CN211226203U - 一种物流管理用自动化码垛装置 - Google Patents
一种物流管理用自动化码垛装置 Download PDFInfo
- Publication number
- CN211226203U CN211226203U CN201922342324.4U CN201922342324U CN211226203U CN 211226203 U CN211226203 U CN 211226203U CN 201922342324 U CN201922342324 U CN 201922342324U CN 211226203 U CN211226203 U CN 211226203U
- Authority
- CN
- China
- Prior art keywords
- cover
- push rod
- extends
- logistics management
- wall
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Handcart (AREA)
Abstract
本实用新型属于码垛装置领域,尤其是一种物流管理用自动化码垛装置,针对现有的目前的码垛机在使用时,往往不能随着位置的变化而方便移动,同时现有的码垛机内部构造较为复杂,所以在制作时,其制造成本也是比较高昂的问题,现提出如下方案,其包括推车,所述推车的顶部分别固定安装有安装罩和限位罩,且限位罩位于安装罩的一侧,安装罩内传动连接有升降罩,本实用新型通过先后启动驱动电机和液压推杆,即可将货物进行抬升和移动,即可完成堆码,并且本装置采用推车作为移动载体,在进行移动时,可提供一定的方便,同时本技术方案中驱动电机和液压推杆均为常用的电气执行元件,所以可有效的控制制作成本,以此可大大节约制作成本。
Description
技术领域
本实用新型涉及码垛装置技术领域,尤其涉及一种物流管理用自动化码垛装置。
背景技术
随着现代工业的发展,人类正逐步的用机械工具代替人工,码垛流水线被广泛应用于面粉、饲料、水泥等袋装物料的运输和码垛,其主要操作是利用码垛机器人抓取装有物料的包装袋进行定点放置,但目前的码垛机在使用时,往往不能随着位置的变化而方便移动,同时现有的码垛机内部构造较为复杂,所以在制作时,其制造成本也是比较高昂的,所以我们提出一种物流管理用自动化码垛装置,用于解决上述所提出的问题。
实用新型内容
本实用新型的目的是为了解决现有技术中存在目前的码垛机在使用时,往往不能随着位置的变化而方便移动,同时现有的码垛机内部构造较为复杂,所以在制作时,其制造成本也是比较高昂的缺点,而提出的一种物流管理用自动化码垛装置。
为了实现上述目的,本实用新型采用了如下技术方案:
一种物流管理用自动化码垛装置,包括推车,所述推车的顶部分别固定安装有安装罩和限位罩,且限位罩位于安装罩的一侧,所述安装罩内传动连接有升降罩,且升降罩的顶部延伸至安装罩的上方并固定安装有连接板,所述连接板的底部一侧固定安装有升降杆,所述升降杆的底端延伸至限位罩内并固定安装有移动块,且移动块的一侧延伸至限位罩的外侧并固定安装有放置板,所述放置板的顶部一侧转动连接有滚轮,且放置板的顶部一侧固定安装有动力箱,所述动力箱内设有驱动组件,且驱动组件上转动连接有推杆,所述推杆的一端延伸至动力箱的外侧并转动连接有推板,且推板与放置板滑动连接。
优选的,所述安装罩的底部内壁上固定安装有驱动电机,且驱动电机的输出轴延伸至升降罩内并固定安装有转动柱,所述转动柱上开设有环形口,且升降罩的一侧底部固定安装有挡杆,所述挡杆的一端延伸至环形口内并与环形口的内壁传动连接,利用挡杆和环形口,可方便带动升降罩进行纵向移动。
优选的,所述驱动组件包括固定安装在动力箱一侧内壁上的液压推杆,且液压推杆的输出轴上固定安装有移动罩,所述移动罩与动力箱的内壁滑动连接,所述推杆的另一端与移动罩的顶部一侧转动连接,利用液压推杆可方便带动推杆进行转动。
优选的,所述移动罩的内壁上转动连接有转轴,且转轴的一端延伸至动力箱内并固定安装有齿轮,动力箱的另一侧内壁上固定安装有齿条,所述齿轮与齿条相啮合,所述转轴的另一端与推杆传动连接,利用齿条和齿轮,可在移动移动罩时,带动转轴进行转动。
优选的,所述移动罩的底部内壁上转动连接有连接轴,且连接轴的顶端延伸至移动罩的上方并与推杆固定连接,转轴的一端和连接轴上均固定安装有伞齿轮,且两个伞齿轮相啮合,利用两个伞齿轮可实现转轴带动连接轴进行转动,进一步可带动推杆进行转动。
本实用新型中,所述一种物流管理用自动化码垛装置
将货物放置在放置板上,之后可启动驱动电机带动转动柱进行转动,这时在环形口的作用下,可带动挡杆向上进行移动,因此便可带动升降罩向上进行移动,即可带动货物向上抬升;
在将货物抬升至指定的高度时,这时便可启动液压推杆,带动移动罩进行滑动,在移动罩进行移动时,便可推杆便会围绕着连接轴进行转动,推动推板进行移动,在推板进行移动时,便可推动货物进行移动,直至将货物推离放置板,即可实现将货物进行堆码;
本实用新型通过先后启动驱动电机和液压推杆,即可将货物进行抬升和移动,即可完成堆码,并且本装置采用推车作为移动载体,所以在进行移动时,可提供一定的方便,同时本技术方案中驱动电机和液压推杆均为常用的电气执行元件,所以可有效的控制制作成本,以此可大大节约制作成本。
附图说明
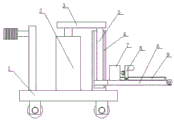
图1为本实用新型提出的一种物流管理用自动化码垛装置的结构主视图;
图2为本实用新型提出的一种物流管理用自动化码垛装置的安装罩内部结构主视图;
图3为本实用新型提出的一种物流管理用自动化码垛装置的动力箱内部连接结构俯视图;
图4为本实用新型提出的一种物流管理用自动化码垛装置的移动罩内部连接结构主视图。
图中:1推车、2安装罩、3连接板、4限位罩、5升降杆、6放置板、7动力箱、8推板、9连接罩、10升降罩、11挡杆、12驱动电机、13转动柱、14液压推杆、15齿条、16移动罩、17推杆、18齿轮、19转轴、20连接轴、21伞齿轮。
具体实施方式
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
实施例一
参照图1-4,一种物流管理用自动化码垛装置,包括推车1,推车1的顶部分别固定安装有安装罩2和限位罩4,且限位罩4位于安装罩2的一侧,安装罩2内传动连接有升降罩10,且升降罩10的顶部延伸至安装罩2的上方并固定安装有连接板3,连接板3的底部一侧固定安装有升降杆5,升降杆5的底端延伸至限位罩4内并固定安装有移动块,且移动块的一侧延伸至限位罩4的外侧并固定安装有放置板6,放置板6的顶部一侧转动连接有滚轮,且放置板6的顶部一侧固定安装有动力箱7,动力箱7内设有驱动组件,且驱动组件上转动连接有推杆17,推杆17的一端延伸至动力箱7的外侧并转动连接有推板8,且推板8与放置板6滑动连接。
其中,将货物放置在放置板6上,之后可启动驱动电机12带动转动柱13进行转动,这时在环形口的作用下,可带动挡杆11向上进行移动,因此便可带动升降罩10向上进行移动,即可带动货物向上抬升,在将货物抬升至指定的高度时,这时便可启动液压推杆14,带动移动罩16进行滑动,在移动罩16进行移动时,便可推杆17便会围绕着连接轴20进行转动,推动推板8进行移动,在推板8进行移动时,便可推动货物进行移动,直至将货物推离放置板6,即可实现将货物进行堆码,本实用新型通过先后启动驱动电机12和液压推杆14,即可将货物进行抬升和移动,即可完成堆码,并且本装置采用推车1作为移动载体,所以在进行移动时,可提供一定的方便,同时本技术方案中驱动电机12和液压推杆14均为常用的电气执行元件,所以可有效的控制制作成本,以此可大大节约制作成本。
实施例二
本实用新型中,安装罩2的底部内壁上固定安装有驱动电机12,且驱动电机12的输出轴延伸至升降罩10内并固定安装有转动柱13,转动柱13上开设有环形口,且升降罩10的一侧底部固定安装有挡杆11,挡杆11的一端延伸至环形口内并与环形口的内壁传动连接,利用挡杆11和环形口,可方便带动升降罩10进行纵向移动。
本实用新型中,驱动组件包括固定安装在动力箱7一侧内壁上的液压推杆14,且液压推杆14的输出轴上固定安装有移动罩16,移动罩16与动力箱7的内壁滑动连接,推杆17的另一端与移动罩16的顶部一侧转动连接,利用液压推杆14可方便带动推杆17进行转动。
本实用新型中,移动罩16的内壁上转动连接有转轴19,且转轴19的一端延伸至动力箱7内并固定安装有齿轮18,动力箱7的另一侧内壁上固定安装有齿条15,齿轮18与齿条15相啮合,转轴19的另一端与推杆17传动连接,利用齿条15和齿轮18,可在移动移动罩16时,带动转轴19进行转动。
本实用新型中,移动罩16的底部内壁上转动连接有连接轴20,且连接轴20的顶端延伸至移动罩16的上方并与推杆17固定连接,转轴19的一端和连接轴20上均固定安装有伞齿轮21,且两个伞齿轮21相啮合,利用两个伞齿轮21可实现转轴19带动连接轴20进行转动,进一步可带动推杆17进行转动。
本实用新型中,在需要对货物进行堆码时,首先可通过推动推车1将本装置移动至指定的位置,接着将货物放置在放置板6上,之后可启动驱动电机12带动转动柱13进行转动,这时在环形口的作用下,可带动挡杆11向上进行移动,因此便可带动升降罩10向上进行移动,即可带动货物向上抬升,在将货物抬升至指定的高度时,这时便可启动液压推杆14,带动移动罩16进行滑动,在移动罩16进行移动时,便可在齿条15的作用下,带动齿轮18进行转动,进一步便可带动转轴19进行转动,这时在两个伞齿轮21的作用下可使得连接轴20进行转动,此时推杆17便会围绕着连接轴20进行转动,推动推板8进行移动,在推板8进行移动时,便可推动货物进行移动,直至将货物推离放置板6,即可实现将货物进行堆码,因此,综上所述,本装置采用推车1作为移动载体,所以在进行移动时,可提供一定的方便,同时本技术方案中驱动电机12和液压推杆14均为常用的电气执行元件,所以可有效的控制制作成本,以此可大大节约制作成本。
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
Claims (5)
1.一种物流管理用自动化码垛装置,包括推车(1),其特征在于,所述推车(1)的顶部分别固定安装有安装罩(2)和限位罩(4),且限位罩(4)位于安装罩(2)的一侧,所述安装罩(2)内传动连接有升降罩(10),且升降罩(10)的顶部延伸至安装罩(2)的上方并固定安装有连接板(3),所述连接板(3)的底部一侧固定安装有升降杆(5),所述升降杆(5)的底端延伸至限位罩(4)内并固定安装有移动块,且移动块的一侧延伸至限位罩(4)的外侧并固定安装有放置板(6),所述放置板(6)的顶部一侧转动连接有滚轮,且放置板(6)的顶部一侧固定安装有动力箱(7),所述动力箱(7)内设有驱动组件,且驱动组件上转动连接有推杆(17),所述推杆(17)的一端延伸至动力箱(7)的外侧并转动连接有推板(8),且推板(8)与放置板(6)滑动连接。
2.根据权利要求1所述的一种物流管理用自动化码垛装置,其特征在于,所述安装罩(2)的底部内壁上固定安装有驱动电机(12),且驱动电机(12)的输出轴延伸至升降罩(10)内并固定安装有转动柱(13),所述转动柱(13)上开设有环形口,且升降罩(10)的一侧底部固定安装有挡杆(11),所述挡杆(11)的一端延伸至环形口内并与环形口的内壁传动连接。
3.根据权利要求1所述的一种物流管理用自动化码垛装置,其特征在于,所述驱动组件包括固定安装在动力箱(7)一侧内壁上的液压推杆(14),且液压推杆(14)的输出轴上固定安装有移动罩(16),所述移动罩(16)与动力箱(7)的内壁滑动连接,所述推杆(17)的另一端与移动罩(16)的顶部一侧转动连接。
4.根据权利要求3所述的一种物流管理用自动化码垛装置,其特征在于,所述移动罩(16)的内壁上转动连接有转轴(19),且转轴(19)的一端延伸至动力箱(7)内并固定安装有齿轮(18),动力箱(7)的另一侧内壁上固定安装有齿条(15),所述齿轮(18)与齿条(15)相啮合,所述转轴(19)的另一端与推杆(17)传动连接。
5.根据权利要求3所述的一种物流管理用自动化码垛装置,其特征在于,所述移动罩(16)的底部内壁上转动连接有连接轴(20),且连接轴(20)的顶端延伸至移动罩(16)的上方并与推杆(17)固定连接,转轴(19)的一端和连接轴(20)上均固定安装有伞齿轮(21),且两个伞齿轮(21)相啮合。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922342324.4U CN211226203U (zh) | 2019-12-24 | 2019-12-24 | 一种物流管理用自动化码垛装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201922342324.4U CN211226203U (zh) | 2019-12-24 | 2019-12-24 | 一种物流管理用自动化码垛装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN211226203U true CN211226203U (zh) | 2020-08-11 |
Family
ID=71922973
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201922342324.4U Active CN211226203U (zh) | 2019-12-24 | 2019-12-24 | 一种物流管理用自动化码垛装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN211226203U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022241908A1 (zh) * | 2021-05-20 | 2022-11-24 | 南京驭逡通信科技有限公司 | 一种智能制造的码垛工业机器人及其码垛方法 |
-
2019
- 2019-12-24 CN CN201922342324.4U patent/CN211226203U/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2022241908A1 (zh) * | 2021-05-20 | 2022-11-24 | 南京驭逡通信科技有限公司 | 一种智能制造的码垛工业机器人及其码垛方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203331028U (zh) | 一种用于搬运和码垛的四轴机械装置 | |
| CN202988291U (zh) | 码垛机 | |
| CN211226203U (zh) | 一种物流管理用自动化码垛装置 | |
| CN110482243B (zh) | 一种包装材料用自动化码垛设备的工作方法 | |
| CN204341481U (zh) | 一种瓷砖包装生产线用的智能码垛机 | |
| CN203266053U (zh) | 一种气瓶阀门自动装配机 | |
| CN105035607A (zh) | 一种高效率的收集垃圾的双机械手 | |
| CN113044270B (zh) | 一种自动调节打包层数的打包机 | |
| CN211256439U (zh) | 一种自动叠衣服机器人 | |
| CN111392639A (zh) | 一种多功能升降设备 | |
| CN218289592U (zh) | 一种物料码垛机械手 | |
| CN104385681B (zh) | 包装盒自动成型机及其成型方法 | |
| CN106688953A (zh) | 一种散养鸡的驱赶装置 | |
| CN212829259U (zh) | 一种转运式自动打包机构及自动打包车 | |
| CN209615552U (zh) | 一种机械机电控制旋转臂机械手 | |
| CN111573569B (zh) | 一种物流运输装置 | |
| CN201313808Y (zh) | 全自动电动升降搬运车 | |
| CN114132546A (zh) | 一种缠绕膜移动打包搬运一体化装置设备 | |
| CN201619704U (zh) | 打包机 | |
| CN220350913U (zh) | 智能生产线的拆跺码垛机器人 | |
| CN206955234U (zh) | 一种用于纱锭包装线上的木栈码垛机器人 | |
| CN113493079A (zh) | 一种新型智能仓储机器人装置 | |
| CN108672584B (zh) | 冲压废料收集装置 | |
| CN108582055A (zh) | 一种折叠式工业机器人 | |
| CN110817464A (zh) | 一种多功能管道装载机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |