CN210281560U - 超长管件自动上料装置 - Google Patents
超长管件自动上料装置 Download PDFInfo
- Publication number
- CN210281560U CN210281560U CN201921049936.8U CN201921049936U CN210281560U CN 210281560 U CN210281560 U CN 210281560U CN 201921049936 U CN201921049936 U CN 201921049936U CN 210281560 U CN210281560 U CN 210281560U
- Authority
- CN
- China
- Prior art keywords
- grabbing
- lifting
- material taking
- fixedly connected
- assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn - After Issue
Links
Images


















Abstract
超长管件自动上料装置。涉及上料设备结构领域。提出了一种结构精巧、动作稳定、可靠性好且上料效率高,可有效避免管件在上料途中弯曲变形的超长管件自动上料装置。所述上料装置包括上机架、下机架、取料组件、提升组件、推料组件和抓取组件,所述上机架固定设置在下机架的上方,所述下机架上设有若干用于容置管件的管件滑轨;所述取料组件和提升组件连接在下机架上,所述推料组件和抓取组件连接在上机架上。本实用新型具有动作稳定、运动效率高、自动化程度高、可有效避免管件在上料途中弯曲变形等优点。
Description
技术领域
本实用新型涉及上料设备结构领域。
背景技术
目前,传统割管机通常结构单一,工作时,通常由人工对待加工的管件进行转运,直至管件被夹持在割管机中。这样,一旦管件长度较大,为避免管件在转运过程中弯曲,需多名操作人员协同操作,人力成本极高、费时费力、安全隐患高且仍无法完全避免管件弯曲。
实用新型内容
本实用新型针对以上问题,提出了一种结构精巧、动作稳定、可靠性好且上料效率高,可有效避免管件在上料途中弯曲变形的超长管件自动上料装置。
本实用新型的技术方案为:所述上料装置包括上机架、下机架、取料组件、提升组件、推料组件和抓取组件,所述上机架固定设置在下机架的上方,所述下机架上设有若干用于容置管件的管件滑轨;
所述取料组件和提升组件连接在下机架上,所述推料组件和抓取组件连接在上机架上;
所述取料组件包括带轮驱动组件、若干取料带轮、若干取料定滑轮、若干取料带和若干取料杆,所述取料杆的顶端高于所述管件滑轨、且若干所述取料杆的底端均固定连接在下机架的一侧;若干所述取料带轮通过带轮驱动组件连接在下机架中、且在带轮驱动组件的带动下做绕自身轴心的旋转运动,所述取料定滑轮与取料带轮一一对应、且二者处于同一竖直平面内,若干所述取料定滑轮分别铰接在若干管件滑轨的一侧;若干所述取料带的一端分别固定连接在若干取料杆的顶端、且另一端分别固定连接在若干取料带轮上,所述取料带的中部还绕过所述取料定滑轮;
所述推料组件包括支架驱动组件、拨叉驱动组件、若干活动支架和若干推料拨叉,所述活动支架可升降的连接在上机架上、且位于管件滑轨的上方,所述支架驱动组件连接在上机架和活动支架之间,用于驱动若干活动支架同步做直线升降运动;所述活动支架的底部设有与管件滑轨平行的拨叉滑轨,所述推料拨叉可滑动的连接在拨叉滑轨上;所述拨叉驱动组件连接在推料拨叉和活动支架之间,用于驱动若干推料拨叉同步沿拨叉滑轨做直线往复运动;
所述提升组件包括提升驱动组件和提升板,所述提升板可升降的连接在下机架上、且竖直设置于管件滑轨远离取料组件的一侧,所述提升驱动组件连接在提升板和下机架之间,用于驱动若干提升板同步做直线升降运动;
所述抓取组件包括抓取驱动组件、若干抓取架、若干抓取臂和若干夹爪组件,所述抓取架、抓取臂和夹爪组件一一对应,所述抓取架平行设置于管件滑轨的上方、且与上机架固定相连,所述抓取架的一侧固定连接有沿其长度方向设置的抓取滑轨,所述抓取臂的一端可滑动地连接在抓取滑轨上,所述抓取驱动组件连接在上机架和抓取臂之间,用于驱动若干抓取臂沿抓取滑轨做同步的直线往复运动;
所述夹爪组件固定连接在抓取臂远离抓取架的一端,所述夹爪组件包括夹板支架、上夹板、下夹板、夹板油缸和联动组件;所述夹板支架固定连接在抓取臂远离抓取架的一端,所述夹板油缸固定连接在夹板支架的顶部,所述上夹板和下夹板平行设置、且二者均可升降的连接在夹板支架背向抓取臂的一侧,所述上夹板与夹板油缸的底端固定相连、且在夹板油缸的驱动下做上下往复运动,所述下夹板通过联动组件与上夹板相联动、且二者做同步反向直线运动。
所述取料带的中部套接有配重块,所述配重块与取料带滑动连接。
所述带轮驱动组件包括取料电机和一对取料轴,所述取料电机固定连接在下机架中,两根取料轴均与取料电机同轴心、且分别通过取料联轴器与取料电机的输出轴的两端相连接;所述取料轴还与下机架铰接,若干所述取料带轮分别套接在两根取料轴上、且分别与两根取料轴固定相连。
所述支架驱动组件包括支架电机、一对支架轴、若干支架齿轮和若干支架齿条,所述支架电机固定连接在上机架中,两根支架轴同轴心、且二者通过支架联轴器与支架电机的输出轴相连接,若干所述支架齿轮分别固定连接在两根支架轴上;所述支架齿条竖直设置、且与支架齿轮啮合,所述支架齿条与活动支架一一对应、且二者固定相连。
所述拨叉驱动组件包括拨叉电机和一对拨叉轴,所述拨叉电机固定连接在其中一个活动支架上,两根拨叉轴同轴心、且二者通过拨叉联轴器与拨叉电机的输出轴相连接;
所述活动支架上铰接有处于同一竖直平面内的链轮一、链轮二、链轮三和张紧链轮,所述链轮一、链轮二、链轮三外绕设有环形的传动链,所述张紧链轮压在传动链之上;
两所述拨叉轴分别穿设若干所述活动支架、且分别与若干链轮一固定相连,所述传动链的中部通过连接块与推料拨叉固定相连。
所述提升板的顶端铰接有平行于管件滑轨设置的提升托辊;所述提升板的顶端还固定连接有竖直设置的限位导柱,所述限位导柱处于提升托辊远离管件滑轨的一端。
所述提升驱动组件包括提升电机、一对提升轴若干提升齿轮和若干提升齿条,所述提升电机固定连接在下机架中,两根提升轴同轴心、且二者通过提升联轴器与提升电机的输出轴相连接,若干所述提升齿轮分别固定连接在两根提升轴上;所述提升齿条竖直设置、且与提升齿轮啮合,所述提升齿条与提升板一一对应、且二者固定相连。
所述抓取驱动组件包括抓取电机、一对抓取轴、若干抓取带轮和若干抓取皮带,所述抓取电机固定连接在上机架上,两根抓取轴同轴心、且二者通过抓取联轴器与抓取电机的输出轴相连接,若干抓取带轮分别套接在两根抓取轴上、且与抓取轴固定相连,所述抓取带轮、抓取皮带和抓取架一一对应;
所述抓取架背向抓取滑轨的一侧端面上还铰接有带轮一、带轮二和张紧带轮,所述抓取皮带呈环形、且依次绕设在抓取带轮、带轮一、带轮二上,所述张紧带轮压在抓取皮带上,所述抓取臂通过连接板与抓取皮带的中部固定相连。
所述联动组件包括上联动齿条、下联动齿条和联动齿轮,所述上联动齿条竖直设置、且与上夹板固定相连,所述下联动齿条竖直设置、且与下夹板固定相连,所述联动齿轮铰接在夹爪支架上、且联动齿轮的两侧分别与上齿条、下齿条啮合。
本实用新型通过上料组件有效代替了人工,通过若干取料带、若干推料拨叉、若干管件滑轨、若干提升板和若干夹爪实现了对大尺寸管件的上料动作,有效避免了人工操作人力成本极高、费时费力、安全隐患高以及无法完全避免管件弯曲等缺陷,具有动作稳定、运动效率高、自动化程度高、可有效避免管件在上料途中弯曲变形等优点。
附图说明
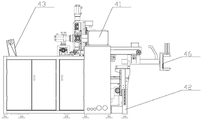
图1是本案的结构示意图,
图2是图1是左视图,
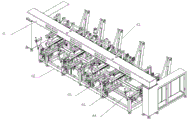
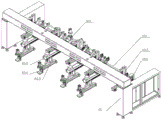
图3是图1的立体图,
图4是图3的爆炸图;
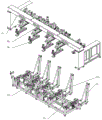
图5是本案中取料组件和提升组件的结构示意图,
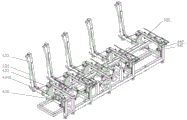
图6是图5的立体图一,
图7是图5的立体图二,
图8是图5的左视图,
图9是图8的G-G向剖视图,
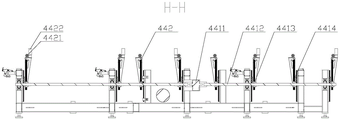
图10是图8的H-H向剖视图;
图11是本案中推料组件和抓取组件的结构示意图,
图12是图11的左视图,
图13是图11的立体图;
图14是本案中推料组件和抓取组件的内部结构示意图
图15是图14是左视图,
图16是图14的右视图,
图17是图14的L-L向剖视图,
图18是图14的M-M向剖视图,
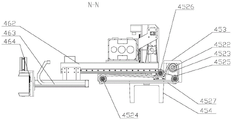
图19是图14的N-N向剖视图,
图20是图14的立体图一,
图21是图14的立体图二,
图22是图14的立体图三,
图23是图14的立体图四,
图24是图14的立体图五。
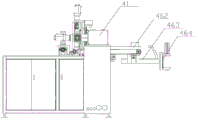
图25是本案的实施方式示意图,
图26是图25的俯视图,
图27是图25的立体图;
图中4是上料装置,41是上机架,42是下机架,420是管件滑轨;
43是取料组件,431是带轮驱动组件,4311是取料电机,4312是取料轴,432是取料带轮,433是取料定滑轮,434是取料带,4340是配重块,435是取料杆;
44是提升组件,441是提升驱动组件,4411是提升电机,4412是提升轴,4413是提升齿轮,4414是提升齿条,442是提升板,4421是提升托辊,4422是限位导柱;
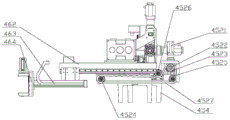
45是推料组件,451是支架驱动组件,4511是支架电机,4512是支架轴,4513是支架齿轮,4514是支架齿条,452是拨叉驱动组件,4521是拨叉电机,4522是拨叉轴,4523是链轮一,4524是链轮二,4525是链轮三,4526是张紧链轮,4527是传动链,453是活动支架,454是推料拨叉;
46是抓取组件,461是抓取驱动组件,4611是抓取电机,4612是抓取轴,4613是抓取皮带,462是抓取架,463是抓取臂,464是夹爪组件,4641是夹板支架,4642是上夹板,4643是下夹板,4644是夹板油缸,4645是上联动齿条,4646是下联动齿条,4647是联动齿轮。
具体实施方式
本实用新型如图1-27所示,所述上料装置4包括上机架41、下机架42、取料组件43、提升组件44、推料组件45和抓取组件46,所述上机架41固定设置在下机架42的上方,所述下机架42上设有若干用于容置管件的管件滑轨420;
所述取料组件43和提升组件44连接在下机架42上,所述推料组件45和抓取组件46连接在上机架41上;
所述取料组件43包括带轮驱动组件431、若干取料带轮432、若干取料定滑轮433、若干取料带434和若干取料杆435,所述取料杆435的顶端高于所述管件滑轨420、且若干所述取料杆435的底端均固定连接在下机架42的一侧;若干所述取料带轮432通过带轮驱动组件431连接在下机架42中、且在带轮驱动组件431的带动下做绕自身轴心的旋转运动,所述取料定滑轮433与取料带轮432一一对应、且二者处于同一竖直平面内,若干所述取料定滑轮433分别铰接在若干管件滑轨420的一侧;若干所述取料带434的一端分别固定连接在若干取料杆435的顶端、且另一端分别固定连接在若干取料带轮432上,所述取料带434的中部还绕过所述取料定滑轮433;使用时,可将管件放置在处于取料杆和下机架之间的取料带上,需要取用管件时,操作人员可开启取料带轮驱动组件,使得取料带轮旋转逐步收紧所有取料带,从而使得管件逐步上升,此后,由于取料杆的顶端高于所述管件滑轨,因此,最终将使得管件沿取料带运动至若干管件滑轨之上;带管件运动至管件滑轨上之后,可反转取料带轮,使得取料带复位;
所述推料组件45包括支架驱动组件451、拨叉驱动组件452、若干活动支架453和若干推料拨叉454,所述活动支架453可升降的连接在上机架41上、且位于管件滑轨420的上方,所述支架驱动组件451连接在上机架41和活动支架453之间,用于驱动若干活动支架453同步做直线升降运动;所述活动支架453的底部设有与管件滑轨420平行的拨叉滑轨,所述推料拨叉454可滑动的连接在拨叉滑轨上;所述拨叉驱动组件452连接在推料拨叉454和活动支架453之间,用于驱动若干推料拨叉同步沿拨叉滑轨做直线往复运动;使用时,可先通过支架驱动组件驱动活动支架以及推料拨叉整体下行,使得推料拨叉的底端接触到管件,在通过拨叉驱动组价驱动推料拨叉平移,从而将管件从管件滑轨的一端推动到管件滑轨的另一端;而在管件运动到位后,操作人员可送过支架驱动组件、拨叉驱动组件重新驱动拨叉复位,以待下一次推料;
所述提升组件44包括若干提升驱动组件441和若干提升板442,所述提升板442可升降的连接在下机架42上、且竖直设置于管件滑轨420远离取料组件43的一侧,所述提升驱动组件441连接在提升板442和下机架42之间,用于驱动若干提升板442同步做直线升降运动;这样,当管件在推料组件的作用下,自取料组件所在的一侧沿管件滑轨推动至提升板上方后,可开启提升驱动组件,使得若干提升板同时上行,将管件举起,运送至待抓取的位置;
所述抓取组件46包括抓取驱动组件461、若干抓取架462、若干抓取臂463和若干夹爪组件464,所述抓取架462、抓取臂463和夹爪组件464一一对应,所述抓取架462平行设置于管件滑轨420的上方、且与上机架41固定相连,所述抓取架462的一侧固定连接有沿其长度方向设置的抓取滑轨,所述抓取臂463的一端可滑动地连接在抓取滑轨上,所述抓取驱动组件461连接在上机架41和抓取臂463之间,用于驱动若干抓取臂463沿抓取滑轨做同步的直线往复运动;
所述夹爪组件464固定连接在抓取臂463远离抓取架462的一端,所述夹爪组件464包括夹板支架4641、上夹板4642、下夹板4643、夹板油缸4644和联动组件;所述夹板支架4641固定连接在抓取臂463远离抓取架462的一端,所述夹板油缸4644固定连接在夹板支架4641的顶部,所述上夹板4642和下夹板4643平行设置、且二者均可升降的连接在夹板支架4641背向抓取臂463的一侧,所述上夹板4642与夹板油缸4644的底端固定相连、且在夹板油缸4644的驱动下做上下往复运动,所述下夹板4643通过联动组件与上夹板4642相联动、且二者做同步反向直线运动。这样,可在管件提升到待抓取位置前,通过抓取驱动组件控制抓取臂平移至提升组件朝向取料组件的一侧;待管件提升到待抓取位置后,通过抓取驱动组件控制抓取臂反向平移,使得管件处于上夹板和下夹板之间,并开启夹板油缸,使得上夹板、下夹板不断靠近,最终稳定的夹住管件;此后,下放提升板,并继续开启抓取驱动组件,则可将管件送出至后续的加工设备中。
最终,本案通过上料组件有效代替了人工,通过若干取料带、若干推料拨叉、若干管件滑轨、若干提升板和若干夹爪实现了对大尺寸管件的上料动作,有效避免了人工操作人力成本极高、费时费力、安全隐患高以及无法完全避免管件弯曲等缺陷,具有动作稳定、运动效率高、自动化程度高、可有效避免管件在上料途中弯曲变形等优点。
所述取料带434的中部套接有配重块4340,所述配重块4340与取料带434滑动连接。从而在配重块的影响下使得取料带中部保持向下的运动趋势,从而在管件放入前也可保持取料带的张紧,避免取料带与取料定滑轮脱离,有效保证了取料组件的稳定性和可靠性。
所述带轮驱动组件431包括取料电机4311和一对取料轴4312,所述取料电机4311固定连接在下机架42中,两根取料轴4312均与取料电机4311同轴心、且分别通过取料联轴器与取料电机4311的输出轴的两端相连接;从而缩短取料轴的长度,在降低设备成本的同时,保证了取料组件的动作稳定性;所述取料轴还与下机架铰接,若干所述取料带轮分别套接在两根取料轴上、且分别与两根取料轴固定相连。这样,取料电机开启后可直接驱动取料轴旋转,从而带动若干取料带轮同时旋转,实现收紧或放松取料带的动作。
所述支架驱动组件451包括支架电机4511、一对支架轴4512、若干支架齿轮4513和若干支架齿条4514,所述支架电机4511固定连接在上机架41中,两根支架轴4512同轴心、且二者通过支架联轴器与支架电机4511的输出轴相连接,若干所述支架齿轮4513分别固定连接在两根支架轴4512上;所述支架齿条4514竖直设置、且与支架齿轮4513啮合,所述支架齿条4514与活动支架453一一对应、且二者固定相连。这样,支架电机开启后,将通过支架联轴器和一对支架轴带动若干支架齿轮同时旋转,从而通过支架齿条的传动,使得若干活动支架同步做直线升降运动。
所述拨叉驱动组件452包括拨叉电机4521和一对拨叉轴4522,所述拨叉电机4521固定连接在其中一个活动支架453上,两根拨叉轴4522同轴心、且二者通过拨叉联轴器与拨叉电机4521的输出轴相连接;
所述活动支架453上铰接有处于同一竖直平面内的链轮一4523、链轮二4524、链轮三4525和张紧链轮4526,所述链轮一4523、链轮二4524、链轮三4525外绕设有环形的传动链4527,所述张紧链轮4526压在传动链4527之上;
两所述拨叉轴4522分别穿设若干所述活动支架453、且分别与若干链轮一4523固定相连,所述传动链4527的中部通过连接块与推料拨叉454固定相连。这样,拨叉电机开启后,将通过拨叉联轴器和拨叉轴带动若干链轮一同时旋转,从而带动若干环形的传动链同时做圆周运动,进而通过连接块带动若干推料拨叉沿拨叉滑轨做同步的直线往复运动。
所述提升板442的顶端铰接有平行于管件滑轨设置的提升托辊4421,从而降低对管件表面的磨损;所述提升板的顶端还固定连接有竖直设置的限位导柱4422,所述限位导柱4422处于提升托辊4421远离管件滑轨420的一端,从而在推料拨叉推动管件时,对每次管件运动的极限位置进行限定。
所述提升驱动组件441包括提升电机4411、一对提升轴4412、若干提升齿轮4413和若干提升齿条4414,所述提升电机4411固定连接在下机架42中,两根提升轴4412同轴心、且二者通过提升联轴器与提升电机4411的输出轴相连接,若干所述提升齿轮4413分别固定连接在两根提升轴4412上;所述提升齿条4414竖直设置、且与提升齿轮4413啮合,所述提升齿条4414与提升板442一一对应、且二者固定相连。这样,提升电机开启后,将通过提升联轴器和一对提升轴带动若干提升齿轮同时旋转,从而通过提升齿条的传动,使得若干提升板同步做直线升降运动。
所述抓取驱动组件461包括抓取电机4611、一对抓取轴4612、若干抓取带轮和若干抓取皮带4613,所述抓取电机4611固定连接在上机架41上,两根抓取轴4612同轴心、且二者通过抓取联轴器与抓取电机4611的输出轴相连接,若干抓取带轮分别套接在两根抓取轴上、且与抓取轴4612固定相连,所述抓取带轮、抓取皮带4613和抓取架462一一对应;
所述抓取架背向抓取滑轨的一侧端面上还铰接有带轮一、带轮二和张紧带轮,所述抓取皮带呈环形、且依次绕设在抓取带轮、带轮一、带轮二上,所述张紧带轮压在抓取皮带上,所述抓取臂463通过连接板与抓取皮带4613的中部固定相连。这样,抓取电机开启后,将通过抓取联轴器和抓取轴带动若干抓取带轮同时旋转,从而带动若干环形的抓取皮带同时做圆周运动,进而通过连接板带动若干抓取臂沿抓取滑轨做同步的直线往复运动。
所述联动组件包括上联动齿条4645、下联动齿条4646和联动齿轮4647,所述上联动齿条4645竖直设置、且与上夹板4642固定相连,所述下联动齿条4646竖直设置、且与下夹板4643固定相连,所述联动齿轮4647铰接在夹爪支架4641上、且联动齿轮4647的两侧分别与上联动齿条4645、下联动齿条4646啮合。这样,将使得上夹板的直线运动通过联动组件传递至下夹板后,使得下夹板和上夹板做同步反向直线运动。
Claims (9)
1.超长管件自动上料装置,其特征在于,所述上料装置包括上机架、下机架、取料组件、提升组件、推料组件和抓取组件,所述上机架固定设置在下机架的上方,所述下机架上设有若干用于容置管件的管件滑轨;
所述取料组件和提升组件连接在下机架上,所述推料组件和抓取组件连接在上机架上;
所述取料组件包括带轮驱动组件、若干取料带轮、若干取料定滑轮、若干取料带和若干取料杆,所述取料杆的顶端高于所述管件滑轨、且若干所述取料杆的底端均固定连接在下机架的一侧;若干所述取料带轮通过带轮驱动组件连接在下机架中、且在带轮驱动组件的带动下做绕自身轴心的旋转运动,所述取料定滑轮与取料带轮一一对应、且二者处于同一竖直平面内,若干所述取料定滑轮分别铰接在若干管件滑轨的一侧;若干所述取料带的一端分别固定连接在若干取料杆的顶端、且另一端分别固定连接在若干取料带轮上,所述取料带的中部还绕过所述取料定滑轮;
所述推料组件包括支架驱动组件、拨叉驱动组件、若干活动支架和若干推料拨叉,所述活动支架可升降的连接在上机架上、且位于管件滑轨的上方,所述支架驱动组件连接在上机架和活动支架之间,用于驱动若干活动支架同步做直线升降运动;所述活动支架的底部设有与管件滑轨平行的拨叉滑轨,所述推料拨叉可滑动的连接在拨叉滑轨上;所述拨叉驱动组件连接在推料拨叉和活动支架之间,用于驱动若干推料拨叉同步沿拨叉滑轨做直线往复运动;
所述提升组件包括提升驱动组件和提升板,所述提升板可升降的连接在下机架上、且竖直设置于管件滑轨远离取料组件的一侧,所述提升驱动组件连接在提升板和下机架之间,用于驱动若干提升板同步做直线升降运动;
所述抓取组件包括抓取驱动组件、若干抓取架、若干抓取臂和若干夹爪组件,所述抓取架、抓取臂和夹爪组件一一对应,所述抓取架平行设置于管件滑轨的上方、且与上机架固定相连,所述抓取架的一侧固定连接有沿其长度方向设置的抓取滑轨,所述抓取臂的一端可滑动地连接在抓取滑轨上,所述抓取驱动组件连接在上机架和抓取臂之间,用于驱动若干抓取臂沿抓取滑轨做同步的直线往复运动;
所述夹爪组件固定连接在抓取臂远离抓取架的一端,所述夹爪组件包括夹板支架、上夹板、下夹板、夹板油缸和联动组件;所述夹板支架固定连接在抓取臂远离抓取架的一端,所述夹板油缸固定连接在夹板支架的顶部,所述上夹板和下夹板平行设置、且二者均可升降的连接在夹板支架背向抓取臂的一侧,所述上夹板与夹板油缸的底端固定相连、且在夹板油缸的驱动下做上下往复运动,所述下夹板通过联动组件与上夹板相联动、且二者做同步反向直线运动。
2.根据权利要求1所述的超长管件自动上料装置,其特征在于,所述取料带的中部套接有配重块,所述配重块与取料带滑动连接。
3.根据权利要求1所述的超长管件自动上料装置,其特征在于,所述带轮驱动组件包括取料电机和一对取料轴,所述取料电机固定连接在下机架中,两根取料轴均与取料电机同轴心、且分别通过取料联轴器与取料电机的输出轴的两端相连接;所述取料轴还与下机架铰接,若干所述取料带轮分别套接在两根取料轴上、且分别与两根取料轴固定相连。
4.根据权利要求1所述的超长管件自动上料装置,其特征在于,所述支架驱动组件包括支架电机、一对支架轴、若干支架齿轮和若干支架齿条,所述支架电机固定连接在上机架中,两根支架轴同轴心、且二者通过支架联轴器与支架电机的输出轴相连接,若干所述支架齿轮分别固定连接在两根支架轴上;所述支架齿条竖直设置、且与支架齿轮啮合,所述支架齿条与活动支架一一对应、且二者固定相连。
5.根据权利要求1所述的超长管件自动上料装置,其特征在于,所述拨叉驱动组件包括拨叉电机和一对拨叉轴,所述拨叉电机固定连接在其中一个活动支架上,两根拨叉轴同轴心、且二者通过拨叉联轴器与拨叉电机的输出轴相连接;
所述活动支架上铰接有处于同一竖直平面内的链轮一、链轮二、链轮三和张紧链轮,所述链轮一、链轮二、链轮三外绕设有环形的传动链,所述张紧链轮压在传动链之上;
两所述拨叉轴分别穿设若干所述活动支架、且分别与若干链轮一固定相连,所述传动链的中部通过连接块与推料拨叉固定相连。
6.根据权利要求1所述的超长管件自动上料装置,其特征在于,所述提升板的顶端铰接有平行于管件滑轨设置的提升托辊;所述提升板的顶端还固定连接有竖直设置的限位导柱,所述限位导柱处于提升托辊远离管件滑轨的一端。
7.根据权利要求1所述的超长管件自动上料装置,其特征在于,所述提升驱动组件包括提升电机、一对提升轴若干提升齿轮和若干提升齿条,所述提升电机固定连接在下机架中,两根提升轴同轴心、且二者通过提升联轴器与提升电机的输出轴相连接,若干所述提升齿轮分别固定连接在两根提升轴上;所述提升齿条竖直设置、且与提升齿轮啮合,所述提升齿条与提升板一一对应、且二者固定相连。
8.根据权利要求1所述的超长管件自动上料装置,其特征在于,所述抓取驱动组件包括抓取电机、一对抓取轴、若干抓取带轮和若干抓取皮带,所述抓取电机固定连接在上机架上,两根抓取轴同轴心、且二者通过抓取联轴器与抓取电机的输出轴相连接,若干抓取带轮分别套接在两根抓取轴上、且与抓取轴固定相连,所述抓取带轮、抓取皮带和抓取架一一对应;
所述抓取架背向抓取滑轨的一侧端面上还铰接有带轮一、带轮二和张紧带轮,所述抓取皮带呈环形、且依次绕设在抓取带轮、带轮一、带轮二上,所述张紧带轮压在抓取皮带上,所述抓取臂通过连接板与抓取皮带的中部固定相连。
9.根据权利要求1所述的超长管件自动上料装置,其特征在于,所述联动组件包括上联动齿条、下联动齿条和联动齿轮,所述上联动齿条竖直设置、且与上夹板固定相连,所述下联动齿条竖直设置、且与下夹板固定相连,所述联动齿轮铰接在夹爪支架上、且联动齿轮的两侧分别与上齿条、下齿条啮合。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921049936.8U CN210281560U (zh) | 2019-07-05 | 2019-07-05 | 超长管件自动上料装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201921049936.8U CN210281560U (zh) | 2019-07-05 | 2019-07-05 | 超长管件自动上料装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210281560U true CN210281560U (zh) | 2020-04-10 |
Family
ID=70100952
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201921049936.8U Withdrawn - After Issue CN210281560U (zh) | 2019-07-05 | 2019-07-05 | 超长管件自动上料装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210281560U (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110405514A (zh) * | 2019-07-05 | 2019-11-05 | 江苏扬力数控机床有限公司 | 一种超长管件自动上料装置 |
| CN113021055A (zh) * | 2021-05-28 | 2021-06-25 | 沈阳机床股份有限公司 | 多功能辅助料架及其控制方法 |
| CN114082555A (zh) * | 2021-11-19 | 2022-02-25 | 中国联合工程有限公司 | 一种钢管内外壁涂覆装置 |
| CN115555901A (zh) * | 2022-11-17 | 2023-01-03 | 朗快智能科技(杭州)有限公司 | 一种用于棒料的自动化上料系统及上料方法 |
-
2019
- 2019-07-05 CN CN201921049936.8U patent/CN210281560U/zh not_active Withdrawn - After Issue
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110405514A (zh) * | 2019-07-05 | 2019-11-05 | 江苏扬力数控机床有限公司 | 一种超长管件自动上料装置 |
| CN110405514B (zh) * | 2019-07-05 | 2023-08-15 | 江苏扬力数控机床有限公司 | 一种超长管件自动上料装置 |
| CN113021055A (zh) * | 2021-05-28 | 2021-06-25 | 沈阳机床股份有限公司 | 多功能辅助料架及其控制方法 |
| CN114082555A (zh) * | 2021-11-19 | 2022-02-25 | 中国联合工程有限公司 | 一种钢管内外壁涂覆装置 |
| CN114082555B (zh) * | 2021-11-19 | 2022-10-14 | 中国联合工程有限公司 | 一种钢管内外壁涂覆装置 |
| CN115555901A (zh) * | 2022-11-17 | 2023-01-03 | 朗快智能科技(杭州)有限公司 | 一种用于棒料的自动化上料系统及上料方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN210281560U (zh) | 超长管件自动上料装置 | |
| CN109319203B (zh) | 钢管码垛缠绕打包生产线 | |
| CN110027741A (zh) | 一种瓷砖翻转装置 | |
| CN209618304U (zh) | 一种管材上料装置 | |
| CN203150530U (zh) | 一种电池组件的搬运筛选装置 | |
| CN115303771A (zh) | 翻转输送装置 | |
| CN206782739U (zh) | 猕猴桃中转筐自动上果机 | |
| CN208699936U (zh) | 下料翻转机械手 | |
| CN110369783B (zh) | 一种全自动割管机 | |
| CN110405514B (zh) | 一种超长管件自动上料装置 | |
| CN210280847U (zh) | 全自动割管机 | |
| CN109178781A (zh) | 果丹皮刮片流水线送料装置 | |
| CN218619255U (zh) | 一种全自动装卸车设备 | |
| CN114455151B (zh) | 一种棒材打捆用夹紧机构及其使用方法 | |
| CN216140901U (zh) | 高速周转箱拆垛机 | |
| CN206156341U (zh) | 一种玻璃下片装置 | |
| CN206142387U (zh) | 一种自动化摆放装置 | |
| CN213733487U (zh) | 一种平面口罩耳带焊接机的送耳带线装置 | |
| CN210793782U (zh) | 一种醋饮生产用自动包装机 | |
| CN110979809B (zh) | 一种用于板材包装的产品提升辅助机构 | |
| CN208699937U (zh) | 一种下料翻转单元 | |
| CN109571522B (zh) | 一种食用菌生产线侧装式自动装卸堆积机械手 | |
| CN112498881A (zh) | 一种封包线原材料拆封装置 | |
| CN106241371B (zh) | 一种玻璃下片机 | |
| CN205802201U (zh) | 一种自动复合输送机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| AV01 | Patent right actively abandoned |
Granted publication date: 20200410 Effective date of abandoning: 20230815 |
|
| AV01 | Patent right actively abandoned |
Granted publication date: 20200410 Effective date of abandoning: 20230815 |
|
| AV01 | Patent right actively abandoned | ||
| AV01 | Patent right actively abandoned |