CN113682218A - 一种集装箱搬运系统及搬运方法 - Google Patents
一种集装箱搬运系统及搬运方法 Download PDFInfo
- Publication number
- CN113682218A CN113682218A CN202110971444.XA CN202110971444A CN113682218A CN 113682218 A CN113682218 A CN 113682218A CN 202110971444 A CN202110971444 A CN 202110971444A CN 113682218 A CN113682218 A CN 113682218A
- Authority
- CN
- China
- Prior art keywords
- container
- handling
- assembly
- lifting
- controllers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60P—VEHICLES ADAPTED FOR LOAD TRANSPORTATION OR TO TRANSPORT, TO CARRY, OR TO COMPRISE SPECIAL LOADS OR OBJECTS
- B60P1/00—Vehicles predominantly for transporting loads and modified to facilitate loading, consolidating the load, or unloading
- B60P1/02—Vehicles predominantly for transporting loads and modified to facilitate loading, consolidating the load, or unloading with parallel up-and-down movement of load supporting or containing element
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D11/00—Steering non-deflectable wheels; Steering endless tracks or the like
- B62D11/02—Steering non-deflectable wheels; Steering endless tracks or the like by differentially driving ground-engaging elements on opposite vehicle sides
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D63/00—Motor vehicles or trailers not otherwise provided for
- B62D63/06—Trailers
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0016—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement characterised by the operator's input device
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0027—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement involving a plurality of vehicles, e.g. fleet or convoy travelling
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Computing Systems (AREA)
- Mathematical Physics (AREA)
- Theoretical Computer Science (AREA)
- Handcart (AREA)
Abstract
本发明公开了一种集装箱搬运系统及搬运方法,涉及集装箱搬运技术领域,包括集装箱和可拆卸设置在集装箱四角处处能够带动集装箱移动和升降的四个复合搬运小车,所述四个复合搬运小车上均设置有控制自身升降和移动的控制器,四个控制器相互电连接,其中一个控制器为主控制器,主控制器通过其他三个控制器使集装箱实现同步升降,位于集装箱任一一端的两个复合搬运小车之间设置有连接件,连接件上通过拖挂组件连接有牵引车;本发明结构简单、转运灵活高效、成本低及升降平稳的优点。
Description
技术领域
本发明涉及集装箱搬运技术领域,更具体的是涉及集装箱搬运系统及搬运方法技术领域。
背景技术
现有的集装箱在运输过程中通常使用平板牵引车来装载或者通过吊车来吊装,平板牵引装载和吊车吊装均存在成本高同时占地面积大的缺陷且平板车存在上下集装箱费时费力费钱的缺陷,同时现有的吊车、平板牵引车存在稳定性不强、不便于升降、转向不便且转运成本高的缺点,特别在空间有限的码头或者其他集散地,大型的平板牵引车和吊车不能使用。
故设计一种体积小、灵活性强且便于升降的转运系统很有现实意义。
发明内容
本发明的目的在于:为了解决上述技术问题,本发明提供一种集装箱搬运系统及搬运方法。
本发明为了实现上述目的具体采用以下技术方案:
一种集装箱搬运系统,包括集装箱和可拆卸设置在集装箱四角处处能够带动集装箱移动和升降的四个复合搬运小车,所述四个复合搬运小车上均设置有控制自身升降和移动的控制器,四个控制器相互电连接,其中一个控制器为主控制器,主控制器通过其他三个控制器使集装箱实现同步升降,位于集装箱任一一端的两个复合搬运小车之间设置有连接件,连接件上通过拖挂组件连接有牵引车。
复合搬运小车包括底部的行走机构、设置在行走机构上的旋转机构、设置在旋转机构上的升降柱组件、套设在升降柱组件上的安装套和固定设置在安装套上与集装箱可拆卸连接的连接座,所述行走机构上设置有增加续航能力的发电机,行走机构上还设置有与行走机构、旋转机构、升降柱组件和发电机均电连接的控制器。
更优地,所述控制器和直流变频发电机层叠设置,且控制器上还设置有便于人工操作的控制面板,所述行走机构上靠近控制面板处还设置有便于操作人员站立的且便于收纳的折叠板。
更优地,所述升降柱组件包括固定设置旋转机构上方的安装座、设置在安装座上的电动缸或者液压缸、套设在电动缸或者液压缸外能沿电动缸或者液压缸升降的顶部封口的升降外套,所述安装套固定设置在升降外套上。
更优地,所述行走机构为三轮行走组件,行走机构包括车底板和设置在车底板的主动轮组件和从动轮组件,所述从动轮组件为高度可以调节的万向轮组件,所述主动轮组件包括对称设置在车底板两侧的且单独控制的主动车轮A和主动车轮B。
一种集装箱搬运方法,包括如下步骤:
步骤1、把四个复合搬运小车可拆卸的安装在集装箱的四角的预留孔上;
步骤2、收起四个复合搬运小车的从动轮组件使集装箱和四个复合搬运小车构成一个的稳定性移动集装箱箱组件;
步骤3、使四个复合搬运小车的控制器电连接,其中一个为主控制器,主控制器控制其他三个控制器实现集装箱的同步升降,集装箱升降到合适高度停止升降;
步骤4、集装箱一端的两个复合搬运小车通过连接件连接起来,在通过拖挂组件与牵引车头连接,构成拖挂整体;
步骤5、牵引车头通过拖挂组件实现集装箱的搬运。
本发明的有益效果如下:
1、本发明设计合理,通过主控制器控制四个复合搬运小车同步控制升降,使集装箱升降平稳,升降到合适位置时,停止升降,在通过牵引车头带动集装箱按需求移动到指定位置,该集装箱搬运方法占地位置小、灵活性强、转运高效、便于调整集装箱高度的优点。
2、本发明设计合理,复合搬运小车主要由行走机构、转动机构、升降机构、安装座、发电机和控制器构成,具有占地面积小、稳定向强、方便带动安装座转动和升降、自动化程度高、发电机的设置能增加小车续航能的优点,自动化成都高可以通过遥控器人工随车控制或PC端远程控制集装箱小车上的控制器。
3、由于控制器及小车其他部件的阻挡,设定转动机构能沿竖直方向正负 60°的转动,转动机构转动角度能够达到120°,即实现了转动机构带动安装座120°范围内的转动;当小车的安装座与集装箱连接后,故在转动机构转动时,由于集装箱太重,故与集装箱连接的安装座不能转动,转动机构带动小车的车体转动,当车体转动到需要的位后通过停止转动,当车体90°的转动可以实现集装箱的横纵和纵向移动,具有较强的灵活性。
4、由于主动轮组件由单独控制的主动车轮A和主动车轮B构成,在小车需要直行驶,控制主动车轮A和主动车轮B转速一致,使小车直行;当小车需要转弯或者掉头时,使主动车轮A和主动车轮B转速存在转速差,这种单独控制的设置使小车具有更强的灵活性。
5、从动轮组件为高度可以调节的万向轮组件,这种结构的从动轮设置使小车适用于不同的工况,当小车单独使用时,使从动轮组件和主动轮组件的底部平齐,构成一个三轮行走机构;当小车与集装箱配合使用时,即四个小车与集装箱可拆卸连接时,每个小车的从动轮组件均向上收起,不与地面接触,使之成为两轮行走机构,增加集装箱转运的灵活性。
附图说明
图1是本发明的示意图;
图2是搬运小车的结构示意图;
图3是图2的另一个视角的结构示意图;
图4是图2的一个向视图;
图5是图4的俯视图;
图6是图4的左视图;
图7是图4A-A处的剖视图
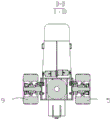
图8是图5B-B处的剖视图;
图9是图5C-C处的剖视图;
图10是图4D-D处的剖视图;
图11是图4E-E处的剖视图;
图12是安装套和连接座的结构示意图;
图13是图1的局部结构示意图;
附图标记:1-升降柱组件,1-1-安装座,1-2-电动缸,1-3-升降外套,2- 连接座,2-1-三角形加强块,2-2-安装板,2-3-螺栓组件,3-安装套,3-1-U 型槽,4-旋转机构,5-主动车轮A,6-从动轮组件,7-折叠板,8-控制器,9- 主动车轮B。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
在本发明实施方式的描述中,需要说明的是,术语“内”、“外”、“上”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1
如图1到12所示,本实施例提供一种集装箱搬运系统,包括集装箱和可拆卸设置在集装箱四角处处能够带动集装箱移动和升降的四个复合搬运小车,所述四个复合搬运小车上均设置有控制自身升降和移动的控制器,四个控制器相互电连接,其中一个控制器为主控制器,主控制器通过其他三个控制器使集装箱实现同步升降,位于集装箱任一一端的两个复合搬运小车之间设置有连接件,连接件上通过拖挂组件连接有牵引车。
复合搬运小车包括底部的行走机构、设置在行走机构上的旋转机构4、设置在旋转机构4上的升降柱组件1、套设在升降柱组件1上的安装套3和固定设置在安装套3上与集装箱可拆卸连接的连接座2,所述行走机构上设置有增加续航能力的发电机,行走机构上还设置有与行走机构、旋转机构4、升降柱组件1和发电机均电连接的控制器8。
所述发电机为直流变频发电机。
所述控制器8和直流变频发电机层叠设置,且控制器8上还设置有便于人工操作的控制面板,所述行走机构上靠近控制面板处还设置有便于操作人员站立的且便于收纳的折叠板7。
所述旋转机构4为转动平台,且转动平台的转动角度为-60°~60°。
由于控制器及小车其他部件的阻挡,设定转动机构能沿竖直方向正负60°的转动,转动机构转动角度能够达到120°,即实现了转动机构带动安装座 120°范围内的转动;当小车的安装座与集装箱连接后,故在转动机构转动时,由于集装箱太重,故与集装箱连接的安装座不能转动,转动机构带动小车的车体转动,当车体转动到需要的位后通过停止转动,当车体90°的转动可以实现集装箱的横纵和纵向移动,小车具有较强的灵活性。
所述控制器通过遥控器人工随车控制或PC端远程控制。
本实施例设计的转运小车主要由行走机构、转动机构、升降机构、安装座、发电机和控制器构成,具有占地面积小、稳定向强、方便带动安装座转动和升降、自动化程度高、发电机的设置能增加小车续航能的优点,自动化成都高可以通过遥控器人工随车控制或PC端远程控制集装箱小车上的控制器。
转运集装箱时,需要四个本发明所述的小车来夹持集装箱的四条棱边,实现集装箱的中移动和升降,传统的拖车或者吊车占据空间大,不适用于空间有限的码头或者其他集散地,本发明设计的小车体积小适用于空间有限的集装箱转运。
所述升降柱组件1包括固定设置旋转机构上方的安装座1-1、设置在安装座1-1上的电动缸1-2或者液压缸、套设在电动缸1-2或者液压缸外能沿电动缸1-2或者液压缸升降的顶部封口的升降外套1-3,所述安装套3固定设置在升降外套1-3上。
所述升降外套1-3外观为方形柱,所述安装套3为方形块,且安装套3一侧开设有与方形柱形状适配的U型槽3-1。
所述连接座2包括竖直设置在安装套3外侧的安装板2-2,安装板2-2上下两端均延伸出安装套3,延伸出安装套3的安装板2-2两端上均设置有与集装箱可拆卸连接的螺栓组件2-3,所述安装套3上下两端均设置有与安装板2-2 连接的三角形加强块2-1。
所述行走机构为三轮行走组件,行走机构包括车底板和设置在车底板的主动轮组件和从动轮组件6,所述从动轮组件6为高度可以调节的万向轮组件,所述主动轮组件包括对称设置在车底板两侧的且单独控制的主动车轮A5和主动车轮B9。
所述主动轮组件位于升降柱组件1侧,从动轮组件6位于控制器8一侧。
所述万向轮组件包括与车底板连接的伸缩机构和设置在伸缩机构底部的万向轮。
伸缩机构为电动缸、升降套筒或气缸中的一种。
本实施例中,由于主动轮组件由单独控制的主动车轮A和主动车轮B构成,在小车需要直行驶,控制主动车轮A和主动车轮B转速一致,使小车直行;当小车需要转弯或者掉头时,使主动车轮A和主动车轮B转速存在转速差,这种单独控制的设置使小车具有更强的灵活性。
从动轮组件为高度可以调节的万向轮组件,这种结构的从动轮设置使小车适用于不同的工况,当小车单独使用时,使从动轮组件和主动轮组件的底部平齐,构成一个三轮行走机构;当小车与集装箱配合使用时,即四个小车与集装箱可拆卸连接时,每个小车的从动轮组件均向上收起,不与地面接触,使之成为两轮行走机构,增加集装箱转运的灵活性。
实施例2
一种集装箱搬运方法,包括如下步骤:
步骤1、把四个复合搬运小车可拆卸的安装在集装箱的四角的预留孔上;
步骤2、收起四个复合搬运小车的从动轮组件使集装箱和四个复合搬运小车构成一个的稳定性移动集装箱箱组件;
步骤3、使四个复合搬运小车的控制器电连接,其中一个为主控制器,主控制器控制其他三个控制器实现集装箱的同步升降,集装箱升降到合适高度停止升降;
步骤4、集装箱一端的两个复合搬运小车通过连接件连接起来,在通过拖挂组件与牵引车头连接,构成拖挂整体;
步骤5、牵引车头通过拖挂组件实现集装箱的搬运。
Claims (5)
1.一种集装箱搬运系统,其特征在于,包括集装箱和可拆卸设置在集装箱四角处处能够带动集装箱移动和升降的四个复合搬运小车,所述四个复合搬运小车上均设置有控制自身升降和移动的控制器,四个控制器相互电连接,其中一个控制器为主控制器,主控制器通过其他三个控制器使集装箱实现同步升降,位于集装箱任一一端的两个复合搬运小车之间设置有连接件,连接件上通过拖挂组件连接有牵引车。
复合搬运小车包括底部的行走机构、设置在行走机构上的旋转机构(4)、设置在旋转机构(4)上的升降柱组件(1)、套设在升降柱组件(1)上的安装套(3)和固定设置在安装套(3)上与集装箱可拆卸连接的连接座(2),所述行走机构上设置有增加续航能力的发电机,行走机构上还设置有与行走机构、旋转机构(4)、升降柱组件(1)和发电机均电连接的控制器(8)。
2.根据权利要求1所述的一种用于搬运集装箱的组合式转运小车,其特征在于,所述控制器(8)和直流变频发电机层叠设置,且控制器(8)上还设置有便于人工操作的控制面板,所述行走机构上靠近控制面板处还设置有便于操作人员站立的且便于收纳的折叠板(7)。
3.根据权利要求1所述的一种用于搬运集装箱的组合式转运小车,其特征在于,所述升降柱组件(1)包括固定设置旋转机构上方的安装座(1-1)、设置在安装座(1-1)上的电动缸(1-2)或者液压缸、套设在电动缸(1-2)或者液压缸外能沿电动缸(1-2)或者液压缸升降的顶部封口的升降外套(1-3),所述安装套(3)固定设置在升降外套(1-3)上。
4.根据权利要求1所述的一种用于搬运集装箱的组合式转运小车,其特征在于,所述行走机构为三轮行走组件,行走机构包括车底板和设置在车底板的主动轮组件和从动轮组件(6),所述从动轮组件(6)为高度可以调节的万向轮组件,所述主动轮组件包括对称设置在车底板两侧的且单独控制的主动车轮A(5)和主动车轮B(9)。
5.一种集装箱搬运方法,采用权利要求4所述的一种集装箱搬运系统,其特征在于,包括如下步骤:
步骤1、把四个复合搬运小车可拆卸的安装在集装箱的四角的预留孔上;
步骤2、收起四个复合搬运小车的从动轮组件使集装箱和四个复合搬运小车构成一个的稳定性移动集装箱箱组件;
步骤3、使四个复合搬运小车的控制器电连接,其中一个为主控制器,主控制器控制其他三个控制器实现集装箱的同步升降,集装箱升降到合适高度停止升降;
步骤4、集装箱一端的两个复合搬运小车通过连接件连接起来,在通过拖挂组件与牵引车头连接,构成拖挂整体;
步骤5、牵引车头通过拖挂组件实现集装箱的搬运。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110971444.XA CN113682218A (zh) | 2021-08-23 | 2021-08-23 | 一种集装箱搬运系统及搬运方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110971444.XA CN113682218A (zh) | 2021-08-23 | 2021-08-23 | 一种集装箱搬运系统及搬运方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113682218A true CN113682218A (zh) | 2021-11-23 |
Family
ID=78581647
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110971444.XA Pending CN113682218A (zh) | 2021-08-23 | 2021-08-23 | 一种集装箱搬运系统及搬运方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113682218A (zh) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002254975A (ja) * | 2001-02-28 | 2002-09-11 | National Agricultural Research Organization | 重量収穫物のハンドリング搬送装置 |
| JP2004338521A (ja) * | 2003-05-15 | 2004-12-02 | Kamei Shinichiro | コンテナ運搬車両 |
| CN108045405A (zh) * | 2017-12-11 | 2018-05-18 | 大连四达高技术发展有限公司 | 自行式集装箱搬运系统 |
| CN112627606A (zh) * | 2020-12-14 | 2021-04-09 | 深圳闪移技术有限责任公司 | 汽车搬运机器及其控制方法 |
| CN112722611A (zh) * | 2020-12-31 | 2021-04-30 | 四川东泉机械设备制造有限公司 | 一种集装箱掀盖机及其操作方法 |
| CN112850567A (zh) * | 2020-12-31 | 2021-05-28 | 四川东泉机械设备制造有限公司 | 一种升降搬运小车及集装箱掀盖机 |
| CN216300897U (zh) * | 2021-08-23 | 2022-04-15 | 四川东泉机械设备制造有限公司 | 一种集装箱搬运系统 |
-
2021
- 2021-08-23 CN CN202110971444.XA patent/CN113682218A/zh active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002254975A (ja) * | 2001-02-28 | 2002-09-11 | National Agricultural Research Organization | 重量収穫物のハンドリング搬送装置 |
| JP2004338521A (ja) * | 2003-05-15 | 2004-12-02 | Kamei Shinichiro | コンテナ運搬車両 |
| CN108045405A (zh) * | 2017-12-11 | 2018-05-18 | 大连四达高技术发展有限公司 | 自行式集装箱搬运系统 |
| CN112627606A (zh) * | 2020-12-14 | 2021-04-09 | 深圳闪移技术有限责任公司 | 汽车搬运机器及其控制方法 |
| CN112722611A (zh) * | 2020-12-31 | 2021-04-30 | 四川东泉机械设备制造有限公司 | 一种集装箱掀盖机及其操作方法 |
| CN112850567A (zh) * | 2020-12-31 | 2021-05-28 | 四川东泉机械设备制造有限公司 | 一种升降搬运小车及集装箱掀盖机 |
| CN216300897U (zh) * | 2021-08-23 | 2022-04-15 | 四川东泉机械设备制造有限公司 | 一种集装箱搬运系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20030180132A1 (en) | Mobile lift | |
| CN207173417U (zh) | 一种方舱升降机构和自装卸式消防方舱 | |
| CN107188088B (zh) | 组合装卸装置以及集装箱内超重或超长物体的装卸方法 | |
| CN207404532U (zh) | 自行式集装箱翻转车 | |
| CN107601077A (zh) | 自行式集装箱翻转车 | |
| CN110154862B (zh) | 全转向防爆蓄电池转运车 | |
| CN202704878U (zh) | 野外集装箱正面吊装置 | |
| CN216300897U (zh) | 一种集装箱搬运系统 | |
| CN113942852A (zh) | 一种集装箱搬运小车装卸方法 | |
| CN113682218A (zh) | 一种集装箱搬运系统及搬运方法 | |
| CN206858071U (zh) | 组合装卸装置 | |
| CN109384162B (zh) | 一种龙门式构件运输车及构件运输方法 | |
| CN217753594U (zh) | 一种应急救援用吊运平台 | |
| CN215160449U (zh) | 一种带曲臂起重装置的小型搬运车 | |
| CN216303169U (zh) | 一种用于搬运集装箱的组合式搬运小车 | |
| CN203451173U (zh) | 理货机 | |
| CN203568784U (zh) | 短轴距平衡重式堆垛车 | |
| CN216301292U (zh) | 一种用于搬运集装箱的组合式转运小车 | |
| CN205616522U (zh) | 方舱转运装置 | |
| CN206842916U (zh) | 多功能越障转运吊装电动车 | |
| CN215886242U (zh) | 智能搬运车 | |
| CN204956955U (zh) | 大型航天器总装与转运一体化平台 | |
| CN223421500U (zh) | 用于超长型货物的转运装置 | |
| CN114180489A (zh) | 一种自登机平台举升车 | |
| CN113148862B (zh) | 带曲臂起重装置的小型搬运车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20211123 |
|
| RJ01 | Rejection of invention patent application after publication |