CN113406967A - 一种多航天器分布式协同编队控制方法 - Google Patents
一种多航天器分布式协同编队控制方法 Download PDFInfo
- Publication number
- CN113406967A CN113406967A CN202110673566.0A CN202110673566A CN113406967A CN 113406967 A CN113406967 A CN 113406967A CN 202110673566 A CN202110673566 A CN 202110673566A CN 113406967 A CN113406967 A CN 113406967A
- Authority
- CN
- China
- Prior art keywords
- spacecraft
- formation
- ith
- potential function
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000015572 biosynthetic process Effects 0.000 title claims abstract description 149
- 238000000034 method Methods 0.000 title claims abstract description 24
- 238000012423 maintenance Methods 0.000 claims abstract description 32
- 230000004888 barrier function Effects 0.000 claims description 20
- 238000004891 communication Methods 0.000 claims description 20
- 239000013598 vector Substances 0.000 claims description 14
- 239000000126 substance Substances 0.000 claims description 11
- 238000010276 construction Methods 0.000 claims description 7
- 239000011159 matrix material Substances 0.000 claims description 6
- 230000003044 adaptive effect Effects 0.000 claims description 5
- 230000001133 acceleration Effects 0.000 claims description 4
- 230000007717 exclusion Effects 0.000 claims description 4
- 230000002265 prevention Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000006698 induction Effects 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000007123 defense Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/10—Simultaneous control of position or course in three dimensions
- G05D1/101—Simultaneous control of position or course in three dimensions specially adapted for aircraft
- G05D1/104—Simultaneous control of position or course in three dimensions specially adapted for aircraft involving a plurality of aircrafts, e.g. formation flying
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
本发明提供了一种多航天器分布式协同编队控制方法,该方法包括建立坐标系;建立多运动动力学方程;定义任务目标,第一任务目标包括队形构造及保持任务目标,第二任务目标包括队形构造、队形保持以及弹道跟踪目标;设计第一势函数和第二势函数,第一势函数包括避免航天器间相互碰撞和保持拓扑连通性的势函数,第二势函数包括避障碍势函数;设计第一制导律,第一制导律包括多航天器队形构造与保持制导律;设计第二制导律,第二制导律包括多航天器弹道跟踪制导律;根据第一制导律和/或第二制导律完成多航天器分布式协同编队控制。应用本发明的技术方案,以解决现有技术中缺乏能够同时实现避撞、避障和拓扑连通性保持的多航天器编队跟踪控制方案。
Description
技术领域
本发明涉及飞行器控制领域,具体而言,涉及多航天器分布式协同编队控制方法。
背景技术
在实际飞行过程中,通讯拓扑的连通性保持非常关键,尤其对于计算和通信能力有限的小型航天器编队来说影响更为突出。避撞机动会增大航天器之间的相对距离,增加与团队中相邻航天器失去通讯的概率。虽然在已有文献提出了多航天器编队控制律,可以实现编队配置和避障,但没有实现分布式架构并解决连通性保持的问题。现有技术尚未有能够同时实现避碰、避障和保持连通性的多航天器编队跟踪控制方案,难以满足编队飞行的安全性的需求。
发明内容
本发明的主要目的在于提供一种多航天器分布式协同编队控制方法,以至少解决上述问题。
本发明提供了一种多航天器分布式协同编队控制方法,包括以下步骤:定义地心惯性坐标系,以地心惯性坐标系为基准建立当地垂直当地水平坐标系即LVLH(local-vertical/local-horizontal)坐标系;根据LVLH坐标系建立多航天器运动动力学方程,多航天器运动动力学方程包括至少两个航天器;根据LVLH坐标系和多航天器运动动力学方程定义任务目标,任务目标包括第一任务目标和第二任务目标,第一任务目标包括队形构造及保持任务目标,第二任务目标包括队形构造、队形保持以及弹道跟踪目标;设计第一势函数和第二势函数,第一势函数包括避免航天器间相互碰撞和保持拓扑连通性的势函数,第二势函数包括避障碍势函数;根据第一任务目标、第一势函数和第二势函数设计第一制导律,第一制导律包括多航天器队形构造与保持制导律;根据第二任务目标、第一势函数和第二势函数设计第二制导律,第二制导律包括多航天器弹道跟踪制导律;根据第一制导律和/或第二制导律完成多航天器分布式协同编队控制。
进一步地,多航天器队形构造与保持制导律包括避撞和拓扑连通性保持项、避障项、队形构造与保持项和编队行进速度项。
进一步地,多航天器弹道跟踪制导律包括避撞和拓扑连通性保持项、避障项、队形构造与保持项和弹道跟踪项。
进一步地,多航天器队形构造与保持制导律

其中, 为避撞和拓扑连通性保持项,
为避撞和拓扑连通性保持项, 为避障项,
为避障项, 为队形构造与保持项,-(vi-vd)为编队行进速度项,
为队形构造与保持项,-(vi-vd)为编队行进速度项, 为多航天器队形构造与保持制导律,i=1,2,…,n,j=1,2,…,n,n为多航天器编队中的航天器总数,pi为第i个航天器在LVLH坐标系中的位置,
为多航天器队形构造与保持制导律,i=1,2,…,n,j=1,2,…,n,n为多航天器编队中的航天器总数,pi为第i个航天器在LVLH坐标系中的位置, 为避免航天器间相互碰撞和保持拓扑连通性的势函数,||pij||为第i个航天器和第j个航天器之间的相对距离,k=1,2,…,m,m为障碍物数量,
为避免航天器间相互碰撞和保持拓扑连通性的势函数,||pij||为第i个航天器和第j个航天器之间的相对距离,k=1,2,…,m,m为障碍物数量, 为第k个障碍物在第i个航天器的排斥区的集合,δik为用于保证多航天器编队系统稳定性的自适应矩阵,
为第k个障碍物在第i个航天器的排斥区的集合,δik为用于保证多航天器编队系统稳定性的自适应矩阵, 为第i个航天器和第k个障碍物间的避障碍势函数,ok(k∈[1,2,…,m])为第k个障碍物的位置,Ni为第i个航天器的邻接航天器集合,pij为第i个航天器和第j个航天器的当前相对位置矢量,
为第i个航天器和第k个障碍物间的避障碍势函数,ok(k∈[1,2,…,m])为第k个障碍物的位置,Ni为第i个航天器的邻接航天器集合,pij为第i个航天器和第j个航天器的当前相对位置矢量, 为第i个航天器在LVLH坐标系中的期望位置,vi为第i个航天器的当前速度,vj为第j个航天器的当前速度,vd为期望的多航天器编队行进速度。
为第i个航天器在LVLH坐标系中的期望位置,vi为第i个航天器的当前速度,vj为第j个航天器的当前速度,vd为期望的多航天器编队行进速度。
进一步地,多航天器分布式协同编队控制方法,其特征在于,所述多航天器弹道跟踪制导律
其中, 为避撞和通讯拓扑连通性保持项,
为避撞和通讯拓扑连通性保持项, 为避障项,
为避障项, 为队形构造与保持项,
为队形构造与保持项, 为弹道跟踪项,vt为参考弹道的速度,
为弹道跟踪项,vt为参考弹道的速度, 为参考弹道的加速度,pit为第i个航天器和目标的当前相对位置矢量,
为参考弹道的加速度,pit为第i个航天器和目标的当前相对位置矢量, 为第i个航天器和目标期望相对位置矢量。
为第i个航天器和目标期望相对位置矢量。
进一步地,避免航天器间相互碰撞和保持拓扑连通性的势函数

其中, 为第i个航天器和第j个航天器间的最小容许相对距离,
为第i个航天器和第j个航天器间的最小容许相对距离, 为第i个航天器和第j个航天器间的最大通讯距离,
为第i个航天器和第j个航天器间的最大通讯距离, 为第i个航天器在LVLH坐标系中的期望位置,
为第i个航天器在LVLH坐标系中的期望位置, 为第j个航天器在LVLH坐标系中的期望位置。
为第j个航天器在LVLH坐标系中的期望位置。
进一步地,避障碍势函数
其中, 为第i个航天器和第k个障碍物间的最小容许相对距离,
为第i个航天器和第k个障碍物间的最小容许相对距离, 为第i个航天器和第k个障碍物间可产生相互排斥力的最大距离。
为第i个航天器和第k个障碍物间可产生相互排斥力的最大距离。
进一步地,队形构造及保持任务目标包括
进一步地,队形构造、队形保持以及弹道跟踪目标包括 其中pit为第i个航天器和目标的当前相对位置矢量,
其中pit为第i个航天器和目标的当前相对位置矢量, 为第i个航天器和目标期望相对位置矢量,vt为目标速度。
为第i个航天器和目标期望相对位置矢量,vt为目标速度。
进一步地,用于保证多航天器编队系统稳定性的自适应矩阵

其中,γi为一个正常数, 为
为 的伪逆。
的伪逆。
本发明的优点及有益效果在于:应用本发明的技术方案,设计提出了具有避碰、避障和保持连通性的多航天器编队跟踪控制方案,显著提高编队飞行的安全性,本发明提出的控制律基于部分连通拓扑的分布式控制律,所提出的方案是分布式的,而不是全连通图,每个航天器只需要与其相邻航天器进行通信,能够减轻通信负担。本发明首先设计了一系列新的人工势函数,以满足保持邻接航天器的连通性,同时避免航天器间的相互碰撞以及躲避障碍物等编队飞行安全性要求。结合一致性概念,设计了多航天器编队构造与保持的分布式控制律,保持交互拓扑的连通性,然后将所提出的编队控制律扩展到弹道跟踪中,同时满足安全性要求。
附图说明
图1为根据本发明的具体实施例提供的多航天器分布式协同编队控制方法流程图。
图2为根据本发明的具体实施例提供的地心惯性坐标系和LVLH坐标系示意图。
图3为根据本发明的具体实施例提供的碰撞区、排斥区和感应区示意图。
图4为根据本发明的具体实施例提供的避免航天器间相互碰撞和保持拓扑连通性的势函数幅值与航天器间相对距离的关系。
图5为根据本发明的具体实施例提供的航天器周围的用于避免航天器间相互碰撞和保持拓扑连通性的二维势场。
图6为根据本发明的具体实施例提供的避障势函数幅值与航天器和障碍物间相对距离的关系。
图7为根据本发明的具体实施例提供的航天器周围的用于避障的二维势场。
具体实施方式
下面对本发明提出的一种多航天器分布式协同编队控制方法做进一步描述如下:
步骤1,定义地心惯性坐标系,以地心惯性坐标系为基准建立LVLH坐标系。
在完成步骤1构造状态空间后,为了实现对航天器运动得描述,进入步骤2,根据LVLH坐标系建立多航天器运动动力学方程,多航天器运动动力学方程包括至少两个航天器。
在完成步骤2建立多航天器运动动力学方程后,为了实现队形构造、队形保持以及弹道跟踪,进入步骤3,根据LVLH坐标系和多航天器运动动力学方程定义任务目标,任务目标包括第一任务目标和第二任务目标,第一任务目标包括队形构造及保持任务目标,第二任务目标包括队形构造、队形保持以及弹道跟踪目标。
在完成步骤3定义任务目标后,为了避免航天器间相互碰撞和保持拓扑连通性以及避障碍,进入步骤4,设计第一势函数和第二势函数,第一势函数包括避免航天器间相互碰撞和保持拓扑连通性的势函数,第二势函数包括避障碍势函数。
在完成步骤4设计势函数后,为了实现多航天器队形构造与保持,进入步骤5,根据第一任务目标、第一势函数和第二势函数设计第一制导律,第一制导律包括多航天器队形构造与保持制导律。
在完成步骤5设计多航天器队形构造与保持制导律后,为了实现多航天器弹道跟踪,进入步骤6,根据第二任务目标、第一势函数和第二势函数设计第二制导律,第二制导律包括多航天器弹道跟踪制导律;根据第一制导律和/或第二制导律完成多航天器分布式协同编队控制。根据所述多航天器队形构造与保持制导律和/或多航天器弹道跟踪制导律完成多航天器分布式协同编队控制。
为了对本发明有进一步地了解,下面结合图1至图7对本发明的多航天器分布式协同编队控制方法进行详细说明。
步骤1,定义地心惯性坐标系,以地心惯性坐标系为基准建立LVLH坐标系,具体包括:
定义地心惯性坐标系,如图1和图2所示,在地心惯性坐标系SI(OIxIyIzI)中,原点取为地心OI,其xI轴指向本初子午线与赤道的交点,zI轴指向北极,yI轴由右手定则确定。在LVLH(local-vertical/local-horizontal)坐标系SR(ORxRyRzR)中,原点取为轨道上某一参考点OR,xR轴从地心指向参考点,zR平行于轨道角动量矢量即指向轨道法方向,yR轴由右手定则确定。LVLH坐标系中沿xR、yR和zR轴的三个分量分别指向径向(radial)、切向追踪(along-track)和横向追踪(cross-track)三个方向,LVLH坐标系跟踪的是当地水平面(local horizontal plane),由yR和zR轴确定和当地垂直面(local vertical plane,平行于xR轴)。
以地心惯性坐标系为基准建立LVLH坐标系,由地心惯性坐标系{SI}转换到LVLH坐标系{SR}的转换矩阵定义为LRI,

其中,uR为升交角距(近地点幅角ωR和真近点角θR的和,即uR=ωR+θR),iR为轨道倾角,ΩR为参考点的升交点赤经。
步骤2,根据LVLH坐标系建立多航天器运动动力学方程,多航天器运动动力学方程包括至少两个航天器,具体包括:
如图2所示,多航天器正在跟踪目标弹道。为了描述多航天器编队相对动力学关系,定义不受外界干扰的椭圆参考轨道以及参考点,参考点的运动可描述为 其中rR参考点与地心间的距离,aR为参考轨道的半长轴,eR为椭圆轨道偏心率。真近点角θR的变化率
其中rR参考点与地心间的距离,aR为参考轨道的半长轴,eR为椭圆轨道偏心率。真近点角θR的变化率 其中
其中 为θR的一阶导数,
为θR的一阶导数, 为θR的二阶导数,μe=3.98574405096×1014m3/s2为地球的引力常数,m为米,s为秒,BR为参考轨道的升交点,DR为参考轨道的降交点。
为θR的二阶导数,μe=3.98574405096×1014m3/s2为地球的引力常数,m为米,s为秒,BR为参考轨道的升交点,DR为参考轨道的降交点。
定义第i个航天器在LVLH坐标系中的位置 其中
其中 为第i个航天器的在LVLH坐标系x方向上的位置,
为第i个航天器的在LVLH坐标系x方向上的位置, 为第i个航天器的在LVLH坐标系y方向上的位置,
为第i个航天器的在LVLH坐标系y方向上的位置, 为第i个航天器的在LVLH坐标系z方向上的位置。
为第i个航天器的在LVLH坐标系z方向上的位置。
第i个航天器的在LVLH坐标系{SL}中的动力学方程可表述为 其中,
其中, 为pi的二阶导数,
为pi的二阶导数,
 为pi的一阶导数,
为pi的一阶导数, 为等效制导律,fi为动力学模型中的非线性项,其上界为
为等效制导律,fi为动力学模型中的非线性项,其上界为 ui为第i个航天器相对于地心惯性坐标系的指令加速度。
ui为第i个航天器相对于地心惯性坐标系的指令加速度。





其中J2=0.0010826267,RE=6378.137km,其中 为第i个航天器的在地心惯性坐标系x方向上的位置,
为第i个航天器的在地心惯性坐标系x方向上的位置, 为第i个航天器的在地心惯性坐标系y方向上的位置,
为第i个航天器的在地心惯性坐标系y方向上的位置, 为第i个航天器的在地心惯性坐标系z方向上的位置。因此,J2摄动力在LVLH坐标系中的表达为
为第i个航天器的在地心惯性坐标系z方向上的位置。因此,J2摄动力在LVLH坐标系中的表达为
步骤3,根据LVLH坐标系和多航天器运动动力学方程定义任务目标,任务目标包括第一任务目标和第二任务目标,第一任务目标包括队形构造及保持任务目标,第二任务目标包括队形构造、队形保持以及弹道跟踪目标。
多航天器编队中的航天器需要构造和保持预设的编队队形,并保持期望的编队行进速度。同时,航天器还需要实现对敌方障碍物的突防以及避免与空间碎片的碰撞,并保持通讯拓扑的连通性,即邻接航天器的相对距离不超过最大通讯距离。此外,多航天器还需要实现机动弹道的弹道跟踪。
初始时刻,多航天器编队中的航天器处于不同的位置,每个航天器的速度(包括大小和方向)都不同。当多航天器到达所期望的编队队形时,航天器的相对位置将满足要求,航天器之间的相对速度将保持在零。另外,对于编队保持任务,整个多航天器编队需要以一定的行进速度飞行。定义pij=pi-pj为第i个航天器和第j个航天器的当前相对位置矢量,pi为第i个航天器在LVLH坐标系中的位置,pj为第j个航天器在LVLH坐标系中的位置, 为第i个航天器在LVLH坐标系中的期望位置,
为第i个航天器在LVLH坐标系中的期望位置, 可根据编队队形获得。第i个航天器的当前速度为vi,期望的多航天器编队行进速度为vd。那么,当相对位置误差和速度误差为零时,定义多航天器实现了队形构造及保持的任务目标,即
可根据编队队形获得。第i个航天器的当前速度为vi,期望的多航天器编队行进速度为vd。那么,当相对位置误差和速度误差为零时,定义多航天器实现了队形构造及保持的任务目标,即
弹道跟踪任务中,若多航天器编队可实现队形构造、队形保持以及弹道跟踪,那么下述条件同样需要被满足,即 其中pit为第i个航天器和目标的当前相对位置矢量,
其中pit为第i个航天器和目标的当前相对位置矢量, 为第i个航天器和目标期望相对位置矢量,vt为目标速度。
为第i个航天器和目标期望相对位置矢量,vt为目标速度。
步骤4,设计第一势函数和第二势函数,第一势函数包括避免航天器间相互碰撞和保持拓扑连通性的势函数,第二势函数包括避障碍势函数。
如图3所示,为实现航天器间避撞、避障以及保持通信拓扑连通性的目标,我们设定航天器周围存在一个碰撞区、一个排斥区和一个感应区,半径分别为rCol、rRep和rSen。定义当两个对象(两个航天器或航天器与障碍物等)的相对距离小于rCol时,那么这两个对象发生了碰撞。若某航天器与障碍物间的相对距离小于等于rRep,航天器将产生排斥力来绕开障碍物实现突防,避免被拦截。为保证两枚航天器之间的通讯,两枚航天器之间的相对距离需要保持小于或等于rSen。本文中,为保证多航天器的编队飞行更加安全,我们考虑每枚航天器为一个圆球,所以rCol的取值要大于两个球半径的和。另外,假设 即碰撞区的半径要小于最小期望相对距离。
即碰撞区的半径要小于最小期望相对距离。
考虑每个航天器是一个具有一定半径的圆球,那么避免航天器间相互碰撞和保持拓扑连通性的势函数 设计为
设计为

其中||pij||=||pi-pj||为第i个航天器和第j个航天器之间的相对距离, 为两个航天器间的期望相对距离,
为两个航天器间的期望相对距离, 为第i个航天器在LVLH坐标系中的期望位置,
为第i个航天器在LVLH坐标系中的期望位置, 为第j个航天器在LVLH坐标系中的期望位置,
为第j个航天器在LVLH坐标系中的期望位置, 为第i个航天器和第j个航天器间的最小容许相对距离,
为第i个航天器和第j个航天器间的最小容许相对距离, 为第i个航天器和第j个航天器间的最大通讯距离。
为第i个航天器和第j个航天器间的最大通讯距离。
如图4所示,当且仅当第i个航天器和第j个航天器之间的相对距离为期望相对距离 时,非负势函数
时,非负势函数 变为零。当相对距离远离
变为零。当相对距离远离 时,
时, 的幅值将急剧变大,甚至变为无穷大。
的幅值将急剧变大,甚至变为无穷大。 的二维势场如图5所示。
的二维势场如图5所示。
假设空间中存在m个敌方的障碍物处于第i个航天器的排斥区内,那么第i个航天器和第k个障碍物间的避障碍势函数 设计为
设计为
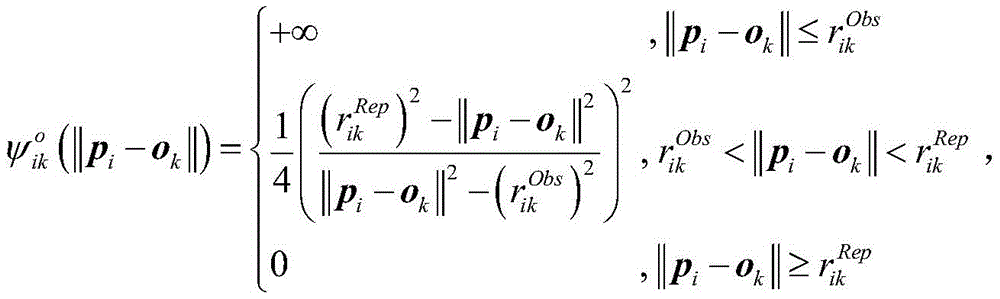





如图6所示,当 时,势函数幅值将变为无穷,
时,势函数幅值将变为无穷, 的二维势场如图7所示。此外,若第k个障碍物在第i个航天器的排斥区,定义
的二维势场如图7所示。此外,若第k个障碍物在第i个航天器的排斥区,定义 为第k个障碍物在第i个航天器的排斥区的集合。
为第k个障碍物在第i个航天器的排斥区的集合。
步骤5,根据第一任务目标、第一势函数和第二势函数设计多航天器队形构造与保持制导律。
多航天器队形构造与保持的等效分布式制导律

其中, 为避撞和拓扑连通性保持项,
为避撞和拓扑连通性保持项, 为避障项,
为避障项, 为队形构造与保持项,-(vi-vd)为编队行进速度项,δik是一个用于保证多航天器编队系统稳定性的自适应矩阵,表达式为
为队形构造与保持项,-(vi-vd)为编队行进速度项,δik是一个用于保证多航天器编队系统稳定性的自适应矩阵,表达式为

其中第j个航天器的当前速度为vj,γi为一个正常数, 为
为 的伪逆,
的伪逆,
本发明的多航天器队形构造与保持制导律,在第一定理的前提条件下,能够满足相对位置一致性、避免航天器间碰撞,避障与通讯拓扑连通性保持和编队行进速度一致性。
第一定理定义为假设初始相对距离和相对速度误差有界,即:

其中δv1和δv2为有界正常数。pi(0)为第i个航天器在LVLH坐标系中的初始位置,pj(0)第j个航天器在LVLH坐标系中的初始位置,ok(0)为第k个障碍物的初始位置,第i个航天器的初始速度为vi(0),第j个航天器的初始速度为vj(0), 为第i个航天器的速度误差初始值,
为第i个航天器的速度误差初始值,
利用上述多航天器队形构造与保持分布式制导律可实现如下多航天器编队控制目标,即:
1)相对位置一致性:
对于 以及
以及

意味着多航天器队伍中的航天器达到了期望的相对位置,也就是实现了期望队形的构造。
2)避免航天器间碰撞,避障与通讯拓扑连通性保持:
对于 以及
以及

意味着在编队过程中,第i个航天器不会与队伍中的其他航天器发生碰撞,也可以突防敌方障碍物的拦截。同时,通讯拓扑的连通性得以保持。
3)编队行进速度一致性:
对于

意味着多航天器队伍某两个航天器的相对速度误差将会变为零,同时多航天器编队的飞行速度将会收敛到期望的行进速度vd。
步骤6,根据第二任务目标、第一势函数和第二势函数设计多航天器弹道跟踪制导律。
航天器弹道跟踪制导律 其中,
其中, 为避撞和通讯拓扑连通性保持项,
为避撞和通讯拓扑连通性保持项, 为避障项,
为避障项, 为队形构造与保持项,
为队形构造与保持项, 为弹道跟踪项,vt和
为弹道跟踪项,vt和 代表参考弹道的速度和加速度。变量δik为用于保证多航天器系统编队稳定性的自适应矩阵,设计为
代表参考弹道的速度和加速度。变量δik为用于保证多航天器系统编队稳定性的自适应矩阵,设计为

其中γi为正常数, 为
为 的伪逆。
的伪逆。
本发明的航天器弹道跟踪制导律在第二定理前提下,能够满足相对位置一致性、避免航天器间碰撞,避障及通信拓扑连通性保持和相对速度一致性
给定多航天器空间飞行动力学模型,以及所设计的等效编队控制律,第二定理定义为初始相对位置和速度误差有界,即:

其中δv1和δv2为有界正常数。
那么,利用控制律可实现如下多航天器编队控制目标,多航天器编队控制目标包括相对位置一致性、避免航天器间碰撞,避障及通信拓扑连通性保持和相对速度一致性
相对位置一致性:
对于 以及
以及

意味着多航天器队伍中的航天器到达了期望的位置,即构造完成了期望队形,并实现了对参考弹道的跟踪。
避免航天器间碰撞,避障及通信拓扑连通性保持:
对于 以及
以及

意味着在编队过程中,第i个航天器不会与队伍中的其他航天器发生碰撞,也可以突防敌方障碍物的拦截。同时,通讯拓扑的连通性得以保持。
相对速度一致性:
对于

意味着多航天器队伍中的航天器相对速度为零,编队行进速度与参考弹道速度保持一致。
综上所述,本发明的多航天器分布式协同编队控制方法提出了具有避碰、避障和保持连通性的多航天器编队跟踪控制方案,显著提高编队飞行的安全性,本发明提出的控制律基于部分连通拓扑的分布式控制律,所提出的方案是分布式的,而不是全连通图,每个航天器只需要与其相邻航天器进行通信,能够减轻通信负担。本发明设计了一系列新的人工势函数,以满足保持邻接航天器的连通性,同时避免航天器间的相互碰撞以及躲避障碍物等编队飞行安全性要求。结合一致性概念,设计了多航天器编队构造与保持的分布式控制律,保持交互拓扑的连通性,然后将所提出的编队控制律扩展到弹道跟踪中,同时满足安全性要求。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
Claims (10)
1.一种多航天器分布式协同编队控制方法,其特征在于,包括以下步骤:定义地心惯性坐标系,以地心惯性坐标系为基准建立当地垂直当地水平坐标系即LVLH坐标系;根据LVLH坐标系建立多航天器运动动力学方程,多航天器运动动力学方程包括至少两个航天器;根据LVLH坐标系和多航天器运动动力学方程定义任务目标,任务目标包括第一任务目标和第二任务目标;第一任务目标包括队形构造及保持任务目标,第二任务目标包括队形构造、队形保持以及弹道跟踪目标;设计第一势函数和第二势函数,第一势函数包括避免航天器间相互碰撞和保持拓扑连通性的势函数,第二势函数包括避障碍势函数;根据第一任务目标、第一势函数和第二势函数设计第一制导律,第一制导律包括多航天器队形构造与保持制导律;根据第二任务目标、第一势函数和第二势函数设计第二制导律,第二制导律包括多航天器弹道跟踪制导律;根据第一制导律和/或第二制导律完成多航天器分布式协同编队控制。
2.根据权利要求1所述的一种多航天器分布式协同编队控制方法,其特征在于:多航天器队形构造与保持制导律包括避撞和拓扑连通性保持项、避障项、队形构造与保持项和编队行进速度项。
3.根据权利要求1所述的一种多航天器分布式协同编队控制方法,其特征在于:多航天器弹道跟踪制导律包括避撞和拓扑连通性保持项、避障项、队形构造与保持项和弹道跟踪项。
4.根据权利要求1或2所述的一种多航天器分布式协同编队控制方法,其特征在于:多航天器队形构造与保持制导律

其中, 为避撞和拓扑连通性保持项,
为避撞和拓扑连通性保持项, 为避障项,
为避障项, 为队形构造与保持项,-(vi-vd)为编队行进速度项,
为队形构造与保持项,-(vi-vd)为编队行进速度项, 为多航天器队形构造与保持制导律,i=1,2,…,n,j=1,2,…,n,n为多航天器编队中的航天器总数,pi为第i个航天器在LVLH坐标系中的位置,
为多航天器队形构造与保持制导律,i=1,2,…,n,j=1,2,…,n,n为多航天器编队中的航天器总数,pi为第i个航天器在LVLH坐标系中的位置, 为避免航天器间相互碰撞和保持拓扑连通性的势函数,||pij||为第i个航天器和第j个航天器之间的相对距离,k=1,2,…,m,m为障碍物数量,
为避免航天器间相互碰撞和保持拓扑连通性的势函数,||pij||为第i个航天器和第j个航天器之间的相对距离,k=1,2,…,m,m为障碍物数量, 为第k个障碍物在第i个航天器的排斥区的集合,δik为用于保证多航天器编队系统稳定性的自适应矩阵,
为第k个障碍物在第i个航天器的排斥区的集合,δik为用于保证多航天器编队系统稳定性的自适应矩阵, 为第i个航天器和第k个障碍物间的避障碍势函数,ok(k∈[1,2,…,m])为第k个障碍物的位置,Ni为第i个航天器的邻接航天器集合,pij为第i个航天器和第j个航天器的当前相对位置矢量,
为第i个航天器和第k个障碍物间的避障碍势函数,ok(k∈[1,2,…,m])为第k个障碍物的位置,Ni为第i个航天器的邻接航天器集合,pij为第i个航天器和第j个航天器的当前相对位置矢量, 为第i个航天器在LVLH坐标系中的期望位置,vi为第i个航天器的当前速度,vj为第j个航天器的当前速度,vd为期望的多航天器编队行进速度。
为第i个航天器在LVLH坐标系中的期望位置,vi为第i个航天器的当前速度,vj为第j个航天器的当前速度,vd为期望的多航天器编队行进速度。
5.根据权利要求1或3所述的一种多航天器分布式协同编队控制方法,其特征在于:所述多航天器弹道跟踪制导律

其中, 为避撞和通讯拓扑连通性保持项,
为避撞和通讯拓扑连通性保持项, 为避障项,
为避障项, 为队形构造与保持项,
为队形构造与保持项, 为弹道跟踪项,vt为参考弹道的速度,
为弹道跟踪项,vt为参考弹道的速度, 为参考弹道的加速度,pit为第i个航天器和目标的当前相对位置矢量,
为参考弹道的加速度,pit为第i个航天器和目标的当前相对位置矢量, 为第i个航天器和目标期望相对位置矢量。
为第i个航天器和目标期望相对位置矢量。
6.根据权利要求1所述的一种多航天器分布式协同编队控制方法,其特征在于:避免航天器间相互碰撞和保持拓扑连通性的势函数

其中, 为为第i个航天器和第j个航天器间的最小容许相对距离,
为为第i个航天器和第j个航天器间的最小容许相对距离, 为第i个航天器和第j个航天器间的最大通讯距离,
为第i个航天器和第j个航天器间的最大通讯距离, 为第i个航天器在LVLH坐标系中的期望位置,
为第i个航天器在LVLH坐标系中的期望位置, 为第j个航天器在LVLH坐标系中的期望位置。
为第j个航天器在LVLH坐标系中的期望位置。
7.根据权利要求1所述的一种多航天器分布式协同编队控制方法,其特征在于:避障碍势函数
其中, 为第i个航天器和第k个障碍物间的最小容许相对距离,
为第i个航天器和第k个障碍物间的最小容许相对距离, 为第i个航天器和第k个障碍物间可产生相互排斥力的最大距离。
为第i个航天器和第k个障碍物间可产生相互排斥力的最大距离。
8.根据权利要求1所述的一种多航天器分布式协同编队控制方法,其特征在于:队形构造及保持任务目标包括
9.根据权利要求1所述的一种多航天器分布式协同编队控制方法,其特征在于:队形构造、队形保持以及弹道跟踪目标包括 其中pit为第i个航天器和目标的当前相对位置矢量,
其中pit为第i个航天器和目标的当前相对位置矢量, 为第i个航天器和目标期望相对位置矢量,vt为目标速度。
为第i个航天器和目标期望相对位置矢量,vt为目标速度。
10.根据权利要求4所述的一种多航天器分布式协同编队控制方法,其特征在于:用于保证多航天器编队系统稳定性的自适应矩阵

其中,γi为一个正常数,
 为
为 的伪逆。
的伪逆。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110673566.0A CN113406967B (zh) | 2021-06-17 | 2021-06-17 | 一种多航天器分布式协同编队控制方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110673566.0A CN113406967B (zh) | 2021-06-17 | 2021-06-17 | 一种多航天器分布式协同编队控制方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113406967A true CN113406967A (zh) | 2021-09-17 |
| CN113406967B CN113406967B (zh) | 2022-07-15 |
Family
ID=77684937
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110673566.0A Active CN113406967B (zh) | 2021-06-17 | 2021-06-17 | 一种多航天器分布式协同编队控制方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113406967B (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113885563A (zh) * | 2021-10-19 | 2022-01-04 | 中国电子科技集团公司第五十四研究所 | 一种航天器编队轨道协同与连通性保持控制方法 |
| CN114111448A (zh) * | 2021-11-25 | 2022-03-01 | 中北大学 | 适用于运动目标多视角探测的空中多智能体椭圆轨道协同环绕跟踪方法 |
| CN116414148A (zh) * | 2023-03-15 | 2023-07-11 | 华中科技大学 | 一种分布式的旋翼无人机协同控制方法、装置和系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106707751A (zh) * | 2016-12-20 | 2017-05-24 | 哈尔滨工业大学 | 航天器终端接近的有限时间饱和避碰控制方法 |
| US20170309192A1 (en) * | 2016-03-08 | 2017-10-26 | Airbus Operations (S.A.S.) | Collision avoidance method and device for an aircraft formation relative to an intrusive aircraft |
| CN109765921A (zh) * | 2019-03-04 | 2019-05-17 | 北京航空航天大学 | 一种保证通信且避免碰撞的航天器编队协同控制方法 |
| CN111367314A (zh) * | 2020-03-09 | 2020-07-03 | 西北工业大学 | 一种基于多航天器编队的空间非合作目标协同抓捕方法 |
| CN111857181A (zh) * | 2020-07-24 | 2020-10-30 | 盐城工学院 | 分布式航天器编队自适应有限时间姿态协同跟踪控制方法 |
-
2021
- 2021-06-17 CN CN202110673566.0A patent/CN113406967B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20170309192A1 (en) * | 2016-03-08 | 2017-10-26 | Airbus Operations (S.A.S.) | Collision avoidance method and device for an aircraft formation relative to an intrusive aircraft |
| CN106707751A (zh) * | 2016-12-20 | 2017-05-24 | 哈尔滨工业大学 | 航天器终端接近的有限时间饱和避碰控制方法 |
| CN109765921A (zh) * | 2019-03-04 | 2019-05-17 | 北京航空航天大学 | 一种保证通信且避免碰撞的航天器编队协同控制方法 |
| CN111367314A (zh) * | 2020-03-09 | 2020-07-03 | 西北工业大学 | 一种基于多航天器编队的空间非合作目标协同抓捕方法 |
| CN111857181A (zh) * | 2020-07-24 | 2020-10-30 | 盐城工学院 | 分布式航天器编队自适应有限时间姿态协同跟踪控制方法 |
Non-Patent Citations (2)
| Title |
|---|
| ZHONGYUAN CHEN ETC.: "Connectivity Preservation and Obstacle Avoidance in Small Multi-Spacecraft Formation with Distributed Adaptive Tracking Control", 《JOURNAL OF INTELLIGENT & ROBOTIC SYSTEMS》 * |
| ZHONGYUAN CHEN ETC.: "Connectivity Preservation and Obstacle Avoidance in Small Multi-Spacecraft Formation with Distributed Adaptive Tracking Control", 《JOURNAL OF INTELLIGENT & ROBOTIC SYSTEMS》, 14 December 2020 (2020-12-14), pages 1 - 23 * |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113885563A (zh) * | 2021-10-19 | 2022-01-04 | 中国电子科技集团公司第五十四研究所 | 一种航天器编队轨道协同与连通性保持控制方法 |
| CN114111448A (zh) * | 2021-11-25 | 2022-03-01 | 中北大学 | 适用于运动目标多视角探测的空中多智能体椭圆轨道协同环绕跟踪方法 |
| CN114111448B (zh) * | 2021-11-25 | 2023-03-03 | 中北大学 | 适用于运动目标多视角探测的空中多智能体椭圆轨道协同环绕跟踪方法 |
| CN116414148A (zh) * | 2023-03-15 | 2023-07-11 | 华中科技大学 | 一种分布式的旋翼无人机协同控制方法、装置和系统 |
| CN116414148B (zh) * | 2023-03-15 | 2023-12-05 | 华中科技大学 | 一种分布式的旋翼无人机协同控制方法、装置和系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113406967B (zh) | 2022-07-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113406967B (zh) | 一种多航天器分布式协同编队控制方法 | |
| CN105549606B (zh) | 针对失效卫星的超近距离最优防撞接近方法 | |
| CN106707751B (zh) | 航天器终端接近的有限时间饱和避碰控制方法 | |
| CN109375648B (zh) | 一种多约束条件下椭圆轨道卫星编队构形初始化方法 | |
| CN111367314B (zh) | 一种基于多航天器编队的空间非合作目标协同抓捕方法 | |
| CN110340888A (zh) | 一种空间机器人抓捕控制系统、强化学习方法及动力学建模方法 | |
| CN105353763B (zh) | 一种非合作目标航天器相对轨道姿态有限时间控制方法 | |
| CN104309822B (zh) | 一种基于参数优化的航天器单脉冲水滴形绕飞轨迹悬停控制方法 | |
| CN110466808B (zh) | 基于多等碰撞概率线法的凸多边形航天器安全控制方法 | |
| CN106055810A (zh) | 用于在轨快速抓捕的姿轨臂一体化运动规划方法 | |
| CN105912819A (zh) | 一种地月l1拉格朗日点转移轨道的快速设计方法 | |
| Zappulla et al. | Experiments on autonomous spacecraft rendezvous and docking using an adaptive artificial potential field approach | |
| CN109459041A (zh) | 一种微纳星群变迁规划与控制方法 | |
| CN111924139A (zh) | 基于膨胀预警区的小天体着陆避障常推力控制方法 | |
| Liu et al. | A collision control strategy for detumbling a non-cooperative spacecraft by a robotic arm | |
| Ashkoofaraz et al. | Aerial load transportation with obstacle avoidance in observed environment | |
| CN108303874A (zh) | 一种针对绳系空间拖船系统摆振的小推力切换控制方法 | |
| Vendrichoski et al. | Mathematical modeling and control of a quadrotor aerial vehicle with tiltrotors aimed for interaction tasks | |
| Seubert et al. | Tethered coulomb structures: Prospects and challenges | |
| CN113741197B (zh) | 高轨目标的单次抵近三脉冲控制方法及系统 | |
| Liang et al. | Guidance for precision landing on asteroid using active hopping trajectory | |
| CN111596678B (zh) | 一种航天器逼近空间翻滚目标的相对位置自适应控制方法 | |
| Sun et al. | Optimal spacecraft rendezvous using the combination of aerodynamic force and Lorentz force | |
| Ortega | Fuzzy logic techniques for rendezvous and docking of two geostationary satellites | |
| Liu et al. | Dynamics of the space tug system with a short tether |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |