CN1386955A - 丛式井互动自平衡机电一体化智能抽油机采油技术 - Google Patents
丛式井互动自平衡机电一体化智能抽油机采油技术 Download PDFInfo
- Publication number
- CN1386955A CN1386955A CN 02123953 CN02123953A CN1386955A CN 1386955 A CN1386955 A CN 1386955A CN 02123953 CN02123953 CN 02123953 CN 02123953 A CN02123953 A CN 02123953A CN 1386955 A CN1386955 A CN 1386955A
- Authority
- CN
- China
- Prior art keywords
- oil
- well
- self
- driving
- belt
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Landscapes
- Connection Of Motors, Electrical Generators, Mechanical Devices, And The Like (AREA)
Abstract
本发明涉及一种用于油田丛式井开发的丛式井互动自平衡机电一体化智能抽油机采油技术。该技术乃是基于“在丛式井平台上多口油井共用一台抽油机进行生产”的构思,采用一种应用相邻多口油井上、下行悬点载荷不同、悬点位置变化而产生的势能变化实现多井互动自平衡的抽油机对多口油井同时进行开采的工艺技术。利用该技术可以大幅度节约基建投资、能源消耗和管理维修费用,降低采油成本,提高经济效益,宜于推广应用。
Description
技术领域 本发明涉及一种用于油田丛式井开发的抽油机采油技术,属石油机械采油类。
背景技术 抽油机采油是油井生产过程应用最为广泛的主要开采方式。目前,现场采用的抽油机采油技术虽然类型繁多(例如游梁式、链条式、天轮式等),结构各异,但其共同之处则均为基于一口油井一台抽油机(即“一井一机”)的概念。近年来,随着丛式井技术的发展和油田开发进入中后期,油井数量大幅度上升,由于每口油井都要安装、使用一台抽油机,因而需要耗费数额较大的基建设备投资、能源消耗和管理维修费用及人力,使得采油成本增大,影响油田开发总体经济效益的提高。本发明的目的在于提供一种利用一套采油设备对相邻多口油井同时进行采油(即“一机多井”)、从而可以降低采油成本、提高经济效益的丛式井互动自平衡机电一体化智能抽油机采油技术。
发明内容 本发明的技术方案如下:本发明提供的采油技术乃是基于“多口油井共用一台抽油机”进行生产的构思,采用一种应用相邻多口油井上、下行悬点载荷不同、悬点位置变化而产生的势能变化实现丛式井互动自平衡的机电一体化智能抽油机对多口油井同时进行开采的工艺技术。所采用的丛式井互动自平衡机电一体化智能抽油机在整体外形和结构上可有所不同,有“T”形上置式、“T”形下置式、“Y”型、“V”形、“L”形等多种。丛式井互动自平衡机电一体化智能抽油机的结构设计为:它由机架、主动轮、导向轮、传动带、伸缩梁、井口对中调节丝杠、平衡轮、平衡重、控制柜以及由调速换向电机、制动器、减速器构成的动力机组组成,其组装关系如下:主动轮通过传动带与其导向轮相连接传动,导向轮通过传动带分别与油井的抽油杆相连接,平衡轮上通过传动带悬挂有平衡重;机架顶部设有伸缩梁和与之相配合的井口对中调节丝杠,该伸缩梁两端分别装有导向轮;机架底部上安装有以导线与调速换向电机连接的控制柜,电机、制动器、减速器、平衡轮、主动轮轴依次相连,构成动力机组,固定在机架上部或下部的平台上。其中,传动带可采用钢丝绳、链条、LJZ高强度绳索、复合非金属材料绳索、宽带、排绳、三角带、无纺布等各种软传动带状物。此种抽油机在总体设计构思、主要部件构成和工作原理相同的前提下,其整体外形和各部件位置结构可有所不同,包括“T”形上置式、“T”下置式、“Y”形、“V”形、“L”形等数种丛式井互动自平衡机电一体化智能抽油机,构成一个系列,供现场根据具体情况选用。
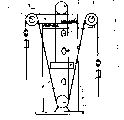
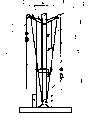
附图说明 图1为本发明提供的丛式井互动自平衡机电一体化智能抽油机设计原理示意图(由调速换向电机、制动器、减速器构成的动力机组及部分附件未画出)。图中,标号“12”为相邻油井井口装置。图2为丛式井“T”形上置式互动自平衡机电一体化智能抽油机结构示意图。图3为丛式井“T”形下置式互动自平衡机电一体化智能抽油机结构示意图。图4为丛式井“Y”形互动自平衡机电一体化智能抽油机结构示意图。图5为丛式井“V”形互动自平衡机电一体化智能抽油机结构示意图。图6为丛式井“L”形互动自平衡机电一体化智能抽油机结构示意图。以下结合附图对本发明加以说明。
如图1所示,本发明提供的丛式井井互动自平衡机电一体化智能抽油机由传动带1、导向轮2、伸缩梁3、井口对中调节丝杠4、换向器5、限位器6、主动轮7、平衡轮8、平衡导向轮9、平衡重10、控制柜11、机架13以及由调速换向电机、制动器、减速器构成的动力机组组成。其中,机架13呈直立式,整体上可制成近似于“T”形(见图2、图3)、“Y”形(见图4)、“V”形(见图5)、“L”形(见图6)等多种形状。
具体实施方式 丛式井互动自平衡机电一体化智能抽油机的使用及其工作过程:将此种抽油机安装在丛式井平台相邻油井之间或后侧,并通过传动带1将抽油机与油井抽油杆上部的光杆相连,即可投入工作。工作时,由控制柜11启动电机后,电机驱动减速器、减速器输出轴驱动主动轮7,通过传动带1,主动轮7带动导向轮2转动,传动带1带动油井的光杆交替作上、下运动,实现油井抽油的上冲程和下冲程。在此过程中,一部分油井下冲程的悬点载荷作为另一部分油井上冲程悬点载荷的平衡重,亦即将一部分油井下冲程悬点势能减小作为另一部分油井上冲程悬点势能增加的补充,以此实现互动自平衡。换向器5、限位器6和控制柜11组合在一起,形成整个抽油机系统机电一体化智能控制的核心,在抽油机上、下冲程中,主动轮7的正反转运动由根据油井产能、下泵深度确定的冲程、冲次设置在控制柜11内的控制系统来完成。在特殊工况下保证抽油机自平衡和油井正常生产的调整措施是:
(1)若油井的上、下悬点载荷差大于电机工作能力,可通过与主动轮7同轴的平衡轮8由传动带1带动一定重量的平衡重10,克服部分载荷差以满足油井同时采油的要求;
(2)若油井工况(如下泵深度、油井产量、原油性质等)相差较大,可采用比例配泵法或不同主动轮直径组合法,亦可两法兼用。比例配泵法即是根据不同的井况,在保证相同冲次和冲程情况下按比例搭配泵径;不同主动轮直径组合法则是根据不同井况,在保证泵冲次相同的情况下按比例调整不同的主动轮直径组合,实现冲程的变化,从而达到各井正常生产;
(3)其中一部分油井需要停产修井,可通过井口对中调整丝杠4调节伸缩梁3,使导向轮2缩回,给修井作业让出施工空间;当导向轮2缩回一定距离后,可采用附加平衡法亦即作业井一侧在传动带1下面挂上相应的平衡重10,使另一部分井保持正常生产。
本发明提供的丛式井互动自平衡机电一体化智能抽油机采油技术利用一台抽油机对丛式平台上的相邻多口油井同时进行采油,可以大幅度节约基建投资、能源消耗和管理维修费用,降低采油成本,提高经济效益,宜于推广应用。
Claims (4)
1、一种用于油田丛式井生产的丛式井互动自平衡机电一体化智能抽油机采油技术,其特征在于,该技术乃是基于“多口油井共用一台抽油机”进行生产的构思,采用一种应用相邻多口油井上、下行悬点载荷不同、悬点位置变化而产生的势能变化实现多井互动自平衡的抽油机对多口油井同时进行开采的工艺技术。
2、根据权利要求1所述的丛式井互动自平衡机电一体化智能抽油机采油技术,其特征在于丛式井互动自平衡机电一体化智能抽油机的结构设计为:该抽油机由传动带(1)、导向轮(2)、伸缩梁(3)、井口对中调节丝杠(4)、换向器(5)、限位器(6)、主动轮(7)、平衡轮(8)、平衡导向轮(9)、平衡重(10)、控制柜(11)、机架(13)以及由调速换向电机、制动器、减速器构成的动力机组组成,其组装关系如下:主动轮(7)通过传动带(1)与导向轮(2)相连接传动,导向轮(2)通过传动带(1)分别与油井的抽油杆相连接,平衡轮(8)上通过传动带(1)悬挂有平衡重(10);机架(13)上部设有伸缩梁(3)和与之相配合的井口对中调节丝杠(4),伸缩梁(3)外端分别装有导向轮(2);机架(13)底部上安装有以导线与调速换向电机连接的控制柜(11),电机、制动器、减速器、平衡轮(8)、主动轮(7)轴依次相连,构成动力机组,固定在机架(13)上部或下部的平台上;其中,传动带(1)可采用钢丝绳、链条、LJZ高强度绳索、复合排非金属材料绳索、宽带、排绳、三角带、无纺布等各种软传动带状物;此种抽油机在总体设计构思、主要部件构成和工作原理相同的前提下,其整体外形和各部件位置结构可有所不同,包括“T”形上置式、“T”形下置式、“Y”形、“V”形、“L”形等数种丛式井互动自平衡机电一体化智能抽油机,构成一个系列,供现场根据具体情况选用。
3、根据权利要求1所述的丛式井互动自平衡机电一体化智能抽油机采油技术,其特征在于丛式井互动自平衡机电一体化智能抽油机的使用及其工作过程是:将此种抽油机安装在丛式井平台相邻井之间或后侧,并通过传动带(1)将抽油机与油井抽油杆上部的光杆相连,即可投入工作;工作时,由控制柜(11)启动电机后,电机驱动减速器、减速器输出轴驱动主动轮(7),通过传动带(1),主动轮(7)带动导向轮(2)转动,传动带(1)带动油井的光杆交替作上、下运动,实现多口油井抽油的上冲程和下冲程;在此过程中,一部分油井下冲程的悬点载荷作为另一部分油井上冲程悬点载荷的平衡重,亦即将一部分油井下冲程悬点势能减小作为另一部分油井上冲程悬点势能增加的补充,以此实现互动自平衡;换向器(5)、限位器(6)和控制柜(11)组合在一起,形成该抽油机机电一体化控制的核心,在抽油机上、下冲程中,主动轮(7)的正反转运动由根据油井产能、下泵深度确定的冲程、冲次设置在控制柜(11)内的控制系统来完成。
4、根据权利要求1所述的丛式井互动自平衡机电一体化智能抽油机采油技术,其特征在于丛式井互动自平衡机电一体化智能抽油机在特殊工况下保证抽油机自平衡和油井正常生产的调整措施是:
(1)若油井的上、下悬点载荷差大于电机工作能力,可通过与主动轮(7)同轴的平衡轮(8)由传动带(1)带动一定重量的平衡重(10),克服部分载荷差,以满足多口油井同时采油的要求;
(2)若油井工况相差较大,可采用比例配泵法或不同主动轮直径组合法,亦可两法兼用;比例配泵法即是根据不同的井况,在保证相同冲次和冲程情况下按比例搭配泵径;不同主动轮直径组合法则是根据不同井况,在保证泵冲次相同的情况下按比例调整不同的主动轮(7)直径组合,实现冲程的变化,从而达到各井正常生产。
(3)若其中一部分油井需要停产修井,可通过井口对中调整丝杠(4)调节伸缩梁(3),使导向轮(2)缩回,给修井作业让出施工空间;当导向轮(2)缩回一定距离后,可采用附加平衡法亦即作业井一侧在传动带(1)下面挂上相应的平衡重,使另一部分井保持正常生产。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 02123953 CN1386955A (zh) | 2002-07-10 | 2002-07-10 | 丛式井互动自平衡机电一体化智能抽油机采油技术 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 02123953 CN1386955A (zh) | 2002-07-10 | 2002-07-10 | 丛式井互动自平衡机电一体化智能抽油机采油技术 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1386955A true CN1386955A (zh) | 2002-12-25 |
Family
ID=4745270
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 02123953 Pending CN1386955A (zh) | 2002-07-10 | 2002-07-10 | 丛式井互动自平衡机电一体化智能抽油机采油技术 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN1386955A (zh) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008071089A1 (fr) * | 2006-12-15 | 2008-06-19 | Gangdu Cui | Unité de pompage de double puits de pétrole par entraînement par traction |
| CN102080517A (zh) * | 2010-12-30 | 2011-06-01 | 金成群 | 一机多井抽油机 |
| CN102852484A (zh) * | 2011-06-29 | 2013-01-02 | 霍惠春 | 多驱动互平衡抽油机 |
| CN109779573A (zh) * | 2017-11-15 | 2019-05-21 | 李骥 | 平台井一体化采油装置 |
| CN110067536A (zh) * | 2018-01-22 | 2019-07-30 | 中国石油天然气股份有限公司 | 井丛场油井启动的控制方法 |
| CN111706301A (zh) * | 2020-07-13 | 2020-09-25 | 李文斌 | 一种两井一机自动换向液压抽油机及其控制系统 |
| CN114517662A (zh) * | 2022-02-28 | 2022-05-20 | 吕学民 | 一种联动互平衡立式超长冲程采油系统及方法 |
-
2002
- 2002-07-10 CN CN 02123953 patent/CN1386955A/zh active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008071089A1 (fr) * | 2006-12-15 | 2008-06-19 | Gangdu Cui | Unité de pompage de double puits de pétrole par entraînement par traction |
| CN102080517A (zh) * | 2010-12-30 | 2011-06-01 | 金成群 | 一机多井抽油机 |
| CN102852484A (zh) * | 2011-06-29 | 2013-01-02 | 霍惠春 | 多驱动互平衡抽油机 |
| CN109779573A (zh) * | 2017-11-15 | 2019-05-21 | 李骥 | 平台井一体化采油装置 |
| CN110067536A (zh) * | 2018-01-22 | 2019-07-30 | 中国石油天然气股份有限公司 | 井丛场油井启动的控制方法 |
| CN111706301A (zh) * | 2020-07-13 | 2020-09-25 | 李文斌 | 一种两井一机自动换向液压抽油机及其控制系统 |
| CN114517662A (zh) * | 2022-02-28 | 2022-05-20 | 吕学民 | 一种联动互平衡立式超长冲程采油系统及方法 |
| CN114517662B (zh) * | 2022-02-28 | 2024-05-14 | 梅河口市弘业无缝钢管有限公司 | 一种联动互平衡立式超长冲程采油系统及方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102155191A (zh) | 一种分体式双井抽油机 | |
| CN201021617Y (zh) | 稀土永磁无齿轮同步曳引双井抽油机 | |
| CN201865641U (zh) | 驱动上置型长冲程节能双井抽油机 | |
| CN1386955A (zh) | 丛式井互动自平衡机电一体化智能抽油机采油技术 | |
| CN204920914U (zh) | 顶部直驱型抽油机 | |
| CN201443365U (zh) | 动态平衡抽汲系统 | |
| CN101187304B (zh) | 一种高可靠性的双井抽油机 | |
| CN2575294Y (zh) | 丛式井“t”形下置式互动自平衡机电一体化智能抽油机 | |
| CN101392639B (zh) | 动态平衡抽汲系统 | |
| CN108798605B (zh) | 智能化控制数字液压抽油机 | |
| CN2412105Y (zh) | 直线电机驱动无游梁抽油机 | |
| CN201092849Y (zh) | 链条式双井抽油机 | |
| CN203626750U (zh) | 同步带式无游梁抽油机 | |
| CN2550498Y (zh) | 丛式井绳轮互动自平衡机电一体化智能抽油机 | |
| CN201531251U (zh) | 节能抽油机 | |
| CN1195148C (zh) | 丛式多井互动自平衡机电一体化智能抽油机 | |
| CN212479176U (zh) | 智能化控制数字液压抽油机 | |
| CN202064904U (zh) | 一种分体式双井抽油机 | |
| CN2545365Y (zh) | “l”形多井互动自平衡抽油机 | |
| CN2637718Y (zh) | 丛式井“t”形上置式互动自平衡机电一体化智能抽油机 | |
| CN201133237Y (zh) | 一种双井抽油机 | |
| CN2571998Y (zh) | 丛式井“y”形互动自平衡机电一体化智能抽油机 | |
| CN206722808U (zh) | 自平衡节能型卧式链条抽油机 | |
| CN2284867Y (zh) | 采用直线电机驱动的抽油机 | |
| CN2594459Y (zh) | 丛式井“v”形互动自平衡机电一体化智能抽油机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |