CN113275775A - 激光切割器用操作台及激光切割机器人 - Google Patents
激光切割器用操作台及激光切割机器人 Download PDFInfo
- Publication number
- CN113275775A CN113275775A CN202110825944.2A CN202110825944A CN113275775A CN 113275775 A CN113275775 A CN 113275775A CN 202110825944 A CN202110825944 A CN 202110825944A CN 113275775 A CN113275775 A CN 113275775A
- Authority
- CN
- China
- Prior art keywords
- plate
- fixedly connected
- transmission
- supporting
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/70—Auxiliary operations or equipment
- B23K26/702—Auxiliary equipment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/36—Removing material
- B23K26/38—Removing material by boring or cutting
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Plasma & Fusion (AREA)
- Mechanical Engineering (AREA)
- Laser Beam Processing (AREA)
Abstract
本发明公开了激光切割器用操作台及激光切割机器人,属于激光切割领域。激光切割器用操作台,包括底座,还包括:支撑座,通过第一传动部件与所述底座滑动连接;传动柱,通过第二传动部件与所述支撑座转动连接;驱动部件,设置在所述支撑座上;第二托板,设置在所述传动柱上;限位板,固定连接在所述第二托板的上表面;从动板,滑动连接在所述限位板内;电磁铁,固定连接在所述从动板上;本发明中通过电磁铁对板材进行上下料,使得板材的更换方便,避免了需要人工频繁的对板材进行更换固定,提高了切割效率。
Description
技术领域
本发明涉及激光切割技术领域,尤其涉及激光切割器用操作台及激光切割机器人。
背景技术
激光切割机器人是将从激光器发射出的激光,经光路系统,聚焦成高功率密度的激光束;激光束照射到工件表面,使工件达到熔点或沸点,同时与光束同轴的高压气体将熔化或气化金属吹走,激光切割机加工方法具有精度高、加工成本低等特点,与传统的氧乙炔、等离子等切割工艺相比,激光切割速度快、切缝窄、热影响区小、切缝边缘垂直度好、切边光滑,而当下的激光切割机器人更是可以对工件进行三维切割;
激光切割机器人以众多优点而被广泛使用,然而当下的激光切割机器人大多是采用人工固定待切割工件的方式,当需要切割大量的小板材的时候,需要人工频繁的更换板材,大大影响了切割效率,因此,我们提出了激光切割器用操作台及激光切割机器人。
发明内容
本发明的目的是为了解决现有技术中在切割大量的小板材的时候需要人工频繁的更换板材而影响切割效率的问题,而提出的激光切割器用操作台及激光切割机器人。
为了实现上述目的,本发明采用了如下技术方案:激光切割器用操作台,包括底座,还包括:支撑座,通过第一传动部件与所述底座滑动连接;传动柱,通过第二传动部件与所述支撑座转动连接;驱动部件,设置在所述支撑座上;第二托板,设置在所述传动柱上;限位板,固定连接在所述第二托板的上表面;从动板,滑动连接在所述限位板内;电磁铁,固定连接在所述从动板上;传动机构,设置在所述底座靠近所述电磁铁的一端;板材,设置在所述传动机构上,所述第一传动部件包括固定连接在所述支撑座下表面的传动块,所述传动块位于所述底座内,且所述传动块与所述底座滑动连接,所述传动块内转动连接有传动筒,且所述传动块的前后两侧均固定连接有滑板,所述滑板与所述底座滑动连接,所述支撑座的下表面转动安装有若干车轮,所述底座的上端开设有与所述车轮相适配的车轮槽,所述驱动部件包括第一托板,所述第一托板的下端靠近四角位置均固定连接有第一伸缩腿,所述第一伸缩腿的下端与所述支撑座固定连接,所述第一托板的下表面位于若干所述第一伸缩腿之间设有若干第一电动推杆,所述第一托板的上表面固定连接有第一电机,所述第一电机的输出端固定安装有第一带轮、第三带轮,所述传动筒的一端通过连接筒固定连接有第二带轮,所述传动筒、连接筒的内表面螺纹连接有同一个第一丝杠,所述第一丝杠与所述底座固定连接,所述第一带轮与所述第二带轮之间设有第一皮带。
为了使电磁铁每次旋转角度为九十度,优选的,所述第二传动部件包括位于所述支撑座内的限位盘,所述限位盘与所述支撑座转动连接,所述限位盘的上端固定安装有从动锥齿轮,所述从动锥齿轮的上表面固定连接有驱动柱,所述传动柱的下表面固定连接有两个在水平面上相互垂直的驱动轨,所述驱动柱与所述驱动轨相适配,所述支撑座的上表面靠近所述传动柱的位置固定连接有支撑架,所述支撑架与所述传动柱转动连接。
为了驱使从动锥齿轮转动,优选的,所述从动锥齿轮靠近所述驱动部件的一端啮合连接有传动锥齿轮,所述传动锥齿轮远离所述从动锥齿轮的一侧固定连接有传动杆,所述传动杆远离所述从动锥齿轮的一端固定连接有第四带轮,所述第四带轮与所述第三带轮之间设有第二皮带。
为了使第一带轮、第三带轮、第四带轮、传动杆转动平稳,优选的,所述传动杆、第一带轮、第三带轮的外表面均转动连接有若干限位块,位于所述传动杆上的若干所述限位块与所述支撑座固定连接,位于所述第一带轮、第三带轮上的若干所述限位块均与所述第一托板固定连接。
为了方便电磁铁对板材的上下料,优选的,所述第二托板的下表面靠近四角位置均固定连接有第二伸缩腿,若干所述第二伸缩腿的下端均与所述传动柱固定连接,所述第二托板的下表面位于若干所述第二伸缩腿之间设有若干第二电动推杆。
为了使电磁铁可以移动到板材的下端,优选的,所述第二托板的上表面固定连接有第二电机,所述第二电机位于所述限位板远离所述传动机构的一端,所述电磁铁位于所述从动板远离所述第二电机的一端上表面,所述第二电机的输出端固定连接有第二丝杠,所述第二丝杠与所述从动板螺纹连接,所述第二丝杠与所述限位板转动连接。
为了方便定位板材在托架上的位置,优选的,所述传动机构上固定安装有托架,所述托架上靠近所述板材的位置开设有板材槽,所述板材通过所述板材槽与所述托架贴合。
激光切割机器人,包括所述的激光切割器用操作台和支架,所述支架上连接有机械手,所述机械手上安装有三维激光切割器,所述三维激光切割器位于所述底座的前侧。
与现有技术相比,本发明提供了激光切割器用操作台及激光切割机器人,具备以下有益效果:1、该操作台,通过设置了电磁铁对板材进行上下料,避免了采用人工对板材进行固定的方式,即避免了在切割小型板材的时候人工频繁的更换板材,继而可以提高切割效率;
2、该操作台,通过设置了第一电动推杆使驱动部件上移时,可以使驱动部件带动支撑座移动而不使电磁铁转动,第一电动推杆使驱动部件下移时,可以使驱动部件带动电磁铁转动而不使支撑座移动;
3、该操作台,通过设置了第二电机驱动第二丝杠使得从动板带动电磁铁移动,第二电动推杆通过第二托板带动电磁铁将板材托起或放下,即方便了通过电磁铁对板材的上下料。
4、该激光切割机器人,通过设置支架支撑三维激光切割器,由机械手带动三维激光切割器继而对板材进行切割。
该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本发明中通过电磁铁对板材进行上下料,使得板材的更换方便,避免了需要人工频繁的对板材进行更换固定,提高了切割效率。
附图说明
图1为本发明提出的激光切割器用操作台的驱动轨的立体结构示意图;
图2为本发明提出的激光切割器用操作台的托架的立体结构示意图;
图3为本发明提出的激光切割器用操作台的前视图;
图4为本发明提出的激光切割器用操作台的前视局部剖视图;
图5为本发明提出的激光切割器用操作台的底座的俯视图;
图6为本发明提出的激光切割器用操作台的底座的右视剖视图;
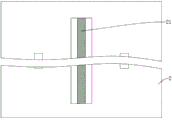
图7为本发明提出的激光切割器用操作台的传动柱的仰视图;
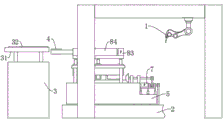
图8为本发明提出的激光切割机器人的前视图。
图中:1、三维激光切割器;2、底座;21、第一丝杠;3、传动机构;31、托架;32、板材;4、电磁铁;5、支撑座;51、传动块;511、滑板;512、传动筒;52、支撑架;521、传动柱;522、驱动轨;53、连接筒;54、第二带轮;55、限位块;56、传动杆;561、第四带轮;562、传动锥齿轮;57、限位盘;571、从动锥齿轮;572、驱动柱;6、第一托板;61、第一伸缩腿;62、第一电动推杆;7、第一电机;71、第一带轮;72、第三带轮;73、第一皮带;74、第二皮带;8、第二伸缩腿;81、第二托板;82、第二电动推杆;83、第二电机;84、限位板;85、从动板;86、第二丝杠。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
实施例1:参照图1-8,激光切割器用操作台,包括底座2,还包括:支撑座5,通过第一传动部件与底座2滑动连接;传动柱521,通过第二传动部件与支撑座5转动连接;驱动部件,设置在支撑座5上;第二托板81,设置在传动柱521上;限位板84,固定连接在第二托板81的上表面;从动板85,滑动连接在限位板84内;电磁铁4,固定连接在从动板85上;传动机构3,设置在底座2靠近电磁铁4的一端;板材32,设置在传动机构3上,第一传动部件包括固定连接在支撑座5下表面的传动块51,传动块51位于底座2内,且传动块51与底座2滑动连接,传动块51内转动连接有传动筒512,且传动块51的前后两侧均固定连接有滑板511,滑板511与底座2滑动连接,支撑座5的下表面转动安装有若干车轮,底座2的上端开设有与车轮相适配的车轮槽;驱动部件包括第一托板6,第一托板6的下端靠近四角位置均固定连接有第一伸缩腿61,第一伸缩腿61的下端与支撑座5固定连接,第一托板6的下表面位于若干第一伸缩腿61之间设有若干第一电动推杆62,第一托板6的上表面固定连接有第一电机7,第一电机7的输出端固定安装有第一带轮71、第三带轮72,传动筒512的一端通过连接筒53固定连接有第二带轮54,传动筒512、连接筒53的内表面螺纹连接有同一个第一丝杠21,第一丝杠21与底座2固定连接,第一带轮71与第二带轮54之间设有第一皮带73。
使用本装置时,通过现有的传动机构3带动板材32移动至与电磁铁4对齐的位置,由第二电机83正转驱动第二丝杠86与从动板85螺纹啮合,长方体形状的从动板85由于被限位板84限制自由度使得被驱动伸出限位板84,进而带动电磁铁4移动到板材32的下方,通过第二电动推杆82带动第二托板81上移,进而使电磁铁4将板材32托起至脱离托架31,此时板材32仍位于托架31上的板材槽内,只是板材32不与托架31接触,再通过第二电机83的反转驱使从动板85收进限位板84中,即使电磁铁4带动被托起的板材32离开托架31,后令第一电动推杆62带动驱动部件上移,即使第一皮带73被拉紧而第二皮带74松弛,第一电机7带动第一带轮71、第三带轮72转动,第一带轮71可以通过第一皮带73带动第二带轮54转动,而第三带轮72无法通过第二皮带74带动第四带轮561转动,第二带轮54带动连接筒53转动,连接筒53带动传动筒512转动,传动筒512与第一丝杠21相啮合,使得传动筒512被啮合发生移动,传动筒512通过传动块51带动支撑座5移动,即此时驱动部件可以通过第一传动部件驱动支撑座5移动,而无法通过第二传动部件使传动柱521转动,传动块51两侧的滑板511使得传动块51的移动平稳,车轮使得支撑座5相对底座2移动得顺畅,且车轮配合车轮槽可以进一步的对支撑座5的自由度进行限制,驱动部件反向运转,进而带动支撑座5远离托架31,移动到三维激光切割器1的后侧,此时驱使第一电动推杆62带动驱动部件下移,进而使被拉紧的第一皮带73松弛,而本为松弛状态的第二皮带74被拉紧,即此时驱动部件无法带动支撑座5移动,而可以通过第二传动部件驱使传动柱521向前旋转九十度,即带动电磁铁4将板材32移动至三维激光切割器1的工作空间内,从而对板材32进行切割加工,当切割完成后,驱动部件正向运转,进而通过第二传动部件驱使传动柱521向后旋转九十度,即带动电磁铁4将板材32移动至脱离三维激光切割器1的工作空间,后令驱动部件停止运转,再使第一电动推杆62带动驱动部件上移,此时驱动部件继续正向运转,即可通过第一传动部件使支撑座5带动电磁铁4移动靠近托架31,后令驱动部件停止运转,由第二电机83正转驱使从动板85带动电磁铁4移动至电磁铁4上的被切割完成的板材32位于托架31上的板材槽内,此时使电磁铁4断电,即使电磁铁4对板材32不再有吸力,后由第二电动推杆82带动第二托板81下移,即使电磁铁4上的被切割完成的板材32置入托架31上的板材槽内,后由第二电机83反转驱使从动板85带动电磁铁4远离托架31;
由传动机构3运转带动下一个托架31移动至与电磁铁4对齐的位置,再次由第二电机83正转驱使从动板85带动电磁铁4移动至板材32的下端并为电磁铁4通电,综上,即可避免在对大量的小型板材32进行切割时需要人工频繁的更换板材32,继而可以提高切割效率。
实施例2:参照图1、图4、图7,激光切割器用操作台,与实施例1基本相同,更进一步的是:第二传动部件包括位于支撑座5内的限位盘57,限位盘57与支撑座5转动连接,限位盘57的上端固定安装有从动锥齿轮571,从动锥齿轮571的上表面固定连接有驱动柱572,传动柱521的下表面固定连接有两个在水平面上相互垂直的驱动轨522,驱动柱572与驱动轨522相适配,支撑座5的上表面靠近传动柱521的位置固定连接有支撑架52,支撑架52与传动柱521转动连接。
由支撑架52使得传动柱521可以转动,当从动锥齿轮571被驱动转动时,将带动驱动柱572绕从动锥齿轮571的轴线转动,即使得转动的驱动柱572进入其中一个驱动轨522中从而带动传动柱521转动,当驱动柱572从进入的驱动轨522中出来时,此时传动柱521旋转九十度,采用两个在同一水平面相互垂直的驱动轨522使得驱动柱572在从进入的驱动轨522中出来后连续转动进入另一个驱动轨522中,而后再从进入的另一个驱动轨522中出来时,可以带动传动柱521转动一百八十度,即使得电磁铁4可以从三维激光切割器1的工作空间中移动至与托架31对齐后,继续向后旋转,继而使得电磁铁4位于支撑座5远离三维激光切割器1的一侧,使得便于对电磁铁4进行检修维护。
实施例3:参照图4,激光切割器用操作台,与实施例1基本相同,更进一步的是:从动锥齿轮571靠近驱动部件的一端啮合连接有传动锥齿轮562,传动锥齿轮562远离从动锥齿轮571的一侧固定连接有传动杆56,传动杆56远离从动锥齿轮571的一端固定连接有第四带轮561,第四带轮561与第三带轮72之间设有第二皮带74。
当第一电动推杆62带动第一托板6下移时,使得第三带轮72与第四带轮561之间的第二皮带74被拉紧,进而使得第一电机7可以通过第三带轮72带动第四带轮561转动,进而通过传动杆56带动传动锥齿轮562转动,使得传动锥齿轮562啮合带动从动锥齿轮571转动。
实施例4:参照图4,激光切割器用操作台,与实施例1基本相同,更进一步的是:传动杆56、第一带轮71、第三带轮72的外表面均转动连接有若干限位块55,位于传动杆56上的若干限位块55与支撑座5固定连接,位于第一带轮71、第三带轮72上的若干限位块55均与第一托板6固定连接,使得传动杆56、第一带轮71、第三带轮72、第四带轮561的转动平稳。
实施例5:参照图4,激光切割器用操作台,与实施例1基本相同,更进一步的是:第二托板81的下表面靠近四角位置均固定连接有第二伸缩腿8,若干第二伸缩腿8的下端均与传动柱521固定连接,第二托板81的下表面位于若干第二伸缩腿8之间设有若干第二电动推杆82。
通过第二电动推杆82带动第二托板81移动,继而可以带动电磁铁4移动。
实施例6:参照图3-4,激光切割器用操作台,与实施例1基本相同,更进一步的是:第二托板81的上表面固定连接有第二电机83,第二电机83位于限位板84远离传动机构3的一端,电磁铁4位于从动板85远离第二电机83的一端上表面,第二电机83的输出端固定连接有第二丝杠86,第二丝杠86与从动板85螺纹连接,第二丝杠86与限位板84转动连接。
通过限位板84限制长方体形状的从动板85的自由度,由第二电机83驱动第二丝杠86与从动板85啮合,继而驱使从动板85移动使得电磁铁4可以移动到板材32的下端,继而对板材32进行上下料,进而使得板材32的更换更加方便,以提高切割效率。
实施例7:参照图2-3,激光切割器用操作台,与实施例1基本相同,更进一步的是:传动机构3上固定安装有托架31,托架31上靠近板材32的位置开设有板材槽,板材32通过板材槽与托架31贴合。
方便定位板材32在托架31的位置。
实施例8:参照图8,激光切割机器人,包括激光切割器用操作台和支架,支架上连接有机械手,机械手上安装有三维激光切割器1,三维激光切割器1位于底座2的前侧。
由三维激光切割器1对板材32进行切割。
本发明中通过电磁铁4对板材32进行上下料,使得板材32的更换方便,避免了需要人工频繁的对板材32进行更换固定,提高了切割效率。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
Claims (8)
1.激光切割器用操作台,包括底座(2),其特征在于,还包括:
支撑座(5),通过第一传动部件与所述底座(2)滑动连接;
传动柱(521),通过第二传动部件与所述支撑座(5)转动连接;
驱动部件,设置在所述支撑座(5)上;
第二托板(81),设置在所述传动柱(521)上;
限位板(84),固定连接在所述第二托板(81)的上表面;
从动板(85),滑动连接在所述限位板(84)内;
电磁铁(4),固定连接在所述从动板(85)上;
传动机构(3),设置在所述底座(2)靠近所述电磁铁(4)的一端;
板材(32),设置在所述传动机构(3)上;
所述第一传动部件包括固定连接在所述支撑座(5)下表面的传动块(51),所述传动块(51)位于所述底座(2)内,且所述传动块(51)与所述底座(2)滑动连接,所述传动块(51)内转动连接有传动筒(512),且所述传动块(51)的前后两侧均固定连接有滑板(511),所述滑板(511)与所述底座(2)滑动连接,所述支撑座(5)的下表面转动安装有若干车轮,所述底座(2)的上端开设有与所述车轮相适配的车轮槽;
所述驱动部件包括第一托板(6),所述第一托板(6)的下端靠近四角位置均固定连接有第一伸缩腿(61),所述第一伸缩腿(61)的下端与所述支撑座(5)固定连接,所述第一托板(6)的下表面位于若干所述第一伸缩腿(61)之间设有若干第一电动推杆(62),所述第一托板(6)的上表面固定连接有第一电机(7),所述第一电机(7)的输出端固定安装有第一带轮(71)、第三带轮(72),所述传动筒(512)的一端通过连接筒(53)固定连接有第二带轮(54),所述传动筒(512)、连接筒(53)的内表面螺纹连接有同一个第一丝杠(21),所述第一丝杠(21)与所述底座(2)固定连接,所述第一带轮(71)与所述第二带轮(54)之间设有第一皮带(73)。
2.根据权利要求1所述的激光切割器用操作台,其特征在于,所述第二传动部件包括位于所述支撑座(5)内的限位盘(57),所述限位盘(57)与所述支撑座(5)转动连接,所述限位盘(57)的上端固定安装有从动锥齿轮(571),所述从动锥齿轮(571)的上表面固定连接有驱动柱(572),所述传动柱(521)的下表面固定连接有两个在水平面上相互垂直的驱动轨(522),所述驱动柱(572)与所述驱动轨(522)相适配,所述支撑座(5)的上表面靠近所述传动柱(521)的位置固定连接有支撑架(52),所述支撑架(52)与所述传动柱(521)转动连接。
3.根据权利要求2所述的激光切割器用操作台,其特征在于,所述从动锥齿轮(571)靠近所述驱动部件的一端啮合连接有传动锥齿轮(562),所述传动锥齿轮(562)远离所述从动锥齿轮(571)的一侧固定连接有传动杆(56),所述传动杆(56)远离所述从动锥齿轮(571)的一端固定连接有第四带轮(561),所述第四带轮(561)与所述第三带轮(72)之间设有第二皮带(74)。
4.根据权利要求3所述的激光切割器用操作台,其特征在于,所述传动杆(56)、第一带轮(71)、第三带轮(72)的外表面均转动连接有若干限位块(55),位于所述传动杆(56)上的若干所述限位块(55)与所述支撑座(5)固定连接,位于所述第一带轮(71)、第三带轮(72)上的若干所述限位块(55)均与所述第一托板(6)固定连接。
5.根据权利要求1所述的激光切割器用操作台,其特征在于,所述第二托板(81)的下表面靠近四角位置均固定连接有第二伸缩腿(8),若干所述第二伸缩腿(8)的下端均与所述传动柱(521)固定连接,所述第二托板(81)的下表面位于若干所述第二伸缩腿(8)之间设有若干第二电动推杆(82)。
6.根据权利要求1所述的激光切割器用操作台,其特征在于,所述第二托板(81)的上表面固定连接有第二电机(83),所述第二电机(83)位于所述限位板(84)远离所述传动机构(3)的一端,所述电磁铁(4)位于所述从动板(85)远离所述第二电机(83)的一端上表面,所述第二电机(83)的输出端固定连接有第二丝杠(86),所述第二丝杠(86)与所述从动板(85)螺纹连接,所述第二丝杠(86)与所述限位板(84)转动连接。
7.根据权利要求1所述的激光切割器用操作台,其特征在于,所述传动机构(3)上固定安装有托架(31),所述托架(31)上靠近所述板材(32)的位置开设有板材槽,所述板材(32)通过所述板材槽与所述托架(31)贴合。
8.激光切割机器人,其特征在于,包括权利要求1所述的激光切割器用操作台和支架,所述支架上连接有机械手,所述机械手上安装有三维激光切割器(1),所述三维激光切割器(1)位于所述底座(2)的前侧。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110825944.2A CN113275775B (zh) | 2021-07-21 | 2021-07-21 | 激光切割器用操作台及激光切割机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110825944.2A CN113275775B (zh) | 2021-07-21 | 2021-07-21 | 激光切割器用操作台及激光切割机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113275775A true CN113275775A (zh) | 2021-08-20 |
| CN113275775B CN113275775B (zh) | 2021-09-24 |
Family
ID=77286873
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110825944.2A Active CN113275775B (zh) | 2021-07-21 | 2021-07-21 | 激光切割器用操作台及激光切割机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113275775B (zh) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109676271A (zh) * | 2019-02-13 | 2019-04-26 | 扬州博恩德机电科技有限公司 | 一种可自动上料带位置调整的激光切割机 |
| CN210366019U (zh) * | 2019-07-11 | 2020-04-21 | 南宁职业技术学院 | 一种物流装卸装置 |
| CN210499413U (zh) * | 2019-08-13 | 2020-05-12 | 湖北省奔翔汽配有限公司 | 一种零部件加工用工件转移装置 |
| CN210548985U (zh) * | 2019-09-09 | 2020-05-19 | 沈阳斯麦尔科技有限公司 | 一种激光切割机用上料机构 |
| CN211812331U (zh) * | 2019-10-21 | 2020-10-30 | 张帆 | 一种物流用货物箱堆放码齐装置 |
| CN112456111A (zh) * | 2020-12-05 | 2021-03-09 | 谢平平 | 一种集自动上料和切割一体的板材运输机 |
-
2021
- 2021-07-21 CN CN202110825944.2A patent/CN113275775B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109676271A (zh) * | 2019-02-13 | 2019-04-26 | 扬州博恩德机电科技有限公司 | 一种可自动上料带位置调整的激光切割机 |
| CN210366019U (zh) * | 2019-07-11 | 2020-04-21 | 南宁职业技术学院 | 一种物流装卸装置 |
| CN210499413U (zh) * | 2019-08-13 | 2020-05-12 | 湖北省奔翔汽配有限公司 | 一种零部件加工用工件转移装置 |
| CN210548985U (zh) * | 2019-09-09 | 2020-05-19 | 沈阳斯麦尔科技有限公司 | 一种激光切割机用上料机构 |
| CN211812331U (zh) * | 2019-10-21 | 2020-10-30 | 张帆 | 一种物流用货物箱堆放码齐装置 |
| CN112456111A (zh) * | 2020-12-05 | 2021-03-09 | 谢平平 | 一种集自动上料和切割一体的板材运输机 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113275775B (zh) | 2021-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107598368B (zh) | 激光切割机 | |
| CN214443922U (zh) | 一种便于上下料的激光切割机 | |
| CN110524344B (zh) | 一种用于磨削硅棒平面及倒角的自动化设备及加工方法 | |
| CN211030386U (zh) | 一种锯片和铣刀自动切换的木材加工设备 | |
| CN215941835U (zh) | 圆锯刀头激光加工设备 | |
| CN113275775B (zh) | 激光切割器用操作台及激光切割机器人 | |
| CN220073586U (zh) | 一种横向推拉式工作台激光切割机 | |
| CN217253684U (zh) | 双龙门激光切割系统 | |
| CN215966951U (zh) | 一种悬臂式激光切割机 | |
| CN218016450U (zh) | 一种可自动上下料的激光切割机 | |
| CN116329684A (zh) | 放电金属丝机加工装置 | |
| CN213730552U (zh) | 一种加工中心用的多轴加工机构 | |
| CN112317987B (zh) | 一种焊齿机用上下料装置及焊齿机 | |
| CN214212922U (zh) | 一种高效率龙门加工中心 | |
| CN113560711A (zh) | 圆锯刀头激光加工设备及圆锯刀头激光加工方法 | |
| CN211759298U (zh) | 一种激光切割用辅助上料装置 | |
| CN220761389U (zh) | 一种激光切割机用定位机构 | |
| CN214868999U (zh) | 一种地铁接线箱板材加工中心 | |
| CN219484567U (zh) | 一种晶圆激光隐切装置 | |
| CN110814627B (zh) | 一种用于机器人焊接的平台 | |
| CN213196157U (zh) | 一种带有送料机构的激光切割机 | |
| CN218926436U (zh) | 一种用于园林数控手板锯的磨齿机 | |
| CN217394063U (zh) | 自动上下料激光切割装置 | |
| CN217224129U (zh) | 一种激光雕刻切割机独立升降平台 | |
| CN220407461U (zh) | 一种可便捷上料的激光切割机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CB03 | Change of inventor or designer information |
Inventor after: Chen Qiaomei Inventor after: Wang Xiaotan Inventor before: Wang Fengqiu Inventor before: Chen Qiaomei Inventor before: Wang Xiaotan |
|
| CB03 | Change of inventor or designer information |