CN113649835A - 一种数控加工中心夹具 - Google Patents
一种数控加工中心夹具 Download PDFInfo
- Publication number
- CN113649835A CN113649835A CN202110996743.9A CN202110996743A CN113649835A CN 113649835 A CN113649835 A CN 113649835A CN 202110996743 A CN202110996743 A CN 202110996743A CN 113649835 A CN113649835 A CN 113649835A
- Authority
- CN
- China
- Prior art keywords
- plate
- main body
- top end
- machining center
- shaped structure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23Q—DETAILS, COMPONENTS, OR ACCESSORIES FOR MACHINE TOOLS, e.g. ARRANGEMENTS FOR COPYING OR CONTROLLING; MACHINE TOOLS IN GENERAL CHARACTERISED BY THE CONSTRUCTION OF PARTICULAR DETAILS OR COMPONENTS; COMBINATIONS OR ASSOCIATIONS OF METAL-WORKING MACHINES, NOT DIRECTED TO A PARTICULAR RESULT
- B23Q3/00—Devices holding, supporting, or positioning work or tools, of a kind normally removable from the machine
- B23Q3/02—Devices holding, supporting, or positioning work or tools, of a kind normally removable from the machine for mounting on a work-table, tool-slide, or analogous part
- B23Q3/06—Work-clamping means
Abstract
本发明提供一种数控加工中心夹具,涉及夹具领域,以解决现有的加工中心夹具在使用的时候,与物体接触夹紧的时候,缺少防滑机构,无法根据需求便捷安装防滑固定机构的问题,包括主体;所述主体为T形结构,主体的顶端前后两侧设有矩形板,主体的内部安装有电动缸,电动缸的顶端连接有拉杆,拉杆安装在主体的顶端,主体的顶端安装有移动板;插件,所述插件为T形结构,插件插入在插槽的内部。翻转臂受力翻转夹紧工件的时候,插件可以跟随一起移动,进而使橡胶材质的接触件可以提前与工件接触,进而使接触件可以自适应变形,同时可以进行防滑接触,使翻转臂夹紧之后,工件可以更加稳固,不会在加工的时候出现位移以及滑动。
Description
技术领域
本发明属于夹具技术领域,更具体地说,特别涉及一种数控加工中心夹具。
背景技术
数控加工中心在使用的时候,通常需要搭配夹具使用,进而使夹具可以便捷的夹住工件,进而便于数控中心进行加工。
例如一种数控加工中心夹具,包括定位轴、基体、薄壁套、介质,其特征在于:基体通过螺丝紧固在定位轴上,基体与薄壁套之间采用过盈配合,在基体和薄壁套内部设有介质,介质通过基体顶端螺丝向下压紧力的作用下,将薄壁套外壁涨起,使工件与薄壁套紧固在一起。本发明结构简单、装缷方便、校准准确、安装简单方便,可适用于压缩机缸套、轴瓦衬套和异形圆筒工件等小批量生产过程中,在数控加工中心上一次装夹加工完成,提高加工精度,减少因多次装夹而产生的误差。
现有的加工中心夹具在使用的时候,与物体接触夹紧的时候,缺少防滑机构,无法根据需求便捷安装防滑固定机构,且现有的加工中心夹具在使用的时候,在对工件取消夹紧的时候,无法自动推动工件位移,无法使工件自动脱离。
发明内容
为了解决上述技术问题,本发明提供一种数控加工中心夹具,以解决现有的加工中心夹具在使用的时候,与物体接触夹紧的时候,缺少防滑机构,无法根据需求便捷安装防滑固定机构,且现有的加工中心夹具在使用的时候,在对工件取消夹紧的时候,无法自动推动工件位移,无法使工件自动脱离的问题。
本发明一种数控加工中心夹具的目的与功效,由以下具体技术手段所达成:
一种数控加工中心夹具,包括:主体;所述主体为T形结构,主体的顶端前后两侧设有矩形板,主体的内部安装有电动缸,电动缸的顶端连接有拉杆,拉杆安装在主体的顶端,主体的顶端安装有移动板;插件,所述插件为T形结构,插件插入在插槽的内部;移动板,所述移动板包括有受力位移机构,移动板的两端安装有受力位移机构,移动板为矩形板状结构,移动板处于侧板之间,移动板的底部与电动缸的顶端连接。
进一步的,所述主体包括:导槽,导槽为矩形结构,导槽的前端为倾斜状结构,导槽开设在主体的顶端前后两侧;导向孔,导向孔为圆柱形结构,导向孔共设有四个,四个导向孔设在主体的顶端;所述主体还包括:侧板,侧板为矩形板状结构,侧板的顶端为楔形结构,侧板固定在主体的顶端两侧;控制槽,控制槽为T形结构,控制槽设在侧板的内侧两端;所述主体还包括:翻转臂,翻转臂为L形结构,翻转臂的底部与拉杆的外端连接;插槽,插槽为T形结构,插槽设在翻转臂的顶端;挡块,挡块为U形结构,挡块的顶端内侧为倾斜状结构,挡块固定在翻转臂的顶端。
进一步的,所述插件包括:安装槽,安装槽为T形结构,安装槽开设在插件的顶端;卡块,卡块为T形结构,卡块的顶端为楔形结构,卡块通过弹簧安装在安装槽的内部;所述插件还包括:支撑板,支撑板为U形结构,支撑板固定在插件的顶端两侧;安装杆,安装杆为圆柱形结构,安装杆设在支撑板的底部;所述插件还包括:接触件,接触件为圆柱形管状结构,接触件为橡胶材质,接触件的外侧设有均匀排列的圆孔,接触件套在安装杆的挖外侧;辅助板,辅助板为弧形板状结构,辅助板固定在接触件的两端,辅助板为橡胶材质。
进一步的,所述移动板包括:移动槽,移动槽为T形结构,移动槽开设在移动板的两端;受力板,受力板为矩形板状结构,受力板的左侧设有中间凸起圆柱形结构的圆杆,圆杆的外侧套装有弹簧,受力板设在移动板的底部中间位置以及底部右侧;所述移动板还包括:导向杆,导向杆为中间凸起的圆柱形结构,导向杆的外侧套装有弹簧,导向杆共设有四个,四个导向杆固定在移动板的底部,四个导向杆插入在四个导向孔内部;控制板,控制板为板状结构,控制板共设有四个,控制板固定在移动板的底部两侧,控制板的外侧设有T形块,T形块插入在控制槽的内部;所述移动位移机构包括:底板,底板为T形板状结构,底板嵌入在移动槽的底部;顶板,顶板为矩形板状结构,顶板的顶端设有均匀排列的楔形块,顶板为橡胶材质,顶板固定在底板的顶端,顶板嵌入在移动槽的内部顶端;插板,插板为T形板状结构,插板固定在底板的底部,插板的内部设有圆孔,圆孔内部插入到导向杆,插板的底部为楔形结构,插板的底部插入在导槽的内部。
与现有技术相比,本发明具有如下有益效果:
1、在本装置中,设置了插件,插件是用来插入在插槽内部的,进而使插件可以与翻转臂便捷连接在一起,同时卡块可以接收弹簧动力向外移动,进而与挡块接触,使插件可以稳固安装使用,使插件安装之后,可以带动支撑板以及接触件一起安装,使翻转臂受力翻转夹紧工件的时候,插件可以跟随一起移动,进而使橡胶材质的接触件可以提前与工件接触,进而使接触件可以自适应变形,同时可以进行防滑接触,使翻转臂夹紧之后,工件可以更加稳固,不会在加工的时候出现位移以及滑动;
2、在本装置中,设置了移动板,移动板是用来安装在主体的内部移动的,使电动缸收缩,使翻转臂固定工件的时候,移动板可以与工件一起向下移动,移动板在移动的同时,可以使插板插入在导槽的内部,进而受力位移,使底板以及顶板可以向后移动,同时工件被夹紧之后,可以与顶板的顶端防滑接触固定,进而使工件可以稳固安装,而当工件加工完成之后,电动杆伸出,使工件可以被解除固定,同时移动板接收弹簧动力向上移动,同时顶板跟随上升,在上升的过程中,可以通过插板接收弹簧动力位移,进而向前方移动,使顶板可以带动工件一起向前方移动,进而使物料可以被自动推动位移,使下一个工件可以便捷放入加工。
附图说明
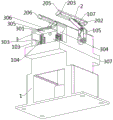
图1是本发明的立体结构示意图。
图2是本发明的仰视结构示意图。
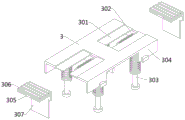
图3是本发明的分解立体结构示意图。
图4是本发明的分解仰视结构示意图。
图5是本发明的主体立体及局部放大结构示意图。
图6是本发明的插件分解立体结构示意图。
图7是本发明的移动板仰视结构示意图。
图8是本发明的移动板分解立体结构示意图。
图中,部件名称与附图编号的对应关系为:
1、主体;101、导槽;102、导向孔;103、侧板;104、控制槽;105、翻转臂;106、插槽;107、挡块;2、插件;201、安装槽;202、卡块;203、支撑板;204、安装杆;205、接触件;206、辅助板;3、移动板;301、移动槽;302、受力板;303、导向杆;304、控制板;305、底板;306、顶板;307、插板。
具体实施方式
下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
实施例:
如附图1至附图8所示:
本发明提供一种数控加工中心夹具,包括主体1;主体1为T形结构,主体1的顶端前后两侧设有矩形板,主体1的内部安装有电动缸,电动缸的顶端连接有拉杆,拉杆安装在主体1的顶端,主体1的顶端安装有移动板3;插件2,插件2为T形结构,插件2插入在插槽106的内部,插件2起到了与翻转臂105连接的作用,进而跟随翻转臂105进行翻转,使接触件205可以跟随接触固定;移动板3,移动板3包括有受力位移机构,移动板3的两端安装有受力位移机构,移动板3为矩形板状结构,移动板3处于侧板103之间,移动板3的底部与电动缸的顶端连接,移动板3起到了与工件一起上下移动的作用,同时可以推动工件便捷位移。
如图8所示,移动位移机构包括:底板305,底板305为T形板状结构,底板305嵌入在移动槽301的底部,底板305起到了带动顶板306一起移动的作用,同时可以与插板307进行连接,进而接收插板307的动力位移;顶板306,顶板306为矩形板状结构,顶板306的顶端设有均匀排列的楔形块,顶板306为橡胶材质,顶板306固定在底板305的顶端,顶板306起到了与工件接触的作用,进而带动工件便捷位移,顶板306嵌入在移动槽301的内部顶端;插板307,插板307为T形板状结构,插板307固定在底板305的底部,插板307的内部设有圆孔,圆孔内部插入到导向杆303,插板307的底部为楔形结构,插板307的底部插入在导槽101的内部,插板307起到了插入到导槽101内部的作用,进而使顶板306可以位移,同时也起到了接收圆杆外侧弹簧的动力,进而顶板306可以推动工件移动。
如图5所示,其中,主体1包括:导槽101,导槽101为矩形结构,导槽101的前端为倾斜状结构,导槽101是在插板307插入的时候,可以控制插板307进行位移,导槽101开设在主体1的顶端前后两侧;导向孔102,导向孔102为圆柱形结构,导向孔102共设有四个,四个导向孔102设在主体1的顶端,导向孔102起到了插入安装导向杆303的作用,使导向杆303外侧的弹簧可以支撑移动板3导向移动;主体1还包括:侧板103,侧板103为矩形板状结构,侧板103的顶端为楔形结构,侧板103起到了处于主体1两侧使用的作用,进而辅助安装移动板3,侧板103固定在主体1的顶端两侧;控制槽104,控制槽104为T形结构,控制槽104设在侧板103的内侧两端,控制槽104起到了使控制板304的T形块插入的作用,进而使主体1可以导向位移;主体1还包括:翻转臂105,翻转臂105为L形结构,翻转臂105的底部与拉杆的外端连接,翻转臂105起到了接收电动缸以及拉杆动力翻转的作用,进而将工件夹住加工;插槽106,插槽106为T形结构,插槽106设在翻转臂105的顶端,插槽106起到了插入安装插件2的作用,使插件2可以便捷安装使用;挡块107,挡块107为U形结构,挡块107的顶端内侧为倾斜状结构,挡块107固定在翻转臂105的顶端,挡块107起到了与卡块202接触的作用,使插件2安装之后,可以被便捷固定。
如图7所示,其中,移动板3包括:移动槽301,移动槽301为T形结构,移动槽301开设在移动板3的两端,移动槽301起到了安装底板305以及顶板306的作用,使其可以导向移动;受力板302,受力板302为矩形板状结构,受力板302的左侧设有中间凸起圆柱形结构的圆杆,圆杆的外侧套装有弹簧,受力板302设在移动板3的底部中间位置以及底部右侧,受力板302起到了通过圆杆安装插板307的作用,使圆杆外侧的弹簧可以推动插板307移动;移动板3还包括:导向杆303,导向杆303为中间凸起的圆柱形结构,导向杆303的外侧套装有弹簧,导向杆303起到了控制移动板3导向移动的作用,同时导向杆303外侧的弹簧可以辅助支撑移动板3复位,导向杆303共设有四个,四个导向杆303固定在移动板3的底部,四个导向杆303插入在四个导向孔102内部;控制板304,控制板304为板状结构,控制板304共设有四个,控制板304固定在移动板3的底部两侧,控制板304的外侧设有T形块,T形块插入在控制槽104的内部,控制板304起到了辅助支撑移动板3的作用。
如图6所示,其中,插件2包括:安装槽201,安装槽201为T形结构,安装槽201开设在插件2的顶端,安装槽201起到了通过弹簧安装卡块202的作用,使卡块202可以接收弹簧动力位移;卡块202,卡块202为T形结构,卡块202的顶端为楔形结构,卡块202是在插件2安装之后,可以与挡块107接触,进而将插件2固定住,使插件2不会出现位移,卡块202通过弹簧安装在安装槽201的内部;插件2还包括:支撑板203,支撑板203为U形结构,支撑板203固定在插件2的顶端两侧,支撑板203起到了辅助支撑安装杆204以及接触件205的作用;安装杆204,安装杆204为圆柱形结构,安装杆204设在支撑板203的底部,安装杆204起到了辅助支撑接触件205的作用;插件2还包括:接触件205,接触件205为圆柱形管状结构,接触件205为橡胶材质,接触件205的外侧设有均匀排列的圆孔,接触件205起到了直接与工件接触的作用,进而进行防滑固定,接触件205套在安装杆204的挖外侧;辅助板206,辅助板206为弧形板状结构,辅助板206固定在接触件205的两端,辅助板206为橡胶材质,辅助板206起到了对接触件205限位的作用,使接触件205在使用的时候,不会出现转动。
作为本发明实施例的另一种实施方式,在工件表面比较粗糙的时候,可以不用安装插件2,使翻转臂105可以通过自身与工件接触固定,使工件可以稳固夹紧。
使用时:当需要使用本装置的时候,可以先通过人力控制插件2插入到插槽106的内部,使卡块202被压缩之后,可以向外移动,进而与挡块107的侧边接触,进而使插件2可以被稳固的固定安装限位,然后将另一个插件2安装使用,当工件放入到移动板3顶端之后,可以通过人力控制电动缸内缩,使电动缸通过拉杆控制翻转臂105进行翻转,使翻转臂105可以带动插件2一起移动,使得接触件205可以直接与物体接触,进而进行防滑固定,使接触件205被压缩之后,翻转臂105再与工件接触,进而进行加强固定,翻转臂105在夹紧的时候,移动板3跟随电动缸向下移动,同时插板307插入到到导槽101的内部,使底板305以及顶板306可以向后移动,在顶板306移动的过程中,由于工件先与接触件205接触,使得顶板306移动的时候,不会对工件产生位移,同时顶板306顶端的楔形杆块为顺向移动,使工件不会受力位移,当工件加工完成之后,电动缸深处,移动板3向上移动,翻转臂105向外翻转,使工件可以被解除固定,在解除的同时,插板307接收受力板302圆杆外侧弹簧的动力位移,进而使顶板306可以通过楔形块一起推动工件,进而使工件可以自动从移动板3的顶端脱离,使下一个工件可以便捷放入,可以便捷进行夹紧。
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
Claims (10)
1.一种数控加工中心夹具,其特征在于,加工中心夹具包括:
主体(1);
所述主体(1)为T形结构,主体(1)的顶端前后两侧设有矩形板,主体(1)的内部安装有电动缸,电动缸的顶端连接有拉杆,拉杆安装在主体(1)的顶端,主体(1)的顶端安装有移动板(3);插件(2),所述插件(2)为T形结构,插件(2)插入在插槽(106)的内部;移动板(3),所述移动板(3)包括有受力位移机构,移动板(3)的两端安装有受力位移机构,移动板(3)为矩形板状结构,移动板(3)处于侧板(103)之间,移动板(3)的底部与电动缸的顶端连接。
2.如权利要求1所述一种数控加工中心夹具,其特征在于,所述主体(1)包括:
导槽(101),导槽(101)为矩形结构;导向孔(102),导向孔(102)为圆柱形结构,导向孔(102)共设有四个,四个导向孔(102)设在主体(1)的顶端。
3.如权利要求1所述一种数控加工中心夹具,其特征在于,所述主体(1)还包括:
侧板(103),侧板(103)为矩形板状结构,侧板(103)的顶端为楔形结构,侧板(103)固定在主体(1)的顶端两侧;控制槽(104),控制槽(104)为T形结构。
4.如权利要求1所述一种数控加工中心夹具,其特征在于,所述主体(1)还包括:
翻转臂(105),翻转臂(105)为L形结构,翻转臂(105)的底部与拉杆的外端连接;插槽(106),插槽(106)为T形结构;挡块(107),挡块(107)为U形结构。
5.如权利要求1所述一种数控加工中心夹具,其特征在于,所述插件(2)包括:
安装槽(201),安装槽(201)为T形结构,安装槽(201)开设在插件(2)的顶端;卡块(202),卡块(202)为T形结构。
6.如权利要求1所述一种数控加工中心夹具,其特征在于,所述插件(2)还包括:
支撑板(203),支撑板(203)为U形结构,支撑板(203)固定在插件(2)的顶端两侧;安装杆(204),安装杆(204)为圆柱形结构,安装杆(204)设在支撑板(203)的底部。
7.如权利要求1所述一种数控加工中心夹具,其特征在于,所述插件(2)还包括:
接触件(205),接触件(205)为圆柱形管状结构,接触件(205)为橡胶材质;
辅助板(206),辅助板(206)为弧形板状结构。
8.如权利要求1所述一种数控加工中心夹具,其特征在于,所述移动板(3)包括:
移动槽(301),移动槽(301)为T形结构,移动槽(301)开设在移动板(3)的两端;受力板(302),受力板(302)为矩形板状结构,受力板(302)的左侧设有中间凸起圆柱形结构的圆杆,圆杆的外侧套装有弹簧,受力板(302)设在移动板(3)的底部中间位置以及底部右侧。
9.如权利要求1所述一种数控加工中心夹具,其特征在于,所述移动板(3)还包括:
导向杆(303),导向杆(303)为中间凸起的圆柱形结构,导向杆(303)的外侧套装有弹簧,导向杆(303)共设有四个,四个导向杆(303)固定在移动板(3)的底部,四个导向杆(303)插入在四个导向孔(102)内部;
控制板(304),控制板(304)为板状结构,控制板(304)共设有四个,控制板(304)固定在移动板(3)的底部两侧,控制板(304)的外侧设有T形块,T形块插入在控制槽(104)的内部。
10.如权利要求1所述一种数控加工中心夹具,其特征在于,所述移动位移机构包括:
底板(305),底板(305)为T形板状结构,底板(305)嵌入在移动槽(301)的底部;顶板(306),顶板(306)为矩形板状结构,顶板(306)为橡胶材质,顶板(306)固定在底板(305)的顶端,顶板(306)嵌入在移动槽(301)的内部顶端;插板(307),插板(307)为T形板状结构,插板(307)的内部设有圆孔,圆孔内部插入到导向杆(303),插板(307)的底部为楔形结构。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110996743.9A CN113649835B (zh) | 2021-08-27 | 2021-08-27 | 一种数控加工中心夹具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110996743.9A CN113649835B (zh) | 2021-08-27 | 2021-08-27 | 一种数控加工中心夹具 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113649835A true CN113649835A (zh) | 2021-11-16 |
| CN113649835B CN113649835B (zh) | 2022-11-08 |
Family
ID=78493118
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110996743.9A Active CN113649835B (zh) | 2021-08-27 | 2021-08-27 | 一种数控加工中心夹具 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113649835B (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114165697A (zh) * | 2022-02-10 | 2022-03-11 | 江苏中尚机器人科技有限公司 | 一种电子设备的紧定器 |
| CN114571012A (zh) * | 2022-04-29 | 2022-06-03 | 江苏中动机械科技有限公司 | 一种攻丝机用气动杠杆夹紧结构 |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105364544A (zh) * | 2015-12-07 | 2016-03-02 | 吴中区光福华宇钣金厂 | 一种简便退料打孔装置 |
| KR101675699B1 (ko) * | 2015-11-10 | 2016-11-11 | 김양우 | 가공물 고정용 서포트 장치 |
| CN208555631U (zh) * | 2018-08-02 | 2019-03-01 | 重庆市皓峰模具有限公司 | 一种短轴下料模具 |
| CN109926844A (zh) * | 2017-12-17 | 2019-06-25 | 福建和暄实业有限公司 | 一种用于长工件的车床夹具 |
| CN209477783U (zh) * | 2019-01-19 | 2019-10-11 | 无锡凯文斯通精密机械有限公司 | 一种车床自动拉料装置 |
| CN210817115U (zh) * | 2019-10-28 | 2020-06-23 | 襄阳东昇机械有限公司 | 机械式模内送料机构 |
| CN111716267A (zh) * | 2020-07-03 | 2020-09-29 | 段福强 | 一种具有同步夹紧结构的机械加工生产用工件夹具 |
| CN211679641U (zh) * | 2020-01-18 | 2020-10-16 | 上海千缘汽车车身模具有限公司 | 一种双层斜楔机构 |
| CN212286825U (zh) * | 2020-05-20 | 2021-01-05 | 深圳市德盛精密机电有限公司 | 一种零点定位夹具 |
| CN213636271U (zh) * | 2020-11-27 | 2021-07-06 | 西安鑫煜现代数控有限公司 | 一种用于天线组装的支撑工装 |
-
2021
- 2021-08-27 CN CN202110996743.9A patent/CN113649835B/zh active Active
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101675699B1 (ko) * | 2015-11-10 | 2016-11-11 | 김양우 | 가공물 고정용 서포트 장치 |
| CN105364544A (zh) * | 2015-12-07 | 2016-03-02 | 吴中区光福华宇钣金厂 | 一种简便退料打孔装置 |
| CN109926844A (zh) * | 2017-12-17 | 2019-06-25 | 福建和暄实业有限公司 | 一种用于长工件的车床夹具 |
| CN208555631U (zh) * | 2018-08-02 | 2019-03-01 | 重庆市皓峰模具有限公司 | 一种短轴下料模具 |
| CN209477783U (zh) * | 2019-01-19 | 2019-10-11 | 无锡凯文斯通精密机械有限公司 | 一种车床自动拉料装置 |
| CN210817115U (zh) * | 2019-10-28 | 2020-06-23 | 襄阳东昇机械有限公司 | 机械式模内送料机构 |
| CN211679641U (zh) * | 2020-01-18 | 2020-10-16 | 上海千缘汽车车身模具有限公司 | 一种双层斜楔机构 |
| CN212286825U (zh) * | 2020-05-20 | 2021-01-05 | 深圳市德盛精密机电有限公司 | 一种零点定位夹具 |
| CN111716267A (zh) * | 2020-07-03 | 2020-09-29 | 段福强 | 一种具有同步夹紧结构的机械加工生产用工件夹具 |
| CN213636271U (zh) * | 2020-11-27 | 2021-07-06 | 西安鑫煜现代数控有限公司 | 一种用于天线组装的支撑工装 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114165697A (zh) * | 2022-02-10 | 2022-03-11 | 江苏中尚机器人科技有限公司 | 一种电子设备的紧定器 |
| CN114571012A (zh) * | 2022-04-29 | 2022-06-03 | 江苏中动机械科技有限公司 | 一种攻丝机用气动杠杆夹紧结构 |
| CN114571012B (zh) * | 2022-04-29 | 2022-07-15 | 江苏中动机械科技有限公司 | 一种攻丝机用气动杠杆夹紧结构 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113649835B (zh) | 2022-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113649835B (zh) | 一种数控加工中心夹具 | |
| US4291867A (en) | Automatic insertion universal work holding system | |
| CN216780916U (zh) | 一种抓具及内存条装配线 | |
| CN211029723U (zh) | 一种五金加工用新型具有防夹伤功能的夹具 | |
| CN115837682B (zh) | 抓手装置及抓手系统 | |
| CN106181004B (zh) | 焊接设备以及焊接汽车零件的方法 | |
| JPH11326646A (ja) | ファイバホルダ用治具 | |
| CN213614999U (zh) | 电池定位夹具 | |
| CN115026326A (zh) | 一种数控机床用有防夹伤功能的刀架结构 | |
| CN216016669U (zh) | 插磁钢装置 | |
| CN109079388A (zh) | 焊接用固定设备和焊接方法 | |
| CN113732690A (zh) | 一种磁钢片上料机构 | |
| CN214068550U (zh) | 平板变压器的组装夹具及平板变压器自动组装生产线 | |
| CN219443975U (zh) | 电芯极耳焊接治具 | |
| CN213615162U (zh) | 一种柱形零配件的安装工具 | |
| CN220259284U (zh) | 一种钢管冲孔用工装装置 | |
| CN220762321U (zh) | 一种机械设备维修用夹持装置 | |
| CN212642406U (zh) | 一种用于安装汽车拉手的轴销的轴销安装装置 | |
| CN218397002U (zh) | 中心自锁式夹具 | |
| CN219152254U (zh) | 一种快换刀库装置 | |
| CN216029097U (zh) | 辅助装配设备 | |
| CN218612685U (zh) | 电极组装设备 | |
| CN218856064U (zh) | 应用于钉柱安装的定位结构和通用型钉柱自动安装装置 | |
| CN220218223U (zh) | 装配装置 | |
| CN215701512U (zh) | 手机摄像头挡焊圈组装微动辅助平台 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |