CN1217503C - 无导频辅助的正交频分复用全数字同步跟踪方法及系统 - Google Patents
无导频辅助的正交频分复用全数字同步跟踪方法及系统 Download PDFInfo
- Publication number
- CN1217503C CN1217503C CN 03124223 CN03124223A CN1217503C CN 1217503 C CN1217503 C CN 1217503C CN 03124223 CN03124223 CN 03124223 CN 03124223 A CN03124223 A CN 03124223A CN 1217503 C CN1217503 C CN 1217503C
- Authority
- CN
- China
- Prior art keywords
- output
- symbol
- input
- subcarrier
- error
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



Abstract
无导频辅助的正交频分复用全数字同步跟踪方法及系统,属于宽带多载波无线传输技术领域。其特征在于:它是一种运算量小、实现简单的无导频辅助时频二维环路跟踪方法。时域环路是对一个正交频分复用(OFDM)符号中误差估计器(FED)输出的所有估计相差进行平均,得到的估计相差在快速傅立叶变换(FFT)之前对下一个OFDM符号的相位均值进行调整;频域环路采用逐点(或间隔)跟踪,对一个子载波数据符号进行相差估计后,对下一个子载波数据符号进行相位调整。相应地提出了一个适用于分组数据通信的无导频辅助OFDM同步跟踪系统。与一般导频辅助方法相比,它提高了频带利用率,极大降低了算法的实现难度,简化了系统结构。
Description
技术领域
本发明涉及一项无导频辅助的正交频分复用(OFDM)全数字同步环路跟踪方法和系统,属于无线通信技术的宽带多载波传输技术领域。
背景技术
OFDM作为一种高效的宽带多载波传输技术,其优势在于较高的频带利用率、出色的抗多径能力以及适合于高速数据传输。其核心思想是将低速率信号,使用不同载波频率,在同一个宽带信道中进行并行传输,从而提高传输速率。但是,相比于单载波系统,OFDM系统每个子信道的带宽窄,各子载波需保持严格正交,因而其对系统的同步性能非常敏感。要求系统实现非常精确的载波同步。
目前,已有的OFDM信号同步方法主要是根据不同的协议规范,根据提供的已知数据(时域训练序列和频域导频)或无辅助数据的条件下进行。同步过程一般被分为两个阶段,即时域内进行的捕获(Acquisition)和频域内进行的跟踪(Tracking)。在捕获阶段,由于有些协议没有提供时域训练序列,相应的系统中都采用无数据辅助的同步捕获方法,提供时域训练序列的,则采用数据辅助的同步捕获方法。但是,在跟踪阶段,由于没有运算量小、软硬件实现简单的无数据辅助同步跟踪方法,几乎所有的实用算法都是利用频域导频进行频差的跟踪。
利用频域导频进行同步跟踪的方法,其误差提取精度受到插入导频数目的限制。另一方面,增加插入导频数目,将极大影响OFDM频带利用率。因此,如果能够寻找一种运算量小、实现结构简单的无导频辅助同步跟踪方法,使每个子载波都携带有效数据符号,利用子载波上各数据符号的信号特征进行频差跟踪,将大大提高OFDM频带利用率和信号的抗噪声能力。
发明内容
本发明的目的在于提供一种无导频辅助的正交频分复用(OFDM)全数字同步环路跟踪方法及系统。它克服了现有导频辅助同步跟踪方法的缺点,仅利用子载波上的数据符号进行频差的跟踪,并使跟踪环路适应不同星座映射方式,从而达到提高频带利用率和简化实现结构的目的。适用于带有突发性质的分组数据通信。
本发明的技术方案是这样实现的。经过同步捕获阶段,由于收发信机载波频率不一致而造成的载波频差大部分已经消除,但是仍存在残余载波频差,造成累积增长的相位误差;另一方面,由于采样时钟频率不一致造成采样时钟频差导致的码元定时误差,在其较小时,也等价于累积增长的相位误差。因此,接收到的每个OFDM符号(OFDM symbol)都受到不同的相位误差的影响。其中,载波频率误差导致每个OFDM符号中的所有子载波产生相同的相位偏转,而码元定时误差则导致OFDM符号中各个子载波产生线性增长的相位偏转。从频域上看,每个载波上的相位旋转随子载波标号呈线性增长趋势,其步长与采样时钟频差成正比;从时域上看,固定位置上的前后子载波的相位旋转随时间呈线性增长趋势,其步长与载波频差成正比。因此,根据子载波的这种旋转特性,对相位旋转的纠正可以通过在频域FFT输出的旋转完成。这种方式的好处是复杂度降低、不需要回馈到FFT之前,误差纠正单元通过对每个载波做一个简单的复数相乘就可以实现。
但是,频差不仅造成星座点相位的旋转,同时也产生子载波间干扰(ICI),其等价于方差与频差的平方成正比、与载波间隔的平方成反比的附加白噪声,造成星座点的模糊。在频差较大或高进制星座点调制时,需要消除ICI的影响,残留频差的消除要在时域内进行。
本发明所述的无导频辅助的OFDM全数字同步环路跟踪方法,其特征在于:它是一种运算量小、实现简单、频带利用率高的时频二维环路跟踪方法。利用每个子载波上各数据符号的信号特征进行频差跟踪,时域环路对一个OFDM符号中误差估计器(FED)输出的所有估计相差在累加平均器中进行平均,得到的估计相差在快速傅立叶变换(FFT)之前对下一个OFDM符号的相位均值进行调整。频域环路采用逐点跟踪,对一个子载波数据符号进行相差估计后,对下一个子载波数据符号进行相位调整。它包括以下步骤:
(1)对当前OFDM符号的N个时域样点进行相位纠正:上述时域估计相差φl取整后作为正/余弦表的偏移地址,该偏移地址和起始地址共同构成查表地址输入正/余弦表,将正/余弦表的输出与当前OFDM符号的第一个样点数据复数相乘。然后,偏移地址累加为新的查表地址输入正/余弦表,将正/余弦表的输出与当前OFDM符号的第二个样点数据复数相乘。依次类推,直到所有N个样点完成上述相位纠正;
(2)对当前OFDM符号的N个样点做N点FFT运算,并/串转换后输出;
(3)对串行输出的N个子载波数据符号逐个进行载波相位纠正:将频域环路滤波器的输出θk取整作为正/余弦表的查表地址输入到正/余弦表,将正/余弦表的输出与当前第k个子载波数据符号复数相乘。然后,对该子载波解映射后输出有效比特;
(4)提取误差增量e():利用下述通用环误差提取算法计算误差增量e()。并将其分别输出到频域环路滤波器和累加平均器。
e()=ekI·sgn(bk)-ekQ·sgn(ak)
其中,ekI=ak-Ik,ekQ=bk-Qk,ak和bk分别是FFT输出的第k个子载波上数据符号的实部和虚部,Ik和Qk则对应该子载波正确星座点的实部和虚部。
(5)返回步骤(3),完成所有N个子载波数据符号相位纠正为止。
(6)累加平均器输出一次,其结果输入时域环路滤波器。
(7)返回步骤(1),输入下一个OFDM符号。
依照该方法,可采用简化误差提取算法。其特征在于:在上述步骤(4)中,采用适用于多进制正交幅度调制(MQAM)的简化定点算法:ekI=(ak mod 2)-1,ekQ=(bk mod 2)-1。
依照该方法,本发明提供一种OFDM全数字同步环路跟踪系统,其特征在于:仅利用子载波上的数据符号进行频差的跟踪,并使跟踪环路适应不同星座映射方式,系统软硬件结构简单,实现复杂度很低,易于在现场可编程逻辑阵列(FPGA)的硬件系统或数字信号处理器(DSP)的软件系统中实现。它包含:
时域复数乘法器:输入端与输入寄存器的输出端相连;
依次串接的串并转换器、N点FFT变换器和并串转换器:其中串并转换器的输入端与时域复数乘法器的输出端相连;
频域复数乘法器:输入端与上述并串转换器的输出端相连,输出信号经解映射后转换成串行输出的原始码流;
误差估计器:输入端与频域复数乘法器的输出端相连;
数据存储器:存储正/余弦表数据,数据输出端分别与时域复数乘法器和频域复数乘法器相连;
依次串接的实数乘法器K1、θk累加器和移位寄存器,其中,实数乘法器K1输入端与误差估计器输出端相连,移位寄存器输出端与上述数据存储器地址线相连;
依次串接的实数乘法器K2、φl累加器、移位寄存器和地址累加器,其中,实数乘法器K2输入端与误差估计器输出端相连,地址累加器输出端与上述数据存储器地址线相连;
时钟电路:分别向各个累加器、输入寄存器等提供时钟或N分频的时钟;
在上述系统的误差估计器中,包括以下部分:
误差信号ek实部/虚部判决器:输入端分别与并串转换器的实部/虚部输出端相连,判决输入信号的原始星座点并输出;
误差信号ek实部/虚部符号判决器:输入端分别与并串转换器的实部/虚部输出端相连,判决输入信号的符号并输出;
减法器:一个输入端为实部/虚部判决器的输出,另一个输入端为并串转换器的实部/虚部输出;
条件取反器:条件输入端为符号判决器的输出,数据输入端为减法器输出;
输出端减法器:两个输入端分别为两个条件取反器的输出。
在所述系统中,误差估计器、实数乘法器K1、θk累加器、移位寄存器、共用的数据存储器和频域复数乘法器组成频域同步跟踪环路;误差估计器、实数乘法器K2、φl累加器、移位寄存器、地址累加器、共用的数据存储器和时域复数乘法器组成时域同步跟踪环路。
通过软件仿真和实际系统验证表明:除在极低信噪比下,本发明对载波频偏的跟踪精度劣于导频辅助方法;其他情况下,其跟踪精度明显优于导频辅助方法,与无频偏时系统误码率相近。
附图说明
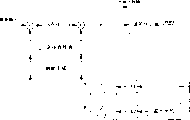
图1OFDM时频二维同步跟踪原理框图。
图2在FPGA中实现OFDM时频二维同步跟踪硬件的电路原理框图,
(a)硬件系统电路原理框图,
(b)误差估计器电路原理框图。
图3在DSP芯片TMS320C6701中实现本发明的完整程序流程框图。
图4本发明方法与传统导频辅助方法的性能比较曲线。
图5本发明系统处理前后16QAM星座点比较,
(a)实际信道数据原始星座点图,
(b)经本系统同步跟踪恢复后的星座点图。
具体实施方式
本发明设计了一个时频二维的环路跟踪方法,从时间和频率两个方向来跟踪频率偏差。见图1。时域跟踪环路输出放置到FFT(快速傅立叶变换)之前,频域跟踪环路输出放置到FFT之后。FFT点数为N。
该方法具体说明如下:频域误差纠正和时域误差纠正都包括复数乘法器和正/余弦查找表。正/余弦查找表可以共用,事先放置在数据存储器中。在时域误差纠正中,时域误差估计环路的估计相差φl只在第l个OFDM符号到来时输出,并保持到下一个OFDM符号,FFT输入端的时域样点按照该相差依次累计旋转,即附加旋转因子依次为1,ejφl,ej2φl,…,ej(N-1)φl。在频域误差纠正中,频域误差估计环路的估计相差θk在第k(k=0,1,…,N-1)个子载波输出,FFT输出端的子载波按照该相差进行相位旋转,旋转因子为ejθk,得到已纠正数据符号(datasymbol)。这些数据符号提取有效比特位(解映射)后即可串行输出原始码流。同时,已纠正数据符号用来进行相位误差估计,误差估计单元(FED)生成的误差增量e()分别输入时域环路和频域环路。在时域环路中,误差增量e()首先输出到累加平均器进行N点平均,平均后进入环路滤波器
 在频域环路中,误差增量e()直接进入环路滤波器
在频域环路中,误差增量e()直接进入环路滤波器
 概括的说,频域环路采用逐点跟踪,对一个子载波数据符号进行相差估计后,对下一个子载波数据符号进行相位调整;而时域环路则对一个OFDM符号中FED输出的所有估计相差在累加平均器中进行平均,对下一个OFDM符号的相位均值进行调整。
概括的说,频域环路采用逐点跟踪,对一个子载波数据符号进行相差估计后,对下一个子载波数据符号进行相位调整;而时域环路则对一个OFDM符号中FED输出的所有估计相差在累加平均器中进行平均,对下一个OFDM符号的相位均值进行调整。
误差估计单元(FED)利用各子载波上的数据符号提取误差,误差提取算法采用通用环误差提取算法。算法表达式为:
e()=ekI·sgn(bk)-ekQ·sgn(ak) (1)
其中,ekI=ak-Ik,ekQ=bk-Qk,ak和bk分别是FFT输出的第k个子载波上数据符号的实部和虚部,Ik和Qk则对应该子载波正确星座点的实部和虚部。对多进制正交幅度调制(MQAM),Ik和Qk可取±1,±3,±5…中的任一值,因而,误差信号ek的实部和虚部可采用如下简化定点算法:
ekI=(ak mod 2)-1,ekQ=(bk mod 2)-1 (2)
由误差提取算法的鉴相特性可知,在利用该算法进行跟踪MQAM时,所有M个误差矢量都是有效的。即,每个子载波数据符号都可以使用。
详细描述上面的说明,该方法步骤可以分成六步:
第一步:对当前OFDM符号的N个时域样点进行相位纠正。具体是,有限精度的正/余弦表放置在数据存储器中,表值为
 m=0,1,…M-1和
m=0,1,…M-1和
 m=0,1,…M-1。m为查表地址。在如图1所示的地址生成单元中,时域环路滤波器的输出φl取整,得到
m=0,1,…M-1。m为查表地址。在如图1所示的地址生成单元中,时域环路滤波器的输出φl取整,得到 作为正/余弦表的偏移地址。加上起始地址n0,得到查表地址
输入正/余弦表,输出
和
与当前OFDM符号的第一个样点数据复数相乘。然后,在地址生成单元中,
累加到新的查表地址
输入正/余弦表,输出 和
与当前OFDM符号的第二个样点数据复数相乘。依次类推,直到所有N个样点完成上述相位纠正。
和
与当前OFDM符号的第二个样点数据复数相乘。依次类推,直到所有N个样点完成上述相位纠正。
第二步:当前OFDM符号的N个样点做N点FFT运算,并/串转换后输出。
第三步:对串行输出的N个子载波数据符号逐个进行载波相位纠正。具体是,频域环路滤波器的输出θk取整,得到
作为正/余弦表的查表地址
输入正/余弦表,输出
 和
和
 与当前第k个子载波数据符号复数相乘。相乘后,对该子载波解映射后输出有效比特。
与当前第k个子载波数据符号复数相乘。相乘后,对该子载波解映射后输出有效比特。
第四步:提取误差增量e()。利用式(1)或其简化算法式(2)从当前第k号子载波计算误差增量e()。误差增量e()输出到频域环路滤波器
 误差增量e()同时输出到累加平均器进行N点求和平均。
误差增量e()同时输出到累加平均器进行N点求和平均。
第五步:返回第三步,直到完成所有N个子载波数据符号相位纠正。完成后,累加平均器输出一次,其结果输入时域环路滤波器
第六步:返回第一步。输入下一个OFDM符号。
如果在一个长帧(frame)中所有子载波数据符号调制方式相同(例如,符合IEEE 802.11a的PPDU帧格式),则根据帧头所携带的调制信息,逐帧调整跟踪环路增益K1、K2,适应不同调制方式。如果在某些非标准系统中,各子载波数据符号调制方式不同,则根据边带或其他方式携带的调制信息,逐符号调整跟踪环路增益K1、K2。因此,该环路对不同的数据符号调制方式,误差提取算法相同,仅环路增益不同。
该方法还可以简化为间隔载波跟踪的方式,不需要逐载波跟踪。此时,在FFT的输出端间隔进行误差提取,θk一直保持到下一次误差提取输出。跟踪环路增益K1、K2做适当调整,使环路达到收敛。其它单元不需要进行改动。此外,当ICI的影响较小时,还可采用只从频域上进行跟踪的方式。此时,只需要取消时域跟踪环路,调整频域跟踪环路增益K1,使环路达到收敛,其它单元不需要进行改动。
该方法的突出优势在于,在提高OFDM频谱利用率的同时,极大降低了复杂度,实现灵活、结构简单。既可以通过硬件系统,如FPGA(现场可编程逻辑阵列)中实现,也可以通过软件系统,如在DSP(数字信号处理器)中实现。图2和图3分别给出了该环路跟踪方法的实施系统例子。图2则给出了在FPGA内实现本发明的硬件电路框图。图3给出了在一款DSP芯片TMS320C6701中实现的本发明的完整软件流程图。需要说明的是,本方法原理框图中的环路滤波器由图2和图3中的环路累加器实现。同时,为了简化指令和硬件结构,原理框图中的平均累加器简化到φl环路累加器中。φl累加器和θk累加器都利用误差估计器输出的误差增量e()进行累加。正/余弦查找表事先放置在DSP(和FPGA)的内部数据存储器空间,φ1累加器和θk累加器的输出通过移位(寄存器)获得存储器查表地址,其精度与查找表大小有关。
FPGA中误差提取单元的实施可以用简单的组合逻辑和减法器构成。见图2(b),其中,判决电路可由简单的与或门逻辑构成。在DSP中,该部分则利用单指令周期的位与指令、减法指令和条件取反指令实现。与一般有导频辅助算法相比,该方法不需要复杂的相关运算和除法运算,极大地降低了算法的实现难度,提高了运行实时性。
图4给出了AWGN信道条件下本发明提出的无导频辅助方法与传统的导频辅助方法的性能比较曲线。其中,系统信噪比定义为
即,发送端时域信号的平均功率与高斯白噪声平均功率之比。归一化载波频偏(与子载波间隔之比)取值分别为:4%、3%、2%和1%。可以看到,在极低信噪比下,本发明对载波频偏的跟踪精度劣于导频辅助方法,这是由于此时信号星座点过于分散,对频域跟踪环路影响较大;其他情况下,其跟踪精度明显优于导频辅助方法,与无频偏时系统误码率相近。这是因为该方法很好地从大量信号中提取出误差信息,而不是从少量导频中提取,再由数字跟踪环路对信号进行跟踪锁定,大大提高了系统的抗噪声性能。图5给出了本发明的一个应用实例,在一个实际的OFDM无线传输系统应用中采集得到的接收信号和跟踪处理后信号16QAM星座点图。5(a)是从实际无线信道中采集得到的原始星座点图,未做任何处理;5(b)是经本方法同步跟踪后的星座点图。
Claims (3)
1、无导频辅助的正交频分复用(OFDM)全数字同步跟踪方法,其特征在于:它是一种运算量小、软硬件实现简单、频带利用率高的时频二维环路跟踪方法;利用每个子载波上各数据符号的信号特征进行频差跟踪,时域环路对一个OFDM符号中误差估计器(FED)输出的所有估计相差在累加平均器中进行平均,得到的估计相差在快速傅立叶变换(FFT)之前对下一个OFDM符号的相位均值进行调整;频域环路采用逐点跟踪,对一个子载波数据符号进行相差估计后,对下一个子载波数据符号进行相位调整,它包括以下步骤:
(1)对当前OFDM符号的N个时域样点进行相位纠正:上述时域估计相差φl取整后作为正/余弦表的偏移地址,该偏移地址和起始地址共同构成查表地址输入正/余弦表,将正/余弦表的输出与当前OFDM符号的第一个样点数据复数相乘;然后,偏移地址累加为新的查表地址输入正/余弦表,将正/余弦表的输出与当前OFDM符号的第二个样点数据复数相乘;依次类推,直到所有N个样点完成上述相位纠正;
(2)对当前OFDM符号的N个样点做N点FFT运算,并/串转换后输出;
(3)对串行输出的N个子载波数据符号逐个进行载波相位纠正:将频域环路滤波器的输出θk取整作为正/余弦表的查表地址输入到正/余弦表,将正/余弦表的输出与当前第k个子载波数据符号复数相乘;然后,对该子载波解映射后输出有效比特;
(4)提取误差增量e():利用下述通用环误差提取算法计算误差增量e(),并将其分别输出到频域环路滤波器和累加平均器;
e()=ekI·sgn(bk)-ekQ·sgn(ak)
其中,ekI=ak-Ik,ekQ=bk-Qk,ak和bk分别是FFT输出的第k个子载波上数据符号的实部和虚部,Ik和Qk则对应该子载波正确星座点的实部和虚部;
(5)返回步骤(3),完成所有N个子载波数据符号相位纠正为止;
(6)累加平均器输出一次,其结果输入时域环路滤波器;
(7)返回步骤(1),输入下一个OFDM符号。
2、根据权利要求1所述的同步跟踪方法,采用简化误差提取算法,其特征在于:在上述步骤(4)中,当Ik和Qk取±1,±3,±5,...中的任一值时,将采用适用于多进制正交幅度调制(MQAM)的简化定点算法:ekI=(ak mod 2)-1,ekQ=(bk mod 2)-1。
3、无导频辅助的正交频分复用(OFDM)全数字同步跟踪系统,其特征在于,依照权利要求1所述方法,仅利用子载波上的数据符号进行频差的跟踪,并使跟踪环路适应不同星座映射方式,从而实现频带利用率提高并结构简化的系统,其软硬件结构简单,实现复杂度很低,易于在现场可编程逻辑阵列(FPGA)的硬件系统或数字信号处理器(DSP)的软件系统中实现,它包含:
时域复数乘法器:输入端与输入寄存器的输出端相连;
依次串接的串并转换器、N点FFT变换器和并串转换器:对当前OFDM符号的N个样点做N点FFT运算,并串转换后输出;其中串并转换器的输入端与时域复数乘法器的输出端相连;
频域复数乘法器:对串行输出的N个子载波数据符号逐个进行载波相位校正;输入端与上述并串转换器的输出端相连,输出信号经解映射后转换成串行输出的原始码流;
误差估计器:提取误差增量e(),输入端与频域复数乘法器的输出端相连;
数据存储器:存储正/余弦表数据,数据输出端分别与时域复数乘法器和频域复数乘法器相连;
依次串接的实数乘法器K1、θk累加器和移位寄存器,其中,实数乘法器K1输入端与误差估计器输出端相连,移位寄存器输出端与上述数据存储器地址线相连;
依次串接的实数乘法器K2、φl累加器、移位寄存器和地址累加器,其中,实数乘法器K2输入端与误差估计器输出端相连,地址累加器输出端与上述数据存储器地址线相连;
时钟电路:分别向各个累加器、输入寄存器等提供时钟或N分频的时钟;
在上述系统的误差估计器中,包括以下部分:
误差信号ek实部/虚部判决器:输入端分别与并串转换器的实部/虚部输出端相连,判决输入信号的原始星座点并输出;
误差信号ek实部/虚部符号判决器:输入端分别与并串转换器的实部/虚部输出端相连,判决输入信号的符号并输出;
减法器:一个输入端为实部/虚部判决器的输出,另一个输入端为并串转换器的实部/虚部输出;
条件取反器:条件输入端为符号判决器的输出,数据输入端为减法器输出;
输出端减法器:两个输入端分别为两个条件取反器的输出;
在所述系统中,误差估计器、实数乘法器K1、θk累加器、移位寄存器、共用的数据存储器和频域复数乘法器组成频域同步跟踪环路,采用逐点跟踪,对一个子载波数据符号进行相差估计后,对下一个子载波数据符号进行相位调整;误差估计器、实数乘法器K2、φl累加器、移位寄存器、地址累加器、共用的数据存储器和时域复数乘法器组成时域同步跟踪环路,对一个OFDM符号中误差估计器输出的所有估计相差在累加平均器中进行平均,得到的估计相差在FFT之前对下一个OFDM符号的相位均值进行调整。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 03124223 CN1217503C (zh) | 2003-05-01 | 2003-05-01 | 无导频辅助的正交频分复用全数字同步跟踪方法及系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN 03124223 CN1217503C (zh) | 2003-05-01 | 2003-05-01 | 无导频辅助的正交频分复用全数字同步跟踪方法及系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1452332A CN1452332A (zh) | 2003-10-29 |
| CN1217503C true CN1217503C (zh) | 2005-08-31 |
Family
ID=29222874
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN 03124223 Expired - Fee Related CN1217503C (zh) | 2003-05-01 | 2003-05-01 | 无导频辅助的正交频分复用全数字同步跟踪方法及系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN1217503C (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8630000B2 (en) | 2001-01-19 | 2014-01-14 | Flexiworld Technologies, Inc. | Essential components for enabling a pervasive wireless digital ecosystem and wireless devices that support the wireless digital ecosystem |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8275052B2 (en) * | 2004-06-28 | 2012-09-25 | Nokia Corporation | FFT carrier frequency offset estimation for OFDM signal |
| CN1937605B (zh) * | 2005-09-19 | 2010-12-01 | 中兴通讯股份有限公司 | 一种相位获取装置 |
| TWI332784B (en) * | 2005-09-22 | 2010-11-01 | Qualcomm Inc | Pilot grouping and route protocols in multi-carrier communication systems |
| US8619744B2 (en) * | 2006-10-16 | 2013-12-31 | Nec Corporation | Reception method and receiver |
| CN101741777B (zh) * | 2008-11-25 | 2013-04-24 | 瑞昱半导体股份有限公司 | 可估测复数数据信号的虚部成份的通讯信号接收器及方法 |
| CN110365421B (zh) * | 2019-07-09 | 2021-09-10 | 哈尔滨工程大学 | 一种单载波干扰抑制的多输入多输出水声通信方法 |
-
2003
- 2003-05-01 CN CN 03124223 patent/CN1217503C/zh not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8630000B2 (en) | 2001-01-19 | 2014-01-14 | Flexiworld Technologies, Inc. | Essential components for enabling a pervasive wireless digital ecosystem and wireless devices that support the wireless digital ecosystem |
| US8989064B2 (en) | 2001-01-19 | 2015-03-24 | Flexiworld Technologies, Inc. | Wireless controller wire connectable to output devices such as televisions for accessing digital content and for wireless communication with mobile information apparatus |
| US9042811B2 (en) | 2001-01-19 | 2015-05-26 | Flexiworld Technologies, Inc. | Specification of smart wireless television for rendering digital content |
| US9069510B2 (en) | 2001-01-19 | 2015-06-30 | Flexiworld Technologies, Inc. | Touch sensitive screen information apparatus that includes close proximity or near distance radio frequency field communication |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1452332A (zh) | 2003-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1277359C (zh) | 正交频分复用通信系统载波频率偏移估计方法 | |
| JP4900447B2 (ja) | 送信装置及び送信方法 | |
| JP2014526201A (ja) | フィルタバンク・マルチキャリア・システムにおいてpaprを低減させるための方法および装置 | |
| CN1874335A (zh) | 信号时序同步的方法以及同步电路 | |
| CN108933749B (zh) | 混叠广义频分复用多载波调制系统 | |
| CN1719819A (zh) | 一种改进的基于pn序列的ofdm定时同步方法 | |
| CN107800662A (zh) | 一种降低扩频ofdm信号峰值平均功率比的方法 | |
| CN102946372B (zh) | Ofdm系统中频偏和时偏的联合估计方法 | |
| CN113079122A (zh) | 截断与外推重构多载波信号中导频序列的设计方法 | |
| CN1217503C (zh) | 无导频辅助的正交频分复用全数字同步跟踪方法及系统 | |
| CN1913509A (zh) | 一种正交频分复用技术无线系统中的同步方法 | |
| CN1921466A (zh) | 利用旋转技术解决ofdm截取位置跳变的信道估计方法 | |
| CN103023850B (zh) | 可变带宽的ofdm发射机和接收机 | |
| CN1655544A (zh) | 基于正交频分复用的通信系统的码元定时同步方法 | |
| US6990062B2 (en) | Reduced complexity DMT/OFDM transceiver | |
| CN1543102A (zh) | 一种新的ofdm频偏估计和跟踪方案 | |
| CN1885845A (zh) | 一种非数据辅助的正交频分复用系统频偏跟踪方法 | |
| CN112910814B (zh) | 一种基于部分响应的水声通信多载波调制方法 | |
| CN114338334A (zh) | 一种基于伪码导频的相位噪声估计与补偿方法 | |
| CN112202697B (zh) | 一种信号的处理方法、装置、存储介质以及电子装置 | |
| CN115173953A (zh) | 一种运用预失真技术提升混合haco-ofdm性能的方法 | |
| KR102177342B1 (ko) | 통신 시스템의 신호 수신 방법 및 장치 | |
| JP4440655B2 (ja) | 直交波周波数分割多重システムの搬送波周波数オフセットと位相の補償装置及び方法 | |
| CN106850490B (zh) | 一种低复杂度的高速ofdm信号时频同步方法及系统 | |
| CN109039985B (zh) | 一种基于重采样的ofdm信号盲解调方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20050831 Termination date: 20190501 |