CN111699240A - 用于细胞培养缩放的系统和方法 - Google Patents
用于细胞培养缩放的系统和方法 Download PDFInfo
- Publication number
- CN111699240A CN111699240A CN201980009086.5A CN201980009086A CN111699240A CN 111699240 A CN111699240 A CN 111699240A CN 201980009086 A CN201980009086 A CN 201980009086A CN 111699240 A CN111699240 A CN 111699240A
- Authority
- CN
- China
- Prior art keywords
- diameter
- impeller
- bioprocessing
- container
- bioreactor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



























Classifications
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M35/00—Means for application of stress for stimulating the growth of microorganisms or the generation of fermentation or metabolic products; Means for electroporation or cell fusion
- C12M35/04—Mechanical means, e.g. sonic waves, stretching forces, pressure or shear stimuli
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M23/00—Constructional details, e.g. recesses, hinges
- C12M23/58—Reaction vessels connected in series or in parallel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F23/00—Mixing according to the phases to be mixed, e.g. dispersing or emulsifying
- B01F23/20—Mixing gases with liquids
- B01F23/23—Mixing gases with liquids by introducing gases into liquid media, e.g. for producing aerated liquids
- B01F23/233—Mixing gases with liquids by introducing gases into liquid media, e.g. for producing aerated liquids using driven stirrers with completely immersed stirring elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/05—Stirrers
- B01F27/051—Stirrers characterised by their elements, materials or mechanical properties
- B01F27/054—Deformable stirrers, e.g. deformed by a centrifugal force applied during operation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/05—Stirrers
- B01F27/11—Stirrers characterised by the configuration of the stirrers
- B01F27/114—Helically shaped stirrers, i.e. stirrers comprising a helically shaped band or helically shaped band sections
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/21—Mixers with rotary stirring devices in fixed receptacles; Kneaders characterised by their rotating shafts
- B01F27/213—Mixers with rotary stirring devices in fixed receptacles; Kneaders characterised by their rotating shafts characterised by the connection with the drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/80—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis
- B01F27/92—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis with helices or screws
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/30—Driving arrangements; Transmissions; Couplings; Brakes
- B01F35/32—Driving arrangements
- B01F35/32005—Type of drive
- B01F35/3204—Motor driven, i.e. by means of an electric or IC motor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/40—Mounting or supporting mixing devices or receptacles; Clamping or holding arrangements therefor
- B01F35/41—Mounting or supporting stirrer shafts or stirrer units on receptacles
- B01F35/412—Mounting or supporting stirrer shafts or stirrer units on receptacles by supporting both extremities of the shaft
- B01F35/4121—Mounting or supporting stirrer shafts or stirrer units on receptacles by supporting both extremities of the shaft at the top and at the bottom of the receptacle, e.g. for performing a conical orbital movement about a vertical axis
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/40—Mounting or supporting mixing devices or receptacles; Clamping or holding arrangements therefor
- B01F35/43—Supporting receptacles on frames or stands
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/50—Mixing receptacles
- B01F35/513—Flexible receptacles, e.g. bags supported by rigid containers
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M23/00—Constructional details, e.g. recesses, hinges
- C12M23/50—Means for positioning or orientating the apparatus
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M27/00—Means for mixing, agitating or circulating fluids in the vessel
- C12M27/02—Stirrer or mobile mixing elements
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M27/00—Means for mixing, agitating or circulating fluids in the vessel
- C12M27/02—Stirrer or mobile mixing elements
- C12M27/06—Stirrer or mobile mixing elements with horizontal or inclined stirrer shaft or axis
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12M—APPARATUS FOR ENZYMOLOGY OR MICROBIOLOGY; APPARATUS FOR CULTURING MICROORGANISMS FOR PRODUCING BIOMASS, FOR GROWING CELLS OR FOR OBTAINING FERMENTATION OR METABOLIC PRODUCTS, i.e. BIOREACTORS OR FERMENTERS
- C12M41/00—Means for regulation, monitoring, measurement or control, e.g. flow regulation
- C12M41/48—Automatic or computerized control
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12N—MICROORGANISMS OR ENZYMES; COMPOSITIONS THEREOF; PROPAGATING, PRESERVING, OR MAINTAINING MICROORGANISMS; MUTATION OR GENETIC ENGINEERING; CULTURE MEDIA
- C12N5/00—Undifferentiated human, animal or plant cells, e.g. cell lines; Tissues; Cultivation or maintenance thereof; Culture media therefor
- C12N5/06—Animal cells or tissues; Human cells or tissues
- C12N5/0602—Vertebrate cells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/30—Driving arrangements; Transmissions; Couplings; Brakes
- B01F2035/35—Use of other general mechanical engineering elements in mixing devices
- B01F2035/352—Bearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F2101/00—Mixing characterised by the nature of the mixed materials or by the application field
- B01F2101/44—Mixing of ingredients for microbiology, enzymology, in vitro culture or genetic manipulation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F23/00—Mixing according to the phases to be mixed, e.g. dispersing or emulsifying
- B01F23/20—Mixing gases with liquids
- B01F23/23—Mixing gases with liquids by introducing gases into liquid media, e.g. for producing aerated liquids
- B01F23/233—Mixing gases with liquids by introducing gases into liquid media, e.g. for producing aerated liquids using driven stirrers with completely immersed stirring elements
- B01F23/2336—Mixing gases with liquids by introducing gases into liquid media, e.g. for producing aerated liquids using driven stirrers with completely immersed stirring elements characterised by the location of the place of introduction of the gas relative to the stirrer
- B01F23/23362—Mixing gases with liquids by introducing gases into liquid media, e.g. for producing aerated liquids using driven stirrers with completely immersed stirring elements characterised by the location of the place of introduction of the gas relative to the stirrer the gas being introduced under the stirrer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F27/00—Mixers with rotary stirring devices in fixed receptacles; Kneaders
- B01F27/80—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis
- B01F27/90—Mixers with rotary stirring devices in fixed receptacles; Kneaders with stirrers rotating about a substantially vertical axis with paddles or arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B01—PHYSICAL OR CHEMICAL PROCESSES OR APPARATUS IN GENERAL
- B01F—MIXING, e.g. DISSOLVING, EMULSIFYING OR DISPERSING
- B01F35/00—Accessories for mixers; Auxiliary operations or auxiliary devices; Parts or details of general application
- B01F35/30—Driving arrangements; Transmissions; Couplings; Brakes
- B01F35/32—Driving arrangements
- B01F35/321—Disposition of the drive
- B01F35/3214—Disposition of the drive at the upper side of the axis, e.g. driving the stirrer from the top of a receptacle
-
- C—CHEMISTRY; METALLURGY
- C12—BIOCHEMISTRY; BEER; SPIRITS; WINE; VINEGAR; MICROBIOLOGY; ENZYMOLOGY; MUTATION OR GENETIC ENGINEERING
- C12N—MICROORGANISMS OR ENZYMES; COMPOSITIONS THEREOF; PROPAGATING, PRESERVING, OR MAINTAINING MICROORGANISMS; MUTATION OR GENETIC ENGINEERING; CULTURE MEDIA
- C12N2527/00—Culture process characterised by the use of mechanical forces, e.g. strain, vibration
Landscapes
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Organic Chemistry (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Wood Science & Technology (AREA)
- Zoology (AREA)
- Biomedical Technology (AREA)
- Biotechnology (AREA)
- Genetics & Genomics (AREA)
- Biochemistry (AREA)
- General Engineering & Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Microbiology (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Sustainable Development (AREA)
- Clinical Laboratory Science (AREA)
- Cell Biology (AREA)
- Analytical Chemistry (AREA)
- Mechanical Engineering (AREA)
- Computer Hardware Design (AREA)
- Apparatus Associated With Microorganisms And Enzymes (AREA)
- Mixers Of The Rotary Stirring Type (AREA)
- Accessories For Mixers (AREA)
- Micro-Organisms Or Cultivation Processes Thereof (AREA)
Abstract
本发明实施例集合涉及一种用于产生可缩放生物反应器系统的生物生产系统、方法和装置。具体来说,本发明实施例集合使得能够通过小测试规模的生物反应的操作参数与商业规模的生物反应的操作参数之间的匹配来确定商业规模的生物反应性能特性。所述系统和方法不仅仅依赖于使跨规模的生物反应器装置在尺寸上相同,因为这并没有考虑非常小与非常大的体积之间在流体动力学属性上的差异,而是需要彼此结合来调试各种系统(混合总成、鼓泡器系统和顶部空间气流系统)以实现预期结果。
Description
相关申请的交叉引用
本申请要求2018年7月31日提交的美国临时申请第62/712,343号、2018年5月14日提交的美国临时申请第62/670,934号和2018年1月17日提交的美国临时申请第62/618,215号的优先权,所述申请都通过特定引用并入本文中。
背景技术
生物医药业将宽范围的混合系统用于多种过程,如用于培养基和缓冲液的制备中和用于细胞和微生物的生长、混合和悬浮中。包含生物反应器和发酵罐的一些常规混合系统包括安置在刚性支撑壳体内的柔性袋。叶轮安置在柔性袋内且与驱动轴联接。驱动轴和叶轮的旋转促进了柔性袋内所含的流体的混合和/或悬浮。
科学家和工程师致力于产生搅拌釜式反应器,所述搅拌釜式反应器不仅可以为细胞培养生长提供无菌和良好受控的环境,而且还可以提供从研究到制造规模的稳固的按比例放大解决方案。已基于线性几何缩放方法将传统上优良的工程改造原理以此方式应用于设计反应器(即,容器将具有类似高度/直径比率以及类似叶轮/槽直径比率)。这种方法在许多情况下效果很好,但是操作者通常必须做出许多复杂的决定,如同如何最好地选择操作设置以通过按比例放大获得可重复的结果。由于其是二相且以代谢为基础的系统,因此大部分操作参数动态地相互作用且通常非线性响应;最优参数选择和过程结果通常过于不可预测、昂贵且费时以无法在操作者水平下正确地解决。
生物制药制造领域的技术人员认识到具有良好的按比例放大和按比例缩小模型的重要性,所述模型能够模拟或理想地复制大规模生物反应器中发现的生理生长条件。按比例缩小模型的重要性的原因通常与对快速筛检多个参数(优化细胞克隆、培养基、关键操作参数或产品质量)的需求有关,且能够在良好受控条件下以较低成本以及更少劳动力进行宽范围的实验是有益的。良好的按比例缩小模型也将去除所需过程的风险,在所述过程中,大规模出现问题的可能性将极低,所述问题先前在小规模出现时未识别出。
因为较大生物反应器是两相系统(基于气体和液体的系统),很大程度上由于气体类型的溶解度差异且因为系统的流体机制和/或物理性由于跨规模受影响的黏度、剪切力、密度和表面相互作用而是极动态的(非线性),因此难以以可预测方式按比例缩小所述系统,。虽然使用传统生物反应器设计的总功率耗散率可能类似,但在所有规模上,所得总流和测得的混合时间很少类似。因此,通常会在大规模下出现在小规模系统中未被视为问题的问题,这是因为大规模下发现的相同pH、养分、气体浓度或剪切力梯度不容易在小规模生物反应器中产生的单一操作状态下被复制。
当前采用的主要设计方法是系统的几何比例缩放(槽高度与直径比和叶轮与直径比);这结合个1)接近恒定的叶轮尖端速度或2)接近恒定的P/V(功率输入/体积)进行操作。这些方法之所以相当成功是因为其允许操作者在充气时补偿基于旋转搅拌器的系统中动力学和质量传递的非线性中的一些。然而,剪切力传统上基于叶轮的尖端速度(其中尖端速度是叶轮直径的平方的函数)来确定基准。更常采用功率输入/体积,这是因为其有利于满足实际机械设计按比例放大的限制(意味着功率要求在跨规模的合理量值内),因为功率传递是速度和直径(以及部分叶轮几何形状)的非线性函数。
一旦知道了反应器的大体设计,习惯做法是关注两个关键过程参数中的一个。选择第1层目标常数——对剪切力敏感的培养物通常使用叶轮尖端速度,而对剪切力更耐受的培养物通常使用输入功率/体积(P/V)。无论选择的规模参数如何,混合效率都非常重要,最优做法是验证可跨规模实现类似或至少合理的掺合时间(最期望的是<30秒的T90混合时间,但由于基于水的流体所固有的总流体混合耗散问题,通常无法跨规模实现)。随后,第二层目标通常与pH控制和溶解气体相关——氧气的质量传递kLa(主要)和二氧化碳的kLa(次要)。通过使用计算流体力学(CFD)进一步优化一些系统。这是用于确定叶轮功率数(Np)以及用于对系统中的流体流型进行建模的好方法。可以估计功率传递,并将其用于预测传递到系统中的(混合)功率量。计算或混合式模型(RPT)也可以预测流场方向、速度和局部剪切力条件。
如果系统设计正确,那么熟悉的操作者通常会非常成功地实现可接受的结果,但是总体过程仍然常常受未知事件和费时的故障排除工作困扰,尤其是在必须在不同系统之间促进过程传递作为按比例增大的一部分或传递到另一个位置时。
通常被忽略的问题是系统的总流体流以及其如何跨规模改变。流体是位移且速度并非是跨规模线性的,因此液体移动的混合曲线将不仅基于体积、尖端速度和直径而改变。所述混合曲线还取决于反应器内的功率的空间分布。实际上,设计应使较小体积系统的局部混合性能失调,以匹配大规模系统的总混合和质量传递性能。因为混合或容器翻转的一些随机性是有益的,所以良好的设计应考虑到设计中的阻挡或扰流器的影响。
发明内容
在一个方面,公开了一种用于从测试过渡到商业生产的可缩放生物反应器系统。系统可包含:第一生物反应器,其包括第一生物处理容器和第一可配置混合总成以及第一叶轮,所述第一生物处理容器具有第一端、第二端和侧壁,所述第一可配置混合总成悬挂在第一生物处理容器的第一端与第二端之间,所述第一叶轮具有第一直径,第一叶轮在第一位置附接到第一可配置混合总成,其中选择第一直径和第一位置以实现操作参数集;和第二生物反应器,其包括第二生物处理容器和第二可配置混合总成以及第二叶轮,所述第二生物处理容器具有第一端、第二端和侧壁,其中第二生物处理容器与第一生物处理容器的体积不同,所述第二可配置混合总成悬挂在第二生物处理容器的第一端与第二端之间,所述第二叶轮具有与第一直径不同的第二直径,第二叶轮在第二位置附接到第二可配置混合总成,其中选择第二直径和第二位置以匹配操作参数集,且操作参数包含每体积功率和叶轮尖端速度。在一些实施例中,第一生物处理容器包含第一鼓泡器,其附连到第一生物处理容器的第一端且具有第一数目的孔,并且每个孔具有第一直径,并且第二生物处理容器包含第二鼓泡器,其附连到第二生物处理容器的第一端且具有第二数目的孔,并且每个孔具有第二直径。在一些实施例中,第一数目的孔与第二数目的孔不同,第一直径与第二直径不同,且选择孔数目和孔大小使得第一和第二生物反应器达到相同的kLa。在一些实施例中,选择第一和第二位置以重新夹带从第一和第二鼓泡器上升的气泡。在一些实施例中,第一生物反应器包含第一顶部空间气流器件,且第二生物反应器包含第二顶部空间气流器件,并且每个横流鼓泡器操作以跨顶部空间提供不同的气流速率以在第一生物反应器与第二生物反应器之间将液相的CO2去除率匹配到百分之五内。在一些实施例中,第二生物反应器包含第三叶轮,其具有与第一直径不同的第三直径,其中第三叶轮附接到第二可配置混合总成,并且选择第三直径和第三附接位置以及第二直径和第二位置以匹配操作参数集。在一些实施例中,第一叶轮直径与第一生物处理容器宽度的比率与第二叶轮直径与第二生物处理容器宽度的比率不同。在一些实施例中,操作参数集进一步包含总流体流和T95混合时间。在一些实施例中,基于细胞的最优生长条件选择操作参数集。在一些实施例中,细胞是真核的且对随叶轮尖端速度增大而增大的剪切力敏感。在一些实施例中,第一生物处理容器是在0.1升与50升之间的工作台规模体积,且第二生物处理容器是在50升与10,000升之间的商业体积。在一些实施例中,第一和第二生物处理容器的形状为矩形,且第一和第二可配置混合总成偏离中心轴线以增大总流体流。在一些实施例中,第一和第二生物处理容器的高宽比大于1.5。在一些实施例中,第一生物处理容器具有在1.5与2之间的高宽比,且第二生物处理容器具有在1.75与4之间的高宽比。
在一个方面,公开了一种在具有不同体积的生物反应器之间匹配流体混合特性的方法。方法可包含选择具有操作参数集的第一生物反应器,第一生物反应器包括:第一生物处理容器,其具有第一端、第二端和侧壁;和第一可配置混合总成,其悬挂在第一生物处理容器的第一端与第二端之间。方法可包含选择具有第一直径的第一叶轮且将第一叶轮附接到可配置混合总成,其中选择第一直径和附接位置以符合操作参数。方法可包含选择第二生物反应器,其包括:第二生物处理容器,其具有第一端、第二端和侧壁,其中第二生物处理容器与第一生物处理容器的体积不同;和第二可配置混合总成,其悬挂在第二生物处理容器的第一端与第二端之间。方法可包含选择具有与第一直径不同的第二直径的第二叶轮,并且将第二叶轮附接到第二可配置混合总成,其中选择第二直径和第二附接位置以匹配操作参数集,其中操作参数集包含每体积功率和叶轮尖端速度。方法可包含选择具有与第一直径不同的第三直径的第三叶轮并将第三叶轮附接到第二可配置混合总成的步骤,其中选择第三直径和第三附接位置以及第二直径和第二附接位置以匹配操作参数集。在一些实施例中,添加第三叶轮的步骤降低了保持第一和第二生物反应器中的每体积功率和叶轮尖端速度所需的第二和第三叶轮尖端速度。在一些实施例中,第一叶轮直径与第一生物处理容器宽度的比率与第二叶轮直径与第二生物处理容器宽度的比率不同。在一些实施例中,操作参数集进一步包含总流体流和T95混合时间。在一些实施例中,基于细胞的最优生长条件来选择操作参数集。在一些实施例中,细胞是真核的并且对随叶轮尖端速度增大而增大的剪切力敏感。在一些实施例中,第一生物处理容器是在0.1升与50升之间的工作台规模体积,且第二生物处理容器是在50升与10,000升之间的商业体积。在一些实施例中,第一和第二生物处理容器的形状为矩形,且第一和第二可配置混合总成偏离中心轴线以增大总流体流。在一些实施例中,第一和第二生物处理容器的高宽比大于1.5。
在一个方面,公开了一种在具有不同体积的生物反应器之间匹配流体混合特性的方法。方法可包含选择具有操作参数的第一生物反应器,第一生物反应器包括第一生物处理容器,其具有第一端、第二端和侧壁;和第一可配置混合总成,其悬挂在第一生物处理容器的第一端与第二端之间。方法可包含选择具有第一数目的孔的第一鼓泡器的步骤,其中孔具有第一直径,其中选择第一数目和第一直径以符合操作参数,其中将第一鼓泡器附连到第一端。方法可包含选择第二生物反应器的步骤,所述第二生物反应器包括:第二生物处理容器,其具有第一端、第二端和侧壁,其中第二生物处理容器的高宽比与第一生物处理容器的高宽比不同;和第二可配置混合总成,其悬挂在第二生物处理容器的第一端与第二端之间。方法可包含选择具有第二数目的孔的第二鼓泡器的步骤,其中孔具有第二直径且将第二鼓泡器附连到第二生物处理容器的第一端,其中第二数目的孔与第一数目的孔不同且第二直径与第一直径不同,其中选择第二数目的孔和第二直径以将操作参数匹配在百分之五内,其中操作参数是kLa。在一些实施例中,第一生物反应器包含第一顶部空间气流器件,且第二生物反应器包含第二顶部空间气流器件,并且每个顶部空间气流器件操作以跨顶部空间提供不同气流速率以匹配操作参数。方法可包含将第二叶轮附接到第二混合总成的步骤,其中第二叶轮配置成重新夹带从第二鼓泡器上升的气泡,其中选择鼓泡器和第二叶轮的位置以及第二数目和第二孔径以匹配操作参数。在一些实施例中,第一生物处理容器的高宽比在1.5与2之间,且第二生物处理容器的高宽比在1.75与4之间。在一些实施例中,第一生物处理容器是在0.1升与50升之间的工作台体积,且第二生物处理容器是在50升与10,000升之间的商业体积。在一些实施例中,第一和第二生物处理容器的形状为矩形,并且第一和第二混合总成偏离中心轴线以实现所期望的kLa。
附图说明
为了容易地识别对任何特定元件或动作的论述,附图标记中的一或多个最重要数字是指首次引入所述元件的附图编号。
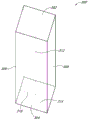
图1示出了根据一个实施例的混合系统100。
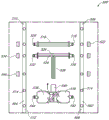
图2示出了根据一个实施例的混合系统200。
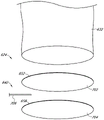
图3示出了根据一个实施例的柔性隔室300。
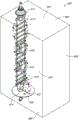
图4示出了根据一个实施例的包含柔性隔室402和螺旋总成426的混合系统400。
图5示出了根据一个实施例的螺旋总成500的分解图。
图6示出了根据一个实施例的包含柔性容器604和鼓泡器的混合系统600。
图7示出了根据一个实施例的鼓泡器700设计。
图8示出了根据一个实施例的鼓泡器800。
图9示出了根据一个实施例的包含柔性隔室902和偏移驱动轴910的混合系统900。
图10示出了根据一个实施例的混合系统1000,其包含具有偏移且成角度的驱动轴910的柔性隔室902。
图11示出了根据一个实施例的包含气体递送系统的混合系统1100。
图12示出了根据一个实施例的气体递送系统1200。
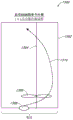
图13示出了根据单个叶轮实施例的展示了气泡轨迹的混合系统1300。
图14示出了具有次优放置的鼓泡器的展示了气泡轨迹的混合系统1400。
图15示出了具有次优放置的第二叶轮的展示了气泡轨迹的混合系统1500。
图16示出了具有最优放置的鼓泡器和叶轮组的展示了气泡轨迹的混合系统1600。
图17示出了根据一个实施例的鼓泡器布局1700。
图18A到F示出了根据一个实施例的使用不同鼓泡器位置的气体分布模式。
图19示出了根据一个实施例的来自产生于各种鼓泡器位置的气体的气泡停留时间1900。
图20示出了根据一个实施例的使用各种鼓泡器位置的kLa趋势2000。
图21示出了根据各种实施例的鼓泡器性能2100。
图22示出了跨体积规模的混合一致性2200。
图23示出了根据一个实施例的匹配操作参数图2300。
图24示出了在具有不同体积的生物反应器之间匹配流体混合特性的方法。
图25示出了在具有不同体积的生物反应器之间匹配流体混合特性的方法。
图26示出了具有不同体积的传统生物反应器之间的Kscore比较。
图27示出了跨规模的kLa比较数据。
图28示出了本文中所描述的系统中的规模之间的预计Kscore。
具体实施方式
描述
在随附的描述和附图中描述了用于生物反应器缩放的系统、方法和装置的实施例。在附图中,阐述了大量具体细节以提供对某些实施例的透彻理解。技术人员将能够了解,本文中所述的可缩放生物反应器系统和方法可用于多种应用,包含但不限于将细胞培养产物从实验室或工作台规模引入商业规模生产。另外,技术人员将了解,可以在没有这些具体细节的情况下实践某些实施例。此外,所属领域的技术人员将易于了解,呈现和进行方法的具体顺序是说明性的,并且预期所述顺序可以变化且仍保持在某些实施例的精神和范围内。
虽然结合各种实施例来描述本发明教示,但是并不旨在将本发明教示限制于这类实施例。相反,如所属领域的技术人员应了解,本发明教示涵盖各种替代例、修改以及等效物。
此外,在所描述各种实施例中,说明书可能将方法和/或过程呈现为特定的步骤顺序。然而,在方法或过程不依赖于本文中所阐述的特定的步骤次序的程度上,方法或过程不应限于所描述的特定的步骤顺序。如所属领域的普通技术人员将了解,其它步骤顺序可以是可能的。因此,本说明书中所阐述的特定步骤次序不应被解释为对权利要求的限制。另外,针对方法和/或过程的权利要求不应限于以书写的次序进行其步骤,并且所属领域的技术人员将易于了解,顺序可以变化并且仍保持在各种实施例的精神和范围内。
虽然已经在本文中展示且描述了本发明的优选实施例,但所属领域的技术人员应显而易见,这类实施例是仅作为实例而提供。所属领域的技术人员现将在不脱离本发明的情况下意识到大量变化形式、改变以及取代。应理解,本文中所描述的本发明的实施例的各种替代例可以用于实践本发明。所附权利要求旨在限定本发明的范围,并且由此覆盖这些权利要求和其等效物的范围内的方法和结构。
本文中所描述的本发明是可缩放生物反应器系统和方法集合,其使得生物生产空间中的制造者能够通过更改规模之间的硬件来预测先前论述的生理生长条件,以实现两个或更多个规模之间的类似混合曲线和生长条件。举例来说,缩放的生物反应器系统可包含两个或更多个不同大小的生物反应器,所述生物反应器通过更改槽的几何形状、叶轮的大小和数目、叶轮与槽的直径(宽度)比率、鼓泡设计和两个或更多个规模之间的CO2覆盖层去除系统来实现类似的总流体、叶轮尖端处的类似剪切力和类似的每体积功率输入比率。换句话说,本发明中的两个或更多个生物反应器可以具有截然不同的物理特性,同时仍然实现类似的混合曲线和生长条件,以便在小规模(包含工作台规模)下预测商业规模生物生产系统。
局部剪切力的量值、混合功率耗散率和总流体流应在按比例增大设计中得到更充分的解决。这可以通过优化叶轮的功率分配(增加较大容器中的叶轮数量)来完成。通过对叶轮(随着体积的增大而增加数量)间隔多远进行限制或使用CFD或RPT模型优化总流体混合性质,并还更改叶轮的大小或形状(不一定是形状,也可以是扫掠区域、叶片几何形状、表面纹理性质或直径,以便匹配由搅拌器的流体移动产生的流体动力学(涡流)轮廓)。主要目标是跨至少3个体积规模量值实现几乎相同的最大剪切力水准,同时递送类似的P/V、总流、T95混合时间且使用用于细胞培养且在由细胞培养敏感性施加的实际限值内的合理功率输入值来这样做,所述细胞培养敏感性可能在极大工作体积(>1000L)中出现。本文中所描述的发明将使反应器的按比例放大跨规模更可预测且因此更容易/在逻辑上进行调试,这是因为剪切力分布是类似的且总流体移动几乎相同。本发明的目的是解决现在由于在更改细胞株、流体类型、细胞密度或培养基调配物时固有影响的广泛的细胞培养过程敏感性差异而存在的未满足的需求。
本文中的方法设计成实现设计及特性化反应器按比例放大将跨规模更可预测且因此更容易/逻辑上调试的所期望结果,这是因为剪切力分布更类似且总流体移动几乎相同。此处的目的是解决现在由于在更改细胞株、流体类型、细胞密度或培养基调配物时固有影响的广泛的细胞培养过程敏感性差异而存在的未满足的需求。
关于非圆形容器,出于多种原因,使用带有偏离中心线的中心驱动搅拌器的矩形容器是有益的。这两个几何形状(非正方形且非居中)的不平衡设计可能在系统内产生改善的阻挡效果和期望的混合翻转(总流)。我们的数据支持提高质量传递和混合性能的想法,通过我们的性能测量展示了与类似工作体积下的圆形设计相比,kLa和混合提高>2X。随着容器额定工作体积的减小,缩放叶轮以匹配尖端速度和P/V将产生成比例地更小的叶轮。这有助于补偿在更小规模下出现的流体力学的固有改变(成比例地更大的叶轮与容器壁的间隙将激励和诱导总流,其比大规模系统的总流更具代表性)。随后将这些混合设计特征与最优鼓泡位置组合且这将在大规模下引起大幅提高生物反应器效率。两相混合效率增益将增加气泡在液柱内的停留时间,且来自多个叶轮的总体改善的气泡分布都是已知用以显著提高质量传递性能的高度期望的属性。
图1示出了根据各种实施例的流体混合系统100。混合系统100通常包括刚性壳体102;发动机104,其安装到刚性壳体102;第一轴承总成106,其通过驱动轴120与发动机104旋转连通并向柔性隔室118的内部提供旋转移动;铰链108,其用以将门110固定到刚性壳体102并为柔性隔室118提供封盖;刚性壳体支撑件112,其用于将刚性壳体102安装到其上;和支撑轮114,其附连到刚性壳体支撑件112和为混合提供移动性。刚性壳体102可具有刚性壳体开口122,其切入刚性壳体底板124中以用于保持来自柔性隔室218的一个端口228或更多和第二轴承总成222。在一些实施例中,刚性壳体可原地固定且不需要支撑轮114。在这类实施例中,可将刚性壳体支撑件112栓接到螺钉,或仅通过刚性壳体102的重量原地固持。
图2示出了根据各种实施例的流体混合系统200的截面图。混合系统200包括发动机202,其安装到具有驱动轴120的刚性壳体208,所述刚性壳体通过第一轴承总成204与柔性隔室218的内部无菌旋转连通。混合系统200还包括螺旋总成214,所述螺旋总成由磁轭230和磁轭/叶轮232组成,所述磁轭和磁轭/叶轮用以使传动系统206悬挂在柔性隔室218的第一端234与第二端236之间。可将磁轭/叶轮232安装到第二轴承总成222,以在柔性隔室218的相对端上向螺旋总成214提供旋转移动。可将一个叶轮216或更多安装到螺旋总成214上,以向柔性隔室218内的流体提供混合。为了便于将柔性隔室218安装到刚性壳体208中,可将拉手220安装到柔性隔室218的第二端236上,且在一些实施例中,可将所述拉手安装到第二轴承总成222上。可将刚性壳体208安装到刚性壳体支撑件224且可将支撑轮226附接到刚性壳体支撑件224上以向混合系统200提供移动性。在各种实施例中,柔性隔室218进一步包括至少一个端口228,其可凸出穿过刚性壳体底板124、238。
在各种实施例中,用户可将刚性壳体102、208的门110打开以用于容易地安装柔性隔室118、218。如图1中所见,当门110移动到打开位置时,刚性壳体102、208的顶表面126可以在前面上完全打开。顶表面126可呈“U”形周边形状,其包括后部和朝门延伸的两个侧部。当门110处于打开配置时,可将柔性隔室118、218移动到刚性壳体102、208的腔室中。随后可将位于柔性隔室118、218的第一端116、234上的第一轴承总成106、204插入到驱动轴120、240上。可在具体以全文引用的方式并入本文中的2016年12月28日提交的US2017-0183617中找到涉及将柔性隔室118、218安装到驱动轴120的另外的公开内容。附接到刚性壳体102、208的吊钩(未展示)可以钩在柔性隔室118、218上的环(未展示)上,以进一步将柔性隔室118、218固定到刚性壳体102、208的顶表面126。一旦将柔性隔室118、218的第一端116固定到刚性壳体102、208的顶表面126,第二端236就可以滑入到刚性壳体底板124、238中。在各种实施例中,柔性隔室118、218将包括从柔性隔室118、218的第二端236的外部凸出的一个端口228或更多和第二轴承总成222。刚性壳体底板124、238中的刚性壳体开口122可配置成容纳一个端口228或更多和第二轴承总成222,从而将柔性隔室118、218的第二端236固定到刚性壳体102、208的刚性壳体底板124、238。在一些实施例中,封盖(未展示)可以覆盖刚性壳体开口122以进一步将一个端口228或更多和第二轴承总成222固定到刚性壳体102、208的刚性壳体底板124、238。在各种实施例中,用户可以握住位于柔性隔室118、218的第二端236处的拉手220,以将柔性隔室118、218拉到刚性壳体102、208内的适当位置。
在各种实施例中,一旦实现安装,就可以将流体馈入到无菌柔性隔室118、218中,所述流体可能需要混合。可以使用控制器(未展示)启动发动机104、202,所述控制器随后可以旋转先前插入到第一轴承总成106中的驱动轴120、240。在一些实施例中,可能存在从发动机104、202凸出且突入无菌柔性隔室118、218中的单一驱动轴120、240,且在其它实施例中,第一轴承总成106将封闭且具有从第一轴承总成106延伸的第二驱动轴部分242。在各种实施例中,驱动轴120或第二驱动轴部分242将安装到磁轭230,所述磁轭用于将传动系统206的第一线210与第二线212间隔开。在柔性隔室118、218的第二端236上,可存在包括包括磁轭/叶轮232的第二轴承总成222,所述磁轭/叶轮操作以悬挂第一线210和第二线212的其它端并在其旋转时提供混合。第二轴承总成222可设计成提供旋转移动,使得旋转以允许螺旋总成214在发动机104、202从相对端驱动螺旋总成214时自由旋转。除了磁轭/叶轮232之外,一个叶轮216或更多可提供混合。
在各种实施例中,磁轭/叶轮232的附加优点是提供极低的体积混合。举例来说,生物反应在反应开始时可能需要较小体积,且流体体积可能随着生物反应充分完成而增加。当前可用的生物反应器在按比例放大方面具有局限性,本实施例降低了局限性。当考虑给定生物反应器的最优按比例放大时,也可将一个叶轮216或更多附连在螺旋总成214上的各种位置处。在一些实施例中,磁轭/叶轮232可以在排放过程期间以极低体积保持流体中的均匀混合。
图3示出了根据各种实施例的柔性隔室300。柔性隔室300包括第一端302;相对第二端304;侧壁306,其连接第一端302和第二端304;至少三个面板308,其接合第一端302和第二端304;侧壁线310;中心线312;和角线314。
在各种实施例中,中心线312是从柔性隔室300的第一端302的中心延展到第二端304的中心的竖直轴的指示器。举例来说,中心线312可放置成使得从中心线312到相对面板308的长度相等。在各种实施例中,侧壁线310可以是从柔性隔室300的第一端234延展到第二端304的平面的指示器并且从中心线312延伸到面板308的中点。在各种实施例中,角线314可以是从柔性隔室300的第一端302延展到第二端304的平面的指示器并且从中心线312延伸到两个面板308接合以形成角的位置。在各种实施例中,当减少盲区并增加总流体且从而提高混合系统100、200内的总体混合效率时,以上列出的指示器可用于确定螺旋总成214将停留在柔性隔室300中的何处。
图4示出了根据各种实施例的混合系统400。混合系统400包括柔性隔室402,所述柔性隔室具有由侧壁408接合在一起的第一端404和相对第二端406,所述侧壁具有至少三个面板410和面板相交处的侧壁角412。柔性隔室402可进一步包含一或多个入口414、一或多个出口416、一或多个鼓泡器418、一或多个传感器端口422,所述传感器端口任选地含有传感器420和排放口424。在各种实施例中,螺旋总成426可以悬挂在柔性隔室402的第一端434与第二端436之间,并且具有定位在其上的一或多个叶轮428。在各种实施例中,驱动轴430可突出到第一轴承总成432中且第一轴承总成432可在柔性隔室402的外部上的驱动轴430到柔性隔室402的内部上的磁轭之间提供无菌连接。在各种实施例中,第二轴承总成440可以定位在柔性隔室402的第二端406上且可包含突出到柔性隔室402的外部部分上和相对/内部部分上的拉手444,第二轴承总成440可以连接到磁轭/叶轮442。在各种实施例中,螺旋总成426可由第一线446和第二线448组成,所述第一线和第二线各自具有连接到磁轭438的第一端434和连接到磁轭/叶轮442的第二端436,且在操作期间,可施加旋转移动以在柔性隔室402内混合流体450。在各种实施例中,柔性隔室402可包含附连到所用第二轴承总成222或模制为所用第二轴承总成的一部分的附接环452,所述附接环可在安装期间滑动到刚性壳体102、208上的保持器件中。在一些实施例中,设计可包含卡环,所述卡环装配到销上且可滑动到柔性隔室402的底部端口中。
在各种实施例中,柔性隔室402可包含一或多个入口414和出口416。可以在安装过程期间使用入口414以将气体添加到柔性隔室402中,以便使柔性隔室402膨胀到其工作体积。另外,入口414可用于引入干燥培养基、缓冲液、液体营养物或需要混合的任何其它东西。在混合过程完成或生物反应实现所需状态后,出口416可用于收集柔性隔室402的内容物。另外,排放口424可用于清空柔性隔室402内的废物。存在所属领域中已知用于附接入口414、出口416和排放口424的各种方式。常用技术是将组分焊接到柔性隔室402。举例来说,组分可包含可焊接到包括柔性隔室402的聚合物的聚合物。US 2017-0183617包含用于产生柔性隔室402的常见可焊接材料列表。
在各种实施例中,传感器422可用于监测柔性隔室402内的环境条件。存在市场上可获得的多种传感器和传感器端口420,包含2007年3月26日提交的US 2008-0032389中描述的传感器和传感器端口,所述申请具体以全文引用的方式并入本文中。在以上引用的参考文献中描述了各种技术,所述的参考文献公开了使用焊接和粘附方法将传感器端口420粘合到柔性隔室402的方式。
在各种实施例中,本文中所描述的混合系统400可用于培养细胞,且随后整体收获细胞或收获细胞副产物,如蛋白质或酶。这类生物反应通常需要引入气体,这通常在生物生产领域中在使用鼓泡器418的情况下完成。在具体以全文引用的方式并入本文中的2012年9月28日提交的US 2013-0082410中描述了各种鼓泡器418设计和其附接方法。
在各种实施例中,第一轴承总成432和第二轴承总成440可包含第一环形密封凸缘454和第二环形密封凸缘456,可以通过在周边周围进行焊接或粘合将所述第一环形密封凸缘和所述第二环形密封凸缘密封到柔性隔室402上的开口。如US 2017-0183617中所公开,这允许毂的旋转移动,同时外壳保持固定到柔性隔室402,从而允许螺旋总成426在柔性隔室402内自由旋转,同时保持对外部无菌。
在各种实施例中,附接环452可以可啮合到刚性壳体102、208上的保持器件。保持器件可以采用能够保持和/或限制附接环452的移动的托架或某一其它物理结构的形式。通常,在安装过程期间,用户将拉手444拉入刚性壳体开口122中,以便促进附接环452和保持器件相互作用,以便完成柔性隔室402的安装。
在各种实施例中,如图4所描绘,螺旋总成426相对于柔性隔室402的最优位置将沿着中心线312。
图5是根据各种实施例的螺旋总成500的一部分的分解图的图示。螺旋总成500可包括第一线502、第二线504、一或多个横档516、一或多个稳定器524以及一或多个叶轮536。每条线可包含第一端506、510和第二端508、512。
在各种实施例中,螺旋总成可包括一或多个横档516,其具有突出穿过第一线502上的开口514的第一凸出部518和突出穿过第二线504上的开口514的第二凸出部520。在一些实施例中,横档盖522可卡扣到凸出部518、520上以将横档516固定到线502、504。
在各种实施例中,螺旋总成500可包含稳定器524,所述稳定器包含横梁526,所述横梁具有突出穿过第一线502上的开口514的第一端530和突出穿过第二线504上的开口514的第二端532。稳定器盖534可卡扣到端530、532上,以将稳定器524固定到螺旋总成500上。在一些实施例中,杆528可以从中心并垂直于横梁526突出。
在各种实施例中,叶轮536可包含鳍片538,所述鳍片具有突出穿过第一线502上的开口514的第一附接件542和突出穿过第二线504上的开口514的第二附接件544。在一些实施例中,叶轮盖546可卡扣到附接件542、544上以将叶轮536固定到螺旋总成500上。在各种实施例中,接收器540可从中心并垂直于叶轮536延伸。
在各种实施例中,接收器540本质上可以是管状的并且容纳来自稳定器524的杆528。当螺旋总成500的旋转速率变化时,接收器540和杆528可相对于彼此滑动。
图6是并入本发明的特征的混合系统600的一个实施例的图示。混合系统600包括大体上刚性支撑刚性支撑壳体602,其中安置有柔性容器604。刚性支撑壳体602具有上部端606、下部端608和接合隔室612的内表面666。在下部端608处形成有底板614。环绕侧壁616从底板614向上延伸到上部端606。如下面将更详细论述,一个开口618或更多可以延伸穿过刚性支撑壳体602的底板614或侧壁616,以便与隔室612连通。特此具体以引用方式并入的2017年5月9日发布的美国专利第9,643,133号中公开了可用于本公开发明中的鼓泡器器件和系统的实例。
上部端606终止于唇缘620处,所述唇缘将入口开口622接合到隔室612。如果需要,可将盖(未展示)安装在上部端606上,以便覆盖入口开口622。同样地,可在刚性支撑壳体602上的另一位置处形成进入口,如穿过第二端处的侧壁616或穿过底板614。进入口足够大,使得操作者可以达到进入口以帮助操纵和定位柔性容器604。可通过门或盖板选择性关闭进入口。
应了解,刚性支撑壳体602可以具有各种不同大小、形状和配置。举例来说,底板614可以是平坦的、截头圆锥形的或具有其它倾斜度。侧壁616可具有圆形、多边形的横截面或具有其它配置。刚性支撑壳体602可被隔热和/或夹套,使得加热或冷却的流体可以流动穿过夹套以加热或冷却柔性容器604中含有的流体。柔性容器604可以是任何期望的体积,如下面讨论的那些体积。
还如图6中所描绘,柔性容器604至少部分地安置在支撑刚性支撑壳体602的隔室612内。柔性容器604包括其上安装有一或多个端口626的容器624。在所描绘的实施例中,容器624包括具有内表面610的柔性袋,所述内表面接合适于收纳流体630或其它类型的材料的腔室628。更具体地说,容器624包括侧壁632,当容器624膨胀时,所述侧壁可具有在第一端634与相对第二端636之间延伸的大体上圆形或多边形的横截面。第一端634终止于顶端壁638处,而第二端636终止于底端壁640处。
容器624可由一或多个柔性不透水材料薄片组成,如低密度聚乙烯或具有通常在约0.1mm到约5mm之间的范围内的厚度(其中约0.2mm到约2mm更为常见)的其它聚合薄片。也可使用其它厚度。所述材料可由单层材料组成或可包括两个或更多个层,将这些层密封在一起或分离以形成双壁容器。在将层密封在一起的情况下,材料可包括层压或挤出材料。层压材料可包括两个或更多个单独形成的层,这些层随后通过粘附剂固定在一起。
挤出材料可包括单个整体薄片,其包括各自由接触层分离的两个或更多个不同材料层。将所有层同时共挤出。可用于本发明中的挤出材料的一个实例是可购自犹他洛根州(Logan,Utah)的HyClone Laboratories公司的HyQ CX3-9膜。HyQ CX3-9膜是在cGMP设施中产生的三层9mil的铸造膜。外层是与超低密度聚乙烯产品接触层一起共挤出的聚酯弹性体。可用于本发明中的挤出材料的另一实例是同样可购自HyClone Laboratories公司的HyQ CX5-14铸造膜。HyQ CX5-14铸造膜包括聚酯弹性体外层、超低密度聚乙烯接触层和安置在它们之间的EVOH阻挡层。在又一实例中,可使用由三个独立的吹塑膜网制成的多网膜。两个内网各自是4mil单层聚乙烯膜(HyClone将其称为HyQ BM1膜),而外部阻挡网是5.5mil厚的6层共挤出膜(HyClone将其称为HyQ BX6膜)。
材料可被批准用于与活细胞直接接触并能够使溶液保持无菌。在此实施例中,材料还可如通过电离辐射进行灭菌。在各自特此具体以引用的方式并入本文中的2000年7月4日发布的美国专利第6,083,587号以及2003年4月24日公开的美国专利公开第US 2003/0077466 A1号中公开了可用于不同情形中的材料的实例。
在一个实施例中,容器624包括二维枕头式袋,其中两个材料薄片以重叠关系放置,并且两个薄片在它们的外周处接合在一起以形成内部腔室628。替代地,单个材料薄片可以折叠并且在外周周围进行缝合以形成内部腔室628。在另一实施例中,容器624可以由按长度切割且端缝合为闭合的聚合材料的连续管状挤出物形成。
在又其它实施例中,容器624可以包括不仅具有环形侧壁而且具有二维顶端壁638和二维底端壁640的三维袋。举例来说,三维容器624可包括由按长度切割的聚合材料的连续管状挤出物形成的侧壁616,如图7中所展示。随后可将圆形顶端顶端壁638和底端壁640焊接到侧壁616的相对端。在又一实施例中,三维容器624可由多个离散的面板(通常三个或更多个,且更通常地在四个到六个之间)组成。每个面板可以大体上相同,且包括容器624的侧壁632、顶端壁638和底端壁640中的一部分。将邻接面板的周边边缘缝合在一起以形成容器624。通常使用所属领域中已知的方法(如热能、RF能、声能或其它密封能量)来形成缝隙。在替代实施例中,面板可以多种不同图案形式形成。
应了解,容器624可制造成具有实际上任何期望的大小、形状和配置。举例来说,容器32可形成为具有大小为10升、30升、100升、250升、500升、750升、1,000升、1,500升、3,000升、5,000升、10,000升或其它期望体积的腔室628。腔室628还可具有在约10升到约5,000升或约30升到约1,000升之间的范围内的体积。也可使用从上述体积中选择的任何其它范围。尽管容器624可以是任何形状,但是在一个实施例中,容器624被具体配置成与刚性支撑壳体602的隔室612互补或大体上互补。
然而,在任一实施例中,通常期望在将容器624接收于隔室612内时,容器624通常由支撑刚性支撑壳体602均匀地支撑。刚性支撑壳体602对容器624的至少大体上均匀的支撑有助于防止当填充有流体时由施加到容器624的液压力引起的容器624的故障。
尽管在以上论述的实施例中,容器624呈柔性容器604的形式,但在替代实施例中,应了解,容器624可包括任何形式的可伸缩容器、柔性容器604或半刚性容器。此外,相比于具有封闭的顶端壁638,容器624可包括开放式顶部衬里。容器624还可以是透明或不透明的,且可具有并入其中的紫外线抑制剂。
多个端口626安装在顶端壁638上,所述端口与腔室628流体连通。尽管展示了两个端口626,但应了解,取决于容器624的预期用途,可存在一个或三个或更多个端口626。如此,取决于待进行的类型处理,每个端口626可用于不同目的。举例来说,端口626可与管642联接,以用于将流体或其它组分分配到腔室628中或从腔室628中抽出流体。另外,如当容器624用作用于生长细胞或微生物的生物反应器时,端口626可用于提供各种探针,如温度探针、pH探针、溶解氧探针等,以进入腔室628。应了解,端口626可以具有各种不同的配置且可以放置在容器624上的任意数目的不同位置处,包含侧壁616和底端壁640。
尽管不是必需的,但在一个实施例中,提供了用于在腔室628内混合流体630的构件。用于混合的构件可呈混合总成的形式。作为实例但非限制,在如图6中所展示的一个实施例中,驱动轴646突出到腔室628中且具有安装在其端上的叶轮648。动态密封件650在驱动轴646与容器624之间形成密封。驱动轴646的外旋转促进在腔室628内混合和/或悬浮流体630的叶轮648的旋转。在具体以引用方式并入本文中的2008年6月10日发布的美国专利第7,384,783号和2010年3月23日发布的美国专利第7,682,067号中公开了如何将旋转混合总成并入到柔性容器中的具体实例。
在用于混合的构件或混合总成的又一替代实施例中,可通过在腔室628内竖直地往复移动竖直混合器来实现混合。在具体以引用的方式并入本文中的2006年9月7日公开的美国专利公开第2006/0196501号中公开了关于竖直混合器的总成和操作的其它公开内容。在又其它实施例中,应了解,混合可通过简单地使流体循环通过腔室628来实现,如通过使用蠕动泵通过在容器624内旋转磁性叶轮或搅拌棒将流体移入或移出腔室628和/或通过在流体内注入足够的气泡来混合流体。也可以使用其它常规混合技术。
继续图6,底端壁640具有并入其中的多个鼓泡器。具体地,底端壁640包括具有第一侧面654和相对的第二侧面656的第一薄片652。第一薄片652覆盖第二薄片658,所述第二薄片同样具有第一侧面660和相对的第二侧面662。第一薄片652和第二薄片658通常包括柔性聚合物薄片,如上文关于容器624所论述的那些薄片。如上文关于底端壁640所论述,第一薄片652可包括连续薄片,在周边边缘702周围将所述连续薄片焊接到侧壁632,如图7中所描绘。替代地,第一薄片652可包括侧壁616的整体部分,或可包括固定在一起的多个单独的薄片,所述单独的薄片附接到侧壁616或是侧壁616的整体部分。可如沿着第二薄片658的周边边缘704将第二薄片658焊接到第一薄片652的第二侧面656和/或焊接到侧壁616。在其它实施例中,第二薄片658可焊接到侧壁616或包括侧壁616的整体部分,如上文关于第一薄片652所论述,同时将第一薄片652焊接或以其它方式固定到第二薄片658的第一侧面660和/或侧壁616。
图8中描绘了覆盖第二薄片658的第一薄片652的俯视图。在这个实施例中,通过焊接线802将第一薄片652和第二薄片658焊接在一起。与本文中所论述的其它焊接线一样,焊接线802可以使用任何常规技术形成,如激光焊接、声波焊接、热焊接等。焊接线802展示为将第一薄片652和第二薄片658的周边或外部边缘焊接在一起,但是可以从周边边缘中的一个或两个或在其它位置处径向向内形成。还如图8中所展示,通过在第一薄片652与第二薄片658之间产生其它焊接线来形成四个单独的鼓泡器804、806、808、810。
举例来说,通过在位于或邻接第一薄片652和/或第二薄片658的周边边缘的第一位置820处开始并沿着鼓泡器804的预定路径延伸到第一薄片652和第二薄片658的内部中且随后循环回到在或邻接第一薄片652和/或第二薄片658的周边边缘处的邻接第一位置820的第二位置822形成焊接线812、814、816、818来形成鼓泡器804、806、808、810。焊接线812接合鼓泡器路径824的周边,所述周边是接合于第一薄片652与第二薄片658之间且由焊接线812部分环绕的区域。在所描绘的实施例中,鼓泡器路径824包括从第一端830延伸到相对的第二端834的气体传递路径826。在第一位置820与第二位置822之间且在第一薄片652与第二薄片658之间的第一端830处形成开口828,可通过所述开口将气体馈入到气体传递路径826中。鼓泡器路径824还包括形成于第二端834处的鼓泡区832,所述鼓泡区与气体传递路径826流体连通。在所描绘的实施例中,气体传递路径826是窄的细长路径,而鼓泡区832形成扩大的圆形区。也可使用其它配置。
多个穿孔836延伸穿过鼓泡区832的第一薄片652,使得气体可沿着气体传递路径826进入鼓泡区832中,且随后通过穿孔836流出,以在安置在腔室628内的流体630内形成气泡。类似地形成鼓泡器806、808、810,其中相同的附图标记用于识别相同的元件。通过使用这种技术,可在容器624上容易地形成多个离散的鼓泡器。每个鼓泡器可安置在任何期望位置处且可为任何期望的大小、形状或配置。同样地,尽管展示了四个鼓泡器,但应了解,可以用第一薄片652和第二薄片658形成任意数目的鼓泡器,如1、2、3、5或更多个。鼓泡区可以均匀地分布在第一薄片652和第二薄片658上方,或可以位于最优鼓泡的限定的位置处。举例来说,可将鼓泡器直接安置在用于混合的构件的下方,使得由混合器产生的流体630的混合或移动有助于将气泡夹带在流体630内。
在一些实施例中,每个鼓泡器可以具有相同数目个穿孔836,且所有穿孔836可为相同的大小和形状。在替代实施例中,穿孔836在两个或更多个不同的鼓泡器之间可以是不同的。举例来说,不同的鼓泡器可具有不同数目、大小和/或形状的穿孔836,以优化不同情况下的性能。更大穿孔836产生更大气泡,其对于从流体630中剥离C02来说可能是最优的,而更小穿孔产生更小气泡,其对于为流体630充氧来说可优选的。同样地,增加穿孔836的数目可能有助于使气泡混合流体和/或增加剥离或充氧。在其它实施例中,应了解,鼓泡器804、806、808、810中的一或多个可具有不同穿孔836的组合。举例来说,单个鼓泡器可具有较小和较大穿孔836两个。在一个实施例中,较小气泡由通常具有小于0.8mm、0.4mm或0.2mm、0.1mm的直径的穿孔836形成,而较大气泡由通常具有大于1.5mm、0.8mm、0.4mm或0.15mm的直径的穿孔形成。也可以使用其它直径的穿孔。穿孔和所得气泡的大小取决于预期用途和容器624的大小。举例来说,当在较大容器中处理较大体积流体时,较大气泡通常比在较小容器中处理相对较小体积流体时大。用于小气泡的穿孔的直径与用于大气泡的穿孔的直径之间的方差或增量通常至少为0.15mm、0.3mm、0.5mm或1mm且通常在这些值的±0.1mm或±0.5内。也可使用其它方差。
如下面更详细地论述,鼓泡器804、806、808、810可同时操作,或替代地,可使用歧管或其它调节器,使得可操作鼓泡器中的一或多个而未操作其它鼓泡器。因此,通过具有带不同穿孔836的不同鼓泡器,可以在不同情况或时间使用选择鼓泡器以优化性能。
在一些实施例中,应了解,不需要鼓泡器804的气体传递气体传递路径826。举例来说,可形成穿过覆盖气体传递路径826的第一薄片652的穿孔836,以便在鼓泡区832的一部分中转换气体传递路径826。应了解,可以使用任何常规技术来形成穿孔836。举例来说,穿孔836可形成为薄片的制造过程的部分,或可以随后通过冲压机或其它技术来产生。在一个实施例中,一或多个激光可用于形成穿孔836。使用激光的优点是可以在精确的位置处并以精确的直径形成穿孔836,使得可形成具有精确的预定大小的气泡。此外,当使用激光形成穿孔时,由激光熔化的材料在穿孔的周边边缘周围聚集,从而加固穿孔并有助于防止薄片破裂。
在本发明的一个实施例中,歧管可用于控制流向鼓泡器804、806、808、810中的一或多个的气体流动。举例来说,图8中描绘了并入本发明的特征的歧管664的一个实施例。歧管664包括主体838,所述主体具有进气口840和多个出气口842、844、846、848。出气口842、844、846、848通过叉状流动路径850与进气口840平行连通。气体源(如压缩机或压缩气体罐)与进气口840流体联接。气体可以是空气、氧气或任何其它气体或气体组合。气体线706分别从出气口842、844、846、848延伸到分别在每个鼓泡器804、806、808、810的第一端830处的对应开口828。可在开口828处将气体线706焊接于第一薄片652与第二薄片658之间,以便密封封闭的开口828。气体线706可包括柔性或刚性管,并且可与主体838整体形成或单独附接到所述主体。
阀852安装在主体838上,并分别控制流向每个气体线706的气体流动。在一个实施例中,阀852可以是电动阀,如电磁阀,其可以用于打开、关闭或限制流向鼓泡器804、806、808、810的气体。在这个实施例中,电线854可以联接到阀852以用于控制其操作。在其它实施例中,阀852可包括手动、液压、气动或其它方式操作的阀。通过使用歧管664,可以在不同的时间使用不同的鼓泡器或鼓泡器的不同组合以优化性能,如上所述。
图9示出了根据各种实施例的混合系统900。混合系统900可包括柔性隔室902,其具有第一端904、第二端906和侧壁908;偏移驱动轴910,其安置在柔性隔室902内且具有第一轴承总成912和第二轴承总成914,其中第一叶轮916分别附连到柔性隔室902的第一端904和第二端906且第一叶轮916和第二叶轮918附连到驱动轴910,其中柔性隔室902进一步包含鼓泡器920,所述鼓泡器具有设计成将气泡924释放到流体926中的至少一个穿孔922。
在各种实施例中,鼓泡器920将气体释放到流体926中以将溶解的氧气添加到流体926中。可选择鼓泡器920在柔性隔室902的第二端906上的位置,使得气泡924最优地与第一叶轮916和第二叶轮918相互作用。举例来说,如果生物反应需要指定量的溶解氧气,那么混合系统900可以通过利用叶轮916、918重新夹带气泡924来优化气泡924在流体内的停留时间。这可以通过调整鼓泡器920的位置来实现,使得所有气泡924被重新夹带,没有气泡924被重新夹带,或特定百分比的气泡924被重新夹带。举例来说,鼓泡器920可以移动远离第二轴承总成914,这将使得气泡924被重新夹带的可能性较小。在各种实施例中,通过第一叶轮916和/或第二叶轮918或以任何组合重新夹带0%、10%、20%、30%、40%、50%、60%、70%、80%、90%或100%的气泡924一次。在各种实施例中,可调整叶轮旋转速率以影响混合系统900中发生的重新夹带的量。气泡924直径和叶轮性质的组合的选择也可能影响气泡924的停留时间。
在各种实施例中,可基于正在生长的细胞类型来选择穿孔922的直径和数量以优化混合系统900的操作特性。举例来说,如果需要增加在混合系统900中的停留时间以在流体926中实现所期望的溶解氧气含量,那么穿孔922可以较小以产生较小的气泡924。如果结合叶轮在驱动轴910上的位置来选择鼓泡器920的位置和性质以根据所期望的生物反应所需进行更多或更少重新夹带,那么停留时间也可能增加。
在各种实施例中,可缩放混合系统900可包含如图9中所展示的两个或更多个混合系统900,其中系统的体积可以变化。体积的范围可介于小于50升的测试大小与大于50升的商业大小之间。可以基于按比例放大/缩小成本来选择体积。举例来说,可以在较小的测试体积大小中确定使用给定细胞类型产生产物的最优条件,使得可以在昂贵的商业系统中预测结果,而不必在较大体积的反应上花费资源进行优化。在一些实施例中,在两个或更多个混合系统900之间,叶轮尖端速度(剪切力)和每体积功率输入可以保持恒定,而叶轮的数量和其直径可以变化(见图23)。在一些实施例中,鼓泡器920的位置和穿孔922的数目和大小可以在测试大小与商业大小混合系统900之间变化。
图10示出了根据各种实施例的混合系统1000。混合系统900可包括柔性隔室902,其具有第一端904、第二端906和侧壁908;偏移驱动轴910,其安置在柔性隔室902内且具有第一轴承总成912和第二轴承总成914,其中第一叶轮916分别附连到柔性隔室902的第一端904和第二端906且第一叶轮916和第二叶轮918附连到驱动轴910,其中柔性隔室902进一步包含鼓泡器920,所述鼓泡器具有设计成将气泡924释放到流体926中的至少一个穿孔922。
在各种实施例中,驱动轴910可在柔性隔室902内成角度并且偏移。这种配置将通过更改发生的气泡924重新夹带的量来改变生物反应的操作参数。举例来说,如果鼓泡器920接近第二轴承总成914定位,那么第一叶轮916可重新夹带气泡924,而第二叶轮918可以不接触那么多气泡924以用于重新夹带。因此,可取决于驱动轴910的角度来更改流体926内的溶解氧气含量。另外,基于柔性隔室902内的驱动轴910的偏移量和成角度量,可增大、减小矩形的柔性隔室902的阻挡效果,或完全更改混合图案。
图11示出了根据各种实施例的包含用于气体流质量传递的系统和方法的混合系统1100。尽管本文中主要关于为生物培养物充氧来论述气体流质量传递,但是相同的方法和系统也可用于为其它类型的液体(如上文所提及的液体)充氧。另外,如下面更详细地论述,本发明的方法和系统不限于为流体充氧,而是可以与其它气体一起使用以影响传入液体中和/或从液体中传出的任何类型的质量传递。
当气体流质量传递用于为反应器容器内的生物培养物充氧时,气体流质量传递(尤其比常规鼓泡技术)具有许多处理优点。在将反应器容器设计成在流体体积的相对较大变化下处理细胞或微生物的培养物的情况下,容器的直径通常需要相对较大以保持几何形状和高度要求。随着容器的直径相对于体积增加,容器内的培养物的深度减小。因此,对于容器内极小体积的培养物,如在将初始体积的培养物传递到容器中时,通常从容器的底板鼓泡到培养物中的充氧气泡的停留时间不足以为培养物正确地充氧。也就是说,由于培养物的深度过浅,因此当气泡从鼓泡器行进到培养物的顶表面时,充氧气泡在培养物内的时间不足以为培养物完全充氧。同样地,用于剥离CO2的较大鼓泡气泡的停留时间也不足以从培养物中完全去除不需要的CO2。由于CO2气体比空气重,使得CO2像覆盖层一样覆盖在培养物的顶表面上,从而进一步阻碍了培养物的充氧和去除CO2,因此这一问题进一步加剧。
相比于随着培养物的深度增加而变得更高效的鼓泡,通过在培养物的顶表面上方吹入空气或含氧气的其它气体流实现的气体流充氧或质量传递随着培养物或正处理的其它流体的深度减小而变得更高效。因此,气体流充氧尤其适用于安置在反应器(包含以较小体积开始并增大到较大体积的反应器)内的深度较浅的培养物。另外,已知鼓泡会在培养物的顶表面上产生不需要的泡沫,尤其是在所使用的鼓泡器产生极小的气泡(亚毫米直径)时。相比之下,气体流质量传递产生最少泡沫,且可通过减少所需的传统鼓泡量来帮助减少容器泡沫产生。此外,气体流充氧防止在培养物的表面上形成CO2覆盖层。如此,培养物的表面上的气体既受到良好控制,又充分混合,从而使CO2从培养物中耗散,混合到反应器的顶部空间中,并经由系统排气口离开。气体流充氧与系统液体的相互作用还有助于直接促进从培养物中剥离CO2。因此,对于相对较浅深度的培养物,可使用气体流充氧来为培养物充氧并从培养物中去除CO2,在一些情况下,消除了以本发明的某些形式进行传统鼓泡的需要。
随着反应器内培养物的深度增加,通过气体流充氧为反应器的底部处的培养物充氧的效率降低。因此,随着培养物的深度增加,可使用溶解的O2传感器或其它参数或机制来确定何时应启动鼓泡或其它充氧方法。也就是说,随着培养物的深度增加,可如通过逐步递增增加或通过连续逐渐增加来启动鼓泡,以便确保总是为培养物正确地充氧。所施加的气体流充氧可随着鼓泡增加而减少或可保持恒定。即使气体流没有为培养物完全充氧,气体流仍会平衡培养物的上部区域并防止CO2覆盖,这反过来帮助传统的鼓泡操作。因此,即使对于相对较深体积的培养物,气体流充氧也可以继续与鼓泡或其它充氧方法结合使用。应了解,可使用电子控制器来基于传感器读数自动地启动和/或调节鼓泡和气体流动。
现在将论述可用于进行气体流充氧/质量传递的系统的实例。在特此具体以引用方式并入的2016年7月12日发布的美国专利第9,388,375号中公开了可用于本公开发明中的顶部空间气流器件和系统的额外实例。图11中描绘了并入本发明的特征的反应器系统10的一个实施例。一般来说,反应器系统10包括支撑壳体12,其接合腔室14;容器总成16,其安置在腔室14内;和混合系统17,其与容器总成16联接。支撑壳体12通常包括刚性槽,如金属槽。槽可被夹套以用于控制容器总成16内的培养物的温度。支撑壳体12可为将正确地支撑容器总成16的任何所期望的大小、形状或配置,如下所述。
继续参考图11,容器总成16包括容器18,所述容器具有从上端22延伸到相对的下端24的侧20。上端22终止于上端壁33处,而下端24终止于下端壁34处。容器18还具有接合隔室28的内表面26。隔室28配置成收纳流体。流体可包括生物培养物,所述生物培养物包括细胞或微生物、培养基以及其它营养物和添加剂。也可以使用需要用用气体进行质量传递的任何其它类型的流体。举例来说,流体可以是化学、生物流体、食品或其它流体。对于本文中的实例,流体将作为生物培养物29进行论述。培养物29具有顶表面31。顶部空间37安置在隔室28内,且接合于培养物29的顶表面31与上端壁33之间。
在所描绘的实施例中,容器18包括柔性袋,所述柔性袋由柔性不透水材料组成,如低密度聚乙烯或具有在约0.1mm到约5mm之间的范围内的厚度(其中约0.2mm到约2mm更常见)的其它聚合薄片或膜。也可使用其它厚度。所述材料可以由单层材料组成,或可包括两层或更多层,将所述层密封在一起或分离以形成双壁容器。在将层密封在一起的情况下,材料可包括层压或挤出材料。层压材料包括两个或更多个单独形成的层,所述层随后通过粘附剂固定在一起。可用于本发明中的挤出材料的实例包含可购自犹他洛根州的HyCloneLaboratories公司的HyQ CX3-9和HyQ CX5-14膜。材料可被批准用于与活细胞直接接触并能够使溶液保持无菌。在此实施例中,材料还可如通过电离辐射进行灭菌。在使用前,通常将容器总成16密封闭合并进行灭菌,使得在引入培养物29前,隔室28是无菌的。
在一个实施例中,容器18可包括二维枕头式袋。在另一实施例中,容器18可由按长度切割的聚合材料的连续管状挤出物形成。可将各端缝合闭合,或可在开放式端上方密封面板以形成三维袋。三维袋不仅具有环形侧壁,而且具有二维顶端壁和二维底端壁。三维容器可包括多个离散面板,通常为三个或更多个,且更常见的是四个或六个。每个面板大体上相同且包括容器的侧壁、顶端壁和底端壁的一部分。将每个面板的对应周边边缘缝合在一起。通常使用所属领域中已知的方法(如热能、RF能、声能或其它密封能量)来形成缝隙。
在替代实施例中,面板可以多种不同图案形式形成。在具体以全文引用的方式并入本文中的2002年9月19日公开的美国专利公开第US 2002-0131654A1号中公开了关于一种制造三维袋的方法的其它公开内容。
应了解,容器18可制造成具有实际上任何所期望的大小、形状和配置。举例来说,容器18可形成为具有大小为10升、30升、100升、250升、500升、750升、1,000升、1,500升、3,000升、5,000升、10,000升或其它期望体积的隔室。隔室的大小也可在以上体积中的任何两个之间的范围内。尽管容器18可以是任何形状,但在一个实施例中,容器18具体配置成与支撑壳体12的接收容器18的腔室14大体上互补,使得容器18在腔室14内得到正确地支撑。
尽管在上文所论述的实施例中,容器18被描绘为柔性袋,但在替代实施例中,应了解,容器18可包括任何形式的可折叠容器或半刚性容器。在又其它实施例中,容器18可以是刚性的且可省略支撑壳体12。
继续图11,形成在容器18上的是可以安装在其上的多个不同端口的实例,其中每个端口与隔室28连通。具体来说,安装在上端壁33上的是分别具有与其联接的线39A和B的进入端口40和41。进入端口40和41可用于将气体、培养基、培养物、营养物和/或其它组分递送到容器18中,且可用于从顶部空间37内抽出培养物29或气体。举例来说,在本发明的一些形式中,端口40可用作进入顶部空间37的气体入口,而端口41可用作从顶部空间37的气体出口。可以在容器18上形成任何期望数目的进入端口。传感器端口42形成在容器18的侧20上。传感器50安置在传感器端口42内,以便通常在其下部端处与隔室28连通。应了解,可在容器18上形成任何数目的传感器端口42,每个传感器端口中都安置有对应的传感器50。可使用的传感器50的实例包含温度探针、pH探针、溶解氧气传感器、二氧化碳传感器、细胞质量传感器、营养物传感器以及允许测试或检查培养物或生产物的任何其它传感器。传感器还可呈光学传感器和其它类型的传感器形式。
将鼓泡端口43和44安装在下端壁34上。第一鼓泡器52安装到端口43,且设计成将小气泡递送到培养物29以为培养物29充氧。鼓泡器52可与端口43整体地形成或附接到所述端口。第二鼓泡器54安装到端口44,且设计成将较大气泡递送到培养物29,以用于从培养物29剥离CO2。如此,来自第一鼓泡器52的气泡小于来自第二鼓泡器54的气泡。在本发明的一些形式中,第二鼓泡器54可以是开管或具有带相对较大孔隙的多孔玻璃料的管,而第一鼓泡器52可以是具有带相对较小孔隙的多孔玻璃料的管。第一鼓泡器52还可包括安装在端口43的端上或下端壁34的内表面上以便在端口43上方延伸的穿孔或多孔薄膜。应了解,鼓泡器出现在多种不同配置中,且可视预期的培养物体积、细胞和条件的期望或需要使用任何类型的鼓泡器。
再次注意,容器18可形成有任何期望数目的端口,且所述端口可以形成在容器18上的任何期望位置处。端口可以是相同配置或不同配置,且可以用于多种不同目的,如上文所列出的目的,但不限于此。在具体以全文引用的方式并入本文中的2006年11月30日公开的美国专利公开第2006-0270036号和2006年10月26日公开的美国专利公开第2006-0240546号中公开了端口以及各种探针、传感器和线可如何与所述端口联接的实例。端口还可用于将容器18联接到二级容器、冷凝器系统和其它期望的配件。
还沿着容器18的侧20安置了多个竖直间隔开的气体端口45到47。端口45到47中的每一个形成对应的气体递送系统的一部分,所述系统设计成用于将气体递送到隔室28中以产生气体流充氧/质量传递。图12中描绘了包含气体端口45的气体递送系统1200、60A的放大图。端口45包括安装到容器18上的凸缘62和从其向外突出的管状杆64。杆64接合纵向延伸穿过其的通道66,以便与隔室28连通。环形倒钩68形成在杆64的自由端上,并与管70联接。依次地,管70与无菌连接器72联接。
无菌连接器72包含第一连接器部分74,所述第一连接器部分与第二连接器部分76选择性地配合并流体联接。管状杆75从第一连接器部分74突出,并与管70流体联接。连接器部分74和76中的每一个分别具有密封层78A和B,所述密封层覆盖连接器部分74和76的开口。在将连接器部分74和76联接在一起之后,从连接器部分之间拉出密封层78A和B,以便在连接器部分74与76之间形成无菌流体连接。无菌连接器在所属领域中是已知的。无菌连接器的一个实例是由Pall Corporation生产的 连接器。在内容以全文引用的方式并入本文中的美国专利第6,655,655号中详细描述了PALL连接器。也可使用其它无菌连接器。
连接器。在内容以全文引用的方式并入本文中的美国专利第6,655,655号中详细描述了PALL连接器。也可使用其它无菌连接器。
管80与第二连接器部分76流体联接并延伸到气体供应件82。气体供应件82将穿过无菌连接器72、端口45的气体递送到隔室28中。所述气体可以是氧气,或其可以是含氧气的气体,如空气。取决于所期望的应用,还可使用其它气体。气体供应件82可包括加压罐、压缩机或其它气体供应源。沿着管80安置了气体过滤器84,所述气体过滤器在气体穿过其中时对气体进行灭菌。还沿着管80安装了阀86。阀86用于选择性地停止气体流动通过递送系统60A,并防止容器18内的培养物29通过递送系统60流出。阀86可具有多种不同配置。举例来说,阀86可包括球阀、闸阀、夹紧管80的夹具或用于预期目的的任何其它类型的阀。阀86可以是手动控制的,或可以是电动、液压、气动的等。应了解,阀86可沿着递送系统60定位在任何地方,但通常位于靠近气体端口45处。在一个实施例中,可将阀86安装在邻接端口45的管70上或直接安装在端口45上。
如先前所论述,气体递送系统60的目标是以足够的速度和方向在培养物29或其它可应用的流体的顶表面31上方递送气体流,使得气体流在顶表面31上产生湍流,所述湍流足以为培养物充氧以在其中生长细胞或微生物。术语“上方”广义地旨在包含在任何所期望的方向(如水平、大体上水平、向下倾斜或向上倾斜)上在顶表面31上方行进的气体。气体流不必在线性路径中流动,但可以在圆形路径或涡流中(如绕竖直轴或水平轴)流动,或可沿随机路径流动。气体流可以是层流或湍流,且气体流动的方向、流动速率和/或速度可以是恒定的或可变的。举例来说,气体流可从向下的竖直方向改变为大体上水平的方向。通过将气体端口64放置在容器18的侧20上,这一实施例中的通过通道66排出的气体在隔室28内水平地或大体上水平地行进,使得其可逾越且横穿顶表面31。在一些实施例中,气体流充氧可足以独立地为培养物充氧到生长细胞或微生物所需的程度,而无需任何其它形式的充氧,如鼓泡。在其它实施例中,气体蒸汽充氧可结合鼓泡或其它氧化过程一起使用。
在一个实施例中,气体流充氧能够仅使用空气而无需借助具有大于3且更通常大于5或7的kLa因子的鼓泡来实现氧气的质量传递。气体流充氧还可以在活性培养物内保持稳定的氧浓度设定点,而无需单独鼓泡,所述设定点在空气饱和度的30%到50%的范围内。上述值可以在搅拌釜式反应器中在通过叶轮进行混合的情况下和在其它类型的反应器中而获得。在一个具体实例中,仅使用空气的气体流充氧能够在50%空气饱和度的目标值(868mbar环境压力)下为CHO培养物充氧且将CO2剥离到 容器体积下3.5E+06个细胞/mL的细胞浓度。这时,随后将培养物馈入培养基到满容器体积。值得注意的是,在这种水准的培养密度和容器填充体积下,由气体流充氧提供的充氧和CO2剥离过高;其需要添加与空气混合的N2和CO2以保持目标pH和溶解的O2目标值。
容器体积下3.5E+06个细胞/mL的细胞浓度。这时,随后将培养物馈入培养基到满容器体积。值得注意的是,在这种水准的培养密度和容器填充体积下,由气体流充氧提供的充氧和CO2剥离过高;其需要添加与空气混合的N2和CO2以保持目标pH和溶解的O2目标值。
在操作期间,容器18的隔室28充满了培养物29,使得将顶表面31靠近通道66安置。在一个实施例中,通道66与顶表面31之间的距离D1在约0.75cm到约15cm之间的范围内,其中约1cm至约10cm或约2cm至约5cm更常见。也可使用其它距离。此外,距离D1可基于如容器18的大小、气体的突出角(其中垂直于液体表面的流动是最优的)、气体的流动速率以及气体的表观速度的因子而变化。当测量距离D1时,顶表面31可以是培养物29在搅拌下的最大液波高度,或可以是不搅拌情况下的顶表面31。对于可缩放代表,可以系统的最大额定液体工作体积的每分钟容器体积(VVM)的速率来测量流动速率。通过通道66流出的气体的流动速率通常在约0.06VVM到约0.2VVM之间的范围内,其中约0.08VVM到约0.1VVM或约0.16VVM到约0.18VVM更常见。取决于预期应用也可使用其它流动速率。离开通道66或跨隔室28内的顶表面31行进的气体的速度通常在约25m/秒到约275m/秒之间的范围内,其中约25m/秒到约175m/秒或约30m/秒到约100m/秒更常见。速度可大于25m/秒,且更常见地大于40m/秒、60m/秒、80m/秒或100m/秒。为实现离开通道66的期望气体速度,按隔室12的体积(即容器体积(VV))计,通道66可具有最小的通量离开面积。这一最小的通量离开面积可在约VV(升)/80(升/mm2)到约VV(升)/7.8(升/mm2)之间的范围内,其中约VV(升)/40(升/mm2)到约VV(升)/30(升/mm2)或约VV(升)/8.5(升/mm2)到约VV(升)/6.25(升/mm2)更常见。也可使用其它面积。
如果需要,可以配置端口45,使得在操作期间,杆64成角度,使得将通过其排出的气体略微向下导向顶表面31。举例来说,杆64具有中央纵向轴88。可形成端口45,使得在使用期间,杆64的轴88相对于水平方向倾斜在1°到约10°之间的范围内的角α,使得通过其排出的气体略微向下流到顶表面31。也可使用其它角度。
如先前所论述,气体流充氧对于容器18内的较浅深度的培养物29最有效。在一个实施例中,按容器18的直径(即容器直径(VD))计,顶表面31与下端壁34之间的最大距离D2(见图11)可在广泛范围的距离内,在所述最大距离下,气体流充氧可独立地为培养物29充氧以生长细胞或微生物。举例来说,最大距离D2可在约VD(cm)*0.3到约VD(cm)*0.4之间的范围内。在容器18不具有圆形横截面的情况下,VD可按平均直径计。在一些具体实例中,取决于容器的直径,D2可在约5cm到30cm之间或10cm到100cm之间的范围内。也可使用其它距离。在一些深度下,所述系统可以在不使用鼓泡或其它充氧系统的情况下进行操作。另外,对于一些深度,由于鼓风气体引起的自然循环,可在不使用单独的混合器的情况下在整个培养中实现所期望的充氧。然而,随着深度增加,对培养物进行正确的充氧既需要气体蒸汽充氧,又需要单独的混合系统(如彻底叶轮或摇动),以确保为所有培养物正确地充氧。
随着培养物29的深度增加,即使当混合实现时,传感器50也可以检测到需要额外的充氧。随后,可使用电控制器或手动调节器来调节鼓泡气体流动通过鼓泡器52和54,以用于进一步控制培养物29中的充氧和CO2含量。尽管在使用气体蒸汽充氧时,在较浅深度下可能不需要利用空气或氧气进行鼓泡,但仍可在所有深度下利用氮气(如通过鼓泡器54)进行鼓泡,以控制培养物中的氧气,即剥离由气体蒸汽充氧产生的过量氧气。尽管图11中将气体递送系统60A展示为位于或对应于距离D2的顶部的容器18上的仰角处或附近的唯一气体递送系统,但是两个或更多个气体递送系统60A可以在那个相同仰角处或附近定位并同时进行操作。
可通过进入端口41抽吸通过气体递送系统60A递送到容器18的气体,使得容器18不会过度膨胀。由于相当大量的气体穿过容器18,因此相对于常规系统,培养基的蒸发速率可能更高。如此,反应器系统10可与冷凝器一起进行操作,所述冷凝器与进入端口41联接。在具体以全文引用的方式并入本文中的2011年8月25日公开的美国专利公开第2011/0207218A1号中公开了可与反应器系统10一起使用的冷凝器的一个实例。
培养物29继续以低于通道66的水平生长,直到在培养物29中确定限定的质量密度或其它期望值为止。随后,可关闭阀86并将培养基和其它组分添加到培养物29中,直到顶表面31的水平升高到距图11中所展示的第二气体递送系统60B的操作距离内。随后,启动气体递送系统60B,以再次使气体流通过顶表面31上方,且从而继续进行培养物29的气体流充氧。随后可针对随后的气体递送系统60C继续这一过程。同样地,任何数目的额外气体递送系统可沿容器18的侧20竖直间隔开,以用于在其它仰角处继续进行气体流充氧。
图13示出了根据各种实施例的流体混合系统1300。在各种实施例中,混合系统1300可包括隔室1302,其具有带叶轮1306的驱动轴1304和带气泡路径1310的鼓泡器1308,所述气泡路径展示了气泡从鼓泡器1308上升的轨迹。
在各种实施例中,隔室1302包含1.5的高宽比,且鼓泡器1308相对于单个叶轮1306定位在对于气泡重新夹带为次优的位置中。各种应用可能需要不重新夹带气泡,但更频繁重新夹带使得气泡在混合系统1300中的停留时间增加,这在大多数情况下是优选的。
图14示出了根据各种实施例的流体混合系统1400。在各种实施例中,混合系统1400可包括隔室1402,所述隔室具有驱动轴1404,其安置在所述隔室中;第二叶轮1406和第一叶轮1408,其附连到驱动轴1404;和鼓泡器1410,其利用自其延伸的气泡路径1412附连到隔室1402的底部。
在各种实施例中,相对于驱动轴1404以及第一和第二叶轮1406、1408位置的鼓泡器1410位置对于气泡重新夹带是次优的。当需要额外混合且不需要增加气泡停留时间时,这种系统有时是优选的。然而,在大多数应用中,可选择鼓泡器1410和叶轮1406、1408的相对位置以更改气泡路径1412并产生气泡的更长停留时间。
图15示出了根据各种实施例的流体混合系统1400。在各种实施例中,混合系统1500可包括隔室1502;驱动轴1504,其安置在隔室内;第一叶轮1506和第二叶轮1508,其附连到驱动轴1404;鼓泡器1510;和气泡路径1512。
在各种实施例中,鼓泡器1510以及第一和第二叶轮1506、1508的相对位置对于气泡重新夹带是次优的。存在较短的气泡停留时间是最优的一些应用,但在大多数情况下,这不是所期望的配置。
图16示出了根据各种实施例的流体混合系统1600。在各种实施例中,混合系统1600可包括隔室1602;驱动轴1604,其安置在隔室1402内;第一叶轮1606和第二叶轮1608,其附连到驱动轴1404;鼓泡器1610;和气泡路径1612,所述气泡路径描绘了源自鼓泡器1410的气泡的上升流动。
在各种实施例中,优化图16的流体混合系统1600以用于重新夹带。选择鼓泡器1410以及第一和第二叶轮1606、1608的相对位置以影响气泡路径1612,从而增加气泡在混合系统1600内的停留时间。在大多数应用中,这是一种理想的布置。
图17示出了用于实验目的的鼓泡器布局1700。鼓泡器布局1700包括叶轮尖端扫掠1702、鼓泡器位置1704和隔室1706。
图17建立了一个实验,其中驱动轴(未展示)朝着隔室1706的侧壁偏移,并且一次操作各种鼓泡器位置1704以确定最优的气泡分散图案。在各种实施例中,隔室1706的拐角通过用作挡板来用于增大气泡分布。
图18A到18F示出了图17中所展示的鼓泡器位置1704中的每一个的气泡分布图案。变灰的鼓泡器位置指示正在操作的鼓泡器。其它鼓泡器被关闭。举例来说,鼓泡器位置1在图18A中处于操作中,而其它鼓泡器位置被关闭。
图19示出了图17中所展示的鼓泡器位置1704的性能。x轴指示使用中的鼓泡器位置1704,而y轴展示经过的时间。实线展示第一释放的气泡到达表面所花费的时间(以秒为单位),且虚线展示在停止流向鼓泡器的气体之后95%气泡到达表面所花费的时间。一般来说,使气泡在流体中停留更久意味着更多溶解的氧气可以进入流体中并养育细胞,这对于大多数应用是优选的。当产生可缩放系统时,增加或减少气泡停留时间以匹配两个或更多个混合系统之间的kLa将为商业规模生产提供更好的预测模型。如先前所论述,能够更改鼓泡器和叶轮位置以改变重新夹带性质可能是有帮助的。
图20示出了图17中所展示的鼓泡器位置1704的性能。x轴指示使用中的鼓泡器位置1704,且y轴展示所获得的归一化kLa值。一般来说,较高的kLa值是优选的。在可缩放系统中,可选择鼓泡器位置以尝试在具有不同几何形状和体积的两个或更多个混合系统之间匹配kLa值。
图21示出了使用本申请中所描述的鼓泡方法和系统的混合系统体积与现有技术的鼓泡系统之间的比较数据。y轴上描绘了kLa,且x轴上描绘了每分钟每容器体积的流动体积。清晰地展示出,现有技术的鼓泡系统和方法在50升到2000升的系统之间不会产生类似kLa值。然而,本文中所公开的鼓泡器在具有不同体积的系统之间产生极其类似的kLa值。
使用上述方法,缩放鼓泡器的孔径和计数,且通过将具有FRIT+开管的系统与具有FRIT+DHS的系统(上文所公开的鼓泡器系统和方法)进行比较来凭经验测量kLa。
这种方法跨规模提高缩放性能,从而跨规模将kLa的最大标准偏差从20%减小到8.6%,并跨规摸将采用开管或DHS的kLa的平均标准偏差从16%减小到6%。
图22示出了在给定每体积功率输入下跨体积的混合一致性。用于产生图22中所见的数据的混合系统200是图2和本文件的其它地方所描绘的系统。所展示的图表来自从以下获取的数据:高宽比为2.5的50升容器和3个叶轮,高宽比为2.5的500升容器和3个叶轮以及高宽比为2.5的5000升容器和3个叶轮。叶轮直径在每个规模上都不相同,叶轮直径与容器的宽度比也不相同。如可看见,在给定的每体积功率下,t95混合时间跨规模保持恒定。
图23示出了一张表,所述表展示跨规摸50升、100升、250升、500升、1000升和2000升系统的恒定或接近恒定的叶轮尖端速度和每体积功率。叶轮的直径和数目已改变以适应不同大小的系统。
图24示出了根据各种实施例的在具有不同体积的生物反应器之间匹配流体混合特性的方法2400。框2402包含选择具有操作参数集的第一生物反应器的步骤,第一生物反应器包括:第一生物处理容器,其具有第一端、第二端和侧壁;和第一可配置混合总成,其悬挂在第一生物处理容器的第一端与第二端之间。框2404包含选择具有第一直径的第一叶轮的步骤。框2406包含将第一叶轮附接到可配置混合总成的步骤,其中选择第一直径和附接位置以符合操作参数。框2408包含选择第二生物反应器的步骤,所述第二生物反应器包括:第二生物处理容器,其具有第一端、第二端和侧壁,其中第二生物处理容器与第一生物处理容器的体积不同;和第二可配置混合总成,其悬挂在第二生物处理容器的第一端与第二端之间。框2410包含选择具有第二直径的第二叶轮的步骤,所述第二直径与第一直径不同。框2412包含将第二叶轮附接到第二可配置混合总成的步骤,其中选择第二直径和第二附接位置以将操作参数集匹配到百分之五以内,其中操作参数集包含每体积功率和叶轮尖端速度。
图25示出了根据各种实施例的在具有不同体积的生物反应器之间匹配流体混合特性的方法2500。框2502包含选择具有操作参数的第一生物反应器的步骤,所述第一生物反应器包括:第一生物处理容器,其具有第一端、第二端和侧壁;和第一可配置混合总成,其悬挂在第一生物处理容器的第一端与第二端之间。框2504包含选择具有第一数目的孔的第一鼓泡器的步骤,其中,孔具有第一直径,其中选择第一数目和第一直径以符合操作参数,其中将第一鼓泡器附连到第一端。框2506包含选择第二生物反应器的步骤,所述第二生物反应器包括:第二生物处理容器,其具有第一端、第二端和侧壁,其中第二生物处理容器的高宽比与第一生物处理容器的高宽比不同;和第二可配置混合总成,其悬挂在第二生物处理容器的第一端与第二端之间。框2508包含选择具有第二数目的孔的第二鼓泡器的步骤,其中孔具有第二直径且将第二鼓泡器附连到第二生物处理容器的第一端,其中第二数目的孔与第一数目的孔不同且第二直径与第一直径不同,其中选择第二数目的孔和第二直径以将操作参数匹配到百分之五以内,其中操作参数是kLa。
一系列预测和实际数据被收集并呈现于图26、27和28中。以下是一种预测所需孔径以确保跨具有不同体积的生物反应器进行缩放的方式。
1.使用基于经验数据和文献的回归,来预测以下:
a.根据孔径和流动速率得出的气泡大小(内部经验数据回归)
b.气泡终极速度(Talaia,2007年,液柱中气泡上升的终极速度,还通过测量室内气泡速度进行了验证)。
c.基于液柱高度除以气泡终极速度的停留时间
2.kLa分数是基于:

图26示出了传统生物反应器上跨规模的预测性Kscore比较数据。
图27示出了传统生物反应器上跨规模的实际kLa比较数据。
图28示出了在本文中所公开的一些实施例上的跨规模的预计Kscore比较数据。
使用本文中所公开的系统和方法,操作参数可跨适应不同体积的混合系统保持恒定。当从测试或工作台规模发展到商业规模时,最重要的方面是能够容易预测生物反应器的生长条件。本文中的可缩放系统允许用户通过调整鼓泡器设计、驱动系统和顶部空间气流系统的各个方面来产生这种系统,其中跨系统的组件可能完全不同,但会产生相同或类似的结果。应注意,所有系统彼此相互作用,且在进行选择时,需要考虑其它方面。举例来说,如果需要增加气泡停留时间,那么可更改驱动系统以重新夹带气泡。如果需要减少CO2积累,那么可能会增加跨顶部空间的额外鼓泡和气流。到目前为止,用户需要确定更重要的度量标准(剪切力、每体积功率或kLa)并设计尺寸上相同的可缩放系统(容器高宽比、叶轮直径与容器宽度/直径等)。利用本公开发明,在理解各种系统如何相互影响的情况下,各种操作参数可以保持恒定。
虽然结合各种实施例来描述本发明教示,但是并不旨在将本发明教示限制于这类实施例。相反,如所属领域的技术人员应了解,本发明教示涵盖各种替代例、修改以及等效物。
此外,在描述各种实施例时,本说明书可能已经以特定的步骤顺序呈现方法和/或过程。然而,在方法或过程不依赖于本文中所阐述的特定的步骤次序的程度上,方法或过程不应限于所描述的特定的步骤顺序。如所属领域的普通技术人员将了解,其它步骤顺序可以是可能的。因此,本说明书中所阐述的特定步骤次序不应被解释为对权利要求的限制。另外,针对方法和/或过程的权利要求不应限于以书写的次序进行其步骤,且所属领域的技术人员将易于了解,顺序可以变化并且仍保持在各种实施例的精神和范围内。
Claims (32)
1.一种从测试过渡到商业生产的可缩放生物反应器系统,其包括:
第一生物反应器,其包括:
第一生物处理容器,其具有第一端、第二端和侧壁;
第一可配置混合总成,其悬挂在所述第一生物处理容器的所述第一端与所述第二端之间;和
第一叶轮,其具有第一直径,所述第一叶轮在第一位置附接到所述第一可配置混合总成,其中选择所述第一直径和所述第一位置以达成操作参数集;
第二生物反应器,其包括
第二生物处理容器,其具有第一端、第二端和侧壁,其中所述第二生物处理容器与所述第一生物处理容器的体积不同;
第二可配置混合总成,其悬挂在所述第二生物处理容器的所述第一端与所述第二端之间;和
第二叶轮,其具有与所述第一直径不同的第二直径,所述第二叶轮在第二位置附接到所述第二可配置混合总成,其中选择所述第二直径和所述第二位置以匹配所述操作参数集且所述操作参数包含每体积功率和叶轮尖端速度。
2.根据权利要求1所述的可缩放生物反应器系统,其中所述第一生物处理容器包含第一鼓泡器,其附连到所述第一生物处理容器的所述第一端且具有第一数目的孔,并且每个孔具有第一直径,且所述第二生物处理容器包含第二鼓泡器,其附连到所述第二生物处理容器的所述第一端且具有第二数目的孔,并且每个孔具有第二直径。
3.根据权利要求2所述的可缩放生物反应器系统,其中所述第一数目的孔与所述第二数目的孔不同,所述第一直径与所述第二直径不同,且选择所述孔数目和孔大小使得所述第一和第二生物反应器达到相同的kLa。
4.根据权利要求2所述的可缩放生物反应器系统,其中选择所述第一位置和第二位置以重新夹带从所述第一和第二鼓泡器上升的气泡。
5.根据权利要求1所述的可缩放生物反应器系统,其中所述第一生物反应器包含第一顶部空间气流器件,且所述第二生物反应器包含第二顶部空间气流器件,并且每个横流鼓泡器操作以跨顶部空间提供不同的气流速率以在所述第一生物反应器与所述第二生物反应器之间将液相的CO2去除率匹配到百分之五内。
6.根据权利要求1所述的可缩放生物反应器系统,其中所述第二生物反应器包含第三叶轮,其具有与所述第一直径不同的第三直径,其中所述第三叶轮附接到所述第二可配置混合总成,并且选择所述第三直径和第三附接位置以及所述第二直径和所述第二位置以匹配所述操作参数集。
7.根据权利要求1所述的可缩放生物反应器系统,其中所述第一叶轮直径与所述第一生物处理容器宽度的比率与所述第二叶轮直径与所述第二生物处理容器宽度的比率不同。
8.根据权利要求1所述的可缩放生物反应器系统,其中所述操作参数集进一步包含总流体流和T95混合时间。
9.根据权利要求1所述的可缩放生物反应器系统,其中基于细胞的最优生长条件来选择所述操作参数集。
10.根据权利要求9所述的可缩放生物反应器系统,其中所述细胞是真核的且对随着所述叶轮尖端速度增大而增大的剪切力敏感。
11.根据权利要求1所述的可缩放生物反应器系统,其中所述第一生物处理容器是在0.1升与50升之间的工作台规模体积,并且所述第二生物处理容器是在50升与10,000升之间的商用体积。
12.根据权利要求1所述的可缩放生物反应器系统,其中所述第一和第二生物处理容器的形状为矩形,且所述第一和第二可配置混合总成偏离中心轴线以增大总流体流。
13.根据权利要求1所述的可缩放生物反应器系统,其中所述第一和第二生物处理容器的高宽比大于1.5。
14.根据权利要求1所述的可缩放生物反应器系统,其中所述第一生物处理容器具有在1.5与2之间的高宽比,且所述第二生物处理容器具有在1.75与4之间的高宽比。
15.一种在具有不同体积的生物反应器之间匹配流体混合特性的方法,其包括:
选择具有操作参数集的第一生物反应器,所述第一生物反应器包括:
第一生物处理容器,其具有第一端、第二端和侧壁;和
第一可配置混合总成,其悬挂在所述第一生物处理容器的所述第一端与所述第二端之间;
选择具有第一直径的第一叶轮;
将所述第一叶轮附接到所述可配置混合总成,其中选择所述第一直径和所述附接位置以符合所述操作参数;
选择第二生物反应器,其包括:
第二生物处理容器,其具有第一端、第二端和侧壁,其中所述第二生物处理容器与所述第一生物处理容器的体积不同;和
第二可配置混合总成,其悬挂在所述第二生物处理容器的所述第一端与所述第二端之间;
选择具有第二直径的第二叶轮,所述第二直径与所述第一直径不同;
将所述第二叶轮附接到所述第二可配置混合总成,其中选择所述第二直径和所述第二附接位置以匹配所述操作参数集,其中所述操作参数集包含每体积功率和叶轮尖端速度。
16.根据权利要求15所述的方法,其进一步包括以下步骤:选择具有与所述第一直径不同的所述第三直径的第三叶轮,并将所述第三叶轮附接到所述第二可配置混合总成,其中选择所述第三直径和所述第三附接位置以及所述第二直径和所述第二附接位置以匹配所述操作参数集。
17.根据权利要求16所述的方法,其中添加所述第三叶轮的所述步骤降低了保持所述第一和第二生物反应器中的每体积功率和叶轮尖端速度所需的第二和第三叶轮尖端速度。
18.根据权利要求15所述的方法,其中所述第一叶轮直径与所述第一生物处理容器宽度的比率与所述第二叶轮直径与所述第二生物处理容器宽度的比率不同。
19.根据权利要求15所述的方法,其中所述操作参数集进一步包含总流体流和T95混合时间。
20.根据权利要求19所述的方法,其中基于细胞的最优生长条件来选择所述操作参数集。
21.根据权利要求20所述的方法,其中所述细胞是真核的且对随着所述叶轮尖端速度增大而增大的剪切力敏感。
22.根据权利要求15所述的方法,其中所述第一生物处理容器是在0.1升与50升之间的工作台规模体积,并且所述第二生物处理容器是在50升与10,000升之间的商用体积。
23.根据权利要求22所述的方法,其中所述第一和第二生物处理容器的形状为矩形,且所述第一和第二可配置混合总成偏离中心轴线以增大总流体流。
24.根据权利要求23所述的方法,其中所述第一和第二生物处理容器的高宽比大于1.5。
25.一种在具有不同体积的生物反应器之间匹配流体混合特性的方法,其包括:
选择具有操作参数的第一生物反应器,所述第一生物反应器包括:
第一生物处理容器,其具有第一端、第二端和侧壁;和
第一可配置混合总成,其悬挂在所述第一生物处理容器的所述第一端与所述第二端之间;
选择具有第一数目的孔的第一鼓泡器,其中所述孔具有第一直径,其中选择所述第一数目和第一直径以符合所述操作参数,其中所述第一鼓泡器附连到所述第一端;
选择第二生物反应器,其包括:
第二生物处理容器,其具有第一端、第二端和侧壁,其中所述第二生物处理容器的高宽比与所述第一生物处理容器的高宽比不同;和
第二可配置混合总成,其悬挂在所述第二生物处理容器的所述第一端与所述第二端之间;
选择具有第二数目的孔的第二鼓泡器,其中所述孔具有第二直径,且
所述第二鼓泡器附连到所述第二生物处理容器的所述第一端,
其中所述第二数目的孔与第一数目的孔不同且所述第二直径与第一直径不同,其中选择所述第二数目的孔和第二直径以使所述操作参数匹配在百分之五内,其中所述操作参数为kLa。
26.根据权利要求25所述的方法,其中所述第一生物反应器包含第一顶部空间气流器件,且所述第二生物反应器包含第二顶部空间气流器件,并且每个顶部空间气流器件操作以跨顶部空间提供不同气流速率以匹配所述操作参数。
27.根据权利要求25所述的方法,其进一步包括将第二叶轮附接到所述第二混合总成的所述步骤,其中所述第二叶轮配置成重新夹带从所述第二鼓泡器上升的气泡,其中选择所述鼓泡器和第二叶轮的所述位置以及所述第二数目和第二孔径以匹配所述操作参数。
28.根据权利要求25所述的方法,其中所述第一生物处理容器的所述高宽比在1.5与2之间,且所述第二生物处理容器的所述高宽比在1.75与4之间。
29.根据权利要求25所述的方法,其中所述第一生物处理容器是在0.1升与50升之间的工作台体积,并且所述第二生物处理容器是在50升与10,000升之间的商用体积。
30.根据权利要求25所述的方法,其中所述第一和第二生物处理容器的形状为矩形,并且所述第一和第二混合总成偏离中心轴线以达成所期望的kLa。
31.根据权利要求25所述的方法,其中kLa是指O2。
32.根据权利要求25所述的方法,其中kLa是指CO2。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201862618215P | 2018-01-17 | 2018-01-17 | |
| US62/618,215 | 2018-01-17 | ||
| US201862670934P | 2018-05-14 | 2018-05-14 | |
| US62/670,934 | 2018-05-14 | ||
| US201862712343P | 2018-07-31 | 2018-07-31 | |
| US62/712,343 | 2018-07-31 | ||
| PCT/US2019/012120 WO2019143476A1 (en) | 2018-01-17 | 2019-01-03 | System and method for cell culture scaling |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111699240A true CN111699240A (zh) | 2020-09-22 |
Family
ID=65199609
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980009086.5A Pending CN111699240A (zh) | 2018-01-17 | 2019-01-03 | 用于细胞培养缩放的系统和方法 |
| CN202411081171.1A Pending CN118767728A (zh) | 2018-01-17 | 2019-01-03 | 包括具有叶轮附件的螺旋混合组件的流体混合系统和使用方法 |
| CN201980009084.6A Pending CN111615553A (zh) | 2018-01-17 | 2019-01-03 | 可配置流体混合系统壳体和支撑硬件 |
| CN201980009126.6A Active CN111615554B (zh) | 2018-01-17 | 2019-01-03 | 包括具有叶轮附件的螺旋混合组件的流体混合系统和使用方法 |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202411081171.1A Pending CN118767728A (zh) | 2018-01-17 | 2019-01-03 | 包括具有叶轮附件的螺旋混合组件的流体混合系统和使用方法 |
| CN201980009084.6A Pending CN111615553A (zh) | 2018-01-17 | 2019-01-03 | 可配置流体混合系统壳体和支撑硬件 |
| CN201980009126.6A Active CN111615554B (zh) | 2018-01-17 | 2019-01-03 | 包括具有叶轮附件的螺旋混合组件的流体混合系统和使用方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (6) | US11352598B2 (zh) |
| EP (3) | EP3740560A1 (zh) |
| JP (7) | JP7223012B2 (zh) |
| CN (4) | CN111699240A (zh) |
| WO (3) | WO2019143477A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112246173A (zh) * | 2020-09-29 | 2021-01-22 | 广州市爱百伊生物技术有限公司 | 一种配料罐及生产线 |
| TWI822173B (zh) * | 2021-08-17 | 2023-11-11 | 日商日揮股份有限公司 | 運算裝置、控制裝置、培養系統以及培養系統的設計方法 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| USD894377S1 (en) | 2019-01-03 | 2020-08-25 | Life Technologies Corporation | Tube management assembly |
| US11535421B2 (en) * | 2019-12-30 | 2022-12-27 | Global Life Sciences Solutions Usa Llc | System and method for packaging a bioprocessing bag and associated components, and packaging for a bioprocessing bag |
| WO2021158555A1 (en) | 2020-02-03 | 2021-08-12 | Life Technologies Corporation | Fluid mixing systems with modular impellers and related methods |
| US12005403B2 (en) * | 2020-08-06 | 2024-06-11 | Signature Science, Llc | Mixing chamber apparatus for high-volume sampling |
| EP4225884A1 (en) * | 2020-10-08 | 2023-08-16 | Global Life Sciences Solutions USA LLC | Bioprocessing system and apparatus for reducing cell shear in a bioprocessing system |
| US11649654B2 (en) * | 2020-10-12 | 2023-05-16 | Cytiva Us Llc | Tank with door locking mechanism |
| EP4323093A1 (en) * | 2021-04-16 | 2024-02-21 | EMD Millipore Corporation | Single use flexible sparger |
| CN117597189A (zh) * | 2021-06-30 | 2024-02-23 | 康宁股份有限公司 | 用于台式生物反应器的宏观鼓泡器 |
| CN114210520B (zh) * | 2021-12-08 | 2023-03-14 | 佛山市亨力豪机械有限公司 | 一种淋胶机 |
| CN114917784A (zh) * | 2022-04-15 | 2022-08-19 | 哈尔滨工业大学 | 一种用于熔融石英半球谐振子的抗腐蚀搅拌装置 |
| CN116983871B (zh) * | 2023-09-20 | 2023-12-01 | 常州登达适医疗科技有限公司 | 一种气液混合搅拌装置及其搅拌方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102112595A (zh) * | 2008-08-06 | 2011-06-29 | 普莱克斯技术有限公司 | 用于控制哺乳动物细胞培养过程的系统和方法 |
| CN102307984A (zh) * | 2009-02-09 | 2012-01-04 | 英国龙沙生物医药股份有限公司 | 用于培养哺乳动物细胞的生物反应器 |
| US20130288346A1 (en) * | 2011-01-11 | 2013-10-31 | Xcellerex Inc. | Linearly scalable single use bioreactor system |
| US20150118753A1 (en) * | 2012-04-18 | 2015-04-30 | Life Technologies Corporation | Methods and apparatus for gas stream mass transfer with a liquid |
| US20170183617A1 (en) * | 2015-12-29 | 2017-06-29 | Life Technologies Corporation | Fluid mixing system with laterally displaced flexible drive lines and methods of use |
| US20170349874A1 (en) * | 2016-06-03 | 2017-12-07 | Lonza Ltd | Single Use Bioreactor |
| US20180010082A1 (en) * | 2016-06-03 | 2018-01-11 | Lonza Ltd | Bioreactor With Higher Agitation Rates |
Family Cites Families (84)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1752833A (en) | 1930-04-01 | Thexla u | ||
| US659345A (en) | 1900-04-21 | 1900-10-09 | Clifford E Ivins | Beater. |
| US1778188A (en) | 1927-07-15 | 1930-10-14 | Guy Walter De Motte | Ice-cream attachment for mechanical refrigerators |
| US1711114A (en) | 1928-04-21 | 1929-04-30 | Joseph W Hunt | Agitator |
| US1954093A (en) | 1931-09-11 | 1934-04-10 | Mark W Nelson | Flexible shaft paint mixing apparatus or device |
| US1898724A (en) | 1931-09-23 | 1933-02-21 | Albert R Gifford | Means for making ice cream in an electric refrigerator |
| FR782935A (fr) | 1934-09-29 | 1935-07-05 | Pompe, compresseur ou machines similaires centrifuges à pales orientables | |
| US2552057A (en) | 1948-12-11 | 1951-05-08 | Abbott Lab | Mixing apparatus |
| US2896926A (en) | 1956-01-10 | 1959-07-28 | Chapman Harold Eric | Device for mixing or treating fluids or free-flowing powders |
| NL272530A (zh) | 1960-12-15 | |||
| LU39997A1 (zh) | 1961-04-10 | |||
| US3559962A (en) | 1968-06-10 | 1971-02-02 | Binks Res & Dev | Stirring device |
| US3692427A (en) | 1970-07-13 | 1972-09-19 | Colortex Sa | High speed mixing impeller |
| US4083653A (en) | 1975-11-07 | 1978-04-11 | Stiffler Hugh A | Stirring device |
| US4355906A (en) | 1981-04-03 | 1982-10-26 | Bellco Glass Inc. | Stirring apparatus for cell culture |
| USD273709S (en) | 1981-06-15 | 1984-05-01 | Hollister Incorporated | Urinary drainage bag |
| US4722608A (en) | 1985-07-30 | 1988-02-02 | General Signal Corp. | Mixing apparatus |
| US4712922A (en) | 1986-01-03 | 1987-12-15 | Core Industries Inc. | Material mixing apparatus |
| USD336034S (en) | 1990-11-05 | 1993-06-01 | Rebilas Richard R | Condiment bottle refilling container |
| JP3177551B2 (ja) | 1993-04-06 | 2001-06-18 | カワセインダストリィー株式会社 | 混合機及びその攪拌装置 |
| US5411331A (en) | 1993-06-01 | 1995-05-02 | Westinghouse Electric Corporation | Device for promoting gravity flow of non-free-flowing solids |
| US5454797A (en) | 1994-08-12 | 1995-10-03 | Haswell; John N. | Combined pelvic tray, workstation and fluid collection device |
| USD373709S (en) | 1995-08-11 | 1996-09-17 | Shyh-Shyang Leu | Saucer |
| EP1716885A3 (en) | 1997-05-09 | 2006-11-15 | Pall Corporation | Connector assemblies, fluid systems, and methods for making a connection |
| US5885001A (en) | 1997-06-13 | 1999-03-23 | Cadence Technologies, Inc. | Agitator assembly with a retractable blade assembly |
| FR2766091A1 (fr) | 1997-07-18 | 1999-01-22 | Transgene Sa | Composition antitumorale a base de polypeptide immunogene de localisation cellulaire modifiee |
| US6083587A (en) | 1997-09-22 | 2000-07-04 | Baxter International Inc. | Multilayered polymer structure for medical products |
| US5896989A (en) | 1998-02-20 | 1999-04-27 | Bracco Research Usa | Flexible medical container packaging |
| US5941636A (en) | 1998-03-19 | 1999-08-24 | Lu; Chen-Yi | Mixer having mixing blades capable of expanding automatically |
| USD439328S1 (en) | 1999-03-03 | 2001-03-20 | Plm Ab | Container for infusion and other liquids |
| US20030053838A1 (en) | 1999-03-22 | 2003-03-20 | Mike Whitney | Geometric and perforated paint mixer and paint roller cleaner |
| JP4369121B2 (ja) | 2001-02-06 | 2009-11-18 | リーブテック,インコーポレイテッド | 容器内に密封された材料を滅菌状態下で混合するための装置及び方法 |
| US20020131654A1 (en) | 2001-03-19 | 2002-09-19 | Smith Sidney T. | Large volume flexible container |
| US6659132B2 (en) | 2001-03-19 | 2003-12-09 | Baxter International Inc. | Gas permeable sterile closure |
| US7025318B2 (en) * | 2001-03-19 | 2006-04-11 | Baxter International Inc. | Container support |
| US6670171B2 (en) | 2001-07-09 | 2003-12-30 | Wheaton Usa, Inc. | Disposable vessel |
| US20030077466A1 (en) | 2001-10-19 | 2003-04-24 | Smith Sidney T. | Multilayered polymer structure |
| US7284579B2 (en) | 2003-03-28 | 2007-10-23 | Hyclone Laboratories, Inc. | Fluid dispensing bins and related methods |
| US7441940B2 (en) | 2003-10-23 | 2008-10-28 | Sport Usa, Llc | Collapsible mixing wand |
| US20050239198A1 (en) | 2004-04-27 | 2005-10-27 | Baxter International, Inc. | Stirred-tank reactor system |
| USD679023S1 (en) | 2004-07-19 | 2013-03-26 | Thermotek, Inc. | Foot wrap |
| US20060196501A1 (en) | 2005-03-02 | 2006-09-07 | Hynetics Llc | Systems and methods for mixing and sparging solutions and/or suspensions |
| US7682067B2 (en) | 2005-04-22 | 2010-03-23 | Hyclone Laboratories, Inc. | Mixing systems and related mixers |
| US8603805B2 (en) | 2005-04-22 | 2013-12-10 | Hyclone Laboratories, Inc. | Gas spargers and related container systems |
| US7879599B2 (en) | 2005-04-22 | 2011-02-01 | Hyclone Laboratories, Inc. | Tube ports and related container systems |
| WO2007011745A2 (en) | 2005-07-14 | 2007-01-25 | Randy Kaas | Whisk for attachment to electric mixer |
| EP1776998B1 (en) | 2005-10-21 | 2008-07-23 | Abb Research Ltd. | Mixing device |
| US7487688B2 (en) | 2006-03-20 | 2009-02-10 | Hyclone Laboratories, Inc. | Sampling ports and related container systems |
| DE102006022306B4 (de) | 2006-05-11 | 2009-06-25 | Sartorius Stedim Biotech Gmbh | Vibrationsmischer |
| DE202006009493U1 (de) | 2006-06-14 | 2007-07-26 | Monolith GmbH Bürosysteme | Rollenschneidgerät zum Beschneiden von Blattgut |
| US8439554B2 (en) | 2006-07-13 | 2013-05-14 | Randy Kaas | Whisk attachment |
| US8008065B2 (en) | 2006-08-02 | 2011-08-30 | Finesse Solutions, Llc. | Disposable bioreactor vessel port |
| US20080116012A1 (en) * | 2006-11-09 | 2008-05-22 | Ferguson Brock E | Platform Lift for a Vehicle |
| USD664260S1 (en) | 2007-04-10 | 2012-07-24 | Thermotek, Inc. | Calf wrap |
| DE102007061664B4 (de) | 2007-12-18 | 2009-11-19 | Sartorius Stedim Biotech Gmbh | Behälter mit flexibler Wandung |
| EP2274085B2 (en) | 2008-03-19 | 2019-08-14 | Sartorius Stedim Biotech GmbH | Method of mixing comprising a magnetic stirrer |
| EP2402073B1 (de) | 2008-04-17 | 2013-01-23 | Sartorius Stedim Biotech GmbH | Flexibler Beutel mit einer Mischvorrichtung |
| US8381780B2 (en) * | 2008-05-22 | 2013-02-26 | Xcellerex, Inc. | Lift and support assemblies and methods for collapsible bag containers of vessels and bioreactors |
| DE102008025508A1 (de) | 2008-05-28 | 2009-12-03 | Sartorius Stedim Biotech Gmbh | Mischsystem |
| DE102008025507A1 (de) | 2008-05-28 | 2009-12-03 | Sartorius Stedim Biotech Gmbh | Mischsystem |
| DE102008058338B4 (de) | 2008-11-20 | 2010-11-11 | Sartorius Stedim Biotech Gmbh | Rührer für Bioreaktor |
| US8348737B2 (en) | 2009-05-21 | 2013-01-08 | Everett Page | Method for conducting an online contest |
| US8506198B2 (en) | 2010-02-01 | 2013-08-13 | Hyclone Laboratories, Inc. | Self aligning coupling for mixing system |
| US8641314B2 (en) | 2010-02-01 | 2014-02-04 | Hyclone Laboratories, Inc. | Quick coupling for drive shaft |
| US8455242B2 (en) | 2010-02-22 | 2013-06-04 | Hyclone Laboratories, Inc. | Mixing system with condenser |
| SE534819C2 (sv) | 2010-05-06 | 2012-01-10 | Itt Mfg Enterprises Inc | Omröraraggregat för rötkammare |
| US8960486B2 (en) * | 2010-06-16 | 2015-02-24 | Life Technologies Corporation | Fluid mixing system with hangers |
| WO2012071673A1 (en) | 2010-11-30 | 2012-06-07 | Miteco Ag | Stirring installation and method |
| EP2758158B1 (en) | 2011-09-16 | 2019-08-21 | GE Healthcare Bio-Sciences Corp. | Mixing system and mixing method |
| WO2013049692A1 (en) | 2011-09-30 | 2013-04-04 | Hyclone Laboratories, Inc. | Container with film sparger |
| US10435658B2 (en) | 2011-10-25 | 2019-10-08 | Life Technologies Corporation | Fluid mixing systems with adjustable mixing element |
| WO2013151733A1 (en) | 2012-04-06 | 2013-10-10 | Hyclone Laboratories, Inc. | Fluid mixing system with flexible drive line and foldable impeller |
| CN202606066U (zh) | 2012-04-25 | 2012-12-19 | 林美复合材料(苏州)有限公司 | 一种搅拌机 |
| CA2922967C (en) | 2013-09-16 | 2022-05-03 | Genentech, Inc. | Bioreactors with multiple or adjustable-position agitator designs |
| WO2016065249A1 (en) * | 2014-10-24 | 2016-04-28 | Life Technologies Corporation | Acoustically settled liquid-liquid sample purification system |
| US9714405B2 (en) * | 2015-04-14 | 2017-07-25 | Pall Corporation | Bioprocessing container tube system and method of use |
| KR102485147B1 (ko) | 2015-07-06 | 2023-01-06 | 엘지전자 주식회사 | 변형 가능한 디스플레이 장치 및 그의 동작 방법 |
| US9683208B2 (en) | 2015-07-31 | 2017-06-20 | Ernest Louis Stadler | Horizontal single use pressurizable modular multi-agitator microbial fermentator |
| US10836989B2 (en) | 2015-10-16 | 2020-11-17 | Global Life Sciences Solutions Usa Llc | Disposable container, mixing system and packaging |
| USD830544S1 (en) | 2016-05-17 | 2018-10-09 | Detectachem Llc | Receptacle |
| USD857188S1 (en) | 2016-09-29 | 2019-08-20 | Mine Survival, Inc. | Rebreather device |
| USD824042S1 (en) | 2016-11-10 | 2018-07-24 | Viacyte, Inc. | Perforated cell encapsulation device |
| USD828653S1 (en) | 2016-12-14 | 2018-09-11 | Brandon Penland | Treatment applicator |
| USD870315S1 (en) | 2017-11-09 | 2019-12-17 | Hemocue Ab | Cuvette |
-
2019
- 2019-01-03 WO PCT/US2019/012124 patent/WO2019143477A1/en unknown
- 2019-01-03 US US16/238,618 patent/US11352598B2/en active Active
- 2019-01-03 JP JP2020539093A patent/JP7223012B2/ja active Active
- 2019-01-03 WO PCT/US2019/012120 patent/WO2019143476A1/en unknown
- 2019-01-03 EP EP19701745.2A patent/EP3740560A1/en active Pending
- 2019-01-03 EP EP19701410.3A patent/EP3740559A1/en active Pending
- 2019-01-03 JP JP2020539092A patent/JP7241761B2/ja active Active
- 2019-01-03 CN CN201980009086.5A patent/CN111699240A/zh active Pending
- 2019-01-03 US US16/238,591 patent/US11584910B2/en active Active
- 2019-01-03 US US16/238,656 patent/US11293003B2/en active Active
- 2019-01-03 EP EP19702136.3A patent/EP3740561A1/en active Pending
- 2019-01-03 JP JP2020539064A patent/JP2021511033A/ja active Pending
- 2019-01-03 CN CN202411081171.1A patent/CN118767728A/zh active Pending
- 2019-01-03 WO PCT/US2019/012126 patent/WO2019143478A1/en unknown
- 2019-01-03 CN CN201980009084.6A patent/CN111615553A/zh active Pending
- 2019-01-03 CN CN201980009126.6A patent/CN111615554B/zh active Active
-
2022
- 2022-01-24 US US17/582,257 patent/US20220145231A1/en active Pending
- 2022-04-22 US US17/726,987 patent/US20220243165A1/en active Pending
- 2022-10-31 US US18/051,126 patent/US20230091993A1/en active Pending
- 2022-12-01 JP JP2022192703A patent/JP7465331B2/ja active Active
-
2023
- 2023-03-07 JP JP2023034912A patent/JP7566955B2/ja active Active
- 2023-06-15 JP JP2023098465A patent/JP2023107983A/ja active Pending
-
2024
- 2024-03-29 JP JP2024055958A patent/JP2024071715A/ja active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102112595A (zh) * | 2008-08-06 | 2011-06-29 | 普莱克斯技术有限公司 | 用于控制哺乳动物细胞培养过程的系统和方法 |
| CN102307984A (zh) * | 2009-02-09 | 2012-01-04 | 英国龙沙生物医药股份有限公司 | 用于培养哺乳动物细胞的生物反应器 |
| US20130288346A1 (en) * | 2011-01-11 | 2013-10-31 | Xcellerex Inc. | Linearly scalable single use bioreactor system |
| US20150118753A1 (en) * | 2012-04-18 | 2015-04-30 | Life Technologies Corporation | Methods and apparatus for gas stream mass transfer with a liquid |
| US20170183617A1 (en) * | 2015-12-29 | 2017-06-29 | Life Technologies Corporation | Fluid mixing system with laterally displaced flexible drive lines and methods of use |
| US20170349874A1 (en) * | 2016-06-03 | 2017-12-07 | Lonza Ltd | Single Use Bioreactor |
| US20180010082A1 (en) * | 2016-06-03 | 2018-01-11 | Lonza Ltd | Bioreactor With Higher Agitation Rates |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112246173A (zh) * | 2020-09-29 | 2021-01-22 | 广州市爱百伊生物技术有限公司 | 一种配料罐及生产线 |
| TWI822173B (zh) * | 2021-08-17 | 2023-11-11 | 日商日揮股份有限公司 | 運算裝置、控制裝置、培養系統以及培養系統的設計方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230091993A1 (en) | 2023-03-23 |
| US11584910B2 (en) | 2023-02-21 |
| US20220145231A1 (en) | 2022-05-12 |
| JP2023026438A (ja) | 2023-02-24 |
| JP7465331B2 (ja) | 2024-04-10 |
| US20220243165A1 (en) | 2022-08-04 |
| EP3740560A1 (en) | 2020-11-25 |
| CN118767728A (zh) | 2024-10-15 |
| JP2023107983A (ja) | 2023-08-03 |
| US20190217261A1 (en) | 2019-07-18 |
| CN111615553A (zh) | 2020-09-01 |
| JP7241761B2 (ja) | 2023-03-17 |
| JP2024071715A (ja) | 2024-05-24 |
| JP7223012B2 (ja) | 2023-02-15 |
| JP2023067984A (ja) | 2023-05-16 |
| US20190218494A1 (en) | 2019-07-18 |
| WO2019143477A1 (en) | 2019-07-25 |
| US20190218496A1 (en) | 2019-07-18 |
| WO2019143476A1 (en) | 2019-07-25 |
| JP2021510524A (ja) | 2021-04-30 |
| JP7566955B2 (ja) | 2024-10-15 |
| WO2019143478A1 (en) | 2019-07-25 |
| JP2021511036A (ja) | 2021-05-06 |
| EP3740559A1 (en) | 2020-11-25 |
| EP3740561A1 (en) | 2020-11-25 |
| US11293003B2 (en) | 2022-04-05 |
| US11352598B2 (en) | 2022-06-07 |
| CN111615554B (zh) | 2024-08-16 |
| JP2021511033A (ja) | 2021-05-06 |
| CN111615554A (zh) | 2020-09-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111699240A (zh) | 用于细胞培养缩放的系统和方法 | |
| US11725171B2 (en) | Fluid mixing systems with adjustable mixing element | |
| US11162062B2 (en) | Methods and apparatus for gas stream mass transfer with a liquid | |
| EP3062919B1 (en) | Modular aeration device and method | |
| EP1965895B1 (en) | Cell culture and mixing vessel with gas circulation | |
| US20060196501A1 (en) | Systems and methods for mixing and sparging solutions and/or suspensions | |
| US9499290B2 (en) | Stationary bubble reactors | |
| US20240093137A1 (en) | Sparger assemblies for a bioprocessing system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |