CN113057504A - 搅拌机不掉速控制方法、装置及搅拌机 - Google Patents
搅拌机不掉速控制方法、装置及搅拌机 Download PDFInfo
- Publication number
- CN113057504A CN113057504A CN202110242860.6A CN202110242860A CN113057504A CN 113057504 A CN113057504 A CN 113057504A CN 202110242860 A CN202110242860 A CN 202110242860A CN 113057504 A CN113057504 A CN 113057504A
- Authority
- CN
- China
- Prior art keywords
- load
- motor
- gear
- gradient
- chopping mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 30
- 238000012790 confirmation Methods 0.000 claims description 22
- 238000003756 stirring Methods 0.000 claims description 18
- 238000013507 mapping Methods 0.000 claims description 9
- 238000000638 solvent extraction Methods 0.000 claims description 3
- 238000004519 manufacturing process Methods 0.000 abstract description 9
- 239000007787 solid Substances 0.000 abstract description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 61
- 238000010586 diagram Methods 0.000 description 11
- 230000008569 process Effects 0.000 description 11
- 239000000463 material Substances 0.000 description 7
- 230000008859 change Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 3
- 239000012257 stirred material Substances 0.000 description 3
- 230000006872 improvement Effects 0.000 description 2
- 238000002360 preparation method Methods 0.000 description 2
- 235000010627 Phaseolus vulgaris Nutrition 0.000 description 1
- 244000046052 Phaseolus vulgaris Species 0.000 description 1
- 230000036528 appetite Effects 0.000 description 1
- 235000019789 appetite Nutrition 0.000 description 1
- 235000013312 flour Nutrition 0.000 description 1
- 235000013372 meat Nutrition 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 235000014366 other mixer Nutrition 0.000 description 1
- 239000007858 starting material Substances 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 235000013311 vegetables Nutrition 0.000 description 1
Images









Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47J—KITCHEN EQUIPMENT; COFFEE MILLS; SPICE MILLS; APPARATUS FOR MAKING BEVERAGES
- A47J43/00—Implements for preparing or holding food, not provided for in other groups of this subclass
- A47J43/04—Machines for domestic use not covered elsewhere, e.g. for grinding, mixing, stirring, kneading, emulsifying, whipping or beating foodstuffs, e.g. power-driven
- A47J43/07—Parts or details, e.g. mixing tools, whipping tools
- A47J43/08—Driving mechanisms
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Food Science & Technology (AREA)
- Food-Manufacturing Devices (AREA)
- Mixers Of The Rotary Stirring Type (AREA)
Abstract
本发明适用于智能家电设备技术领域,提供了一种搅拌机不掉速控制方法、装置及搅拌机,方法包括获取搅拌机的启动信息,其中,启动信息包括启动档位以及与启动档位对应的固定的档位斩波方式;根据档位斩波方式驱动搅拌机的电机,并采集电机的电流信息;根据电流信息确定搅拌机的当前负载梯度,其中,搅拌机包括至少两个档位,各档位包括预设数量的负载梯度,各负载梯度包括对应的平均电流信息和电机不掉速的固速斩波方式;根据当前负载梯度的固速斩波方式调整电机的驱动功率。本申请通过根据电机的电流确定负载,然后根据该负载对应的固速斩波方式调整电机的驱动功率,不需要增加霍尔反馈即可实现电机实时调节不掉速的功能,降低搅拌机的生产成本。
Description
技术领域
本发明属于智能家电技术领域,尤其涉及一种搅拌机不掉速控制方法、装置及搅拌机。
背景技术
随着生活水平的提高,人们越来越享受高质量的生活方式,其中,美食最能给人们带来优质生活感受,美食除了好吃以为,制作美食的过程也是一种享受和放松的经历,在美食的制作过程中通常需要对食材进行搅拌,以将食材打散打碎或者混合拌匀等,食材的搅拌可由人工手动完成或者使用搅拌机实现,但是相比手动搅拌,搅拌机的效率更高、搅拌效果更好。
搅拌机通常包括搅拌电机和容器,容器用于盛装搅拌料,电机的动力轴安装有刀头,在使用时,电机的刀头伸入容器中对搅拌料进行搅拌,另外一些搅拌机是将电机安装在容器的底部,电机的动力轴穿过容器底部伸入容器内与刀头组装,将搅拌料加入容器中启动电机即可对搅拌料进行搅拌。但是,搅拌机在搅拌过程中,对于不同的搅拌料(例如豆类、粉面类、蔬菜类和肉类),搅拌机的单机会出现不同程度的掉速情况,甚至对于同种搅拌料也会出现搅打速度随着搅拌料增多而变小的情况,搅拌效果不佳。为解决上述问题,现有的搅拌机通常采用的方式是增加霍尔反馈使搅拌机不掉速,但是,增加霍尔反馈需要对搅拌机进行改动,而且使用霍尔反馈也会提高搅拌机的生产成本。
发明内容
本发明实施例提供一种搅拌机不掉速控制方法,旨在解决搅拌机带霍尔反馈实现电机不掉速增加搅拌机的生产成本的问题。
本发明实施例是这样实现的,一种搅拌机不掉速控制方法,包括:
获取搅拌机的启动信息,其中,启动信息包括启动档位以及与启动档位对应的固定的档位斩波方式;
根据档位斩波方式驱动搅拌机的电机,并采集电机的电流信息;
根据电流信息确定搅拌机的当前负载梯度,其中,搅拌机包括至少两个档位,各档位包括预设数量的负载梯度,各负载梯度包括对应的平均电流信息和电机不掉速的固速斩波方式;
根据当前负载梯度的固速斩波方式调整电机的驱动功率。
第二方面,本申请还提供一种搅拌机不掉速控制装置,装置包括:
信息获取模块,用于获取搅拌机的启动信息,其中,启动信息包括启动档位以及与启动档位对应的固定的档位斩波方式;
信息采集模块,用于根据档位斩波方式驱动搅拌机的电机,并采集电机的电流信息;
梯度确定模块,用于根据电流信息确定搅拌机的当前负载梯度,其中,搅拌机包括至少两个档位,各档位包括预设数量的负载梯度,各负载梯度包括对应的平均电流信息和电机不掉速的固速斩波方式;
功率调整模块,用于根据当前负载梯度的固速斩波方式调整电机的驱动功率。
第三方面,本申请还提供一种搅拌机,搅拌机包括如上述的搅拌机不掉速控制装置。
本申请实施例通过在搅拌机启动时,获取搅拌机的启动档位和该启动档位对应的档位斩波方式,并根据该档位斩波方式驱动搅拌机的电机,同时采集电机的电流信息,由于搅拌机的各档位分成预设数量的负载梯度,且每个负载梯度包括电机没调节前的平均电流信息和电机不掉速的固速斩波方式,通过电机的电流信息即可确定搅拌机当前的当前负载梯度,然后再根据该当前负载梯度的固速斩波方式调整电机的驱动功率,从而使得电机转动不掉速,不需要增加霍尔反馈即可实现电机实时调节不掉速功能,不需要对搅拌机进行硬件改动,降低搅拌机的生产成本。
附图说明
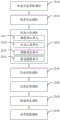
图1是本申请搅拌机不掉速控制方法一个实施例的具体流程示意图;
图2是本申请搅拌机不掉速控制方法一个实施例记录各负载梯度的平均电流和电机功率值的流程示意图;
图3是本申请搅拌机不掉速控制方法一个实施例计算负载梯度的基本流程示意图;
图4是本申请搅拌机不掉速控制方法一个实施例记录电流平均值的基本流程示意图;
图5是本申请搅拌机不掉速控制方法一个实施例记录电机不掉速的输出功率的基本流程示意图;
图6是本申请搅拌机不掉速控制装置一个实施例的模块示意图;
图7是本申请搅拌机不掉速控制装置另一个实施例的模块示意图;
图8是本申请搅拌机不掉速控制装置一个实施例梯度划分模块的模块示意图;
图9是本申请搅拌机不掉速控制装置一个实施例信息记录模块的模块示意图;
图10是本申请搅拌机不掉速控制装置另一个实施例信息记录模块的模块示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
现有的搅拌机实现电机转动不掉速通常是通过增加霍尔反馈实现,提高了搅拌机的生产成本。本申请通过根据电机的电流确定负载,然后根据该负载对应的固速斩波方式调整电机的驱动功率,不需要增加霍尔反馈即可实现电机实时调节不掉速功能,降低搅拌机的生产成本。
实施例一
在一些可选实施例中,请参照图1,图1是本申请一种搅拌机不掉速控制方法一个实施例的流程示意图。
如图1所示,本申请第一方面提供一种搅拌机不掉速控制方法,包括:
S1100、获取搅拌机的启动信息,其中,启动信息包括启动档位以及与启动档位对应的固定的档位斩波方式;
搅拌机设置有处理器,本申请提供的搅拌机不掉速控制方法由处理器执行实现,处理器可以是设置于搅拌机的实际的处理器,也可以是云端的虚拟处理器,在此不做具体限定。
搅拌机启动时,处理器获取搅拌机的启动档位以及该启动档位对应的档位斩波方式,在实施时,搅拌机设置有至少两个档位,每个档位对应的电机转速不同,则各档位的档位斩波方式也不同,档位斩波方式为对应档位下用于驱动搅拌机电机工作的固定电压,以搅拌机设置有3个档位为例,包括1档、2档和3档,其中,1档、2档和3档下搅拌机电机的档位斩波方式分别为斩波方式A、斩波方式B和斩波方式C,当搅拌机启动时,例如用户将搅拌机的档位调至2档并启动,处理器即可获取搅拌机启动时的档位为2挡,该档位对应的档位斩波方式为斩波方式B。
S1200、根据档位斩波方式驱动搅拌机的电机,并采集电机的电流信息;
处理器系统根据启动档位的档位斩波方式驱动搅拌机的电机工作,即按照系统设定的对应该档位的默认固定电压驱动电机,还是以上述搅拌机2档启动为例,处理器以斩波方式B驱动搅拌机的电机工作,同时对电机的电流进行采集以获取电机的电流信息。
S1300、根据电流信息确定搅拌机的当前负载梯度,其中,搅拌机包括至少两个档位,各档位包括预设数量的负载梯度,各负载梯度包括对应的平均电流信息和电机不掉速的固速斩波方式;
在一些实施例中,电流信息可以是电机在预设时间段内的平均电流信息,然后根据电机的平均电流信息即可确定搅拌机的当前负载梯度,在实施时,搅拌机的各档位设置有预设数量的负载梯度,在搅拌机进行使用之前,搅拌机已经设置好了相应的负载梯度,并将各档位的各负载梯度的相关信息保存至处理器,例如各档位下各负载梯度对应的平均电流信息和固速斩波方式。负载梯度的相关信息可以由用户自行设置,或者由搅拌机的生产厂商进行设置,以预设数量为10为例,在各档位下按照10个梯度向搅拌机的杯中加入负载,例如分别加入十个等份的水直至最大容量,在同一档位下,向搅拌机中加入不同的负载梯度的负载时,搅拌机以该档位的固定的档位斩波方式驱动电机,导致不同负载梯度下的电机的电流值不同,处理器记录各负载梯度下电机的电流信息,而且向搅拌机中加入的负载越多时电机掉速越多,为使搅拌机的电机转速保持不变,则需要调整电机的斩波方式以增大电机的功率直至电机转速不掉速,系统将电机调整斩波方式后转速不掉速的斩波方式作为固速斩波方式。在搅拌机使用过程中,处理器根据实时采集到的电机的平均电流即可确定搅拌机的当前负载梯度。
S1400、根据当前负载梯度的固速斩波方式调整电机的驱动功率。
确定搅拌机当前的负载梯度后,系统根据该当前负载梯度即可确定对应的固速斩波方式,该固速斩波方式即在当前档位下使电机不掉速的固定电压,处理器系统根据该当前负载梯度的固速斩波方式对电机进行调整,从而使得电机不掉速。在一些实施例中,以搅拌机包括3个档位为例,分别为1档、2档和3档,各档位包括3个负载梯度,分别为梯度1、梯度2和梯度3,1档、2档和3档的档位斩波方式分别为W10、W20和W30,搅拌机的处理器保持有各档位下各负载梯度的平均电流信息和固速斩波方式,平均电流信息和固速斩波方式的记录过程如下:
搅拌机启动后,记录各档位的电机转速,1档的电机转速为A,2档的电机转速为B,3档的电机转速为C。
在各档位下按3个梯度向搅拌机的杯中加水,例如梯度1、梯度2和梯度3加水分别为1/3杯、2/3杯和1杯,并在加水过程中记录电机的电流平均值和斩波方式,以1档为例,向搅拌机的杯中加入1/3杯水并启动搅拌机,此时记录电流平均值为I11,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W11,则1档位下梯度1的平均电流信息和固速斩波方式分别为I11和W11。还是在1档下,向搅拌机杯中再次加入1/3杯水并启动搅拌机,杯中共有2/3杯水,此时记录电机的电流平均值为I12,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W12,则1档位下梯度2的平均电流信息和固速斩波方式分别为I12和W12。同理,在1档下,向搅拌机杯中再次加入1/3杯水并启动搅拌机,杯中共有1杯水,此时记录电流平均值为I13,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W13,则1档位下梯度3的平均电流信息和固速斩波方式分别为I13和W13。
依次类推,搅拌机2档位下梯度1的平均电流信息和固速斩波方式分别为I21和W21,搅拌机2档位下梯度2的平均电流信息和固速斩波方式分别为I22和W22,搅拌机2档位下梯度3的平均电流信息和固速斩波方式分别为I23和W23,搅拌机3档位下梯度1的平均电流信息和固速斩波方式分别为I31和W31,搅拌机3档位下梯度2的平均电流信息和固速斩波方式分别为I32和W32,搅拌机3档位下梯度3的平均电流信息和固速斩波方式分别为I33和W33。当启动搅拌机时,系统首先按照启动档位的档位斩波方式驱动电机,例如以2档启动搅拌机时,则按照W20驱动电机并采集电机的电流信息,然后根据该电流信息确定搅拌机的当前负载梯度,例如搅拌机的杯中有1杯水,从而确定搅拌机的当前负载梯度为2档位下梯度3,然后将电机的斩波方式调整到2档位下梯度3的固速斩波方式W23,使得电机保持2档位的转速不变。
本申请通过在搅拌机启动时,获取搅拌机的启动档位和档位斩波方式,并根据该档位斩波方式驱动搅拌机的电机,同时采集电机的电流信息,由于搅拌机的各档位分成预设数量的负载梯度,且每个负载梯度包括电机没调节前的平均电流信息和电机不掉速的固速斩波方式,通过电机的电流信息即可确定搅拌机当前的当前负载梯度,然后再根据该当前负载梯度的固速斩波方式调整电机的驱动功率,从而使得电机转动不掉速,不需要增加霍尔反馈即可实现电机实时调节不掉速功能,不需要对搅拌机进行硬件改动,降低搅拌机的生产成本。
实施例二
在一些可选实施例中,请参阅图2,图2是本申请一个实施例记录各负载梯度的平均电流和电机功率值的流程示意图。
如图2所示,获取搅拌机的启动信息的步骤之前,本申请还包括如下述步骤;
S1010、获取搅拌机无负载时各档位下电机的空载转速以及电机保持空载转速不掉速时的档位斩波方式;
在一些实施例中,以搅拌机包括3个档位为例,分别为1档、2档和3档,搅拌机空载启动后,处理器记录各档位的电机转速和档位斩波方式,例如上述的1档的电机转速为A,1档的档位斩波方式为W10,2档的电机转速为B,2档的档位斩波方式为W20,3档的电机转速为C,3档的档位斩波方式为W30。
S1020、将各档位划分为预设数量的负载梯度;
负载梯度的数量可以由用户自行设置,例如用户在负载梯度的设置选项中负载梯度的数量选择4个,系统根据用户的操作将各负载梯度划分为4个负载梯度。在另一些实施例中,负载梯度的数量还可以根据搅拌机的杯容量进行设置,请参阅图3,图3是本申请一个实施例划分负载梯度的流程示意图。
实施例三
在一些可选实施例中,请参阅图3,图3是本申请一个实施例计算负载梯度的流程示意图。
如图3所示,将各档位划分为预设数量的负载梯度的步骤,包括如下述步骤:
S1021、获取搅拌机的额定最大负载信息;
S1022、根据预设的梯度信息列表和额定最大负载信息确定负载梯度的数量以及各负载梯度的负载信息。
搅拌机的额定最大负载信息和梯度信息列表可保存于处理器,额定最大负载信息即搅拌机的容量信息,处理器根据梯度信息列表和搅拌机的容量计算负载梯度的数量,在实施时,梯度信息列表中包括不同容量和不同负载梯度数量之间的对应关系,例如梯度信息列表中包括容量1、容量2和容量3,容量1、容量2和容量3对应的负载梯度的数量分别为a、b和c,当搅拌机的容量信息对应容量1时,确定将搅拌机的各档位划分为a个负载梯度,然后根据该容量信息和负载梯度的数量计算各负载梯度的负载信息,例如搅拌机的容量为容量1,则搅拌机的各档位下的各负载梯度为容量1/a。
S1030、针对各档位,在向搅拌机中添加与各负载梯度对应的负载时,记录电机在对应档位的档位斩波方式下的电流平均值,并记录电机调整斩波方式后保持控制转速不掉速的固定的固速斩波方式。
在一些实施例中,以搅拌机包括3个档位为例,分别为1档、2档和3档,各档位包括4个负载梯度,分别为梯度1、梯度2、梯度3和梯度4,记录各档位下各负载梯度的平均电流信息和固速斩波方式的过程如下:
搅拌机启动后,记录各档位的电机转速,1档的电机转速为A,2档的电机转速为B,3档的电机转速为C。
在各档位下按4个梯度向搅拌机的杯中加水,例如梯度1、梯度2、梯度3和梯度4加水分别为1/4杯、2/4杯、3/4杯和1杯,并在加水过程中记录电机的电流平均值和斩波方式。
以1档为例,在1档下,启动搅拌机并向杯中加入1/4杯水,然后记录电机的电流平均值,电流平均值为电机进行斩波方式调整之前的电流平均值,然后调整电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为1档下梯度1的固速斩波方式;再次向杯中加入1/4杯水,此时杯中共有1/2杯水,记录电机的电流平均值,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为1档下梯度2的固速斩波方式;再次向杯中加入1/4杯水,此时杯中共有3/4杯水,然后记录电机的电流平均值,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为1档下梯度3的固速斩波方式;再次向杯中加入1/4杯水,此时杯中共有1杯水,然后记录电机的电流平均值,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为1档下梯度4的固速斩波方式,从而将各档位的各负载梯度的平均电流值和固速斩波方式均保存至处理器中。
实施例四
在一些可选实施例中,请参阅图4,图4是本申请一个实施例记录电流平均值的流程示意图。
如图4所示,记录电机在对应档位的档位斩波方式下的电流平均值的步骤,包括如下述步骤:
S1031、获取向搅拌机中加入负载时的负载确认信息,其中,所述负载确认信息包括与搅拌机中的负载对应的负载梯度;
在实施时,向搅拌机中加入负载由人工或者其他测试系统操作完成,以人工为例,在向搅拌机中加入负载时,操作人员会输入包括负载梯度的负载确认信息,例如搅拌机设置有操作界面,该操作界面包括档位选项、负载梯度选项以及确认选项等,操作人员向搅拌机的杯中加入水,然后根据加入水的量在操作界面中设置负载梯度并确认,系统即可获取负载确认信息。
S1032、记录电机在对应档位的档位斩波方式下运行的电流平均值,并建立电流平均值与对应的负载梯度的映射关系。
搅拌机根据对应档位的档位斩波方式启动,系统记录电机的电流平均值,例如记录电机在预设时间段(10秒、20秒或者30秒)内的电流平均值,然后建立电流平均值与负载梯度的映射关系,还是以上述按4个梯度向搅拌机的杯中加水为例,在1档下,加入1/4杯水的负载时,系统确认负载梯度为梯度1,记录电机的电流平均值为I11,则1档下梯度1的平均电流信息为I11,同理,再向杯中加入1/4杯水,此时杯中的水达到2/4杯,系统确认负载梯度为梯度2,记录电流平均值为I12,则1档下梯度2的平均电流信息为I12。而在2档下,当杯中的水达到2/4杯,系统确认负载梯度为梯度2,则记录电流平均值为I22,则2档下梯度2的平均电流信息为I22。
针对各负载梯度,在记录电流平均值之后,调整搅拌机电机的斩波方式以使电机的转速达到当前档位的空载转速,并记录电机调整后的固速斩波方式,请参阅图5,图5是本申请一个实施例记录电机不掉速的固速斩波方式的流程示意图。
实施例四
如图5所示,记录电机调整斩波方式后保持空载转速不掉速的固定的固速斩波方式的步骤,包括如下述步骤:
S1033、获取电机转速调整的调整确认信息;
S1034、根据调整确认信息调整电机的斩波方式以使电机保持对应档位的空载转速不掉速,记录电机的固速斩波方式,并建立固速斩波方式与对应的负载梯度的映射关系。
不同档位的电机的转速不同,为保持电机转速不变,需要调整电机的斩波方式,例如调整电机的电压,在实施时,在向搅拌机中加入负载后,操作人员会操作界面中确认进行电机转速调整,系统即可获取调整确认信息,系统根据该调整确认信息调整电机的斩波方式,从而使得电机的转速不掉速,系统将电机调整后的斩波方式记录为固速斩波方式,然后建立固速斩波方式与对应负载梯度的映射关系。
例如上述1档的电机转速为A,2档的电机转速为B,3档的电机转速为C,各档位包括4个负载梯度,在1档下,搅拌机启动时,向杯中加入1/4杯水,并记录电机的电流平均值为I11,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W11,则1档位下梯度1的平均电流信息和固速斩波方式分别为I11和W11。然后再向杯中加入1/4杯水,此时杯中的水达到2/4杯,记录电流平均值为I12,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W12,则1档位下梯度2的平均电流信息和固速斩波方式分别为I12和W12。然后再向杯中加入1/4杯水,此时杯中的水达到3/4杯,记录电流平均值为I13,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W13,则1档位下梯度3的平均电流信息和固速斩波方式分别为I13和W13。然后再向杯中加入1/4杯水,此时杯中的水为1杯达到最大容量,记录电流平均值为I14,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式值W14,则1档位下梯度4的平均电流信息和固速斩波方式分别为I14和W14。
同理,在2档下,启动搅拌机并向杯中加入1/4杯水,此时记录电流平均值为I21,然后调整搅拌机电机的斩波方式以使电机的转速达到B,此时记录电机的斩波方式为W21,则2档位下梯度1的平均电流信息和固速斩波方式分别为I21和W21。然后再向杯中加入1/4杯水,此时杯中的水达到2/4杯,记录电流平均值为I22,然后调整搅拌机电机的斩波方式以使电机的转速达到B,此时记录电机的斩波方式为W22,则2档位下梯度2的平均电流信息和固速斩波方式分别为I22和W22。然后再向杯中加入1/4杯水,此时杯中的水达到3/4杯,记录电流平均值为I23,然后调整搅拌机电机的斩波方式以使电机的转速达到B,此时记录电机的斩波方式为W23,则2档位下梯度3的平均电流信息和固速斩波方式分别为I23和W23。然后再向杯中加入1/4杯水,此时杯中的水为1杯达到最大容量,记录电流平均值为I24,然后调整搅拌机电机的斩波方式以使电机的转速达到B,此时记录电机的斩波方式为W24,则2档位下梯度4的平均电流信息和固速斩波方式分别为I24和W24。
在3档下,启动搅拌机并向杯中加入1/4杯水,此时记录电流平均值为I31,然后调整搅拌机电机的斩波方式以使电机的转速达到C,此时记录电机的斩波方式为W31,则3档位下梯度1的平均电流信息和固速斩波方式分别为I31和W31。然后再向杯中加入1/4杯水,此时杯中的水达到2/4杯,记录电流平均值为I32,然后调整搅拌机电机的斩波方式以使电机的转速达到C,此时记录电机的斩波方式为W32,则3档位下梯度2的平均电流信息和固速斩波方式分别为I32和W32。然后再向杯中加入1/4杯水,此时杯中的水达到3/4杯,记录电流平均值为I33,然后调整搅拌机电机的斩波方式以使电机的转速达到C,此时记录电机的斩波方式为W33,则3档位下梯度3的平均电流信息和固速斩波方式分别为I33和W33。然后再向杯中加入1/4杯水,此时杯中的水为1杯达到最大容量,记录电流平均值为I34,然后调整搅拌机电机的斩波方式以使电机的转速达到C,此时记录电机的斩波方式为W34,则3档位下梯度4的平均电流信息和固速斩波方式分别为I34和W34。
各档位的各负载的平均电流信息和固速斩波方式设置于处理器中,在搅拌机的使用过程中,用户将负载添加至搅拌机杯中,然后按键启动,例如1档启动,系统根据用户操作确定启动档位,然后以该启动档位的档位斩波方式驱动搅拌机电机,并采集电机的电流信息,然后根据该电流信息即可确定当前的负载梯度,例如电流信息对应上述的I13,则搅拌机的当前负载为梯度3,然后确认档位1下梯度3的固速斩波方式为W13,并根据W13调整电机的斩波方式,从而使得电机的转速不掉速。
实施例六
在一些可选实施例中,本申请一个实施例还提供一种搅拌机不掉速控制装置,请参阅图6,图6是本申请搅拌机不掉速控制装置一个实施例的模块结构示意图。
如图6所示,本申请提供的搅拌机不掉速控制装置包括:
信息获取模块2100,用于获取搅拌机的启动信息,其中,启动信息包括启动档位以及与启动档位对应的固定的档位斩波方式;
信息采集模块2200,用于根据档位斩波方式驱动搅拌机的电机,并采集电机的电流信息;
梯度确定模块2300,用于根据电流信息确定搅拌机的当前负载梯度,其中,搅拌机包括至少两个档位,各档位包括预设数量的负载梯度,各负载梯度包括对应的平均电流信息和电机不掉速的固速斩波方式;
功率调整模块2400,用于根据当前负载梯度的固速斩波方式调整电机的驱动功率。
本申请通过在搅拌机启动时,获取搅拌机的启动档位和与启动档位对应的档位斩波方式,并根据该档位斩波方式驱动搅拌机的电机,同时采集电机的电流信息,由于搅拌机的各档位分成预设数量的负载梯度,且每个负载梯度包括电机没调节前的平均电流信息和电机不掉速的固速斩波方式,通过电机的电流信息即可确定搅拌机当前的当前负载梯度,然后再根据该当前负载梯度的固速斩波方式调整电机的驱动功率,从而使得电机转动不掉速,不需要增加霍尔反馈即可实现电机实时调节不掉速功能,不需要对搅拌机进行硬件改动,降低搅拌机的生产成本。
在一些可选实施例中,请参阅图7,本申请提供的搅拌机不掉速控制装置还包括:
转速信息获取模块2010,用于获取搅拌机无负载时各档位下电机的空载转速以及电机保持空载转速不掉速时的档位斩波方式;
梯度划分模块2020,用于将各档位划分为预设数量的负载梯度;
信息记录模块2030,用于在向搅拌机中添加与各负载梯度对应的负载时,记录电机在对应档位的所述档位斩波方式下的电流平均值,并记录电机调整斩波方式后保持空载转速不掉速的固定的固速斩波方式。
在一些可选实施例中,请参阅图8,本申请提供的搅拌机不掉速控制装置的梯度划分模块2020包括:
信息获取单元2021,用于获取搅拌机的额定最大负载信息;
梯度划分单元2022,用于根据预设的梯度信息列表和额定最大负载信息确定负载梯度的数量以及各负载梯度的负载信息。
在一些可选实施例中,请参阅图9,本申请提供的搅拌机不掉速控制装置的信息记录模块2030包括:
梯度确认单元2031,用于获取向搅拌机中加入负载时的负载确认信息,其中,负载确认信息包括与搅拌机中的负载对应的负载梯度;
电流记录单元2032,用于记录电机在对应档位的档位斩波方式下运行的电流平均值,并建立电流平均值与对应的负载梯度的映射关系。
在一些可选实施例中,请参阅图10,本申请提供的搅拌机不掉速控制装置的信息记录模块2030还包括:
调整确认单元2033,用于获取电机转速调整的调整确认信息;
斩波调整单元2034,用于根据调整确认信息调整电机的斩波方式以使电机保持对应档位的空载转速不掉速,记录电机的固速斩波方式,并建立固速斩波方式与对应的负载梯度的映射关系。
本发明实施例所提供的装置,其实现原理及产生的技术效果和前述方法实施例相同,为简要描述,装置实施例部分未提及之处,可参考前述方法实施例中相应内容。
实施例七
在一些可选实施例中,本申请还提供一种搅拌机,搅拌机包括如上述的搅拌机不掉速控制装置。
搅拌机设置有处理器,搅拌机启动时,处理器获取搅拌机的启动档位以及该启动档位对应的档位斩波方式,在实施时,搅拌机设置有至少两个档位,每个档位对应的电机转速不同,则各档位的档位斩波方式也不同,档位斩波方式为该档位下默认的用于驱动搅拌机电机工作的固定电压,以搅拌机设置有3个档位为例,包括1档、2档和3档,其中,1档、2档和3档下搅拌机电机的档位斩波方式分别为斩波方式A、斩波方式B和斩波方式C,当搅拌机启动时,例如用户将搅拌机的档位调至2档并启动,处理器即可获取搅拌机的档位为2挡,该档位对应的档位斩波方式为斩波方式B。
处理器系统根据启动档位的档位斩波方式驱动搅拌机的电机转动,还是以上述搅拌机2档启动为例,处理器以斩波方式B驱动搅拌机的电机转动,同时对电机的电流进行采集获取电机的电流信息。
在一些实施例中,电流信息可以是电机在预设时间段内的平均电流信息,然后根据电机的平均电流确定搅拌机的当前负载梯度,在实施时,搅拌机的各档位设置有预设数量的负载梯度,在搅拌机进行使用之前,搅拌机已经设置好了相应的负载梯度,并将各档位的各负载梯度的相关信息保存至处理器,负载梯度的相关设置可以由用户自行设置,或者由搅拌机的生产厂商进行设置,以预设数量为10为例,在各档位下按照10个梯度相搅拌机的杯中加入负载,例如分别加入十个等份的水直至最大容量,处理器记录各负载梯度下电机的电流平均值,以及使电机保持对应档位不掉速的固速斩波方法。在搅拌机使用过程中,处理器根据实时采集到的电机的平均电流确定当前负载梯度。根据该当前负载梯度即可确定固速斩波方式,该固速斩波方式即在当前档位下使电机不掉速的固定的电压,处理器根据该当前负载梯度的固速斩波方式对电机进行调整,从而使得电机不掉速。
在一些实施例中,以上述1档、2档和3档为例,各档位包括3个负载梯度,分别为梯度1、梯度2和梯度3,搅拌机的处理器保持有各档位下各负载梯度的平均电流信息和固速斩波方式,其中,平均电流信息为各负载梯度下搅拌机电机的电流平均值,固速斩波方式为各负载梯度下搅拌机电机不掉速的输出功率值,平均电流信息和固速斩波方式的记录过程如下:
搅拌机启动后,记录各档位的电机转速,1档的电机转速为A,2档的电机转速为B,3档的电机转速为C。
在各档位下按3个梯度向搅拌机的杯中加水,例如梯度1、梯度2和梯度3加水分别为1/3杯、2/3杯和1杯,并在加水过程中记录电机的电流平均值和斩波方式。
在1档下,启动搅拌机并向杯中加入1/3杯水,此时记录电流平均值为I11,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W11,则1档位下梯度1的平均电流信息和固速斩波方式分别为I11和W11。还是在1档下,启动搅拌机并向杯中加入2/3杯水,此时记录电流平均值为I12,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W12,则1档位下梯度2的平均电流信息和固速斩波方式分别为I12和W12。同理,在1档下,启动搅拌机并向杯中加入1杯水,此时记录电流平均值为I13,然后调整搅拌机电机的斩波方式以使电机的转速达到A,此时记录电机的斩波方式为W13,则1档位下梯度3的平均电流信息和固速斩波方式分别为I13和W13。
在2档下,启动搅拌机并向杯中加入1/3杯水,此时记录电流平均值为I21,然后调整搅拌机电机的斩波方式以使电机的转速达到B,此时记录电机的斩波方式为W21,则2档位下梯度1的平均电流信息和固速斩波方式分别为I21和W21。向杯中加入2/3杯水,此时记录电流平均值为I22,然后调整搅拌机电机的斩波方式以使电机的转速达到B,此时记录电机的斩波方式为W22,则2档位下梯度2的平均电流信息和固速斩波方式分别为I22和W22。向杯中加入1杯水,此时记录电流平均值为I23,然后调整搅拌机电机的斩波方式以使电机的转速达到B,此时记录电机的斩波方式为W23,则3档位下梯度3的平均电流信息和固速斩波方式分别为I23和W23。
在3档下,启动搅拌机并向杯中加入1/3杯水,此时记录电流平均值为I31,然后调整搅拌机电机的斩波方式以使电机的转速达到C,此时记录电机的斩波方式为W31,则3档位下梯度1的平均电流信息和固速斩波方式分别为I31和W31。向杯中加入2/3杯水,此时记录电流平均值为I32,然后调整搅拌机电机的斩波方式以使电机的转速达到C,此时记录电机的斩波方式为W32,则3档位下梯度2的平均电流信息和固速斩波方式分别为I32和W32。向杯中加入1杯水,此时记录电流平均值为I33,然后调整搅拌机电机的斩波方式以使电机的转速达到C,此时记录电机的斩波方式为W33,则3档位下梯度3的平均电流信息和固速斩波方式分别为I33和W33。
处理器保存有不同档位下各负载梯度的电流平均值和固速斩波方式,当启动搅拌机时,系统首先按照启动档位的档位斩波方式驱动电机,并采集电机的电流信息,根据该电流信息确定搅拌机当前的当前负载梯度,然后将电机的斩波方式调整为固速斩波方式,使得电机的转速不变。
本申请通过在搅拌机启动时,获取搅拌机的启动档位和与启动档位对应的档位斩波方式,并根据该档位斩波方式驱动搅拌机的电机,同时采集电机的电流信息,由于搅拌机的各档位分成预设数量的负载梯度,且每个负载梯度包括电机没调节前的平均电流信息和电机不掉速的固速斩波方式,通过电机的电流信息即可确定搅拌机当前的当前负载梯度,然后再根据该当前负载梯度的固速斩波方式调整电机的驱动功率,从而使得电机转动不掉速,不需要增加霍尔反馈即可实现电机实时调节不掉速功能,不需要对搅拌机进行硬件改动,降低搅拌机的生产成本。。
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
Claims (10)
1.一种搅拌机不掉速控制方法,其特征在于,所述方法包括:
获取搅拌机的启动信息,其中,所述启动信息包括启动档位以及与所述启动档位对应的固定的档位斩波方式;
根据所述档位斩波方式驱动搅拌机的电机,并采集所述电机的电流信息;
根据所述电流信息确定搅拌机的当前负载梯度,其中,搅拌机包括至少两个档位,各档位包括预设数量的负载梯度,各负载梯度包括对应的平均电流信息和电机不掉速的固定的固速斩波方式;
根据所述当前负载梯度的固速斩波方式调整所述电机的驱动功率。
2.如权利要求1所述的搅拌机不掉速控制方法,其特征在于,所述获取搅拌机的启动信息的步骤之前,包括如下述步骤;
获取搅拌机无负载时各档位下所述电机的空载转速以及所述电机保持所述空载转速不掉速时的所述档位斩波方式;
将各档位划分为所述预设数量的负载梯度;
针对各档位,在向搅拌机中添加与各负载梯度对应的负载时,记录所述电机在对应档位的所述档位斩波方式下的电流平均值,并记录所述电机调整斩波方式后保持所述空载转速不掉速的固定的固速斩波方式。
3.如权利要求2所述的搅拌机不掉速控制方法,其特征在于,所述将各档位划分为所述预设数量的负载梯度的步骤,包括如下述步骤:
获取搅拌机的额定最大负载信息;
根据预设的梯度信息列表和所述额定最大负载信息确定负载梯度的数量以及各负载梯度的负载信息。
4.如权利要求2所述的搅拌机不掉速控制方法,其特征在于,所述记录所述电机在对应档位的所述档位斩波方式下的电流平均值的步骤,包括如下述步骤:
获取向搅拌机中加入负载时的负载确认信息,其中,所述负载确认信息包括与搅拌机中的负载对应的负载梯度;
记录所述电机在对应档位的所述档位斩波方式下运行的电流平均值,并建立所述电流平均值与对应的负载梯度的映射关系。
5.如权利要求4所述的搅拌机不掉速控制方法,其特征在于,所述记录所述电机调整斩波方式后保持所述空载转速不掉速的固定的固速斩波方式的步骤,包括如下述步骤:
获取电机转速调整的调整确认信息;
根据所述调整确认信息调整所述电机的斩波方式以使所述电机保持对应档位的所述空载转速不掉速,记录所述电机的固速斩波方式,并建立所述固速斩波方式与对应的负载梯度的映射关系。
6.一种搅拌机不掉速控制装置,其特征在于,所述装置包括:
信息获取模块,用于获取搅拌机的启动信息,其中,所述启动信息包括启动档位以及与所述启动档位对应的固定的档位斩波方式;
信息采集模块,用于根据所述档位斩波方式驱动搅拌机的电机,并采集所述电机的电流信息;
梯度确定模块,用于根据所述电流信息确定搅拌机的当前负载梯度,其中,搅拌机包括至少两个档位,各档位包括预设数量的负载梯度,各负载梯度包括对应的平均电流信息和电机不掉速的固定的固速斩波方式;
功率调整模块,用于根据所述当前负载梯度的固速斩波方式调整所述电机的驱动功率。
7.如权利要求6所述的搅拌机不掉速控制装置,其特征在于,所述装置还包括:
转速信息获取模块,用于获取搅拌机无负载时各档位下所述电机的空载转速以及所述电机保持所述空载转速不掉速时的所述档位斩波方式;
梯度划分模块,用于将各档位划分为所述预设数量的负载梯度;
信息记录模块,用于在向搅拌机中添加与各负载梯度对应的负载时,记录所述电机在对应档位的所述档位斩波方式下的电流平均值,并记录所述电机调整斩波方式后保持所述空载转速不掉速的固定的固速斩波方式。
8.如权利要求7所述的搅拌机不掉速控制装置,其特征在于,所述梯度划分模块包括:
信息获取单元,用于获取搅拌机的额定最大负载信息;
梯度划分单元,用于根据预设的梯度信息列表和所述额定最大负载信息确定负载梯度的数量以及各负载梯度的负载信息。
9.如权利要求7所述的搅拌机不掉速控制装置,其特征在于,所述信息记录模块包括:
梯度确认单元,用于获取向搅拌机中加入负载时的负载确认信息,其中,所述负载确认信息包括与搅拌机中的负载对应的负载梯度;
电流记录单元,用于记录所述电机在对应档位的所述档位斩波方式下运行的电流平均值,并建立所述电流平均值与对应的负载梯度的映射关系。
10.一种搅拌机,其特征在于,所述搅拌机包括如权利要求6至9中任一项所述的搅拌机不掉速控制装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110242860.6A CN113057504A (zh) | 2021-03-05 | 2021-03-05 | 搅拌机不掉速控制方法、装置及搅拌机 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110242860.6A CN113057504A (zh) | 2021-03-05 | 2021-03-05 | 搅拌机不掉速控制方法、装置及搅拌机 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113057504A true CN113057504A (zh) | 2021-07-02 |
Family
ID=76559708
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110242860.6A Pending CN113057504A (zh) | 2021-03-05 | 2021-03-05 | 搅拌机不掉速控制方法、装置及搅拌机 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113057504A (zh) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113854810A (zh) * | 2021-10-28 | 2021-12-31 | 深圳市商汤科技有限公司 | 烹饪设备、烹饪方法和可读存储介质 |
| CN114740405A (zh) * | 2022-03-10 | 2022-07-12 | 华能铜川照金煤电有限公司 | 一种电机转子绕组匝间短路监测系统及方法 |
| CN117179549A (zh) * | 2023-10-11 | 2023-12-08 | 合肥联宝信息技术有限公司 | 饮水机的控制方法、饮水机、电子设备及存储介质 |
| CN117254745A (zh) * | 2023-11-17 | 2023-12-19 | 深圳市精锐昌科技有限公司 | 一种电机的运行控制方法、系统及存储介质 |
| CN117318573A (zh) * | 2022-06-22 | 2023-12-29 | 杭州九阳小家电有限公司 | 一种食品加工机恒转速控制方法和食品加工机 |
| CN121308635A (zh) * | 2025-12-01 | 2026-01-09 | 佛山市思福特医疗设备有限公司 | 一种用于牙科椅的牙科电马达转速控制方法及系统 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103445696A (zh) * | 2012-05-28 | 2013-12-18 | 松下电器产业株式会社 | 自动制面包机 |
| CN105313360A (zh) * | 2015-11-02 | 2016-02-10 | 余姚市万邦电机有限公司 | 一种慢速压榨机器及其控制方法 |
| CN108448962A (zh) * | 2018-03-09 | 2018-08-24 | 施程峰 | 一种稳定电机转速的反馈驱动方法及系统 |
| CN208524676U (zh) * | 2017-10-13 | 2019-02-22 | 深圳市天祜智能有限公司 | 料理机散热控制装置 |
| CN209172109U (zh) * | 2018-07-04 | 2019-07-30 | 深圳市联创三金电器有限公司 | 多功能食物处理装置 |
| CN110151018A (zh) * | 2018-02-11 | 2019-08-23 | 广东美的生活电器制造有限公司 | 食品处理机及其搅打控制装置及方法 |
-
2021
- 2021-03-05 CN CN202110242860.6A patent/CN113057504A/zh active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103445696A (zh) * | 2012-05-28 | 2013-12-18 | 松下电器产业株式会社 | 自动制面包机 |
| CN105313360A (zh) * | 2015-11-02 | 2016-02-10 | 余姚市万邦电机有限公司 | 一种慢速压榨机器及其控制方法 |
| CN208524676U (zh) * | 2017-10-13 | 2019-02-22 | 深圳市天祜智能有限公司 | 料理机散热控制装置 |
| CN110151018A (zh) * | 2018-02-11 | 2019-08-23 | 广东美的生活电器制造有限公司 | 食品处理机及其搅打控制装置及方法 |
| CN108448962A (zh) * | 2018-03-09 | 2018-08-24 | 施程峰 | 一种稳定电机转速的反馈驱动方法及系统 |
| CN209172109U (zh) * | 2018-07-04 | 2019-07-30 | 深圳市联创三金电器有限公司 | 多功能食物处理装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113854810A (zh) * | 2021-10-28 | 2021-12-31 | 深圳市商汤科技有限公司 | 烹饪设备、烹饪方法和可读存储介质 |
| CN114740405A (zh) * | 2022-03-10 | 2022-07-12 | 华能铜川照金煤电有限公司 | 一种电机转子绕组匝间短路监测系统及方法 |
| CN117318573A (zh) * | 2022-06-22 | 2023-12-29 | 杭州九阳小家电有限公司 | 一种食品加工机恒转速控制方法和食品加工机 |
| CN117179549A (zh) * | 2023-10-11 | 2023-12-08 | 合肥联宝信息技术有限公司 | 饮水机的控制方法、饮水机、电子设备及存储介质 |
| CN117254745A (zh) * | 2023-11-17 | 2023-12-19 | 深圳市精锐昌科技有限公司 | 一种电机的运行控制方法、系统及存储介质 |
| CN117254745B (zh) * | 2023-11-17 | 2024-03-22 | 深圳市精锐昌科技有限公司 | 一种电机的运行控制方法、系统及存储介质 |
| CN121308635A (zh) * | 2025-12-01 | 2026-01-09 | 佛山市思福特医疗设备有限公司 | 一种用于牙科椅的牙科电马达转速控制方法及系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN113057504A (zh) | 搅拌机不掉速控制方法、装置及搅拌机 | |
| US7273315B2 (en) | Mixing device with variable speed drive and related control features | |
| CN209235891U (zh) | 搅拌机 | |
| CA2625561C (en) | Blender with crushed ice functionality | |
| CA1207638A (en) | Food processor | |
| AU2012216404B2 (en) | Kitchen appliance | |
| US20060202070A1 (en) | Ice shaver/blender control apparatus and method | |
| US7882734B2 (en) | Utilizing motor current variations to control mixer operation | |
| CN1208896C (zh) | 电机控制系统的数据接口模块及其应用方法 | |
| JPH09507126A (ja) | アイスクリーム製造装置 | |
| US20130033957A1 (en) | Stirrer having Programmable Stirring Mode Control | |
| US20090109792A1 (en) | Smoothing motor speed during mixing | |
| CN114647194B (zh) | 烹饪装置的控制方法、烹饪装置及计算机可读存储介质 | |
| AU2006200989A1 (en) | Ice Shaver / Blender Control Apparatus And Method | |
| CN114246497B (zh) | 烹饪器具的控制方法、烹饪器具和计算机可读存储介质 | |
| WO2025103149A1 (zh) | 厨房设备的控制方法 | |
| GB2424081A (en) | A blender with sensor feedback control | |
| CN104869877B (zh) | 自动制面包机 | |
| CN111084535B (zh) | 一种食物搅拌机控制方法、装置、存储介质及食物搅拌机 | |
| CN117938009A (zh) | 食品加工机的电机控制方法和食品加工机 | |
| JP2014087388A (ja) | 自動製パン機 | |
| FR3138765A1 (fr) | Machine pour la préparation de sauces instantanées, ensemble, kit et procédé associés | |
| CN117814665A (zh) | 一种食品加工机及和面控制方法 | |
| US4690336A (en) | Apparatus and method for driving raw sausage meat processing cutter | |
| CN117318538A (zh) | 一种食品加工机的控制方法和食品加工机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20210702 |
|
| RJ01 | Rejection of invention patent application after publication |