提供运行动力的齿条221、以及为清洗组件30相对于基站本体21运行提供支撑力的轨道槽222均设置在轨道22上,有利于降低基站20的装配难度,提高生产效率,并能够减小清洗组件30运行产生的噪音,适于推广应用。
进一步地,轨道22与基站本体21可拆卸连接,使得可以将轨道22从基站本体21上拆卸下来进行维修、清理、更换,进而有利于提高维修效率,提升清理体验,并降低换件成本,适于推广应用。
一方面,通过齿条221与轨道22为一体式结构,简化了齿条221与轨道22的装配操作,有利于进一步减小轨道22的装配难度。
另一方面,齿条221与轨道22为分体式结构,即可以将齿条221安装在轨道22的合适位置处,进而便于将齿条221从轨道22上拆卸下料对齿条221进行清理和维修,同时便于对轨道槽222进行清理和维修,操作简单,有利于降低维修成本,提高清洁体验。
在本实用新型提供的一些可能实现的实施例中,清洗组件30包括驱动部34和支架32,支架32上设置有与驱动部34联动的第一齿轮341,驱动部34用于驱动第一齿轮341与齿条221啮合以使支架32沿轨道槽222运行,其中,驱动部34能够驱动第一齿轮341在齿条221上沿正反两个方向移动,进而带动清洗组件30的支架32沿轨道槽222能够往复运行,这样的设置,有利于提高清洗组件30清洁清洁系统150的清洁效果。
其中,通过第一齿轮341与齿条221之间的啮合,驱动部34驱动第一齿轮341在齿条221上以预定方向移动,而清洗组件30沿轨道槽222运行。
具体地,如图14和图15所示,驱动部34包括电机342和第一转轴345,电机342和第一转轴345驱动连接,即电机342工作能够驱动第一转轴345转动,第一转轴345穿设于支架32,第一转轴345的两端设置有与齿条221啮合的第一齿轮341,因此,通过电机342驱动第一转轴345转动,第一转轴345两端的第一齿轮341与齿条221啮合,带动支架32沿两个轨道槽222相对于基站本体21移动,进而实现对清洁机器人10的清洁系统150的清洗。进一步地,电机342能够驱动第一转轴345正转或反转,进而使得支架32能够沿轨道槽222往复运行,以提高清洗组件30对清洁系统150的清洁效果。
可以理解的是,第一齿轮341可以与第一转轴345为一体式结构,这样的设置,简化了第一齿轮341与第一转轴345装配的操作,有利于提高生产效率,或者,第一齿轮341与第一转轴345为分体式结构,即第一齿轮341可拆卸的设置于第一转轴345上,这样的设置,方便将第一齿轮341从第一转轴345上拆卸下来进行维修和更换,有利于降低维修换件成本。对于第一齿轮341与第一转轴345的具体连接方式,本实用新型不做具体限定。
在本实施例中,进一步地,如图14和图16所示,支架32上还设置有支撑部37,支撑部37与第一齿轮341沿轨道槽222的延伸方向间隔分布,也就是说,支撑部37分布在支架32靠近轨道22的两侧,支撑部37包括远离支架32设置的支撑轮,支撑轮位于轨道槽222内,使得支撑轮沿轨道22运行对清洗组件30进行支撑,有利于提高清洗组件30相对于基站本体21运行的稳定性,同时,支撑部37的设置,使得支撑部37和第一齿轮341同时对支架32进行支撑,进而有利于减小第一齿轮341的支撑力,提高第一齿轮341的寿命,并有利于减小第一齿轮341沿齿条221运行过程中的噪音。
也就是说,本实用新型实施例提供的基站20,驱动部34驱动第一转轴345转动,第一齿轮341与基站本体21轨道22上的齿条221啮合带动支架32相对于基站本体21运行,同时,支撑部37的支撑轮沿轨道槽222运行,进而,大大提高了支架32沿轨道槽222运行的可靠性和平稳性,适于推广应用。
在本实用新型提供的一些可能实现的实施例中,如图14、图15和图16所示,清洗组件30还包括用于清洁轨道槽222的轨道清洁件38,由于杂物和污水粘附、残留在轨道槽222内部会腐蚀、损坏轨道槽,并影响清洗组件30沿轨道槽222运行的顺畅性的情况,因此,利用轨道清洁件38来清洁轨道槽222,将轨道槽222内的杂物和污水及时排出,能够降低杂物和污水残留、堆积在轨道槽222内的可能性,进而提高清洗组件30在轨道槽222内运行的顺畅性和可靠性,有利于提高清洗组件30的清洁效率,并有利于延长轨道槽222的使用寿命,提高基站20的可靠性。
也就是说,本实用新型实施例提供的基站20,通过轨道槽222位于下方的内壁面对轨道槽222内的污水和杂物进行引导使其容易流出轨道槽222,并通过轨道清洁件38对轨道槽222进行清洁,能够使轨道槽222内的污水和杂物快速、彻底地流出轨道槽222外,进而提高轨道槽222的清洁性,即本实用新型通过双重结构来确保轨道槽222具有较高的清洁性,进而提高轨道槽222的使用寿命,以及清洗组件30运行的可靠性。
其中,一方面,轨道清洁件38可以与轨道槽222分离设置,如轨道清洁件38可以是单独设置的,或者可拆卸的设置在清洗组件上,当轨道槽222较为脏污时,或基站本体21使用一段时间后存在杂物残留在轨道槽222的情况下,操作工人可以手持轨道清洁件38对轨道槽222进行清扫,并在清扫完毕后将轨道清洁件38移除轨道槽222进行收纳,操作简单,使用方便。可以理解的是,轨道清洁件也可以设置在满足要求的其他结构上。
另一方面,轨道清洁件38可以设置在清洗组件30上,具体地,清洗组件30包括沿轨道槽222运行的支架32,轨道清洁件38设置在清洗组件30的支架32上,即轨道清洁件38随着清洗组件30的支架32的移动而移动,因此,当清洗组件30沿轨道槽222运行对清洁系统150进行清洁时,利用轨道清洁件38对轨道槽222进行清洗,简化了人工手持轨道清洁件38清洁轨道槽222的操作,增大了清洗组件30的功能,适于推广应用。
在本实施例中,轨道清洁件38设置于清洗组件30上,包括位于轨道槽222内的清扫件381,因此,当清洗组件30沿轨道槽222运行的过程中,轨道清洁件38位于轨道槽222内部的清扫件381也沿轨道槽222移动,进而对轨道槽222进行清洁,避免了污水或杂物长时间残留在轨道槽222内使轨道槽222腐蚀、生锈的情况发生,有利于提高轨道槽222的使用寿命,同时,避免了杂物和污水影响清洗组件30相对于轨道槽222运行的顺畅性的问题,进而有利于提高清洗组件30相对于轨道槽222运行的顺畅性和可靠性,有利于确保清洗组件30较高的清洁效率。可以理解的是,清扫件381可以为刷毛、橡胶片、刮条或满足要求的其他清洁结构,本实用新型不做具体限定。
在上述实施例中,轨道清洁件38设置于清洗组件30的侧部,清洗组件30位于两个侧部之间的端部用于与轨道槽222可移动连接,这样,在清洗组件30相对于轨道槽222移动过程中,设置在清洗组件30侧部的轨道清洁件38位于清洗组件30的端部的运行方向的前方,即轨道清洁件38能够对清洗组件30的端部相匹配的部分轨道槽222提前进行清扫,有利于提高清洗组件30沿轨道槽222运行的顺畅性和可靠性。
在本实施例中,轨道清洁件38向清洗组件30的外侧倾斜设置,即轨道清洁件38沿轨道槽222的延伸方向朝向轨道槽222的端部倾斜设置,有利于提高轨道清洁件38清洁轨道槽222的彻底性和有效性。如当轨道清洁件38垂直于轨道槽222的延伸方向设置于清洗组件30上,即轨道清洁件38垂直于清洗组件30的运动方向设置时,随着清洗组件30沿轨道槽222左右运动,轨道清洁件38更多地是将轨道槽222内的杂质推向轨道槽222的两端,无法很好地将杂物从轨道槽222内清除。而本实施例中,轨道清洁件38向清洗组件30的外侧倾斜设置,即轨道清洁件38沿轨道槽222的延伸方向向轨道槽222的端部倾斜设置,当清洗组件30沿轨道槽222左右运动时,轨道清洁件38可以较好地将轨道槽222内杂质清出至轨道槽222的外部,进而提高轨道清洁件38清洁轨道槽222的彻底性和有效性,有利于延长轨道槽222的使用寿命,并提高清洗组件30沿轨道槽222运行的顺畅性和可靠性。
在本实用新型提供的一些可能实现的实施例中,由于轨道槽的数量为两个,轨道清洁件38可分布于支架32朝向轨道槽222的任一侧,也可在支架32朝向轨道槽222的两侧均设置有轨道清洁件38,这样,通过轨道清洁件38能够对两个轨道槽222进行清洁,进一步提高支架32相对于基站本体21运行的顺畅性和可靠性。
在本实用新型的一示例中,一方面,支架32朝向同一轨道槽222的一侧设置有一个轨道清洁件38,即利用一个轨道清洁件38对一条轨道槽222进行清洁。其中,图14为本实用新型一实施例中清洗组件30的结构示意图,在该图中,轨道清洁件38朝向轨道槽222的一个端部倾斜设置。在图16中,轨道清洁件38设置于支架32靠近轨道槽222左端部的位置,则轨道清洁件38朝向轨道槽222的左端部倾斜设置。在本实用新型其他实施例中,若轨道清洁件38位于支架32靠近轨道槽222右端部的位置处,则轨道清洁件38朝向轨道槽222的右端部倾斜设置。
当轨道清洁件38倾斜设置于支架32的左端部时,当支架32带动轨道清洁件38向左运动时,倾斜设置的轨道清洁件38可顺利将轨道槽222内的杂物清除。
另一方面,如图17所示,支架32朝向同一轨道槽222的一侧设置有两个轨道清洁件38,即利用两个轨道清洁件38对一条轨道槽222进行清洁,有利于提高轨道槽222的清洁效率和清洁效果。其中,两个轨道清洁件38包括第一轨道清洁件383和第二轨道清洁件384,轨道槽222包括第一端部和第二端部,第一轨道清洁件383朝向轨道槽222的第一端部倾斜设置,并位于支架32靠近第一端部的位置处,第二轨道清洁件384朝向轨道槽222的第二端部倾斜设置,并位于支架32靠近第二端部的位置处。如第一端部为轨道槽222的左端部,第二端部为轨道槽222的右端部,第一轨道清洁件383位于支架32靠近轨道槽222左端部的位置处,第二轨道清洁件384位于支架32靠近轨道槽222右端部的位置处,即第一轨道清洁件383位于第二轨道清洁件384的左侧,第一轨道清洁件383向轨道槽222的左端部倾斜设置,第二轨道清洁件384向轨道槽222的右端部倾斜设置。
这样的设置,当清洗组件30沿轨道槽222左右运动时,位于支架32两端的轨道清洁件38可以较好地将轨道22内杂质清除出轨道22。如当清洗组件30沿轨道槽222向左移动时,在第一轨道清洁件383的作用下,能够将轨道槽222内的杂物和污水向轨道槽222的左端部靠拢,由于第一轨道清洁件383向轨道槽222的左端部倾斜设置,进而能够将位于轨道槽222左端部的杂物和污水清理出轨道槽222,确保轨道槽222清洁的彻底性。反之,当清洗组件30沿轨道槽222向右移动时,在第二轨道清洁件384的作用下,能够将轨道槽222内的杂物和污水向轨道槽222的右端部靠拢,由于第二轨道清洁件384向轨道槽222的右端部倾斜设置,进而能够将位于轨道槽222右端部的杂物和污水清理出轨道槽222,确保轨道槽222清洁的彻底性。
也就是说,通过在支架32朝向同一轨道槽222的一侧设置第一轨道清洁件383和第二轨道清洁件384,第一轨道清洁件383和第二轨道清洁件384位于支架32的两侧并朝向支架的外部倾斜,这样,在清洗组件30沿轨道槽222左右往复移动的过程中,两个轨道清洁件38分别在各自所对应的部分轨道槽222内将杂物和污水彻底、可靠地清除至轨道槽222的外部,进而确保轨道槽222具有较高的清洁性,有利于延长轨道槽222的使用寿命,并提高清洗组件30相对于基站本体21运行的顺畅性和可靠性,适于推广应用。
可以理解的是,对于两条轨道槽222,可以在支架32朝向两条轨道槽222的任一侧分别设置一个轨道清洁件38或两个轨道清洁件38,举例而言,如图15所示,支架32的两侧分别设置有一个轨道清洁件38,或者,如图19所示,支架32的两侧分别设置有两个轨道清洁件38,或者,如图18所示,支架32的一侧设置有一个轨道清洁件38,支架32的另一侧设置有两个轨道清洁件38,轨道清洁件38的不同设置数量,能够满足清洗组件30不同结构、轨道槽222不同清洁能力的需求,扩大了产品的使用范围。
在本实用新型提供的一些可能实现的实施例中,如图16所示,轨道清洁件38包括与清扫件381连接的安装部382,安装部382与清洗组件30可拆卸连接,即安装部382连接清扫件381和清洗组件30,由于清扫件381位于轨道槽222内,因此,在清洗组件30沿轨道槽222移动的过程中,通过安装部382带动清扫件381沿轨道槽222移动,实现对轨道槽222的清洁,结构简单,成本较低。
通过安装部382与清洗组件30可拆卸连,可以将连接有清扫件381的安装部382从清洗组件30上拆卸下来进行维修、清理、更换,操作简单,有利于降低维修、换件成本,并提升轨道清洁件38的清洁体验。具体地,可拆卸连接可以通过螺栓螺纹连接、卡勾卡扣等满足要求的其他连接结构实现,本实用新型不做具体限定。
在本实用新型提供的一些可能实现的实施例中,如图6所示,清洁槽212设置有排污口211,排污口211位于清洁槽212的至少一侧,通过排污口211,能够将清洁槽212内的杂物和污水移除至清洁槽212的外部。
如图15所示,清洗组件30还包括清理件36,清理件36朝向清洁槽212的槽底,通过清理件36将清洁槽212内的杂物向排污口211靠拢,如通过清理件36与清洁槽212的槽底抵接,清洗组件30在沿轨道槽222运行的过程中,清理件36将清洁槽212内的杂物向排污口211靠拢,使得杂物能够集中、快速、顺畅地经排污口211排出,进而有利于提高基站20的排污效率和排污效果,提高用户使用的满意度。
可以理解的是,基站20还可以包括排污机构,排污机构与排污口211连通,以通过排污机构的抽吸动作、泵送动作等将清洁槽212内的杂物通过排污口211输送至清洁槽212的外部,进一步提高基站20的排污效果。具体地,排污机构可以包括风机组件或泵体组件,或满足要求的排污组件,本实用新型不做具体限定。
进一步地,基站20还包括收集箱,收集箱通过排污口211与清洁槽212相连通,从而将清洁槽212内的杂物通过排污机构输送至收集箱,以免清洁槽212内的杂物溢出而影响清洗件的清洁效果,并造成工作环境脏污,收集箱的设置,有利于保证良好的清洁效果,并利于对收集的杂物进行集中处理。
在本实用新型的一示例中个,如图14和图16所示,清洗组件30还包括设置于支架32上的第一清洗件31和第二清洗件33,其中,第一清洗件31和第二清洗件33是不同的结构,由于支架32在驱动部34的驱动下能够沿设置在基站本体21上的轨道槽222移动,因此,支架32作为一个移动部件,能够带动第一清洗件31和第二清洗件33随之相对于基站本体21移动,进而使得第一清洗件31与清洁机器人10的清洁系统150进行干涉、第二清洗件33通过与清洁系统150进行干涉,将清洁系统150上的杂物移除,即清洁机器人10能够在清洗组件上实现自动清洁。可以理解的是,第一清洗件31和第二清洗件33将清洁系统150上的杂物移除后,杂物会落入清洁槽212内。
其中,第一清洗件31包括清洗刮子,清洗刮子与清洁系统150干涉,能够将清洁系统150上的杂物移除。第二清洗件33包括清洗辊子,且清洗辊子相对于支架32可转动地设置,清洗滚子与清洁系统150干涉,能够将清洁系统150上的杂物移除。进一步地,清洗辊子外表面设置毛刷和/或叶片,毛刷和/或叶片可以深入清洁系统150,将藏于其中的脏污带出,进一步提高清洁效果。
其中,第二清洗件33和第一清洗件31平行设置在支架32上。第二清洗件33可以平行设置于第一清洗件31的任何一侧,如存在多个第二清洗件33,第二清洗件33也可以平行分布于第一清洗件31的任何一侧或两侧,或者,存在多个第一清洗件31,第一清洗件31可以平行分布于第二清洗件33的任何一侧或两侧。
在本实用新型的一示例中,驱动部34驱动支架32沿轨道槽222往复运动过程中,第二清洗件33可以始终处于第一清洗件31的前方。该种设置,可以使第二清洗件33首先对清洁系统150(如清洁头)的待清洗部位进行清洗,即第二清洗件33的刷毛或叶片在第二清洗件33的转动过程中对清洁头产生拍打效应,导致藏纳于清洁头内的杂物在拍打效应产生的震动中被抖出并被刮除,随后,第一清洗件31的刮子对清洁头中被带出或被抖出的杂物、以及清洁头上的污水进行刮除,保证清洁头可以被较为彻底地清洗。
在本实用新型提供的一些可能实现的实施例中,驱动部34还与第二清洗件33驱动连接,以驱动第二清洗件33相对于支架32转动,也就是说驱动部34的电机342驱动第一转轴345转动,带动支架32沿轨道槽222移动时,电机342驱动第二清洗件33相对于支架32转动。因此,使得利用一个电机342能够同时驱动支架32相对于基站本体21的移动,并驱动第二清洗件33相对于支架32转动,如第二清洗件33的自转运动,简化了一个驱动部34的设置,能够满足产品结构紧凑的设计需求,并有利于降低成本,适于推广应用。
在本实施例中,驱动部34驱动清洗组件30沿轨道槽222左右移动以及驱动第二清洗件33的转动通过电机342配合多级齿轮实现。如驱动部34包括电机342和齿轮传动组件,电机342通过齿轮传动组件驱动支架32移动的同时第二清洗件33转动,即驱动齿轮组件和第二清洗件33同步转动。
在本实施例中,电机342可以实现正转与反转,因此可以驱动支架32沿两个相反的方向进行移动,同时会驱动第二清洗件33沿两个方向进行转动(即顺时针的转动以及逆时针的转动)。例如,电机342可以驱动支架32相对于基站本体21向左移动的同时,驱动第二清洗件33顺时针转动;电机342也可以驱动支架32相对于基站本体21向右移动的同时,驱动第二清洗件33逆时针转动。需要说明的是,对于上述各个齿轮的类型和大小此处不作限定,可以根据实际需求进行相应的选择。
在本实用新型提供的一些可能实现实施例中,如图14所示,清洗组件30还包括出液装置35,在清洗组件30对清洁机器人10的清洁系统150进行清洗过程中,清洗组件30的出液装置35可以同时工作,出液装置35将清洗液喷洒至清洁系统150上,利用清洗液的冲击力对清洁系统150进行清洗,或者利用清洗液浸润清洁系统150,进而在清洗件对清洁系统150进行清洁的过程中,提高清洁效果。
进一步地,出液装置35可以将清洗液喷洒在第二清洗件33上,由于第二清洗件33通过转动与清洁机器人10的清洁系统150接触,因此,出液装置35喷洒在第二清洗件33上的清洗液,可以通过第二清洗件33的自转将清洗液均匀涂抹至清洁系统150上,进而保证良好的清洁效果。可以理解的是,出液装置35也可以将清洗液同时喷洒在清洁系统150和第二清洗件33上,以进一步提高清洁系统150的浸润效率。
可以理解的是,由于清洗组件30位于清洁槽212的上方,因此,清洗液在清洗清洁系统150后会容置于清洁槽212内,并由清洁槽212的排水口排出。
在上述实施例中,基站20的出液装置35移动设置,如出液装置35随着支架32沿轨道槽222运行,可以将清洗液更为均匀地喷洒或涂抹至清洁机器人10的清洁系统150和/或第二清洗件33上,使清洗组件30在清洗清洁机器人10的清洁系统150时,提高清洁效果和清洗效率。可以理解的是,为了确保清洁机器人10和基站20用电的安全性,应避免清洗液体溢出而流入外部环境,或者流入到清洁机器人10的相关电力部件上。
进一步地,基站20还包括供液部40和送液通道,送液通道的一端用于连通供液部40,送液通道的另一端连通出液装置35,以使供液部40通过送液通道将清洗液体送入出液装置35;其中,送液通道的至少部分随支架32可移动地设置。供液部40实现了对清洗液体的存储,而送液通道为一个传输部件,将清洗液传输至出液装置35。
进一步地,送液通道为送液管,送液管与支架32相连接,即在支架32上设置有出液装置35,送液管的两端分别连通供液部40和出液装置35,以此实现供液。其中,送液通道设置泵体,供液部40内的清洗液体在泵体的作用下输送至出液装置35,可以保证清洗液体具有一定的冲击力,以此提高清洗能力。
在本实用新型的实施例中,如图14所示,出液装置35上间隔设置有多个出液口351,清洗液体通过出液口351排出,并能够实现多个位置处的出液,提高清洗效率。
一方面,出液装置35属于支架32的一部分,多个出液口351间隔地设置在支架32上,以此实现对多个位置处的出液。另一方面,出液装置35可以固定设置于基站本体21上,例如,出液装置35可以包括多个出液口351,出液口351沿着基站本体21从左至右排布。当清洗组件30相对于基站本体21左右移动时,出液口351的出液顺序以及出液频率可以根据清洗组件的移动方向和移动速度设置,以保证清洗组件在清洗清洁机器人10的湿式清洁系统153时,待清洁部分可以被提前浸湿,提高清洁效率。除此以外,还可以为出液口351设置水压调整装置和/或水温调整装置,根据待清洁物体的脏污程度等因素调节出液口351的水压和/或水温,以进一步提高清洁效率。
在上述实施例中,出液装置35的出液口351可以朝向第一清洗件31和第二清洗件33中的至少之一,由出液口351排出的清洗液体能够冲击第一清洗件31和第二清洗件33中的至少之一,以对其进行清洁。即出液口351不仅作为清洗液体进入清洁槽212的通道,且出液口351还能够使得水流冲击第一清洗件31、第二清洗件33以及清洁机器人10湿式清洁系统153的清洁头中的至少之一,以此实现对其相应的清洁。
在本实用新型的实施例中,如图14所示,第一清洗件31和第二清洗件33并列设置,出液装置35的出液口351位于第一清洗件31下方并朝向第二清洗件33,出液口351将供液部40中的清洗液体喷至第二清洗件33,并通过第二清洗件33的自转与清洁机器人10的湿式清洁系统153的清洁头产生干涉,将清洗液涂抹至清洁头。可以理解的是,出液装置35的出液口351的出液方向可以朝向清洁头,直接将清洗液体喷洒至清洁头,利用清洗液对清洁头的冲击,并配合第一清洗件31和第二清洗件33,实现对清洁头的清洗。
本实用新型已经通过上述实施例进行了说明,但应当理解的是,上述实施例只是用于举例和说明的目的,而非意在将本实用新型限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本实用新型并不局限于上述实施例,根据本实用新型的教导还可以做出更多种的变型和修改,这些变型和修改均落在本实用新型所要求保护的范围以内。本实用新型的保护范围由附属的权利要求书及其等效范围所界定。
Claims (15)
1.一种基站,用于清洗清洁机器人的清洁系统,其特征在于,所述基站包括:
基站本体和清洗组件;其中,
所述基站本体上设置有槽口侧向设置的轨道槽,所述清洗组件被配置为沿所述轨道槽运行,所述清洗组件上设置有清洗件,所述清洗件通过与所述清洁机器人的清洁系统的干涉,以对所述清洁机器人的清洁系统进行清洗;
所述轨道槽位于下方的内壁面朝向所述轨道槽的外部向下倾斜。
2.根据权利要求1所述的基站,其特征在于,
所述基站本体包括位于所述清洗组件下方的清洁槽,所述轨道槽设置于所述清洁槽的内壁上;
其中,所述轨道槽位于下方的内壁面朝向所述清洁槽的内部向下倾斜。
3.根据权利要求1或2所述的基站,其特征在于,
所述轨道槽的数量为两个,所述两个轨道槽沿所述基站本体的横向相对设置。
4.根据权利要求3所述的基站,其特征在于,所述轨道槽内设置齿条,所述清洗组件通过所述齿条沿所述轨道槽运行。
5.根据权利要求4所述的基站,其特征在于,所述齿条设置于所述轨道槽位于上方的内壁上。
6.根据权利要求5所述的基站,其特征在于,
所述清洗组件包括驱动部和支架,所述支架上设置有与所述驱动部联动的第一齿轮,所述第一齿轮与所述齿条啮合以使所述支架沿所述轨道槽运行。
7.根据权利要求6所述的基站,其特征在于,
所述支架上设置有支撑部,所述支撑部与所述第一齿轮沿所述轨道槽的延伸方向间隔分布,所述支撑部包括被配置为沿所述轨道槽运行的支撑轮。
8.根据权利要求4至7中任一项所述的基站,其特征在于,
所述基站还包括与所述基站本体可拆卸连接的轨道,所述轨道设置有所述轨道槽和所述齿条,所述齿条与所述轨道为一体式结构。
9.根据权利要求1所述的基站,其特征在于,所述清洗组件还设置有轨道清洁件。
10.根据权利要求9所述的基站,其特征在于,
所述轨道清洁件设置于所述清洗组件的侧部,所述轨道清洁件向所述清洗组件的外侧倾斜设置。
11.根据权利要求2所述的基站,其特征在于,
所述清洁槽设置有排污口,所述清洗组件还包括朝向所述清洁槽的槽底设置的清理件,所述清理件用于将所述清洁槽内的杂物向所述排污口靠拢。
12.根据权利要求6所述的基站,其特征在于,
所述清洗件包括
设置于所述支架上的第一清洗件和第二清洗件;
其中,所述第一清洗件和第二清洗件通过与清洁机器人的清洁系统的干涉,将所述清洁系统上的杂物移除。
13.根据权利要求12所述的基站,其特征在于,
所述驱动部还与所述第二清洗件驱动连接,以驱动所述第二清洗件相对于所述支架转动。
14.根据权利要求2所述的基站,其特征在于,所述清洗组件还包括:
出液装置,所述出液装置排出的清洗液体用于清洗所述清洁系统后容置于所述清洁槽。
15.一种清洁机器人系统,其特征在于,包括:
清洁机器人,包括清洁系统;以及
如权利要求1至14中任一项所述的基站,所述清洗组件用于清洗所述清洁系统。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202121975624.7U CN215838852U (zh) | 2021-08-20 | 2021-08-20 | 基站和清洁机器人系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202121975624.7U CN215838852U (zh) | 2021-08-20 | 2021-08-20 | 基站和清洁机器人系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN215838852U true CN215838852U (zh) | 2022-02-18 |
Family
ID=80241227
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202121975624.7U Active CN215838852U (zh) | 2021-08-20 | 2021-08-20 | 基站和清洁机器人系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN215838852U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023019975A1 (zh) * | 2021-08-20 | 2023-02-23 | 北京石头世纪科技股份有限公司 | 基站和清洁机器人系统 |
-
2021
- 2021-08-20 CN CN202121975624.7U patent/CN215838852U/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023019975A1 (zh) * | 2021-08-20 | 2023-02-23 | 北京石头世纪科技股份有限公司 | 基站和清洁机器人系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN215838853U (zh) | 基站和清洁机器人系统 | |
| EP3542695B1 (en) | Base station and cleaning robot system | |
| CN213883079U (zh) | 一种湿式清洁组件及自动清洁设备 | |
| CN107510417B (zh) | 自动清洁机 | |
| CN215993841U (zh) | 基站和清洁机器人系统 | |
| CN218044978U (zh) | 清洁机器人 | |
| CN112690713B (zh) | 一种自动清洁设备 | |
| CN217365718U (zh) | 清洁机器人 | |
| CN217365717U (zh) | 清洁机器人 | |
| CN217365716U (zh) | 清洁机器人 | |
| CN217338454U (zh) | 清洁机器人 | |
| CN215838852U (zh) | 基站和清洁机器人系统 | |
| CN215838851U (zh) | 基站和清洁机器人系统 | |
| CN216317428U (zh) | 基站和清洁机器人系统 | |
| CN216135813U (zh) | 基站和清洁机器人系统 | |
| CN215959618U (zh) | 一种自动清洁设备 | |
| CN215650867U (zh) | 基站及清洁机器人系统 | |
| CN117958674A (zh) | 清洁机器人 | |
| CN217365730U (zh) | 基站和清洁机器人系统 | |
| CN116919260A (zh) | 清洁机器人 | |
| CN116919259A (zh) | 清洁机器人 | |
| CN116919257A (zh) | 清洁机器人 | |
| CN214760900U (zh) | 一种拖布结构及清洁机器人 | |
| CN220344321U (zh) | 清洗盘、基站和清洁机器人系统 | |
| CN116919258A (zh) | 清洁机器人 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |