CN112548475A - 一种机械零部件焊接用智能工装夹具 - Google Patents
一种机械零部件焊接用智能工装夹具 Download PDFInfo
- Publication number
- CN112548475A CN112548475A CN202011403971.2A CN202011403971A CN112548475A CN 112548475 A CN112548475 A CN 112548475A CN 202011403971 A CN202011403971 A CN 202011403971A CN 112548475 A CN112548475 A CN 112548475A
- Authority
- CN
- China
- Prior art keywords
- shaft
- adjusting frame
- seat
- groove
- welding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K37/00—Auxiliary devices or processes, not specially adapted to a procedure covered by only one of the preceding main groups
- B23K37/04—Auxiliary devices or processes, not specially adapted to a procedure covered by only one of the preceding main groups for holding or positioning work
- B23K37/047—Auxiliary devices or processes, not specially adapted to a procedure covered by only one of the preceding main groups for holding or positioning work moving work to adjust its position between soldering, welding or cutting steps
Landscapes
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Butt Welding And Welding Of Specific Article (AREA)
Abstract
本发明公开了一种机械零部件焊接用智能工装夹具,包括升降座、矩形调节框、调节齿轮、承载轴、销轴一、销轴二、槽型座和工装板。本发明中,设置升降座、矩形调节框和贯穿矩形调节框的承载轴,承载轴和矩形调节框为上下转动配合,矩形调节框的顶部通过插销一和升降座上基套的顶部连接,插销一的高度高于承载轴回转轴线的高度,而且承载轴的回转平面和插销一的轴线重合,其中承载轴的另一端连接工装板,出现焊接重心偏斜的情况时,通过控制承载轴旋转来控制重心的升降,并使重心和销轴一的轴线重合,此时重心调整完毕,此时方便以销轴一为转轴稳定旋转。
Description
技术领域
本发明涉及焊接用工装夹具技术领域,尤其涉及一种机械零部件焊接用智能工装夹具。
背景技术
机械领域焊接的部件主要是组合件,组合件通常包括基件和多个附件,基件为基准件,在组合焊接时使用工装夹具固定基准件和附件,固定完毕后进行全面焊接,对于一些全面焊接的结构,需要翻转焊接,由此市面上出现了翻转时焊接工装,但是此类工装局限性大,具体是对于同一类部件的焊接其旋转可以控制平衡,对于在不同的焊接阶段增加附件或者切换不同的焊接部件时其翻转通常不平衡,也就是翻转重心偏离回转轴线的情况,进而翻转焊接不方便;此类工装结构复杂调整操作费时费力,而且操作不便。
因此,本发明提供一种机械零部件焊接用智能工装夹具。
发明内容
本发明的目的在于:为了解决背景技术中提到的问题,而提出的一种机械零部件焊接用智能工装夹具。
为了实现上述目的,本发明采用了如下技术方案:
一种机械零部件焊接用智能工装夹具,包括升降座、矩形调节框、调节齿轮、承载轴、销轴一、销轴二、槽型座和工装板,所述升降座的基套的外表壁通过支撑板连接有固定块,所述固定块位于所述升降座的动作轴的上方,所述矩形调节框位于升降座的一侧且其顶部通过销轴一和固定块可拆卸连接,所述销轴一为水平分布,所述承载轴的外表壁和矩形调节框铰接连接且铰接点的高度低于销轴一,该承载轴的转动平面为竖直面且和销轴一的轴线重合,所述矩形调节框内固定设置有半圆齿圈,该半圆齿圈的轴线和承载轴的回转轴线重合,所述承载轴上开设有和半圆齿圈配合使用的让位孔,所述调节齿轮转动设置在让位孔内且和半圆齿圈外啮合,该调节齿轮的轮轴伸出至外部并固定连接调节电机,所述承载轴一端转动连接有连接轴,该连接轴的一端通过销轴二和槽型座可拆卸连接,所述槽型座为水平分布且底部和动作轴的顶部滑动配合,所述连接轴以销轴二为转轴进入槽型座内后为水平分布。
作为上述技术方案的进一步描述:
所述矩形调节框的顶部固定设置有上连接板,该上连接板贯穿套设有承载套,所述固定块上开设有插孔一,所述销轴一与承载套和插孔一配合使用。
作为上述技术方案的进一步描述:
所述动作轴的顶部固定设置有滑座,所述滑座的顶部开设有和槽型座滑动配合的滑槽,所述槽型座开口朝上且其上两个平行分布的立板上开设有插孔二,所述连接轴的外表壁贯穿开设有插孔三,所述插孔二和插孔三与销轴二配合使用。
作为上述技术方案的进一步描述:
所述矩形调节框的底部固定设置有下连接板,所述下连接板上贯穿旋合有撑轴,所述撑轴的一端和基套的一侧配合使用。
作为上述技术方案的进一步描述:
所述撑轴的另一端固定设置有转把。
作为上述技术方案的进一步描述:
所述槽型座内的两侧壁固定设置有和连接轴配合使用的限位块。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
1、本发明中,设置升降座、矩形调节框和贯穿矩形调节框的承载轴,承载轴和矩形调节框为上下转动配合,矩形调节框的顶部通过插销一和升降座上基套的顶部连接,插销一的高度高于承载轴回转轴线的高度,而且承载轴的回转平面和插销一的轴线重合,其中承载轴的另一端连接工装板,出现焊接重心偏斜的情况时,通过控制承载轴旋转来控制重心的升降,并使重心和销轴一的轴线重合,此时重心调整完毕,此时方便以销轴一为转轴稳定旋转。
2、本发明中,承载轴的一端转动设置连接轴,该连接轴通过插销二和升降座上动作轴的顶部滑动设置的槽型座可拆卸连接,由此当重心调整好后,拆除销轴一,承载轴会被动旋转至水平位,并以销轴二为转轴即可实现工装板平衡稳定翻转,此时工装板及其上的工件可以处于水平位置,方便翻转后焊接。
3、本发明中,矩形调节框的底部固定设置有下连接板,下连接板上贯穿旋合有撑轴,撑轴的一端和基套的一侧配合使用,撑轴的另一端固定设置有转把,可以旋转撑轴使其一端抵压在基套的一侧,由此可以方便将销轴一和销轴二的拆装,进而操作方便,省力。
附图说明
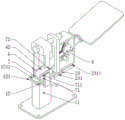
图1为本发明提出的一种机械零部件焊接用智能工装夹具的整体装配的结构示意图;
图2为本发明提出的一种机械零部件焊接用智能工装夹具的图1正视的结构示意图;
图3为本发明提出的一种机械零部件焊接用智能工装夹具的图1中矩形调节框、销轴一和基套连接的结构示意图;
图4为本发明提出的一种机械零部件焊接用智能工装夹具的图1中矩形调节框、调节齿轮、调节电机和承载轴连接的结构示意图;
图5为本发明提出的一种机械零部件焊接用智能工装夹具的图1中承载轴、销轴二、槽型座和矩形调节框配合的结构示意图。
图例说明:
1、升降座;11、基套;111、支撑板;1111、固定块;11111、插孔一;12、动作轴;121、滑座;1211、滑槽;2、矩形调节框;21、半圆齿圈;22、上连接板;221、承载套;23、下连接板;231、撑轴;2311、转把;3、调节齿轮;31、轮轴;4、承载轴;41、让位孔;42、连接轴;5、销轴一;6、销轴二;7、槽型座;71、立板;711、插孔二;72、限位块;8、工装板;9、调节电机。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
实施例1
请参阅图1-5,一种机械零部件焊接用智能工装夹具,包括升降座1、矩形调节框2、调节齿轮3、承载轴4、销轴一5、销轴二6、槽型座7和工装板8,工装板8用来定位工件,其他部件用于对工装板8以及其携带的工件的旋转重心调整,使得工件可以自由翻转,升降座1的基套11的外表壁通过支撑板111连接有固定块1111,固定块1111位于升降座1的动作轴12的上方,矩形调节框2位于升降座1的一侧且其顶部通过销轴一5和固定块1111可拆卸连接,也就是说拔掉销轴一5后可以将整个矩形调节框2分离固定块1111,销轴一5为水平分布,销轴一5作为初级调平阶段的回转轴,具体的是矩形调节框2的顶部固定设置有上连接板22,该上连接板22贯穿套设有承载套221,固定块1111上开设有插孔一11111,销轴一5与承载套221和插孔一11111配合使用;承载轴4的外表壁和矩形调节框2铰接连接且铰接点的高度低于销轴一5,该承载轴4的转动平面为竖直面且和销轴一5的轴线重合,在调整初期可以使得承载轴4为水平分布,承载轴4的另一端连接工装板8的一端,此时矩形调节框2以及其内的部件、工装板8和其上的工件构成的重心位于销轴一5的轴线的下方;矩形调节框2内固定设置有半圆齿圈21,该半圆齿圈21的轴线和承载轴4的回转轴线重合,承载轴4上开设有和半圆齿圈21配合使用的让位孔41,调节齿轮3转动设置在让位孔41内且和半圆齿圈21外啮合,该调节齿轮3的轮轴31伸出至外部并固定连接调节电机9,由此通过控制调节齿轮3旋转可以带动承载轴4绕铰接点转动,控制工装板8上升并处于倾斜位置,此时上述重心的高度上升并位于或者近似位于销轴一5的轴线上,此时可以轻易翻转工装板8,便于工件正反面转换,但是此时的工装板8处于倾斜位置,因此不方便焊接;在承载轴4一端转动连接有连接轴42,此时的连接轴42和承载轴4同轴心分布,该连接轴42的一端通过销轴二6和槽型座7可拆卸连接,上述在重心初期调整阶段,承载轴4处于倾斜位置,此时连接轴42同样处于倾斜位置,槽型座7为水平分布且底部和动作轴12的顶部滑动配合,具体的是动作轴12的顶部固定设置有滑座121,滑座121的顶部开设有和槽型座7滑动配合的滑槽1211,槽型座7开口朝上且其上两个平行分布的立板71上开设有插孔二711,连接轴42的外表壁贯穿开设有插孔三,插孔二711和插孔三与销轴二6配合使用,连接轴42以销轴二6为转轴进入槽型座7内后为水平分布,由此控制升降座1升降,使得槽型座7的高度方便通过销轴二6和连接轴42上的插孔三连接,升降座1可以选用液压油缸式升降机构,当槽型座7和连接轴42连接后,可以手动抬升工装板8,并将销轴一5取下,然后下方工装板8,槽型座7内的两侧壁固定设置有和连接轴42配合使用的限位块72,进而连接轴42会进入两个限位块72之间并处于水平分布,由于上述调整好的重心同样在连接轴42的轴线上,因此,以连接轴42为转轴即可旋转工装板8,工装板8不会倾斜,进而方便调整后双面焊接,整体具有智能调整功能,调整快捷。
实施例2
请参阅图5,由于在实施例1中涉及到对工装板8的上提动作,为了进一步方便操作,本实施例和和实施例1的区别为矩形调节框2的底部固定设置有下连接板23,下连接板23上贯穿旋合有撑轴231,撑轴231的一端和基套11的一侧配合使用,撑轴231的另一端固定设置有转把2311,可以旋转撑轴231使其一端抵压在基套11的一侧,由此可以方便将销轴一5和销轴二6的拆装,进而操作方便,省力。
工作原理:使用时,将升降座1固定在地面上,将调节电机9电性连接外部的控制电箱,并由控制电箱提供电能,将待焊接的工件通夹紧装置固定在工装板8上,此时工装板8、工件、工装板8上的附件、整个矩形调节框2和整个矩形调节框2内的部件形成的重心位于销轴一5的轴线的下方,控制调节电机9旋转并带动调节齿轮3旋转,然后在半圆齿圈21的作用下承载轴4转动,工装板8上升,重心同样上升,在此过冲中,销轴二6处于取下的状态,通过判断矩形调节框2以销轴一5为转轴摆动的阻力大小来判断调整的程度,调整完毕后,重心会在销轴一5的轴线上,此时,控制升降座1上的动作轴12上升,然后滑动槽型座7以方便将销轴二6连接槽型座7和连接轴42,然后旋转撑轴231使其一端抵压在基套11的侧壁上,拔出销轴一5,反向旋转撑轴231,此时,连接轴42以销轴二为转轴转动至水平位置,进而可以保持承载轴4处于水平状态,方便工装板8正反面焊接操作。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
Claims (6)
1.一种机械零部件焊接用智能工装夹具,其特征在于,包括升降座(1)、矩形调节框(2)、调节齿轮(3)、承载轴(4)、销轴一(5)、销轴二(6)、槽型座(7)和工装板(8),所述升降座(1)的基套(11)的外表壁通过支撑板(111)连接有固定块(1111),所述固定块(1111)位于所述升降座(1)的动作轴(12)的上方,所述矩形调节框(2)位于升降座(1)的一侧且其顶部通过销轴一(5)和固定块(1111)可拆卸连接,所述销轴一(5)为水平分布,所述承载轴(4)的外表壁和矩形调节框(2)铰接连接且铰接点的高度低于销轴一(5),该承载轴(4)的转动平面为竖直面且和销轴一(5)的轴线重合,所述矩形调节框(2)内固定设置有半圆齿圈(21),该半圆齿圈(21)的轴线和承载轴(4)的回转轴线重合,所述承载轴(4)上开设有和半圆齿圈(21)配合使用的让位孔(41),所述调节齿轮(3)转动设置在让位孔(41)内且和半圆齿圈(21)外啮合,该调节齿轮(3)的轮轴(31)伸出至外部并固定连接调节电机(9),所述承载轴(4)一端转动连接有连接轴(42),该连接轴(42)的一端通过销轴二(6)和槽型座(7)可拆卸连接,所述槽型座(7)为水平分布且底部和动作轴(12)的顶部滑动配合,所述连接轴(42)以销轴二(6)为转轴进入槽型座(7)内后为水平分布。
2.根据权利要求1所述的一种机械零部件焊接用智能工装夹具,其特征在于,所述矩形调节框(2)的顶部固定设置有上连接板(22),该上连接板(22)贯穿套设有承载套(221),所述固定块(1111)上开设有插孔一(11111),所述销轴一(5)与承载套(221)和插孔一(11111)配合使用。
3.根据权利要求1所述的一种机械零部件焊接用智能工装夹具,其特征在于,所述动作轴(12)的顶部固定设置有滑座(121),所述滑座(121)的顶部开设有和槽型座(7)滑动配合的滑槽(1211),所述槽型座(7)开口朝上且其上两个平行分布的立板(71)上开设有插孔二(711),所述连接轴(42)的外表壁贯穿开设有插孔三,所述插孔二(711)和插孔三与销轴二(6)配合使用。
4.根据权利要求1所述的一种机械零部件焊接用智能工装夹具,其特征在于,所述矩形调节框(2)的底部固定设置有下连接板(23),所述下连接板(23)上贯穿旋合有撑轴(231),所述撑轴(231)的一端和基套(11)的一侧配合使用。
5.根据权利要求4所述的一种机械零部件焊接用智能工装夹具,其特征在于,所述撑轴(231)的另一端固定设置有转把(2311)。
6.根据权利要求1所述的一种机械零部件焊接用智能工装夹具,其特征在于,所述槽型座(7)内的两侧壁固定设置有和连接轴(42)配合使用的限位块(72)。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011403971.2A CN112548475A (zh) | 2020-12-03 | 2020-12-03 | 一种机械零部件焊接用智能工装夹具 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202011403971.2A CN112548475A (zh) | 2020-12-03 | 2020-12-03 | 一种机械零部件焊接用智能工装夹具 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112548475A true CN112548475A (zh) | 2021-03-26 |
Family
ID=75048440
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202011403971.2A Withdrawn CN112548475A (zh) | 2020-12-03 | 2020-12-03 | 一种机械零部件焊接用智能工装夹具 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN112548475A (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113042993A (zh) * | 2021-03-29 | 2021-06-29 | 浙江大邦电动工具有限公司 | 一种割草机的装配生产设备 |
| CN115673662A (zh) * | 2022-10-21 | 2023-02-03 | 山东东宏管业股份有限公司 | 一种虾米腰弯头管件焊接装置及焊接系统 |
-
2020
- 2020-12-03 CN CN202011403971.2A patent/CN112548475A/zh not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113042993A (zh) * | 2021-03-29 | 2021-06-29 | 浙江大邦电动工具有限公司 | 一种割草机的装配生产设备 |
| CN115673662A (zh) * | 2022-10-21 | 2023-02-03 | 山东东宏管业股份有限公司 | 一种虾米腰弯头管件焊接装置及焊接系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112548475A (zh) | 一种机械零部件焊接用智能工装夹具 | |
| CN211056107U (zh) | 一种自动翻转设备 | |
| CN109590791B (zh) | 一种重型偏心轴类定位翻转装置 | |
| CN111002245A (zh) | 一种镀锌钢板加工用夹紧定位工装及定位方法 | |
| CN116833456B (zh) | 一种电池托盘全自动双面铣削去毛刺装置 | |
| CN112593712A (zh) | 一种装配式集成墙板安装用支撑装置 | |
| CN215294351U (zh) | 一种信息技术咨询器的调节装置 | |
| CN214162206U (zh) | 一种多用轮辐铣缺口夹具 | |
| CN210152956U (zh) | 风扇摆头角度控制旋转底盘 | |
| CN215118091U (zh) | 一种环境艺术设计展示装置 | |
| CN220974202U (zh) | 一种装修用搬运设备 | |
| CN217943288U (zh) | 一种带有升降调整的设备维修桌 | |
| CN213518873U (zh) | 一种光学试验用平台 | |
| CN221539687U (zh) | 一种航空发动机用维修台架 | |
| CN215583463U (zh) | 一种技术咨询用可移动的工作台 | |
| CN214295375U (zh) | 一种便于调节角度的画架 | |
| CN218236895U (zh) | 一种移动式智能安防管理监控装置 | |
| CN215615567U (zh) | 一种竖管生产用方便调节的磨齿机 | |
| CN215126245U (zh) | 便携式环境设计工作架 | |
| CN217335323U (zh) | 一种方便组合式连接的减速电机 | |
| CN221953267U (zh) | 电液转向器性能测试台 | |
| CN221714636U (zh) | 一种门窗型材喷涂装置的吊挂结构 | |
| CN215369819U (zh) | 便携式动液面检测装置 | |
| CN214030577U (zh) | 一种新型四向平台 | |
| CN218224195U (zh) | 一种便于调节的冲压件支撑台 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WW01 | Invention patent application withdrawn after publication |
Application publication date: 20210326 |
|
| WW01 | Invention patent application withdrawn after publication |