CN203214782U - 一种内置式行星减速关节 - Google Patents
一种内置式行星减速关节 Download PDFInfo
- Publication number
- CN203214782U CN203214782U CN 201320177724 CN201320177724U CN203214782U CN 203214782 U CN203214782 U CN 203214782U CN 201320177724 CN201320177724 CN 201320177724 CN 201320177724 U CN201320177724 U CN 201320177724U CN 203214782 U CN203214782 U CN 203214782U
- Authority
- CN
- China
- Prior art keywords
- joint
- bearing
- built
- sun gear
- bearing axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Landscapes
- Retarders (AREA)
Abstract
本实用新型公开了一种内置式行星减速关节,目的在于解决现有关节型机器人的旋转关节所采用的高精度减速器重量重,结构尺寸大,在一定程度上影响了关节型机器人的运转平稳性、启动精度等特性的问题,该装置包括主固定支承轴、设置在主固定支承轴内的输入轴、行星架、与行星架相连的关节转筒、第一轴承、关节支承轴承、第二轴承。本实用新型构思巧妙,结构紧凑,传动精度高,重量轻。其能够有效减小减速器的尺寸结构,降低减速器的重量,有效解决了采用现有高精度减速器的关节型机器人,存在的不平衡重力矩和运转惯性力较大,在一定程度上影响关节型机器人的运转平稳性和启动、定位精度等的问题。
Description
技术领域
本实用新型涉及机械领域,尤其是一种内置式行星减速关节,具体为一种用于关节型工业机器人和机械手的内置式行星减速关节。
背景技术
在工业化自动生产进程中,物料的移动、搬运、定位、码垛等运动重复性多,劳动强度大。目前,主要采用人工方式完成前述工作,工人工作时间长,劳动强度大,效率低,诸多不足日益体现出来。同时,工人不能在恶劣、危险环境条件中作业,具有一定的局限性。为了应对前述问题,人们开始采用自动化工业机器人代替人工操作,以克服工人劳动强度大、工序流程长、效率低等缺陷,其已成为机器人研究的重要技术领域之一。
在工业机器人技术、产品开发与应用中,关节型机器人和机械手已得到广泛应用。其中,高精度的旋转关节是关节型机器人的关键部件之一。目前,用于关节型机器人的高精度的旋转关节,通常仅具有高精度旋转功能。关节型机器人的旋转关节均小于180°,部分甚至小于90°,其所采用的伺服驱动电机或液压马达转速通常在1000r/mim~3000r/min之间,因而需要配置大减速比的高精度减速器。而高精度减速器重量重,结构尺寸大,导致关节型机器人的不平衡重力矩和运转惯性力较大,在一定程度上影响了关节型机器人的运转平稳性、启动精度、定位精度等特性。因而,目前迫切需要一种结构尺寸小,重量轻的减速器。
实用新型内容
本实用新型的发明目的在于:针对现有关节型机器人的旋转关节所采用的高精度减速器重量重,结构尺寸大,导致关节型机器人的不平衡重力矩和运转惯性力较大,在一定程度上影响了关节型机器人的运转平稳性、启动精度、定位精度等特性的问题,提供一种内置式行星减速关节。本实用新型构思巧妙,结构紧凑,传动精度高,重量轻。其能够有效减小减速器的尺寸结构,降低减速器的重量,有效解决了采用现有高精度减速器的关节型机器人,存在的不平衡重力矩和运转惯性力较大,在一定程度上影响关节型机器人的运转平稳性和启动、定位精度等的问题。
为了实现上述目的,本实用新型采用如下技术方案:
一种内置式行星减速关节,包括主固定支承轴、设置在主固定支承轴内的输入轴、行星架、与行星架相连的关节转筒、第一轴承、关节支承轴承、第二轴承,所述输入轴与主固定支承轴之间通过第一轴承相连,所述关节转筒通过关节支承轴承与主固定支承轴相连,所述行星架上设置有太阳轮支承轴,所述太阳轮支承轴上分别设置有第一太阳轮、第二太阳轮,所述输入轴上设置有中心轮,所述中心轮与第一太阳轮相啮合,所述主固定支承轴上设置有固定轮,所述固定轮与第二太阳轮相啮合。
所述行星架通过第二轴承与主固定支承轴相连。
所述固定轮为外齿固定轮或内齿固定轮。
所述关节转筒上设置有辅助支承板。
所述辅助支承板上设置有辅助固定支承轴,所述辅助固定支承轴通过辅助支承轴承与辅助支承板相连。
所述行星架与关节转筒之间采用固定连接。
所述行星架与关节转筒之间采用螺栓连接。
本实用新型提供一种内置式行星减速关节,包括主固定支承轴、输入轴、行星架、关节转筒、第一轴承、关节支承轴承、第二轴承,输入轴设置在主固定支承轴内,输入轴与主固定支承轴之间通过第一轴承相连,关节转筒与行星架相连,关节转筒通过关节支承轴承与主固定支承轴相连,行星架通过第二轴承与主固定支承轴相连。输入轴上设置有中心轮,主固定支承轴上设置有固定轮。行星架上设置有太阳轮支承轴,太阳轮支承轴的两端分别设置有与中心轮相啮合的第一太阳轮、与固定轮相啮合的第二太阳轮。
本实用新型主要由主固定支承轴固定,固定在主固定支承轴内的伺服电机或液压马达输出动力,经输入轴带动中心轮转动。由于中心轮与第一太阳轮相啮合,固定轮与第二太阳轮相啮合。因此,输入轴带动中心轮转动,中心轮带动第一太阳轮,从而使第二太阳轮与固定轮之间形成公转。太阳轮支承轴定位在行星架上,行星架与关节转筒相连,最终实现关节转筒的减速定位旋转导向转动。
使用时,将主固定支承轴固定在固定臂上,同时将转动臂固定在关节转筒上,并在主固定支承轴上安装伺服电机或液压马达,伺服电机或液压马达的轴与输入轴相连。当伺服电机或液压马达转动时,输入轴带动中心轮转动,中心轮带动第一太阳轮转动。由于第一太阳轮、第二太阳轮设置在太阳轮支承轴上,因此,第一太阳轮会带动第二太阳轮转动。由于固定轮设置在主固定支承轴上,因而,第二太阳轮会与固定轮之间形成公转,从而带动行星架转动,行星架带动关节转筒转动,最终带动转动臂转动。本实用新型能够实现行星减速关节转动与减速的目的,不仅有效减轻了关节驱动部分的重量,而且有效降低了关节型机器人的转动惯量。
作为优选,固定轮为外齿固定轮或内齿固定轮。设置在主固定支承轴上的固定轮,其能够与第二太阳轮之间形成公转,可以根据需要,选择外齿固定轮或内齿固定轮。
作为优选,关节转筒上设置有辅助支承板。辅助支承板能够用于其它设备的安装,提高本实用新型的适应性。作为优选,辅助支承板上设置有辅助固定支承轴,辅助固定支承轴通过辅助支承轴承与辅助支承板相连。本实用新型设置辅助固定支承轴能够有效增强本实用新型的支承强度,提高其适应性。使用时,可以将辅助固定支承轴也设置在固定臂上。本实用新型中,主固定支承轴主要用于实现关节旋筒的旋转定位,辅助固定支承轴则用于提高本实用新型的支承刚度。
作为优选,行星架与关节转筒之间采用固定连接,进一步,行星架与关节转筒之间采用螺栓连接。采用螺栓连接更便于设备的安装及维护。本实用新型突破传统现有关节型机器人关节的局限,将减速器与关节旋转定位导向融为一体,有效解决了现有技术的不足。本实用新型能够有效减小减速器的尺寸结构,降低减速器的重量,同时实现大减速比。本实用新型在确保关节旋转定位导向功能的同时,能够实现减速比在8~64之间,并具有结构紧凑、传动精度高、重量轻的特点和优势。本实用新型能够用于关节型机器人的旋转关节及其他减速回转装置领域,同时,还可以根据需要,设计更大的减速比,从而满足设备的需要。
附图说明
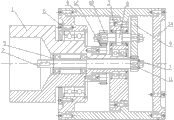
图1是实施例1的结构示意图。
图2是实施例2的结构示意图。
图3是实施例3的结构示意图。
图中标记:1为主固定支承轴,2为输入轴,3为行星架,4为关节转筒,5为第一轴承,6为关节支承轴承,7为第二轴承,8为太阳轮支承轴,9为第一太阳轮,10为第二太阳轮,11为中心轮,12为外齿固定轮,13为内齿固定轮,14为辅助支承板,15为辅助固定支承轴,16为辅助支承轴承。
具体实施方式
下面结合附图,对本实用新型作详细的说明。
为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
实施例1
如图所示,一种内置式行星减速关节,包括主固定支承轴1、输入轴2、行星架3、关节转筒4、第一轴承5、关节支承轴承6、第二轴承7,输入轴2设置在主固定支承轴1内,输入轴2与主固定支承轴1之间通过第一轴承5相连,关节转筒4与行星架3相连,关节转筒4通过关节支承轴承6与主固定支承轴1相连,行星架3通过第二轴承7与主固定支承轴1相连。输入轴2上设置有中心轮11,主固定支承轴1上设置有固定轮。行星架3上设置有太阳轮支承轴8,太阳轮支承轴8的两端分别设置有与中心轮11相啮合的第一太阳轮9、与固定轮相啮合的第二太阳轮10。关节转筒4上还设置有辅助支承板14。
实施例2
如图所示,一种内置式行星减速关节,包括主固定支承轴1、设置在主固定支承轴1内的输入轴2、行星架3、与行星架3相连的关节转筒4、第一轴承5、关节支承轴承6、第二轴承7、辅助支承板14、辅助固定支承轴15、辅助支承轴承16,输入轴2与主固定支承轴1之间通过第一轴承5相连,关节转筒4通过关节支承轴承6与主固定支承轴1相连,行星架3通过第二轴承7与主固定支承轴1相连。行星架3上设置有太阳轮支承轴8,太阳轮支承轴8上分别设置有第一太阳轮9、第二太阳轮10。输入轴2上设置有中心轮11,中心轮11与第一太阳轮9相啮合,主固定支承轴1上设置有固定轮,所述固定轮与第二太阳轮10相啮合。辅助支承板14设置在关节套筒上,辅助固定支承轴15通过辅助支承轴承16与辅助支承板14相连。其中,固定轮为内齿固定轮13,行星架3与关节转筒4之间采用螺栓连接。
其中,主固定支承轴1主要起固定作用,使用时,将主固定支承轴1固定在固定臂上,同时将转动臂固定在关节转筒4上,并在主固定支承轴1上安装伺服电机或液压马达,伺服电机或液压马达的轴与输入轴2相连。伺服电机或液压马达通过输入轴2带动中心轮11转动,中心轮11带动第一太阳轮9转动。第一太阳轮9、第二太阳轮10同步转动,第二太阳轮10与内齿固定轮13相啮合,从而带动行星架3转动,行星架3带动关节转筒4转动,最终实现转动臂的旋转定位。
实施例3
如图所示,一种内置式行星减速关节,包括主固定支承轴1、输入轴2、行星架3、与行星架3相连的关节转筒4、第一轴承5、关节支承轴承6、第二轴承7、辅助支承板14、辅助固定支承轴15、辅助支承轴承16,输入轴2设置在主固定支承轴1内,关节转筒4与行星架3固定连接,输入轴2与主固定支承轴1之间通过第一轴承5相连,关节转筒4通过关节支承轴承6与主固定支承轴1相连,行星架3通过第二轴承7与主固定支承轴1相连。输入轴2上设置有中心轮11,主固定支承轴1上设置有固定轮,行星架3上设置有太阳轮支承轴8,太阳轮支承轴8上分别设置有第一太阳轮9、第二太阳轮10,中心轮11与第一太阳轮9相啮合,固定轮与第二太阳轮10相啮合。辅助支承板14设置在关节套筒上,辅助固定支承轴15通过辅助支承轴承16与辅助支承板14相连。其中,固定轮为外齿固定轮12。
本实用新型通过中心轮11、固定轮、第一太阳轮9、第二太阳轮10之间的相互配合,能够有效调节关节转筒4的转速,本实用新型能够实现减速比在8~64之间。
使用时,将伺服电机安装在主固定支承轴1上,通过联轴器与输入轴2相连,输入轴2由第一轴承5支承定位。输入轴2带动中心轮11转动,中心轮11带动第一太阳轮9转动,同时使与第一太阳轮9一同安装在太阳轮支承轴8上的第二太阳轮10,与外齿固定轮12发生公转,从而使太阳轮支承轴8带动行星架3转动,最终带动与行星架3相连的关节转筒4转动。为了提高本实用新型支承的强度,本实用新型在关节套筒上设置辅助支承板14,辅助固定支承轴15通过辅助支承轴承16与辅助支承板14相连。辅助固定支承轴15能够有效起到增加支承强度的作用。
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
Claims (7)
1.一种内置式行星减速关节,其特征在于,包括主固定支承轴(1)、设置在主固定支承轴(1)内的输入轴(2)、行星架(3)、与行星架(3)相连的关节转筒(4)、第一轴承(5)、关节支承轴承(6)、第二轴承(7),所述输入轴(2)与主固定支承轴(1)之间通过第一轴承(5)相连,所述关节转筒(4)通过关节支承轴承(6)与主固定支承轴(1)相连,所述行星架(3)上设置有太阳轮支承轴(8),所述太阳轮支承轴(8)上分别设置有第一太阳轮(9)、第二太阳轮(10),所述输入轴(2)上设置有中心轮(11),所述中心轮(11)与第一太阳轮(9)相啮合,所述主固定支承轴(1)上设置有固定轮,所述固定轮与第二太阳轮(10)相啮合。
2.根据权利要求1所述的内置式行星减速关节,其特征在于,所述行星架(3)通过第二轴承(7)与主固定支承轴(1)相连。
3.根据权利要求1所述的内置式行星减速关节,其特征在于,所述固定轮为外齿固定轮(12)或内齿固定轮(13)。
4.根据权利要求1-3任一项所述的内置式行星减速关节,其特征在于,所述关节转筒(4)上设置有辅助支承板(14)。
5.根据权利要求4所述的内置式行星减速关节,其特征在于,所述辅助支承板(14)上设置有辅助固定支承轴(15),所述辅助固定支承轴(15)通过辅助支承轴承(16)与辅助支承板(14)相连。
6.根据权利要求4所述的内置式行星减速关节,其特征在于,所述行星架(3)与关节转筒(4)之间采用固定连接。
7.根据权利要求6所述的内置式行星减速关节,其特征在于,所述行星架(3)与关节转筒(4)之间采用螺栓连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201320177724 CN203214782U (zh) | 2013-04-11 | 2013-04-11 | 一种内置式行星减速关节 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201320177724 CN203214782U (zh) | 2013-04-11 | 2013-04-11 | 一种内置式行星减速关节 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN203214782U true CN203214782U (zh) | 2013-09-25 |
Family
ID=49204323
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201320177724 Expired - Fee Related CN203214782U (zh) | 2013-04-11 | 2013-04-11 | 一种内置式行星减速关节 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN203214782U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112145630A (zh) * | 2020-09-26 | 2020-12-29 | 南京好龙电子有限公司 | 具有行星架定位机构的行星齿轮减速器 |
-
2013
- 2013-04-11 CN CN 201320177724 patent/CN203214782U/zh not_active Expired - Fee Related
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112145630A (zh) * | 2020-09-26 | 2020-12-29 | 南京好龙电子有限公司 | 具有行星架定位机构的行星齿轮减速器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105840742A (zh) | 滚动推杆活齿机器人关节减速器 | |
| CN203214782U (zh) | 一种内置式行星减速关节 | |
| CN105697663B (zh) | 一种实现谐波减速器应用于双向传动的机械装置 | |
| CN105080734A (zh) | 一种新型离心机静态配平装置 | |
| CN102490061A (zh) | 机床主轴行星轮变速装置 | |
| CN205219109U (zh) | 带有取料夹持装置的数控机械臂 | |
| CN205843951U (zh) | 一种轮系传动性能测试系统 | |
| CN205771393U (zh) | 一种电动滚筒同步输送装置 | |
| CN104964004A (zh) | 一种工业机器人rv减速器 | |
| CN207715670U (zh) | 一种转差同步器 | |
| CN205715472U (zh) | 滚动推杆活齿机器人关节减速器 | |
| CN208345589U (zh) | 一种环轨起重机回转台车驱动装置 | |
| CN203939937U (zh) | 一种变速器 | |
| CN210834161U (zh) | 一种封闭式双联三叉式万向联轴器效率测试装置 | |
| CN205118193U (zh) | 机械齿轮无限式无级变速器 | |
| CN208764254U (zh) | 一种摩擦传动行星减速机型数控轴 | |
| CN102979882A (zh) | 省力、省距离、省工机械 | |
| CN87209455U (zh) | 套筒活齿少齿差传动装置 | |
| CN105904774B (zh) | 纸袋开底装置 | |
| CN205001466U (zh) | 关节式直线运动机构 | |
| CN204852191U (zh) | 一种工业机器人rv减速器 | |
| CN105805235B (zh) | 齿轮减速器及起吊装置 | |
| CN206192649U (zh) | 一种行星轮系和差动轮系传动系统机械特性测试实验台 | |
| CN104692303A (zh) | 一种电驱动折叠臂高空作业车及其调平系统和调平方法 | |
| CN204372061U (zh) | 齿轮减速器及起吊装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20130925 Termination date: 20180411 |