CN111448405A - 皮带轮和传动系统 - Google Patents
皮带轮和传动系统 Download PDFInfo
- Publication number
- CN111448405A CN111448405A CN201880058814.7A CN201880058814A CN111448405A CN 111448405 A CN111448405 A CN 111448405A CN 201880058814 A CN201880058814 A CN 201880058814A CN 111448405 A CN111448405 A CN 111448405A
- Authority
- CN
- China
- Prior art keywords
- support surface
- pulley
- actuator
- cable
- transmission system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000005540 biological transmission Effects 0.000 title claims abstract description 122
- 230000033001 locomotion Effects 0.000 claims abstract description 93
- 230000007246 mechanism Effects 0.000 claims description 20
- 230000000295 complement effect Effects 0.000 claims description 11
- 230000000712 assembly Effects 0.000 claims description 8
- 238000000429 assembly Methods 0.000 claims description 8
- 230000000670 limiting effect Effects 0.000 claims description 8
- 230000001747 exhibiting effect Effects 0.000 claims description 7
- 230000001965 increasing effect Effects 0.000 claims description 4
- 230000007704 transition Effects 0.000 claims description 4
- 230000004913 activation Effects 0.000 claims description 2
- 239000002131 composite material Substances 0.000 claims description 2
- 230000003247 decreasing effect Effects 0.000 claims description 2
- 230000000717 retained effect Effects 0.000 claims description 2
- 230000015572 biosynthetic process Effects 0.000 claims 1
- 230000008859 change Effects 0.000 description 13
- 238000013459 approach Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000002860 competitive effect Effects 0.000 description 3
- 238000005461 lubrication Methods 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000002829 reductive effect Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 229910000831 Steel Inorganic materials 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 230000003213 activating effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 230000036961 partial effect Effects 0.000 description 2
- 239000010959 steel Substances 0.000 description 2
- 229920000049 Carbon (fiber) Polymers 0.000 description 1
- 206010012411 Derailment Diseases 0.000 description 1
- 208000027418 Wounds and injury Diseases 0.000 description 1
- 239000004760 aramid Substances 0.000 description 1
- 229920003235 aromatic polyamide Polymers 0.000 description 1
- 239000004917 carbon fiber Substances 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000002708 enhancing effect Effects 0.000 description 1
- 208000014674 injury Diseases 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
Images















































Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H9/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members
- F16H9/02—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion
- F16H9/04—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes
- F16H9/10—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes engaging a pulley provided with radially-actuatable elements carrying the belt
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M23/00—Transmissions characterised by use of other elements; Other transmissions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M6/00—Rider propulsion of wheeled vehicles with additional source of power, e.g. combustion engine or electric motor
- B62M6/40—Rider propelled cycles with auxiliary electric motor
- B62M6/55—Rider propelled cycles with auxiliary electric motor power-driven at crank shafts parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62M—RIDER PROPULSION OF WHEELED VEHICLES OR SLEDGES; POWERED PROPULSION OF SLEDGES OR SINGLE-TRACK CYCLES; TRANSMISSIONS SPECIALLY ADAPTED FOR SUCH VEHICLES
- B62M9/00—Transmissions characterised by use of an endless chain, belt, or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H55/00—Elements with teeth or friction surfaces for conveying motion; Worms, pulleys or sheaves for gearing mechanisms
- F16H55/32—Friction members
- F16H55/52—Pulleys or friction discs of adjustable construction
- F16H55/54—Pulleys or friction discs of adjustable construction of which the bearing parts are radially adjustable
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H9/00—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members
- F16H9/02—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion
- F16H9/04—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes
- F16H9/12—Gearings for conveying rotary motion with variable gear ratio, or for reversing rotary motion, by endless flexible members without members having orbital motion using belts, V-belts, or ropes engaging a pulley built-up out of relatively axially-adjustable parts in which the belt engages the opposite flanges of the pulley directly without interposed belt-supporting members
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Transmissions By Endless Flexible Members (AREA)
Abstract
本发明提供了一种传动系统(12),其包括第一皮带轮(11),该第一皮带轮通过缆绳(40)连接至输出端(111),使得第一皮带轮的运动引起输出端的旋转。第一皮带轮包括在第一皮带轮的第一侧面(17)和第一皮带轮的第二侧面(19)之间的环形凹槽(25)。环形凹槽适于容纳缆绳,使得缆绳由第一皮带轮支撑。第一皮带轮还包括位于环形凹槽中的一对支撑表面(31)。所述一对支撑表面相对于皮带轮的侧面在横向方向上可在间隔状态和啮合状态之间移动,其中,第一皮带轮处于第一直径,并且所述一对支撑表面不与缆绳啮合,其中,第一皮带轮具有第二直径,并且一对支撑表面支撑缆绳,第二直径大于第一直径。
Description
技术领域
本发明总体上涉及一种皮带轮。特别地,本发明涉及一种能够呈现可变直径的皮带轮。本发明还涉及结合有皮带轮的传动系统或皮带轮驱动系统。
背景技术
背景技术的以下讨论仅旨在促进对本发明的理解。讨论并不是确认或承认在申请的优先权日之前,所提到的任何材料是或曾经是公知常识的一部分。
传动系统用于各种车辆和工业设备中,以将动力从动力源传递到输出端,通常传递到驱动轮以移动车辆。一种采用这种动力传动系统的车辆是自行车。
自行车的传动系统通常为集成有两个曲柄臂的位于中央的链环的形式。车手蹬踏曲柄臂以旋转链环。链环与后链轮间隔开,但通过跨在链环和链轮之间的链条相互连接。由此,施加在链环上的扭矩传递到后链轮,后者也随之旋转。后链轮被固定到自行车后轮的轴上,使得当后链轮旋转时,后轮同时旋转。
自行车的传动系统通常进一步包括传动系统,以使车手能够操纵影响后轮的链环的旋转力。该传动系统一般包括多个不同直径的同轴安装的后链轮和多个不同直径的同轴安装的链环(通常在一个和三个之间)。通过激活齿轮机构,车手可以使链条移动到不同的链轮或链环上,从而使车手可以选择最适合环境的传动比。
当前的传动系统在它们可以达到的齿轮范围内受到限制。可以将自行车设置为较大的传动比,从而不使用可能的最小齿轮,或者将自行车设置为较小的“小型”传动比,从而不使用可能的最大齿轮。因此,在设置自行车时,必须选择传动比子集范围中的一个。
大的传动比范围用于相对平坦的地形,但是当主要平坦的地形的部分以明显的坡度上坡时不可避免地导致不希望的限制,因为这些不能通过优选的小的传动装置来克服。这继而会导致车手疲劳和竞争劣势。小齿轮传动比范围用于相对陡峭的上坡地形,但在下坡骑行时会导致不希望的限制,因为促进高速下刹车的大传动比是无法使用的。这会导致低于可能的速度,因此存在竞争劣势。
在实际水平上,现有技术的链条驱动的拨链器系统的齿传动比范围限制意味着车手和机械师必须要求安装大传动比范围还是小传动比范围。这不仅损害骑行效率,而且意味着在任何巡回赛事的比赛日之间更换和替换自行车上的系统时,需要进行持续的机械操作。同样的情况适用于休闲车手,如果他们想要有效地消耗骑行能量,则必须根据其期望的骑行类型来尝试更换传动系统。
尽管链条驱动的拨链器系统可以高效地将车手的能量从曲柄组传递到后轮,但是当链条未设置在前链轮链轮的平面与后链轮的平面之间的直线上时,即所有三个元件不在同一平面上时,该效率会大大降低。由于这种传动系统的固有局限性,仅对于动力传动范围的一小部分传动装置,才可以实现直线链条的设定。
当选择使链条偏离所选择的前链轮环和所选择的后链轮之间的直线的传动设置时,链条内以及链条与链轮环和链轮之间的所产生的应变和摩擦会导致动力传动效率明显下降。这意味着,多达20%的车手提供给曲柄组上的能量不会到达后轮。车手别无选择,只能选择这种效率低下的地形感应传动设置,因为仅仅出于动力传动系统效率的考虑,强迫车手的身体适应太高或太低的传动设置就更不可取了。
链条驱动的拨链器或任何分离式的传动系统的问题在于,在链条从一个链环或链轮重新定位到另一链条链轮的过程中,换档的过程导致动力传递的暂时损失。特别是在陡坡上骑行上坡时,会导致车手能量的明显损失,因为换档过程中产生的动量损失需要额外的努力才能使自行车恢复到换档之前的速度。这也导致在比赛期间对其他车手的冲刺做出响应的机会出现时间延迟,所有这些因素都构成了竞争劣势,并且可能会在赢得或未赢得公路比赛之间产生差异。
链条驱动的拨链器系统还具有在更换链环时固有的不连续传动的特点,这会导致需要同时更换链轮。这加剧了动量损失问题。也给疲劳的车手提出了重大挑战,并经常导致骑行效率低下。
传统的链条驱动的拨链器系统的另一个缺点是在静止时无法改变传动比。链条驱动系统需要施加踩踏节奏,以便于换档。当车手出人意料地必须停止或减速时,车手的能量将会损失,最终链传动系统的效率会降低,因为车手必须首先从太大的传动比开始换成较小的传动比。这消耗了不成比例的能量,并且在长途骑行中累积的能量会降低车手的耐力。
链条和拨链器驱动的自行车传动系统经过数十年的改进,但是在其部件中仍然具有不可避免的重量,尤其是实际上只能由重钢制造的链条本身。
链条驱动的拨链器系统在自行车受到的物理冲击,缺乏机械校准质量或其他未对准,部件不匹配以及缺乏合理的车手操作这几方面敏感。如果以上任何一项超出其操作设计的限制,则链条将从链环或链轮上脱落,在最坏的情况下,链条可能会断裂。链条脱轨在娱乐性骑行中很常见,甚至在专业公路赛车中也经常发生,即使在设备处于高峰状态时也要格外小心。传统链传动的其他机械故障包括因污垢进入或结冰而产生的某些传动比的阻塞。
传统的链条驱动系统以及其他轮轴传动系统需要润滑,以便在可能的最高效率下运行。这些系统对次优润滑非常敏感,导致需要定期维护,这既是运营开销又是成本。此外,新的链条只有在“磨合”期过后才能变得有效,从而消除了制造过程中产生的摩擦效率低下。然后需要在短时间内定期清洁它们,否则会导致效率低下。
链条驱动的拨链器以及轮轴行星传动系统在相互作用的两个金属表面(即,钢链和链轮或链环上的齿或轮轴中的行星齿轮链轮)之间经受高磨损率。这降低了零件的生命周期,意味着整个传动系统需要定期更换,以提供有效的动力传输。
以上对背景技术的讨论仅旨在促进对本发明的理解。尽管讨论集中在自行车的传动系统上,但很容易理解,在其他应用中使用的传动系统中也存在类似的问题。
发明内容
本发明的目的是提供一种皮带轮和包括该皮带轮的传动系统,该皮带轮可以改善,减轻或克服现有技术的至少一个缺点,或者至少将为公众提供实用的选择。
尽管已经特别参考自行车示出和描述了本发明,但是本发明同样可应用于许多其他应用中。例如,本发明可应用于当前使用不同传动比以实现特定效果的大多数缆绳/链/皮带/皮带轮驱动的系统。这些其他应用包括但不限于车辆,摩托车,割草机,四轮摩托车,泵,发电机,包括cnc机器在内的制造设备以及其他工业移动设备以及固定缆绳/皮带驱动的机械中的传动系统。这些其他应用以及对于本领域技术人员显而易见的应用被认为包括在本文所定义的本发明的范围内。
在整个说明书中,术语“缆绳”用于描述绳索,皮带,链条,安全带或任何其他可用于辅助将力从皮带轮传递到另一物体的绳索状装置。此外,术语“缆绳”可以表示单个整体式缆绳,或由许多较小的缆绳制成的缆绳,这些缆绳缠绕在一起,以首尾相连的方式连接或以其他方式形成以提供基本整体的构件。
本发明提供了一种传动系统,该传动系统包括第一皮带轮和与其间隔开的输出端,缆绳在第一皮带轮和输出之间延伸,使得第一皮带轮的运动引起输出端的运动,该第一皮带轮包括:
与第二侧面组件间隔开的第一侧面组件,第一侧面组件和第二侧面组件可旋转地固定在一起;
在第一侧面组件和第二侧面组件之间限定的可变环形凹口,该环形凹口适于容纳缆绳;
第一侧面组件和第二侧面组件中的每一个都提供用于支撑缆绳的支撑表面,该支撑表面可在第一位置和第二位置之间横向移动,第一位置与第二位置向外间隔开,当每个侧面组件的支撑表面处于第二位置时,第一侧面组件和第二侧面组件的支撑表面配合以啮合缆绳,于是缆绳从被支撑的第一直径移动至第二直径;
支撑表面包括多个支撑表面单元,其限定了支撑表面,每个支撑表面单元可以相对于彼此移动;
其中,当支撑表面在第一直径和第二直径之间移动时,第一皮带轮的宽度保持恒定,反之亦然。
优选地,传动装置还包括至少一个致动器,用于在第一位置和第二位置之间移动每个支撑表面,该至少一个致动器相对于第一侧面组件和第二侧面组件径向地移动。
至少一个致动器可以相对于第一皮带轮的旋转轴线径向地移动。至少一个致动器可以沿着第一皮带轮的径向可变地定位。
优选地,至少一个致动器包括通过桥构件连接在第一致动器和第二致动器之间的第一致动器。
优选地,第一致动器与第一侧面组件的支撑表面配合,第二致动器同时与第二侧面组件的支撑表面配合,以使每个支撑表面在第一位置和第二位置之间运动。
桥接构件将第一致动器和第二致动器保持固定关系。这样确保了每个支撑表面在与至少一个致动器啮合时被至少一个致动器保持在适当的位置,并且不会由于缆绳施加在其上的力而引起横向向外移动。
第一致动器和第二致动器中的至少一个或两者提供第一引导装置,以使支撑表面移动到第二位置。第一引导装置可包括与支撑表面相啮合的第一引导表面。
第一致动器和第二致动器中的至少一个或两者提供第二引导装置,以将支撑表面引导至第一位置。第二引导装置可包括第二引导表面,该第二引导表面使支撑表面移动到第一位置。第二引导表面可以包括致动器通道,该致动器通道与支撑表面的一部分协作以使支撑表面移动到第一位置。
皮带轮可包括控制装置,以控制至少一个致动器的运动。控制装置可以约束至少一个致动器,使得至少一个致动器被限制为相对于每个侧面组件的径向运动。
控制装置可包括至少一个支撑通道,其与至少一个致动器啮合以限制其沿着至少一个支撑通道的运动。所述至少一个支撑通道可相对于每个侧面组件沿径向方向延伸,使得所述至少一个致动器被限制为相对于每个侧面组件径向移动。至少一个致动器可以沿径向可变地定位。
控制装置可以包括支撑壳体,该支撑壳体支撑至少一个致动器。支撑壳体可以包括背板和移动机构。背板可以位于支撑表面和移动机构之间的位置。
背板可以包括至少一个支撑通道,用于限制至少一个致动器在径向方向上的运动。
移动机构可以使至少一个致动器沿着径向移动。
在本发明的一个方面,运动机构包括马达和一系列齿轮,它们与至少一个致动器配合以使至少一个致动器沿径向运动。
在本发明的另一方面,移动机构包括可相对于背板旋转的引导板,其中,引导板的旋转使至少一个致动器沿着引导板的至少一个支撑通道运动。在这方面,运动机构还包括马达和一系列传动装置,它们与导向板可旋转地配合以使至少一个致动器沿径向运动。马达可以容纳在自行车车架的主轴和/或底架中。
控制装置还可以包括一个或多个杠杆,以使至少一个致动器沿着径向移动,其中,杠杆的作用确定了马达的方向以及激活马达的时间。一个或多个操纵杆可以与马达进行无线/蓝牙通信,
在该方面的一个实施方式中,引导板为涡旋板的形式。涡旋板可包括螺旋结构。螺旋形式可以是螺旋槽的形式。螺旋槽可以是连续的。螺旋槽可以从邻近引导板的外周的第一端到邻近引导板的内周的第二端连续。螺旋形结构可以啮合至少一个致动器的一端,由此,涡旋板的旋转将使得至少一个致动器的端部沿着螺旋槽运动,从而使得至少一个致动器沿着背板上的至少一个支撑通道运动。所述至少一个支撑通道可基本垂直于穿过所述至少一个支撑通道的螺旋部分。
在该方面的另一实施方式中,引导板包括至少一个螺旋槽,该至少一个螺旋槽被定位成与背板的至少一个支撑通道相关联。至少一个螺旋槽可与至少一个致动器的一端啮合。所述至少一个螺旋槽相对于所述至少一个支撑通道成角度地定向,使得所述引导板的旋转导致所述至少一个螺旋槽相对于所述至少一个支撑通道移动,所述至少一个致动器被迫通过至少一个凹槽运动,从而沿着至少一个支撑通道径向运动。
至少一个致动器的端部可提供辊,该辊适于与螺旋槽啮合,当引导板旋转时,该辊辅助至少一个致动器的运动
在本发明的一方面,支撑表面包括以圆形配置布置的多个支撑段,其中每个支撑段的整体外观是截头的扇形段的整体外观。
每个支撑段包括多个支撑表面单元的子集。考虑单个支撑段,每个支撑表面单元一个接一个地堆叠,其中,在一个实施方式中,最靠近皮带轮的旋转轴定位的支撑表面单元是最小的内部支撑表面单元,每个支撑表面单元此后长度增加。
优选地,每个支撑表面单元被限制为相对于相邻支撑表面单元的轴向运动。每个支撑表面单元之间可以具有花键布置,其中,该花键布置防止相邻支撑表面单元之间的切向运动。
每个支撑表面单元可包括限制机构,以限制相邻支撑表面单元之间的轴向运动。限制机构可包括结合在每个支撑表面单元中的凸起,其中该凸起适于与相邻的支撑表面单元中的凹口配合。限制机构至少将支撑表面单元保持在第二位置,直到至少一个致动器使支撑表面单元移回到第一位置。
在本发明的另一方面,每个支撑表面包括多个支撑表面单元。每个单元可在第一位置和第二位置之间独立移动。每个单元被限制在第一位置和第二位置之间移动。
每个支撑单元适于协作地啮合至少一个致动器,其中至少一个致动器使每个支撑单元在第一位置和第二位置之间移动。
优选地,当所述至少一个致动器沿着所述至少一个支撑通道径向向外移动时,所述至少一个致动器啮合所述支撑表面单元以使所述支撑表面单元在所述第一位置和所述第二位置之间移动。优选地,至少一个致动器的第一引导表面啮合一个或多个支撑表面单元。
优选地,当所述至少一个致动器沿着所述至少一个支撑通道径向向内移动时,所述至少一个致动器啮合一个或多个支撑表面单元,以使所述支撑表面单元在所述第二位置和所述第一位置之间移动。优选地,至少一个致动器的第二引导表面啮合一个或多个支撑表面单元。
本发明还提供了一种传动系统,该传动系统包括第一皮带轮和与其间隔开的输出端,缆绳在第一皮带轮和输出端之间延伸,使得第一皮带轮的运动引起输出端的旋转,第一皮带轮包括:
彼此隔开的第一侧面组件和第二侧面组件同轴安装并且可旋转地固定在一起;
在第一侧面组件和第二侧面组件之间的环形凹槽,该环形凹槽适于容纳缆绳,使得缆绳由第一皮带轮以第一直径支撑;
第一侧面组件和第二侧面组件中的每一个均包括支撑表面,该支撑表面包括适于啮合缆绳的多个独立安装的支撑表面单元,每个支撑表面单元可在至少第一位置(其中,缆绳处于第一直径处)和和第二位置(其中,缆绳处于第二直径处)之间横向移动,第二位置与第一位置向内隔开。
本发明还提供了一种传动系统,该传动系统包括第一皮带轮和与其间隔开的输出端,缆绳在第一皮带轮和输出端之间延伸,使得第一皮带轮的运动引起输出端的旋转,第一皮带轮包括:
彼此隔开的第一侧面组件和第二侧面组件同轴安装并且可旋转地固定在一起;
在第一侧面组件和第二侧面组件之间的环形凹槽,该环形凹槽适于容纳缆绳,使得缆绳由第一皮带轮支撑;
第一侧面组件和第二侧面组件中的每一个均包括支撑表面,该支撑表面包括多个支撑表面单元,每个支撑表面单元可相对于彼此移动,该支撑表面可横向移动,该支撑表面可选择性地在至少第一位置和第二位置之间移动,第二位置与第一位置向内隔开,其中,支撑表面的全部或任何部分可以处于第一位置或第二位置,支撑表面适于与缆绳相啮合,其中当每个侧面组件的整个支撑表面处于第一位置时,缆绳被支撑在第一皮带轮的第一直径处,当每个侧面组件的整个支撑表面处于第二位置时,缆绳被支撑在第二个位置上直径,当每个侧面组件的支撑表面的第一部分处于第一位置,并且支撑表面的第二部分处于第二位置时,缆绳被支撑在具有第三直径的第一皮带轮上,第三直径为在第一直径和第二直径之间的直径。
支撑表面可以被选择性地定位成使得第三直径是在第一直径和第二直径之间的任何尺寸的直径。第一直径可以是第一皮带轮可能的最小直径。第二直径可以是第一皮带轮可能的最大直径。
第一侧面组件的支撑表面在第一位置和第二位置之间的运动可以紧接在第二侧面组件的支撑表面在第一位置和第二位置之间的运动之后或之前。
每个支撑表面单元可以在至少第一位置和第二位置之间横向移动。第一侧面组件可以连接到第二侧面组件。多个支撑表面单元可以协作以提供支撑表面,由此支撑表面单元的选择性运动使缆绳过渡定位在第一皮带轮的不同直径之间。
第一侧面组件和第二侧面组件可以同轴安装。
优选地,在每个支撑表面单元从第一位置移动到第二位置的过程中,缆绳被支撑在呈现出不断增大的直径的第一皮带轮上。
优选地,在每个支撑表面单元从第二位置移动到第一位置的过程中,线缆被支撑在呈现出不断减小的直径的第一皮带轮上。
优选地,支撑表面包括多个支撑表面段,其中每个支撑表面段提供一个或多个支撑表面单元。支撑表面段可以采取扇形段的形状,使得多个支撑表面段的组合构造是圆形的。
每个支撑表面单元提供至少一个适于啮合缆绳的接触表面。每个接触表面在大致中央方向上从支撑表面单元侧向延伸。也就是说,每个支撑表面单元的每个接触表面朝着第一皮带轮的中心平面延伸,其中该中心平面基本上垂直于皮带轮的旋转轴线。
优选地,第一侧面组件的接触表面偏离第二侧面组件的对应接触表面。
第一侧面组件的接触表面可以与第二侧面组件的对应的接触表面偏置,使得第一侧面组件的接触表面与第二侧面的对应的接触表面位于不同的直径/径向位置处。
第一侧面组件的接触表面可以与第二侧面组件的对应接触表面偏置,使得当第一侧面组件的接触表面处于第二位置并且第二侧面组件的接触表面处于第二位置时,接触面重叠。
优选地,每个支撑表面单元向第二位置的移动使得第一侧面组件的接触表面的一部分被接收在第二侧面组件的径向相邻的接触表面之间。通过这种布置,支撑表面单元有效地啮合在一起以提供用于支撑缆绳的基本连续的凹槽。
第一皮带轮可包括支撑架,用于在缆绳处于与第一皮带轮的最小可能直径相对应的位置时支撑缆绳。
在本发明的一方面,支撑架是固定的。支撑架可以是固定在第二位置的一个或多个支撑表面单元的形式。
在本发明的另一方面,支撑架可以是可移动的。支撑架可以由最里面的支撑表面单元提供,其中,最里面的支撑表面单元被阻止移动到其第一位置,而不是在中间位置和第二位置之间移动,中间位置在第一位置和第二位置之间。背板还可包括形成支撑架的一部分的支架部分。
缆绳可以连接第一皮带轮和输出端。缆绳可以在第一皮带轮和输出端之间延伸,使得缆绳部分地围绕皮带轮并且部分地围绕输出成环。
缆绳可以是连续带的形式,该连续带摩擦地啮合第一皮带轮。带的横截面可以是V形的,并且可以被截断。
缆绳可以具有适于由第一侧面组件和第二侧面组件中的每一个的支撑表面支撑的面,其中带的横截面是V形的,并且可以被截断。优选地,至少50%的V形面由支撑表面支撑。优选地,至少75%的V形面由支撑表面支撑。优选地,至少80%的V形面由支撑表面支撑。优选地,至少85%的V形面由支撑表面支撑。
皮带可包括从皮带部分悬垂的多个楔形段。优选地,带的横截面轮廓在张紧状态和松弛状态之间变化,张紧状态中的轮廓代表狭窄的V形,而松弛状态中的轮廓代表更宽的V形。当皮带跨在皮带轮和输出端之间时,皮带可能会处于张紧状态。当皮带与皮带轮啮合以及皮带与输出端啮合时,皮带可能会处于松弛状态。当皮带处于松弛状态时,较宽的V形横截面具有较大的表面积,可与皮带轮的环形凹槽和输出端啮合。在这方面,V形与环形凹槽互补。当处于张紧状态时,较窄的V形呈现出减小的表面积,使得横截面比环形凹部的横截面窄。结果,皮带直到更进一步围绕皮带轮才与皮带轮啮合,并且比皮带仅具有一种状态的情况更早地与皮带轮脱离。这种构造减少了在皮带轮与皮带轮啮合和脱离的过渡过程中遇到的摩擦损失。
在本发明的一方面,当从所有方向考虑时,皮带和皮带轮之间的摩擦力是相同的。
在本发明的另一方面,皮带和皮带轮之间在皮带驱动方向上的摩擦与皮带和皮带轮之间在垂直于或接近驱动方向的方向上的摩擦之比尽可能高大于1:1,因为行驶方向的摩擦力小于法向摩擦力。当皮带和皮带轮之间在皮带从动方向上的摩擦力高,并且皮带和皮带轮之间在垂直于从动方向的方向上的摩擦力低时,可以进行动力传递而不会发生皮带打滑。它还可以改善传动的换档,以克服皮带和皮带轮之间的非驱动方向摩擦。
在本发明的一方面,皮带的表面和/或皮带轮的表面可包括表面不平整,例如凸起和/或滚花,以增加皮带和皮带轮之间的摩擦。
在本发明的另一方面,皮带的表面和/或皮带轮的表面可以包括表面不规则性,诸如凸起,滚花,凹槽和/或图案,以帮助增加皮带之间的摩擦比。皮带轮在皮带驱动方向上相对于皮带和皮带轮之间的摩擦力在垂直于或垂直于驱动方向的方向上产生。
缆绳可以是复合材料的形式。缆绳可能有芯。芯可以由诸如芳香族聚酰胺或碳纤维的非屈服材料形成。尽管芯是柔性的,但是一旦形成带,芯的长度就不会显著屈服。
优选地,输出端为第二皮带轮的形式。第二皮带轮可以是第一皮带轮的较小或较大的版本。第二皮带轮可包括彼此间隔开的第一侧面组件和第二侧面组件,第一侧面组件连接到第二侧面组件,使得第一侧面组件和第二侧面组件同轴地安装。优选地,第二皮带轮的第一侧面组件和第二侧面组件中的每个包括支撑表面。
在本发明的一个方面,第一皮带轮包括致动装置,以致使每个侧面组件的支撑表面单元在第一位置和第二位置之间运动。使用致动装置,第一皮带轮控制缆绳的位置,从而有效地确定传动系统的传动装置。优选地,第二皮带轮对第一皮带轮的每个侧面组件的至少一个环的运动起反作用。在这方面,第二皮带轮是被动皮带轮。
在本发明的另一方面,第二皮带轮包括致动装置,以使每个侧面组件的至少一个环在第一位置和第二位置之间运动。使用致动装置,第二皮带轮控制缆绳的位置,从而有效地确定传动系统的传动装置。优选地,第一皮带轮对第二皮带轮的每个侧面组件的支撑表面单元的运动起反作用。
致动装置可以包括至少一个引导装置,其中,至少一个引导装置在第一位置和第二位置之间选择性地移动支撑表面单元。
至少一个引导装置可以由至少一个致动器提供。至少一个致动器可以包括以固定关系保持的第一致动器头部和第二致动器头部。每个致动器头部可提供至少一个引导装置。
至少一个引导装置可以是第一引导装置和第二引导装置的形式。第一引导装置可以使支撑表面移动到第二位置。第一引导装置可包括第一引导表面,该第一引导表面啮合支撑表面的每个支撑表面单元。
第二引导装置可以将支撑表面引导到第一位置。第二引导装置可包括第二引导表面,该第二引导表面使支撑表面移动到第一位置。第二引导表面可包括致动器通道,该致动器通道与每个支撑表面单元的一部分协作以使支撑表面移动至第一位置。
致动装置可以包括控制装置,以控制至少一个致动器的运动。控制装置可以约束至少一个致动器,使得至少一个致动器被限制为相对于每个侧面组件的径向运动。
优选地,传动系统布置成使得当第一皮带轮从第一直径移动到第二直径时,第二皮带轮从第二直径移动到第一直径。当皮带长度固定时,皮带必须相对于第二皮带轮运动,以补偿皮带相对于第一皮带轮的运动。因此,当皮带被定位成绕着第一皮带轮的较大的第二直径旋转时,使皮带绕着第二皮带轮的较小的第一直径旋转,反之亦然。
本发明还提供了一种传动系统,该传动系统包括第一皮带轮和与之间隔开的输出端,缆绳在第一皮带轮和输出端之间延伸,使得第一皮带轮的运动引起输出端的旋转,第一皮带轮包括:
彼此隔开的第一侧面组件和第二侧面组件同轴安装并且可旋转地固定在一起;
在第一侧面组件和第二侧面组件之间的环形凹槽,该环形凹槽适于容纳缆绳,使得缆绳由第一皮带轮支撑;
第一侧面组件和第二侧面组件中的每一个均包括由多个环提供的支撑表面,其中第一侧面组件上的环的直径与第二侧面组件上的环的直径不同,并且第二侧面组件上的环具有在第一侧面组件上的偏移对应环,其中对应环在至少第一位置和第二位置之间移动,第二位置与第一位置向内隔开,对应环适于啮合缆绳,其中当对应环处于在第二位置,缆绳由第一皮带轮以与相邻的相应环所限定的直径不同的直径支撑,每个环包括多个支撑表面单元,每个环的每个支撑表面单元可通过至少一个致动器独立地移动。
本发明提供了一种传动系统,该传动系统包括第一皮带轮,该第一皮带轮通过线缆连接至输出端,使得该第一皮带轮的运动引起该输出端的旋转,该第一皮带轮包括:
在第一皮带轮的第一侧和第一皮带轮的第二侧之间的环形凹槽,该环形凹槽适于容纳缆绳,使得缆绳由第一皮带轮支撑;
一对支撑表面位于环形凹槽中,该对支撑表面可在一定间隔状态下相对于皮带轮的侧面在横向方向上移动,其中第一皮带轮处于第一直径,并且该对支撑表面具有啮合状态,其中第一皮带轮处于第二直径,并且一对支撑表面支撑缆绳,第二直径大于第一直径。
本发明提供一种变径皮带轮,该皮带轮包括:
环形凹槽,用于容纳缆绳,使得缆绳在皮带轮的第一直径处由皮带轮支撑;一对支撑表面位于环形凹槽中,该对支撑表面在横向方向上可在间隔状态和啮合状态之间移动,其中,间隔状态是一对支撑表面不与缆绳啮合,而啮合状态是一对支撑表面在皮带轮的第二直径处支撑缆绳,第二直径大于第一直径。
本发明提供了一种可变直径皮带轮,该皮带轮包括:
环形凹槽,用于在皮带轮的第一直径处容纳缆绳;
环形凹槽提供了一个支撑表面,用于在将缆绳容纳在其中时支撑该缆绳,该支撑表面可移动以具有第一直径和第二直径;
其中,支撑表面可定位成具有第一直径和第二直径之间的任何直径。
优选地,当支撑表面被接收到皮带轮上时,支撑表面对缆绳呈现基本连续的表面。支撑表面的横截面轮廓可以与缆绳的与支撑表面啮合的那部分的横截面形状互补,使得缆绳被保持在环形凹槽中。
优选地,当支撑表面在第一直径和第二直径之间移动时,缆绳在被支撑在其上时保持在相同的径向平面中。
优选地,支撑表面由第一组支撑表面单元和第二组支撑表面单元形成,每个支撑表面单元可相对于彼此移动。
第一组支撑表面单元和第二组支撑表面单元可以啮合在一起或彼此重叠以形成支撑表面。
所述第一组支撑表面单元和所述第二组支撑表面单元可在间隔状态(其中缆绳被支撑在皮带轮的第一直径处)和所述啮合状态(其中缆绳被支撑在皮带轮的第二直径处)之间沿横向方向移动,由此一组支撑表面单元在状态之间运动期间,缆绳可以被支撑在呈现变化直径的支撑表面上。
周向相邻的支撑表面单元可以限定环。每个环可能不连续。优选地,在同一环的相邻支撑表面单元之间限定间隙。
第一组支撑表面单元的每个环具有第二组支撑表面单元的互补环,从而互补环彼此呈交错关系以提供环对。每个环对的啮合提供了用于啮合缆绳的支撑表面。
每个环对可以在第一位置和第二位置之间移动。
在第一位置,环对的互补环可以在轴向/横向方向上彼此间隔开。在此位置,环对不能支撑缆绳。
在第二位置,环对的互补环可以处于啮合状态以提供支撑表面。在此位置,缆绳由环对支撑。
每个环对可以移动到在第一位置和第二位置之间的第三位置。
支撑表面单元的每个环可被布置成使得当环接近第二位置时,其相邻的上/外环开始朝第二位置移动。
每组支撑表面单元的每个环可被布置成使得当环接近第一位置时,相邻的下部/内环向其开始朝向第一位置的运动。
每个支撑表面单元可以是楔形的,以提供与缆绳啮合的倾斜的接触表面。
皮带轮可包括用于容纳第一组支撑表面单元的第一侧壳体。皮带轮可包括第二侧壳体,用于容纳第二组支撑表面单元。
第一侧壳体和第二侧壳体可相对于彼此同轴安装,以在它们之间限定环形凹槽。
皮带轮可包括致动装置,以引起环对在第一位置和第二位置之间的运动。
致动装置可以包括多个致动器。每个致动器可以在径向上在皮带轮的中心的第一位置和第二位置之间在皮带轮的外径附近移动。每个致动器可具有至少一个头部,该至少一个头部适于当每个致动器在位置之间移动时引起支撑表面单元的移动。优选地,每个致动器具有第一头部,其适于引起第一侧面组件的支撑表面单元的运动,以及第二头部,其适于当每个致动器在位置之间移动时引起第二侧面组件的支撑表面单元的运动。
第一头部和第二头部可通过在其间延伸的桥接相互连接,使得它们彼此保持固定关系。
每个致动器被支撑在第一侧壳体和第二侧壳体中的相应通道中。多个致动器可以以星形网状布置彼此径向地间隔开。
当致动器的第一头部和第二头部从其第一位置向第二位置移动时,它们使支撑表面单元相继地从其第一位置移动至第二位置。
优选地,当每个致动器的头部在沿径向向外的方向移动时,在每个致动器的头部相继啮合每个支撑表面单元之后,每个支撑表面单元移动到其第二位置。
优选地,当每个致动器的头部在沿径向向内方向移动时,在每个致动装置的头部连续通过每个支撑表面单元之后,每个支撑表面单元移回到其第一位置。
致动装置可以被手动致动或自动致动。
在本发明的一方面,致动装置可以由于来自操作者的输入力而被机械致动。
在本发明的另一方面,致动装置可以由马达致动,其中马达适于引起致动器的运动。
在本发明的另一方面,致动装置还包括控制装置。控制装置可以提供导向板。优选地,每组支撑表面单元具有可相对于其旋转的引导板。致动器的每个端部包括可旋转的轮,其中该轮被容纳在导向板的导向装置中。导向装置可以是螺旋形的,使得随着导向板的旋转,每个轮子都围绕螺旋形导向装置旋转。优选地,导向板的旋转使致动器沿由结合在第一壳体和第二壳体中的每一个中的径向通道指示的径向方向移动,其中致动器的移动引起支撑表面单元在第一位置和第二个位置之间的移动。
本发明提供了一种传动系统,该传动系统包括如前所述的可变直径皮带轮,该皮带轮通过皮带连接至输出端,使得皮带轮的运动引起输出端旋转,该致动装置由马达致动。其中,马达由位于传动系统空间足印内的电源供电,例如位于曲柄臂或主轴内。可以通过充电插座为电源充电,从而无需卸下电池即可进行充电。
附图的简要说明
在本发明的非限制性实施方式的以下描述中,将更全面地描述本发明的其他特征。仅出于举例说明本发明的目的而包括该描述。不应将其理解为对如上所述的本发明的广泛概括,公开或描述的限制。将参考附图进行描述,其中:
图1是根据本发明的第一实施方式的自行车的传动系统的前皮带轮组件的侧视图;
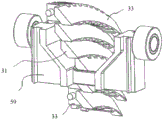
图2是图1的第一皮带轮的透视图;
图3是图2的侧视图;
图4是类似于图3的视图,其中侧壳体被移除;
图5是图3的局部分解图,外壳和背板从一侧看是分解形式;
图6是类似于图5的视图,其中从一侧除去了壳体和垫板;
图7是图3的局部分解图,其中,壳体、背板和支撑表面从一侧看是分解形式;
图8是图3所示的第一皮带轮的分解主视图;
图9是类似于图8的视图,其中从一侧去除了壳体、背板和支撑表面;
图10是图9的侧视图;
图11是类似于图10的视图,其中去除了多个致动器;
图12是以分解图示出的第一皮带轮和多个致动器的一侧的透视图;
图13至图15(a,b)是支撑表面单元的各种视图;
图16(a,b,c)是图13至15所示的支撑表面单元之一的各种视图;
图17(a,b)是与相邻支撑表面单元啮合的一个支撑表面单元的近视图;
图18是不具有导向轮的致动器的透视图;
图19是多个致动器的透视图;
图20是支撑一个支撑表面单元的两个致动器的透视图;
图21是第一皮带轮的剖视图;
图22是启动装置的导向板的透视图;
图23、24、25是图22的侧视图,其中导向板处于不同的角度位置,以示出多个致动器的运动;
图26是沿垂直平面截取的第一皮带轮的横截面透视图;
图27是图26的端视图;
图28是图26的上部的放大图;
图29是图28的端视图的示意图;
图30是第一实施方式的传动系统在最小/最低传动比时的示意图(为了说明,每个皮带轮的一侧被移开);
图31至图34是第一皮带轮的截面的各种示意图,示出了图30的皮带轮的多个支撑表面单元在将缆绳支撑在其最低位置处时的位置,该直径最小;
图35和36是第一皮带轮的一部分的示意图,示出了当致动装置开始相对于第一皮带轮的中心区域向外移动时,多个支撑表面单元的位置变化;
图37和38是第一皮带轮的一部分的示意图,示出了当致动器相对于第一皮带轮的中心区域继续向外移动时,多个支撑表面单元的位置变化;
图39和40是第一皮带轮的一部分的示意图,示出了当致动装置进一步相对于第一皮带轮的中心区域继续向外移动时,多个支撑表面单元的位置变化;
图41、42和43是传动系统的示意图(为了说明目的,每个皮带轮的一侧被移开)和第一皮带轮的一部分,示出了当致动器接近相对于第一皮带轮的中心区域的最外位置时,多个支撑表面单元的位置变化;
图44和45是传动系统的示意图(为了说明目的,每个皮带轮的一侧被移开)和第一皮带轮的一部分,示出了当致动器在相对于第一皮带轮的中心区域的位置最外侧时,多个支撑表面单元的位置变化;
图46(a,b,c,d)是第一皮带轮的一部分的示意图,示出了当致动器返回其最低位置时多个支撑表面单元的位置变化;
图47是图5的垫板的透视图;以及
图48是第一皮带轮的示意图,该第一皮带轮具有曲柄臂和位于其中的马达。
具体实施方式
如图中所示,根据本发明的第一实施方式的本发明为传动系统12的形式,其包括第一可变直径皮带轮11。皮带轮11特别适于与传动系统一起使用,其与无级变速器(CVT)的功能相似/相同。
如在下面的讨论中要强调的,本发明与现有技术的CVT之间的区别在于,本发明的皮带轮构造成保持相对窄的规格。这使得皮带轮和与之相关联的传动系统能够应用于具有最小空间的传动系统中,例如自行车,其包括常规自行车,电动自行车和智能电动车。
现有的CVT包括相对较厚的前和/或后皮带轮装置,这在具有有限空间来容纳皮带轮装置的应用中不容易使用。例如,现有技术的CVT不能应用于自行车,因为它将阻碍踏板动作,不能提供足够的传动比范围,在链条上施加很大的应力和/或太重。本发明的相对较窄的皮带轮为传动系统提供了实用且有效的动力传动几何形状。当应用于自行车时,本发明的皮带轮的厚度类似于具有两个或更多个链环的常规自行车的曲柄组的厚度。
本发明还允许皮带轮的直径随着皮带轮宽度的最小改变或不改变而增加。这提供了大范围的传动比。进一步增强了本发明适合的广泛应用。
以下实施方式讨论了应用于自行车的本发明。然而,在其他类型的驱动设备中也有更多的应用。这些包括在车辆,割草机,电动踏板车,四轮摩托车,雪地摩托,移动或工业设备(例如发电机,涡轮机,输送机和链锯)中的应用。这些其他以及类似的应用被认为在本发明的范围内。
在本实施方式中,皮带轮11适于支撑两个曲柄臂13,踏板/卡扣15固定到该曲柄臂13。车手(未示出)可以蹬踏踏板15以引起皮带轮11旋转,这种布置是众所周知的。
在该实施方式中,皮带轮11固定至自行车的框架(未示出),使得皮带轮11位于框架附近。皮带轮11包括第一侧面组件17和第二侧面组件19。第一侧面组件17和第二侧面组件19同轴安装。
曲柄臂之一13a连接到穿过自行车车架的底部支架的轴或主轴,然后相对于第二侧面组件19固定。第二曲柄臂13b直接固定到第一侧面组件17的外表面。。
第一侧面组件17和第二侧面组件19彼此隔开一定距离,使得当组装皮带轮11时,第一侧面组件17和第二侧面组件19之间限定了环形凹槽25。如图32所示,环形凹槽25适于容纳V型带40形式的缆绳。
每个侧面组件17、19包括壳体27,背板29和支撑表面31。第二侧面组件19的构造与第一侧面组件17的构造在很大程度上相同,并且为了便于参考,当与第一侧面组件17相关联时,侧面组件的相似组件以“a”为后缀,而与第二侧面组件19相关联时,以“b”为后缀。
如图3最佳所示,环形凹槽25由第一侧面组件17的外壳27a,第二侧面组件19的外壳27b和支撑表面31限定。支撑表面31可在第一/分开状态(其中支撑表面31不与皮带40啮合)和第二/啮合状态(其中支撑表面31在皮带轮的第二直径处支撑皮带40,第二直径大于第一直径)之间的横向方向上移动。
每个支撑表面31包括多个支撑表面单元33。布置时,支撑表面单元33呈圆形结构,分为多个支撑表面段35。每个支撑表面段35出于某种原因具有间隙37,这将在下面描述。
如图14所示,每个支撑表面段35包括一组多个支撑表面单元33,布置成一个在另一个的顶部。在该实施方式中,每个支撑表面段35包括堆叠在另一支撑表面单元33上的一个支撑表面单元33。在其他实施方式中,每个支撑表面段35可具有并排关系的两个或更多个支撑表面单元33,一个或多个支撑表面段35堆叠在其上。
每个支撑表面单元33提供一个接触表面39,该接触表面39在就位时朝着皮带轮的中心平面以倾斜的方向延伸。接触表面39与其他支撑表面单元33的接触表面39配合以提供支撑表面31,该支撑表面31直接啮合并支撑呈V形带40形式的缆绳,如在下面进一步详细描述的那样。
每个支撑表面单元33的上表面41成形为与相邻支撑表面单元33的下表面43的互补形状相啮合的形状。如图13至17所示,上表面41的互补形状和相邻的下表面43提供了花键布置45,由此相邻的支撑表面单元33的运动被花键布置45限制为相对于彼此横向运动,如图13和15中的箭头``A”所示。每个最里面的支撑表面单元33c的下表面43也与花键布置45中的背板29a,29b相啮合,以限制彼此间的横向运动。类似地,每个最外侧支撑表面单元33d的上表面41与花键布置45中垫板29想啮合,以限制彼此间的横向运动。图47示出了随同花键46一起的背板29,花键46与最里面的支撑表面单元33c和最外面的支撑单元33d上的配合花键配合。
每个支撑表面单元33的下表面43还包括凸起47。而每个上表面41包括的凹口49,用于容纳相邻支撑表面单元33的凸起47。如图16b)和16c)最佳所示,凸起47和凹口49位于远离接触表面39的位置。当相邻的支撑表面单元33处于第二位置时,凸起47被容纳在相邻的支撑表面单元33的凹口49中。图17示出了两个相邻的支撑表面单元结合在一起,其中一个支撑表面单元33的凸起47被容纳在相邻的支撑表面单元的凹口49中。凸起47和凹口49的配合限制了下支撑表面单元33的横向运动,使得下部相邻的支撑表面单元33不能返回到第一位置。在支撑表面单元33可以返回到第一位置之前,上部相邻的支撑表面单元33必须首先返回到第一位置。。
每个支撑表面单元33在每一端都具有销51。如下所述,销51用于在第一位置和第二位置之间移动支撑表面单元33。
每个支撑表面单元33在每一端还具有引导表面53。引导表面53位于销51和接触表面39之间。在该实施方式中,引导表面53平行于接触表面39。
每个支撑表面单元33呈弧形,从而相邻支撑表面段35中的相同直径的支撑表面单元33限定出一个环,由于间隙37,该环是不连续的。
如下所述,销钉51用于在第一位置和第二位置之间移动支撑表面单元33。
如下所述,引导表面53用于在第一位置和第二位置之间移动支撑表面单元33。
皮带轮11还包括致动装置57,以使支撑表面31在第一位置和第二位置之间移动。
致动装置57包括多个致动器59和控制致动器59运动的控制装置。每个致动器59可相对于皮带轮11沿径向移动。随着每个致动器59径向向外移动,则使支撑表面31从第一位置移动到第二位置。随着每个致动器59径向向内移动,使支撑表面31从第二位置移动到第一位置。控制装置还能够将致动器59保持在相对于背板29a,29b的最内位置和最外位置之间的任何位置。
如图18、19和20最佳所示,每个致动器59包括第一头部61a和第二头部61b,它们通过在其间延伸的桥63间隔开。
每个头部61a,61b提供第一引导装置65,以将支撑表面单元33移动到第二位置。第一引导装置65包括第一引导表面67,该第一引导表面67适于滑动地啮合每个支撑表面单元33的引导表面53。
每个头部61a,61b还提供第二引导装置69,以将支撑表面31引导至第一位置。第二引导装置69在头部61a,61b的每一侧上包括第二引导表面71,该第二引导表面71啮合每个支撑表面单元33的销51以将其移动到第一位置。第二引导表面71设置为致动器通道73的形式,该致动器通道73接收并与支撑表面单元33的销51相配合以将支撑表面31移动到第一位置。
致动器通道73在头部61a,61b的上部具有第一开口75,该第一开口具有足够的宽度以容纳销51。随着每个致动器59径向向外移动,支撑表面单元33的每一侧的销51每容纳在相应的第一开口75中。致动器59的进一步向外运动导致致动器59的第一引导表面67与每个支撑表面单元33的引导表面53相啮合。在这一点上,使支撑表面单元33朝其第二位置移动。当支撑表面单元33开始朝其第二位置移动时,销51沿着第二引导表面71移动,该第二引导表面在该实施方式中为倾斜壁的形式。一旦支撑表面单元33到达第二位置,销51进入第二开口77。
为了使支撑表面单元33从第二位置移动到第一位置,致动器59需径向向下移动。当致动器59接近支撑表面单元33时,销51被容纳在第二开口77中。致动器59的进一步向下移动导致销与第二引导表面71的倾斜壁相啮合。这迫使支撑表面单元33从第二位置移动到第一位置。一旦致动器59已经充分向下移动以使得支撑表面单元33处于第一位置,销51就通过第一开口75离开致动器通道53。
每个致动器的每个端部都具有栓钉79,该栓钉上安装有可旋转轮81。该可旋转轮有助于致动器59沿径向的平滑运动。
控制装置还包括多个支撑通道83,其将多个致动器59的运动限制为沿径向方向的运动。如图4和图5最佳示出,在每个背板29a,29b中形成多个支撑通道83。如图4所示,每个致动器59的每个端部定位在其各自的支撑通道83中,使得背板29被容纳在致动器头部61的侧面和轮81之间。
控制装置还包括移动机构85,其使每个致动器59沿着其支撑通道83移动。在该实施方式中,移动机构85由与每个壳体27a,27b一体形成的导向板87提供。如图22中最佳所示,导向板87提供一个具有封闭端的螺旋槽89,该螺旋槽从内周边91延伸到外周边93。该导向板相对于背板29可旋转地安装。
螺旋槽89适于容纳每个致动器59的轮81,使得当引导板87旋转时,轮81沿着螺旋槽89行进。然而,由于背板29中的支撑通道83限制了每个致动器59在径向方向上的运动,并且由于每个致动器59被角向固定,因此导向板87的旋转只能转换成每个致动器59的径向运动。
因为螺旋槽89是螺旋形的,所以每个致动器59必须沿着螺旋形放置在不同的位置。如果每个致动器相同,则每个致动器59将处于不同的半径。这意味着支撑表面在一个直径处的部分将位于第一位置,其他部分将位于第二位置,再其他部分将介于两者之间。为了确保支撑表面31上的任何点具有均匀的直径(即,该直径的所有支撑表面单元33处于第一位置,第二位置或之间),每个致动器的第一引导装置65和第二引导装置65需要具有基本相同的半径。为此,将栓钉79沿着每个致动器59的头部61a,61b放置在不同的位置,如图10和20最佳所示。
参照图48,控制装置58还包括马达97和传动系统99。传动系统99与导向板87可操作地啮合,马达97的致动导致传动系统99的运动。这导致引导板87旋转,从而使致动器59沿径向移动。
当考虑沿周向相邻布置的多个支撑表面单元33时,相邻的支撑表面单元33呈圆形结构,在其之间具有间隙37。每个支撑表面单元33可相对于其侧面组件17、19在横向方向上在第一位置和第二位置之间移动,该第一位置是支撑表面单元33与背板29a,29b相邻的位置,而第二位置是支撑表面单元33与背板29a,29b间隔开的位置。
支撑表面单元33布置成使得一侧上的支撑表面单元33a相对于另一侧上的对应支撑表面单元33b偏移。在这种布置中,当处于第二位置时,支撑表面单元重叠以提供支撑表面31以支撑至少约75%的皮带40。
如图31至图34所示,第一皮带轮11包括用于在皮带40处于与第一皮带轮11的最小直径相对应的位置时支撑皮带40的支撑架95。支撑架95是以支撑表面单元33c最接近皮带轮11的中心轴线(见图33)和背板的托架部分101(见图29)的形式呈现。如图33所示,当皮带40由支撑架95支撑时,其余的支撑表面单元处于其第一位置,皮带40由皮带轮11以系统最小直径支撑,如图32所示。在该实施方式中,支撑表面单元33c在它们的第二位置和中间位置之间移动。如图33所示,支撑面单元33c在图中右手侧的中间位置比在左手侧的中间位置更靠近第二位置。如下所述,当致动器向外移动时,导致右侧的支撑表面单元33c移动到其第二位置,随后是左侧的支撑表面单元33c。
虽然未在图33中示出,但是当皮带处于皮带轮的最小直径时,背板的托架部分101还提供了支撑皮带40的一部分支撑表面31。
由于致动器59可以设置在它们的最内位置和最外位置之间的任何位置,所以皮带40的位置可以由皮带轮以最小直径和最大直径之间的任何直径支撑。
第一可变直径皮带轮11可以与第二可变直径皮带轮111结合以构成传动系统12。如在图中所示,作为连续环的皮带40在两个皮带轮11,111之间延伸,以将运动从第一皮带轮11传递到第二皮带轮111。
第二皮带轮111用作从动皮带轮,由此它对第一皮带轮11的变化作出反应。在这方面,第二皮带轮111是第一皮带轮11的较小型式。
由于多个支撑表面单元33的构造,当皮带40相对于皮带轮11在最小直径和最大直径之间移动时,皮带轮为皮带40提供了基本上连续的支撑表面。在本实施方式中,皮带40的大约75%在任何时候都被支撑在多个支撑表面单元33上。
图30至46示出了传动系统的各种视图。传动系统12包括通过皮带40相互连接的第一可变直径皮带轮11和第二可变直径皮带轮111。各个视图示出了皮带40在传动系统12的各个位置,其中各个位置对应于传统的自行车链条驱动的拨链器系统变速器的各个传动位置。
参照图30至图34,示出了传动系统12处于与最小/最低传动比有关的位置,其中致动器59位于其最内侧位置,由此每个致动器头部61a的第一引导表面67,61b与支撑表面单元33的引导表面53啮合。这也由图23示出,其示出了每个致动器59在其最可能的内部位置。在该位置,第一皮带轮11的第一侧面组件17的最里面的支撑表面单元33a和第一皮带轮11的第二侧面组件19的最里面的支撑表面单元33b分别处于它们的第二位置。当处于该位置时,第一皮带轮11的其余支撑表面单元33处于其第一位置。
当皮带40由最小直径的第一皮带轮11支撑时,皮带40由最大直径的第二皮带轮111支撑,如图30所示。在该位置,皮带的最外侧支撑表面单元33第二带轮111的第一侧面组件17和第二带轮111的第二侧面组件19的最外面的支撑表面单元33分别处于第二位置,其余的支撑表面单元33也处于第二位置。
随着第一皮带轮11的致动器59的头部61a,61b向外移动,下一个相邻支撑表面单元33的销51进入致动器通道73的第一开口75。进一步的向外移动导致第一引导件头部61a,61b的表面67与支撑表面单元33的引导表面53啮合。在这一点上,支撑表面单元33开始向其第二位置移动。致动器59的进一步向外运动将导致支撑表面单元33到达其第二位置。一旦处于该位置,销51与致动器通道73的第二开口77对准并且能够离开致动器通道73的第二开口77,从而允许致动器59继续其向外运动。
当致动器59进一步向外移动时,随后的相邻支撑表面单元33继续这种移动顺序。
一旦致动器59已经通过支撑表面单元,从而支撑表面单元33处于其第二位置,支撑表面单元的下表面43中的凸起47对准凹口49并被容纳在下部相邻支撑表面单元的上表面41的凹口49中。这将下部相邻支撑表面单元保持在第二位置,直到致动器59向内返回并且使上部相邻支撑表面单元返回其第一位置。这种配合确保了支撑表面单元保持在它们的第二位置,并且不会被致动器59造成意外地返回其第一位置。
参考图35和36,示出了传输系统12在第一中间位置。在这些图中,致动器59已经开始沿径向向外运动。右手侧的支撑表面单元33c已经移动到第二位置,而左手侧的支撑表面单元33c已经进一步向其第二位置移动。这导致支撑表面31向外移动至更大的直径,从而使皮带40也移动至该直径。
参照图37和38,示出了传输系统12在第二中间位置。参照图39和40,示出了传输系统12在第三中间位置。参照图41至图43,示出了传输系统12处于第四中间位置。在这些组图中,传动系统12远离最小/最低传动比移动。这通过激活控制装置以使移动机构85旋转并使致动器59朝其最外位置向外移动来实现。
当皮带40在任何中间位置由第一皮带轮11支撑时,第二皮带轮111进行反作用,从而适当地支撑皮带40。
参照图44和45,示出了传动系统12在与最大/最高传动比有关的位置,其中每个致动器头部61a,61b在其最外位置。这也由图25表示,图25示出了每个致动器59尽可能在其最外位置。在该位置,每个致动器头部61a,61b的第一引导表面67与每个侧面组件17、19的最外侧的支撑表面单元33d的引导表面53相啮合。在该位置,所有支撑表面单元33每个都处于其第二位置,以最大直径支撑皮带40。
当皮带40以最大直径由第一皮带轮11支撑时,皮带轮的构造确保容纳皮带的凹槽25具有限制皮带40从皮带轮11脱离的能力。
当皮带40由最大直径的第一皮带轮11支撑时,皮带40由最小直径的第二皮带轮111支撑,如图44所示。
在该实施方式中,第二皮带轮111是反作用皮带轮,其中第二皮带轮111的操作由第一皮带轮11的操作决定。当第一皮带轮11通过驱动装置主动地移动到新的操作位置时。在驱动装置中,皮带40中张力的变化使第二皮带轮111起反应以将皮带40支撑在新的位置。
在反向操作中,如图46所示,使第一皮带轮11的支撑表面单元33返回其第一位置。当致动器59的头部61a,61b向内移动时,下面相邻的支撑表面单元33的销51进入致动器通道73的第二开口77。进一步向内运动导致销51啮合第二引导表面71。随着进一步向内运动,第二引导表面71的倾斜面作用在销51上,以使支撑表面单元33返回其第一位置。当支撑表面单元33处于第一位置时,销51在离开致动器通道73之前与致动器通道73的第一开口75对准,从而允许致动器59继续其向内运动。
当致动器59进一步向内移动时,随后的支撑表面单元33继续该运动顺序。
类似地,第二皮带轮111的支撑表面单元移动使得以较大的直径支撑皮带40。
从本实施方式的操作可以看出,当传动系统在最大/最高传动比和最小/最低传动比之间移动时,传动系统12在第一皮带轮11和第二皮带轮111上均呈现基本连续的支撑表面。此外,控制装置是可操作的,使得致动器59可以定位在它们的最下位置和最外位置(包括两端)之间的任何位置,并且可以保持在该位置。这样,支撑皮带的表面可以是最大直径和最小直径之间的任何直径。
考虑到自行车,现有技术中链条驱动的拨链器系统易于发生机械故障甚至失灵。其中包括当自行车受到冲击(例如,车手穿过道路上的孔洞或越过边缘)或过分激进的换档事件时,链条从链轮或链环上脱落的情况。最好的情况是,这些故障会导致极大的不便,导致比赛失利,或者最坏的情况是导致车手受伤。
之所以可能出现这种故障或失灵的原因是由于现有技术中由变速器驱动的带盒和链环系统的设计和构造并没有物理地迫使链条保持在适当的位置。本发明被设计成使得皮带相对不可能从前或后皮带轮上脱落,因为没有使用骑行轮,并且皮带轮的边缘在任何负载下都物理地约束皮带,包括由道路条件引起的冲击。这增加了骑行的安全性,提高了比赛中的竞争性。
本发明减轻了传动比改变期间的动力损失,因为在那些传动比改变期间提供了连续的动力传递。这不适用于在换挡(链环或链轮)过程中遭受动量损失的现有技术自行车的拨链器系统或任何其他分立的传动系统。
当在链环之间进行更换时,动量损失对于现有技术的拨链器尤其重要,该链环同时需要在带盒中进行相关联的多个链轮(通常为3-4)的更换,以避免从当前设置进行过多的传动比调节。
本实施方式可以通过在前曲柄组上单次触发向上或向下换档(使用现有的或专用的手柄杆安装的换档器硬件)来激活。后轮传动会自动调整到曲柄设置。现有技术的拨链器传动系统要求车手分别协调后链轮和前链环的变速,以在升档或降档期间实现连续换档,这不仅效率低下,还会导致动量损失,因为必须在3至4档之间更换链环时会被横越,但也会在疲劳或需要对比赛情况做出警告的情况下对车手施加压力。
本实施方式消除了后(带盒)和前(链环)改变的手动协调要求,从而使换挡更加简单。当车手疲劳时,这是特别理想的。本实施方式还消除了所有现有技术的链环和带盒组合中都存在的传动比重复,从而进一步简化了系统。
本实施方式消除了对传动系统润滑的需要,这减少了维护并且不损害驱动效率。本实施方式还在现有技术的拨链器系统可获得的最大和最小传动比上进行了扩展。
由于本实施方式是无级变速的,因此不再迫使车手使用现有技术传动系中固有的相当能量消耗较大的齿轮级。
本实施方式的效率优于现有技术系统的效率,因为当使用最小的链轮和使用交叉链齿轮设置时,传统系统效率低下。本实施方式的效率确保了将更多的在曲柄组处输入的车手能量传递到后轮。
在本发明的其他应用/实施方式中,本实施方式的许多上述优点也以一种形式或另一种形式实现。例如,随着档位的改变,档位之间的切换不再与动力的丧失/下降相关联。本发明允许传动比之间的平滑过渡,由此始终保持动力传递。它还允许在负载下换档。
本发明提供了一种传动系统,该传动系统具有相对窄的,固定宽度的皮带轮,该皮带轮能够被设计成具有几乎无限的传动比。这与当前的变径皮带轮系统相反,后者随着传动比的增加而必须增加宽度。
提供示例实施方式,使得本公开将是透彻的,并将本发明的范围完全传达给本领域技术人员。阐述了许多特定细节,例如特定组件,设备和方法的示例,以提供对本公开的实施方式的透彻理解。对于本领域技术人员将显而易见的是,不需要采用具体细节,示例实施方式可以以许多不同的形式来体现,并且都不应当被解释为限制本公开的范围。在一些示例实施方式中,未详细描述公知的过程,公知的设备结构和公知的技术。
本文所使用的术语仅是出于描述特定示例实施方式的目的,而不旨在进行限制。如本文所使用的,单数形式“一个”,“一种”和“该”也可以旨在包括复数形式,除非上下文另外明确指出。术语“包含”,“包含”,“包含”,“具有”或其变体是包括性的,因此指定存在所述特征,整数,步骤,操作,元素和/或组件,但不排除存在或增加一个或多个其他特征,整数,步骤,操作,元素,组件和/或其组。
当元件或层被称为在另一元件或层“上”,“啮合”,“连接”或“耦接到”另一元件或层时,它可以直接在另一元件或层上,啮合,连接或耦接到另一元件或层上。元件或层或中间元件或层可以存在。相反,当元件被称为“直接在”另一元件或层“上”,“直接啮合至”,“直接连接至”或“直接耦合至”另一元件或层时,可能不存在中间元件或层。应该以类似的方式来解释用于描述元件之间的关系的其他词语(例如,“在...之间”与“直接在...之间”,“相邻”与“直接相邻”等)。如本文所使用的,术语“和/或”包括一个或多个相关联列出的项目的任何和所有组合。
尽管术语第一,第二,第三等在本文中可用于描述各种元件,组件,区域,层和/或部分,但是这些元件,组件,区域,层和/或部分不应受到以下限制这些条款。这些术语仅可用于区分一个元素,组件,区域,层或部分与另一区域,层或部分。除非上下文明确指出,否则本文中使用的诸如“第一”,“第二”和其他数字术语之类的术语并不暗示顺序或次序。因此,在不脱离示例实施方式的教导的情况下,下面讨论的第一元件,组件,区域,层或部分可以被称为第二元件,组件,区域,层或部分。
为了便于描述,本文中将其用于描述一个元件或特征与另一元件或多个特征的关系,如图中所示。空间相对术语除了附图中描绘的方位之外,还可以意图涵盖设备在使用或操作中的不同方位。例如,如果附图中的装置被翻转,则被描述为在其他元件或特征“之下”或“之下”的元件将被定向为在其他元件或特征“之上”。因此,示例术语“在……下方”可以包括在……上方和在……下方两个方位。可以以其他方式定向设备(旋转90度或其他方向),并据此解释此处使用的空间相对描述语。
Claims (74)
1.一种传动系统,包括第一皮带轮和与其间隔开的输出端,缆绳在第一皮带轮和输出端之间延伸,使得第一皮带轮的运动引起输出的运动,第一皮带轮包括:
与第二侧面组件间隔开的第一侧面组件,第一侧面组件和第二侧面组件可旋转地固定在一起;
在第一侧面组件和第二侧面组件之间限定的可变环形凹槽,该环形凹槽适于容纳缆绳;
第一侧面组件和第二侧面组件中的每一个都提供用于支撑缆绳的支撑表面,该支撑表面可在第一位置和第二位置之间横向移动,第一位置与第二位置向外间隔开,当每个侧面组件的支撑表面处于第二位置时,第一侧面组件和第二侧面组件的支撑表面配合以啮合缆绳,于是缆绳从第一直径移动以被支撑为第二直径;
支撑表面包括多个支撑表面单元,其限定了支撑表面,每个支撑表面单元可以相对于彼此移动;
其中,当支撑表面在第一直径和第二直径之间移动时,第一皮带轮的宽度保持恒定,反之亦然。
2.根据权利要求1所述的传动系统,其特征在于,还包括至少一个致动器,用于使每个支撑表面在所述第一位置和所述第二位置之间移动,其中,所述至少一个致动器沿着所述第一皮带轮的径向可变地定位。
3.根据权利要求1或2所述的传动系统,其中,所述至少一个致动器包括通过桥接构件连接在其之间的第一致动器和第二致动器。
4.根据权利要求3所述的传动系统,其中,所述桥接构件将所述第一致动器和所述第二致动器保持为固定关系。
5.根据权利要求3或4所述的传动系统,其中,所述第一致动器与所述第一侧面组件的支撑表面配合,并且所述第二致动器同时与所述第二侧面组件的支撑表面配合,以使各支撑表面在两个第一位置和第二位置。
6.根据权利要求3、4或5所述的传动系统,其中,所述第一致动器和所述第二致动器中的至少一个或两个提供第一引导装置,以使所述支撑表面移动到所述第二位置,所述第一引导装置包括与支撑表面啮合的第一引导表面。
7.根据权利要求3至6中任一项所述的传动系统,其中,所述第一致动器和所述第二致动器中的至少一个或两者提供第二引导装置,以将所述支撑表面引导至所述第一位置,所述第二引导装置包括第二引导装置。引导表面,使支撑表面移动到第一位置。
8.根据权利要求7所述的传动系统,其中,所述第二引导表面包括致动器通道,所述致动器通道与所述支撑表面的一部分协作以使所述支撑表面移动至所述第一位置。
9.根据权利要求1至8中任一项所述的传动系统,其中,所述皮带轮包括控制装置,以控制所述至少一个致动器的运动,其中,所述控制装置约束所述至少一个致动器,使得所述至少一个致动器。致动器限于相对于每个侧面组件的径向运动。
10.根据权利要求9所述的传动系统,其中,所述控制装置包括至少一个支撑通道,所述至少一个支撑通道与所述至少一个致动器啮合以限制沿着所述至少一个支撑通道的运动,所述至少一个支撑通道相对于径向方向延伸。至少一个致动器相对于每个侧面组件被限制成相对于每个侧面组件的径向运动,该至少一个致动器沿着径向可变地定位。
11.根据权利要求9或10所述的传动系统,其中,所述控制装置包括支撑所述至少一个致动器的支撑壳体,所述支撑壳体包括背板和移动机构,所述背板位于支撑表面和移动机构之间的位置。
12.根据权利要求11所述的传动系统,其特征在于,所述背板结合有所述至少一个支撑通道,用于限制所述至少一个致动器在径向上的运动。
13.根据权利要求11或12所述的传动系统,其中,所述运动机构使所述至少一个致动器沿着所述径向运动。
14.根据权利要求11、12或13所述的传动系统,其中,所述运动机构包括可相对于所述背板旋转的引导板,其中,所述引导板的旋转使所述至少一个致动器沿着所述至少一个导向板的支撑通道运动。
15.根据权利要求14所述的传动系统,其中,所述运动机构包括马达和一系列齿轮,所述齿轮和一系列齿轮与所述导向板可旋转地协作以使所述至少一个致动器沿着所述径向运动。
16.根据权利要求14或15所述的传动系统,其特征在于,所述引导板为涡旋板的形式,所述涡旋板包括呈螺旋形的凹槽形式的螺旋形形式。
17.根据权利要求16所述的传动系统,其中,所述凹槽从邻近所述导向板的外周的第一端到邻近所述导向板的内周的第二端连续。
18.根据权利要求16或17所述的传动系统,其中,所述螺旋结构与所述至少一个致动器的端部啮合,由此,所述涡旋盘的旋转将导致所述至少一个致动器的端部沿着所述螺旋运动,从而导致至少一个致动器,以沿着背板中的至少一个支撑通道运动。
19.根据权利要求14或15所述的传动系统,其中,所述导向板包括至少一个凹槽,所述至少一个凹槽被定位成与所述背板的所述至少一个支撑通道相关联,所述至少一个凹槽与所述至少一个致动装置的一端啮合。
20.根据权利要求19所述的传动系统,其中,所述至少一个凹槽相对于所述至少一个支撑通道成角度地定向,使得所述导向板的旋转导致所述至少一个凹槽相对于所述至少一个支撑通道移动,所述至少一个致动器被所述至少一个凹槽迫使而移动,以沿着所述至少一个支撑通道径向地移动。
21.根据权利要求1至20中任一项所述的传动系统,其中,所述支撑表面包括布置成圆形构造的多个支撑段,其中,每个支撑段的整体外观是截头的扇形段的整体外观,每个支撑段都包括一个多个支撑表面单元的子集。
22.根据权利要求21所述的传动系统,其特征在于,每个单个支撑段的每个支撑表面单元彼此堆叠在一起。
23.根据权利要求22所述的传动系统,其中,最靠近所述皮带轮的旋转轴线定位的支撑表面单元是最小的内部支撑表面单元,此后每个支撑表面单元的长度增加。
24.根据权利要求21至23中任一项所述的传动系统,其中,每个支撑表面单元被限制为相对于相邻的支撑表面单元轴向运动。
25.根据权利要求21至24中任一项所述的传动系统,其中,每个支撑表面单元之间具有花键布置,其中,所述花键布置防止相邻支撑表面单元之间的切向运动。
26.根据权利要求21至25中任一项所述的传动系统,其中,每个支撑表面单元包括限制机构,以限制相邻的支撑表面单元之间的轴向运动,所述限制机构包括结合在每个支撑表面单元中的凸起,其中,所述凸起适于为了与相邻的支撑表面单元中的凹口配合,限制机构至少将支撑表面单元保持在第二位置,直到至少一个致动器使支撑表面单元移回到第一位置。
27.根据权利要求1至20中任一项所述的传动系统,其中,每个支撑表面包括多个支撑表面单元。
28.根据权利要求27所述的传动系统,其中,每个支撑表面单元可在所述第一位置和所述第二位置之间独立移动,每个支撑表面单元被限制为在所述第一位置和所述第二位置之间运动。
29.根据权利要求21至28中任一项所述的传动系统,其中,每个支撑表面单元适于与所述至少一个致动器协作地啮合,其中,所述至少一个致动器使每个支撑表面单元在所述第一位置和第二个位置之间移动。
30.根据权利要求21至29中任一项所述的传动系统,其中,所述至少一个致动器的第一引导表面啮合所述一个或多个支撑表面单元。
31.根据权利要求21至30中任一项所述的传动系统,其中,所述至少一个致动器的第二引导表面啮合所述一个或多个支撑表面单元。
32.一种传动系统,包括第一皮带轮和与其间隔开的输出端,缆绳在第一皮带轮和输出端之间延伸,使得第一皮带轮的运动引起输出端的旋转,第一皮带轮包括:
彼此隔开的第一侧面组件和第二侧面组件同轴安装并且可旋转地固定在一起;
在第一侧面组件和第二侧面组件之间的环形凹槽,该环形凹槽适于接收缆绳,使得缆绳由第一皮带轮以第一直径支撑;
第一侧面组件和第二侧面组件中的每一个均包括支撑表面,该支撑表面包括适于啮合缆绳的多个独立安装的支撑表面单元,每个支撑表面单元可在至少第一位置-其中缆绳处于第一直径处-和第二位置-其中缆绳处于第二直径处-之间横向移动,第二位置与第一位置向内隔开。
33.一种传动系统,包括第一皮带轮和与其间隔开的输出端,缆绳在第一皮带轮和输出端之间延伸,使得第一皮带轮的运动引起输出端的旋转,第一皮带轮包括:
彼此隔开的第一侧面组件和第二侧面组件同轴安装并且可旋转地固定在一起;
在第一侧面组件和第二侧面组件之间的环形凹槽,该环形凹槽适于容纳缆绳,使得缆绳由第一皮带轮支撑;
第一侧面组件和第二侧面组件中的每一个均包括支撑表面,该支撑表面包括多个支撑表面单元,每个支撑表面单元可相对于彼此移动,该支撑表面可横向移动,该支撑表面可选择性地在至少第一位置和第二位置之间移动,第二位置与第一位置向内隔开,其中,支撑表面的全部或任何部分可以处于第一位置或第二位置,支撑表面适于与缆绳相啮合,其中当每个侧面组件的整个支撑表面处于第一位置时,缆绳被支撑在第一皮带轮的第一直径处,当每个侧面组件的整个支撑表面处于第二位置时,缆绳被支撑在第二个位置上直径,当每个侧面组件的支撑表面的第一部分处于第一位置,并且支撑表面的第二部分处于第二位置时,缆绳被支撑在具有第三直径的第一皮带轮上,第三直径为在第一直径和第二直径之间的直径。
34.根据权利要求33所述的传输系统,其中,所述支撑表面被选择性地定位,使得所述缆绳被支撑在所述第一直径与所述第二直径之间的任何尺寸的直径上。
35.根据权利要求33或34所述的传动系统,其中,每个支撑表面单元可在至少第一位置和第二位置之间横向移动,所述多个支撑表面单元协作以提供所述支撑表面,从而所述支撑体的选择性运动。表面单元使缆绳过渡位于第一皮带轮的不同直径之间。
36.根据权利要求35所述的传动系统,其中,在每个所述支撑表面单元从所述第一位置移动到所述第二位置的过程中,所述缆绳被支撑在呈现出不断增大的直径的所述第一皮带轮上,并且其中,从第二位置到第一位置的支撑表面单元,缆绳被支撑在呈现出不断减小的直径的第一皮带轮上。
37.根据权利要求33所述的传动系统,其中,所述支撑表面包括多个支撑表面段,其中,每个支撑表面段提供一个或多个支撑表面单元,所述支撑表面段采取扇形段的形状,使得所述组合结构的多个支撑表面段是圆形的。
38.根据权利要求35、36或37所述的传输系统,其中,每个支撑表面单元提供至少一个适于与所述缆绳啮合的接触表面,每个接触表面从所述支撑表面单元沿大体上中央的方向横向地延伸,所述接触表面第一侧面组件偏离第二侧面组件的相应接触表面。
39.根据权利要求38所述的传动系统,其特征在于,每个支撑表面单元向第二位置的运动导致第一侧面组件的接触表面的一部分被接收在第二侧面组件的径向相邻的接触表面之间。
40.根据权利要求33至40中任一项所述的传动系统,其中,缆绳在所述第一皮带轮和所述输出之间延伸,使得所述缆绳部分地围绕所述皮带轮并且部分地围绕所述输出回路。
41.根据权利要求40所述的传动系统,其中,所述缆绳为连续带的形式,所述连续带摩擦地啮合所述第一皮带轮,所述缆绳具有适于被所述第一侧面组件和所述第二侧面组件中的每一个的所述支撑表面支撑的面。侧面组件,其中皮带的横截面为V形,可以截断。
42.根据权利要求41所述的传动系统,其中,所述支撑面支撑至少75%的所述V形面。
43.根据权利要求41或42所述的传动系统,其中,所述皮带的横截面轮廓在张紧状态和松弛状态之间变化,其中张紧状态,其中轮廓代表狭窄的V形,松弛状态,其中轮廓代表较宽的V形,皮带采用当皮带轮跨在皮带轮与输出之间时,皮带处于张紧状态,皮带与皮带轮啮合时,皮带与输出皮带啮合时,皮带处于松弛状态。
44.根据前述权利要求中任一项所述的传动系统,其中,所述输出为第二皮带轮的形式,所述第二皮带轮是所述第一皮带轮的较小或较大的版本。
45.根据权利要求33至44中任一项所述的传动系统,其中,所述第一皮带轮包括致动装置,以使每个侧面组件的支撑表面单元在所述第一位置和所述第二位置之间运动。
46.根据权利要求45所述的传动系统,其中,所述第二皮带轮对所述第一皮带轮的每个侧面组件的所述至少一个环的运动做出反应。
47.根据权利要求43或44所述的传动系统,其中,所述第二皮带轮包括致动装置,以致使每个侧面组件的所述至少一个环在所述第一位置和所述第二位置之间运动,所述第一皮带轮对所述皮带轮的运动做出反应。第二皮带轮的每个侧面组件的支撑表面单元。
48.根据权利要求45所述的传动系统,其中,所述致动装置包括至少一个引导装置,其中,所述至少一个引导装置在所述第一位置和所述第二位置之间选择性地移动所述支撑表面单元。
49.根据权利要求48所述的传动系统,其中,所述至少一个引导装置由至少一个致动器提供,所述至少一个致动器包括以固定关系保持的第一致动器头和第二致动器头。
50.根据权利要求59所述的传动系统,其中,每个致动器头以第一引导装置和第二引导装置的形式提供至少一个引导装置。
51.根据权利要求50所述的传动系统,其中,所述第一引导装置使所述支撑表面移动到所述第二位置,所述第一引导装置包括与所述支撑表面的每个支撑表面单元啮合的第一引导表面。
52.根据权利要求50或51所述的传动系统,其中,所述第二引导装置将所述支撑表面引导至所述第一位置,所述第二引导装置包括使所述支撑表面移动至所述第一位置的第二引导表面。
53.根据权利要求52所述的传动系统,其中,所述第二引导表面包括致动器通道,所述致动器通道与每个支撑表面单元的一部分协作以使所述支撑表面移动至所述第一位置。
54.根据权利要求45至53中任一项所述的传动系统,其中,所述激活装置包括控制装置,以控制所述至少一个致动器的运动,所述控制装置约束所述至少一个致动器,使得所述至少一个致动器。致动器限于相对于每个侧面组件的径向运动。
55.根据权利要求43至54中任一项所述的传动系统,其中,所述传动系统布置成使得当所述第一皮带轮从所述第一直径移动到所述第二直径时,所述第二皮带轮从所述第二直径移动到所述第一直径。
56.一种传动系统,该传动系统包括第一皮带轮和与其间隔开的输出端,缆绳在第一皮带轮和输出端之间延伸,使得第一皮带轮的运动引起输出端的旋转,第一皮带轮包括:
彼此隔开的第一侧面组件和第二侧面组件同轴安装并且可旋转地固定在一起;
在第一侧面组件和第二侧面组件之间的环形凹口,该环形凹口适于容纳缆绳,使得缆绳由第一皮带轮支撑;
第一侧面组件和第二侧面组件中的每一个均包括由多个环提供的支撑表面,其中第一侧面组件上的环的直径与第二侧面组件上的环的直径不同,并且第二侧面组件上的环具有在第一侧面组件上的偏移对应环,其中对应环在至少第一位置和第二位置之间移动,第二位置与第一位置向内隔开,对应环适于啮合缆绳,其中当对应环处于在第二位置,缆绳由第一皮带轮以与相邻的相应环所限定的直径不同的直径支撑,每个环包括多个支撑表面单元,每个环的每个支撑表面单元可通过至少一个致动器独立地移动。
57.一种传动系统,该传动系统包括第一皮带轮,该第一皮带轮通过缆绳连接至输出端,使得该第一皮带轮的运动引起该输出端的旋转,该第一皮带轮包括:
在第一皮带轮的第一侧和第一皮带轮的第二侧之间的环形凹槽,该环形凹槽适于容纳缆绳,使得缆绳由第一皮带轮支撑;
一对支撑表面位于环形凹槽中,该对支撑表面可在一定间隔状态下相对于皮带轮的侧面在横向方向上移动,其中第一皮带轮处于第一直径,并且该对支撑表面具有啮合状态,其中第一皮带轮处于第二直径,并且一对支撑表面支撑线缆,第二直径大于第一直径。
58.可变直径皮带轮,该皮带轮包括:
环形凹槽,用于容纳缆绳,使得缆绳在皮带轮的第一直径处由皮带轮支撑;
一对支撑表面位于环形凹槽中,该对支撑表面在横向方向上可在间隔状态和啮合状态之间移动,其中,间隔状态是一对支撑表面不与缆绳啮合,而啮合状态是一对支撑表面在皮带轮的第二直径处支撑缆绳,第二直径大于第一直径。
59.一种变径皮带轮,该皮带轮包括:
环形凹槽,用于在皮带轮的第一直径处容纳缆绳;
环形凹槽提供了一个支撑表面,用于在将缆绳容纳在其中时支撑该缆绳,该支撑表面可移动以具有第一直径和第二直径;
其中,支撑表面可定位成具有第一直径和第二直径之间的任何直径。
60.根据权利要求58或59所述的皮带轮,其中,当所述支撑表面被容纳在所述皮带轮上时,所述支撑表面对所述缆绳呈现出基本上连续的表面。
61.根据权利要求58、59或60所述的皮带轮,其中,所述支撑表面的横截面轮廓与所述缆绳的与所述支撑表面啮合的部分的横截面形状互补,使得所述缆绳被保持在所述环形凹部中。
62.根据权利要求58至61中任一项所述的皮带轮,其中,当所述支撑表面在所述第一直径和所述第二直径之间移动时,所述缆绳在被支撑在其上时保持在相同的径向平面中。
63.根据权利要求58至62中任一项所述的皮带轮,其中,所述支撑表面由第一组支撑表面单元和第二组支撑表面单元形成,每个支撑表面单元可相对于彼此移动。
64.根据权利要求63所述的皮带轮,其中,所述第一组支撑表面单元和所述第二组支撑表面单元可在间隔状态之间沿横向方向移动,其中,所述缆绳可被支撑在所述皮带轮的第一直径处,并且啮合状态,其中缆绳可以被支撑在皮带轮的第二直径处,从而在这组支撑表面单元在间隔状态和啮合状态之间移动期间,缆绳被支撑在呈现变化直径的支撑表面上。
65.根据权利要求64所述的皮带轮,其中,周向相邻的支撑表面单元限定不连续的环,其中,在同一环的相邻支撑表面单元之间限定有间隙,所述第一组支撑表面单元的每个环具有与所述第二支撑表面单元的互补环。一组支撑表面单元,从而互补的环彼此呈交错关系以提供一个环对,随后每个环对的啮合提供了用于与缆绳啮合的支撑表面。
66.根据权利要求63、64或65所述的皮带轮,其中,每个支撑表面单元是楔形的,以提供与所述缆绳啮合的倾斜的接触表面。
67.根据权利要求58至66中任一项所述的皮带轮,其中,所述皮带轮包括:第一侧面壳体,其用于容纳所述第一组支撑表面单元;第二侧面壳体,其用于容纳所述第二组支撑表面单元;所述第一侧面壳体;以及第二侧壳体相对于彼此同轴安装,以在它们之间限定环形凹槽。
68.根据权利要求58至67中任一项所述的皮带轮,其特征在于,还包括致动装置,以使所述环对在所述第一位置和所述第二位置之间运动,所述致动装置包括多个致动器,所述致动器可在径向方向上在两个位置之间移动。皮带轮中心的第一位置和皮带轮的外径附近的第二位置。
69.根据权利要求68所述的皮带轮,其特征在于,每个致动器具有第一头和第二头,所述第一头适于使所述第一侧面组件的支撑表面单元运动,所述第二头适于使所述第二侧面组件的所述支撑表面单元运动。当每个致动器在位置之间移动时,在组装第一组件和第二组件时,第一头部和第二头部通过在它们之间延伸的桥相互连接,使得它们彼此保持固定关系。
70.根据权利要求68或69所述的皮带轮,其中,每个致动器被支撑在所述第一侧壳体和第二侧壳体中的相应通道中,所述多个致动器以星形网状布置彼此径向地间隔开。
71.根据权利要求68、69或70所述的皮带轮,其中,当每个致动器的头部在沿径向向外的方向移动时,在每个致动器的头部与所述每个支撑表面单元相啮合之后,以及在所述致动装置的头部移动到其第二位置之后。当沿径向向内方向移动时,每个致动器的头部连续地通过每个支撑表面单元,每个支撑表面单元移回到其第一位置。
72.根据权利要求68至71中的任一项所述的皮带轮,其中,所述致动装置还包括提供导向板的控制装置,其中,每组支撑表面单元均具有可相对于其旋转的导向板。
73.根据权利要求72所述的皮带轮,其中,所述致动器的每个端部包括可旋转的轮,其中,所述轮被容纳在所述导向板的导向装置中,所述导向装置为螺旋形,使得当所述导向板旋转时,每个轮都围绕旋转螺旋形引导件,其中,引导板的旋转使致动器沿由结合在第一壳体和第二壳体中的每一个中的径向通道指示的径向方向移动,其中致动器的移动引起支撑表面单元的移动在第一位置和第二位置之间。
74.一种传动系统,该传动系统包括根据权利要求58至73中的任一项所述的可变直径皮带轮,该皮带轮通过皮带连接至输出,使得所述皮带轮的运动引起所述输出的旋转,所述致动装置由马达致动。其中,马达由位于传动系统空间足迹内的电源供电,例如位于曲柄臂或主轴内。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AU2017902759A AU2017902759A0 (en) | 2017-07-13 | A Pulley and Transmission System | |
| AU2017902759 | 2017-07-13 | ||
| AU2017903939A AU2017903939A0 (en) | 2017-09-28 | A Pulley and Transmission System | |
| AU2017903939 | 2017-09-28 | ||
| PCT/AU2018/050724 WO2019010539A1 (en) | 2017-07-13 | 2018-07-13 | PULLEY AND TRANSMISSION SYSTEM |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111448405A true CN111448405A (zh) | 2020-07-24 |
Family
ID=65000959
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880058821.7A Pending CN111094798A (zh) | 2017-07-13 | 2018-07-13 | 皮带轮和传动系统 |
| CN201880058814.7A Pending CN111448405A (zh) | 2017-07-13 | 2018-07-13 | 皮带轮和传动系统 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880058821.7A Pending CN111094798A (zh) | 2017-07-13 | 2018-07-13 | 皮带轮和传动系统 |
Country Status (4)
| Country | Link |
|---|---|
| EP (2) | EP3652468A4 (zh) |
| CN (2) | CN111094798A (zh) |
| AU (2) | AU2018299208A1 (zh) |
| WO (2) | WO2019010539A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112096775A (zh) * | 2020-09-23 | 2020-12-18 | 同济大学 | 一种恒压活塞式颗粒阻尼器 |
| CN114586508A (zh) * | 2022-02-10 | 2022-06-07 | 河源市陈氏华兴农业发展有限公司 | 播种速度调节机构及播种机 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6994148B2 (ja) * | 2019-08-26 | 2022-01-14 | 遼太 高橋 | 無段変速機 |
| WO2022198163A1 (en) * | 2021-03-13 | 2022-09-22 | Hacking Sean Colin | Sectioned multiple-step pulley transmission |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH680941A5 (en) * | 1988-06-15 | 1992-12-15 | Carl Victor Schaeppi | Stepped gear train for toothed belt - has segmented toothed discs moving to and from centre to change overall disc dia |
| US5468191A (en) * | 1993-04-30 | 1995-11-21 | Ntn Corporation | Variable effective diameter pulleys for variable speed transmission of power |
| EP1460309A2 (de) * | 2003-03-15 | 2004-09-22 | Hans Schöller | Stufenlos einstellbares Getriebe |
| US20050233846A1 (en) * | 2002-08-12 | 2005-10-20 | Green Arthur G | Variable radius continuously variable transmission |
| US20120040788A1 (en) * | 2008-04-08 | 2012-02-16 | Yoon Kyu Cho | Belt-type continuously variable transmission |
| CN103282694A (zh) * | 2010-12-29 | 2013-09-04 | 赵闰奎 | 链带式无级变速器 |
| CN106461036A (zh) * | 2014-03-31 | 2017-02-22 | 庞巴迪动力产品公司 | 无级变速器主动带轮 |
| WO2017070736A1 (en) * | 2015-10-26 | 2017-05-04 | Treadlie Engineering Pty Ltd | A transmission system |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US601660A (en) * | 1898-04-05 | Expansible pulley | ||
| US2702484A (en) * | 1950-10-18 | 1955-02-22 | James D Arata | Upsilon-belt speed changer |
| WO1979000522A1 (en) * | 1978-01-18 | 1979-08-09 | R Williams | Drive system |
| US4608034A (en) * | 1984-03-27 | 1986-08-26 | Reswick James B | Variable speed ratio drive |
| US4652250A (en) * | 1984-03-27 | 1987-03-24 | Reswick James B | Variable speed ratio drive |
| JPH01299355A (ja) * | 1988-05-25 | 1989-12-04 | Hiroyuki Sakami | 分割プーリー式無段変速機 |
| US4938732A (en) * | 1989-06-13 | 1990-07-03 | Gkn Automotive, Inc. | Continuously variable transmission system having variable diameter pulley assemblies responsive to axially directed forces |
| US5405158A (en) * | 1993-09-27 | 1995-04-11 | Wilding; Brian | Variable ratio belt drive system |
| US5582555A (en) * | 1995-09-05 | 1996-12-10 | Miller; Dennis J. | Continuously variable transmission |
| CA2652120C (en) * | 2004-05-19 | 2013-08-27 | Anthony Wong | Synchronized segmentally interchanging pulley transmission system |
| JP5713994B2 (ja) * | 2009-04-07 | 2015-05-07 | キュ ゾ,ユン | ベルト式無段変速機 |
| CN104100688B (zh) * | 2013-04-02 | 2017-10-20 | 王国斌 | 一种活齿传动总成中的活齿滑片滑块组合设计方法 |
| ITUB20154124A1 (it) * | 2015-10-02 | 2017-04-02 | Yves Joseph Alfred Morin | Trasmissione a catena, particolarmente per biciclette, con variazione continua del rapporto di trasmissione. |
| CN106015482B (zh) * | 2016-08-17 | 2018-08-31 | 丁震中 | 一种机械式可变链轮无级变速器 |
| CN106379479A (zh) * | 2016-11-18 | 2017-02-08 | 朱爱霞 | 一种自行车自动变速器及传动系统 |
-
2018
- 2018-07-13 CN CN201880058821.7A patent/CN111094798A/zh active Pending
- 2018-07-13 CN CN201880058814.7A patent/CN111448405A/zh active Pending
- 2018-07-13 WO PCT/AU2018/050724 patent/WO2019010539A1/en unknown
- 2018-07-13 WO PCT/AU2018/050728 patent/WO2019010541A1/en unknown
- 2018-07-13 AU AU2018299208A patent/AU2018299208A1/en not_active Abandoned
- 2018-07-13 EP EP18831399.3A patent/EP3652468A4/en not_active Withdrawn
- 2018-07-13 EP EP18831892.7A patent/EP3652469A4/en not_active Withdrawn
- 2018-07-13 AU AU2018299210A patent/AU2018299210A1/en not_active Abandoned
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH680941A5 (en) * | 1988-06-15 | 1992-12-15 | Carl Victor Schaeppi | Stepped gear train for toothed belt - has segmented toothed discs moving to and from centre to change overall disc dia |
| US5468191A (en) * | 1993-04-30 | 1995-11-21 | Ntn Corporation | Variable effective diameter pulleys for variable speed transmission of power |
| US20050233846A1 (en) * | 2002-08-12 | 2005-10-20 | Green Arthur G | Variable radius continuously variable transmission |
| EP1460309A2 (de) * | 2003-03-15 | 2004-09-22 | Hans Schöller | Stufenlos einstellbares Getriebe |
| US20120040788A1 (en) * | 2008-04-08 | 2012-02-16 | Yoon Kyu Cho | Belt-type continuously variable transmission |
| CN103282694A (zh) * | 2010-12-29 | 2013-09-04 | 赵闰奎 | 链带式无级变速器 |
| CN106461036A (zh) * | 2014-03-31 | 2017-02-22 | 庞巴迪动力产品公司 | 无级变速器主动带轮 |
| WO2017070736A1 (en) * | 2015-10-26 | 2017-05-04 | Treadlie Engineering Pty Ltd | A transmission system |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112096775A (zh) * | 2020-09-23 | 2020-12-18 | 同济大学 | 一种恒压活塞式颗粒阻尼器 |
| CN112096775B (zh) * | 2020-09-23 | 2021-09-03 | 同济大学 | 一种恒压活塞式颗粒阻尼器 |
| CN114586508A (zh) * | 2022-02-10 | 2022-06-07 | 河源市陈氏华兴农业发展有限公司 | 播种速度调节机构及播种机 |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019010539A9 (en) | 2019-02-14 |
| EP3652468A4 (en) | 2021-08-18 |
| WO2019010541A9 (en) | 2019-03-07 |
| WO2019010539A1 (en) | 2019-01-17 |
| EP3652469A1 (en) | 2020-05-20 |
| AU2018299208A1 (en) | 2020-03-05 |
| EP3652468A1 (en) | 2020-05-20 |
| AU2018299210A1 (en) | 2020-03-05 |
| WO2019010541A1 (en) | 2019-01-17 |
| EP3652469A4 (en) | 2021-08-18 |
| CN111094798A (zh) | 2020-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111448405A (zh) | 皮带轮和传动系统 | |
| US9855993B2 (en) | Variable diameter pulley assembly and continuously variable transmission using the same | |
| US4781663A (en) | Torque responsive automatic bicycle transmission with hold system | |
| US20050233846A1 (en) | Variable radius continuously variable transmission | |
| US4701152A (en) | Automatic transmission for multi-speed bicycle | |
| US8944945B2 (en) | Chain tensioner | |
| EP0687347B1 (en) | Variable ratio drive mechanism | |
| US6432009B1 (en) | Continuously variable transmission | |
| KR102147025B1 (ko) | 자전거용 무단변속장치 | |
| US20210262562A1 (en) | Continuously variable transmission for recreational vehicles and related components | |
| AU2016345061A1 (en) | A transmission system | |
| US9234573B2 (en) | Spiral bicycle sprocket | |
| EP0116731A1 (en) | Automatic transmission having a continuously variable drive ratio | |
| KR101348822B1 (ko) | 자전거용 무단변속장치 | |
| WO2005088165A2 (en) | Drive for (semi-)continuous drives having an endless belt | |
| US20240149975A1 (en) | Sectioned Multiple-Step Pulley Transmission | |
| US8790199B2 (en) | Radial diaphragm spring clutch | |
| US11945546B2 (en) | Bicycle drivetrain | |
| US10094452B1 (en) | Continuously variable transmission for a bicycle | |
| GB2565318A (en) | Toothed V-belt CVT | |
| WO2014120031A1 (en) | Variable ratio transmission element and system comprising the variable ratio transmission element | |
| AU2007211937B2 (en) | Infinitely variable transmission | |
| WO2024097703A2 (en) | Continuously variable transmission for a bicycle | |
| CN1114277A (zh) | 无级变速踏板式自行车传动装置 | |
| ITPZ20120008A1 (it) | Variatore di velocita' continuo adattativo ad alte prestazioni |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20200724 |