CN116242575A - 一种低速风洞虚拟飞试验装置 - Google Patents
一种低速风洞虚拟飞试验装置 Download PDFInfo
- Publication number
- CN116242575A CN116242575A CN202310510549.4A CN202310510549A CN116242575A CN 116242575 A CN116242575 A CN 116242575A CN 202310510549 A CN202310510549 A CN 202310510549A CN 116242575 A CN116242575 A CN 116242575A
- Authority
- CN
- China
- Prior art keywords
- frame
- rotating shaft
- wind tunnel
- lifting assembly
- motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M9/00—Aerodynamic testing; Arrangements in or on wind tunnels
- G01M9/02—Wind tunnels
- G01M9/04—Details
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64F—GROUND OR AIRCRAFT-CARRIER-DECK INSTALLATIONS SPECIALLY ADAPTED FOR USE IN CONNECTION WITH AIRCRAFT; DESIGNING, MANUFACTURING, ASSEMBLING, CLEANING, MAINTAINING OR REPAIRING AIRCRAFT, NOT OTHERWISE PROVIDED FOR; HANDLING, TRANSPORTING, TESTING OR INSPECTING AIRCRAFT COMPONENTS, NOT OTHERWISE PROVIDED FOR
- B64F5/00—Designing, manufacturing, assembling, cleaning, maintaining or repairing aircraft, not otherwise provided for; Handling, transporting, testing or inspecting aircraft components, not otherwise provided for
- B64F5/60—Testing or inspecting aircraft components or systems
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M9/00—Aerodynamic testing; Arrangements in or on wind tunnels
- G01M9/06—Measuring arrangements specially adapted for aerodynamic testing
- G01M9/062—Wind tunnel balances; Holding devices combined with measuring arrangements
Abstract
本发明涉及风洞试验技术领域,具体涉及一种低速风洞虚拟飞试验装置。本发明包括升降组件、称重组件、整流架和绝对位置编码器,升降组件包括电机,驱动升降组件整体进行铅垂方向的升降运动,通过绝对位置编码器输出量的变化量判断升降组件的运动方向,称重组件中的称重传感器测量升降组件及安装在其上的其他结构在铅垂方向的荷载及变化。本申请结合称重传感器的输出量变化量和绝对位置编码器判断的运动方向对电机采用力矩控制方式,使模型在铅垂方向处于动态受力平衡的状态。本申请同时改进了转角头,模型与外框架固联,内框架可绕偏航向摆动,中框架可绕俯仰向摆动,外框架可绕滚转向摆动,模型能在三个姿态方向自由摆动、相互独立。
Description
技术领域
本发明涉及风洞试验技术领域,具体涉及一种低速风洞虚拟飞试验装置。
背景技术
低速风洞虚拟飞行试验技术是一种基于试验装置、地面操纵站和飞控系统实现动力学相似缩比模型飞行验证的动态试验模拟技术,用于在低速风洞开展飞行器研发早期的气动、飞行与控制一体化验证与评估,以及飞行器的非定常气动问题研究、飞行控制律验证、飞行品质评价、失速尾旋模拟和过失速机动模拟等,具有降低飞行试验风险、缩短飞行器研发周期和降低研发成本的明显优势,也会成为对飞机飞行硬件系统进行故障诊断的有力手段。
低速风洞虚拟飞试验装置作为开展虚拟飞行试验的基本设施,对模型飞行验证的动态试验模拟能力非常重要。现有的低速风洞虚拟飞试验装置可实现模型的两轴或三轴姿态运动,即采用虎克铰结构实现模型的偏航角和俯仰角或者俯仰角和滚转角方向的组合自由转动,或者采用球铰结构实现模型的偏航角、俯仰角和滚转角方向的组合转动。但采用虎克铰结构时,一般只能实现模型两轴姿态运动,即使有些可实现模型三轴姿态运动,但结构的自由度不能和模型的三轴姿态转动一一对应,也不能单独锁定或者单独放开某一个或某两个的模型姿态转动。同样,采用球铰结构时,由于球铰本身就是将三轴姿态转动完全耦合,因此根本不可能将模型的三轴姿态转动分别独立控制。总之这些装置不能单独锁定或者单独放开任意一个、两个甚至全部三个模型姿态转动,另外即使能放开也无法单独调整转动范围,这些都会给试验研究带来很大限制,特别是无法完成飞行器某一操纵器的效果验证。
另外,倾转旋翼飞机是目前飞行器研发的热点,而起降倾转控制是该类飞行器的技术难点。而要开展倾转旋翼飞机的起降倾转控制技术研究,虚拟飞行试验是主要的手段之一。针对倾转旋翼飞机的特点,要开展此类飞行器的虚拟飞行,虚拟飞试验装置除了要具备模型的三轴姿态独立自由运动的要求外,模型还必须同时具备铅垂方向的自由升沉运动能力。目前常用的方法是将现有的自由摆动机构安装在能铅垂运动的升降柱上部,并采用可调整重量的配重,通过拉线和定滑轮,用配重的重量来平衡模型和升降柱的重量。但由于受模型及其构型变化造成的模型重量变化、以及各接触部位的阻力、拉线刚度和整个升沉组件的动态特性影响,因此采用这种方式会存在较大误差,一般很难实现模型在铅垂方向的自由升沉。特别是试验时各接触部位摩擦阻力的方向和运动方向相反,并不总能维持在一个方向上,无法将阻力影响降到最小。
综上所述,现有技术存在:
1. 采用配重块、拉线和定滑轮平衡模型升降重量,存在较大误差,很难实现模型在铅垂方向自由升沉的技术问题;
2. 转角头采用虎克铰时,一般只能实现模型两轴姿态运动,即使有些可实现模型三轴姿态运动,但结构的自由度不能和模型的三轴姿态转动一一对应,也不能单独锁定或者单独放开某一个或某两个的模型姿态转动;
3.转角头使用球铰结构时,不能将模型的三轴姿态转动分别独立控制。
发明内容
为了解决现有技术中采用配重块、拉线和定滑轮平衡模型升降重量,存在较大误差,很难实现模型在铅垂方向自由升沉的技术问题,本发明提供一种低速风洞虚拟飞试验装置,本发明包括升降组件、称重组件、整流架和绝对位置编码器四大部分,称重组件中的称重传感器能测量升降组件及安装在其上模型等其他结构在铅垂方向的荷载及其变化,通过绝对位置编码器输出量的变化量判断升降组件升沉方向,结合称重传感器的输出变化量和升降组件升沉方向对电机采用力矩控制方式,使得模型在铅垂方向处于动态受力平衡状态。本申请具体如下:
本申请提供一种低速风洞虚拟飞试验装置,其包括升降组件、称重组件和整流架;所述升降组件包括导轨、丝杆和电机,所述称重组件包括称重传感器和螺母,所述称重传感器固定连接在所述整流架上,所述螺母固定连接在所述称重传感器上,所述导轨与所述整流架滑动配合,所述丝杆与所述螺母组成丝杆螺母副,所述电机的输出轴与所述丝杆传动连接,在电机的作用下所述丝杆转动,带动所述升降组件沿铅垂方向做上升或下降运动;还包括与电机配套并设置在电机上的绝对位置编码器。
进一步的是,所述整流架内设置有基座,所述导轨与所述基座滑动配合,所述称重传感器固定连接在所述基座上。
进一步的是,所述电机为交流伺服电机,所述电机的输出轴与所述丝杆同轴设置且固定连接。
进一步的是,所述导轨为滚珠直线导轨,所述丝杆为滚珠丝杆。
进一步的是,还包括设置在升降组件上方、与升降组件固定连接的芯轴,所述芯轴的轴心线与铅垂方向平行,所述芯轴上设置有通过第一轴承转动连接的内框架,所述内框架可绕芯轴的轴心线做偏航方向转动。
进一步的是,在所述内框架上设置有第二转动轴,所述第二转动轴的轴心线水平,所述内框架外侧设有中框架,所述中框架与第二转动轴通过第二轴承转动连接,所述中框架可绕第二转动轴的轴心线做俯仰方向转动。
进一步的是,在所述中框架上设置有第三转动轴,所述第三转动轴的轴心线与所述第二转动轴的轴心线垂直,所述芯轴、所述第二转动轴和所述第三转动轴的轴心线在空间内交于一点,在所述中框架外侧的设有外框架,所述外框架与所述第三转动轴通过第三轴承转动连接,所述外框架可绕所述第三转动轴的轴心线做滚转方向转动、可绕所述第二转动轴的轴心线做俯仰方向转动、可绕所述芯轴的轴心线做偏航方向转动。
进一步的是,所述芯轴、第二转动轴和第三转动轴上均固定设置有第一限位结构,所述内框架、中框架和外框架上均固定设置有第二限位结构,所述第一限位结构位于第二限位结构的转动路径上以限制内框架、中框架和外框架的转动范围。
进一步的是,所述第一限位结构为设置在各轴上的定位杆,所述第二限位结构为设置在各框架上的两个挡块,所述定位杆位于两个挡块之间。
进一步的是,还包括支杆,所述支杆下方与所述升降组件固定连接,所述支杆上方与所述芯轴固定连接。
本发明的有益效果是:
1. 本申请包括升降组件、称重组件、整流架和绝对位置编码器四部分,升降组件包括电机,电机用于驱动升降组件整体进行铅垂方向的升降运动,通过绝对位置编码器输出量的变化量判断升降组件运动方向即模型的升降运动方向,称重组件中的称重传感器测量升降组件及安装在其上的模型等其他结构在铅垂方向的荷载及变化。本申请结合称重传感器的输出量变化量和绝对位置编码器判断的运动方向对电机采用力矩控制方式,使得装在本申请低速风洞虚拟飞试验装置上的模型在铅垂方向处于动态受力平衡的状态。具体的是,通过调节电机输出力矩使其作用力与模型、升降组件、转角头的重力与摩擦阻力的合力的方向相反,使得绝对位置编码器输出量的变化量趋于零,便可将模型调整到铅垂方向动态受力平衡的状态。
2. 本申请进一步对转角头进行了改进,本申请的转角头设置有内框架,中框架、外框架、芯轴、第二转动轴和第三转动轴等几部分。芯轴的轴心线与铅锤方向平行,芯轴和内框架通过第一轴承转动连接;第二转动轴设置在内框架上,第二转动轴的轴心线水平布置,中框架通过第二轴承与第二转动轴转动连接;第三转动轴设置在中框架上,第三转动轴的轴心线与第二转动轴的轴心线垂直,且芯轴、第二转动轴和第三转动轴的轴心线在空间内交于一点;外框架通过第三轴承与第三转动轴转动连接。通过上述结构设计,外框架能带动与其固连在一起的模型绕第三转动轴的轴心线做滚转方向转动、绕第二转动轴的轴心线做俯仰方向转动、绕芯轴的轴心线做偏航方向转动。本申请采用轴承连接的方式新颖,与现有技术采用虎克铰、球铰的结构相比,本申请模型在三个姿态方向自由摆动,且三个姿态方向的摆动是相互独立、互不影响的。
3. 本申请进一步的在各转动轴和各框架上设置有限位结构,能实现对各个方向转动角度的限制,也能实现锁定其中某些转动方向。
4.结合本申请对控制模型升降部分的改机和对转角头部分的改进,本申请能用于模型三轴姿态自由摆动和铅垂方向自由升沉,四个自由度可分别独立锁定或者放开,为开展飞行器飞行验证,特别是为某一操纵器的效果验证、以及倾转旋翼飞机起降倾转控制提供了强有力的技术支撑。
附图说明
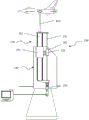
图1是本申请一种低速风洞虚拟飞试验装置整体结构示意图;
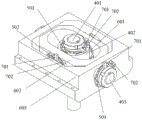
图2是本申请转角头第一视角示意图;
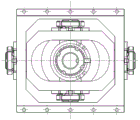
图3是本申请转角头第二视角示意图;
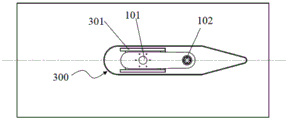
图4是本申请本申请整流架横截面示意图。
图中标记为:100-升降组件,101-导轨,102-丝杆,103-电机,200-称重组件,201-称重传感器,202-螺母,300-整流架,301-基座,401-芯轴,402-第二转动轴,403-第三转动轴,501-第一轴承,502-第二轴承,503-第三轴承,601-内框架,602-中框架,603-外框架,701-第一限位结构,702-第二限位结构,800-支杆。
具体实施方式
以下结合附图对本发明的具体实施方式作进一步具体说明,以便对本发明的构思、所解决的技术问题、构成技术方案的技术特征和带来的技术效果有更进一步的了解。但是,需要说明的是,对这些实施方式的说明是示意性的,并不构成对本发明的具体限定。
首先本申请解决传统方案中采用配重块、拉线和定滑轮平衡模型升降重量,存在较大误差,很难实现模型在铅垂方向自由升沉的技术问题,本申请是这样实现的:
本申请所提供的一种低速风洞虚拟飞试验装置,其包括升降组件100、称重组件200、整流架300和绝对位置编码器。所述升降组件100包括电机103,所述电机103驱动升降组件100整体上下升降。所述称重组件200中的称重传感器201测量升降组件100及安装在升降组件100上模型等其他结构在铅垂方向的荷载及变化。所述绝对位置编码器输出量的变化量能判断升降组件100的运动方向。结合所述称重传感器201的输出量变化量和绝对位置编码器判断的运动方向对电机103采用力矩控制方式,使得装在本申请低速风洞虚拟飞试验装置上的模型在铅垂方向处于动态受力平衡的状态。
具体如下,如图1和图4所示:
本申请包括升降组件100、称重组件200和整流架300。所述升降组件100包括导轨101、丝杆102和电机103。所述称重组件200包括称重传感器201和螺母202。所述称重传感器201固定连接在所述整流架300上,所述螺母202固定连接在所述称重传感器201上,所述导轨101与整流架300滑动配合,所述丝杆102与所述螺母202组成丝杆102螺母202副。所述电机103输出轴与所述丝杆102传动连接,在所述电机103的作用下所述丝杆102转动,带动所述升降组件100整体沿铅锤方向上升或下降运动。本申请还包括与电机103配套的绝对位置编码器。
本领域技术人员应当理解的是,本申请所述螺母202其上设置有与丝杆102配合的内螺纹,其外形多样,在本申请中并不限制其外形,使用者根据其安装环境、连接配合等因素做适应性设计即可。本申请中升降组件100包括导轨101,导轨101与整流架300滑动配合,以限制升降组件100的运动方向。丝杆102和螺母202连接组成丝杆螺母副,螺母202与称重传感器201固定连接,称重传感器201与整流架300固定连接,电机103驱动丝杆102转动,由于螺母202固定即可实现丝杆102上下运动,进而实现升降组件100整体在铅垂方向做上升或下降运动。
进一步的是所述整流架300内设置有基座301,基座301与整流架300固定连接,所述导轨101与所述基座301滑动配合,即实现了所述导轨101与所述整流架300滑动配合的目地。应当理解的是,基座301的具体结构、尺寸等是多种多样的,在本申请中并不限定基座301的具体结构。在本申请实施例中,基座301上设有沿铅垂方向贯通的通孔,导轨101的轴线与沿铅垂方向平行且与该通孔实现滑动配合,基座301外侧与整流架300固定连接,可以是螺栓连接、卡接等。
当本申请的整流架300上设置有基座301,基座301与导轨101导滑后,进一步的是可以将称重传感器201固定连接在基座301上,以实现称重传感器201与整流架300固定连接。
请参照图4所示,本申请实施例中整流架的横截面形状呈对称翼型。
请参照图1,本申请称重传感器201测量的是升降组件100及安装在升降组件100上其他结构例如支杆800、模型、转角头等在铅垂方向的荷载及变化。对于螺母202具体安装在称重传感器201上的哪一部件上、称重传感器201上的哪一部件和整流架300固定连接等,根据上述称重传感器201所要实现测量的范围,本领域技术人员是容易想到的,因此,在此不做赘述。
在上述提到所述电机103输出轴与丝杆102传动连接,电机103驱动丝杆102转动,带动升降组件100升降运动。容易理解的是,电机103的可以是横卧安装也可以是立式安装,无论横卧安装或立式安装,在配合直齿轮、锥齿轮、联轴器等传动结构时均是能实现电机103驱动丝杆102转动的。因此,在本申请中并不限定电机103的输出轴与丝杆102之间具体的传动连接结构。但作为优选的是,如图1所示,在本申请中,电机103立式安装,电机103输出轴与丝杆102同轴设置,电机103的输出轴和丝杆102间采用联轴器固定连接,电机103壳体与升降组件100上连接丝杆102和导轨101的连接件固定连接。这样的设计,能使减少传动结构,使结构更精简,电机103输出的力直接作用在丝杆102上,避免多级传动造成的能量损失,传动效果更好。
在本申请中,电机103在调整铅垂方向动态受力平衡发挥着至关重要的作用,通过调节电机输出力矩使其作用力与模型、升降组件、转角头的重力与摩擦阻力的合力方向相反,使得绝对位置编码器输出量的变化量为零,进而使得模型在铅垂方向动态受力平衡。能实现上述功能的一种优选电机103为交流伺服电机。
在现有技术中大多电机103内自带有绝对位置编码器,当电机103内自带有绝对位置编码器则本申请便不需要再单独设置绝对位置编码器。若所采用的电机103不带有绝对位置编码器,则需要使用人员自行设置绝对位置编码器。绝对位置编码器的安装方式,安装位置等为本领域技术人员公知,在此不再赘述。
导轨101和整流架300滑动连接,丝杆102和螺母202组成丝杆螺母副,优选的是,导轨101选用滚珠直线导轨,丝杆102选用滚珠丝杆,以减小传动过程中的摩擦阻力。
进一步的是,本申请在解决传统方案中采用配重块、拉线和定滑轮平衡模型升降重量,存在较大误差,很难实现模型在铅垂方向自由升沉的这个技术问题之后,本申请还要在此基础上解决转角头采用虎克铰时,一般只能实现模型两轴姿态运动,即使有些可实现模型三轴姿态运动,但结构的自由度不能和模型的三轴姿态转动一一对应,也不能单独锁定或者单独放开某一个或某两个的模型姿态转动;转角头使用球铰结构时,不能将模型的三轴姿态转动分别独立控制这一技术问题。本申请是这样实现的:
本申请所提供的低速风洞虚拟飞试验装置还包括设置在升降组件100上方、与升降组件100固定连接的芯轴401,且芯轴401的轴心线与铅垂方向平行,所述芯轴401上端设置有通过第一轴承501转动连接的内框架601,所述内框架601可绕芯轴401的轴心线做偏航方向转动。
具体的是,芯轴401和升降组件100的连接方式多样,螺栓固连、焊接等。通常情况下,会在升降组件100和芯轴401间设置支杆800,如图1所示,支杆800下端与升降组件100固连,支杆800上端和芯轴401固连,支杆800通常呈锥形。在本申请中可以设置支杆800也可不设置支杆800,由使用者自行决定。
芯轴401是内框架601实现转动的转轴,如图2和图3所示,内框架601和芯轴401间通过第一轴承501实现转动,内框架601绕芯轴401的轴心线转动即可实现偏航角方向转动。芯轴401的轴心线与铅垂方向平行是为了保证内框架601绕芯轴401转动即是偏航角方向的转动。
进一步的是,本申请所述内框架601上设置有第二转动轴402,所述第二转动轴402的轴心线水平布置,所述内框架601外侧设有中框架602,所述中框架602与第二转动轴402通过第二轴承502转动连接,所述中框架602可绕第二转动轴402的轴心线做俯仰方向的转动。
再进一步的是在所述中框架602上设置有第三转动轴403,所述第三转动轴403的轴心线与所述第二转动轴402的轴心线垂直,且所述芯轴401、所述第二转动轴402和所述第三转动轴403的轴心线在空间内交于一点,在所述中框架602外侧的设有外框架603,所述外框架603与第三转动轴403通过第三轴承503转动连接,所述外框架603可绕所述第三转动轴403轴心线做滚转方向转动、可绕所述第二转动轴402的轴心线做俯仰方向转动、可绕所述芯轴401的轴心线做偏航方向转动。
本申请所提供的低速风洞虚拟飞试验装置,模型安装在所述外框架603上。模型固定安装在所述外框架603上,当模型的机身纵轴与第三转动轴403的轴心线平行,机身横轴与第二转动轴402的轴心线平行,即可实现模型在偏航方向、俯仰方向和滚转方向这三个方向上的自由摆动。三个摆动方向是相互独立的,它们之间互不干扰,能同时实现多向同时摆动,也能实现单向摆动。克服了传统采用虎克铰模型只能实现两轴姿态运动,即使能实现模型三轴姿态运动其结构的自由度也不能和模型姿态转动一一对应的技术问题。解决了传统采用球铰不能将模型三轴姿态角转动分别独立控制的技术问题。
如图2所示,在本申请实施例中,内框架601呈圆柱形,其内设置有第一轴孔,轴孔与芯轴401通过第一轴承501实现转动连接。在内框架601的外侧面设置有两个同轴的第二转动轴402,第二转动轴402的轴心线水平布置,所述中框架602呈口字形,套设在所述内框架601外侧,所述中框架602外侧面上设置有两个同轴的第二轴孔,所述第二轴孔与所述第二转动轴402通过第二轴承502转动连接。所述外框架603也呈口字形,套设在所述中框架602外侧,在所述中框架602外侧面设置有两个同轴的第三转动轴403,所述第三转动轴403的轴心线与第二转动轴402的轴心线垂直,芯轴401、第二转动轴402和第三转动轴403的轴心线在空间内交于一点,在所述外框架603上设置有两个同轴的第三轴孔,第三轴孔与第三转动轴403通过第三轴承503转动连接。
在本申请中,内框架601并不限于如图2和图3所示的圆柱形,其还可以是其他形状,中框架602和外框架603的外形也并不限于如图2和图3所示的口字形,其还可以是圆形,椭圆形等,在本申请中不做限定。
进一步的是,为了限制各个方向的摆动角度,本申请所述芯轴401、第二转动轴402和第三转动轴403上均设置有第一限位结构701,所述内框架601、中框架602和外框架603上均设置第二限位结构702,所述第一限位结构701位于第二限位结构702的转动路经上以限制内框架601、中框架602和外框架603的转动范围。第一限位结构701和第二限位件结构的形式是多种多样。
在本申请具体实施例中,如图2和图3所示,第一限位结构701是固定在芯轴401、第二转动轴402、第三转动轴403上的定位杆;第二限位结构702为设置在各框架上的两个挡块,所述定位杆位于两个挡块之间,即可实现限制内框架601、中框架602和外框架603的转动范围,也即实现了模型在三个姿态方向转动角度的限制。本申请实施例中,挡块是可拆卸连接在内框架601、中框架602和外框架603上的,也就是说同一框架上的两挡块相互间间距可调,进而可实现转动范围的调节,甚至可以将两挡块卡紧定位杆,达到锁定定位杆的作用,也即实现了锁定对应方向转动的作用。按照本申请实施例所述结构能实现单独锁定或者单独放开某一个或某两个方向的转动,能解决虎克铰不能单独锁定或者单独放开某一个或某两个的模型姿态转动的技术问题。
除了本实施例所述的结构能实现限制各个方向的摆动角度,下面几种结构也可实现:1.所述第一限位结构701为分别设置在芯轴401、第二转动轴402、第三转动轴403上的两个挡块,所述第二限位结构702为设置在内框架601、中框架602和外框架603上的定位杆,定位杆位于两挡块之间;2.所述第一限位结构701是固定在芯轴401、第二转动轴402、第三转动轴403上定位杆,所述第二限位结构702为开设在内框架601、中框架602和外框架603上的限位槽,定位杆位于限位槽内;3.所述第一限位结构701是设置在芯轴401、第二转动轴402、第三转动轴403侧面的限位凸起,所述第二限位结构702为开设在各框架轴孔侧面的限位槽,限位凸起位于限位槽内。
进一步的是,本申请还包括支杆800,所述支杆800下方与所述升降组件100固定连接,上方与所述芯轴401固定连接,如图1所示。
芯轴401、第二转动轴402、第三转动轴403、内框架601、中框架602、外框架603以及第一限位结构701和第二限位结构702等部件共同组成了转角头。在风洞实验中,模型是固定安装在转角头上的,具体的是,对于本申请模型安装在外框架603上,因此优选的是外框架603上设有与模型配合连接的连接结构。这些结构可以是卡扣、螺纹孔等等,在本申请中不做限定,使用人员可根据试验要求、连接强度等要求自行设置。
最后为了便于理解,本申请以图1所示结构为例,介绍本申请结构的受力及使用方法。
首先,本申请是通过电机103控制丝杆102转动实现模型的上下升降。
在吹风实验前,若不考虑摩擦阻力对传动过程影响,图1所示结构在铅垂方向受力平衡时,基座301对升降组件100的作用力为升降组件100、模型、支杆800、转角头的重力和。
在吹风实验时,若不考虑摩擦阻力对传动过程影响,图1所示结构在铅垂方向受力平衡时,基座301对升降组件100的作用力为升降组件100、模型、转角头、支杆800的重力与模型所受气动升力的矢量和。
在吹风实验前,若考虑摩擦阻力对传动过程影响,图1所示结构在铅垂方向受力平衡时,基座301对升降组件100的作用力为升降组件100、模型、转角头、支杆800的重力和摩擦阻力的矢量和。此时摩擦阻力等于模型升沉方向变化前后称重传感器201输出量的一半。
在吹风实验后,若考虑摩擦阻力对传动过程影响,模型在气动升力的作用下,产生上下运动时,电机103配套的绝对位置编码器输出量将有变化,根据其输出量的正负号能判断模型的升降运动方向,从而能判断摩擦阻力的方向。此时称重传感器201能测量出升降组件100、模型、转角头、支杆800在铅垂方向的荷载及其变化,通过调节电机输出力矩使其作用力与模型、升降组件、转角头的重力与摩擦阻力的合力方向相反,使电机103配套的绝对位置编码器输出量的变化量为零,即可使模型在铅垂方向处于动态受力平衡的状态,就可获得模型的气动升力对模型状态的影响情况。
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
Claims (10)
1.一种低速风洞虚拟飞试验装置,其特征在于:
包括升降组件(100)、称重组件(200)和整流架(300);
所述升降组件(100)包括导轨(101)、丝杆(102)和电机(103),
所述称重组件(200)包括称重传感器(201)和螺母(202),所述称重传感器(201)固定连接在所述整流架(300)上,所述螺母(202)固定连接在所述称重传感器(201)上,
所述导轨(101)与所述整流架(300)滑动配合,所述丝杆(102)与所述螺母(202)组成丝杆螺母副,
所述电机(103)的输出轴与所述丝杆(102)传动连接,在电机(103)的作用下所述丝杆(102)转动,带动所述升降组件(100)沿铅垂方向做上升或下降运动;
还包括与电机(103)配套并设置在电机(103)上的绝对位置编码器。
2.根据权利要求1所述的一种低速风洞虚拟飞试验装置,其特征在于:所述整流架(300)内设置有基座(301),所述导轨(101)与所述基座(301)滑动配合,所述称重传感器(201)固定连接在所述基座(301)上。
3.根据权利要求1所述的一种低速风洞虚拟飞试验装置,其特征在于:所述电机(103)为交流伺服电机,所述电机(103)的输出轴与所述丝杆(102)同轴设置且固定连接。
4.根据权利要求1所述的一种低速风洞虚拟飞试验装置,其特征在于:所述导轨(101)为滚珠直线导轨,所述丝杆(102)为滚珠丝杆。
5.根据权利要求1至4中任一项所述的一种低速风洞虚拟飞试验装置,其特征在于:还包括设置在升降组件(100)上方、与升降组件(100)固定连接的芯轴(401),所述芯轴(401)的轴心线与铅垂方向平行,所述芯轴(401)上设置有通过第一轴承(501)转动连接的内框架(601),所述内框架(601)可绕芯轴(401)的轴心线做偏航方向转动。
6.根据权利要求5所述的一种低速风洞虚拟飞试验装置,其特征在于:在所述内框架(601)上设置有第二转动轴(402),所述第二转动轴(402)的轴心线水平,所述内框架(601)外侧设有中框架(602),所述中框架(602)与第二转动轴(402)通过第二轴承(502)转动连接,所述中框架(602)可绕第二转动轴(402)的轴心线做俯仰方向转动。
7.根据权利要求6所述的一种低速风洞虚拟飞试验装置,其特征在于:在所述中框架(602)上设置有第三转动轴(403),所述第三转动轴(403)的轴心线与所述第二转动轴(402)的轴心线垂直,所述芯轴(401)、所述第二转动轴(402)和所述第三转动轴(403)的轴心线在空间内交于一点,在所述中框架(602)外侧设有外框架(603),所述外框架(603)与所述第三转动轴(403)通过第三轴承(503)转动连接,所述外框架(603)可绕所述第三转动轴(403)的轴心线做滚转方向转动、可绕所述第二转动轴(402)的轴心线做俯仰方向转动、可绕所述芯轴(401)的轴心线做偏航方向转动。
8.根据权利要求7所述的一种低速风洞虚拟飞试验装置,其特征在于:所述芯轴(401)、第二转动轴(402)和第三转动轴(403)上均固定设置有第一限位结构(701),所述内框架(601)、中框架(602)和外框架(603)上均固定设置有第二限位结构(702),所述第一限位结构(701)位于第二限位结构(702)的转动路径上以限制内框架(601)、中框架(602)和外框架(603)的转动范围。
9.根据权利要求8所述的一种低速风洞虚拟飞试验装置,其特征在于:所述第一限位结构(701)为设置在各轴上的定位杆,所述第二限位结构(702)为设置在各框架上的两个挡块,所述定位杆位于两个挡块之间。
10.根据权利要求7所述的一种低速风洞虚拟飞试验装置,其特征在于:还包括支杆(800),所述支杆(800)下方与所述升降组件(100)固定连接,所述支杆(800)上方与所述芯轴(401)固定连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310510549.4A CN116242575B (zh) | 2023-05-08 | 2023-05-08 | 一种低速风洞虚拟飞试验装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202310510549.4A CN116242575B (zh) | 2023-05-08 | 2023-05-08 | 一种低速风洞虚拟飞试验装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN116242575A true CN116242575A (zh) | 2023-06-09 |
| CN116242575B CN116242575B (zh) | 2023-07-21 |
Family
ID=86628110
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202310510549.4A Active CN116242575B (zh) | 2023-05-08 | 2023-05-08 | 一种低速风洞虚拟飞试验装置 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN116242575B (zh) |
Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08313388A (ja) * | 1995-05-18 | 1996-11-29 | Mitsubishi Heavy Ind Ltd | 風洞試験装置 |
| CN101532895A (zh) * | 2009-03-31 | 2009-09-16 | 清华大学 | 一种张力天平两轴半力分解装置 |
| CN101936806A (zh) * | 2010-07-21 | 2011-01-05 | 北京航空航天大学 | 姿控发动机羽流对大型太阳能电池翼气动力的测量装置 |
| US20130338982A1 (en) * | 2012-06-13 | 2013-12-19 | Robert B. Schwab | Engine Vibration And Engine Trim Balance Test System, Apparatus And Method |
| CN203811349U (zh) * | 2014-03-31 | 2014-09-03 | 南京航空航天大学 | 一种旋翼动态试验装置 |
| CN206450397U (zh) * | 2016-12-29 | 2017-08-29 | 中国航天空气动力技术研究院 | 一种具有平移功能的亚跨超声速风洞大攻角机构 |
| CN108593169A (zh) * | 2018-04-19 | 2018-09-28 | 哈尔滨工业大学 | 旋翼式火星无人机单旋翼系统气动特性测试装置及扭矩测试方法和升力测试方法 |
| DE102017127142A1 (de) * | 2017-11-17 | 2019-05-23 | Rolls-Royce Deutschland Ltd & Co Kg | Flugzeug-Monitoringsystem und Verfahren zum Sammeln von Daten der Flugzeuginstandhaltung |
| CN110207943A (zh) * | 2019-06-26 | 2019-09-06 | 中国航天空气动力技术研究院 | 高超声速风洞虚拟飞行试验系统及试验方法 |
| CN110887635A (zh) * | 2019-12-04 | 2020-03-17 | 中国航空工业集团公司哈尔滨空气动力研究所 | 一种基于水平风洞的飞行器纵向短周期模拟试验装置 |
| CN111284730A (zh) * | 2020-03-24 | 2020-06-16 | 北京理工大学珠海学院 | 一种旋翼飞行器综合测试实验模拟平台及测试方法 |
| CN113252285A (zh) * | 2021-07-15 | 2021-08-13 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种立式风洞模型俯仰-翻滚试验装置及使用方法 |
| CN114310734A (zh) * | 2022-03-14 | 2022-04-12 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种飞机模型沉浮支撑装置及四自由度支撑装置 |
| CN114414191A (zh) * | 2021-12-28 | 2022-04-29 | 中国航天空气动力技术研究院 | 一种舵面模型气动试验装置 |
| CN216621681U (zh) * | 2021-12-24 | 2022-05-27 | 西安现代控制技术研究所 | 一种新型动导数弹性铰链校准装置 |
| CN115077846A (zh) * | 2022-07-28 | 2022-09-20 | 中国空气动力研究与发展中心高速空气动力研究所 | 一种大型风洞地面准备平台 |
| CN115183983A (zh) * | 2022-09-13 | 2022-10-14 | 中国航空工业集团公司沈阳空气动力研究所 | 一种舵面铰链力矩天平验证加载装置 |
-
2023
- 2023-05-08 CN CN202310510549.4A patent/CN116242575B/zh active Active
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08313388A (ja) * | 1995-05-18 | 1996-11-29 | Mitsubishi Heavy Ind Ltd | 風洞試験装置 |
| CN101532895A (zh) * | 2009-03-31 | 2009-09-16 | 清华大学 | 一种张力天平两轴半力分解装置 |
| CN101936806A (zh) * | 2010-07-21 | 2011-01-05 | 北京航空航天大学 | 姿控发动机羽流对大型太阳能电池翼气动力的测量装置 |
| US20130338982A1 (en) * | 2012-06-13 | 2013-12-19 | Robert B. Schwab | Engine Vibration And Engine Trim Balance Test System, Apparatus And Method |
| CN203811349U (zh) * | 2014-03-31 | 2014-09-03 | 南京航空航天大学 | 一种旋翼动态试验装置 |
| CN206450397U (zh) * | 2016-12-29 | 2017-08-29 | 中国航天空气动力技术研究院 | 一种具有平移功能的亚跨超声速风洞大攻角机构 |
| DE102017127142A1 (de) * | 2017-11-17 | 2019-05-23 | Rolls-Royce Deutschland Ltd & Co Kg | Flugzeug-Monitoringsystem und Verfahren zum Sammeln von Daten der Flugzeuginstandhaltung |
| CN108593169A (zh) * | 2018-04-19 | 2018-09-28 | 哈尔滨工业大学 | 旋翼式火星无人机单旋翼系统气动特性测试装置及扭矩测试方法和升力测试方法 |
| CN110207943A (zh) * | 2019-06-26 | 2019-09-06 | 中国航天空气动力技术研究院 | 高超声速风洞虚拟飞行试验系统及试验方法 |
| CN110887635A (zh) * | 2019-12-04 | 2020-03-17 | 中国航空工业集团公司哈尔滨空气动力研究所 | 一种基于水平风洞的飞行器纵向短周期模拟试验装置 |
| CN111284730A (zh) * | 2020-03-24 | 2020-06-16 | 北京理工大学珠海学院 | 一种旋翼飞行器综合测试实验模拟平台及测试方法 |
| CN113252285A (zh) * | 2021-07-15 | 2021-08-13 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种立式风洞模型俯仰-翻滚试验装置及使用方法 |
| CN216621681U (zh) * | 2021-12-24 | 2022-05-27 | 西安现代控制技术研究所 | 一种新型动导数弹性铰链校准装置 |
| CN114414191A (zh) * | 2021-12-28 | 2022-04-29 | 中国航天空气动力技术研究院 | 一种舵面模型气动试验装置 |
| CN114310734A (zh) * | 2022-03-14 | 2022-04-12 | 中国空气动力研究与发展中心低速空气动力研究所 | 一种飞机模型沉浮支撑装置及四自由度支撑装置 |
| CN115077846A (zh) * | 2022-07-28 | 2022-09-20 | 中国空气动力研究与发展中心高速空气动力研究所 | 一种大型风洞地面准备平台 |
| CN115183983A (zh) * | 2022-09-13 | 2022-10-14 | 中国航空工业集团公司沈阳空气动力研究所 | 一种舵面铰链力矩天平验证加载装置 |
Non-Patent Citations (3)
| Title |
|---|
| WANG TIANHAO: ""Definition Measurement Unit with Flexure Hinges for a Wind Tunnel Balance"", 《PROCEEDINGS OF THE 2010 IEEE INTERNATIONAL CONFERENCE ON INFORMATION AND AUTOMATION》, pages 1457 - 1462 * |
| 张海酉: "" FL-14风洞两自由度动态试验装置优化研究"", 《第五届非定常空气动力学学术会议论文集》, pages 21 - 25 * |
| 聂博文: ""倾转四旋翼无人机风洞虚拟飞行初步验证"", 《中国力学大会论文集(CCTAM 2019)》, pages 3137 - 3146 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN116242575B (zh) | 2023-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104787363B (zh) | 一种卫星地面微重力动态加载模拟机构 | |
| CN105547676B (zh) | 一种多功能旋臂式旋翼试验台 | |
| CN104132795B (zh) | 一种可实现风洞虚拟飞行的模型绳索支撑系统 | |
| CN205642791U (zh) | 一种风洞用旋转导弹的锥形运动模拟装置 | |
| CN109018430B (zh) | 旋翼飞行器桨叶性能测试台 | |
| CN111016167B (zh) | 一种具有高响应并联调平机构的增材制造装备及调平方法 | |
| CN110836760B (zh) | 一种用于风洞试验的舰船姿态动态模拟系统及其工作方法 | |
| CN211347313U (zh) | 一种开口风洞两自由度动态试验支撑装置 | |
| CN107757955A (zh) | 多关节空间机构重力卸载装置 | |
| CN108344553B (zh) | 用于飞行器编队飞行的风洞试验模型并联机构支撑装置 | |
| CN106240843B (zh) | 基于可变径机架的多旋翼无人机结构测试装置及方法 | |
| CN2861012Y (zh) | 扑翼飞行机器人研究开发平台 | |
| CN110686855B (zh) | 一种高速风洞平移振动动导数试验装置 | |
| CN111855216A (zh) | 一种固体火箭发动机离心过载试验的试件旋转驱动装置 | |
| CN108454882A (zh) | 一种舵面驱动和舵面角度测量机构 | |
| CN102717897A (zh) | 起落架自控弹簧—阻尼系统气动力负载加载系统及加载方法 | |
| CN106078688B (zh) | 一种重载自平衡三自由度并联机构 | |
| CN112067245A (zh) | 一种高速风洞平移振动动导数试验装置及试验方法 | |
| CN106005458A (zh) | 一种用于无人机高空航拍的自稳平台 | |
| CN114923656A (zh) | 一种用于全机颤振风洞试验的绳索支撑系统 | |
| CN116242575B (zh) | 一种低速风洞虚拟飞试验装置 | |
| CN107860545A (zh) | 大型跨声速风洞大载荷模型捕获轨迹试验的六自由度系统 | |
| CN208070050U (zh) | 一种舵面驱动和舵面角度测量机构 | |
| CN111044221B (zh) | 一种小型无人机三维转动惯量测试台调节装置 | |
| JPH08313388A (ja) | 風洞試験装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |