CN115723035A - 用于监控研磨装置的加工状态的系统、方法及双面研磨装置 - Google Patents
用于监控研磨装置的加工状态的系统、方法及双面研磨装置 Download PDFInfo
- Publication number
- CN115723035A CN115723035A CN202211098362.XA CN202211098362A CN115723035A CN 115723035 A CN115723035 A CN 115723035A CN 202211098362 A CN202211098362 A CN 202211098362A CN 115723035 A CN115723035 A CN 115723035A
- Authority
- CN
- China
- Prior art keywords
- grinding
- grinding device
- double
- target position
- relative
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012544 monitoring process Methods 0.000 title claims abstract description 26
- 238000012545 processing Methods 0.000 title claims abstract description 24
- 238000000034 method Methods 0.000 title claims abstract description 20
- 238000012806 monitoring device Methods 0.000 claims abstract description 57
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 claims abstract description 42
- 229910052710 silicon Inorganic materials 0.000 claims abstract description 42
- 239000010703 silicon Substances 0.000 claims abstract description 42
- 230000003068 static effect Effects 0.000 claims description 55
- 238000005498 polishing Methods 0.000 claims description 41
- 235000012431 wafers Nutrition 0.000 claims 2
- 230000000694 effects Effects 0.000 abstract description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 239000012530 fluid Substances 0.000 description 4
- 239000002184 metal Substances 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 3
- 230000002706 hydrostatic effect Effects 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 238000006467 substitution reaction Methods 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 229910001651 emery Inorganic materials 0.000 description 1
Images








Abstract
本发明实施例公开了用于监控研磨装置的加工状态的系统、方法及双面研磨装置,所述研磨装置用于对硅片进行双面研磨,所述系统包括:位置监测装置,所述位置监测装置用于获取所述研磨装置上的指定点相对于目标位置的位置变化量;控制装置,所述控制装置用于根据所述位置变化量对所述研磨装置的至少一部分施加作用力,以使所述指定点朝向目标位置移位,由此一旦研磨装置因形变而引起加工状态的变化,则可以由位置监测装置监测到并且可以由控制装置通过施加作用力对研磨装置的一部分的位置进行调整,从而确保研磨装置持续保持在能够实现较佳研磨效果的位置范围内,使得研磨后的硅片具有较好的平坦度。
Description
技术领域
本发明涉及半导体制造技术领域,尤其涉及用于监控研磨装置的加工状态的系统、方法及双面研磨装置。
背景技术
半导体硅片的生产工艺通常包括拉晶、线切割、研磨、抛光等处理过程。双面研磨作为一种研磨工艺用于同时对硅片的两个主表面进行研磨以使硅片具有高度平整表面。在双面研磨过程中,需要使用专用装置来保持硅片,以便于研磨轮对硅片的两个主表面同时进行研磨。通常,这种保持装置包括对向设置的一对流体静压板,硅片沿竖向方向设置在两个流体静压板之间,流体静压板可以在其自身与硅片的主表面之间形成流体屏障,以便使硅片能够在不与两个流体静压板相接触的情况下被保持竖立,与此同时,可以利用对置的磨轮对硅片的两个主表面进行研磨。相比于物理夹持,流体静压板的流体夹持方式减少了对硅片的损伤,并使得硅片以较小的摩擦相对于流体静压板表面在切向上移动(转动)。
然而,对于上述双面研磨工艺而言,随着设备的连续操作及研磨水的持续供应,研磨室温度会不断发生变化,导致金属磨床的床体发生一定的形变,由于左、右磨轮通过支撑杆固定在磨床上,一旦磨床发生形变,将导致左、右磨轮的研磨位置随之发生变化,当研磨位置超出预定范围,将无法按照预期轨迹对硅片进行研磨,最终导致加工硅片精度恶化。
因此,在双面研磨过程中,实时对金属磨床的形变进行管控,确保左、右磨轮持续保持在能够实现较佳研磨效果的位置范围内,对提升研磨精度而言非常重要。
发明内容
有鉴于此,本发明实施例期望提供用于监控研磨装置的加工状态的系统、方法及双面研磨装置,通过该系统能够在研磨的过程中实时监测因温度变化等引起的研磨装置的工作状态的变化,并能够根据监测结果对研磨装置施加作用力以使研磨装置恢复工作状态,从而确保硅片的研磨精度。
本发明的技术方案是这样实现的:
第一方面,本发明实施例提供了一种用于监控研磨装置的加工状态的系统,所述研磨装置用于对硅片进行双面研磨,所述系统包括:
位置监测装置,所述位置监测装置用于获取所述研磨装置上的指定点相对于目标位置的位置变化量;
控制装置,所述控制装置用于根据所述位置变化量对所述研磨装置的至少一部分施加作用力,以使所述指定点朝向所述目标位置移位。
第二方面,本发明实施例提供了一种双面研磨装置,所述双面研磨装置用于对硅片进行双面研磨,所述双面研磨装置包括根据第一方面的系统。
第三方面,本发明实施例提供了一种用于监控研磨装置的加工状态的方法,所述方法包括:
通过位置监测装置获取所述研磨装置上的指定点相对于目标位置的位置变化量,
通过控制装置根据所述位置变化量对所述研磨装置的至少一部分施加作用力,以使所述指定点朝向所述目标位置移位。
本发明实施例提供了用于监控研磨装置的加工状态的系统、方法及双面研磨装置;所述系统包括位置监测装置和控制装置,该位置监测装置通过获取研磨装置上的指定点相对于目标位置的位置变化量来监测研磨装置的加工状态变化,另外,控制装置可以根据所获取的位置变化量通过对研磨装置的至少一部分施加作用力来使研磨装置上的指定点朝向目标位置移位,由此,在研磨装置对硅片进行双面研磨操作时,一旦研磨装置因连续操作、研磨水的持续供应等因素带来的温度变化而发生一定的形变并引起加工状态的变化,则可以由位置监测装置监测到并且可以由控制装置通过施加作用力对研磨装置的一部分的位置进行调整,从而确保研磨装置持续保持在能够实现较佳研磨效果的位置范围内,即,持续保持在较佳的加工状态,使得研磨后的硅片具有较好的平坦度。
附图说明
图1为常规的双面研磨装置的示意图;
图2为常规的双面研磨装置的另一示意图,其示出了双面研磨装置受温度影响发生变形的状态;
图3为常规的双面研磨装置的又一示意图,其示出了双面研磨装置受温度影响发生变形的另一状态;
图4为本发明实施例提供的用于监控研磨装置的加工状态的系统和双面研磨装置的示意图;
图5为根据本发明实施例的系统获取研磨装置上的指定点相对于目标位置的位置变化量的原理图;
图6为本发明实施例提供的用于监控研磨装置的加工状态的系统和双面研磨装置的另一示意图;
图7为根据本发明实施例的系统获取研磨装置上的指定点相对于目标位置的位置变化量的另一原理图;
图8为本发明实施例提供的用于监控双面研磨装置的加工状态的系统和双面研磨装置的又一示意图;
图9为根据本发明实施例的系统获取研磨装置上的指定点相对于目标位置的位置变化量又一原理图;
图10为根据本发明实施例的用于监控研磨装置的加工状态的方法的流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
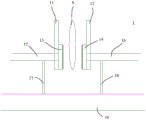
参见图1,其示出了用于对硅片S进行研磨的常规双面研磨装置1,双面研磨装置1包括对向设置的第一静压板11和第二静压板12,以及对向设置的第一研磨轮13和第二研磨轮14,第一静压板11和第二静压板12设置成用于向放置于二者之间的硅片S的两个侧面同时施加流体压力,从而以非接触的方式支承硅片S,第一研磨轮13和第二研磨轮14在硅片S被静压板支承的情况下按照预定的研磨轨迹同时对硅片S的两个侧面进行研磨,双面研磨装置1还包括:第一水平支撑杆15、第二水平支撑杆16、第一竖向支撑杆17、第二竖向支撑杆18、基座19,其中,第一静压板11和第一研磨轮13以及第二静压板12和第二研磨轮14分别经由第一水平支撑杆15和第一竖向支撑杆17以及第二水平支撑杆16和第二竖向支撑杆18支撑在基座19上。
为了对双面研磨装置的各部件进行稳定支撑以使双面研磨操作能够稳定执行,基座19通常由金属制成,并且在研磨期间,还需要对研磨轮和硅片提供研磨水以减少对硅片的不必要损伤。然而,随着设备连续加工及研磨水的持续供应,研磨室温度会不断发生变化,导致金属基座19发生一定的形变,由于研磨轮和静压板通过支撑杆被支撑在基座上,基座发生形变会导致研磨轮的研磨位置随之发生变化,最终导致加工硅片精度恶化。例如,参见图2,当基座19受到温度影响使得其上表面发生向上的膨胀时,设置在基座19上的第一水平支撑杆15、第二水平支撑杆16、第一竖向支撑杆17、第二竖向支撑杆18分别相对于各自的初始竖直位置发生了偏转和偏移,支撑杆的偏转和偏移致使第一静压板11和第一研磨轮13以及第二静压板12和第二研磨轮14也分别相对于它们各自的初始位置发生了偏转和偏移,甚至不再与硅片S的待研磨的侧面平行,类似地,参见图3,当基座19受到温度影响使得其上表面发生向下的收缩时,支撑杆以及因此的静压板、研磨轮也分别相对于它们各自的初始位置发生了偏转和偏移,研磨轮的偏转和偏移将导致研磨轮对硅片的研磨位置偏离于预设位置,这最终使得经研磨之后的硅片的平坦度无法达到预期要求。
为了解决上述问题,参见图4,本发明提出了一种用于监控研磨装置1的加工状态的系统M,所述研磨装置1用于对硅片S进行双面研磨,所述系统M包括:位置监测装置20,所述位置监测装置20用于获取所述研磨装置1上的指定点相对于目标位置的位置变化量;控制装置30,所述控制装置30用于根据所述位置变化量对所述研磨装置1的至少一部分施加作用力,以使所述指定点朝向目标位置移位。关于本发明实施例限定的目标位置,应当理解为,指定点朝向目标位置移位表征研磨装置将朝向相对于硅片的最佳研磨位置靠近,即研磨轮的研磨表面相对于硅片的待研磨表面更趋向于平行并且研磨轮将接近预定研磨轨迹,从而能够获得平坦度有所改善的硅片;进一步,在最优选的情况下,指定点到达目标位置,这表征所述研磨装置相对于硅片处于最佳研磨位置,即研磨轮的研磨表面相对于硅片的待研磨表面保持平行并且研磨轮将按照预定轨迹对硅片进行研磨,从而获得具有最佳平坦度的硅片。
本发明实施例提供了用于监控研磨装置1的加工状态的系统M;所述系统包括位置监测装置20和控制装置30,该位置监测装置20通过获取研磨装置1上的指定点相对于目标位置的位置变化量来检测研磨装置1的加工状态变化,另外,控制装置30可以根据所获取的位置变化量通过对研磨装置1的至少一部分施加作用力来使研磨装置1上的指定点朝向目标位置移位,由此,在研磨装置对硅片进行双面研磨操作时,一旦研磨装置因连续操作、研磨水的持续供应等因素带来的温度变化而发生一定的形变并引起加工状态的变化,则可以由位置监测装置监测到并且可以由控制装置通过施加作用力对研磨装置的一部分的位置进行调整,从而确保研磨装置持续保持在能够实现较佳研磨效果的位置范围内,即,持续保持在较佳的加工状态,使得研磨后的硅片具有较好的平坦度。
根据本发明的实施例,“指定点”可以设定在研磨装置的任何部分处,例如,可以设定在研磨装置的基座、支撑杆等部分上。然而,由于在对硅片进行双面研磨过程中,研磨轮相对于硅片的研磨位置直接影响硅片的平坦度影响并且静压板与研磨轮相对于彼此的位置基本上不变,因此,根据本发明的优选实施例,所述位置监测装置20设置成获取所述研磨装置的研磨轮或静压板上的指定点相对于目标位置的位置变化量。
具体地,在图4中示出的示例中,位置监测装置20被固定在静压板附近并且能够测量其距静压板的水平距离,如果基座19受温度变化的影响发生变形而导致静压板和研磨轮相对于目标位置发生变化时,则静压板和研磨轮距离位置监测装置20的水平距离将发生变化,位置监测装置20可以监测到此位置变化量,并将位置变化量发送至控制装置30,在具体应用中,可以根据产品要求设定允许的位置变化量范围,也就是说允许在双面研磨操作中静压板和研磨轮发生一定程度的位置偏移,但是一旦超出设定的位置变化范围,则控制装置30将执行调整操作,以使静压板和研磨轮朝向目标位置移位,由此,可以改善研磨位置的偏移造成对硅片的平坦度的影响。
根据本发明的优选实施例,所述控制装置30设置成根据所述位置变化量对用于支撑所述研磨轮或所述静压板的支撑杆施加作用力,以使所述研磨轮或所述静压板上的所述指定点朝向目标位置移位,具体而言,在图4、图6和图8中示出的示例中,由于研磨轮和静压板是通过水平支撑杆和竖向支撑杆支撑在基座19上,基座19的变形直接导致与其相连接的竖向支撑杆发生位置偏移,这使得与竖向支撑杆相连接的水平支撑杆也将带动研磨轮和静压板一起发生位置偏移,在这种情况下,控制装置30直接对水平支撑杆施加作用力可以使直接且有效地调整研磨轮和静压板的位置。
如在上文中描述的,在双面研磨装置中,对向设置的静压板向放置于其之间的硅片施加流体压力以支承硅片,在此状态下,对向设置的研磨轮同时对硅片的两个侧面进行研磨操作,因此在双面研磨操作中,需要分别对两个静压板以及两个研磨轮进行监测和控制才能保证硅片的两个侧面的平坦度,基于此,优选地,参见图4,所述系统包括分别用于获取一对所述研磨轮上的指定点相对于目标位置的位置变化量或分别用于获取一对所述静压板上的指定点相对于目标位置的位置变化量的一对位置监测装置,即位置监测装置20包括第一位置监测装置21和第二位置监测装置22。
为了对研磨轮和静压板的位置进行精准监测和控制,优选地,所述位置变化量包括所述研磨轮或所述静压板相对于目标位置的角度偏转量。
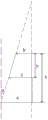
具体地,以图4和图5示出的方案作为示例,在研磨操作开始之前,位置监测装置20可以测量出其距静压板的初始水平距离a,并且位置监测装置20距静压板的中心的竖向距离x是已知的,在研磨操作开始之后,位置监测装置20可以测量出其距静压板的实时水平距离a’,由此控制装置30可以计算出静压板的实时的偏转角度α,偏转角度α可以表征静压板的偏转情况,控制装置30可以基于偏转角度α对研磨装置的水平支撑杆施加作用力以调整静压板的位置,在调整过程中,位置监测装置20继续执行实时监测直至偏转角度α恢复至零或在设定范围内。
为了更精准地获取位置变化量,优选地,参见图6至图9,所述位置监测装置20设置成获取所述研磨装置上的多个指定点相对于各自对应的目标位置的位置变化量,并且所述控制装置30设置成根据所述多个指定点相对于各自对应的目标位置的位置变化量对所述研磨装置的至少一部分施加作用力,以使所述多个指定点中的至少一个指定点朝向所述至少一个指定点对应的目标位置移位。
下面以图6至图9中示出的示例进行详细说明。位置监测装置20包括用于监测第一静压板11的第一位置监测装置21和第三位置监测装置23以及用于监测第二静压板12的第二位置监测装置22和第四位置监测装置24,其中,第一位置监测装置21距第一静压板11的中心以及第二位置监测装置22距第二静压板12的竖向距离均为x,第一位置监测装置21与第三位置监测装置23之间的距离以及第二位置监测装置22与第四位置监测装置24之间的距离均为y,在双面研磨操作开始之前,第一位置监测装置21和第三位置监测装置23距第一静压板11之间的距离以及第二位置监测装置22和第四位置监测装置24距第二静压板12之间的距离均为a;在双面研磨操作开始之后,第一位置监测装置21距第一静压板11的距离以及第二位置监测装置22距第二静压板12的距离可能变为b,第三位置监测装置23距第一静压板11的距离以及第四位置监测装置24距第二静压板12的距离可能变为c,通过第一位置监测装置21和第三位置监测装置23的测量值可以计算出两个偏转角度,控制装置30可以通过取平均值获得更为接近真实值的偏转角度,同理,设置第二位置监测装置22和第四位置监测装置24也有助于获得更为准确的偏转角度。对于本领域技术人员而言,可以理解的是,可以根据实际产品要求设置更多个位置监测装置,以获得更为精准的实际位置变化量。
对于控制装置30的具体实现形式,优选地,所述控制装置设置成能够在伸出状态与缩回状态之间变化的可伸缩装置,其中,所述可伸缩装置在处于所述伸出状态时能够对所述研磨装置的至少一部分施加沿第一方向的力,所述可伸缩装置在处于所述缩回状态时能够对所述研磨装置的至少一部分施加沿与所述第一方向相反的第二方向的力。
参见图4、图6和图8,控制装置30包括第一伸缩杆31和第二伸缩杆32以及第一伸缩驱动部33和第二伸缩驱动部34,其中,第一伸缩杆31和第二伸缩杆32分别与第一伸缩驱动部33和第二伸缩驱动部34连接,使得第一伸缩驱动部33能够驱动第一伸缩杆31沿其延伸方向伸长或缩短,第二伸缩驱动部34能够驱动第二伸缩杆32沿其延伸方向伸长或缩短,由于第一伸缩杆31的一端连接至第一水平支撑杆15,因此第一伸缩杆31伸长或缩回之后可以对第一水平支撑杆15施加相应的作用力,以使第一水平支撑杆15连同第一静压板11和第一研磨轮13发生位置偏移和偏转,同理,第二伸缩杆32的伸长或缩回也可以通过对第二水平支撑杆16施加作用力来使第二水平支撑杆16连同第二静压板12和第二研磨轮14发生位置偏移和偏转,由此实现对静压板和研磨轮的位置调整。应当指出的是,第一伸缩驱动部和第二伸缩驱动部可包括现有的伸缩驱动装置,例如通过马达、齿轮-齿条副的配合等。这些驱动方式都落入本发明的保护范围内。此外,第一伸缩驱动部33和第二伸缩驱动部34还包括计算施加的作用力的大小的处理器(图中未示出),并且第一伸缩驱动部33和第二伸缩驱动部34设置成能够分别与第一位置监测装置21和第三位置监测装置23以及第二位置监测装置22和第四位置监测装置24实时通信,以基于监测装置的测量值执行调整操作,从而形成控制闭环。
参见图4,本发明实施例还提供了一种双面研磨装置1,所述双面研磨装置1用于对硅片S进行双面研磨,所述双面研磨装置1包括根据上文描述的系统M。
参见图10,本发明实施例还提供了一种用于监控研磨装置的加工状态的方法,所述方法包括:
S01:通过位置监测装置获取所述研磨装置上的指定点相对于目标位置的位置变化量;
S02:通过控制装置根据所述位置变化量对所述研磨装置的至少一部分施加作用力,以使所述指定点朝向所述目标位置移位。
根据本发明的优选实施例,所述通过位置监测装置获取所述研磨装置上的指定点相对于目标位置的位置变化量包括:通过位置监测装置获取所述研磨装置的研磨轮或静压板上的指定点相对于目标位置的位置变化量;和/或
所述通过控制装置根据所述位置变化量对所述研磨装置的至少一部分施加作用力包括:通过控制装置根据所述位置变化量对所述研磨装置的用于支撑所述研磨轮或所述静压板的支撑杆施加作用力。
需要说明的是:本发明实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
Claims (10)
1.一种用于监控研磨装置的加工状态的系统,所述研磨装置用于对硅片进行双面研磨,其特征在于,所述系统包括:
位置监测装置,所述位置监测装置用于获取所述研磨装置上的指定点相对于目标位置的位置变化量;
控制装置,所述控制装置用于根据所述位置变化量对所述研磨装置的至少一部分施加作用力,以使所述指定点朝向所述目标位置移位。
2.根据权利要求1所述的系统,其特征在于,所述指定点设定在所述研磨装置的研磨轮或静压板上。
3.根据权利要求2所述的系统,其特征在于,所述研磨装置的一部分包括用于支撑所述研磨轮或所述静压板的支撑杆。
4.根据权利要求2或3所述的系统,其特征在于,所述系统包括分别用于获取一对所述研磨轮上的指定点相对于目标位置的位置变化量或分别用于获取一对所述静压板上的指定点相对于目标位置的位置变化量的一对位置监测装置。
5.根据权利要求2或3所述的系统,其特征在于,所述位置变化量包括所述研磨轮或所述静压板相对于所述目标位置的角度偏转量。
6.根据权利要求1所述的系统,其特征在于,所述位置监测装置设置成获取所述研磨装置上的多个指定点相对于各自对应的目标位置的位置变化量,并且所述控制装置设置成根据所述多个指定点相对于各自对应的目标位置的位置变化量对所述研磨装置的至少一部分施加作用力,以使所述多个指定点中的至少一个指定点朝向所述至少一个指定点对应的目标位置移位。
7.根据权利要求1至3中任一项所述的系统,其特征在于,所述控制装置设置成能够在伸出状态与缩回状态之间变化的可伸缩装置,其中,所述可伸缩装置在处于所述伸出状态时能够对所述研磨装置的至少一部分施加沿第一方向的力,所述可伸缩装置在处于所述缩回状态时能够对所述研磨装置的至少一部分施加沿与所述第一方向相反的第二方向的力。
8.一种双面研磨装置,所述双面研磨装置用于对硅片进行双面研磨,其特征在于,所述双面研磨装置包括根据权利要求1至7中任一项所述的系统。
9.一种用于监控研磨装置的加工状态的方法,其特征在于,所述方法包括:
通过位置监测装置获取所述研磨装置上的指定点相对于目标位置的位置变化量;
通过控制装置根据所述位置变化量对所述研磨装置的至少一部分施加作用力,以使所述指定点朝向所述目标位置移位。
10.根据权利要求9所述的方法,其特征在于,所述通过位置监测装置获取所述研磨装置上的指定点相对于目标位置的位置变化量包括:通过位置监测装置获取所述研磨装置的研磨轮或静压板上的指定点相对于目标位置的位置变化量;和/或
所述通过控制装置根据所述位置变化量对所述研磨装置的至少一部分施加作用力包括:通过控制装置根据所述位置变化量对所述研磨装置的用于支撑所述研磨轮或所述静压板的支撑杆施加作用力。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211098362.XA CN115723035A (zh) | 2022-09-08 | 2022-09-08 | 用于监控研磨装置的加工状态的系统、方法及双面研磨装置 |
| TW111141168A TWI826082B (zh) | 2022-09-08 | 2022-10-28 | 監控研磨裝置的加工狀態的系統、方法及雙面研磨裝置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202211098362.XA CN115723035A (zh) | 2022-09-08 | 2022-09-08 | 用于监控研磨装置的加工状态的系统、方法及双面研磨装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115723035A true CN115723035A (zh) | 2023-03-03 |
Family
ID=85293134
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211098362.XA Pending CN115723035A (zh) | 2022-09-08 | 2022-09-08 | 用于监控研磨装置的加工状态的系统、方法及双面研磨装置 |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN115723035A (zh) |
| TW (1) | TWI826082B (zh) |
Citations (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW490754B (en) * | 1998-10-30 | 2002-06-11 | Shinetsu Handotai Kk | Wafer polishing apparatus and method therefore |
| TW510843B (en) * | 1999-11-26 | 2002-11-21 | Sony Corp | Polishing apparatus and polishing method |
| CN1933940A (zh) * | 2004-03-19 | 2007-03-21 | Memc电子材料有限公司 | 用于双面研磨机的晶片夹持装置 |
| JP2007096000A (ja) * | 2005-09-29 | 2007-04-12 | Shin Etsu Handotai Co Ltd | 半導体ウェーハの製造方法 |
| US20100144248A1 (en) * | 2008-10-31 | 2010-06-10 | Sumco Techxiv Corporation | Double-side grinding apparatus for wafer and double-side grinding method |
| CN101939136A (zh) * | 2008-02-14 | 2011-01-05 | 信越半导体股份有限公司 | 工件的双面磨削装置及工件的双面磨削方法 |
| CN102844151A (zh) * | 2010-03-26 | 2012-12-26 | Memc电子材料有限公司 | 同时双面晶片研磨机中的流体静力垫压力调控 |
| TW201309423A (zh) * | 2011-04-15 | 2013-03-01 | Shinetsu Handotai Kk | 雙面磨削方法及雙面磨削裝置 |
| CN106041728A (zh) * | 2015-04-07 | 2016-10-26 | 光洋机械工业株式会社 | 薄板状工件的制造方法以及双头平面磨削装置 |
| JP2018015890A (ja) * | 2016-07-14 | 2018-02-01 | 株式会社荏原製作所 | 基板の表面を研磨する装置および方法 |
| CN111775001A (zh) * | 2020-07-30 | 2020-10-16 | 华海清科(北京)科技有限公司 | 用于控制晶圆磨削面形的磨削设备 |
| CN112008595A (zh) * | 2020-09-02 | 2020-12-01 | 珠海市中芯集成电路有限公司 | 一种晶圆研磨装置及研磨方法 |
| CN216399204U (zh) * | 2021-12-24 | 2022-04-29 | 西安奕斯伟材料科技有限公司 | 一种用于控制硅片研磨装置的变形的系统 |
| CN216542671U (zh) * | 2021-12-28 | 2022-05-17 | 西安奕斯伟材料科技有限公司 | 一种双面研磨装置 |
| CN114986381A (zh) * | 2022-06-16 | 2022-09-02 | 西安奕斯伟材料科技有限公司 | 双面研磨装置和双面研磨方法 |
| CN217371901U (zh) * | 2022-04-27 | 2022-09-06 | 西安奕斯伟材料科技有限公司 | 一种研磨轮、双面研磨装置及硅片 |
-
2022
- 2022-09-08 CN CN202211098362.XA patent/CN115723035A/zh active Pending
- 2022-10-28 TW TW111141168A patent/TWI826082B/zh active
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW490754B (en) * | 1998-10-30 | 2002-06-11 | Shinetsu Handotai Kk | Wafer polishing apparatus and method therefore |
| TW510843B (en) * | 1999-11-26 | 2002-11-21 | Sony Corp | Polishing apparatus and polishing method |
| CN1933940A (zh) * | 2004-03-19 | 2007-03-21 | Memc电子材料有限公司 | 用于双面研磨机的晶片夹持装置 |
| JP2007096000A (ja) * | 2005-09-29 | 2007-04-12 | Shin Etsu Handotai Co Ltd | 半導体ウェーハの製造方法 |
| CN101939136A (zh) * | 2008-02-14 | 2011-01-05 | 信越半导体股份有限公司 | 工件的双面磨削装置及工件的双面磨削方法 |
| US20110053470A1 (en) * | 2008-02-14 | 2011-03-03 | Shin-Etsu Handotai Co., Ltd. | Workpiece double-disc grinding apparatus and workpiece double-disc grinding method |
| US20100144248A1 (en) * | 2008-10-31 | 2010-06-10 | Sumco Techxiv Corporation | Double-side grinding apparatus for wafer and double-side grinding method |
| CN102844151A (zh) * | 2010-03-26 | 2012-12-26 | Memc电子材料有限公司 | 同时双面晶片研磨机中的流体静力垫压力调控 |
| TW201309423A (zh) * | 2011-04-15 | 2013-03-01 | Shinetsu Handotai Kk | 雙面磨削方法及雙面磨削裝置 |
| CN106041728A (zh) * | 2015-04-07 | 2016-10-26 | 光洋机械工业株式会社 | 薄板状工件的制造方法以及双头平面磨削装置 |
| JP2018015890A (ja) * | 2016-07-14 | 2018-02-01 | 株式会社荏原製作所 | 基板の表面を研磨する装置および方法 |
| CN111775001A (zh) * | 2020-07-30 | 2020-10-16 | 华海清科(北京)科技有限公司 | 用于控制晶圆磨削面形的磨削设备 |
| CN112008595A (zh) * | 2020-09-02 | 2020-12-01 | 珠海市中芯集成电路有限公司 | 一种晶圆研磨装置及研磨方法 |
| CN216399204U (zh) * | 2021-12-24 | 2022-04-29 | 西安奕斯伟材料科技有限公司 | 一种用于控制硅片研磨装置的变形的系统 |
| CN216542671U (zh) * | 2021-12-28 | 2022-05-17 | 西安奕斯伟材料科技有限公司 | 一种双面研磨装置 |
| CN217371901U (zh) * | 2022-04-27 | 2022-09-06 | 西安奕斯伟材料科技有限公司 | 一种研磨轮、双面研磨装置及硅片 |
| CN114986381A (zh) * | 2022-06-16 | 2022-09-02 | 西安奕斯伟材料科技有限公司 | 双面研磨装置和双面研磨方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI826082B (zh) | 2023-12-11 |
| TW202310974A (zh) | 2023-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101237960B (zh) | 精密加工设备和精密加工方法 | |
| KR101095605B1 (ko) | 폴리싱장치, 연결시트, 폴리싱 장치용 제어장치 및 폴리싱 방법 | |
| US9999956B2 (en) | Polishing device and polishing method | |
| EP2345505B1 (en) | Method for dressing a polishing pad | |
| US9108292B2 (en) | Method of obtaining a sliding distance distribution of a dresser on a polishing member, method of obtaining a sliding vector distribution of a dresser on a polishing member, and polishing apparatus | |
| US6468912B2 (en) | Methods and apparatuses for monitoring and controlling mechanical or chemical-mechanical planarization of microelectronic substrate assemblies | |
| US20060196283A1 (en) | Measurement of Thickness Profile and Elastic Modulus Profile of a Polishing Pad | |
| US6464824B1 (en) | Methods and apparatuses for monitoring and controlling mechanical or chemical-mechanical planarization of microelectronic substrate assemblies | |
| CN108369906B (zh) | 晶圆抛光方法及抛光装置 | |
| TW201210745A (en) | Closed-loop control for improved polishing pad profiles | |
| US5951368A (en) | Polishing apparatus | |
| KR19980018590A (ko) | 표면 교정 박판 보유지지 장치, 면 조정 수단 및 방향 조정 수단 | |
| US10753721B2 (en) | Threaded shaft measuring device, threaded shaft measuring method, and adjustment jig | |
| CN115365922B (zh) | 研磨轮、研磨设备及硅片 | |
| CN115723035A (zh) | 用于监控研磨装置的加工状态的系统、方法及双面研磨装置 | |
| JP2015023113A (ja) | 半導体基板の平坦化研削加工方法 | |
| CN114952594A (zh) | 抛光系统及用于工件的化学机械抛光的方法 | |
| CN116475934A (zh) | 静压垫、研磨设备及硅片 | |
| US11565369B2 (en) | Method of grinding workpiece | |
| JPH09193003A (ja) | 研磨装置 | |
| TWI834456B (zh) | 研磨輪、研磨設備及矽片 | |
| US20220134504A1 (en) | Wafer grinding method | |
| US20230249311A1 (en) | Surface irregularity reducing method and surface irregularity reducing apparatus | |
| US6402590B1 (en) | Carrier head with controllable struts for improved wafer planarity | |
| CN115383545A (zh) | 打磨装置及打磨方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| CB02 | Change of applicant information |
Address after: Room 1-3-029, No. 1888, Xifeng South Road, high tech Zone, Xi'an, Shaanxi 710065 Applicant after: Xi'an Yisiwei Material Technology Co.,Ltd. Address before: Room 1-3-029, No. 1888, Xifeng South Road, high tech Zone, Xi'an, Shaanxi 710065 Applicant before: Xi'an yisiwei Material Technology Co.,Ltd. |
|
| CB02 | Change of applicant information |