CN115076045A - 用于在旋转轴的联接器中检测实际滑动的系统和方法 - Google Patents
用于在旋转轴的联接器中检测实际滑动的系统和方法 Download PDFInfo
- Publication number
- CN115076045A CN115076045A CN202210244424.7A CN202210244424A CN115076045A CN 115076045 A CN115076045 A CN 115076045A CN 202210244424 A CN202210244424 A CN 202210244424A CN 115076045 A CN115076045 A CN 115076045A
- Authority
- CN
- China
- Prior art keywords
- sensor signals
- computer
- coupling
- implemented model
- actual slip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000008878 coupling Effects 0.000 title claims abstract description 86
- 238000010168 coupling process Methods 0.000 title claims abstract description 86
- 238000005859 coupling reaction Methods 0.000 title claims abstract description 86
- 238000000034 method Methods 0.000 title claims abstract description 85
- 238000012544 monitoring process Methods 0.000 claims abstract description 15
- 230000009471 action Effects 0.000 claims abstract description 9
- 230000004044 response Effects 0.000 claims abstract description 9
- 238000012549 training Methods 0.000 claims description 52
- 238000012360 testing method Methods 0.000 claims description 43
- 238000004422 calculation algorithm Methods 0.000 claims description 28
- 230000008859 change Effects 0.000 claims description 18
- 230000006870 function Effects 0.000 claims description 10
- 238000007619 statistical method Methods 0.000 claims description 10
- 230000001133 acceleration Effects 0.000 claims description 9
- 238000012545 processing Methods 0.000 description 9
- 238000012546 transfer Methods 0.000 description 7
- 238000005259 measurement Methods 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 4
- 238000013473 artificial intelligence Methods 0.000 description 3
- 238000010801 machine learning Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 239000013598 vector Substances 0.000 description 3
- 238000001514 detection method Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000009977 dual effect Effects 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 239000003550 marker Substances 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- 238000011179 visual inspection Methods 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
- G01M13/02—Gearings; Transmission mechanisms
- G01M13/022—Power-transmitting couplings or clutches
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D17/00—Monitoring or testing of wind motors, e.g. diagnostics
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D15/00—Transmission of mechanical power
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D7/00—Controlling wind motors
- F03D7/02—Controlling wind motors the wind motors having rotation axis substantially parallel to the air flow entering the rotor
- F03D7/04—Automatic control; Regulation
- F03D7/042—Automatic control; Regulation by means of an electrical or electronic controller
- F03D7/043—Automatic control; Regulation by means of an electrical or electronic controller characterised by the type of control logic
- F03D7/046—Automatic control; Regulation by means of an electrical or electronic controller characterised by the type of control logic with learning or adaptive control, e.g. self-tuning, fuzzy logic or neural network
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03D—WIND MOTORS
- F03D80/00—Details, components or accessories not provided for in groups F03D1/00 - F03D17/00
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/0265—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric the criterion being a learning criterion
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
- G06F30/20—Design optimisation, verification or simulation
- G06F30/27—Design optimisation, verification or simulation using machine learning, e.g. artificial intelligence, neural networks, support vector machines [SVM] or training a model
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/40—Transmission of power
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2260/00—Function
- F05B2260/84—Modelling or simulation
