CN201658806U - 一种自动拳击训练机器人 - Google Patents
一种自动拳击训练机器人 Download PDFInfo
- Publication number
- CN201658806U CN201658806U CN2010201108788U CN201020110878U CN201658806U CN 201658806 U CN201658806 U CN 201658806U CN 2010201108788 U CN2010201108788 U CN 2010201108788U CN 201020110878 U CN201020110878 U CN 201020110878U CN 201658806 U CN201658806 U CN 201658806U
- Authority
- CN
- China
- Prior art keywords
- fixed
- robot
- trunk
- bearing
- shadowbox
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Abstract
一种自动拳击训练机器人,底座的短腿(01)、长腿(04)连接在中心座(02)上组成支撑腿,支撑腿外端安装地脚,立柱(08)是机器人的下身支撑,安装在中心座上,支柱(06)与立柱、横梁连接;上身部的电动机固定在电机架(12)上,该电机架以及传动机构固定在躯干(09)上;躯干上固定有轴承架梁(18);躯干的前侧顶端,固定有头托(21);躯干的前侧上部固定有肩架(22);躯干的前侧中下部,设有气囊固定部(31);气囊托板(32)固定在躯干前部底端;出拳部由小臂和由四连杆结构的大臂组成。通过击打机器人头部及上身,并通过控制系统控制机器人双臂有序或随机出拳,达到训练运动员的反应及体能功能,并可作为人们娱乐健身的器械。
Description
技术领域
本实用新型涉及的是一种新型拳击训练、健身及娱乐型机器人,为拳击运动员训练、普通群众健身和娱乐而设计开发的一种运动器械。
背景技术
自动拳击训练、健身及娱乐机器人是根据国家拳击队训练需求而开发的一种运动器械。是在2003年为国家拳击队开发的训练机器人(奥运项目)基础上,作为科技转化而产生的新型产品。它不仅可作为专业拳击运动员训练用器械,而且可以面向大众,作为健身及娱乐的运动器械。
目前国内还没有类似的拳击训练机器人,因此,亟待开发出一种达到训练运动员的反应及体能的自动拳击训练机器人。
实用新型内容
本实用新型的目的在于,通过提供一种自动拳击训练机器人,以使它可以通过击打机器人头部及上身,并通过控制系统控制机器人双臂有序或随机出拳,达到训练运动员的反应及体能功能,并可以显示拳重和俏皮语音的播报,作为人们娱乐健身的器械。
本实用新型是通过以下技术手段实现的:
一种自动拳击训练机器人,包括:由可以调整高度的底座部、上身部、躯干部以及出拳部,其中底座部分的短腿、长腿连接在中心座上组成支撑腿,支撑腿外端安装地脚,立柱是机器人的下身支撑,安装在中心座上,支柱与立柱、横梁连接;所述上身部,其电动机固定在电机架上,该电机架以及传动机构固定在躯干上;躯干上还固定有用以固定轴承架的轴承架梁;躯干的前侧顶端,固定有用以固定气囊的头部的头托;躯干的前侧上部固定有肩架;躯干的前侧中下部,设有用以固定气囊的气囊固定部;托起气囊的气囊托板固定在躯干前部底端;出拳部由小臂和由四连杆结构的大臂组成。
前述的肩架前端固定有固定出拳机构的肩板。
前述的小臂首端固定拳套,末端与大臂相连。
前述的大臂由四连杆组成,通过关节轴承和销轴连接在肩骨上;肩骨使四连杆形成了一个向内侧加紧的角度,肩骨固定在使四连杆形成了一个相对铅垂平面角度的斜块上,斜块与肩板固定在一起,延长杆通过关节轴承和销轴与传动机构的连杆连接。
前述的传动机构包括大带轮和小带轮;其中,大带轮固定在电机轴上,轴承架固定在轴承架梁上,转轴通过滚珠轴承安装在轴承架上;小带轮和曲柄的一端通过键安装在转轴上,连杆的一端通过关节轴承和销轴与曲柄的另一端连接,连杆的另一端通过关节轴承和出拳机构的延长杆连接。
前述的上身部设有传感器和语音系统。
本实用新型一种自动拳击训练机器人,与现有技术相比,具有以下明显的优势和有益效果:
本实用新型一种自动拳击训练机器人,可以通过击打左右打击板使机器人手臂产生直摆拳和扣押拳,达到训练运动员的反应及体能功能,不仅可作为专业拳击运动员训练用器械,而且可以面向大众,作为健身及娱乐的运动器械。
附图说明
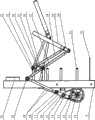
图1为自动拳击底座视图;
图2为自动拳击上身视图;
其中,1为短腿,2为中心座,3为拉板,4为长腿,5为横梁,6为支架,7为地脚,8为立柱,9为躯干,10为大带轮,11为电机,12为电机架,13为V型带,14为轴承架,15为转轴,16为小带轮,17为曲柄,18为轴承架梁,19为连杆,20为关节轴承,21为头托,22为肩架,23为延长杆,24为肩板,25为斜块,26为肩骨,27为肱三,28为肱二,29为小臂,30为肘关节,31为气囊固定部,32为气囊托板。
具体实施方式
下面结合附图,介绍本实施例:
机构之间的关系及构造
底座由部件1~8组成,短腿1和长腿4用销轴连接在中心座2上组成支撑腿。立柱8是机器人的下身支撑,用销轴安装在中心座2上,支柱6与立柱8、横梁5用销轴连接起到支撑立柱8的作用。
拆掉横梁5后可实现折叠。
上身由躯干9、电机架12、轴承架梁18、头托21、肩架22、肩板24、气囊固定部31、气囊托板32组成。
电机架12用螺钉固定在躯干9后侧底部,用以固定电动机。轴承架梁18焊接在躯干09后侧下部,用以固定轴承架。头托21通过螺钉固定在躯干09前侧顶端,用以固定气囊的头部。肩架22焊接在躯干09前侧上部,肩板24焊接在肩架22前端,肩板24用以固定出拳机构。气囊固定31通过焊接固定在躯干9前侧中下部,用以固定气囊,使其背部紧贴躯干9前侧。气囊托板32用螺钉固定在躯干9前部底端,用来托起气囊。
出拳机构由延长杆23、斜块25、肩骨26、肱三27、肱二28、小臂29、肘关节30组成。
小臂29:由聚氨酯材料制成,首端是固定拳套,末端用螺栓与大臂相连。特点是材料具有所需要的刚性和柔性,避免对打击者的伤害。
大臂:由四连杆(27、28、30)组成,通过关节轴承和销轴连接在肩骨26上。达到产生直摆拳效果。肩骨26使四连杆形成了一个向内侧加紧的角度。肩骨26通过螺栓固定在斜块25上。斜块25使整个四连杆形成了一个相对铅垂平面的角度。斜块25通过螺栓与肩板24固定在一起。延长杆23通过关节轴承和销轴与传动机构的连杆19连接。
传动机构由大带轮10、V型带13、轴承架14、转轴15、小带轮16、曲柄17、连杆19组成。
大带轮10用螺钉固定在电机11轴上,轴承架14用螺栓固定在轴承架梁18上,转轴15通过滚珠轴承安装在轴承架14上。小带轮16和曲柄17的一端通过键安装在转轴15上。连杆19的一端通过关节轴承和销轴与曲柄17的另一端连接,连杆19的另一端通过关节轴承和出拳机构的延长杆23连接。
出拳动作完成的过程:
电机11通电转动带动大带轮10,大带轮10通过V型带13带动小带轮16,小带轮16通过转轴15带动曲柄17,曲柄17通过连杆19拉动延长杆23使四连杆(27、28、30)动作。曲柄旋转一周,为一次击拳动作的动作周期。
以上的阐述只反映了机器人的机械部分,另外机器人上装有模拟人上半身(气袋结构)的传感器和语音系统(图中未示),当机器人被击打时,记录拳重和发出相应的语音。在击打过程中控制电机随机出拳,达到互动的效果。
最后应说明的是:以上实施例仅用以说明本实用新型而并非限制本实用新型所描述的技术方案;因此,尽管本说明书参照上述的各个实施例对本实用新型已进行了详细的说明,但是,本领域的普通技术人员应当理解,仍然可以对本实用新型进行修改或等同替换;而一切不脱离实用新型的精神和范围的技术方案及其改进,其均应涵盖在本实用新型的权利要求范围当中。
Claims (6)
1.一种自动拳击训练机器人,包括:由可以调整高度的底座部、上身部、躯干部以及出拳部,其特征在于:所述的底座部分,短腿(01)、长腿(04)连接在中心座(02)上组成支撑腿,支撑腿外端安装地脚,立柱(08)是机器人的下身支撑,安装在中心座上,支柱(06)与立柱(08)、横梁(05)连接;
所述的上身部,其电动机固定在电机架(12)上,该电机架以及传动机构固定在躯干(09)上;
所述躯干(09)上还固定有用以固定轴承架的轴承架梁(18);
所述躯干(09)的前侧顶端,固定有用以固定气囊的头部的头托(21);
所述躯干(09)的前侧上部固定有肩架(22);
所述躯干(09)的前侧中下部,设有用以固定气囊的气囊固定部(31);托起气囊的气囊托板(32)固定在躯干(09)前部底端;
所述的出拳部,由小臂和由四连杆结构的大臂组成。
2.根据权利要求1所述的一种自动拳击训练机器人,其特征在于:所述肩架(22)前端固定有固定出拳机构的肩板(24)。
3.根据权利要求1所述的一种自动拳击训练机器人,其特征在于:所述的小臂首端固定拳套,末端与大臂相连。
4.根据权利要求1或2所述的一种自动拳击训练机器人,其特征在于:所述的大臂由四连杆(27、28、30)组成,通过关节轴承和销轴连接在肩骨(26)上;肩骨(26)使四连杆形成了一个向内侧加紧的角度,肩骨(26)固定在使四连杆形成了一个相对铅垂平面角度的斜块(25)上,斜块(25)与肩板(24)固定在一起,延长杆(23)通过关节轴承和销轴与传动机构的连杆(19)连接。
5.根据权利要求1所述的一种自动拳击训练机器人,其特征在于:所述的传动机构包括大带轮(10)和小带轮(16);其中,大带轮(10)固定在电机(11)轴上,轴承架(14)固定在轴承架梁(18)上,转轴(15)通过滚珠轴承安装在轴承架(14)上;小带轮(16)和曲柄(17)的一端通过键安装在转轴(15)上,连杆(19)的一端通过关节轴承和销轴与曲柄(17)的另一端连接,连杆(19)的另一端通过关节轴承和出拳机构的延长杆(23)连接。
6.根据权利要求1所述的一种自动拳击训练机器人,其特征在于:所述的上身部设有传感器和语音系统。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010201108788U CN201658806U (zh) | 2010-02-05 | 2010-02-05 | 一种自动拳击训练机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2010201108788U CN201658806U (zh) | 2010-02-05 | 2010-02-05 | 一种自动拳击训练机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN201658806U true CN201658806U (zh) | 2010-12-01 |
Family
ID=43229215
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN2010201108788U Expired - Fee Related CN201658806U (zh) | 2010-02-05 | 2010-02-05 | 一种自动拳击训练机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN201658806U (zh) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103537087A (zh) * | 2013-09-23 | 2014-01-29 | 北京工业大学 | 一种用于娱乐健身的趣味拳击对打器械 |
| CN105920822A (zh) * | 2016-06-17 | 2016-09-07 | 山东师范大学 | 跆拳道训练用装置 |
| CN107095766A (zh) * | 2017-05-17 | 2017-08-29 | 台州学院 | 一种偏瘫康复训练器械 |
| CN107803038A (zh) * | 2017-12-04 | 2018-03-16 | 李秀梨 | 一种卧式儿童玩具 |
| CN108837468A (zh) * | 2018-06-23 | 2018-11-20 | 傅昕 | 一种拳术练习模拟装置 |
| CN109248427A (zh) * | 2018-11-03 | 2019-01-22 | 高婷婷 | 一种能够提高敏捷度的自由搏击训练器 |
| CN109260686A (zh) * | 2018-11-03 | 2019-01-25 | 高婷婷 | 一种能够提高敏捷度的自由搏击训练器的工作方法 |
| CN109331449A (zh) * | 2018-11-23 | 2019-02-15 | 张功溪 | 一种拳击运动防御训练台 |
-
2010
- 2010-02-05 CN CN2010201108788U patent/CN201658806U/zh not_active Expired - Fee Related
Cited By (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103537087B (zh) * | 2013-09-23 | 2015-07-29 | 北京工业大学 | 一种用于娱乐健身的趣味拳击对打器械 |
| CN103537087A (zh) * | 2013-09-23 | 2014-01-29 | 北京工业大学 | 一种用于娱乐健身的趣味拳击对打器械 |
| CN105920822B (zh) * | 2016-06-17 | 2019-05-28 | 山东师范大学 | 跆拳道训练用装置 |
| CN105920822A (zh) * | 2016-06-17 | 2016-09-07 | 山东师范大学 | 跆拳道训练用装置 |
| CN107095766A (zh) * | 2017-05-17 | 2017-08-29 | 台州学院 | 一种偏瘫康复训练器械 |
| CN107803038A (zh) * | 2017-12-04 | 2018-03-16 | 李秀梨 | 一种卧式儿童玩具 |
| CN108837468A (zh) * | 2018-06-23 | 2018-11-20 | 傅昕 | 一种拳术练习模拟装置 |
| CN109248427A (zh) * | 2018-11-03 | 2019-01-22 | 高婷婷 | 一种能够提高敏捷度的自由搏击训练器 |
| CN109260686A (zh) * | 2018-11-03 | 2019-01-25 | 高婷婷 | 一种能够提高敏捷度的自由搏击训练器的工作方法 |
| CN109248427B (zh) * | 2018-11-03 | 2020-04-24 | 高婷婷 | 一种能够提高敏捷度的自由搏击训练器 |
| CN109260686B (zh) * | 2018-11-03 | 2020-07-24 | 浙江森创服装股份有限公司 | 一种能够提高敏捷度的自由搏击训练器的工作方法 |
| CN109331449A (zh) * | 2018-11-23 | 2019-02-15 | 张功溪 | 一种拳击运动防御训练台 |
| CN109331449B (zh) * | 2018-11-23 | 2020-11-20 | 瑞安市登第门教育科技有限公司 | 一种拳击运动防御训练台 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN201658806U (zh) | 一种自动拳击训练机器人 | |
| CN106075853B (zh) | 一种羽毛球陪练机器人 | |
| CN108671474B (zh) | 一种具有减震功能的坡度可调节跑步机 | |
| CN104826312B (zh) | 一种啦啦操抛接力量专项训练器 | |
| CN100584413C (zh) | 高尔夫训练装置 | |
| CN105817015B (zh) | 侧空翻训练器 | |
| CN212757043U (zh) | 一种调节高度的体育训练用压腿装置 | |
| CN107837489A (zh) | 一种划船健身器、旋摆牵拉健身器及多功能健身装置及实现方法 | |
| CN102357296B (zh) | 乒乓球正手攻球挥拍器 | |
| KR20100053051A (ko) | 승마형 운동기구 | |
| CN208525726U (zh) | 一种划船健身器、旋摆牵拉健身器及多功能健身装置 | |
| CN201529354U (zh) | 冲浪式健身器 | |
| CN215822230U (zh) | 一种球类运动反弹网练习架 | |
| CN211659162U (zh) | 前后摆动单杆多功能健身器 | |
| CN202398038U (zh) | 一种健身车 | |
| CN101543675A (zh) | 专业拳击搏斗教练靶机 | |
| CN201684387U (zh) | 一种手动拳击训练机器人 | |
| CN201492890U (zh) | 专业拳击搏斗教练靶机 | |
| CN203996721U (zh) | 骑马车 | |
| CN211433968U (zh) | 一种律动机装置 | |
| CN209173336U (zh) | 一种篮球训练用摇臂机器人 | |
| CN201205439Y (zh) | 一种可用于拳击练习的健身椅 | |
| CN214019072U (zh) | 一种俯卧投球机 | |
| CN212214467U (zh) | 一种多功能健身摇摆机 | |
| CN2287979Y (zh) | 轨迹控制阻力自行车式训练器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20101201 Termination date: 20120205 |