CN203166399U - 一种输电线路除障机器人 - Google Patents
一种输电线路除障机器人 Download PDFInfo
- Publication number
- CN203166399U CN203166399U CN 201320101186 CN201320101186U CN203166399U CN 203166399 U CN203166399 U CN 203166399U CN 201320101186 CN201320101186 CN 201320101186 CN 201320101186 U CN201320101186 U CN 201320101186U CN 203166399 U CN203166399 U CN 203166399U
- Authority
- CN
- China
- Prior art keywords
- transmission line
- traveling
- section
- wheel
- obstacle removal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

Landscapes
- Manipulator (AREA)
Abstract
本实用新型涉及一种输电线路除障机器人,包括机器人载体、带动机器人载体沿输电线移动的行走机构,行走机构包括若干个沿输电线滚动的行走轮,行走轮的轮周上开设有线槽,线槽具有两个相对的斜槽壁以及连接斜槽壁的槽底壁,槽底壁的宽度小于输电线的直径;当行走轮沿输电线运动时,输电线位于线槽中,且输电线仅与两个斜槽壁分别相点接触。由于本实用新型的输电线路除障机器人的行走轮在沿输电线行走时,输电线仅与斜槽壁相点接触,能够增加其与输电线之间的正压力,进而增加二者之间的摩擦力,在不增加夹持机构的情况下能够防止打滑,避免影响输电线路除障机器人的工作。
Description
技术领域
本实用新型涉及一种供电系统使用的作业设备,具体地说,涉及一种对输电线路进行检测、清障等作业的机器人。
背景技术
近年来,异物挂线已成为电网安全运行的极大威胁,运行部门常规在停电状态下采用地电位法处理,但该法受异物位置、线路周边地形地貌限制较大,停电处理又影响输电可靠性。如采用作业人员进入电场等电位作业又面临着作业工具老化、劳动强度和安全风险较大、作业效率低下的不利局面。如何在不影响电网正常运行和可靠供电的情况下,快速有效地清除线路上的异物,成为迫切需要解决的问题。
输电线路除障机器人以移动机器人为载体,携带检测仪器或作业工具,沿架空输电线路的地线或导线运动,对线路进行检测、清障等作业。利用机器人技术辅助解决挂线异物处理难题,提高输电线路挂线异物处理作业自动化作业程度,降低劳动强度,规避作业风险,具有很高的经济效益和社会效益。
目前,输电线路巡检机器人及输电线路除冰机器人研究较为广泛,以上两种机器人与输电线路除障机器人共同特点是都需要移动机器人载体在输电线上移动。为保证机器人的移动速度,目前采用较多的机构为轮式移动机构。现有的轮式移动机构的局部与输电线的结构参见附图1所示。由于上述轮式移动机构靠摩擦原理运动,机器人行走爬坡时容易因摩擦不足打滑,从而影响机器人在线上工作。现有的解决方案通常是在行走轮附近安装夹持机构,增大行走轮与输电线之间的正压力,从而增加摩擦力来解决行走轮打滑问题。上述方法较为常规,但夹持机构增加了机器人结构的复杂性,同时因为增加了驱动电机的数量,控制系统的复杂性随之增加,可靠性随之下降。
发明内容
本实用新型的目的是提供一种无需额外增加夹持机构、且能够解决行走轮在输电线上打滑问题的输电线路除障机器人。
为达到上述目的,本实用新型采用的技术方案是:
一种输电线路除障机器人,包括机器人载体、带动所述的机器人载体沿输电线移动的行走机构,所述的行走机构包括若干个沿所述的输电线滚动的行走轮,所述的行走轮的轮周上开设有线槽,所述的线槽具有两个相对的斜槽壁以及连接所述的斜槽壁的槽底壁,所述的槽底壁的宽度小于所述的输电线的直径;当所述的行走轮沿所述的输电线运动时,所述的输电线位于所述的线槽中,且所述的输电线仅与两个所述的斜槽壁分别相点接触。
优选的,所述的输电线的截面上的水平的直径将所述的输电线的截面分为上半圆和下半圆,所述的水平的直径与所述的输电线的截面的圆周的交点分别为左顶点和右顶点,所述的上半圆中竖直的半径与所述的上半圆的圆弧的交点为所述的输电线的上顶点,所述的斜槽壁与所述的输电线的接触点分别位于所述的上顶点与所述的左顶点之间的圆弧以及所述的上顶点与所述的右顶点之间的圆弧上。
优选的,所述的斜槽壁的截面为一直线段。
优选的,所述的槽底壁的截面为曲线段或直线段。
优选的,所述的槽底壁的截面为一段圆弧。
优选的,所述的行走轮由行走电机驱动;所述的行走电机的输出轴与所述的行走轮相同轴连接。
优选的,所述的行走轮外设置有“冂”字形的边框,所述的行走轮设置于所述的边框所形成的内凹空间中,所述的行走电机通过电机安装板安装于所述的边框的外部,所述的电机的输出轴与所述的边框之间安装有轴承。
优选的,所述的边框包括相固定连接的第一部分和第二部分,所述的第一部分为一平面板,所述的第二部分包括两端部垂直连接的平面板。
优选的,所述的电机的输出轴与所述的行走轮通过法兰相连接,所述的行走轮包括两相对的轮面,所述的行走轮的轴线处开设有通孔,所述的法兰包括具有空心孔的管端和连接于所述的管端的端部的凸缘,所述的管端插入所述的行走轮的通孔中且所述的凸缘抵在所述的行走轮的轮面上,所述的行走电机的输出轴插入所述的管端的空心孔中。
由于上述技术方案运用,本实用新型与现有技术相比具有下列优点:由于本实用新型的输电线路除障机器人的行走轮在沿输电线行走时,输电线仅与斜槽壁相点接触,能够增加其与输电线之间的正压力,进而增加二者之间的摩擦力,在不增加夹持机构的情况下能够防止打滑,避免影响输电线路除障机器人的工作。
附图说明
附图1为现有技术中行走轮与输电线的局部结构示意图。
附图2为本实用新型的输电线路除障机器人的实施例一的行走轮的轴测图。
附图3为本实用新型的输电线路除障机器人的实施例一的行走轮的主视图。
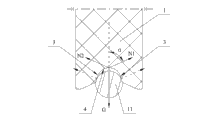
附图4为本实用新型的输电线路除障机器人的实施例二的行走轮的剖面局部示意图。
以上附图中:1、行走轮;2、线槽;3、斜槽壁;4、槽底壁;5、行走电机;6、边框;7、第一部分;8、第二部分;9、电机安装板;10、法兰;11、输电线。
具体实施方式
下面结合附图所示的实施例对本实用新型作进一步描述。
实施例一:参见附图2和附图3所示。
一种输电线路除障机器人,包括机器人载体、带动机器人载体沿输电线11移动的行走机构。行走机构包括若干个沿输电线11滚动的行走轮1。输电线11的截面上的水平的直径将输电线11的截面分为上半圆和下半圆,水平的直径与输电线11的截面的圆周的交点分别为左顶点和右顶点,上半圆中竖直的半径与上半圆的圆弧的交点为输电线11的上顶点。
行走轮1的轮周上开设有线槽2。线槽2具有两个相对的斜槽壁3以及连接斜槽壁3的槽底壁4。斜槽壁3为一环形圆锥面,且其截面为一直线段。而槽底壁4的截面为曲线段或直线段,且槽底壁4的宽度小于输电线11的直径。在本实施例中,槽底壁4的截面为直线段,即槽底壁4为一柱形面。其线槽2的截面呈梯形,且该梯形的长度较长的底边位于线槽2的槽口处。
当行走轮1沿输电线11运动时,输电线11位于线槽2中,且输电线11仅与两个斜槽壁3分别相点接触。具体地说斜槽壁3与输电线11的接触点分别位于上顶点与左顶点之间的圆弧以及上顶点与右顶点之间的圆弧上,而输电线11与槽底壁4之间并不接触。
行走轮1由行走电机5驱动,行走电机5的输出轴与行走轮1相同轴连接。行走轮1外设置有“冂”字形的边框6,其包括相固定连接的第一部分7和第二部分8,第一部分7为一平面板,第二部分8包括两端部垂直连接的平面板。行走轮1设置于边框6所形成的内凹空间中,行走电机5通过电机安装板9安装于边框6的外部,电机的输出轴与边框6之间安装有轴承。电机的输出轴与行走轮1通过法兰10相连接,行走轮1包括两相对的轮面,行走轮1的轴线处开设有通孔,法兰10包括具有空心孔的管端和连接于管端的端部的凸缘,管端插入行走轮1的通孔中且凸缘抵在行走轮1的轮面上,行走电机5的输出轴插入管端的空心孔中。
实施例二:参见附图4所示。与实施例一的不同之处在于:线槽2的槽底壁4的截面为一段圆弧,线槽2的截面由线槽2的截面有两条直线段即一条圆弧围成而形成类梯形。
由附图4和附图1中受力分析可知,现有行走轮1受力,其最大静摩擦力f=μN=μG,其中μ为摩擦系数,N为正压力,G为机器人的重力。
而本实用新型的行走轮1,其最大静摩擦力f=μG/cosα。因此在没有提供额外正压力的情况下,就能够增大行走轮1与输电线11之间的最大静摩擦力,解决了机器人线上行走打滑问题。
上述具有梯形或类梯形轮缘的行走轮1及输电线路除障机器人,可以适应直径不同的输电线11路,输电线11路线径的改变不影响输电线11与行走轮1之间的受力情况,可以有效的解决机器人行走轮1打滑的情况。
上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
Claims (9)
1.一种输电线路除障机器人,包括机器人载体、带动所述的机器人载体沿输电线移动的行走机构,所述的行走机构包括若干个沿所述的输电线滚动的行走轮,其特征在于:所述的行走轮的轮周上开设有线槽,所述的线槽具有两个相对的斜槽壁以及连接所述的斜槽壁的槽底壁,所述的槽底壁的宽度小于所述的输电线的直径;
当所述的行走轮沿所述的输电线运动时,所述的输电线位于所述的线槽中,且所述的输电线仅与两个所述的斜槽壁分别相点接触。
2.根据权利要求1所述的一种输电线路除障机器人,其特征在于:所述的输电线的截面上的水平的直径将所述的输电线的截面分为上半圆和下半圆,所述的水平的直径与所述的输电线的截面的圆周的交点分别为左顶点和右顶点,所述的上半圆中竖直的半径与所述的上半圆的圆弧的交点为所述的输电线的上顶点,所述的斜槽壁与所述的输电线的接触点分别位于所述的上顶点与所述的左顶点之间的圆弧以及所述的上顶点与所述的右顶点之间的圆弧上。
3.根据权利要求1或2所述的一种输电线路除障机器人,其特征在于:所述的斜槽壁的截面为一直线段。
4.根据权利要求1或2所述的一种输电线路除障机器人,其特征在于:所述的槽底壁的截面为曲线段或直线段。
5.根据权利要求4所述的一种输电线路除障机器人,其特征在于:所述的槽底壁的截面为一段圆弧。
6.根据权利要求1所述的一种输电线路除障机器人,其特征在于:所述的行走轮由行走电机驱动;所述的行走电机的输出轴与所述的行走轮相同轴连接。
7.根据权利要求6所述的一种输电线路除障机器人,其特征在于:所述的行走轮外设置有“冂”字形的边框,所述的行走轮设置于所述的边框所形成的内凹空间中,所述的行走电机通过电机安装板安装于所述的边框的外部,所述的电机的输出轴与所述的边框之间安装有轴承。
8.根据权利要求7所述的一种输电线路除障机器人,其特征在于:所述的边框包括相固定连接的第一部分和第二部分,所述的第一部分为一平面板,所述的第二部分包括两端部垂直连接的平面板。
9.根据权利要求7所述的一种输电线路除障机器人,其特征在于:所述的电机的输出轴与所述的行走轮通过法兰相连接,所述的行走轮包括两相对的轮面,所述的行走轮的轴线处开设有通孔,所述的法兰包括具有空心孔的管端和连接于所述的管端的端部的凸缘,所述的管端插入所述的行走轮的通孔中且所述的凸缘抵在所述的行走轮的轮面上,所述的行走电机的输出轴插入所述的管端的空心孔中。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201320101186 CN203166399U (zh) | 2013-03-06 | 2013-03-06 | 一种输电线路除障机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 201320101186 CN203166399U (zh) | 2013-03-06 | 2013-03-06 | 一种输电线路除障机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN203166399U true CN203166399U (zh) | 2013-08-28 |
Family
ID=49027559
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 201320101186 Expired - Lifetime CN203166399U (zh) | 2013-03-06 | 2013-03-06 | 一种输电线路除障机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN203166399U (zh) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103151728A (zh) * | 2013-03-06 | 2013-06-12 | 江苏省电力公司苏州供电公司 | 一种输电线路除障机器人 |
| US9534906B2 (en) | 2015-03-06 | 2017-01-03 | Wal-Mart Stores, Inc. | Shopping space mapping systems, devices and methods |
| US10017322B2 (en) | 2016-04-01 | 2018-07-10 | Wal-Mart Stores, Inc. | Systems and methods for moving pallets via unmanned motorized unit-guided forklifts |
| US10346794B2 (en) | 2015-03-06 | 2019-07-09 | Walmart Apollo, Llc | Item monitoring system and method |
| US11046562B2 (en) | 2015-03-06 | 2021-06-29 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods |
| US12084824B2 (en) | 2015-03-06 | 2024-09-10 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods |
| US12366043B2 (en) | 2015-03-06 | 2025-07-22 | Walmart Apollo, Llc | Overriding control of motorized transport unit systems, devices and methods |
-
2013
- 2013-03-06 CN CN 201320101186 patent/CN203166399U/zh not_active Expired - Lifetime
Cited By (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103151728A (zh) * | 2013-03-06 | 2013-06-12 | 江苏省电力公司苏州供电公司 | 一种输电线路除障机器人 |
| CN103151728B (zh) * | 2013-03-06 | 2016-08-10 | 江苏省电力公司苏州供电公司 | 一种输电线路除障机器人 |
| US10287149B2 (en) | 2015-03-06 | 2019-05-14 | Walmart Apollo, Llc | Assignment of a motorized personal assistance apparatus |
| US10081525B2 (en) | 2015-03-06 | 2018-09-25 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods to address ground and weather conditions |
| US9801517B2 (en) | 2015-03-06 | 2017-10-31 | Wal-Mart Stores, Inc. | Shopping facility assistance object detection systems, devices and methods |
| US9875502B2 (en) | 2015-03-06 | 2018-01-23 | Wal-Mart Stores, Inc. | Shopping facility assistance systems, devices, and methods to identify security and safety anomalies |
| US9875503B2 (en) | 2015-03-06 | 2018-01-23 | Wal-Mart Stores, Inc. | Method and apparatus for transporting a plurality of stacked motorized transport units |
| US9896315B2 (en) | 2015-03-06 | 2018-02-20 | Wal-Mart Stores, Inc. | Systems, devices and methods of controlling motorized transport units in fulfilling product orders |
| US9908760B2 (en) | 2015-03-06 | 2018-03-06 | Wal-Mart Stores, Inc. | Shopping facility assistance systems, devices and methods to drive movable item containers |
| US9994434B2 (en) | 2015-03-06 | 2018-06-12 | Wal-Mart Stores, Inc. | Overriding control of motorize transport unit systems, devices and methods |
| US12366043B2 (en) | 2015-03-06 | 2025-07-22 | Walmart Apollo, Llc | Overriding control of motorized transport unit systems, devices and methods |
| US10071893B2 (en) | 2015-03-06 | 2018-09-11 | Walmart Apollo, Llc | Shopping facility assistance system and method to retrieve in-store abandoned mobile item containers |
| US10071891B2 (en) | 2015-03-06 | 2018-09-11 | Walmart Apollo, Llc | Systems, devices, and methods for providing passenger transport |
| US10071892B2 (en) | 2015-03-06 | 2018-09-11 | Walmart Apollo, Llc | Apparatus and method of obtaining location information of a motorized transport unit |
| US10315897B2 (en) | 2015-03-06 | 2019-06-11 | Walmart Apollo, Llc | Systems, devices and methods for determining item availability in a shopping space |
| US10130232B2 (en) | 2015-03-06 | 2018-11-20 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods |
| US10138100B2 (en) | 2015-03-06 | 2018-11-27 | Walmart Apollo, Llc | Recharging apparatus and method |
| US10189691B2 (en) | 2015-03-06 | 2019-01-29 | Walmart Apollo, Llc | Shopping facility track system and method of routing motorized transport units |
| US10189692B2 (en) | 2015-03-06 | 2019-01-29 | Walmart Apollo, Llc | Systems, devices and methods for restoring shopping space conditions |
| US12123155B2 (en) | 2015-03-06 | 2024-10-22 | Walmart Apollo, Llc | Apparatus and method of monitoring product placement within a shopping facility |
| US10239738B2 (en) | 2015-03-06 | 2019-03-26 | Walmart Apollo, Llc | Apparatus and method of monitoring product placement within a shopping facility |
| US10239740B2 (en) | 2015-03-06 | 2019-03-26 | Walmart Apollo, Llc | Shopping facility assistance system and method having a motorized transport unit that selectively leads or follows a user within a shopping facility |
| US10239739B2 (en) | 2015-03-06 | 2019-03-26 | Walmart Apollo, Llc | Motorized transport unit worker support systems and methods |
| US10280054B2 (en) | 2015-03-06 | 2019-05-07 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods |
| US9757002B2 (en) | 2015-03-06 | 2017-09-12 | Wal-Mart Stores, Inc. | Shopping facility assistance systems, devices and methods that employ voice input |
| US9534906B2 (en) | 2015-03-06 | 2017-01-03 | Wal-Mart Stores, Inc. | Shopping space mapping systems, devices and methods |
| US10508010B2 (en) | 2015-03-06 | 2019-12-17 | Walmart Apollo, Llc | Shopping facility discarded item sorting systems, devices and methods |
| US10346794B2 (en) | 2015-03-06 | 2019-07-09 | Walmart Apollo, Llc | Item monitoring system and method |
| US10351400B2 (en) | 2015-03-06 | 2019-07-16 | Walmart Apollo, Llc | Apparatus and method of obtaining location information of a motorized transport unit |
| US10351399B2 (en) | 2015-03-06 | 2019-07-16 | Walmart Apollo, Llc | Systems, devices and methods of controlling motorized transport units in fulfilling product orders |
| US10358326B2 (en) | 2015-03-06 | 2019-07-23 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods |
| US10435279B2 (en) | 2015-03-06 | 2019-10-08 | Walmart Apollo, Llc | Shopping space route guidance systems, devices and methods |
| US10486951B2 (en) | 2015-03-06 | 2019-11-26 | Walmart Apollo, Llc | Trash can monitoring systems and methods |
| US10336592B2 (en) | 2015-03-06 | 2019-07-02 | Walmart Apollo, Llc | Shopping facility assistance systems, devices, and methods to facilitate returning items to their respective departments |
| US10570000B2 (en) | 2015-03-06 | 2020-02-25 | Walmart Apollo, Llc | Shopping facility assistance object detection systems, devices and methods |
| US10597270B2 (en) | 2015-03-06 | 2020-03-24 | Walmart Apollo, Llc | Shopping facility track system and method of routing motorized transport units |
| US10611614B2 (en) | 2015-03-06 | 2020-04-07 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods to drive movable item containers |
| US10633231B2 (en) | 2015-03-06 | 2020-04-28 | Walmart Apollo, Llc | Apparatus and method of monitoring product placement within a shopping facility |
| US10669140B2 (en) | 2015-03-06 | 2020-06-02 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods to detect and handle incorrectly placed items |
| US10815104B2 (en) | 2015-03-06 | 2020-10-27 | Walmart Apollo, Llc | Recharging apparatus and method |
| US10875752B2 (en) | 2015-03-06 | 2020-12-29 | Walmart Apollo, Llc | Systems, devices and methods of providing customer support in locating products |
| US11034563B2 (en) | 2015-03-06 | 2021-06-15 | Walmart Apollo, Llc | Apparatus and method of monitoring product placement within a shopping facility |
| US11046562B2 (en) | 2015-03-06 | 2021-06-29 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods |
| US11679969B2 (en) | 2015-03-06 | 2023-06-20 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods |
| US11761160B2 (en) | 2015-03-06 | 2023-09-19 | Walmart Apollo, Llc | Apparatus and method of monitoring product placement within a shopping facility |
| US11840814B2 (en) | 2015-03-06 | 2023-12-12 | Walmart Apollo, Llc | Overriding control of motorized transport unit systems, devices and methods |
| US12084824B2 (en) | 2015-03-06 | 2024-09-10 | Walmart Apollo, Llc | Shopping facility assistance systems, devices and methods |
| US10214400B2 (en) | 2016-04-01 | 2019-02-26 | Walmart Apollo, Llc | Systems and methods for moving pallets via unmanned motorized unit-guided forklifts |
| US10017322B2 (en) | 2016-04-01 | 2018-07-10 | Wal-Mart Stores, Inc. | Systems and methods for moving pallets via unmanned motorized unit-guided forklifts |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN203166399U (zh) | 一种输电线路除障机器人 | |
| CN205201503U (zh) | 一种搭载机械手的agv小车 | |
| CN203942206U (zh) | 一种输电线路巡线机器人 | |
| CN202829334U (zh) | 电缆拖令 | |
| CN102305067A (zh) | 一种掘进机机构 | |
| CN103151728B (zh) | 一种输电线路除障机器人 | |
| CN209167459U (zh) | 一种输电线路行走检测装置 | |
| CN102324713A (zh) | 一种管道绳索牵引装置 | |
| CN204173039U (zh) | 一种变电站四轮驱动巡检机器人 | |
| CN111389820A (zh) | 一种金属油气管道表面激光除漆设备 | |
| CN203622111U (zh) | 一种弯管内表面打磨头 | |
| CN204567830U (zh) | 三角履带式爬壁机器人 | |
| CN205204670U (zh) | 一种用于管道、型材安装的搬运小车 | |
| CN203551481U (zh) | 一种轮胎外观检查设备 | |
| CN104742993A (zh) | 三角履带式爬壁机器人 | |
| CN202197060U (zh) | 一种管道绳索牵引装置 | |
| CN104234486A (zh) | 一种对称式链条拽引停车平台横移驱动机构 | |
| CN211423703U (zh) | 一种基于超声波技术的管道堵塞检测装置 | |
| CN205565521U (zh) | 高压电线行走机构 | |
| CN204112812U (zh) | 一种对称式链条拽引停车平台横移驱动机构 | |
| CN102718133A (zh) | 起重机起吊小车 | |
| CN104712879B (zh) | 可承受较大工作载荷且适用不同直径管道的内壁自行走小车 | |
| CN203166398U (zh) | 输电线路除障机器人 | |
| CN203682926U (zh) | 一种门式起重机供电电缆翻转保护装置 | |
| CN103552580B (zh) | 液压轮转器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term |
Granted publication date: 20130828 |
|
| CX01 | Expiry of patent term |