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/30—Control parameters, e.g. input parameters
- F05B2270/309—Rate of change of parameters
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05B—INDEXING SCHEME RELATING TO WIND, SPRING, WEIGHT, INERTIA OR LIKE MOTORS, TO MACHINES OR ENGINES FOR LIQUIDS COVERED BY SUBCLASSES F03B, F03D AND F03G
- F05B2270/00—Control
- F05B2270/80—Devices generating input signals, e.g. transducers, sensors, cameras or strain gauges
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E10/00—Energy generation through renewable energy sources
- Y02E10/70—Wind energy
- Y02E10/72—Wind turbines with rotation axis in wind direction
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- General Physics & Mathematics (AREA)
- Software Systems (AREA)
- Medical Informatics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Automation & Control Theory (AREA)
- Computer Hardware Design (AREA)
- Geometry (AREA)
- Fuzzy Systems (AREA)
- Mathematical Physics (AREA)
- Wind Motors (AREA)
- Control Of Transmission Device (AREA)
Abstract
一种用于检测例如风力涡轮功率系统中的旋转轴的耦合中的实际滑动的方法包括针对故障经由控制器监测与联接器有关的多个传感器信号。响应于检测到与联接器相关的多个传感器信号中的故障,该方法包括经由控制器使用一个或多个分类参数来确定故障是指示联接器的实际滑动还是无滑动事件。当故障指示实际滑动时,该方法包括经由控制器使用多个传感器信号和实际滑动的持续时间来估计实际滑动的幅度。此外,该方法包括经由控制器基于联接器中的实际滑动的幅度来实施控制动作。
Description
技术领域
本公开一般涉及风力涡轮功率系统,并且更特别地涉及用于检测风力涡轮功率系统的联轴器(shaft coupling)中的实际滑动并且因此拒绝无滑动事件的系统和方法。
背景技术
风功率被认为是目前可获得的最清洁、对环境最友好的能源之一,并且风力涡轮在这方面得到了越来越多的关注。现代风力涡轮通常包括塔架、发电机、齿轮箱、机舱(nacelle)和转子。转子通常包括可旋转毂(hub),其具有附接于此的一个或多个转子叶片。俯仰(pitch)轴承通常可操作地配置在毂和转子叶片之间以允许围绕俯仰轴线旋转。该转子叶片使用已知的翼型件原理捕获来自风的动能,并且通过旋转能传输动能,以便转动轴,该轴将转子叶片耦合到齿轮箱,或者如果不使用齿轮箱,则该轴将转子叶片直接地耦合到发电机。发电机然后将机械能转换为可部署到公用电网的电能。
更特别地,在某些风力涡轮中,毂经由转子轴(有时称为主轴或低速轴),齿轮箱,高速轴和联接器(coupling)可旋转地耦合到发电机。因此,转子轴的旋转可旋转地驱动齿轮箱,所述齿轮箱随后驱动高速轴。高速轴利用联接器可旋转地驱动发电机,并且高速轴的旋转促进通过发电机的电功率的产生。
在这类风力涡轮中,在现场触发的与联轴器相关的任何滑动故障要求视觉检验以检查故障的原因。基于数据,几乎80%的触发的滑动故障不是实际的滑动事件,并且不应该导致风力涡轮停机,这导致功率生产的显著损失并且招致相当大的服务成本。
因此,鉴于上述,用于检测风力涡轮功率系统的联轴器中的实际滑动并拒绝无滑动事件的系统和方法在本领域中将是受欢迎的。
发明内容
本公开的方面和优点将在以下描述中部分地阐述,或可从描述中显而易见,或可通过本发明的实践来学习。
在方面中,本公开涉及一种用于检测旋转轴的联接器中的实际滑动(并因此拒绝无滑动事件)的方法。该方法包括针对故障经由控制器监测与联接器有关的多个传感器信号。响应于检测到与联接器相关的多个传感器信号中的故障,该方法包括经由控制器使用一个或多个分类参数来确定故障是指示联接器的实际滑动还是无滑动事件。当故障指示实际滑动时,该方法包括经由控制器使用多个传感器信号和实际滑动的持续时间来估计实际滑动的幅度。此外,该方法包括经由控制器基于联接器中的实际滑动的幅度来实施控制动作。
在实施例中,多个传感器信号可以包括例如发电机速度,转子速度,发电机扭矩需求,传动系加速度,一个或多个电信号,风速,俯仰角,系统操作状态和/或其函数。在另一个实施例中,(一个或多个)分类参数可以包括多个传感器信号的幅度中的差,多个传感器信号中的变化率,多个传感器信号的绝对值,或多个传感器信号的统计分析,和/或类似参数。
在另一个实施例中,使用一个或多个分类参数来确定所述故障是指示所述联接器的实际滑动还是无滑动事件可以包括使用所述多个传感器信号中的幅度中的差,所述多个传感器信号中的变化率,所述多个传感器信号的绝对值中的至少一个和/或所述多个传感器信号的统计分析以检测具有实际滑动的故障与仅具有无滑动事件的故障之间的差。
在另外的实施例中,该方法可以包括经由编程在控制器中的计算机实现的模型或云服务器使用多个传感器信号和实际滑动的持续时间来估计实际滑动的幅度。此外,控制器可以在线或离线使用。
在另外的实施例中,该方法可以包括使用训练数据和测试数据来开发计算机实现的模型。在这样的实施例中,使用训练数据和测试数据来开发计算机实现的模型可以包括至少使用训练数据来训练计算机实现的模型。在这样的实施例中,计算机实现的模型可以包括监督的基于学习的算法,例如机器学习算法或人工智能。因此,在实施例中,该方法可以包括使用测试数据和来自监督的基于学习的算法的输出数据来测试计算机实现的模型。
在另外的实施例中,该方法包括将计算机实现的模型的准确度与对于持续时间的准确度阈值进行比较。当计算机实现的模型的准确度大于准确度阈值时,该方法可以可选地包括进一步利用来自持续时间的新的学习数据来训练计算机实现的模型。相比之下,当计算机实现的模型的准确度小于准确度阈值时,该方法包括调整计算机实现的模型或接收附加数据。
在若干实施例中,该方法可以包括在针对故障监测与联接器有关的多个传感器信号之前使用训练数据和测试数据来开发计算机实现的模型。
在另一个实施例中,该方法可以包括使用训练数据,测试数据,来自监督的基于学习的算法的输出数据以及新的学习数据来连续地训练和更新计算机实现的模型。
在特定实施例中,多个传感器信号可以是来自一个或多个传感器的原始测量。另外地或备选地,该方法可以包括使用一个或多个处理算法来处理多个传感器信号。
在某些实施例中,旋转轴可耦合到风力涡轮功率系统的发电机的高速轴。
在另一个方面中,本公开涉及一种用于检测风力涡轮功率系统的旋转轴的联接器中的实际滑动(并因此拒绝无滑动事件)的系统。该系统包括具有至少一个处理器的控制器,该至少一个处理器具有在其中编程的至少一个计算机实现的模型。(一个或多个)计算机实现的模型被配置成实现多个操作,包括但不限于:针对故障接收与联接器相关的多个传感器信号,响应于检测到与联接器相关的多个传感器信号中的故障,使用一个或多个分类参数来确定故障是指示联接器的实际滑动还是无滑动事件,并且当故障指示实际滑动时,经由计算机实现的模型,使用多个传感器信号和实际滑动的持续时间估计实际滑动的幅度。此外,(一个或多个)处理器被配置成基于联接器中的实际滑动的幅度来实施控制动作。
本发明提供一组技术方案,如下。
技术方案1. 一种用于检测旋转轴的联接器中的实际滑动的方法,所述方法包括:
针对故障经由控制器监测与所述联接器有关的多个传感器信号;
响应于检测到与所述联接器相关的所述多个传感器信号中的故障,经由所述控制器使用一个或多个分类参数来确定所述故障是指示所述联接器的实际滑动还是无滑动事件;
当所述故障指示所述实际滑动时,经由所述控制器使用所述多个传感器信号和所述实际滑动的持续时间来估计所述实际滑动的幅度;以及
经由所述控制器基于所述联接器中的所述实际滑动的所述幅度来实施控制动作。
技术方案2. 根据技术方案1所述的方法,其中,所述多个传感器信号包括下列中的至少一个:发电机速度;转子速度;发电机扭矩需求;传动系加速度;一个或多个电信号;风速;俯仰角;系统操作状态或其功能。
技术方案3. 如技术方案1所述的方法,其中,所述一个或多个分类参数包括下列中的至少一个:所述多个传感器信号的幅度中的差;所述多个传感器信号中的变化率;所述多个传感器信号的绝对值;或所述多个传感器信号的统计分析。
技术方案4. 如技术方案3的方法,其中,使用一个或多个分类参数确定所述故障是指示所述联接器的所述实际滑动还是所述无滑动事件进一步包括:
使用所述多个传感器信号的幅度中的差,所述多个传感器信号中的变化率,所述多个传感器信号的绝对值或所述多个传感器信号的统计分析中的至少一个来检测具有实际滑动的故障与仅具有无滑动事件的故障之间的差。
技术方案5. 如技术方案1所述的方法,还包括经由编程在所述控制器中的计算机实现的模型或云服务器中的至少一个,使用所述多个传感器信号和所述实际滑动的所述持续时间来估计所述实际滑动的所述幅度。
技术方案6. 如技术方案5所述的方法,还包括使用训练数据和测试数据来开发所述计算机实现的模型。
技术方案7. 如技术方案6所述的方法,其中,使用训练数据和测试数据来开发所述计算机实现的模型进一步包括:
至少使用所述训练数据来训练所述计算机实现的模型,所述计算机实现的模型包括一个或多个监督的基于学习的算法;以及,
使用所述测试数据和来自所述一个或多个监督的基于学习的算法的输出数据来测试所述计算机实现的模型。
技术方案8. 如技术方案7所述的方法,进一步包括:
将所述计算机实现的模型的准确度与对于所述持续时间的准确度阈值进行比较;
当所述计算机实现的模型的所述准确度大于所述准确度阈值时,可选地进一步利用来自所述持续时间的新的学习数据来训练所述计算机实现的模型;以及
当所述计算机实现的模型的所述准确度小于所述准确度阈值时,调整所述计算机实现的模型或接收附加数据。
技术方案9. 如技术方案6所述的方法,还包括在针对故障监测与所述联接器有关的所述多个传感器信号之前,使用所述训练数据和所述测试数据来开发所述计算机实现的模型。
技术方案10. 如技术方案8所述的方法,还包括使用所述训练数据、所述测试数据、来自所述监督的基于学习的算法的输出数据以及所述新的学习数据来连续地训练和更新所述计算机实现的模型。
技术方案11. 如技术方案1所述的方法,其中,所述多个传感器信号是来自一个或多个传感器的原始测量。
技术方案12. 如技术方案1所述的方法,还包括使用一个或多个处理算法来处理所述多个传感器信号。
技术方案13. 如技术方案1所述的方法,其中,所述旋转轴是风力涡轮功率系统的发电机的高速轴。
技术方案14. 一种用于检测风力涡轮功率系统的旋转轴的联接器中的实际滑动的系统,所述系统包括:
控制器,所述控制器包括至少一个处理器,所述至少一个处理器具有在其中编程的至少一个计算机实现的模型,所述至少一个计算机实现的模型被配置成实现多个操作,所述多个操作包括:
针对故障接收与联接器相关的多个传感器信号;
响应于检测到与所述联接器相关的所述多个传感器信号中的故障,使用一个或多个分类参数来确定所述故障是指示所述联接器的实际滑动还是无滑动事件;以及
当所述故障指示所述实际滑动时,经由所述计算机实现的模型,使用所述多个传感器信号和所述实际滑动的持续时间来估计所述实际滑动的幅度,
其中所述至少一个处理器被配置成基于所述联接器中的所述实际滑动的幅度来实施控制动作。
技术方案15. 如技术方案14所述的系统,其中,所述多个传感器信号包括下列中的至少一个:发电机速度;转子速度;发电机扭矩需求;传动系加速度;一个或多个电信号;风速;俯仰角;系统操作状态或其函数;。
技术方案16. 如技术方案14所述的系统,其中,所述一个或多个分类参数包括下列中的至少一个:所述多个传感器信号的幅度中的差;所述多个传感器信号中的变化率;或所述多个传感器信号的绝对值。
技术方案17. 如技术方案16的系统,其中,使用一个或多个分类参数来确定所述故障是指示所述联接器的所述实际滑动还是所述无滑动事件进一步包括:
使用所述多个传感器信号的幅度中的差,所述多个传感器信号中的变化率,或所述多个传感器信号的绝对值中的至少一个来检测具有实际滑动的故障与仅具有无滑动事件的故障之间的差。
技术方案18. 如技术方案14的系统,其中,所述多个操作进一步包括:
使用训练数据和测试数据来开发计算机实现的模型。
技术方案19. 如技术方案18的系统,其中,使用训练数据和测试数据来开发所述计算机实现的模型进一步包括:
至少使用所述训练数据来训练所述计算机实现的模型,所述计算机实现的模型包括监督的基于学习的算法;以及,
使用测试数据和来自所述监督的基于学习的算法的输出数据来测试计算机实现的模型。
技术方案20. 如技术方案19的系统,其中,所述多个操作进一步包括:
将所述计算机实现的模型的准确度与对于所述持续时间的准确度阈值进行比较;
当所述计算机实现的模型的所述准确度大于所述准确度阈值时,利用来自所述持续时间的新的学习数据进一步训练所述计算机实现的模型;以及
当所述计算机实现的模型的所述准确度小于所述准确度阈值时,调整所述计算机实现的模型或接收附加数据;
在针对故障监测与所述联接器相关的所述多个传感器信号之前,使用所述训练数据和所述测试数据来开发所述计算机实现的模型;以及
使用所述训练数据,所述测试数据,来自所述监督的基于学习的算法的所述输出数据和所述新的学习数据来连续地训练和更新所述计算机实现的模型。
参考以下描述和所附权利要求书,本发明的这些和其它特征、方面和优点将变得更好理解。并入本说明书中并构成本说明书的部分的附图图示本发明的实施例,并与描述一起用于阐释本发明的原理。
附图说明
在参考附图的说明书中阐述本发明(包括其最佳模式)的针对本领域普通技术人员的完整且能够实现的公开,在附图中:
图1图示根据本公开的风力涡轮的一个实施例的透视图;
图2图示图1中所示的风力涡轮的一部分的放大截面图;
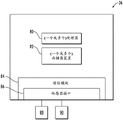
图3图示可以包括在根据本公开的风力涡轮的控制器中的适当组件的一个实施例的框图;
图4图示根据本公开的用于检测风力涡轮功率系统的联接器中的实际滑动的方法的一个实施例的流程图;
图5图示根据本公开的用于检测风力涡轮功率系统的联接器中的实际滑动的系统的计算机实现的模型的实现的一个实施例的示意图;
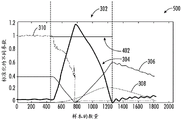
图6图示根据本公开的多个传感器信号(y轴)与多个样本(x轴)的一个实施例的图表,特别图示包含风力涡轮功率系统的联接器的滑动事件的滑动区;
图7图示根据本公开的Y变量(y轴)与多个样本(x轴)的一个实施例的图表,特别地图示指示风力涡轮功率系统的联接器的实际滑动事件的Y变量;以及
图8图示来自图6和图7的图表的组合的一个实施例的图表,其用作计算机实现的模型的输入参数,以确定在风力涡轮功率系统的联接器中是否发生实际滑动事件或无滑动事件。
具体实施方式
现在将详细参考各种实施例,在每个图中图示其一个或多个示例。每个示例通过解释的方式来提供,而不是意味着限制。例如,作为一个实施例的一部分说明或描述的特征可以用在其他实施例上或与其结合地使用以产生又一些实施例。意图的是,本公开包括这类修改和变型。
通常,本公开涉及用于在风力涡轮功率系统中触发对应故障时自动分类实际滑动事件的系统和方法。另外,本公开的系统和方法还可以例如使用来自风力涡轮功率系统的传感器数据来估计在故障期间可能发生了的滑动的幅度。更特别地,在实施例中,为了分类的目的,本公开的系统和方法可以评估传感器信号的振幅中的差,传感器信号中的变化率和/或传感器信号的绝对振幅,以检测具有实际滑动的标记滑动事件与不存在滑动时的那些标记事件之间的差。这样的传感器信号可以包括例如发电机速度,转子速度,传动系加速度,一个或多个电信号,风速,俯仰角,系统操作状态和/或发电机扭矩需求。此外,在实施例中,传感器信号可以基于信号处理算法而被原始使用或被操纵。因此,经处理的传感器信号也可用于进行预测和估计。更特别地,在实施例中,为了估计滑动幅度,可以基于在持续时间内的所报告的滑动和传感器数据来开发经验模型。因此,在这样的实施例中,该模型具有用来基于任何新的故障数据和可用于传感器的数据来改进其预测的固有能力。
现在参考附图,图1图示根据本公开的风力涡轮10的一个实施例的透视图。在所图示实施例中,风力涡轮10是水平轴风力涡轮。备选地,风力涡轮10可以是竖直轴风力涡轮。另外,如所示,风力涡轮10包括从支承系统14延伸的塔架12,安装在塔架12上的机舱16,以及耦合到机舱16的转子18。转子18包括可旋转毂20和耦合到毂20并从毂20向外延伸的至少一个转子叶片22。此外,如所示,转子18具有三个转子叶片22。在备选实施例中,转子18包括多于或少于三个转子叶片22。在实施例中,塔架12由管状钢制成,以在支承系统14和机舱16之间限定空腔(图1中未示出)。在备选实施例中,塔架12是具有任何合适高度的任何合适类型的塔架。
转子叶片22围绕毂20间隔开,以促进旋转转子18,从而使动能能够从风转到可用的机械能,并且随后转到电能。此外,转子叶片22通常通过在多个载荷传递(loadtransfer)区域26处将叶片根部24耦合到毂20而固定到毂20。载荷传递区域26具有毂载荷传递区域和叶片载荷传递区域(均未在图1中示出)。因此,引入到转子叶片22的载荷经由载荷传递区域26传递到毂20。
因此,当风从方向28撞击转子叶片22时,转子18围绕旋转轴线30旋转。当转子叶片22旋转并受到离心力时,转子叶片22也受到各种力和力矩。因此,转子叶片22可以从中性或非偏转(deflect)位置偏转和/或旋转到偏转位置。
此外,可以通过俯仰调节系统32改变转子叶片22的俯仰角或叶片间距(bladepitch),(即,确定转子叶片22相对于风的方向28的视角)以通过调节至少一个转子叶片22相对于风矢量的角位置来控制由风力涡轮10产生的负载和功率。示出转子叶片22的俯仰轴线34。在风力涡轮10的操作期间,俯仰调节系统32可以改变转子叶片22的叶片间距,使得转子叶片22移动到顺桨(feathered)位置,使得至少一个转子叶片22相对于风矢量的视角提供了转子叶片22朝向风矢量定向的最小表面积,这促进降低转子18的旋转速度和/或促进转子18的失速(stall)。
在一个实施例中,每个转子叶片22的叶片间距由控制器36个体控制。备选地,所有转子叶片22的叶片间距可以由控制器36同时控制。此外,在实施例中,当方向28改变时,可以围绕偏航轴线38控制机舱16的偏航方向,以相对于方向28定位转子叶片22。
在实施例中,控制器36被示出为集中在机舱16内,然而,控制器36可以是遍及风力涡轮10,在支承系统14上,在风电场内和/或在远程控制中心处的分布式系统。
现在参见图2,根据本公开图示风力涡轮10的一部分的放大截面图。在实施例中,毂20通过转子轴44(有时称为主轴或低速轴),齿轮箱46,高速轴48和联接器50可旋转地耦合到定位在机舱16内的发电机42。在实施例中,转子轴44设置成与纵向轴线40同轴。转子轴44的旋转可旋转地驱动齿轮箱46,齿轮箱46随后驱动高速轴48。高速轴48利用联接器50可旋转地驱动发电机42,并且高速轴48的旋转促进由发电机42产生电功率。齿轮箱46和发电机42由支承52,54支承。此外,在实施例中,齿轮箱46利用双路径几何结构来驱动高速轴48。备选地,转子轴44利用联接器50直接耦合到发电机42。
机舱16还包括偏航驱动机构56,该偏航驱动机构56可用于使机舱16和毂20在偏航轴38(图1中示出)上旋转,以控制转子叶片22相对于风的方向28的视角。机舱16还包括至少一个气象桅杆(mast)58,其包括风向标和风速计(图2中均未示出)。因此,在实施例中,桅杆58向控制器36提供可包括风向和/或风速的信息。另外,如所图示实施例所示,机舱16还包括主前支承轴承(main forward support bearing)60和主全支承轴承(main all supportbearing)62。
仍然参照图2,前支承轴承60和后支承轴承62促进转子轴44的径向支承和对准。前支承轴承60在毂20附近耦合到转子轴44。后支承轴承62位于齿轮箱46和/或发电机42附近的转子轴44上。备选地,机舱16包括任何数量的支承轴承,其使得风力涡轮10能够如本文所公开的那样起作用。转子轴44,发电机42,齿轮箱46,高速轴48,联接器50和/或任何相关联的紧固,支承和/或固定装置(包括但不限于支承52,54以及前支承轴承60和后支承轴承62)有时被称为传动系64,在该示例中被称为齿轮传动系。
在其他示例中,齿轮传动系64由直接传动系代替。例如,相对长的主轴连接毂20和发电机42。主轴44和发电机轴48通常经由锥形套筒(sleeve)联接器耦合。主轴44通常由靠近毂20的前轴承(例如球形滚子轴承)和靠近发电机42的后轴承(例如CARB轴承)支承。前轴承和后轴承连接到底座(bedplate)并配置成将轴向载荷和弯曲载荷传递到安装到机舱16的底座。发电机42悬挂在主轴44上。另外的扭矩梁可以提供在发电机42和底座之间,以在风力涡轮10的操作期间将扭矩传递到底座。
在实施例中,毂20还可以包括俯仰组合件66。例如,如图2中所示,俯仰组合件66包括一个或多个俯仰驱动系统68和至少一个传感器70。每个俯仰驱动系统68耦合到相应的转子叶片22(如图1中所示),以用于沿俯仰轴线34调节关联转子叶片22的叶片间距。图2中仅示出了三个俯仰驱动系统68中的一个。
在实施例中,俯仰组合件66包括至少一个俯仰轴承72,该俯仰轴承72耦合到毂20和相应的转子叶片22(在图1中示出),以用于使相应的转子叶片22围绕俯仰轴线34旋转。俯仰驱动系统68包括俯仰驱动马达74,俯仰驱动齿轮箱76和俯仰驱动小齿轮78。俯仰驱动马达74耦合到俯仰驱动齿轮箱76,使得俯仰驱动马达74将机械力给予俯仰驱动齿轮箱76。俯仰驱动齿轮箱76耦合到俯仰驱动小齿轮78,使得俯仰驱动小齿轮78由俯仰驱动齿轮箱76旋转。俯仰轴承72耦合到俯仰驱动小齿轮78,使得俯仰驱动小齿轮78的旋转引起俯仰轴承72的旋转。更特别地,在实施例中,俯仰驱动小齿轮78耦合到俯仰轴承72,使得俯仰驱动齿轮箱76的旋转使俯仰轴承72和转子叶片22绕俯仰轴线34旋转,以改变转子叶片22的叶片间距。此外,俯仰驱动系统68耦合到控制器36,以用于在从控制器36接收到一个或多个信号时调节转子叶片22的叶片间距。
现在参考图3,图示根据本公开的方面的可包括在控制器36内的适当组件的一个实施例的框图。应当理解,图3的控制器的各种组件可应用于任何适当的控制器,包括例如涡轮控制器,风电场级控制器,监督控制器和/或其它适当的控制系统。
如所示,控制器36可以包括一个或多个处理器80和相关联的存储器装置82,其被配置成执行各种计算机实现的功能(例如,执行本文公开的方法,步骤,计算等)。如本文所使用的,术语“处理器”不仅指本领域中被称为包括在计算机中的集成电路,而且还指控制器,微控制器,微型计算机,可编程逻辑控制器(PLC),专用集成电路和其它可编程电路。另外,(一个或多个)存储器装置82通常可以包括(一个或多个)存储器元件,包括但不限于计算机可读介质(例如,随机存取存储器(RAM)),计算机可读非易失性介质(例如,闪速存储器),软盘,紧致盘只读存储器(CD-ROM),磁光盘(MOD),数字多功能盘(DVD)和/或其它适当的存储器元件。
另外,控制器36还可以包括通信模块84,其用来促进风力涡轮机10的各种组件和控制器36之间的通信。例如,通信模块84可以包括传感器接口86(例如,一个或多个模数转换器),其用来允许由一个或多个传感器88,90传送的信号被转换为可由控制器36理解和处理的信号。应当领会,传感器88,90可以使用任何合适的部件通信地耦合到通信模块84。例如,如图3中所示,传感器88,90经由有线连接耦合到传感器接口86。然而,在其它实施例中,传感器88,90可经由无线连接(例如通过使用本领域已知的任何适当的无线通信协议)耦合到传感器接口86。因此,处理器80可以被配置成从传感器88,90接收一个或多个信号。
风力涡轮10的传感器88,90可以是被配置成测量风力涡轮10处或附近的任何操作条件和/或风参数的任何适当的传感器。例如,传感器88,90可以包括叶片传感器,其用于测量转子叶片22中的一个的俯仰角或用于测量作用在转子叶片22中的一个上的负载;用于监测发电机42的发电机传感器(例如,扭矩,旋转速度,加速度和/或功率输出);和/或用于测量各种风参数的各种风传感器。另外,传感器88,90可以位于风力涡轮10的地面附近,机舱16上和/或气象桅杆58上。
还应当理解,可以在任何位置处采用任何其它数量或类型的传感器。例如,传感器88,90可以是模拟传感器,数字传感器,光学/视觉传感器,加速度计,压力传感器,迎角传感器,振动传感器,MIMU传感器,光纤系统,温度传感器,风传感器,声检测和测距(SODAR)传感器,红外激光器,光检测和测距(LIDAR)传感器,辐射计,皮托管,探空仪(rawinsonde)和/或任何其它适当的传感器。应当领会,如本文所使用的,术语“监测器”及其变型指示风力涡轮的各种传感器可以被配置成提供被监测的参数的直接测量或这样的参数的间接测量。因此,传感器88,90例如可以用来生成与被监测的参数相关的信号,然后可以由控制器利用该信号来确定实际状况。
现在参见图4-8,本公开涉及用于检测风力涡轮10的联接器(例如高速轴48上的联接器50)中的实际滑动的方法100和系统200。通常,方法100将在这里参考上面参考图1-3描述的风力涡轮10来描述。然而,本领域的普通技术人员应当领会,所公开的方法100通常可在具有任何适当配置的任何风力涡轮的情况下来利用。另外,尽管为了说明和讨论的目的,图4描绘以特定顺序执行的步骤,但是本文讨论的方法不限于任何特定顺序或布置。使用本文提供的公开,本领域技术人员将领会,在不脱离本公开的范围的情况下,可以以各种方式省略,重新布置,组合和/或适配本文公开的方法的各种步骤。
如(102)处所示,方法100包括针对故障经由控制器36监测与联耦器有关的多个传感器信号。例如,在实施例中,传感器信号可以包括例如发电机速度,转子速度,发电机扭矩需求,传动系加速度,一个或多个电信号(例如,电流,电压等),风速,俯仰角,系统操作状态和/或其功能。在特定实施例中,多个传感器信号可以是来自诸如风力涡轮10的传感器88,90的一个或多个传感器的原始测量。另外地或备选地,方法100可以包括使用一个或多个处理算法来处理多个传感器信号。
如(104)处所示,方法100包括确定在传感器信号中是否检测到故障。响应于检测到与联接器相关的多个传感器信号中的故障,如(106)处所示,方法100包括经由控制器36使用一个或多个分类参数来确定故障是指示联接器50的实际滑动还是无滑动事件。例如,在实施例中,(一个或多个)分类参数可以包括多个传感器信号的幅度中的差,多个传感器信号中的变化率,多个传感器信号的绝对值,多个传感器信号的统计分析,和/或类似参数。
在特定实施例中,例如,控制器36可以使用多个传感器信号的幅度中的差,多个传感器信号中的变化率,多个传感器信号的绝对值,或多个传感器信号的统计分析来确定故障是指示联接器的实际滑动还是无滑动事件,以检测具有实际滑动的故障与仅具有无滑动事件的故障之间的差。
仍然参考图4,如(108)处所示,方法100确定故障指示实际滑动。因此,如(110)处所示,方法100包括经由控制器36使用多个传感器信号和实际滑动的持续时间来估计实际滑动的幅度。例如,在实施例中,方法100可以包括经由编程在控制器36中的计算机实现的模型210或云服务器中的至少一个使用多个传感器信号和实际滑动的持续时间来估计实际滑动的幅度。因此,这种估计可以在线或离线执行。此外,如(112)处所示,方法100包括经由控制器36基于联接器50中的实际滑动的幅度来实施控制动作。
现在参考图5-8可以进一步理解本公开的系统和方法。例如,如图5中所示,图示用于检测诸如高速轴48上的联接器50的旋转轴的联接器中的实际滑动的系统200的一个实施例的示意图。如所示,系统200可以包括具有各种计算机模块202的控制器36,其用于实现这里描述的方法步骤。
特别地,如所示,输入准备模块204被配置成针对故障接收与联接器相关的多个传感器信号。另外,输入准备模块204可以使用机器学习或人工智能来训练输入数据。此外,如所图示实施例中所示,系统200可以包括模型开发模块206,其包括(一个或多个)计算机实现的模型210。因此,在实施例中,如所示,模型开发模块206从输入准备模块204接收输入数据,并且可以开发(一个或多个)计算机实现的模型210。在若干实施例中,系统200可以在针对故障监测与联接器有关的多个传感器信号之前开发计算机实现的模型210。更特别地,如所示,输入准备模块204可将数据分成如212处所示的两个数据集,例如分成训练数据214和测试数据216。在这类实施例中,如所示,系统200可以至少使用训练数据214来训练(一个或多个)计算机实现的模型210。在实施例中,训练数据214可以包括例如来自风力涡轮10,相同风电场中的另一风力涡轮的数据和/或历史数据。
因此,在这类实施例中,训练数据214可用于学习(或训练)(一个或多个)计算机实现的模型210。此外,在某些实施例中,(一个或多个)计算机实现的模型210可以包括监督的基于学习的算法,诸如机器学习算法或人工智能。此外,如所示,测试数据216可以与(一个或多个)计算机实现的模型210的监督的基于学习的算法的输出218一起用作模型测试220的输入,以用于测试(一个或多个)计算机实现的模型210。在另一个实施例中,系统200还可以使用训练数据214,测试数据216,来自监督的基于学习的算法的输出数据218和/或新的学习数据234来连续地训练和更新(一个或多个)计算机实现的模型210。
在这类实施例中,模型测试220被配置成提供指示(一个或多个)计算机实现的模型210是否准备好在风力涡轮10的现场实现的结果222。更特别地,如所示,系统200还可包括通过将(一个或多个)计算机实现的模型210的准确度(例如,结果222)与对于持续时间的准确度阈值进行比较来评估结果222的现场试验模块208。例如,如224处所示,当(一个或多个)计算机实现的模型210的准确度大于准确度阈值(例如,大于70%正确率(correct))时,系统200被配置成利用来自持续时间的新的学习数据234进一步训练计算机实现的模型210,并且然后部署用于现场测试(如228和232处所示)。相比之下,当(一个或多个)计算机实现的模型210的准确度小于准确度阈值(例如,小于70%正确率)时,系统200被配置成调整或修改计算机实现的模型或接收附加数据(如230处所示)。
现在参考图6-8,图示各种图表以进一步解释本公开的系统和方法。特别地,图6图示根据本公开的多个传感器信号(y轴)(输入变量)与多个样本(x轴)的一个实施例的图表300,特别图示包含风力涡轮功率系统的联接器的滑动事件304的滑动区302。特别地,如所图示实施例中所示,多个传感器信号包括发电机速度306,转子速度308和发电机扭矩需求310。图7图示根据本公开的Y变量(y轴)与多个样本(x轴)的一个实施例的图表400,特别图示指示风力涡轮10的联接器的滑动区302中的实际滑动事件402的Y变量。特别地,如所示,在滑动区302之外,Y变量等于零(0),而在滑动区302中,Y变量等于一(1)。因此,图8图示来自图6和图7的图表的组合的一个实施例的图表500,其可以用作计算机实现的模型210的输入参数,以确定在风力涡轮10的联接器中是否发生了实际的滑动事件或无滑动事件。因此,由于诸如发电机速度306,转子速度308和发电机扭矩需求310之类的传感器信号记录滑动事件期间的显著变化,因此可以监测这些参数以检测滑动事件。然而,由于相同的信号可以记录无滑动事件期间的变化,因此本公开还包括监测这类信号的变化幅度和/或变化率,以区分实际滑动事件和无滑动事件。
上面详细描述用于风力涡轮的传动系的系统的示范实施例。该系统不限于本文描述的特定实施例,而是该系统的组件可以独立地并且与本文描述的其他组件分开地使用。相反,实施例可以结合许多其他转子叶片应用来实施和使用。
尽管本公开的各种实施例的特定特征可以在一些附图中示出而在其它附图中未示出,但这仅是为了方便。根据本公开的原理,附图的任何特征可以与任何其他附图的任何特征相结合地被参考和/或要求保护。
本发明的各个方面和实施例由以下编号的条款限定:
条款1. 一种用于检测旋转轴的联接器中的实际滑动的方法,所述方法包括:
针对故障经由控制器监测与所述联接器有关的多个传感器信号;
响应于检测到与所述联接器相关的多个传感器信号中的故障,经由该控制器使用一个或多个分类参数来确定所述故障是指示所述联接器的实际滑动还是无滑动事件;
当所述故障指示所述实际滑动时,经由所述控制器使用所述多个传感器信号和所述实际滑动的持续时间来估计所述实际滑动的幅度;以及
经由所述控制器基于所述联接器中的实际滑动的幅度来实施控制动作。
条款2. 如条款1所述的方法,其中,所述多个传感器信号包括下列中的至少一个:发电机速度,转子速度,发电机扭矩需求,传动系加速度,一个或多个电信号,风速,俯仰角,系统操作状态,或其功能。
条款3. 根据前述条款中的任一项所述的方法,其中,所述一个或多个分类参数包括所述多个传感器信号的幅度中的差,所述多个传感器信号中的变化率,所述多个传感器信号的绝对值或所述多个传感器信号的统计分析中的至少一个。
条款4. 如条款3所述的方法,其中,使用一个或多个分类参数来确定所述故障是指示所述联接器的实际滑动还是无滑动事件进一步包括:
使用所述多个传感器信号的幅度的中差,所述多个传感器信号中的变化率,所述多个传感器信号的绝对值或所述多个传感器信号的统计分析中的至少一个来检测具有实际滑动的故障与仅具有无滑动事件的故障之间的差。
条款5. 根据前述条款中的任一项所述的方法,还包括经由编程在所述控制器中的计算机实现的模型或云服务器中的至少一个,使用所述多个传感器信号和所述实际滑动的持续时间来估计所述实际滑动的幅度。
条款6. 如条款5所述的方法,进一步包括使用训练数据和测试数据来开发所述计算机实现的模型。
条款7. 如条款6所述的方法,其中,使用训练数据和测试数据来开发所述计算机实现的模型进一步包括:
至少使用所述训练数据来训练所述计算机实现的模型,所述计算机实现的模型包括一个或多个监督的基于学习的算法;以及
使用所述测试数据和来自所述一个或多个监督的基于学习的算法的输出数据来测试所述计算机实现的模型。
条款8. 如条款7所述的方法,进一步包括:
将所述计算机实现的模型的准确度与所述持续时间的准确度阈值进行比较;
当所述计算机实现的模型的准确度大于所述准确度阈值时,可选地进一步利用来自所述持续时间的新的学习数据来训练所述计算机实现的模型;以及
当所述计算机实现的模型的准确度小于所述准确度阈值时,调整所述计算机实现的模型或接收附加数据。
条款9. 如条款6所述的方法,进一步包括在针对故障监测与所述联接器相关的所述多个传感器信号之前使用所述训练数据和所述测试数据来开发所述计算机实现的模型。
条款10. 如条款8所述的方法,进一步包括使用所述训练数据,所述测试数据,来自所述监督的基于学习的算法的输出数据,以及所述新的学习数据来连续地训练和更新所述计算机实现的模型。
条款11. 如前述条款中的任一项所述的方法,其中,所述多个传感器信号是来自一个或多个传感器的原始测量。
条款12. 根据前述条款中的任一项所述的方法,还包括使用一个或多个处理算法来处理所述多个传感器信号。
条款13. 根据前述条款中的任一项所述的方法,其中,所述旋转轴是风力涡轮功率系统的发电机的高速轴。
条款14. 一种用于检测风力涡轮功率系统的旋转轴的联接器中的实际滑动的系统,所述系统包括:
控制器,所述控制器包括至少一个处理器,所述至少一个处理器具有在其中编程的至少一个计算机实现的模型,所述至少一个计算机实现的模型被配置成实现多个操作,所述多个操作包括:
针对故障接收与所述联接器相关的多个传感器信号;
响应于检测到与所述联接器相关的所述多个传感器信号中的故障,使用一个或多个分类参数来确定所述故障是指示所述联接器的实际滑动还是无滑动事件;以及
当该故障指示所述实际滑动时,经由所述计算机实现的模型,使用所述多个传感器信号和所述实际滑动的持续时间来估计所述实际滑动的幅度,
其中所述至少一个处理器被配置成基于所述联接器中的实际滑动的幅度来实施控制动作。
条款15. 如条款14所述的系统,其中,所述多个传感器信号包括下列的至少一各:发电机速度,转子速度,发电机扭矩需求,传动系加速度,一个或多个电信号,风速,俯仰角,系统操作状态,或其功能。
条款16. 如条款14-15所述的系统,其中,所述一个或多个分类参数包括所述多个传感器信号的幅度中的差,所述多个传感器信号中的变化率或所述多个传感器信号的绝对值中的至少一个。
条款17. 如条款16所述的系统,其中,使用一个或多个分类参数确定所述故障是指示所述联接器的实际滑动还是无滑动事件进一步包括:
使用所述多个传感器信号的幅度中的差,所述多个传感器信号中的变化率,或所述多个传感器信号的绝对值中的至少一个来检测具有实际滑动的故障与仅具有无滑动事件的故障之间的差。
条款18. 如条款14-17所述的系统,其中,所述多个操作进一步包括:
使用训练数据和测试数据开发计算机实现的模型。
条款19. 如条款18所述的系统,其中,使用训练数据和测试数据开发所述计算机实施的模型进一步包括:
至少使用所述训练数据来训练所述计算机实现的模型,所述计算机实现的模型包括监督的基于学习的算法;以及
使用测试数据和来自监督的基于学习的算法的输出数据来测试计算机实现的模型。
条款20. 如条款19所述的系统,其中,所述多个操作进一步包括:
将所述计算机实现的模型的准确度与所述持续时间的准确度阈值进行比较;
当所述计算机实现的模型的准确度大于所述准确度阈值时,利用来自所述持续时间的新的学习数据进一步训练所述计算机实现的模型;以及,
当所述计算机实现的模型的准确度小于所述准确度阈值时,调整所述计算机实现的模型或接收附加数据;
在针对故障监测与所述联接器相关的所述多个传感器信号之前,使用所述训练数据和所述测试数据来开发所述计算机实现的模型;以及
使用训练数据、测试数据、来自监督的基于学习的算法的输出数据和新的学习数据来连续地训练和更新计算机实现的模型。
本书面描述使用包括最佳模式的实施例来来公开本公开,并且还使得本领域的任何技术人员能够实践本公开,包括制作和使用任何装置或系统以及执行任何并入的方法。。虽然在前面已经公开各种特定实施例,但是本领域技术人员将认识到,权利要求的精神和范围允许等效的修改。特别地,上述实施例的相互不排他的特征可以彼此组合。本公开的可取得专利范围由权利要求来定义,并且可包括本领域技术人员想到的其它示例。如果这些其它示例包括与权利要求的文字语言没有差别的结构元件,或者如果它们包括与权利要求的文字语言无实质性差别的等效结构元件,则这些其它示例旨在处于权利要求书的范围内。
Claims (10)
1.一种用于检测旋转轴的联接器中的实际滑动的方法,所述方法包括:
针对故障经由控制器监测与所述联接器有关的多个传感器信号;
响应于检测到与所述联接器相关的所述多个传感器信号中的故障,经由所述控制器使用一个或多个分类参数来确定所述故障是指示所述联接器的实际滑动还是无滑动事件;
当所述故障指示所述实际滑动时,经由所述控制器使用所述多个传感器信号和所述实际滑动的持续时间来估计所述实际滑动的幅度;以及
经由所述控制器基于所述联接器中的所述实际滑动的所述幅度来实施控制动作。
2.根据权利要求1所述的方法,其中,所述多个传感器信号包括下列中的至少一个:发电机速度;转子速度;发电机扭矩需求;传动系加速度;一个或多个电信号;风速;俯仰角;系统操作状态或其功能。
3.如权利要求1所述的方法,其中,所述一个或多个分类参数包括下列中的至少一个:所述多个传感器信号的幅度中的差;所述多个传感器信号中的变化率;所述多个传感器信号的绝对值;或所述多个传感器信号的统计分析。
4.如权利要求3的方法,其中,使用一个或多个分类参数确定所述故障是指示所述联接器的所述实际滑动还是所述无滑动事件进一步包括:
使用所述多个传感器信号的幅度中的差,所述多个传感器信号中的变化率,所述多个传感器信号的绝对值或所述多个传感器信号的统计分析中的至少一个来检测具有实际滑动的故障与仅具有无滑动事件的故障之间的差。
5.如权利要求1所述的方法,还包括经由编程在所述控制器中的计算机实现的模型或云服务器中的至少一个,使用所述多个传感器信号和所述实际滑动的所述持续时间来估计所述实际滑动的所述幅度。
6.如权利要求5所述的方法,还包括使用训练数据和测试数据来开发所述计算机实现的模型。
7.如权利要求6所述的方法,其中,使用训练数据和测试数据来开发所述计算机实现的模型进一步包括:
至少使用所述训练数据来训练所述计算机实现的模型,所述计算机实现的模型包括一个或多个监督的基于学习的算法;以及,
使用所述测试数据和来自所述一个或多个监督的基于学习的算法的输出数据来测试所述计算机实现的模型。
8.如权利要求7所述的方法,进一步包括:
将所述计算机实现的模型的准确度与对于所述持续时间的准确度阈值进行比较;
当所述计算机实现的模型的所述准确度大于所述准确度阈值时,可选地进一步利用来自所述持续时间的新的学习数据来训练所述计算机实现的模型;以及
当所述计算机实现的模型的所述准确度小于所述准确度阈值时,调整所述计算机实现的模型或接收附加数据。
9.如权利要求6所述的方法,还包括在针对故障监测与所述联接器有关的所述多个传感器信号之前,使用所述训练数据和所述测试数据来开发所述计算机实现的模型。
10.如权利要求8所述的方法,还包括使用所述训练数据、所述测试数据、来自所述监督的基于学习的算法的输出数据以及所述新的学习数据来连续地训练和更新所述计算机实现的模型。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/199,535 US11774324B2 (en) | 2021-03-12 | 2021-03-12 | System and method for detecting actual slip in a coupling of a rotary shaft |
| US17/199535 | 2021-03-12 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN115076045A true CN115076045A (zh) | 2022-09-20 |
Family
ID=80683216
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210244424.7A Pending CN115076045A (zh) | 2021-03-12 | 2022-03-11 | 用于在旋转轴的联接器中检测实际滑动的系统和方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11774324B2 (zh) |
| EP (1) | EP4056843B1 (zh) |
| CN (1) | CN115076045A (zh) |
| DK (1) | DK4056843T3 (zh) |
| ES (1) | ES2967323T3 (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117571197B (zh) * | 2024-01-17 | 2024-03-26 | 绵阳师范学院 | 一种联轴器扭矩标定修正方法及系统 |
Family Cites Families (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4605107A (en) | 1983-12-12 | 1986-08-12 | Western Gear Corporation | Slip clutch with slip detector and electrical disconnect |
| JPS6152427A (ja) | 1984-08-17 | 1986-03-15 | Mitsubishi Motors Corp | スリップ式クラッチ装置の制御方法 |
| DE102007003867A1 (de) | 2007-01-25 | 2008-07-31 | Prüftechnik Dieter Busch AG | Verfahren und Vorrichtung zum Überwachen eines eine hochelastische Kupplung aufweisenden Antriebsstrangs |
| EP2053241A1 (en) | 2007-10-24 | 2009-04-29 | Ecotecnia Energias Renovables S.L. | Method for determining fatigue damage in a power train of a wind turbine |
| DE102009039340A1 (de) | 2009-08-29 | 2011-03-03 | Robert Bosch Gmbh | Betriebsführungssystem einer Windenergieanlage und Verfahren unter Verwendung des Betriebsführungssystems |
| US20120219418A1 (en) | 2009-11-13 | 2012-08-30 | Schaeffler Technologies AG & Co. KG | Gps automated tracking of mobile monitoring units |
| JP5725833B2 (ja) | 2010-01-04 | 2015-05-27 | Ntn株式会社 | 転がり軸受の異常診断装置、風力発電装置および異常診断システム |
| US8123478B2 (en) | 2010-05-26 | 2012-02-28 | General Electric Company | Systems and methods for monitoring a condition of a rotor blade for a wind turbine |
| US8364424B2 (en) | 2010-07-30 | 2013-01-29 | General Electric Company | System and method for monitoring a wind turbine gearbox |
| EP2431714A1 (en) | 2010-09-21 | 2012-03-21 | Zero-Max Holding DK A/S | Slip measurement assembly |
| DE102010055876A1 (de) | 2010-12-24 | 2012-06-28 | Aerodyn Engineering Gmbh | Getriebe/Generator-Kupplung |
| TW201241457A (en) | 2011-04-14 | 2012-10-16 | Univ Chung Yuan Christian | Rotating electrical machine anomaly detecting method and apparatus, and wind generating system |
| US8317462B2 (en) | 2011-04-26 | 2012-11-27 | General Electric Company | System for actively monitoring wear on wind turbine brake pads and related methods |
| US9835136B2 (en) | 2011-09-26 | 2017-12-05 | Vestas Wind Systems A/S | System and method for extending the operating life of a wind turbine gear train based on energy storage |
| US9458835B2 (en) | 2012-03-08 | 2016-10-04 | Ntn Corporation | Condition monitoring system |
| CN202645849U (zh) | 2012-07-10 | 2013-01-02 | 国电联合动力技术有限公司 | 耦合于控制系统的风电机组状态监测与故障诊断系统 |
| US10428792B2 (en) * | 2013-03-11 | 2019-10-01 | Illing Engineering Services | Wind turbine control system |
| DE102013208084B3 (de) | 2013-05-02 | 2014-05-08 | Senvion Se | Verfahren und System zum Überwachen einer Windenergieanlage sowie Windenergieanlage |
| JP6407592B2 (ja) | 2013-07-22 | 2018-10-17 | Ntn株式会社 | 風力発電装置の異常診断装置および異常診断方法 |
| WO2015015987A1 (ja) | 2013-08-01 | 2015-02-05 | Ntn株式会社 | 軸受装置の振動解析方法、軸受装置の振動解析装置、および転がり軸受の状態監視装置 |
| US20150134189A1 (en) | 2013-11-08 | 2015-05-14 | Ricardo, Inc. | Systems and methods for remaining useful life predictions in drivetrains |
| CN106471247B (zh) | 2014-06-24 | 2019-06-28 | Ntn株式会社 | 状态监视系统和使用该系统的风力发电系统 |
| US10047726B2 (en) | 2014-07-29 | 2018-08-14 | Ntn Corporation | Condition monitoring system and wind power generation system comprising the same |
| JP6308922B2 (ja) | 2014-09-17 | 2018-04-11 | Ntn株式会社 | 転がり軸受の異常診断装置、風力発電装置、及び転がり軸受の異常診断方法 |
| DK2998812T3 (da) | 2014-09-19 | 2021-10-04 | Laborelec Cvba | Målebehandlingssystem til tilstandsovervågning af en vindturbine |
| DE102014225637A1 (de) | 2014-12-12 | 2016-06-30 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Überwachen einer Windenergieanlage |
| JP6695105B2 (ja) | 2015-07-21 | 2020-05-20 | Ntn株式会社 | 風力発電装置の状態監視装置 |
| JP6553970B2 (ja) | 2015-07-24 | 2019-07-31 | Ntn株式会社 | 異常診断装置およびセンサ外れ検知方法 |
| DK3168463T3 (da) | 2015-11-15 | 2019-07-22 | Adwen Gmbh | Fremgangsmåde og indretning til overvågning af en drivanordning af en vindmølle med elastisk kobling |
| ES2613902B1 (es) | 2015-11-26 | 2018-03-14 | Gamesa Innovation & Technology, S.L. | Método y sistemas de monitorización en tiempo real del estado del aislamiento de los devanados de generadores eólicos |
| CN105510026A (zh) * | 2015-12-10 | 2016-04-20 | 内蒙古久和能源装备有限公司 | 风力发电机组联轴器打滑故障检测装置及方法 |
| EP3431952B1 (en) | 2016-03-17 | 2023-05-03 | NTN Corporation | Condition monitoring system and wind turbine generation apparatus |
| JP2017173041A (ja) | 2016-03-22 | 2017-09-28 | Ntn株式会社 | 状態監視装置およびそれを搭載する風力発電設備、ならびに電気的ノイズ除去方法 |
| DE112017001631T5 (de) | 2016-03-30 | 2018-12-13 | Ntn Corporation | Zustandsüberwachungssystem eines Getriebes und Zustandsüberwachungsverfahren |
| KR101764540B1 (ko) | 2016-06-21 | 2017-08-02 | 두산중공업 주식회사 | 풍력발전기 진동 상태감시 및 진단 시스템 |
| JP6665062B2 (ja) | 2016-08-31 | 2020-03-13 | Ntn株式会社 | 状態監視装置 |
| US11619669B2 (en) * | 2017-01-25 | 2023-04-04 | Panasonic In Iellectual Property Management Co., Ltd. | Condition monitoring system, condition monitoring method, condition monitoring program, and storage medium |
| JP2018124117A (ja) | 2017-01-31 | 2018-08-09 | Ntn株式会社 | 状態監視システムおよび風力発電装置 |
| US11441940B2 (en) | 2017-04-13 | 2022-09-13 | Ntn Corporation | Condition monitoring apparatus, condition monitoring system, and condition monitoring method |
| CN107179503B (zh) * | 2017-04-21 | 2020-07-07 | 美林数据技术股份有限公司 | 基于随机森林的风电机组故障智能诊断预警的方法 |
| US10655607B2 (en) | 2017-06-02 | 2020-05-19 | General Electric Company | Systems and methods for detecting damage in wind turbine bearings |
| CN107178503B (zh) * | 2017-07-28 | 2021-06-08 | 广东美芝制冷设备有限公司 | 旋转式压缩机及制冷装置 |
| US10935001B2 (en) | 2017-11-02 | 2021-03-02 | General Electric Company | System and method for monitoring wear on a gearbox of a wind turbine |
| DE102017131241B4 (de) | 2017-12-22 | 2022-07-14 | fos4X GmbH | Überwachungsverfahren für eine Windkraftanlage, zugehörige Überwachungsvorrichtung sowie Windkraftanlage mit Überwachungsvorrichtung |
| CN108757340B (zh) | 2018-04-25 | 2020-08-25 | 浙江运达风电股份有限公司 | 一种风力发电机高速轴运行实时状态监控方法及系统 |
| CN108386324B (zh) | 2018-04-25 | 2020-04-28 | 浙江运达风电股份有限公司 | 一种风力发电机扭矩限制器健康监测方法及装置 |
| US20200063710A1 (en) * | 2018-08-23 | 2020-02-27 | BluWave Inc. | System and methods for hyper short-term wind power prediction using real-time wind parameter measurements |
| US20200143292A1 (en) * | 2018-11-01 | 2020-05-07 | General Electric Company | Signature enhancement for deviation measurement-based classification of a detected anomaly in an industrial asset |
| CN110174264B (zh) | 2019-06-14 | 2021-08-24 | 三一重能股份有限公司 | 风力发电机组联轴器打滑预警装置、风力发电机及预警方法 |
| CN110132581A (zh) | 2019-06-27 | 2019-08-16 | 三一重能有限公司 | 一种联轴器打滑监测系统及方法 |
| US20230030681A1 (en) * | 2019-12-31 | 2023-02-02 | General Electric Company | System and method for detecting anomalies in wind turbine control signals |
-
2021
- 2021-03-12 US US17/199,535 patent/US11774324B2/en active Active
-
2022
- 2022-02-14 ES ES22156546T patent/ES2967323T3/es active Active
- 2022-02-14 EP EP22156546.8A patent/EP4056843B1/en active Active
- 2022-02-14 DK DK22156546.8T patent/DK4056843T3/da active
- 2022-03-11 CN CN202210244424.7A patent/CN115076045A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP4056843B1 (en) | 2023-10-04 |
| DK4056843T3 (da) | 2023-11-20 |
| US11774324B2 (en) | 2023-10-03 |
| EP4056843A1 (en) | 2022-09-14 |
| US20220291084A1 (en) | 2022-09-15 |
| ES2967323T3 (es) | 2024-04-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DK177769B1 (en) | Methods and apparatus for detecting ice on a rotor vane | |
| EP3023635B1 (en) | System and method for monitoring and controlling wind turbine blade deflection | |
| JP6407592B2 (ja) | 風力発電装置の異常診断装置および異常診断方法 | |
| US9366230B2 (en) | System and method for reducing loads acting on a wind turbine in response to transient wind conditions | |
| US8210811B2 (en) | Apparatus and method for operation of a wind turbine | |
| CN102032114B (zh) | 用于控制风力涡轮的声发射的方法和设备 | |
| CN203685475U (zh) | 风力涡轮机控制系统及风力涡轮机系统 | |
| CN101542116B (zh) | 风力发电装置 | |
| EP3309389B1 (en) | Verification of wind turbine nacelle yaw position sensor | |
| US11098698B2 (en) | System and method for auto-calibrating a load sensor system of a wind turbine | |
| EP3599375A1 (en) | System and method for protecting wind turbines during extreme wind direction change | |
| CN110608134A (zh) | 控制风力涡轮以最大限度减小转子叶片损坏的系统和方法 | |
| EP4056843B1 (en) | System and method for detecting actual slip in a coupling of a rotary shaft | |
| CN116241413A (zh) | 用于在涡轮转子的锁定状态中控制风力涡轮转子叶片上的叶片桨距以减少振动的系统和方法 | |
| CN116241412A (zh) | 用于在转子毂的空转状态下控制风力涡轮转子叶片的叶片桨距的系统和方法 | |
| JP2022107523A (ja) | 風の乱流のアクティブセンシングを用いた風力タービンのための推力制御 | |
| US11913429B2 (en) | System and method for slip detection and surface health monitoring in a slip coupling of a rotary shaft | |
| CN113565700B (zh) | 基于变桨系统的风机叶片状态在线监测装置及方法 | |
| US20240068442A1 (en) | System and method for detecting and responding to rotor blade damage in a wind turbine | |
| US20240133360A1 (en) | Protection of wind turbine components during yawing | |
| EP4361434A1 (en) | Protection of wind turbine components during yawing | |
| US20230147218A1 (en) | Methods and systems for determining roughness of wind turbine blades and wind turbine control | |
| CN117980713A (zh) | 用于控制资产系列的工业资产的系统和方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |