CN1273342C - 动力转向系统 - Google Patents
动力转向系统 Download PDFInfo
- Publication number
- CN1273342C CN1273342C CNB031409946A CN03140994A CN1273342C CN 1273342 C CN1273342 C CN 1273342C CN B031409946 A CNB031409946 A CN B031409946A CN 03140994 A CN03140994 A CN 03140994A CN 1273342 C CN1273342 C CN 1273342C
- Authority
- CN
- China
- Prior art keywords
- current instruction
- instruction value
- value
- control
- controller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/06—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle
- B62D5/065—Power-assisted or power-driven steering fluid, i.e. using a pressurised fluid for most or all the force required for steering a vehicle characterised by specially adapted means for varying pressurised fluid supply based on need, e.g. on-demand, variable assist
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D6/00—Arrangements for automatically controlling steering depending on driving conditions sensed and responded to, e.g. control circuits
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Power Steering Mechanism (AREA)
Abstract
动力转向系统能够在即使当输入的电流指示值急剧降低的时候也不让驾驶员感觉到不舒服。动力转向系统包括用于根据依据从转向角度传感器提供的转向角度的电流指示值(I1)、依据转向角速度的电流指示值(I2)和依据车辆速度的电流指示值来确定螺线管电流指示值(SI的控制器(C)。控制器(C)包括用于只有当输入的电流指示值急剧降低的时候才减少降低率并且输出所得结果的电流指示值的延迟控制部分。
Description
技术领域
本发明涉及包括用于防止能量损耗的流量控制阀的动力转向系统。
背景技术
在已经公开的由当前申请者提交的日本专利申请号NO.2001-260917(专利文件1)中公开了包括用于防止能量损耗的流量控制阀的动力转向系统的实例。
如图6中所示,先有技术实例的动力转向系统的流量控制阀V包括一个一端邻接伺服室2而另一端邻接伺服室3的阀柱1。
伺服室2通过泵孔4与泵P始终连通。伺服室2通过流动通道6、可变孔板a和流动通道7与为控制动力缸8而提供的转向阀9的流入口相连通。
伺服室3包括弹簧5并且还通过流动通道10和流动通道7与转向阀9的流入口相连通。因此,伺服室2和3通过可变控板a、流动通道7和流动通道10彼此相互连通。从可变孔板a向上游的压力作用在伺服室2上,而从那里向下游的压力作用在伺服室3上。通过用于螺线管SOL的螺线管电流指示值SI来控制可变孔板a的开度。
阀柱1保持在作用于伺服室2上的力、作用于伺服室3上的力和弹簧5的力相平衡的位置上。这个平衡位置决定了油箱口11的开度。
例如,在像发动机等这样的泵驱动源12的驱使下,驱动泵P将压力油供给到泵孔4以便于在可变孔板a中发生流动。这样的流动在可变孔板a的两端之间产生压差,压差导致了在伺服室2和3之间压力的不同。作为结果的压差抵消了弹簧5的力并且将阀柱1从如图6中图解说明的正常位置移动到平衡位置。
因此,从正常位置朝着平衡位置移动阀柱1增加了油箱口11的开度。依据由此得到的油箱口11的开度,确定在从泵P朝着转向阀9引入的控制流QP和循环到油箱T或者泵P的回流QT之间的分配率。换句话说,依据油箱口11的开度确定控制流QP。
依据油箱口11的开度进行的控制流QP的控制导致了依据可变孔板a的开度确定控制流QP。这是因为通过在两个伺服室2和3之间的不同压力来确定阀柱1所移动到的确定油箱口11的开度的位置,并且通过可变孔板a的开度来确定这个不同压力。
因此,为了依据车辆速度或者车辆的转向条件来控制控制流QP,可以控制可变孔板a的开度或者用于螺线管SOL的螺线管电流指示值SI。这是因为依据螺线管SOL的激发电流可以有选择地控制从最小值到最大值变化的可变孔板a的开度。
施加了控制流QP转向阀9依据方向盘(没有显示)的输入转矩(转向转矩)来控制供给到动力缸8的油量。例如,如果转向转矩很大,则增加转向阀9的移动量来增加供给到动力缸8的油量,反之如果很小,则减少转向阀9的移动量来减少供给到动力缸8的油量。压力油供给量越大,动力缸8施加的辅助力越大。供给量越小,动力缸8施加的辅助力越小。
可以通过扭力杆(没有显示)等的扭转反作用力来确定转向转矩和转向阀9的移动量。
如上所述,转向阀9控制提供给动力缸8的流体QM,流量控制阀V控制提供给转向阀9的控制流体QP。如果动力缸8所需的流体QM尽可能的接近由流量控制阀V确定的控制流体QP,则有可能减少泵P周围的能量损耗。这是因为在控制流QP和动力缸8所需的流体QM之间的差异导致了泵P周围的能量损耗。
为了使得控制流QP尽可能的接近动力缸8所需的流体QM来防止能量损耗,先有技术实例的系统控制可变孔板a的开度。如前所述通过应用于螺线管SOL的激发电流来确定可变孔板a的开度。将在下面详细描述的控制器C控制激发电流。
将控制器C连接到转向角度传感器14和车辆速度传感器15。如图7中所图解说明的,控制器C确定依据由转向角度传感器14检测的转向角度的电流指示值I1’,还确定依据通过微分被检测的转向角度所计算的转向角速度的电流指示值I2’。
根据将转向角度和电流指示值I1’之间的关系给定为线性特性的理论值,确定到转向角度和控制流QP之间的关系。还根据将转向角速度和控制流QP之间的关系给定为线性特性的理论值,确定转向角速度和电流指示值I2’之间的关系。电流指示值I1’和I2’输出为零除非转向角度和转向角速度都超出设定值。特别地,当方向盘被置于中心或者中心周围,则电流指示值I1’和I2’输出为零以便于设定中心周围的死区。
此外,控制器C输出基于由车辆速度传感器15检测的值的相关转向角度电流指示值I3’和相关转向角速度电流指示值I4’。
在低速车辆速度的时候相关转向角度电流指示值I3’输出为1,而例如在最高车辆速度的时候为0.6。在低速车辆速度的时候相关转向角速度电流指示值I4’输出为1,而例如在最高车辆速度的时候为0.8。特定地,关于在从低速车辆速度到最大车辆速度范围内的增益,被控制在1到0.6范围中的相关转向角度电流指示值I3’被设定为大于被控制在1到0.8范围中的相关转向角速度电流指示值I4’。
然后,用根据转向角度的电流指示值I1’乘以相关转向角度电流指示值I3’。因此,随着车辆速度的增加,由乘积产生的基于转向角度的电流指示值I5’变得更小了。另外,相关转向角度电流指示值I3’具有被设定为大于相关转向角速度电流指示值I4’的增益。因此车辆速度变得越快,电流指示值I5’的减小率变得越高。也就是说,在低速车辆速度中保持很高的响应而在高速车辆速度中降低响应。因此,响应根据车辆速度是可变的。这是因为在高速行进期间通常不需要很高的响应而在低速车辆速度的大多数情况下都是需要的。
控制器C将当作极限值的相关转向角速度电流指示值I4’应用于根据转向角速度的电流指示值I2’以便于输出基于转向角速度的电流指示值I6’。电流指示值I6’也依据车辆速度而减少。但是,相关转向角速度电流指示值I4’的增益小于相关转向角度电流指示值I3’的增益以便于电流指示值I6’的减少率小于电流指示值I5’的减小率。
依据车辆速度设定如上所述的极限值以便于主要防止在高速行进期间施加过度的辅助力。
控制器C在基于转向角度的电流指示值I5’和基于转向角速度的电流指示值I6’之间进行比较,并且采用两者中较大的值。
例如,在高速行进期间方向盘很少突然地被转动,因此基于转向角度的电流指示值I5’典型的大于基于转向角速度的电流指示值I6’。因此,在大多数情况下,在高速行进期间选择基于转向角度的电流指示值I5’。设定较大的电流指示值I5’的增益以便于提高在那时方向盘操作中的安全性和稳定性。换句话说,随着行进速度增加,增加降低控制流QP的比例用于增强行进中的安全性和稳定性。
另一方面,在以低速行进期间方向盘经常被突然转动以至于在许多情况中基于转向角速度的电流指示值I6’大于基于转向角度的电流指示值I5’。因此,在低速行进期间大多数情况下都选择基于转向角速度的电流指示值I6’。当转向角速度变大的时候,响应被认为是最重要的。
因此,在低速行进中,将转向角速度用作参考,设定较小的基于转向角速度的电流指示值I6’以便于提高方向盘的可操作性或者响应。换句话说,如果行进速度在某种程度上增加,则足够开度所确保的控制流QP使得有可能当突然转动方向盘的时候确保响应。
控制器C将待机流电流指示值I7’加上如上所述选择的电流指示值I5’或者I6’,并且将这样相加所得的结果值输出到驱动装置16’作为螺线管电流指示值SI。
因为待机电流指示值I7’的相加,即使当基于转向角度、转向角速度和车辆速度的全部电流指示值都是零的时候,螺线管电流指示值SI保持在预定的大小。为了这个原因,将预定的油流一直提供给转向阀9。就防止能量损失而言,当动力缸8和转向阀9所需求的流QM是零的时候在流量控制阀V中的控制流QP理想的变为零。特定地,将控制流QP降低到零意味着从泵P流出的总油量从油箱口11返回泵P或者油箱T。从油箱口11到泵P或者油箱T的油流通道在主体B中非常短,以至于几乎不产生压力损失。由于极低程度的压力损失,泵P的驱动转矩被减小到最小值,使得能量节约。在这篇文章中,关于防止能量损失,控制流QP具有当所需的流体QM是零的时候也被降低到零的优点。
尽管如此,即使当所需的流QM是零的时候也要维持待机流QS。这是因为:
防止系统中的滞塞。通过系统的待机流QS的循环能够起到冷却效应。
(2)确保响应。和不保持待机流QS的情况相比较,上述保持待机流QS使得减少了用于获得目标控制流QP所需的时间。所得到的时间差影响了响应。结果,待机流QS的保持导致了响应的改善。
(3)消除例如像反冲等这样的干扰和回位转矩。回位转矩或者干扰的反作用力作用在车轮上,然后作用在动力缸8的连杆上。如果不保持待机流,对回位转矩或者干扰的反作用力使得车轮不稳定。但是,保持待机流使得即使当上述反作用力作用在车轮上的时候也能防止车轮变得不稳定。特别地,动力缸8的连杆与用于转换转向阀9的齿轮等相啮合。在反作用力的作用的基础上,也能转换转向阀来在消除反作用力的方向上提供待机流。因此,保持待机流使得有可能消除回位转矩和由反冲导致的干扰。
接着,将给出先有技术实例的动力转向系统的操作的描述。
当车辆行进的时候,控制器C输出通过基于转向角度的螺线管电流指示值I1’与相关转向角度电流指示值I3’乘积所产生的基于转向角度的电流指示值I5’,也输出基于转向角速度的电流指示值I6’。通过将作为极限值的基于转向角速度的电流指示值I4’应用于根据转向角速度的螺线管电流指示值I2’来获得电流指示值I6’。
接着,比较基于转向角度的电流指示值I5’和基于转向角速度的电流指示值I6’来选出较大的值加到待机电流指示值I7’上的以便于确定这里的螺线管电流指示值SI。主要参考当车辆高速行进基于转向角度的电流指示值I5’和当车辆低速行进基于转向角速度的电流指示值I6’来确定螺线管电流指示值SI。
阀柱1具有在其前端形成的缝隙13。即使当阀柱1在如图6中所图解说明的正常位置中的时候,缝隙13使得伺服室2和可变孔板a之间相互连通。特别地,即使当阀柱1在正常位置中的时候,从泵孔4提供到伺服室2的压力油还通过缝隙13、流动通道6,可变孔板a和流动通道7提供到转向阀9。由于这样提供压力油,系统成功地实现了防止滞塞和例如反冲等这样的干扰和确保响应。
图6图解说明了用于驱动螺线管SOL而设定的并且连接到控制器C和螺线管SOL、节流阀17和18和安全阀19的一个驱动器16。
(专利文件1)
公开的日本专利申请的出版物No.2001-260917
(第3-7页,图1和图2)
在如上所述的先有技术的动力转向系统中,例如,如图8中所图解说明的,当驾驶员将方向盘旋转60度,然后返回到中心位置,然后再旋转60度的时候,基于转向角度和基于转向角速度的电流指示值I1’和I2’临时降低到零然后再增加。也就是说,电流指示值I1’和I2’在方向盘的中心位置周围形成V形线条,导致了值的剧烈变化。
当将这样剧烈变化的电流指示值I1’或者I2’输出作为螺线管电流指示值SI而不改变的时候,提供给转向阀9的控制流体也剧烈地变动。提供给转向阀9的控制流体的剧烈变化导致了使驾驶员在操作中感觉不舒服的问题。
此外,当在较高的转向角度处停止方向盘的时候,控制流不会剧烈波动因为依据转向角度来输出电流指示值。然而,当在较低的转向角度处停止方向盘的时候,控制流体剧烈地变化,导致使得驾驶员在操作中感觉不舒服的问题。
发明内容
本发明的目的是提供一个动力转向系统,即使输入电流指示值突然改变,也不会使驾驶员感觉不舒服。
依据本发明的动力转向系统具有第一个特征,包括:用于控制动力缸的转向阀;在转向阀上游提供的可变孔板;用于控制可变孔板的开度的螺线管;用于控制用于驱动螺线管的螺线管电流指示值SI的控制器;连接到控制器的转向角度传感器和车辆速度传感器;用于将从泵提供的流体分成依据可变孔板的开度而提供给转向阀的控制流体和循环回油箱或者泵的回流的流量控制阀,而且在第一个特征中,控制器根据依据从转向角度传感器提供的转向角度的电流指示值、依据转向角速度的电流指示值和依据车辆速度的电流指示值来确定螺线管电流指示值,并且包括用于只有当输入电流指示值突然降低的时候才减少降低率并且输出所得结果的电流指示值的延迟控制部分。
依据本发明的动力转向系统具有第二个特征,包括:用于控制动力缸的转向阀;在转向阀上游提供的可变孔板;用于控制可变孔板的开度的螺线管;用于控制用于驱动螺线管的螺线管电流指示值SI的控制器;连接到控制器的转向转矩传感器和车辆速度传感器;用于将从泵提供的流体分成依据可变孔板的开度而提供给转向阀的控制流体和循环回油箱或者泵的回流的流量控制阀,而且在第二个特征中,控制器根据依据由转向转矩传感器检测的转向转矩的电流指示值和依据通过车辆速度传感器检测的车辆速度的电流指示值来确定螺线管电流指示值,并且包括用于只有当输入电流指示值突然降低的时候才减少降低率并且输出所得结果的电流指示值的延迟控制部分。
依据第一和第二个特征,执行延迟控制用于即使当输入电流指示值剧烈降低的时候也能防止电流指示值的突然改变,使得防止在操作中驾驶员的不舒适。
附图说明
图1是图解说明在第一个实施例中控制器C的控制系统的图。
图2是显示用于基于转向角度的电流指示值的延迟控制部分的过程的流程图。
图3是显示在受到延迟控制的电流指示值的改变的图。
图4是图解说明在第二个实施例中控制器C的控制系统的图。
图5是图解说明在第三个实施例中控制器C的控制系统的图。
图6是在先有技术中的动力转向的总图。
图7是图解说明在先有技术中控制器C的控制系统的图。
图8是显示当操作的时候电流指示值改变的图。
具体实施方式
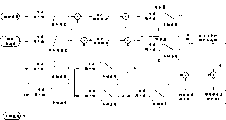
图1图解说明依据本发明的第一个实施例的控制器C的控制系统。在第一个实施例的情况中,除了控制器C之外,动力转向系统具有与在图6中已经先期描述的先有技术实例相同的构造,包括如图6中所示的流量控制阀V、动力缸8、转向阀9等,现在将只给出控制器C的控制系统的描述。如图1中所图解说明的,控制器C确定基于由转向角度传感器14检测的转向角度的电流指示值I1和基于由通过转向角度的微分而获得的转向角速度的电流指示值I2。注意到可以附加安装转向角速度传感器,以便于控制器C能够确定基于由转向角速度传感器检测的转向角速度的电流指示值I2。
根据将转向角度和控制流QP之间的关系给定为线性特性的理论值来确定转向角度和电流指示值I1之间的关系。也可以根据将转向角速度和控制流QP之间的关系给定为线性特性的理论值来确定转向角速度和电流指示值I2之间的关系。
控制器C基于车辆速度传感器15的检测值输出相关转向角度电流指示值I3和相关转向角速度电流指示值I4。当车辆速度是零或者是非常低的速度的时候电流指示值I3变得更小,当车辆速度比固定速度更快的时候值I3输出为1。当车辆速度是零或者非常低的速度的时候电流指示值I4输出大于1,当车辆速度超过固定速度的时候将其输出为1。控制器C将基于转向角度的电流指示值I1与电流指示值I3相乘,还将基于转向角速度的电流指示值I2与电流指示值I4相乘。
执行电流指示值I1与基于车辆速度的电流指示值I3的乘积以便于防止当车辆停止的时候或者当以非常低的速度驱动车辆的时候转动方向盘的能量损失。例如,当把车辆开进车库的时候,经常是运转发动机并转动方向盘来停车。即使在这种情况中,输出依据转向角度而确定的电流指示值I1作为螺线管电流指示值SI,以至于将多余的流体提供到转向阀9。为了防止这种情况中的能量损失,当车辆速度是零或者非常低的速度的时候,乘上电流指示值I3以便于降低基于转向角度的电流指示值I1。
然而,如果如上所述电流指示值I3被降低,则当驾驶员开始转动保持在已经转动位置中的方向盘的时候,方向盘的响应变得更差。为了这个原因,当车辆速度是零或者非常低的时候,控制器C将基于转向角速度的电流指示值I2与作为较大值输出的电流指示值I4相乘用于确保足够的响应。
在电流指示值I1和I2分别乘上基于车辆速度的电流指示值I3和I4以后,延迟控制部分在通过乘积获得的值(I1×I3)和(I2×I4)上执行延迟控制。
在这里通过采用转向角度的事例作为例子来描述延迟控制。如图2中所示,假设输入电流指示值是x而被输出的电流指示值是y,延迟控制部分在步骤1中确定新的输入值x是否大于最后输出的值y。如果大于,则过程进行到步骤6来用输入值x代替新的输出值y并且输出所得结果的输出值y。如果输入值x小于最后的输出值y,则过程进行到步骤2来确定输入值x是否等于最后的输出值y。如果相等,则将输入值x直接输出作为输出值y。如果不等于最后的输出值y,则过程进行到步骤3。
控制部分从最后的输出值y中减去固定值α并且在步骤3中将所得结果值y-α确定为新的输出值y。在步骤4中,延迟控制部分确定新的输出值y是否小于输入值x。如果大于输入值x,则延迟控制部分输出新的输出值y。如果小于输入值x,则延迟控制部分输出输入值x作为新的输出值y。
简而言之,当减小输入值x以至于小于最后的输出值y的时候,如果减小量小于设定值α,则延迟控制部分输出输入值x而不加改变。但是,如果减小量超过设定值α,则延迟控制部分输出通过从最后的输出值y中减去设定值α而产生的值。
对于延迟控制,如图3中所图解说明的,即使当方向盘旋转60度,然后返回中心位置,然后再旋转60度,被输出的电流指示值的降低率能够很小。
即使当输入的电流指示值剧烈降低的时候,减小降低率能够防止被输出的电流指示值中突然的波动,使得防止引起驾驶员的不舒服。
用与基于转向角度的电流指示值相同的方式在基于转向角速度的电流指示值上执行延迟控制。
在完成延迟控制以后,控制器C将所得结果的电流指示值与根据车辆速度而设定的相应的电流指示值I5、I6相乘。每个电流指示值I5、I6在低速车辆速度的时候被输出为1,在最大车辆速度的时候输出为小于1的小数值。因此,控制器C在低速车辆速度的时候输出输入值而不用改变,而随着车辆速度的增加输出被降低的值。换句话说,在低速车辆速度的时候保持较高的响应而在高速车辆速度的时候降低响应。用于依据车辆速度改变响应的原因是因为在高速行进中通常不太需要较高的响应,然而在低速车辆速度的大多数情况下都需要较高的响应。
控制器C将作为极限值的根据车辆速度而设定的电流指示值I7、I8应用于在乘积以后相应的电流指示值上。特别的,如果乘积所得的结果值此时超过根据车辆速度的相应的电流指示值I7、I8,则除去超出的数量用于输出低于它们各自极限值的电流指示值。设定基于车辆速度的极限值以便于防止在高速行进期间施加过度的助力。
尽管也可以依据车辆速度来减少电流指示值I7和I8,但是设定它们的增益以便于小于电流指示值I5、I6的增益。
接着,控制器在已经被降低到极限值以下的基于转向角度的电流指示值和基于转向角速度的电流指示值之间进行比较,选择较大的电流指示值用作基本电流指示值Id。
在获得基本电流指示值Id以后,控制器C将待机电流指示值IS与基本电流指示值Id相加。在这种情况中,不直接加上待机电流指示值IS,而是在相加以前将其乘上根据车辆速度而设定的电流指示值I9。
基于车辆速度的电流指示值I9在较低的车辆速度范围中输出为1,随着车辆速度的增加,在中等车辆速度范围中被逐渐降低,并且在较高的车辆速度范围中被保持在最低水平。因此,在较低车辆速度中输出由基于车辆速度的电流指示值I9与待机电流指示值IS的乘积产生的值而不用改变,然后在从中速朝着高速的车辆速度中被逐渐降低,然后在较高车辆速度中被输出为最低水平。
在高速车辆速度中降低待机电流指示值允许防止在高速车辆速度中待机流的不必要的使用。
即使在高速车辆速度中,也不能将控制器C设计成输出零作为由电流指示值I9与电流指示值Is的乘积所产生的值。
在完成如前述待机电流指示值(IS×I9)与基本电流指示值相加以后,控制器C将所得的结果值输出到驱动装置16(见图6)作为螺线管电流指示值SI。驱动装置16将相应于螺线管电流指示值SI的激发电流输出到螺线管SOL。
第一个实施例具有这样的结构,即包括了被单独提供用于在作为增益的电流指示值I5、I6相乘以后立即将作为极限值的电流指示值I7、I8应用到相应的结果值上的限制器。然而,代替单独的限制器,可以提供全面的限制器用于将作为极限值的基于车辆速度的电流指示值应用到由待机电流指示值相加所产生的值上。
此外,在第一个实施例中,在执行延迟控制以后分别乘上基于车辆速度的电流指示值I5、I6作为增益。然而,代替各自的增益乘积,可以用基于车辆速度的电流指示值乘上在值比较中被选择的值作为全面增益。
更进一步,可以提供一个全面的限制器用来将作为极限值的基于车辆速度的电流指示值应用于由待机电流指示值相加所产生的值上,还可以用基于车辆速度的电流指示值乘上由值比较所选出的值来作为全面的增益。
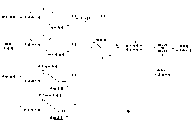
图4图解说明第二个实施例,在其中代替在第一个实施例中的确定基于转向角度和基于转向角速度的电流指示值之间的大小,将这些电流指示值彼此相加。其他结构与第一个实施例中的结构相同。
如上所述基于转向角度的电流指示值和基于转向角速度的电流指示值的相加,提供了包括基于转向角度特性和基于转向角速度特性的螺线管电流指示值SI。
如在第一个实施例的情况中,在第二个实施例中也执行延迟控制,用于即使当输入的电流指示值剧烈降低的时候也能防止被输出的电流指示值中突然的波动。因此有可能避免使得驾驶员在操作中感到不舒适。
与第一个实施例类似,在第二个实施例中,还可以单独提供限制器用于将作为极限值的电流指示值I7、I8应用到在作为增益的电流指示值I5、I6的乘积之后生成的结果值上。然而,代替单个的限制器,可以提供一个全面限制器用于将作为极限值的基于车辆速度的电流指示值应用到待机电流指示值相加的结果值上。
此外,代替增益的个别相乘,在乘积操作中可以用基于车辆速度的电流指示值来作为全面增益。
更进一步,可以提供一个全面的限制器用于将作为极限值的基于车辆速度的电流指示值应用在由待机电流指示值相加而产生的值上,而且在上述的乘积操作中还可以用基于车辆速度的电流指示值来作为全面增益。
图5图解说明使用转向转矩来计算基本电流指示值Id的第三个实施例。在第三个实施例中,控制器C与用于检测转向转矩的转向转矩传感器相连接,并且根据依据被检测的转向转矩的电流指示值It和基于车辆速度的电流指示值Iv来计算基本电流指示值Id。特别的,控制器C在基于转向转矩的电流指示值It上执行延迟控制,然后将受到延迟控制的电流指示值与基于车辆速度的电流指示值Iv相乘来获得基本电流指示值Id,然后将待机电流指示值Is与基本电流指示值Id相加。在第三个实施例中,还用待机电流指示值Is乘上基于车辆速度的电流指示值I9。
如上所述,第三个实施例在基于转向转矩的电流指示值It上执行延迟控制。即使当输入的电流指示值急剧降低的时候,有可能适当地降低输出值,使得避免引起驾驶员的不舒适。
在第一到第三个实施例中,控制器C控制在流量控制阀V中可变孔板a的开度来消除在控制流QP中多余流体的生成。如图6中所图解说明的,通过调整油箱口11的开度来控制控制流QP,也就是说,将从泵P流出的多余的油流通过油箱口11循环回油箱T来调整控制流QP。用于将从泵P流出的油引入油箱口11的流动通道位于主体B内部所以其长度足够小以至于在用于循环的流动通道中不产生压力损失。不产生压力损失意味着可以忽略油温的增加。
第一到第三个实施例具有一个结构,在其中流量控制阀V将除了控制流QP以外的油流通过油箱口11循环回油箱T,产生了使油温增加最小的优点。
Claims (2)
1.一种动力转向系统,包括:
用于控制动力缸的转向阀;
在转向阀上游设置的可变孔板;
用于控制可变孔板的开度的螺线管;
用于控制用来驱动螺线管的螺线管电流指示值(SI)的控制器;
被连接到控制器的转向角度传感器和车辆速度传感器;和
将从泵提供的流体分配成依据可变孔板开度而提供给转向阀的控制流和循环回油箱或者泵的回流的流量控制阀,
上述控制器根据依据从上述转向角度传感器提供的转向角度的电流指示值、依据转向角速度的电流指示值和依据车辆速度的电流指示值来确定螺线管电流指示值,
其特征在于:上述控制器包括用于只有当输入的电流指示值突然降低的时候减小降低率并且输出所得结果的电流指示值的延迟控制部分。
2.一种动力转向系统,包括:
用于控制动力缸的转向阀;
在转向阀上游设置的可变孔板;
用于控制可变孔板的开度的螺线管;
用于控制用来驱动螺线管的螺线管电流指示值(SI)的控制器;
被连接到控制器的转向扭矩传感器和车辆速度传感器;和
将从泵提供的流体分配成依据可变孔板开度而提供给转向阀的控制流和循环回油箱或者泵的回流的流量控制阀,
上述控制器根据依据通过上述转向转矩传感器检测的转向转矩的电流指示值和依据通过车辆速度传感器检测的车辆速度的电流指示值来确定螺线管电流指示值,
其特征在于:上述控制器包括用于只有当输入的电流指示值突然降低的时候减小降低率并且输出所得结果的电流指示值的延迟控制部分。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP16505/2002 | 2002-01-25 | ||
| JP16505/02 | 2002-01-25 | ||
| JP2002016505 | 2002-01-25 | ||
| JP327756/2002 | 2002-11-12 | ||
| JP2002327756A JP2003285749A (ja) | 2002-01-25 | 2002-11-12 | パワーステアリング装置 |
| JP327756/02 | 2002-11-12 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1454808A CN1454808A (zh) | 2003-11-12 |
| CN1273342C true CN1273342C (zh) | 2006-09-06 |
Family
ID=26625632
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB031409946A Expired - Fee Related CN1273342C (zh) | 2002-01-25 | 2003-01-25 | 动力转向系统 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US6856870B2 (zh) |
| EP (1) | EP1331157B1 (zh) |
| JP (1) | JP2003285749A (zh) |
| KR (1) | KR100573459B1 (zh) |
| CN (1) | CN1273342C (zh) |
| AT (1) | ATE420806T1 (zh) |
| DE (1) | DE60325793D1 (zh) |
| ES (1) | ES2321496T3 (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3712387B2 (ja) * | 2002-01-25 | 2005-11-02 | カヤバ工業株式会社 | パワーステアリング装置 |
| JP2003285749A (ja) * | 2002-01-25 | 2003-10-07 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| KR101225936B1 (ko) * | 2003-12-04 | 2013-01-24 | 콘티넨탈 테베스 아게 운트 코. 오하게 | 차량 안정화를 위해 자동차 서버를 보조하는 방법 및 장치 |
| JP4500604B2 (ja) | 2004-07-05 | 2010-07-14 | カヤバ工業株式会社 | パワーステアリング装置 |
| KR100843393B1 (ko) * | 2006-04-12 | 2008-07-03 | 한국델파이주식회사 | 속도 감응 파워 스티어링 시스템 컨트롤러의 차속 가감에따른 전류의 가감 방법 |
| US7624836B2 (en) * | 2006-10-30 | 2009-12-01 | Caterpillar Inc. | Steering system having multiple strategies and variable deadzone |
| CN101618733B (zh) * | 2009-08-06 | 2011-05-04 | 上海交通大学 | 汽车前后轮主动转向控制系统 |
| JP5787164B2 (ja) * | 2011-11-24 | 2015-09-30 | 株式会社ジェイテクト | 油圧式パワーステアリング装置 |
| JP6365866B2 (ja) * | 2013-11-22 | 2018-08-01 | 株式会社ジェイテクト | パワーステアリング装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6167334A (en) * | 1999-01-05 | 2000-12-26 | Ford Global Technologies, Inc. | Method and apparatus for providing variable assist power steering |
| DE60004767T2 (de) * | 1999-12-13 | 2004-06-17 | Kayaba Industry Co., Ltd. | Servolenkung |
| JP3524463B2 (ja) | 2000-03-16 | 2004-05-10 | カヤバ工業株式会社 | パワーステアリング装置 |
| JP3712387B2 (ja) * | 2002-01-25 | 2005-11-02 | カヤバ工業株式会社 | パワーステアリング装置 |
| JP2003285749A (ja) * | 2002-01-25 | 2003-10-07 | Kayaba Ind Co Ltd | パワーステアリング装置 |
| JP3689046B2 (ja) * | 2002-01-25 | 2005-08-31 | カヤバ工業株式会社 | パワーステアリング装置 |
| US6802951B2 (en) * | 2002-01-28 | 2004-10-12 | Medtronic, Inc. | Methods of anodizing valve metal anodes |
-
2002
- 2002-11-12 JP JP2002327756A patent/JP2003285749A/ja active Pending
-
2003
- 2003-01-16 KR KR1020030002846A patent/KR100573459B1/ko not_active IP Right Cessation
- 2003-01-22 DE DE60325793T patent/DE60325793D1/de not_active Expired - Lifetime
- 2003-01-22 ES ES03250396T patent/ES2321496T3/es not_active Expired - Lifetime
- 2003-01-22 AT AT03250396T patent/ATE420806T1/de not_active IP Right Cessation
- 2003-01-22 EP EP03250396A patent/EP1331157B1/en not_active Expired - Lifetime
- 2003-01-24 US US10/351,133 patent/US6856870B2/en not_active Expired - Fee Related
- 2003-01-25 CN CNB031409946A patent/CN1273342C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP1331157B1 (en) | 2009-01-14 |
| JP2003285749A (ja) | 2003-10-07 |
| US6856870B2 (en) | 2005-02-15 |
| ATE420806T1 (de) | 2009-01-15 |
| KR20030064286A (ko) | 2003-07-31 |
| CN1454808A (zh) | 2003-11-12 |
| EP1331157A2 (en) | 2003-07-30 |
| EP1331157A3 (en) | 2005-03-30 |
| US20030144781A1 (en) | 2003-07-31 |
| ES2321496T3 (es) | 2009-06-08 |
| KR100573459B1 (ko) | 2006-04-24 |
| DE60325793D1 (de) | 2009-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1273343C (zh) | 动力转向系统 | |
| CN1273342C (zh) | 动力转向系统 | |
| CN1252392C (zh) | 液压泵控制器 | |
| CN1306606A (zh) | 泵容量控制装置和阀装置 | |
| CN105196824B (zh) | 用于车辆的主动悬挂设备和该主动悬挂设备的泵 | |
| JP2000193074A (ja) | ベルト式無段変速機の制御装置 | |
| CN1281451C (zh) | 动力转向系统 | |
| CN1651665A (zh) | 挖掘机全功率控制系统及方法 | |
| CN101788052B (zh) | 电机驱动cvt电液控制系统 | |
| CN201588926U (zh) | 电机驱动无级变速器电液控制系统 | |
| CN1454810A (zh) | 动力转向系统 | |
| CN105604996A (zh) | 负载敏感控制系统、控制方法及液压系统 | |
| US8561752B1 (en) | Power steering systems and methods | |
| CN101479508A (zh) | 控制传动比的方法 | |
| JP7456695B2 (ja) | 油圧アクティブサスペンションの流量制御システム | |
| CN115573959A (zh) | 用于全地形车的多泵多马达液压驱动系统及控制方法 | |
| EP1114764A2 (en) | Control method and apparatus for an electro-hydraulic power assisted steering system | |
| CN108466932B (zh) | 底盘取力行车液压调速系统 | |
| CN106351901B (zh) | 一种阻尼网络与两级滑阀组成的恒流量控制阀 | |
| CN218347663U (zh) | 一种同心结构压力可调式负反馈液压调速阀 | |
| CN219865674U (zh) | 一种浓缩机及其耙架驱动液压马达的液压控制系统 | |
| CN210422915U (zh) | 一种配置变速前置泵的给水泵系统 | |
| CN115033040B (zh) | 压路机转场行走控制方法及其控制系统 | |
| CN106882264A (zh) | 一种电控变流量转向助力系统 | |
| SU1046504A1 (ru) | Система автоматического управлени подачей исполнительного органа горной машины на забой |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20060906 Termination date: 20140125 |