CN212447846U - 一种四向行走搬运车 - Google Patents
一种四向行走搬运车 Download PDFInfo
- Publication number
- CN212447846U CN212447846U CN201921946815.3U CN201921946815U CN212447846U CN 212447846 U CN212447846 U CN 212447846U CN 201921946815 U CN201921946815 U CN 201921946815U CN 212447846 U CN212447846 U CN 212447846U
- Authority
- CN
- China
- Prior art keywords
- side plates
- walking
- reversing
- ball screw
- vehicle body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Abstract
本实用新型提供了一种四向行走搬运车,包括车体、行走导向装置、换向装置、顶升装置、驱动行走装置、供电系统;其中行走导向装置、换向装置、顶升装置、驱动行走装置、供电系统均设置在车体上,所述车体包括车体Ⅰ和车体Ⅱ,车体Ⅰ和车体Ⅱ两侧均分别设有行走轮,所述的供电系统通过线缆分别与换向装置、顶升装置、驱动行走装置连接提供电力。本实用新型提出一种四向行走搬运车,即要求四向行走搬运车在多巷道里自动换道行驶至存、取巷道口并将货物运送至卸、存巷道口卸货或者存货。本实用新型的有效效果为变道行走存取货灵活、增加了仓储空间利用率,提高了存取货物的运行效率、节省投资成本。
Description
技术领域
本实用新型涉及一种四向行走搬运车,属于物流仓储领域。
背景技术
近年来,随着现代仓储业的快速发展,对立体高架仓库的利用率提出了越来越高的要求,使得仓储库平面布局更多的货架,高度方向布置更多的货架隔层,尽量减少进、卸货通道,提高仓储面积使用率,加快了货物的存取效率,从而降低了物流成本。
目前,穿梭车主要有直行式穿梭车和子母式穿梭车两种模式,对于直行式穿梭车而言,由于布置在同一轨道上运行,这就限制了输送货物的方向,它只能在一段直线轨道上进行往复运动,导致输送能力低。而对于子母式穿梭车模式,即母车承载着子车沿进、卸巷道作前进或者后退行走,把子车运送至所需存取货的货架巷道口,子车从母车上与母车行走垂直方向驶出,进入货架巷道存取货后,在原路返回到母车上,由母车送至卸货处,这种组合模式,由于是两台车构成,因此它们自身占据了较大的空间,减少了存货货架的列数及高度方向存货隔层,降低了仓库空间的利用率。
发明内容
针对现有仓储业高密度存储系统中直行式穿梭车和子母式穿梭车存在的问题,为了满足当前仓储物流系统对货物搬运车的要求,为了提高仓库空间利用率,本实用新型的目的是提供一种四向行走搬运车,双侧行走轮驱动从而实现前后左右行驶,在立体高层货架仓库中依靠自身灵活换道实现搬运托盘货物。
本实用新型采用的技术方案如下:一种四向行走搬运车,包括车体1、行走导向装置2、换向装置3、顶升装置4、驱动行走装置5、供电系统6;其中行走导向装置2、换向装置3、顶升装置4、驱动行走装置5、供电系统6均设置在车体1上,供电系统6通过线缆分别与换向装置3、顶升装置4、驱动行走装置5 连接,车体1的四周均设有行走导向装置2;
所述车体1包括车体Ⅰ1-1和车体Ⅱ1-2,车体车体Ⅰ1-1包括侧板Ⅰ1-11、侧板Ⅱ1-12、底板1-13,所述侧板Ⅰ1-11和侧板Ⅱ1-12平行设置且分别安装两个行走轮7;所述车体Ⅱ1-2包括侧板Ⅲ1-21、侧板Ⅳ1-22、U型件1-23,两个U 型件1-23分别安转在侧板Ⅲ1-21、侧板Ⅳ1-22上端,侧板Ⅲ1-21和侧板Ⅳ1-22 平行设置且分别安装两个行走轮7,侧板Ⅰ1-11和侧板Ⅱ1-12上的行走轮7通过转动轴5-4连接,侧板Ⅲ1-21和侧板Ⅳ1-22上的行走轮7通过转动轴5-4连接;侧板Ⅰ1-11、侧板Ⅱ1-12、侧板Ⅲ1-21、侧板Ⅳ1-22构成车体1的四个侧板;侧板Ⅲ1-21、侧板Ⅳ1-22上分别安转有顶升装置4,底板1-13上安转有换向装置3,换向装置3同时与U型件1-23连接,驱动行走装置5安装在底板1-13上,驱动行走装置5能同时驱动侧板Ⅰ1-11和侧板Ⅱ1-12上的行走轮7之间的转动轴5-4 及侧板Ⅲ1-21和侧板Ⅳ1-22上的行走轮7之间的转动轴5-4。
具体地,所述的行走导向装置2包括导向轮组Ⅰ2-1、导向轮组Ⅱ2-2、导向轮组Ⅲ2-3和导向轮组Ⅳ2-4,其中导向轮组Ⅰ2-1设置在侧板Ⅰ1-11外侧下部,导向轮组Ⅱ2-2设置在侧板Ⅱ1-12外侧下部,导向轮组Ⅲ2-3设置在侧板Ⅲ1-21 外侧下部,导向轮组Ⅳ2-4设置在侧板Ⅳ1-22外侧下部。
具体地,所述的述换向装置3包括一台换向电机3-1与四台换向滚珠丝杆升降机,四台换向滚珠丝杆升降机分别为S1 3-2、S2 3-3、S3 3-4、S4 3-5,换向电机3-1、换向滚珠丝杆升降机S1 3-2、换向滚珠丝杆升降机S2 3-3位于底板1-13 的一侧,换向滚珠丝杆升降机S3 3-4、换向滚珠丝杆升降机S4 3-5位于底板1-13 的另一侧且二者之间通过连接轴3-7、第二个联轴器3-6连接,换向电机3-1为双输出轴电机,换向电机3-1一端的输出轴与换向滚珠丝杆升降机S2 3-3连接,另一端的输出轴通过第一个联轴器3-6与换向滚珠丝杆升降机S2 3-3连接,第一个联轴器3-6与换向滚珠丝杆升降机S2 3-3的连接杆上设有第一个链轮3-8,第二个联轴器3-6与换向滚珠丝杆升降机S3 3-4之间的连接杆上设有第二个链轮3-8,第一个链轮3-8与第二个链轮3-8之间通过第一链条39连接,四台滚珠丝杆升降机S13-2、S2 3-3、S3 3-4、S4 3-5的升降丝杆端部通过法兰固定在车体Ⅱ 1-2的U型件1-23上。
具体地,所述的顶升装置4包括两组顶升机构4-1,两组顶升机构4-1分别安装在侧板Ⅲ1-21、侧板Ⅳ1-22上,每组顶升机构4-1包括一台顶升电机4-2和两台滚珠丝杆升降机4-3,顶升电机4-2为双输出轴电机,一台顶升电机4-2一端通过输出轴与一台滚珠丝杆升降机4-3连接,另一端通过一个联轴器3-6与另一台滚珠丝杆升降机4-3连接进行传动连接。
具体地,所述的驱动行走装置5包括伺服电机5-1、伺服驱动器5-2、主动伞齿轮5-31、从动伞齿轮5-32、转换器5-5、链轮座5-6;伺服电机5-1、伺服驱动器5-2、链轮座5-6固定在车体Ⅰ1-1的底板1-13上,两个转换器5-5安装在侧板Ⅲ1-21和侧板Ⅳ1-22上,将车体Ⅱ1-2中的转动轴5-4与行走轮7形成过渡性传动连接;主动伞齿轮5-31、主动链轮3-81均与伺服电机5-1的输出轴连接,主动伞齿轮5-31和安装在车体Ⅰ1-1的转动轴5-4上的从动伞齿轮5-32构成一对传动组进行动力传输,驱动车体Ⅰ1-1方向上的行走轮7行走;主动链轮3-81 与双排链轮3-82中的一排通过第二链条3-10传动连接,双排链轮3-82中另一排与安装在车体Ⅱ1-2的转动轴5-4上的从动链轮3-83通过第三链条3-11连接,驱动车体Ⅱ1-2方向的行走轮7行走。
具体地,所述的供电系统6包括直流电源6-1和DC-DC模块,直流电源6-1 通过DC-DC模块与伺服电机5-1、换向电机3-1、顶升电机4-2电气连接并进行电力供应。
本实用新型的有益效果是:本实用新型的四向行走搬运车能在多巷道里自动换道行驶至存、取巷道口并将货物运送至卸、存巷道口卸货或者存货,变道行走存取货灵活、增加了仓储空间利用率,提高了存取货物的运行效率、节省投资成本。
附图说明
参考随附的附图,本实用新型更多的目的、功能和优点将通过本实用新型实施方式的如下描述得以阐明,其中:
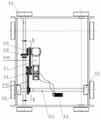
图1为本实用新型一种四向行走搬运车主结构去除一件U型件1-23后的立面示意图;
图2为本实用新型一种四向行走搬运车车体和行走导向装置结构平面示意图;
图3为本实用新型一种四向行走搬运车换向装置结构平面示意图;
图4为本实用新型一种四向行走搬运车顶升装置结构平面示意图;
图5为本实用新型一种四向行走搬运车行走驱动装置结构平面示意图;
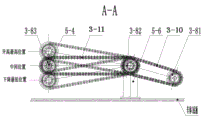
图6为图5中的A-A剖面示意图。
图7为图为本实用新型一种四向行走搬运车导向装置中的导向轮组与轨道导向系统配合导向的平面示意图。
具体实施方式
通过参考示范实施例,本实用新型的目的和功能以及用于实现这些目的和功能的方法将得以阐明,然而,本实用新型并不受限于以下所公开的示范性实施例;可以通过不同形式来对其加以实现。说明书的实质仅仅是帮助相关领域技术人员综合理解本实用新型的具体细节。
下面将参考附图描述本实用新型的实施例。在附图中,相同的附图标记代表相同或者类似的部件。
实施例1:如图1-6所示,一种四向行走搬运车,包括车体1、行走导向装置2、换向装置3、顶升装置4、驱动行走装置5、供电系统6;其中行走导向装置2、换向装置3、顶升装置4、驱动行走装置5、供电系统6均设置在车体1 上,供电系统6通过线缆分别与换向装置3、顶升装置4、驱动行走装置5连接,车体1的四周均设有行走导向装置2;
所述车体1包括车体Ⅰ1-1和车体Ⅱ1-2,车体车体Ⅰ1-1包括侧板Ⅰ1-11、侧板Ⅱ1-12、底板1-13,所述侧板Ⅰ1-11和侧板Ⅱ1-12平行设置且分别安装两个行走轮7,当行走轮7在轨道导向系统(图中未示出,下同)行驶时,四向行走搬运车进入货位轨道,进行取货和存货;所述车体Ⅱ1-2包括侧板Ⅲ1-21、侧板Ⅳ1-22、U型件1-23,侧板Ⅲ1-21、侧板Ⅳ1-22上部的两端分别通过两个U型件 1-23连接在一起,即侧板Ⅲ1-21、侧板Ⅳ1-22之间通过两个U型件1-23连接成一个牢固的框架,侧板Ⅲ1-21和侧板Ⅳ1-22平行设置且分别安装两个行走轮7,当行走轮7在轨道导向系统中行驶时,本实用新型产品进入水平轨道导向系统到达货架任意货位;侧板Ⅰ1-11和侧板Ⅱ1-12上的行走轮7通过转动轴5-4连接,侧板Ⅲ1-21和侧板Ⅳ1-22上的行走轮7通过转动轴5-4连接;侧板Ⅰ1-11、侧板Ⅱ1-12、侧板Ⅲ1-21、侧板Ⅳ1-22构成车体1的四个侧板;侧板Ⅲ1-21、侧板Ⅳ 1-22上分别安转有顶升装置4,底板1-13上安转有换向装置3,换向装置3同时与U型件1-23连接,驱动行走装置5安装在底板1-13上,驱动行走装置5能同时驱动侧板Ⅰ1-11和侧板Ⅱ1-12上的行走轮7之间的转动轴5-4及侧板Ⅲ1-21和侧板Ⅳ1-22上的行走轮7之间的转动轴5-4。
进一步地,所述的行走导向装置2包括导向轮组Ⅰ2-1、导向轮组Ⅱ2-2、导向轮组Ⅲ2-3和导向轮组Ⅳ2-4,其中导向轮组Ⅰ2-1设置在侧板Ⅰ1-11外侧下部,导向轮组Ⅱ2-2设置在侧板Ⅱ1-12外侧下部,导向轮组Ⅲ2-3设置在侧板Ⅲ1-21 外侧下部,导向轮组Ⅳ2-4设置在侧板Ⅳ1-22外侧下部。当本实用新型产品X向行走时,由行走导向装置2中的导向轮组Ⅰ2-1和导向轮组Ⅱ2-2与轨道导向系统配合导向行走;当本实用新型产品在Y向行走时,由行走导向装置2中的导向轮组Ⅲ2-3和导向轮组Ⅳ2-4与轨道导向系统配合导向行走,无论在X向或者 Y向行走,均通过行走导向装置2中的导向轮组和轨道导向系统导向行走,以达到时时修正方向的效果,确保行走路线的准确性和稳定性。
进一步地,所述的述换向装置3包括一台换向电机3-1与四台换向滚珠丝杆升降机,四台换向滚珠丝杆升降机分别为S1 3-2、S2 3-3、S3 3-4、S4 3-5,换向电机3-1、换向滚珠丝杆升降机S1 3-2、换向滚珠丝杆升降机S2 3-3位于底板1-13 的一侧,换向滚珠丝杆升降机S3 3-4、换向滚珠丝杆升降机S4 3-5位于底板1-13 的另一侧且二者之间通过连接轴3-7、第二个联轴器3-6连接,换向电机3-1为双输出轴电机,换向电机3-1一端的输出轴与换向滚珠丝杆升降机S2 3-3连接,另一端的输出轴通过第一个联轴器3-6与换向滚珠丝杆升降机S2 3-3连接,第一个联轴器3-6与换向滚珠丝杆升降机S2 3-3的连接杆上设有第一个链轮3-8,第二个联轴器3-6与换向滚珠丝杆升降机S3 3-4之间的连接杆上设有第二个链轮3-8,第一个链轮3-8与第二个链轮3-8之间通过第一链条39连接,四台滚珠丝杆升降机S13-2、S2 3-3、S3 3-4、S4 3-5的升降丝杆端部通过法兰固定在车体Ⅱ 1-2的U型件1-23上。
当换向电机3-1右旋转动力传输下,换向滚珠丝杆升降机S1 3-2和换向滚珠丝杆升降机S2 3-3丝杆一致向上升起,同时换向滚珠丝杆升降机S3 3-4和换向滚珠丝杆升降机S4 3-5在通过第二个链轮3-8、第一个链轮3-8、第一链条3-9 动力传动下也同步向上升起,从而使车体Ⅱ1-2向上升起,车体Ⅱ1-2上升到设定高度时停止,此时车体Ⅱ1-2的行走轮7与轨道支撑面分离,车体Ⅰ1-1行走轮7与轨道支撑面接触,实现本实用新型产品在车体Ⅰ1-1方向行走;当换向电机3-1左旋转动力传输下,换向滚珠丝杆升降机S1 3-2和换向滚珠丝杆升降机 S2 3-3丝杆一致下降,同时换向滚珠丝杆升降机S3 3-4和换向滚珠丝杆升降机S43-5在通过第二个链轮3-8、第一个链轮3-8、第一链条3-9动力传动下也同步下降,从而使车体Ⅰ1-1下降,车体Ⅰ1-1下降到设定距离时停止,此时车体Ⅱ 1-2的行走轮7与轨道支撑面接触,车体Ⅰ1-1行走轮7与轨道支撑面分开,实现本实用新型产品在车体Ⅱ1-2方向行走,从而使四向行走搬运车实现灵活换向行走。
进一步地,所述的顶升装置4包括两组顶升机构4-1,两组顶升机构4-1分别安装在侧板Ⅲ1-21、侧板Ⅳ1-22上,每组顶升机构4-1包括一台顶升电机4-2 和两台滚珠丝杆升降机4-3,顶升电机4-2为双输出轴电机,一台顶升电机4-2 一端通过输出轴与一台滚珠丝杆升降机4-3连接,另一端通过一个联轴器3-6与另一台滚珠丝杆升降机4-3连接进行传动连接。两台滚珠丝杆升降机4-3端部分别通过法兰固定安装在一个载物平台图中未示出,下同上,所述两个载物平台构成一个平面共同承放托盘货物。
当本实用新型产品在仓库轨道导向系统中进行存货、取货时,一台顶升电机 4-2控制两台滚珠丝杆升降机4-3同步升降,两组顶升机构4-1通过两台顶升电机4-2控制四台滚珠丝杆升降机4-3实现两个载物平台同步升降或者保持在同一个水平上。
进一步地,所述的驱动行走装置5包括伺服电机5-1、伺服驱动器5-2、主动伞齿轮5-31、从动伞齿轮5-32、转换器5-5、链轮座5-6;伺服电机5-1、伺服驱动器5-2、链轮座5-6固定在车体Ⅰ1-1的底板1-13上,两个转换器5-5安装在侧板Ⅲ1-21和侧板Ⅳ1-22上,将车体Ⅱ1-2中的转动轴5-4与行走轮7形成过渡性传动连接;主动伞齿轮5-31、主动链轮3-81均与伺服电机5-1的输出轴连接,主动伞齿轮5-31和安装在车体Ⅰ1-1的转动轴5-4上的从动伞齿轮5-32 构成一对传动组进行动力传输,驱动车体Ⅰ1-1方向上的行走轮7行走;主动链轮3-81与双排链轮3-82中的一排通过第二链条3-10传动连接,双排链轮3-82 中另一排与安装在车体Ⅱ1-2的转动轴5-4上的从动链轮3-83通过第三链条3-11 连接,驱动车体Ⅱ1-2方向的行走轮7行走。
进一步地,所述的供电系统6包括直流电源6-1和DC-DC模块,直流电源 6-1通过DC-DC模块与伺服电机5-1、换向电机3-1、顶升电机4-2电气连接并进行电力供应。直流电源6-1是通过智能变压器进行充电及控制,DC-DC模块可以将直流电源输出电压控制在低压安全工作环境下。
本实用新型的工作原理是:伺服电机5-1和伺服驱动器5-2电气连接,所述伺服电机5-1为直流伺服电机。当本实用新型产品在仓库轨道导向系统中行走,通过顶升装置4中两组顶升机构4-1的两个载物平台构成一个平面共同存货、取货时,由伺服电机5-1传动输出动力,输出的动力由伞齿轮组通过车体Ⅰ1-1的转动轴5-4驱动沿车体Ⅰ1-1方向的行走轮7行走;同步地,伺服电机5-1输出的动力由主动链轮3-81通过传输链条3-9、双排链轮3-82、车体Ⅱ1-2的转动轴 5-4、转换器5-5共同作用进行动力传输,驱动沿车体Ⅱ1-2方向的行走轮7行走,由此可见一个伺服电机5-1同时驱动两个方向的行走轮7转动,当换向电机3-1 右旋转动力传输下,换向滚珠丝杆升降机S1 3-2、S2 3-3、S3 3-4、S4 3-5同步向上升到设定高度时停止,此时车体Ⅱ1-2的行走轮7与轨道支撑面分离,车体Ⅰ 1-1行走轮7与轨道支撑面接触,实现本实用新型产品在车体Ⅰ1-1方向行走,车体Ⅱ1-2方向行走轮空转;当换向电机3-1左旋转动力传输下,换向滚珠丝杆升降机S1 3-2、S2 3-3、S3 3-4、S4 3-5同步向下降到设定距离时停止,此时车体Ⅱ1-2的行走轮7与轨道支撑面接触,车体Ⅰ1-1行走轮7与轨道支撑面分开,实现本实用新型产品在车体Ⅰ1-1方向行走轮空转,车体Ⅱ1-2方向行走,实现本实用新型产品在车体Ⅱ1-2方向行走,在行走过程中,其中必须有一个方向的行走轮与轨道支撑面分离并形成空转,空转的行走轮产生的能耗很小,基本可以忽略,双排链轮3-82中心到底板1-13的距离与车体Ⅱ1-2中的转动轴5-4中心在中间位置(见图6)处到底板1-13的距离相等,传动链条3-9以双排链轮3-82 中心位置上下摆动传动连接,以实现驱动沿车体Ⅱ1-2方向上行走轮7旋动,该传动链条3-9摆动中,从下降最低位置或者升高最高位置到到中间位置伸缩量在 1.5mm之内,而传动链条3-9在下降最低位置处和在升高最高位置处链条的长度相同,因此不影响本实用新型产品的正常运行。需要说明的是:一个伺服电机 5-1同时驱动两侧行走轮行走方案因减少一组伺服电机5-1、伺服驱动器5-2以及相应的配置,从而不仅节省车体内部使用空间,还节约制造成本。
以上实施方式只是阐述了本实用新型的说明和实践,本实用新型不受上述实施方式限制,在不脱离本实用新型精神和范围的前提下,本实用新型还有各种变化和改变,这些变化和改变都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
Claims (6)
1.一种四向行走搬运车,其特征在于:包括车体(1)、行走导向装置(2)、换向装置(3)、顶升装置(4)、驱动行走装置(5)、供电系统(6);其中行走导向装置(2)、换向装置(3)、顶升装置(4)、驱动行走装置(5)、供电系统(6)均设置在车体(1)上,供电系统(6)通过线缆分别与换向装置(3)、顶升装置(4)、驱动行走装置(5)连接,车体(1)的四周均设有行走导向装置(2);
所述车体(1)包括车体Ⅰ(1-1)和车体Ⅱ(1-2),车体Ⅰ(1-1)包括侧板Ⅰ(1-11)、侧板Ⅱ(1-12)、底板(1-13),侧板Ⅰ(1-11)和侧板Ⅱ(1-12)平行设置且分别安装两个行走轮(7);所述车体Ⅱ(1-2)包括侧板Ⅲ(1-21)、侧板Ⅳ(1-22)、U型件(1-23),侧板Ⅲ(1-21)和侧板Ⅳ(1-22)平行设置且分别安装两个行走轮(7),侧板Ⅲ(1-21)、侧板Ⅳ(1-22)的两端分别通过两个U型件(1-23)连接在一起,侧板Ⅰ(1-11)和侧板Ⅱ(1-12)上的行走轮(7)通过转动轴(5-4)连接,侧板Ⅲ(1-21)和侧板Ⅳ(1-22)上的行走轮(7)通过转动轴(5-4)连接;侧板Ⅰ(1-11)、侧板Ⅱ(1-12)、侧板Ⅲ(1-21)、侧板Ⅳ(1-22)构成车体(1)的四个侧板;侧板Ⅲ(1-21)、侧板Ⅳ(1-22)上分别安转有顶升装置(4),底板(1-13)上安转有换向装置(3),换向装置(3)同时与U型件(1-23)连接,驱动行走装置(5)安装在底板(1-13)上,驱动行走装置(5)能同时驱动侧板Ⅰ(1-11)和侧板Ⅱ(1-12)上的行走轮(7)之间的转动轴(5-4)及侧板Ⅲ(1-21)和侧板Ⅳ(1-22)上的行走轮(7)之间的转动轴(5-4)。
2.根据权利要求1所述的一种四向行走搬运车,其特征在于:所述的行走导向装置(2)包括导向轮组Ⅰ(2-1)、导向轮组Ⅱ(2-2)、导向轮组Ⅲ(2-3)和导向轮组Ⅳ(2-4),其中导向轮组Ⅰ(2-1)设置在侧板Ⅰ(1-11)外侧下部,导向轮组Ⅱ(2-2)设置在侧板Ⅱ(1-12)外侧下部,导向轮组Ⅲ(2-3)设置在侧板Ⅲ(1-21)外侧下部,导向轮组Ⅳ(2-4)设置在侧板Ⅳ(1-22)外侧下部。
3.根据权利要求1所述的一种四向行走搬运车,其特征在于:所述换向装置(3)包括一台换向电机(3-1)与四台换向滚珠丝杆升降机,四台换向滚珠丝杆升降机分别为S1(3-2)、S2(3-3)、S3(3-4)、S4(3-5),换向电机(3-1)、换向滚珠丝杆升降机S1(3-2)、换向滚珠丝杆升降机S2(3-3)位于底板(1-13)的一侧,换向滚珠丝杆升降机S3(3-4)、换向滚珠丝杆升降机S4(3-5)位于底板(1-13)的另一侧且二者之间通过连接轴(3-7)、第二个联轴器(3-6)连接,换向电机(3-1)为双输出轴电机,换向电机(3-1)一端的输出轴与换向滚珠丝杆升降机S2(3-3)连接,另一端的输出轴通过第一个联轴器(3-6)与换向滚珠丝杆升降机S2(3-3)连接,第一个联轴器(3-6)与换向滚珠丝杆升降机S2(3-3)的连接杆上设有第一个链轮(3-8),第二个联轴器(3-6)与换向滚珠丝杆升降机S3(3-4)之间的连接杆上设有第二个链轮(3-8),第一个链轮(3-8)与第二个链轮(3-8)之间通过第一链条(3-9)连接,四台滚珠丝杆升降机S1(3-2)、S2(3-3)、S3(3-4)、S4(3-5)的升降丝杆端部通过法兰固定在车体Ⅱ(1-2)的U型件(1-23)上。
4.根据权利要求1所述的一种四向行走搬运车,其特征在于:所述的顶升装置(4)包括两组顶升机构(4-1),两组顶升机构(4-1)分别安装在侧板Ⅲ(1-21)、侧板Ⅳ(1-22)上,每组顶升机构(4-1)包括一台顶升电机(4-2)和两台滚珠丝杆升降机(4-3),顶升电机(4-2)为双输出轴电机,一台顶升电机(4-2)一端通过输出轴与一台滚珠丝杆升降机(4-3)连接,另一端通过一个联轴器(3-6)与另一台滚珠丝杆升降机(4-3)连接进行传动连接。
5.根据权利要求1所述的一种四向行走搬运车,其特征在于:所述的驱动行走装置(5)包括伺服电机(5-1)、伺服驱动器(5-2)、主动伞齿轮(5-31)、从动伞齿轮(5-32)、转换器(5-5)、链轮座(5-6);伺服电机(5-1)、伺服驱动器(5-2)、链轮座(5-6)固定在车体Ⅰ(1-1)的底板(1-13)上,两个转换器(5-5)安装在侧板Ⅲ(1-21)和侧板Ⅳ(1-22)上,将车体Ⅱ(1-2)中的转动轴(5-4)与行走轮(7)形成过渡性传动连接;主动伞齿轮(5-31)、主动链轮(3-81)均与伺服电机(5-1)的输出轴连接,主动伞齿轮(5-31)和安装在车体Ⅰ(1-1)的转动轴(5-4)上的从动伞齿轮(5-32)构成一对传动组进行动力传输,驱动车体Ⅰ(1-1)方向上的行走轮(7)行走;主动链轮(3-81)与双排链轮(3-82)中的一排通过第二链条(3-10)传动连接,双排链轮(3-82)中另一排与安装在车体Ⅱ(1-2)的转动轴(5-4)上的从动链轮(3-83)通过第三链条(3-11)连接,驱动车体Ⅱ(1-2)方向的行走轮(7)行走。
6.根据权利要求1所述的一种四向行走搬运车,其特征在于:所述的供电系统(6)包括直流电源(6-1)和DC-DC模块,直流电源(6-1)通过DC-DC模块与伺服电机(5-1)、换向电机(3-1)、顶升电机(4-2)电气连接并进行电力供应。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921946815.3U CN212447846U (zh) | 2019-11-12 | 2019-11-12 | 一种四向行走搬运车 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921946815.3U CN212447846U (zh) | 2019-11-12 | 2019-11-12 | 一种四向行走搬运车 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN212447846U true CN212447846U (zh) | 2021-02-02 |
Family
ID=74479586
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921946815.3U Active CN212447846U (zh) | 2019-11-12 | 2019-11-12 | 一种四向行走搬运车 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN212447846U (zh) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113135375A (zh) * | 2021-04-20 | 2021-07-20 | 昆明欧迈科技有限公司 | 一种新型四向穿梭车 |
| CN114940333A (zh) * | 2022-07-08 | 2022-08-26 | 江苏正贸仓储设备制造有限公司 | 一种基于仓储运输的四向穿梭车 |
| CN115027857A (zh) * | 2022-05-27 | 2022-09-09 | 安徽哥伦布智能科技有限公司 | 子母搬运机器人 |
| WO2023020157A1 (zh) * | 2021-08-18 | 2023-02-23 | 旷视格图(苏州)智能装备有限公司 | 一种搬运车及搬运车系统 |
| WO2023160540A1 (zh) * | 2022-02-25 | 2023-08-31 | 北京旷视机器人技术有限公司 | 搬运设备和搬运系统 |
-
2019
- 2019-11-12 CN CN201921946815.3U patent/CN212447846U/zh active Active
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113135375A (zh) * | 2021-04-20 | 2021-07-20 | 昆明欧迈科技有限公司 | 一种新型四向穿梭车 |
| WO2023020157A1 (zh) * | 2021-08-18 | 2023-02-23 | 旷视格图(苏州)智能装备有限公司 | 一种搬运车及搬运车系统 |
| WO2023160540A1 (zh) * | 2022-02-25 | 2023-08-31 | 北京旷视机器人技术有限公司 | 搬运设备和搬运系统 |
| CN115027857A (zh) * | 2022-05-27 | 2022-09-09 | 安徽哥伦布智能科技有限公司 | 子母搬运机器人 |
| CN115027857B (zh) * | 2022-05-27 | 2023-10-31 | 安徽哥伦布智能科技有限公司 | 子母搬运机器人 |
| CN114940333A (zh) * | 2022-07-08 | 2022-08-26 | 江苏正贸仓储设备制造有限公司 | 一种基于仓储运输的四向穿梭车 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN212447846U (zh) | 一种四向行走搬运车 | |
| CN201999438U (zh) | 双轨穿梭堆垛机 | |
| CN113443317A (zh) | 单电机驱动四向穿梭板上的三工位摆臂机构及其工作方法 | |
| CN210419122U (zh) | 一种用于agv小车的两级升降装置 | |
| CN113619981A (zh) | 单电机驱动的四向穿梭板及其换向驱动方法 | |
| CN213707636U (zh) | 用于仓储物流四向穿梭式搬运机器人 | |
| CN113184433A (zh) | 一种密集型重载智能仓储系统 | |
| CN114180251A (zh) | 一种四向穿梭车 | |
| CN112173527A (zh) | 一种重载四向穿梭车 | |
| CN106639426B (zh) | 一种机械式停车库载车板的拆码垛设备及工艺 | |
| CN112374420A (zh) | 一种用于仓储物流四向穿梭式搬运机器人 | |
| CN208347396U (zh) | 一种新型全智能垂直升降停车设备 | |
| CN111409993A (zh) | 一种用于搬运机器人的换向顶升机构 | |
| CN215665299U (zh) | 单电机驱动的四向穿梭板 | |
| CN215665297U (zh) | 单电机驱动四向穿梭板上的三工位摆臂机构 | |
| CN216889971U (zh) | 一种重载轻薄四向穿梭车 | |
| CN211282377U (zh) | 一种多层穿梭车 | |
| CN115092616A (zh) | 矿车运输装置 | |
| CN113292015A (zh) | 一种重载轻薄四向穿梭车 | |
| CN112173528A (zh) | 一种紧凑型四向穿梭车用的换向机构 | |
| CN214358212U (zh) | 一种重载四向穿梭车 | |
| CN110644833A (zh) | 一种巷道式立体车库及其使用方法 | |
| CN211869228U (zh) | 纵梁式移送车辆结构 | |
| CN219585049U (zh) | 一种行走同步的四向搬运机器人 | |
| CN220467254U (zh) | 一种复合横移式重力储能升降梯 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |