CN115530869A - 用于外科手术的轨迹引导装置 - Google Patents
用于外科手术的轨迹引导装置 Download PDFInfo
- Publication number
- CN115530869A CN115530869A CN202210485419.5A CN202210485419A CN115530869A CN 115530869 A CN115530869 A CN 115530869A CN 202210485419 A CN202210485419 A CN 202210485419A CN 115530869 A CN115530869 A CN 115530869A
- Authority
- CN
- China
- Prior art keywords
- sight
- trajectory
- surgical tool
- instrument
- surgical
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3403—Needle locating or guiding means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
- A61B10/025—Pointed or sharp biopsy instruments for taking bone, bone marrow or cartilage samples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/34—Trocars; Puncturing needles
- A61B17/3472—Trocars; Puncturing needles for bones, e.g. intraosseus injections
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/12—Devices for detecting or locating foreign bodies
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/10—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis
- A61B90/11—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges for stereotaxic surgery, e.g. frame-based stereotaxis with guides for needles or instruments, e.g. arcuate slides or ball joints
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B10/00—Other methods or instruments for diagnosis, e.g. instruments for taking a cell sample, for biopsy, for vaccination diagnosis; Sex determination; Ovulation-period determination; Throat striking implements
- A61B10/02—Instruments for taking cell samples or for biopsy
- A61B10/0233—Pointed or sharp biopsy instruments
- A61B10/025—Pointed or sharp biopsy instruments for taking bone, bone marrow or cartilage samples
- A61B2010/0258—Marrow samples
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3966—Radiopaque markers visible in an X-ray image
Abstract
本发明涉及一种可固定到用于与X射线机结合使用的外科手术工具的轨迹引导器械。更具体地,该装置包括射线可透外伸支架,其具有设置在其上的不透射线标记,使得该不透射线标记经X射线机是可见的,以提供用于器械的角度轨迹。外伸支架可固定到各种外科手术工具上,以便在手术期间向外科手术医生提供实时轨迹引导。一般来说,精确轨迹引导器械包括大致刚性的外伸支架装置,其针对轨迹引导可固定到外科手术工具的一部分。轨迹引导器械可以与夹子、紧固件、粘合剂、钩和环等附接。
Description
本申请是申请号为201580037623.9的分案申请。
技术领域
本发明涉及一种可固定到用于与X射线机结合使用的外科手术工具的轨迹引导器械。特别地,该装置包括射线可透外伸支架,其具有设置在其上的不透射线标记,该标记经X射线机是可见的,以提供用于器械的角度轨迹。
背景技术
涉及椎骨的医疗手术通常是复杂的,这是因为需要精确性和准确性以避免神经损伤和对主要血管的损伤。需要精确的深度引导器械来进行经皮脊柱手术。这些手术有时需要穿透椎骨的硬皮质骨并穿过位于其下的较软的松质骨。外科手术医生通常需要大的力来穿过皮质骨。一旦穿透皮质骨,就必须极其小心以避免快速穿透所有的松质骨。还存在快速通过松质骨然后穿过脊椎另一侧的皮质骨的危险。这会导致对脊柱和/或位于脊柱附近的其他器官或血管损伤或受损。在一些情况下,穿透皮质骨所需的力大于外科手术医生可用手施加的力。在这些情况下,需要锤子或其他类似的器械来迫使器械穿过皮质骨。当使用锤子或类似器械时,存在器械快速穿过松质骨并从椎骨的另一侧出来的更大危险。
发明内容
简言之,本发明涉及一种可固定到用于与X射线机结合使用的外科手术工具的轨迹引导器械。更具体地,该装置包括射线可透外伸支架,其具有设置在其上的不透射线标记,使得该不透射线标记经放射照相术例如X射线机是可见的,以提供用于器械的角度轨迹。外伸支架可固定到各种外科手术工具上,以便在手术期间向外科手术医生提供实时轨迹引导。一般来说,精确轨迹引导器械包括大致刚性的外伸支架装置,其可固定到外科手术工具的一部分用于轨迹引导。轨迹引导器械可以用夹子、紧固件、粘合剂、钩和环等附接。或者,轨迹引导器械可以永久地附设或整体形成到外科手术工具上。多于一个的轨迹引导器械可以固定到相同的外科手术工具上,或者轨迹引导器械可以围绕外科手术工具旋转以提供复合角轨迹。因此,本发明的目的是提供一种可用于为外科手术工具提供精确轨迹的轨迹引导器械。
本发明的另一个目的是提供一种轨迹引导器械,其可以固定到外科手术工具上,以向该工具插入到患者中提供精确轨迹。
本发明的另一个目的是提供一种轨迹引导器械,其可以固定到预先存在的外科手术工具,以向外科手术工具提供精确轨迹。
本发明的再一个目的是提供一种轨迹引导器械,其可以整体形成为外科手术工具的一部分,用于向外科手术工具提供轨迹引导。
本发明的又一个目的是提供一种轨迹引导器械,其可以相对于外科手术工具旋转,以向外科手术工具提供复合角轨迹。
本发明的又一个目的是提供一种特别适用于脊柱外科手术的轨迹引导器械,以提供进入椎骨的具有测量角度的轨迹,该测量角度和距离通过放射照相术预先确定。
本发明的又一个目的是提供一种轨迹引导器械,其可用于在任何数量的外科手术例如骨髓活检、脊柱植入物的放置、脊柱外科手术中确保期望的轨迹和/或对手术器械和/或植入物的轨迹的监控,包括在椎弓根固定手术期间确保椎弓根螺钉的正确放置,并且在建立到目标部位的手术通道期间确保适当的轨迹。
本发明的其他目的和优点从结合任何附图的以下描述中将变得显而易见,其中通过说明和示例的方式阐述了本发明的某些实施方案。本文包含的任何附图构成本说明书的一部分,包括本发明的示例性实施方案并且图示了本发明的多个目的和特征。
附图说明
通过阅读本说明书与附图相结合,本发明的许多优点对于本领域技术人员将是显而易见的,其中相同的附图标记适用于相同的元件,并且其中:
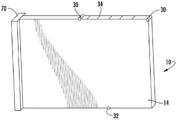
图1是用剑麻针(jamshidi needle)示出的器械的一个实施方案的侧视图和C臂型X射线装置的局部视图;
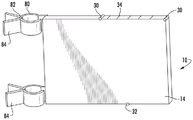
图2是器械的一个实施方案的俯视图,示出在X射线或荧光透视下的标记;
图3是外伸支架的一个实施方案的透视图;
图4是外伸支架的一个实施方案的透视图;
图5是外伸支架的一个实施方案的透视图;
图6是外伸支架的一个实施方案的透视图;
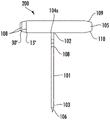
图7是本发明的一个实施方案的侧视图;
图8是图7所示的实施方案的局部视图;
图9是手术中图7所示的实施方案的局部放射照相图;
图10是人类脊柱的一部分的代表性示图;
图11是示出本发明的一个实施方案的侧视图;
图12是示出本发明的一个实施方案的侧视图;
图13是示出本发明的一个实施方案的侧视图;
图14是示出本发明的一个实施方案的侧视图;
图15A是示出本发明的操作的放射线图像;
图15B是示出本发明的操作的放射线图像;
图15C是示出本发明的操作的放射线图像;
图16A是示出本发明的一个实施方案的操作的放射线俯视图像;
图16B是在图16A中示出的放射线图像的侧视图;
图17A是示出本发明的一个实施方案的操作的端视图;
图17B是在图17A中示出的实施方案的透视图;
图18是本发明的另一实施方案的局部透视图;和
图19是本发明的一个实施方案的侧视图。
具体实施方案
尽管本发明容许多种形式的实施方案,在附图中示出并且在下文中将描述目前优选的实施方案,但本发明不限于此,应理解的是,本公开被认为是本发明的示例,并非意图将本发明限制于所示的具体实施方案。
为了提高外科手术的安全性和效率,描述了轨迹监控系统的多个实施方案和外科手术用途。在仅作为示例阐述的一个实施例中,本发明可以通过监控在导向孔形成和/或螺钉插入期间使用的各种外科手术器械的轴向轨迹来促进安全和可再现的椎弓根螺钉放置。在仅作为示例阐述的另一实施例中,可以通过监控成像设备的精确定向来提高术中成像性能并且使辐射暴露最小化。在另一个实施例中,监控外科手术进入器械的定向可有助于进入器械本身的插入和定位,以及有助于器械的稍后插入和/或植入物通过外科手术进入器械或与外科手术进入器械一起的稍后插入。应明确指出,这些实施例以举例的方式阐述;并且本发明可以适用于在任何数量的附加外科手术行动中使用,在这些行动中,器械和/或植入物的角定向或轨迹或深度(行进的线性距离)是重要的。仅作为示例,除了其他外,本发明可用来引导用于韧带或肌腱修复的通道(tunnel)的形成以及小面螺钉的放置。其他用途可包括在手术执行中所用的钻头、锯、切割器或其他手动工具的定向,其中特定的基准标记可能是有用的。
现参考图1-2,示出本发明的一个实施方案以及其可以组装的一种方式。相同的附图标记在各个附图中表示相同的部件。图1是示出了精确轨迹引导器械100的实施方案的示意图,该精确轨迹引导器械100在此处示出为固定到剑麻针40上的外伸支架10。器械10包括射线可透主体部分14,其具有形成前瞄准器30和后瞄准器32的不透射线标记18,为了防止对周围组织、神经、血管、软骨或骨骼的无意伤害,可以在放射照相术下将前瞄准器30和后瞄准器32对准。在放射照相术下标记18的可见性确保在任何数量的外科手术例如骨髓活检、脊柱植入物的放置、脊柱外科手术中精确的轨迹和/或对外科手术器械和/或植入物的轨迹的监控,包括在椎弓根固定手术期间确保椎弓根螺钉的放置,并且在建立到脊柱目标部位的手术通道期间确保适当的轨迹。同样是不透射线的例如后瞄准器32的轨迹标记19被提供用于确定角度关系并且在前瞄准器30之间的水平或垂直平面中对准。标记18还可以包括至少一个参考轨迹瞄准器34,其指示前瞄准器30之间不同度数的刻度。在一些实施方案中,标记18可以被压印、印刷、涂漆、嵌入或以其他方式印在贴纸、夹子或支架上。用于该标记的不透射线材料可以包括已知为不透射线的几种金属中的一种,例如但不限于铅、钽、钨、金、不锈钢等。或者,标记可以是不透射线的聚合物;这样的聚合物可以商品名LATIGRAY获自意大利的LATI工厂热可塑S.p.A.(LATI Industries Thermoplasici S.p.A.),并且可以直接粘附或模制到外伸支架中。
仅作为示例,在将骨螺钉穿过椎弓根42(其通常是将椎骨44的后部结构连接到椎体的小的管状结构)放置时,关键是确保螺钉包含在椎弓根内并且不破坏外椎弓根壁。由于椎弓根42被脆弱的神经组织包围,所以该破坏可给患者带来严重的后果,从轻度疼痛到瘫痪。针对在螺钉放置期间(包括螺钉放置的准备,例如导向孔形成和攻丝)减轻椎弓根破坏风险的一种方法是确定椎弓根的角度定向,然后沿着确定的轨迹推进必要的器械和螺钉。通过沿着椎弓根轨迹定向外科手术进入部件,外科手术器械和椎弓根螺钉可以沿着相同的轨迹简单有效地前进,并且因此通过与进入部件的“眼球”对准而避免了破坏。
因此,在脊柱手术中,在用剑麻针40形成导向孔之前,必须首先确定期望的角度轨迹。一旦将与外伸支架10组合的剑麻针40放置在要进行手术的解剖部位时,即利用AP荧光透视、MRI或CAT扫描成像装置20的术前上视图确定轨迹。C臂荧光镜在许多外科手术中广泛使用。例如在脊柱手术期间,C臂经常用于帮助定位脊柱的特定结构,以引导外科手术器械和/或器械的定位,并验证椎骨的正确对准和高度,以及其他用途。诸如C臂的成像装置通常设有相对于患者指示放射照相束24的定向的刻度(未示出),因此在本示例中为与外伸支架10组合的剑麻针40。以这种方式,成像装置20可以以已知的角度引导放射照相束24穿过外伸支架10,使得标记18在所得图像20(图2)中变得可见。如图2所示,例如前瞄准器30的标记18可以与后瞄准器32组合观察,以限定在前瞄准器30之间可见的期望角度的外边界。可以改变前瞄准器30之间的间隔,以提供任何期望的角度指示范围。还应当注意,尽管仅示出了两个前瞄准器30,但是可以提供任何数量的参考轨迹瞄准器34以指示角度或角度的部分而不背离本发明的范围。参照图13、15、16和17,其示出了具有至少三个不同的角度指示器的实施方案。以这种方式,对诸如脊柱的手术,其中冠状(内侧)角26相对于从L1到骶骨的中心线28(图10)每个水平增加约5度,可以提供多个前瞄准器30或参考轨迹瞄准器34,由此外科手术医生可以针对脊柱的每个水平使用不同的前瞄准器30或参考轨迹瞄准器34。在一些实施方案中,前瞄准器30、后瞄准器32和参考轨迹瞄准器34可以包括不同的形状,包括但不限于数字、字母、2D和3D几何形状等,以指示不同的角度、视野或参考视野。当观察外伸支架10时,标记18可以肉眼可见或可以不是肉眼可见的。还应当注意,尽管本公开描述了一种剑麻针,但是在不背离本发明的范围的情况下本公开的教导可以应用于其他类型的外科手术工具。例如,用于外科手术操作的钻头、锯、铰刀、成形器和其他手动工具可以从本发明的教导中受益。此外,本发明的教导可以用于植入各种植入物、导管、镜等而不背离本发明的范围。还应当注意,虽然本实施方案的外伸支架10被示出为附接至外科手术工具,但是,在不背离本发明的范围的情况下,本装置的教导还可以用作永久固定或一体形成外科手术工具的一部分。
参照图1和图3,示出了外伸支架10的一个实施方案。在该实施方案中,外伸支架的射线可透的主体部分14设有用于附接到诸如剑麻针40的外科手术工具的管部分50。管部分50包括尺寸设置成围绕轴46延伸的内腔52。可以利用拇指螺丝54、摩擦等将外伸支架保持在轴46上或通常为圆形的外科手术工具的任何其他部分上的适当位置。这种结构还允许外伸支架10根据需要围绕外科手术工具旋转,并且在不同平面中进行附加的放射照相拍摄,由此可以由装置指示复合角等。
参照图1、4和5,示出了外伸支架10的一个实施方案。在该实施方案中,外伸支架的射线可透的主体部分14设有用于附接到外科手术工具的突片部分60或垂直突片部分70。突片部分60、70包括用于容易地附接至外科手术工具的表面的粘合剂62等以及粘合盖64。这种结构还允许外伸支架10根据需要固定至外科手术工具。
参照图1和图6,示出了外伸支架10的一个实施方案。在该实施方案中,外伸支架的射线可透的主体部分14设有用于附接至外科手术工具的夹子80。夹子80包括用于容易地附接至外科手术工具的表面的弹簧构件82等以及杠杆84。这种结构还允许根据需要将外伸支架10固定至外科手术工具的一部分,在该部分中夹子将膨胀得足够大以至少部分地围绕其配合。
现参照图7-9、11-14,示出了本发明的一个实施方案及其构造的方式。图7是示出精确深度和轨迹引导器械200的实施方案的示意图。器械200包括大致刚性的插管101,其包括第一端102和第二端103,所述第一端包括用于固定到手柄105上的紧固装置或螺纹构件104a,所述第二端包括用于穿入患者的皮肤和组织的尖端106。手柄105固定到插管101的第一端102。手柄可以通过包括二次成型或可被可拆卸地移除的各种手段固定至插管。在手柄105被可拆卸地移除的实施方案中,如图2所示,手柄包括下部、套环(collar)或圆柱部107,其包括紧固装置,紧固装置可包括但不限于卡口安装、锥形锁定、粘合件或螺纹构件104b,其被构造和布置成与插管101的紧固装置或螺纹构件104a配合用于可移除地附接至插管。该下部、套环或圆柱部107被固定式地固定至插管101。
手柄105可以永久地或可拆卸地附接至插管101,并且可以成形和尺寸化为多种合适变型中的任何一种。在其中插管101是剑麻型针的一些实施方案中,手柄105优选具有可以舒适地配合外科手术医生或医疗技术人员的手中的人体工程学形状。手柄可以成形为包括上弯曲部分109,其被成形为符合人的手掌。手柄110的下部也是弯曲的。手柄的下部的曲线被设计成由人的手指抓握以帮助控制插管101。手柄105用于驱动插管进入椎骨并且有时穿过椎骨的骨骼。有时,插管101可以仅通过使用由人的手施加的压力来驱动其穿过骨骼。其他时候,必须使用锤子或其他器械来驱动插管101穿过骨骼。存在这样的风险,即当使用锤子或类似器械时,剑麻型针插管101将过远地进入椎骨。这可能会对附近的神经造成损伤。有时,针完全穿过椎骨并损伤邻近的血管或内部器官。
为了防止对周围组织、神经、血管、软骨或骨骼的无意伤害,标记108设置在手柄105上。标记108确保在任何数量的外科手术例如骨髓活检、脊柱植入物的放置、脊柱手术中精确的轨迹和/或对手术器械和/或植入物的轨迹和/或深度的监控,包括在椎弓根固定手术期间确保椎弓根螺钉的正确放置,以及在建立到脊柱目标部位的手术通道期间确保适当的轨迹。用于确定角度关系的轨迹标记在轨迹标记和插管的尖端之间的水平或垂直平面中对准。标记108还可以包括至少一个参考轨迹标记120(图14)。参考标记提供指示如果被驱动进一步进入目标部位的预定距离时工具的尖端将在何处的参考点或区域。在一些实施方案中,标记108可以被压印、印刷、嵌入或以其他方式印在贴纸或夹子上。在其他实施方案中,标记被蚀刻或电镀到手柄中。在一些实施方案中,手柄包括用于容纳通用夹子的附接的切口区域,通用夹子包括用于轨迹和深度的标记。应当注意,虽然本公开描述了一种剑麻针,但是在不背离本发明的范围的情况下本公开的教导可以应用于其他类型的外科手术工具。例如,用于外科手术操作的钻头、锯、铰刀、成形器和其他手动工具可以从本发明的教导中受益。
参照图11-14,在一些实施方案中,轨迹标记包括30度标记、15度标记或它们之间的组合。在剑麻针的情况下,轨迹标记在外科手术工具上的定位将根据插管的尺寸而变化。例如,指示30度角122的标记将标示在15厘米长的插管101的距手柄的相对端124的8.66cm处。当从顶部观察时,标示30度角122的标记与插管101的尖端106对准,以提供用于外科手术器械的轨迹。对于长度为10cm的插管,30度标记将在距手柄中心5.77cm处。类似地,标示行进距离的标记设置在套环和/或插管上。
因此,在形成导向孔之前,必须首先确定期望的角度轨迹。一旦将器械放置在要进行手术的解剖部位,即利用AP荧光透视、MRI或CAT扫描图像的术前上视图来确定轨迹。轨迹线21从器械的尖端绘制到适当的标记。参考线是插管。轨迹线与参考线之间的所得角度是用于形成导向孔的期望角度。用于预先确定椎弓根角度的替代和/或附加方法也被考虑并且可被使用而不偏离本发明的范围。如本文所使用的,导向孔的形成意在包括在皮肤、组织、骨骼等中产生孔(例如,仅通过锥子、钻子、钻头等)并制备预先形成的孔(例如,仅通过敲击孔)的任何一个或任何组合。
参照图9、14-17所示,外科手术医生或医疗技术人员也非常难以判断外科手术器械穿入椎骨或其他解剖特征结构的深度。该问题的补救措施在于本发明。首先,将轨迹和深度器械放置在要进行外科手术的解剖部位,并且拍摄正进行手术的椎骨的放射照相图像(图9、16和17)。因此在手术之前确定外科手术医生想要将器械或装置穿入椎骨中的轨迹和深度,从而允许精确的手术通道。因此,在另一个实施方案中,将指示插管深度的线性距离的深度标记120设置在解剖结构中。例如,对于投影的20mm前进点,深度标记将在距角度参考标记9.815cm处(图14)。
在另一个实施方案中,一种确定用于安全地接近患者的椎弓根的最佳角度轨迹和线性深度的方法包括以下步骤:将深度和轨迹引导器械定位在患者皮肤表面上的期望穿入部位。例如,在图9中,为了选择用于穿入椎弓根201的起始点,可以将器械放置在目标椎弓根的轨迹横向位置。包括设置在手柄和/或插管101上用于轨迹和线性深度引导的标记108的器械允许通过将轨迹标记与尖端106对准而使器械沿着期望的轨迹定向并且使器械相对于患者的解剖图像成像,以确定最佳的外科手术轨迹和深度通道(图9)。
参照图18,示出了本发明的替代实施方案。在这个实施方案中,可以提供本装置的气泡水平仪配置200,其可以夹在剑麻针的手柄上,或者可选地包括在手柄内,以便确保器械轨迹在外科手术期间不偏离并且角度精确。气泡水平仪装置包括具有安装在其中的牛眼水平仪202的手柄。当手柄放置在平坦表面上时,指示器环204应环绕被捕获在玻璃208内的气泡206。当气泡在第一指示器环204内时,显示器应读取大约零度。附加环210将指示该角度。例如,10、20和30度指示器环210应环绕被捕获在玻璃内的气泡206。当气泡水平仪为用于轴向对准工具的圆形时,还可以提供一对平行线212。在替代实施方案(未示出)中,气泡水平仪可以是其上印有度数指示器的弯曲细长管。水平仪内的指示器和流体可以被构造为在辐射下可视化,由此外科手术医生可以通过荧光透视等读取装置。
参照图19,示出了精确引导器械300的替代实施方案。精确引导器械300在此处示为固定到剑麻针40的外伸支架310。外伸支架310包括不透射线的主体部分314,其具有形成至少一个更优选地一对后瞄准器32的不透射线标记18,为了防止对周围组织、神经、血管、软骨或骨骼的无意伤害,在放射照相术之下将后瞄准器32与外科手术工具的部分(此处示出为剑麻针的点106)对准。在放射照相术下标记18的可见性确保在任何数量的外科手术例如骨髓活检、脊柱植入物的放置、脊柱外科手术中精确的轨迹和/或对外科手术器械和/或植入物的轨迹的监控,包括在椎弓根固定手术期间确保椎弓根螺钉的正确放置并且在建立到脊柱目标部位的手术通道期间确保适当的轨迹。还提供了不透射线的轨迹标记19,用于确定外科手术工具到达其预期目的地的路径。标记18还可以包括至少一个参考轨迹瞄准器34,其指示前瞄准器30之间不同度数的刻度。在一些实施方案中,标记18可以被压印、印刷、涂漆、嵌入或以其他方式印在标签、夹子或外伸支架上。
本说明书中提及的所有专利和出版物都指示本发明所属领域的技术人员的水平。所有专利和出版物以每个单独出版物被具体和单独地通过引用并入的程度通过引用并入本文中。
应当理解,尽管示出了本发明的某种形式,但是本发明不限于本文所描述和示出的具体形式或布置。在不背离本发明的范围的情况下可以进行各种改变,这对于本领域技术人员是显而易见的,并且本发明不应被视为限于在本文包括的说明书和任何附图/图中所示出和描述的内容。
本领域技术人员将容易地理解,本发明非常适于实现目的并获得所提及的结果和优点,以及其中固有的那些优点。本文描述的实施方案、方法、手术和技术是目前优选实施方案的代表,旨在说明并不意图限制范围。本领域技术人员将会想到其中的改变和其他用途,这些改变和其他用途包括在本发明的精神内并且由所附权利要求的范围限定。虽然已经结合具体的优选实施方案描述了本发明,但是应当理解,所要求保护的本发明不应该不适当地限于这些具体实施方案。实际上,对本领域技术人员显而易见的为实施本发明所描述的模式的各种修改意图涵盖在所附权利要求的范围内。
Claims (24)
1.一种用于与外科手术工具结合使用的精确轨迹引导器械,其需要用于将所述外科手术工具引导到外科手术目标部位的X射线成像,包括:
具有射线可透主体的精确轨迹引导器械,所述射线可透主体被构造成附接至所述外科手术工具上,以形成通往所述手术目标部位的手术通道,所述精确轨迹引导器械固定在所述外科手术工具上的位置和方向,使得与所述X射线成像相关的X射线以已知角度穿过所述射线可透主体,所述射线可透主体包括至少一个由不透射线材料构成的前瞄准器和至少一个由不透射线材料构成的后瞄准器,所述至少一个前瞄准器和所述至少一个后瞄准器定位在所述射线可透的主体上,所述至少一个前瞄准器定位在第一平面上,而所述至少一个后瞄准器定位在和所述第一平面隔开的第二平面上,以便在射线照相下所述第二瞄准器相对于第一瞄准器是可视的,以提供所述射线可透主体的角度关系,从而在所述前瞄准器和所述后瞄准器通过射线照相图像透视时,提供所述外科手术工具相对于动物解剖结构的一部分的角度轨迹,其中所述角度轨迹是在穿透骨头以形成所述手术通道之前确定的。
2.根据权利要求1所述的精确轨迹引导器械,其中所述射线可透主体是一个带有用于连接所述手术工具的夹子的外伸支架。
3.根据权利要求1所述的精确轨迹引导器械,其中所述射线可透主体的外伸支架设有粘贴部分,所述粘贴部分包括粘贴到手术工具上的粘贴剂。
4.一种精确轨迹引导器械,包括:
外科手术工具,其包括刚性的插管,所述插管包括第一端和第二端,所述第一端固定到手柄构件,所述第二端包括用于穿入动物皮肤和组织的锐利尖端,射线可透主体固定到所述外科手术工具上,所述射线可透主体固定在所述外科手术工具上的位置和方向,使得与所述X射线成像相关的X射线以已知角度穿过所述射线可透主体,所述射线可透主体包括至少一个由不透射线材料构成的前瞄准器至少一个和由不透射线材料构成的后瞄准器,所述至少一个前瞄准器和所述至少一个后瞄准器彼此之间以垂直间隔的关系定位在所述射线可透主体上,当通过X射线图像透视时以提供所述射线可透主体的角度关系,其中所述第二瞄准器相对于第一瞄准器在X射线图像中是可视的,从而在穿透组织以形成所述手术通道之前提供所述外科手术工具相对于动物解剖结构的一部分的角度轨迹。
5.根据权利要求4所述的精确轨迹引导器械,其中所述射线可透主体固定至所述插管。
6.根据权利要求4所述的精确轨迹引导器械,其中所述射线可透主体固定至所述手柄构件。
7.根据权利要求4所述的精确轨迹引导器械,其中所述手柄可从所述插管移除。
8.根据权利要求4所述的精确轨迹引导器械,其中所述射线可透主体整体地形成为所述外科手术工具的一部分。
9.一种用于与外科手术工具结合使用的精确轨迹引导器械,其需要将所述外科手术工具引导到外科手术目标部位的X射线成像,包括:
具有主体的精确轨迹引导器械,所述主体被构造成附接至所述外科手术工具的位置和方向,使得与所述X射线成像相关的X射线以已知角度穿过所述主体,所述主体包括至少一个由不透射线材料构成的前瞄准器和至少一个由不透射线材料构成的后瞄准器,所述至少一个前瞄准器和所述至少一个后瞄准器定位在所述主体上垂直间隔分开,当通过X射线图像透视时以提供所述主体的角度关系,从而所述一个前瞄准器准器相对于所述至少一个后瞄准器是可视的,并由此确定所述外科手术工具相对于动物解剖结构的一部分的角度轨迹,所述角度轨迹在形成所述手术通道之前是可确定的。
10.根据权利要求9所述的精确轨迹引导器械,其中所述主体由不透射线材料形成。
11.根据权利要求9所述的精确轨迹引导器械,其中所述主体由射线可透材料形成。
12.根据权利要9所述的精确轨迹引导器械,其中所述主体由不透射线材料和射线可透材料的组合形成。
13.根据权利要9所述的精确轨迹引导器械,其中所述前瞄准器是所述外科手术工具的一部分,所述后瞄准器由所述主体提供。
14.根据权利要求9所述的精确轨迹引导器械,其中所述后瞄准器是所述外科手术工具的一部分,所述前瞄准器由所述主体提供。
15.根据权利要9所述的精确轨迹引导器械,其中所述前瞄准器和所述后瞄准器形成为所述外科手术工具的一部分。
16.根据权利要求1,4或9所述的精确轨迹引导器械,其包括多个所述后瞄准器,通过将多个所述后瞄准器与所述至少一个前瞄准器对准,以提供所述工具相对于所述X射线图像中可见的动物解剖结构的一部分的轴向对准和角度对准。
17.根据权利要求16所述的精确轨迹引导器械,其中多个所述后瞄准器之间的间隔被配置为提供角度指示的预定范围。
18.根据权利要求16所述的精确轨迹引导器械,其中各个所述后瞄准器都包括不同的几何形状。
19.根据权利要求1,4或9所述的精确轨迹引导器械,其中所述外科手术工具是剑麻针,所述精确轨迹引导器械作为从剑麻针的插管部分向外延伸并大致垂直于其的外伸支架固定至所述剑麻针。
20.根据权利要求19所述的精确轨迹引导器械,其中所述外伸支架包括射线可透主体部分,所述射线可透主体设有管部分,所述管部分具有尺寸设置成围绕所述剑麻针的管腔延伸的内腔。
21.根据权利要求20所述的精确轨迹引导器械,其中所述外伸支架围绕所述管腔旋转。
22.根据权利要求19所述的精确轨迹引导器械,其包括沿所述剑麻针套管部分的长度方向固定的至少一个深度标记。
23.根据权利要求19所述的精确轨迹引导器械,其中所述前瞄准器是所述剑麻针的尖端。
24.根据权利要求9所述的精确轨迹引导器械,其中,所述至少一个由不透射线的材料构造的前瞄准器和至少一个由不透射线的材料构造的后瞄准器被构造和布置成为所述手术工具提供投影深度。
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462002734P | 2014-05-23 | 2014-05-23 | |
| US62/002,734 | 2014-05-23 | ||
| US201462059455P | 2014-10-03 | 2014-10-03 | |
| US62/059,455 | 2014-10-03 | ||
| PCT/US2015/032235 WO2015183747A2 (en) | 2014-05-23 | 2015-05-22 | Trajectory guidance device and system for surgical instruments |
| CN201580037623.9A CN106999168A (zh) | 2014-05-23 | 2015-05-22 | 用于外科手术的轨迹引导装置 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580037623.9A Division CN106999168A (zh) | 2014-05-23 | 2015-05-22 | 用于外科手术的轨迹引导装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115530869A true CN115530869A (zh) | 2022-12-30 |
Family
ID=54427827
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210485419.5A Pending CN115530869A (zh) | 2014-05-23 | 2015-05-22 | 用于外科手术的轨迹引导装置 |
| CN201580037623.9A Pending CN106999168A (zh) | 2014-05-23 | 2015-05-22 | 用于外科手术的轨迹引导装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580037623.9A Pending CN106999168A (zh) | 2014-05-23 | 2015-05-22 | 用于外科手术的轨迹引导装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US10687845B2 (zh) |
| EP (1) | EP3145415A2 (zh) |
| JP (1) | JP6511517B2 (zh) |
| CN (2) | CN115530869A (zh) |
| AU (1) | AU2015267251B2 (zh) |
| WO (1) | WO2015183747A2 (zh) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11896446B2 (en) | 2012-06-21 | 2024-02-13 | Globus Medical, Inc | Surgical robotic automation with tracking markers |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US10799298B2 (en) | 2012-06-21 | 2020-10-13 | Globus Medical Inc. | Robotic fluoroscopic navigation |
| US11974822B2 (en) | 2012-06-21 | 2024-05-07 | Globus Medical Inc. | Method for a surveillance marker in robotic-assisted surgery |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US10624710B2 (en) | 2012-06-21 | 2020-04-21 | Globus Medical, Inc. | System and method for measuring depth of instrumentation |
| US11317971B2 (en) | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| US10874466B2 (en) | 2012-06-21 | 2020-12-29 | Globus Medical, Inc. | System and method for surgical tool insertion using multiaxis force and moment feedback |
| US11253327B2 (en) | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| US11786324B2 (en) | 2012-06-21 | 2023-10-17 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US20190000571A1 (en) * | 2012-06-21 | 2019-01-03 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11793570B2 (en) | 2012-06-21 | 2023-10-24 | Globus Medical Inc. | Surgical robotic automation with tracking markers |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| JP6511517B2 (ja) | 2014-05-23 | 2019-05-15 | インテグリティ インプランツ インコーポレイテッド | 手術器具用の軌道誘導デバイス及びシステム |
| US11883217B2 (en) | 2016-02-03 | 2024-01-30 | Globus Medical, Inc. | Portable medical imaging system and method |
| CN106137335A (zh) * | 2016-07-15 | 2016-11-23 | 于海龙 | 一种胸腰椎经皮穿刺装置及其使用方法 |
| JP6417487B1 (ja) * | 2018-01-12 | 2018-11-07 | 浩太 須田 | 穿刺器具ガイド装置 |
| US11259880B1 (en) | 2018-01-25 | 2022-03-01 | Integrity Implants Inc. | Guiding the trajectory of a second surgical device |
| EP3666212A1 (en) * | 2018-12-14 | 2020-06-17 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| JP7211582B1 (ja) | 2021-08-31 | 2023-01-24 | 慶應義塾 | 穿刺用プローブ |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3205404A1 (de) * | 1982-02-16 | 1983-09-15 | Patrick Dr.med. 3590 Bad Wildungen Kluger | Vorrichtung zum kontrollieren des richtungsgenauen fuehrens eines chirurgischen werkzeuges |
| US6036696A (en) * | 1997-12-19 | 2000-03-14 | Stryker Technologies Corporation | Guide-pin placement device and method of use |
| DE19956814B4 (de) * | 1999-11-25 | 2004-07-15 | Brainlab Ag | Formerfassung von Behandlungsvorrichtungen |
| US8523919B2 (en) * | 2010-09-27 | 2013-09-03 | Acumed Llc | Targeting guide with a radiopaque marker to facilitate positioning a bone plate on bone |
| US20030208202A1 (en) * | 2002-05-04 | 2003-11-06 | Falahee Mark H. | Percutaneous screw fixation system |
| US7406775B2 (en) * | 2004-04-22 | 2008-08-05 | Archus Orthopedics, Inc. | Implantable orthopedic device component selection instrument and methods |
| US20060217731A1 (en) * | 2005-03-28 | 2006-09-28 | Sdgi Holdings, Inc. | X-ray and fluoroscopic visualization slots |
| JP2007105392A (ja) * | 2005-10-17 | 2007-04-26 | Homuzu Giken:Kk | 手術用案内器具セット |
| US9826992B2 (en) * | 2007-12-21 | 2017-11-28 | Smith & Nephew, Inc. | Multiple portal guide |
| JP4231540B1 (ja) * | 2008-04-23 | 2009-03-04 | 浩太 須田 | 穿孔器具ガイド装置及び穿孔装置 |
| US8758383B2 (en) * | 2011-03-01 | 2014-06-24 | Safe Wire Holding, Llc | Depth controlled Jamshidi needle |
| BR112013024743A2 (pt) | 2011-03-28 | 2016-12-27 | Amendia Inc | guia de broca pedicular para cirurgia da coluna |
| JP6305333B2 (ja) * | 2012-05-31 | 2018-04-04 | サンエー精工株式会社 | 骨折治療用手術器具用センターガイド及び該ガイドを含む骨折治療用手術器具 |
| WO2014005225A1 (en) * | 2012-07-03 | 2014-01-09 | 7D Surgical Inc. | Attachments for tracking handheld implements |
| JP6511517B2 (ja) | 2014-05-23 | 2019-05-15 | インテグリティ インプランツ インコーポレイテッド | 手術器具用の軌道誘導デバイス及びシステム |
-
2015
- 2015-05-22 JP JP2017514388A patent/JP6511517B2/ja not_active Expired - Fee Related
- 2015-05-22 AU AU2015267251A patent/AU2015267251B2/en not_active Ceased
- 2015-05-22 CN CN202210485419.5A patent/CN115530869A/zh active Pending
- 2015-05-22 WO PCT/US2015/032235 patent/WO2015183747A2/en active Application Filing
- 2015-05-22 EP EP15790705.6A patent/EP3145415A2/en not_active Withdrawn
- 2015-05-22 US US15/313,463 patent/US10687845B2/en active Active
- 2015-05-22 CN CN201580037623.9A patent/CN106999168A/zh active Pending
-
2020
- 2020-05-13 US US15/931,061 patent/US11701142B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015183747A2 (en) | 2015-12-03 |
| AU2015267251A1 (en) | 2017-01-19 |
| CN106999168A (zh) | 2017-08-01 |
| US20170189058A1 (en) | 2017-07-06 |
| WO2015183747A3 (en) | 2016-04-21 |
| EP3145415A2 (en) | 2017-03-29 |
| AU2015267251B2 (en) | 2019-09-26 |
| JP2017524487A (ja) | 2017-08-31 |
| US10687845B2 (en) | 2020-06-23 |
| JP6511517B2 (ja) | 2019-05-15 |
| US11701142B2 (en) | 2023-07-18 |
| US20200268409A1 (en) | 2020-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11701142B2 (en) | Trajectory guidance device and system for surgical instruments | |
| US9402641B2 (en) | Pedicle drill guide for spinal surgery | |
| US10952751B2 (en) | Surgical targeting systems and methods | |
| US20100087823A1 (en) | Pedicle preparation device to assist implantation of pedicle screws | |
| US20100023018A1 (en) | Spinous process fixated bilateral drilling guide | |
| US20070276397A1 (en) | Method for improving pedicles screw placement in spinal surgery | |
| US20210169504A1 (en) | Surgical targeting systems and methods | |
| US11701181B2 (en) | Systems, instruments and methods for surgical navigation with verification feedback | |
| WO2005065337A2 (en) | Apparatus and method for guiding a medical device in multiple planes | |
| EP3316786B1 (en) | Fiber-optical realshape sensing for fluoroscopic surgical navigation | |
| JP2007105392A (ja) | 手術用案内器具セット | |
| US20230110238A1 (en) | Surgical device for insertion of guide wire and pedicle screw | |
| US20230097125A1 (en) | Robotically guiding the trajectory of a second surgical device | |
| US11896243B2 (en) | Surgical tool guide | |
| Merloz et al. | Computer-assisted versus manual spine surgery: clinical report | |
| CN102100580A (zh) | 髓内固定导向器 | |
| US20130066205A1 (en) | Ultrasound bone imaging assembly |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |