CN111225821A - 用于充电装置的组件和具有该组件的充电装置 - Google Patents
用于充电装置的组件和具有该组件的充电装置 Download PDFInfo
- Publication number
- CN111225821A CN111225821A CN201880063189.5A CN201880063189A CN111225821A CN 111225821 A CN111225821 A CN 111225821A CN 201880063189 A CN201880063189 A CN 201880063189A CN 111225821 A CN111225821 A CN 111225821A
- Authority
- CN
- China
- Prior art keywords
- arm
- assembly
- charging
- housing
- contact element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000008878 coupling Effects 0.000 claims abstract description 52
- 238000010168 coupling process Methods 0.000 claims abstract description 52
- 238000005859 coupling reaction Methods 0.000 claims abstract description 52
- 238000000034 method Methods 0.000 claims abstract description 11
- 230000000712 assembly Effects 0.000 claims abstract description 3
- 238000000429 assembly Methods 0.000 claims abstract description 3
- 230000007246 mechanism Effects 0.000 description 15
- 230000008901 benefit Effects 0.000 description 13
- 238000006073 displacement reaction Methods 0.000 description 5
- 238000007789 sealing Methods 0.000 description 5
- 239000000725 suspension Substances 0.000 description 5
- 230000002093 peripheral effect Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 238000011109 contamination Methods 0.000 description 3
- 239000000463 material Substances 0.000 description 3
- 229910052751 metal Inorganic materials 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical group [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000000428 dust Substances 0.000 description 2
- 230000005484 gravity Effects 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 239000013618 particulate matter Substances 0.000 description 2
- 230000002787 reinforcement Effects 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 238000002604 ultrasonography Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 244000208734 Pisonia aculeata Species 0.000 description 1
- 244000007853 Sarothamnus scoparius Species 0.000 description 1
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000006978 adaptation Effects 0.000 description 1
- AZDRQVAHHNSJOQ-UHFFFAOYSA-N alumane Chemical group [AlH3] AZDRQVAHHNSJOQ-UHFFFAOYSA-N 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 238000004512 die casting Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000006260 foam Substances 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 239000002245 particle Substances 0.000 description 1
- 230000003014 reinforcing effect Effects 0.000 description 1
- 239000000565 sealant Substances 0.000 description 1
- 229910052710 silicon Inorganic materials 0.000 description 1
- 239000010703 silicon Substances 0.000 description 1
- 150000003377 silicon compounds Chemical class 0.000 description 1
- 239000011343 solid material Substances 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images



























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/35—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/35—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles
- B60L53/37—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles using optical position determination, e.g. using cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
- B60L50/66—Arrangements of batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/14—Conductive energy transfer
- B60L53/16—Connectors, e.g. plugs or sockets, specially adapted for charging electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
-
- H02J7/0027—
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0042—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0042—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction
- H02J7/0045—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction concerning the insertion or the connection of the batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/12—Electric charging stations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Sustainable Development (AREA)
- Sustainable Energy (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
本发明涉及一种用于物体与蓄电池的电能交换、特别是用于给蓄电池(例如,电动车辆的蓄电池)充电的充电装置的第一组件(1),所述第一组件(1)包括接触元件(2),其中所述接触元件(2)可以连接到第二组件的耦合元件以产生电气连接。根据本发明,底座(5)和布置在所述底座(5)上的臂(6)被提供,其中所述臂(6)被安装在所述底座(5)上,以使得所述臂(6)可以围绕和/或沿着多个轴线移动,以便相对于耦合元件引导接触元件(2)。本发明还涉及一种具有这种类型的组件以及具有啮合元件的第二组件的充电装置,其中所述组件(1)中的一个被以固定的方式固定。本发明进一步涉及第一组件(1)的用途以及用于给装置充电的方法。
Description
本发明涉及用于物体与蓄电池的电能交换、特别是用于给蓄电池(例如,电动车辆的蓄电池)充电的充电装置的第一组件,其中第一组件包括接触元件,其中接触元件可以连接到第二组件的耦合元件以产生电气连接。
本发明还涉及用于给装置(特别是可移动装置,诸如电动车辆)充电的、具有这种类型的第一组件的充电装置。
另外,本发明涉及这种类型的第一组件的用途或充电装置的用途。
最后,本发明涉及用于给装置(特别是可移动装置,诸如电动车辆)充电的方法,其中装置被定位用于充电,在充电之后,与电压源产生电气连接,以便给装置的蓄电池充电。
从现有技术中已知用于给蓄电池充电的种类繁多的充电设备。除了家庭领域中熟悉的具有相对较小的尺寸的充电装置之外,还已知特别是在电动车辆领域中使用的明显大很多的充电站。由于电动车辆在车辆市场中的相对份额越来越大,预期充电站的较高的本地可用性将变得必要。
如今,停车场在一些情况下已经配备有用于在电动车辆停放时给电动车辆充电的电气连接。在未来,停车场的每个单个的停车位可能需要具有用于电动车辆的充电装置。
因此,独立于用户和/或以自动的方式执行充电的能力可能变为必要。这主要适用于期望具有大功率的充电的情况。目前已经被设想了高达800kW的充电功率。这样的充电功率可以被实现,但是需要具有大直径的电缆,这种电缆很重,因此只有用户用相应的努力才能够操作。
特别是在对于自驾驶的、但是将独立于用户的操作准备就绪状态下、尽可能一致地可用的车辆的自主操作(例如,对于汽车共享)也出现在前一段中提到的对于自动化充电过程的要求。
就目前的用于电动车辆的充电装置或充电站而言,人工干预是必要的。这意味着,用户必须确保充电装置与他/她自己所有的电动车辆的电气连接。然而,如果例如与电压源的自动连接可以在电动车辆正被停放在停车场的停车位中时的任何时间产生,以使得电动车辆的一个蓄电池或多个蓄电池可以被充电,和/或使得如果能量将被反馈,则能量一般可以被交换,那么将会更有效率。
从WO 2016/119000 A1,已经部分地满足对于尽可能地自动化的充电的需求的充电装置已经变为已知。对应的充电装置由两个部分构成。充电装置包括布置在地面端的固定的第一组件,该组件包括可以被移动的圆锥形插头。第二组件被附连到电动车辆,优选地附连在车身底部上。该第二组件包括具有基本上对应于插头的多个圆锥形插座的板。如果具有这种类型的第二组件的电动车辆随后停放在配备有第一组件的停车位中,则第一组件可以被延伸,并且被连接到第二组件。因为互补圆锥形实施方案和电动车辆的底部的板上的多个可能的接触可能性,因此可以实现自动积极配合,从而可能产生电气连接。然而,在这种情况下不利的是,电动车辆的底部上的板需要具有相对大的尺寸,以使得即使在电动车辆没有被准确地停放在第一组件上方时,也可以产生电气连接。因此,为了使容限范围更大以及即使在电动车辆被不精确地停放的情况下也可能充电,对于车辆相对较重的模块或者很大的板的缺点必须被接受。
基于前述,本发明的目的是提供一种消除以上说明的缺点的第一组件。
进一步的目的是提供一种具有这种类型的充电装置。
另一个目的是提供一开始命名的类型的第一组件的用途以及充电装置的用途。
最后,本发明的目的是进一步开发一开始命名的类型的方法,以使得能够用相对简单的构造对电动车辆充电。
如果底座和布置在其上的臂与一开始命名的类型的第一组件一起被提供,则实现本发明的目的,其中臂被安装在底座上,以使得它可以围绕和/或沿着多个轴线移动,以便将接触元件引导到耦合元件。
本发明实现的一个优点特别可以体现在作为具有底座和布置在其上并且被安装为使得它可以围绕和/或沿着多个轴线移动的臂的所选实施方案的结果,接触元件可以被以比以前大的自由度移置,这使得第二组件可以被构造具有几个接触元件或者甚至仅仅一个接触元件。因此,第二组件可以就空间和重量而言最小化。因此,第一组件通常被以固定的方式安装在例如停车场中,而第二组件被定位在电动车辆上。然而,还可能的是,该安装情形被反过来,也就是说,具有臂的第一组件被附连到车辆,而第二组件被以固定的方式提供在停车位中。可以以任何期望的方式选择相对布置。例如,第二组件可以被横向地附连到电动车辆;然后第一组件的臂横向于第二组件的耦合元件移动以用于充电。然而,特别优选的是以下配置或安装情形,在该配置或安装情形中,第一组件被以固定的方式安装在停车位中,并且第二组件沿着车身底部的区域或者在车身底部的区域内被附到电动车辆。然后,电动车辆可以被停放在停车位中,并且充电可以从地面端发生。这提供了第一组件在充电期间也被很大程度地保护而不受天气的影响的优势。
为了臂与接触元件的必要的移动性,如果臂被安装在底座上以使得它可以被水平地枢转,则是有利的。然后,臂可以在通常平行于地面延展的平面上被旋转。因此,第一枢转轴线垂直于底座延伸。原则上,由此可以提供的是,第一枢转轴线使得臂可以围绕底座完全旋转,也就是说,枢转能力覆盖360°的角度。然而,为了实用的目的,如果对应的枢转范围从-90°到90°、优选地从-60°到60°,则是完全足够的。因此,确保了臂可以补偿当电动车辆被停放时沿着足够的弧形的定位不准确。
如上所述,臂的枢转范围可以被构造为与臂的初始位置对称。尤其是驱动器被提供在用于臂或其的至少部分的直线移动的情况下,出于低的设计,臂可以被挨着该驱动器布置,优选地被布置在相同的高度。臂于是可以位于与直线驱动器相同的高度处,但是挨着直线驱动器安置。在这种情况下,臂也可以被构造具有相对于初始位置不对称的枢转范围。如果臂在驱动器的方向上可以被枢转地更远(例如,远至-50°),而在相反方向上被枢转地不是这么远(例如,远至30°),则是有利的。
除了围绕第一枢转轴线的枢转能力之外,还优选地提供的是,臂作为整体或者至少在部分中是可纵向移置的。通过底座上的和/或相对于底座的对应的附加的可移置性,结合围绕第一枢转轴线的枢转能力,可以覆盖更大的范围。换句话说,接触元件可以在大的平面区域内被接近。电动车辆的停放期间的容限范围因此得到提高,因为接触元件和耦合元件之间的可能更大的距离可以通过臂或其的一部分的直线移动而被桥接。
臂可以被安装为使得它是可完全移置的。例如,臂可以在马达的帮助下被沿着直线移动。然而,还可能的是,臂被构造为伸缩臂。臂的第一端部于是在操作期间相对于直线移动保持静止,而具有接触元件的第二端部被直线地延伸。还可能的是,仅臂的一段被构造为是可直线移动的。在这样的实施方案中,枢转移动可以经由第一段被发起,并且直线可移置性可以经由以固定的方式与第一段共转的第二段被发起。在所有的实施方案中,焦点最终集中于接触元件被带到合适的位置以用于经由枢转移动和直线移置连接到耦合元件的能力。因此,臂被构造为使得这些不同的移动影响(特别是直接影响)接触元件的位置。
有利地,第一驱动器被提供,通过第一驱动器,臂可以被直线地移置。该驱动器可以例如是经由心轴提供臂的直线可移置性的马达。其他实施方案也是可能的,例如,具有与齿条啮合以便使臂移动的齿轮机构的马达。经由齿带的驱动器也是可能的;伺服马达也可以被替换地用于该目的。原则上,可以影响臂或其的至少一部分的期望的直线推进的任何装置都是合适的。
此外,可以提供的是,臂被安装在底座上以使得它可以围绕第二枢转轴线被垂直枢转。围绕第二枢转轴线的对应的安装有利于使得臂上的接触元件可以被以简单的方式升高和下降。通过臂的直线可移置性与围绕第一枢转轴线的枢转能力的结合,接触元件可以被定位在第二组件的耦合元件的区域中。为了桥接高度距离,原则还可以提供的是,臂的可单独移动的部分被按直线向上移动,但是必要的距离桥接可以经由臂的枢转移动通过简单的装置来实现(如果存在足够的稳定性的话)。
在该上下文下,可以提供的是,第二驱动器被提供用于臂的垂直枢转。第二驱动器可以包括电机。电机可以驱动使臂升高或下降的调整装置。调整装置可以例如是心轴,心轴连接到与臂啮合并且与心轴连接的固定的推动元件。然而,如果一个或更多个气体弹簧被提供用于臂的垂直枢转,其中气体弹簧连接到心轴(而不是固定的推动元件),则是特别优选的。定位传感器从而也可以被提供。例如,就这一点而言,霍尔传感器可以被用于定位。气体弹簧提供以下优点,即,接触压力可以被调整,例如,被调整到50%,并且气体弹簧随后是可缩性的。因此,车辆高度的变化(例如由于不同的负载)可以在向上的方向以及向下的方向这两个方向上被补偿。几厘米的高度变化因此可以被均衡化。代替气体弹簧(一个或更多个),其他弹性元件也可以被提供用于推进元件(诸如心轴)和臂之间的连接。
此外,有利的是,第三驱动器被提供用于使臂在底座上水平地枢转。因此,在优选实施方案中,三个驱动器被提供,经由三个驱动器,臂可以围绕和/或沿着多个轴线被枢转和被移动。这里,还可以特别提供的是,所有的移动类型都通过由适当地定位的永久磁铁致动的霍尔传感器而被限制在两个侧面或端部侧面。与机械限制开关相比,这显著地提高了可靠性。然而,可替换地和/或附加地,对应的位置也可以经由感应式编码器或其他合适的装置来确定。附加的传感器也可以被专门提供用于枢转移动,其中传感器确定臂的中心位置,也就是说,臂尚未被枢转或者笔直的位置,该位置在上面被称为初始位置。
如果臂围绕第二枢转轴线被枢转(对于该枢转,从底座向上高达最大60°的枢转移动通常是足够的),则优选地被安装在臂的端部侧面上的接触元件也被串联地移动,这最终也是移动臂的目的。为了接触元件在该枢转移动期间保持在它可以与第二组件的耦合元件相互作用的位置上,优选地提供的是,臂被分割为多个部段,其中第一部段在臂的升高移动或下降移动期间自动地保持在基本上水平的位置上。这里,接触元件被布置在第一部段的区域中或者第一部段上。在围绕第二枢转轴线的枢转移动期间,臂例如被向上枢转并且被引导到电动车辆的底部,但是具有接触元件的第一部段从而基本上保持在水平的位置上。这可以被实现,例如,因为第一部段被适当地机械地耦合到第一部段。这是有利的,因为接触元件的水平对齐从而自动地伴随围绕第二枢转轴线的枢转移动。具体地说,第一部段经由其他部段中的一个的大致平行四边形引导可以被提供用于该目的。第一部段的倾斜角度然后可以在臂被升高或下降时保持恒定。由于这个原因,与准确的平行四边形引导存在有意的偏离,使得具有接触元件的第一部段本身将被有点倾斜地斜置,然而,这被该部段自身的重量和接触元件的重量一起补偿,并且还被紧固组件(诸如螺栓和/或螺钉)的作用补偿,以使得第一部段、并且因此还有接触元件一直保持水平。
在某些变型中,还可能的是,或者还设想,在接触元件上,进一步的平行四边形机械装置被提供,即使在臂被延伸之前,该平行四边形机械装置也使得接触元件可以被设置为直立,而当臂被延伸时没有接触元件撞击其他部分的潜在风险。
第一组件具有以下优点,即,它不仅可以跨宽范围,而且在不作用状态下还特别低,优选地高度小于7cm。第一组件从而可以被以固定的方式安装。例如,可能的是,第一组件被嵌入在地面中。从而还可以提供与周围地面的齐平配合。齐平配合可以用配合周围环境的高度的地面面板来实现,但是在这种情况下被安装为使得它可以在安置在其下面的第一组件的使用期间移动和/或它可以移动以用于使用安置在其下面的第一组件。地面面板可以被安装为使得它可以例如被横向地移置。如果地面面板的移动被与第一组件的移动协调或耦合,则特别节省空间的、并且因此也是优雅的解决方案出现。进一步的第四驱动器可以被提供用于该目的,其中驱动器使地面面板升高以使得第一组件可以被延伸。有利地,地面面板可以同时在多个位置处被升高,以使得当地面面板被升高时,而且当它被下降到齐平配合位置中时,连接区域中的横向摩擦力减小到最大的可能的程度。这可以经由例如心轴驱动来实现,但是其他合适的升高和下降装置(诸如气动或液压升高和下降装置)原则上也可以被使用。
底座通常被以固定的方式安装。底座可以包括至少一个开口,至少一个电缆可以被引导通过至少一个开口,以使得当第一组件连接到电力供应网络的其他单元时,通向接触元件和远离该元件的导电连接是可能的。如果承载驱动器和臂并且使得能够实现水平枢转运动的旋转盘被附连到底座,则该旋转盘有利地还包括用于贯穿和/按路线铺设电缆的开口。
有利地,开口在这种情况下被安置在旋转中心上或周围,以使得枢转移动在没有附加的措施下是可能的,尽管电缆被贯穿。
有利地,第一组件被构造具有第一壳体,以使得在不作用状态下,保护被提供,特别是对于经由其最终产生的电气连接的接触元件的保护。壳体从而可以覆盖整个组件,或者仅覆盖其部分。为了使得对于作用状态,第一壳体可以被相对容易地打开,有利地提供的是,臂的移动导致壳体的折叠打开。当臂被缩回时,这相反地导致壳体折叠关闭。通过对应的机械耦合,附加的驱动器对于打开和关闭第一壳体不是严格必要的。这可以被实现,例如,因为壳体只可以克服在任何情况下臂可以施加的预定力被打开。用于这的可能的机械装置被以对应的弹簧负载的形式提供。然而,原则上,还将可以设计第一壳体以使得在第一组件的地面侧附连的情况下,当臂被缩回时,由于重力,壳体也自动地缩回,并且壳体可以克服重力被打开。然而,这需要壳体的更坚固的实施方案。一般来说,不过,有利的实施方案是存在的,只要当臂被致动时,第一壳体可以克服夹持力被自动地打开即可。如果夹持力由弹簧施加,则第一壳体可以连接到至少一个弹簧,至少一个弹簧将第一壳体夹持成闭合状态,但是还将第一壳体夹持成完全打开的状态。弹簧被适当地设计和定位以用于该目的。然而,原则上,多个弹簧也可以被提供用于这种类型的功能性。
对于低型电动车辆,例如,低构架电动跑车,在一些情况下,臂不能充分地延伸或者不能立即延伸的问题可能出现,因为由于低净空高度,壳体将造成堵塞。为了避免这种情况,可以针对臂提供可移置的停放单元。该停放单元被可移置地安装在底座上,并且可以在其上被水平地移置。停放单元可以采取搁置位置,在该位置上,停放单元被充分地缩回,并且被保持在该位置上。这对应于第一组件不作用的状态。保持在该位置上可以使用针对该目的设计的机械单元,例如,自动锁定单元,诸如具有啮合在对应的凹陷中的钩子的弹簧板。弹簧板被预先拉张以使得钩子可以独自脱离。自动锁定单元可以例如被臂启动,因为当臂被移出不作用位置时,该单元被脱离,并且当臂被缩回时,该单元再次返回到锁定位置。停放单元被移置出搁置位置的能力可以例如通过可以被提供用于该目的的小型电动机来实现。然而,还可能的且优选的是,当臂被延伸时,停放单元被臂机械地向上移置。这可以被实现,例如,如果停放单元被安装为使得它可以克服弹簧力被直线地移置。然后,延伸的臂将停放单元向前推。当臂再次缩回时,停放单元被自动地拉到搁置位置。在这种情况下,另一个锁定元件也可以被提供,该元件将停放单元锁在搁置位置上。
为了在延伸、特别是自动延伸期间引导停放单元,适合于该目的的引导装置和/或滚动元件和/或滑动元件可以被提供。例如,停放单元可以被沿着底座的凹槽横向地引导,停放单元上的销啮合在该凹槽中。滚动元件和/或滑动元件可以被提供在地面端,但是这不是必要的。
停放单元还可以被配备有清洁元件,诸如至少一个刷子、至少一个扫帚或泡沫元件,这些元件然后还在延伸出停放位置期间清洁底座的底部。
停放单元还可以被配备有保护元件,当臂已经被充分地或部分地延伸时,保护元件保护暴露的内部空间。该保护元件可以例如包括布置在停放单元的一个端部处的辊,该辊被螺旋形弹簧预先拉张,并且弹簧板通过其的第一端部被安装在该辊上,其中弹簧板的宽度等于臂的宽度。该弹簧板的第二端部被附连到臂下面的机械装置,例如,螺纹螺栓、调整装置。因此,在臂的纵向移置中,弹簧板总是适应当前的位置,并且封堵在臂下面造成的空的空间。弹簧板的厚度可以被选为非常薄,例如,0.2mm或更小。然后在臂被缩回时,弹簧板可以被平坦地按压到地面上。可替换地,扇状片层也可以被提供在臂的下面,以便封堵在臂的下面、在其的不同的纵向位置处造成的空的空间。
如果接触元件被以弹性的方式安装,并且可选地特别是还被安装为使得它可以偏转,则是有利的。特别是,弹簧板可以被提供用于该目的。弹簧板可以被构造具有弹簧板底座以及以射线的形状从弹簧板底座悬垂出来的弹簧板臂,例如具有三个到八个弹簧板臂,优选地三个到五个弹簧板臂。弹簧板底座可以被构造为环形,虽然这不是必要的。弹簧板臂然后从弹簧板底座向上伸出,也就是说,伸到接触元件。这些臂还用于补偿车辆底部或接触元件倾斜到水平面以外的可能的倾斜和/或这些元件相对于彼此的歪斜。
在优选变型中,被构造为水平十字形并且平坦的底座单元可以被提供在接触元件的下面。该底座单元被附连到(升降)臂,以使得底座单元一直以几乎水平的方式对齐。在该底座单元的上面和下面,弹簧板被提供,例如,该弹簧板在拐角点处(在十字的射线的端部中的每个之间)被与连接螺栓一起夹持。弹簧板单元可以在十字形底座单元上被水平地移置。水平移动或偏转受连接螺栓离十字形部分的距离的限制。外围螺旋形弹簧被提供在弹簧板单元的拐角点周围,并且还被提供在十字形底座的端部的周围,以使得弹簧板单元在没有被偏转时自动地居中。
一些或至少大部分或所有的元件和/或第一组件可以被构造在硅基上。这主要应用于电子组件,但是也可以被应用于机械组件。
接触元件可以被设计具有用于保护不被污染的挡板,这些挡板被安置在顶侧。
连接到接触元件的电缆线圈优选地被设计为使得它自动地向上滚动和展开。
电缆或电缆线圈有利地被构造为使得如果接触元件的位置改变、则它弹性地屈曲。这可以被实现,例如,如果电缆线圈被构造为螺旋形或者具有波形,以使得结果在没有力作用于接触元件上的情况下,电缆线圈的长度的改变、以及因此电缆的馈送是可能的。电缆或电缆线圈包括被设计用于足够的距离桥接的回路也可以是足够的。
为了保护不被过度驱动,可以提供的是,第一壳体在被构造具有导致壳体加固的肋条的外侧和/或内侧,第一壳体于是在被过度驱动时、克服高负载被更好地固定。肋条优选地被定位在内侧。加固可以例如是U形剖面和/或网格状加固。还可能的是,壳体的至少部分被构造具有优选地定位在内侧的格栅结构,该结构可以通过例如焊接来创建。优选地,壳体部分被构造为铝部分,这些铝部分通过压铸创建,并且特别地包括诸如上述那些的加固结构。
如果,就一开始命名的类型的充电装置而言,第一组件根据本发明被构造,并且第二组件被提供具有耦合元件,其中组件中的一个被以固定的方式固定,则本发明的进一步的目的被实现。
这样的充电装置特别是提供以下优点,即,通常被安装在车辆上的第二组件可以被构造为相对较小并且具有低重量。结果,电动车辆的操作就电力消耗而言成本效率更高的优点也被获得。充电装置特别是使得可以进行自动充电,诸如对于自主驾驶必需的自动充电。根据本发明的充电装置也适合于其他应用领域,诸如车队或汽车共享的应用领域。
充电装置有利地被构造为使得接触元件可以通过臂被插入到耦合元件以使得接触元件可以被自动地居中。第一组件的接触元件可以被构造为例如插头。第二组件的耦合元件然后被构造为对应的插座。在这种情况下,根据WO 2016/119001 A1的两个元件的结构实施方案是优选的,其公开内容特此整体并入,特别是关于插头连接的实施方案的论述。然而,反过来的实施方案也是可能的,因为插头的准确位置不是关键的。因为臂通常不过是与驱动器相互作用,并且力因此可以经由臂施加,所以在具有插头和对应的插座的实施方案的情况下,如果插头被作为接触元件附连到臂,则已经证明是有利的。另外,这还产生以下优点,即,第二组件可以基本上被构造为被动组件。具体地说,没有必要经由第二组件施加力。
如果耦合元件被构造为插头,则如果接触元件包括至少一个接触点,其中至少一个接触点可以在接触元件被定位在耦合元件中之后被启动以生成电气连接,则是有利的。当然,多个接触点也可以被提供,例如,三个、五个或七个接触点。这里,接触元件可以特别地根据如所提及的WO 2016/119001 A1被构造。如果情况如此,则接触元件可以被插入到耦合元件中,并且在合适的定位之后啮合在耦合元件中。为了这个目的,接触元件的截面被构造为圆锥形。耦合元件包括对应的圆锥形凹陷。此外,接触元件可以被直接安装在柔性载体上的臂上,以使得除了经由臂的移动之外,接触元件还被可移动地夹持在预定义的限值内。作为接触元件在更小的附加的限值内的位置的这个附加的适应性的结果,该元件抵靠耦合元件的设置将达到很大的程度,与完美的位置控制无关。接触元件因此可以通过施加力,以自定位的方式啮合在耦合元件中。在接触元件和耦合元件已经在第一步中以机械的和/或正向配合的方式彼此连接并且被安置在充电位置上之后,电气连接可以通过接触点的移置而被产生,以便开始充电过程。接触点的移置可以例如发生,因为接触点借助于弹簧力而被保持在搁置位置上,该位置在接触元件和耦合元件的所提到的正向配合连接之后被释放,以使得接触点被弹簧力移置以便生成电接触。从而可以提供的是,接触点一直到就接触元件抵靠耦合元件的设置而言的最小力已经被达到才被移置。如果该变型被实施,则测量设置力的力传感器可以被提供。该力传感器可以被布置在接触元件的载体上。
接触点在截面中被针对期望的充电功率改动。如果需要高充电功率,则截面相应地被构造为更大。例如,接触点可以被构造为具有0.5mm至2.0mm的环厚度的铜环。配合点(即,耦合元件)可以被相应地改变。从而还可能的是,铜环的外径是恒定的,并且经由内径上的变化,变化因此还在环厚度上发生。耦合元件然后在该相互作用中可以具有恒定的内径。另外,接触元件的接触点以及耦合元件的那些接触点就最大插入深度而言也可以被改变,由此,改动功率的进一步的可能性被提供。最大功率从而由具有最低可传送功率的组件限定。这使得能够实现改动的充电情形。例如,接触元件可以被构造为高功率,并且然后可以与公共场合中的高功率耦合元件相互作用,但是还与家庭场合中的低功率耦合元件相互作用。在公共场合中,停放时间通常很短;快速的、高功率充电于是可能是期望的,并且也可能发生。在家庭场合中,停放时间通常很长。时间因此是不太关键的因素,由于这个原因,较低的充电功率对于家庭场合是足够的。
有利地,第二组件被构造具有第二壳体,以使得防御污染的保护在不作用的状态下(也就是说,当没有充电过程正在发生时)被提供。当电动车辆正在移动并且暴露于各种影响(诸如水分或灰尘)之下时,这是特别重要的。第二壳体从而可以被构造为使得臂一触摸到第二壳体并且施加某个力,它就以机械的方式自动地打开。为了这个目的,第二壳体可以连接到将第二壳体夹持成闭合状态的至少一个弹簧。壳体的自动机械打开所必需的力然后可以通过第一组件的臂来施加。为了这个目的,当臂被致动时,第二壳体可以克服夹持力而被自动地打开。可替换地,还可能的是,第二壳体可以与第一组件的臂的接触无关地被打开,例如,在电动机的帮助下。在连续操作期间,该变型具有以下优点,即,它可以与臂无关地被打开,也就是说,即使臂被定位在用于打开第二壳体的目标位置的外部,它也可以被打开。前述两个变型也可以被组合。因此,完全机械的致动原则上可以被提供用于打开第二壳体,而在电动机的帮助下的打开根据需要也是可能的。
如果耦合元件被附连到布置在车辆的车身底部的区域、特别是车身底部的凹口中的悬架,以使得耦合元件横向向外突出,则是特别有利的。耦合元件然后除了在耦合元件的侧面中的一个侧面附连到悬架之外,自由地突出,并且优选地在空气中被水平地定位。壳体然后可以被构造为可移置的壳体,该壳体例如被构造为立方体,并且只在前面上包括开口。该壳体可以在耦合元件上被滑动,直到壳体靠在悬架上。壳体与车身底部的齐平配合从而也可以被提供,以使得凹口基本上被完全覆盖。该变型具有以下优点,即,密封仅在壳体和/或悬架的前面上是必要的。电缆也可以经由悬架被馈送到耦合元件。
可能的是,第一组件被安装在地面以下,并且用于将第一组件升离该位置或者将第一组件下降到该位置的装置被提供。升高和下降装置可以以任何期望的方式构造,例如,被构造为气动地或液压地操作的升降装置,或者被构造为小齿轮。臂的电磁解耦可以被作为充电期间的和用于电子器件的潜在破坏的安全机制提供,以使得臂在这种情况下也脱离,并且不保持附连到车辆。在该上下文下,并且从更一般的意义上来讲,辅助蓄电池可以被提供,以使得充电装置在紧急情况下可以从车辆断开。
根据以上呈现的优点,根据本发明的第一组件或根据本发明的充电装置优选地被用来给车辆(特别是汽车)的蓄电池充电。通常,汽车是电动车辆。
如果,就一开始命名的类型的方法而言,定位发生在根据本发明的第一组件的区域中,此后,第一组件的接触元件被连接到被附连到所述装置的第二组件的耦合元件,以便生成电气连接,则本发明的方法相关的目的被实现。
通过根据本发明的方法获得的优点特别可以体现在,电压可以被以简单的方式施加于电动车辆或另一个物体以给蓄电池充电,其中物体可以被相对于不准确地定位在第一组件的上方。通过第一组件的对应的覆盖区域(通过第一组件,接触元件可以被移动广泛的范围),必要的位置灵活性被实现。方法是双向的。电气连接因此一开始就是必要的。将要充电的装置可以被定位为在电流流动方向上要么较靠近接触元件、要么较靠近耦合元件。
通常,单个元件的移动和定位可以如此快地发生以使得接触在20秒、特别是10秒或更短时间(例如,8秒或更短时间)内是可能的。
附加的特征、优点和效果从下面描述的示例性实施方案得到。在从而引用的附图中:
图1示出处于搁置状态的第一组件的透视图(没有主要外壳);
图2示出图1的第一组件的底部;
图3示出处于部分延伸的状态的图1的第一组件;
图4示出图1的第一组件处于部分延伸的状态的侧视图;
图5在侧视图中示出处于完全延伸的状态的图1的第一组件;
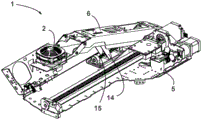
图6在透视图中示出处于完全延伸的状态的图1的第一组件;
图7在平面图中示出处于闭合状态的第二组件;
图8示出图7的第二组件的侧视图;
图9示出图7的第二组件的前端视图;
图10示出图7的第二组件的透视图;
吐11示出处于打开状态的图7的第二组件的平面图;
图12示出图11的第二组件的侧视图;
图13示出图11的第二组件的前端视图;
图14示出图11的第二组件的透视图;
图15示出没有接触元件的载体;
图16示出具有接触元件的载体;
图17示出被集成到地面中的处于不作用的状态的第一组件;
图18示出被集成到地面中的打开期间的第一组件;
图19示出被集成到地面中的处于作用的状态的第一组件;
图20示出具有壳体的第一组件的替换变型;
图21示出具有部分延伸的臂的、图20的第一组件;
图22示出图20的第一组件,该第一组件没有壳体的部分,并且具有延伸的臂和延伸的停放装置;
图23示出根据图20的第一组件的单个的部分的透视图;
图24示出图23的截面XXIV的放大图示;
图25示出根据图20的具有延伸的停放单元的变型中的第一组件的内部零件的进一步的图示;
图26示出根据图25的XXIV的放大截面;
图27示出插头的变型;
图28示出用于安装图27中的插头的弹簧元件。
第一组件1在图1中被图示说明。第一组件1被构造为基本上细长的。第一组件1的底视图在图2中被图示说明。
第一组件包括底座5,底座5特别是在图2中是清楚可见的。底座5构成第一组件1的不可移动的部分。底座5可以被以固定的方式附连到例如表面。然而,还可能的是,底座5被附连到电动车辆。在图1中可以看出,臂6被安装在底座5上。在图1中的图示中,第一组件1被安置在搁置位置或零位置上。臂6部分地被框架10覆盖。在图1中还可见的是第一驱动器7、第二驱动器8和第三驱动器9,这些驱动器的作用将在下面说明。臂6在一个端部或者在端部侧面包括接触元件2。
在图1和图2中,第一枢转轴线X1和第二枢转轴线X2也是可见的。根据图2,第一枢转轴线X1垂直于底座5延伸。根据图1,第二枢转轴线X2平行于底座5延伸,底座5被构造为平坦的或水平的。
臂6被安装为使得它可以在底座5上、即在多个朝向上移动。首先,臂6可以围绕第一枢转轴线X1被枢转,第一枢转轴线X1垂直于底座5延伸。对应的安装可以被设计为使得臂6可以围绕底座5被枢转360°。然而,如果向左-50°到向右+40°的偏转从图1中所示的初始位置或零位置是可能的,特别是如果如图1中所示的,臂6被挨着其他子组件布置以便实现第一组件的低高度,但是如果足够的角度仍被覆盖到两侧,则通常是足够的。足够的角度范围因此被覆盖在两侧。臂6还可以围绕第二枢转轴线X2被枢转。如从底座5看到的,并且基于图1中的图示说明,允许在向上的方向上的对应的枢转运动。如果对应的枢转移动在向上的方向上一直可以达到60°,则是足够的。从图1和图2可以看出,单个的组件部分,例如,第一驱动器7、第二驱动器8和第三驱动器9、以及臂6基本上被布置在一个平面上,以使得第一组件1是特别平坦的。通常,第一组件1与第一壳体(其没有被更详细地图示说明,并且可以例如由塑料形成)一起具有小于7.0cm的高度。
从图1可以看出,例如,臂6被挨着用于直线推进的单元布置在底座5上,但是还挨着用于执行枢转移动的那些单元。通过臂6的这个偏移,第一组件1的特别紧凑的设计可以被实现。当然,将可替换地还可以将臂6布置为使得它搁置在各种驱动单元的上方。然而,这将自动地需要更大的高度。
为了使臂6、并且因此接触元件2偏转出图1和/或图2中的零位置,臂6和安装在板11上的所有的其他的组件可以首先在第三驱动器9的帮助下围绕相对于底座5的垂直枢转轴线X1被枢转。为了这个目的,第三驱动器9包括例如小型电动机以及使板11、并且因此安置在其上的第一组件1的所有的组成部分相对于底座5旋转或枢转的齿轮机械装置。板11然后移动,为了该移动,根据图2,滚动和/或滑动元件12被提供在地面端,这些元件被用于支撑的目的,但是不是必要的。臂6然后可以被直线地移置,或者经由第一驱动器7被延伸。为了该目的,在示例性实施方案中可以看到,第一驱动器7也可以被构造具有小型电动机和心轴13。当对应的电动机被致动时,心轴13被设置为处于旋转,由此臂6沿着心轴13被移置。为了该目的,臂6被相应地安装为使得它可以在板11上被移置,如所提及的,板11又被安装为使得它可以被相对于底座5旋转。然而,心轴13仅仅是作为例子的推进装置。在本发明的范围内,用于相同目的(即,臂6的直线移动)的其他驱动装置当然也是可能的。例如,直线伺服马达可以被使用。
臂6的第三类型的移动经由第二驱动器8被启用以用于使臂6围绕第二枢转轴线X2垂直地枢转。臂6通过对应的枢转移动而被向上移动。框架10从而克服预定的夹持和闭合力而被自动地打开。对于对应的枢转移动,具有进一步的心轴15的机械装置14可以根据图3被提供,该心轴15由电动机驱动。
如果第一壳体(在图1中没有被图示说明)被提供用于第一组件1,则有利的是在开始、至少部分地执行第三类型的移动以便打开第一壳体。其余的步骤然后可以被按任何期望的次序执行。
一旦对应的移动已经被执行,第一组件1就可以处于工作状态,诸如在图3和图4中、在透视图(图3)中和在侧视图(图4)中图示说明的状态。该状态不一定构成沿着所有的移动组件的最大偏转。相反,第一组件1仍可以被进一步延伸。在图5和图6中,所有的移动方向上(即,围绕枢转轴线X1和枢转轴线X2、以及沿着臂6的移置路径)的最大偏转都被图示说明。与图1相比,如果大约20cm至50cm的臂6的长度被考虑,并且在指定的枢转范围的情况下,则由此断定,足够的区域可以被覆盖,以使得接触元件2可以与第二组件3的耦合元件4相互作用,该耦合元件4将在下面被说明,即使具有第二组件3的电动车辆没有被准确地停放在第一组件1的上方。相反,导致容限范围非常大。
在图4中可以看出,臂6可以被划分为第一部段61和至少一个进一步的部段62。第一部段61从而包括接触元件2。可以看出,第一部段61在升高或下降移动期间也被保持在水平位置上。为了该目的,第一部段61的大致平行四边形引导被提供,该部段为了该目的被以铰接的方式安装在至少一个进一步的部段62上。然而,与理想的平行四边形引导相比,存在偏差,因为接触元件2通常具有相对较大的重量,而且通常还被定位在臂的端部处,这意味着存在长的杠杆。为了解释这一点,从第一部段61本身移动大于必要并且基本上有点倾斜地斜置(第一部段61由于该部段自身的重量和接触元件2的重量而再次偏移,使得第一部段61在升高或下降移动期间最终保持基本上水平)的意义上来说,存在小偏差。
当第一组件1被启动时,如已经粗略地说明的,略微的升高首先被执行,由此第一壳体的盖子打开。一旦盖子已经打开并且指示的第一次升高已经被执行,期望的枢转移动、还有直线移动这二者都可以被按任何期望的次序执行,或者如果需要,同时被执行。
第一组件1可以在地面端具有锁,该锁暂时地阻止或禁止围绕枢转轴线X1的枢转移动。结果,臂区域上的明显较大的剪切荷载(例如,当正被过度驱动时)可以被整个单元吸收。锁可以被构造为使得当臂被升高时它自动地脱离。锁的一个可能的实施方案由销或螺栓给出。
第二组件3可以从图7至图10、在不同的图示说明中被看到处于闭合状态,并且从图11至图14被看到处于打开状态。第二组件3包括第二壳体31,第二壳体31被构造为使得它可以被打开。第二壳体31优选地被构造为使得它被形成为创建外围密封。这可以通过用于移动部分的滑动机械装置的对应设计(例如,凹槽中的导向件)来实现,其中密封装置(诸如密封唇边)也可以被附加地提供。
虽然第一组件1通常是以固定的方式安装,但是第二组件3通常被附连到电动车辆,例如,被附连在其底部或底板面板上。第二元件从而被定位在电动车辆上,以使得在打开位置上,耦合元件4可以从下面接近。耦合元件4然后可以被与第一组件的接触元件2配对,以便产生电气连接。
为了给电动车辆的蓄电池充电,电动车辆被定位在第一组件1的上方。第一组件3然后被启动,并且通过臂6的致动而被打开。臂6随后被移动到第二组件3的区域中,第二组件3被附连到电动车辆的底部端。在第一次略微升高以打开第一壳体之后,臂6的单个的移动(一方面是枢转移动,另一方面是直线移动)从而可以同时发生以便实现快速定位。臂6、特别是接触元件2的准确定位一方面经由电动车辆与第一组件1的无线电耦合而被实现。与电动车辆的通信通过蓝牙或类似的无线通信形式发生,其中目标停放位置可以被指示在车辆内部中的显示器上。另一方面,对接触元件2执行实时的位置确定,这特别是借助于超声是可能的。
臂6一接触到第二壳体31,壳体31就自动地打开,例如,被动地打开,以使得如可以看到的那样构造为圆锥形的接触元件2可以被连接到耦合元件4,耦合元件4对应地被构造具有圆锥形凹陷。还可能的是第二壳体31的自动打开,该打开可以与例如臂6的特定的延伸程度耦合。为了移动第二壳体31,在图12中可以看到的小齿轮可以例如被提供,该齿轮也可以有点倾斜地运行,以便安全地打开第二壳体31,同时还在闭合期间以足够强的、并且因此密封的方式将它设置到位。为了连接,必要的配合首先被确保,由于圆锥形实施方案和可在某些限值内伸缩的接触元件2的安装,这可以通过正向配合来实现。为了该目的,对应的导向件还包括更小的垂直组件,以使得特别是在闭合(例如,紧靠外围密封物密封)期间,对于防御溅水和外来颗粒状物质的闭合的位置产生足够的压力。一旦接触元件2被固定在合适的位置上,安置在接触元件2内的接触点就被释放,这些点然后向上延伸,从而接触到耦合元件4的电触点以便生成电气连接。电压因此可以经由由第一组件1和第二组件3组成的充电装置从电力供应网络流到电动车辆的蓄电池中。相反,从车辆到电力供应网络中的回馈或者使用电动车辆的蓄电池给另一个设备充电也是可能的。
在图15和图16中,可以被使用的第一组件1的细节被图示说明。在图15和图16中,第一部段61(诸如在图4中也被图示说明的第一部段)在实施方案中被图示说明。图16示出具有附连到其的接触元件2的同一个第一部段61。在图15中可以看出,被布置在第一部段61上的载体611被提供。如所图示说明的,该载体611可以被构造为十字形,其中用于接触元件2的座架被居中地提供。载体611的十字由可略微伸缩的材料组成,例如,具有大约90的肖式A硬度的略硬的橡胶,以便补偿围绕轴线的几度的歪斜。从而可以达到的最大歪斜可以例如限于10°,优选7.5°,特别是5°或更小。这本身是由用于载体611的十字的材料和该材料的厚度而导致的。除此之外,载体611在外部包括环612,环612例如也可以由有机塑料或可拉伸的且防撕裂的硅化合物组成。该环612围绕金属片部分613的所有的四个倒角端部,金属片部分613形成圆形切口,并且限定任何水平方向上的最大偏转。具体地说,连接到环612的金属片部分613还阻止接触元件2的向上脱落。弹性环612还确保接触元件2不仅可以被水平地偏转,而且偏转力一下降或停止,它就还可以再一次返回到中心位置。总的来说,接触元件2与耦合元件4的相对缓和的连接可以通过该解决方案来实现。在使用期间,具有接触元件2的臂6可以例如经由超声确定、以相对较高的位置准确度被引导到耦合元件4。然而,因为接触元件2被可伸缩地安装在载体611上,或者在载体611的帮助,对于接触元件2确保某个灵活性,使得快速磨损或者甚至堵塞的风险显著降低。
在图17至图19中,第一组件1的变型被图示说明,该变型与地面18齐平地配合。该地面18可以是例如停车场的地面18。第一组件1被安装为使得它被凹进在地面18中。原则上,第一组件1可以被构造为如以上说明的那样(也就是说,也如图示说明的实施方案中那样)。第一组件1也基本上以已经描述的方式操作。然而,在凹进的、特别是齐平的安装的情况下,有必要的是,第一组件1首先被暴露,以使得它然后可以执行所描述的移动机制。为了该目的,进一步的第四驱动器16被提供,第四驱动器16经由合适的驱动机械装置使地面端盖子17或地面面板升离地面18。从而有利的是提供以基本上垂直的方式升高盖子17并且在操作之后相应地再次下降它的驱动机械装置。当然,其他解决方案也是可设想的,例如,盖子17的横向折叠展开。然而,垂直致动具有以下优点,即,在面对地面18的连接表面上,盖子17只受到很小的摩擦,或者如果小的间隙被保持,则不受到摩擦。结果,即使由于防止连接表面上弄脏的原因或者因为密封物被提供,没有间隙可以被保持,盖子17的相对缓和的打开也发生。
如所提及的,用于打开盖子17的任何期望的驱动机械装置是可能的。为了也在多个位置处进行的基本上垂直的升高,在图18中可以被看到具有左侧心轴和右侧心轴的心轴驱动器20可以例如被提供,其中这些反向旋转的心轴使得由于反向旋转操作、能够在盖子17的多个位置处进行升高移动。
盖子17被连接到用于升高盖子17的机械装置。为了该机械装置在不作用状态下(也就是说,当盖子17与地面18齐平地配合时)没有负载,或者至少很大程度上没有负载,盖子17便利地搁置在安置在其下面的稳定的周围边缘上,或者至少在多个点处可以靠在边缘边上。优选的是,对应的边缘被提供,盖子17在闭合期间可以被滑到该边缘中。该边缘另外还可以被配备有密封件,以便阻止特别是水进入,而且还阻止固体材料(诸如灰尘颗粒)进入。
所提供的升高第二盖子部分的推动元件有利地具有如下长度和/或高度,该长度和/或高度适于使得如在图18中可以看到的,在升高的状态下,这些元件被垂直定位,和/或它们的附连点被准确地相互垂直定位。结果,升高的盖子17可以在心轴驱动器20不被加载和/或可能被设置处于旋转的情况下吸收非常高的(垂直)负载,因为负载经由垂直定位的推动元件被直接转移到表面下。
清楚的是,就以上图示说明的示例性实施方案而言,第一组件1和第二组件3的单个的元件可以被配备有附加的保护装置以用于连续地使用,以便阻止外来的颗粒状物质进入。例如,臂6可以被构造具有用于保护的波纹管,而不管特定的实施方案是作为独立式解决方案,还是可凹进时解决方案。
在图20和图21中,根据本发明的第一组件1的进一步的变型被图示说明。在图20中,该第一组件1被图示为处于闭合状态。在图21中,第一组件1的臂6被延伸。
在图22中,第一组件1的内部配合被图示说明。根据图20和图21的变型的这些内部配合与以上讨论的变型的不同之处在于,停放单元21被提供,每当臂6处于不作用位置上时,停放单元21基本上用于保护臂6,并且特别是保护接触元件2。然而,该停放单元21可以在底座5上,在水平方向上被直线地移置。以这种方式,可以使得臂6在低高度处直线地延伸,而不会发生阻挡。在具有低地面间隙的电动车辆将被充电的情况下,这是特别重要的。如果停放单元21不可以以这种方式移置,则也就是说将只可以通过对应的升高进一步延伸臂6,然而,由于低地面间隙,这是完全不可能的。
用于移动停放单元21的可能的机械装置在图23至图26中被图示说明。在根据图23的位置和根据图24的放大的图示说明中,停放单元21在搁置位置上。在该搁置位置上,停放单元被锁定机构22固定。该锁定机构22特别地包括通过臂6的直线移置被解耦的锁定弹簧23,以使得停放单元21在臂6直线移动期间被臂6向前移置。这因此是纯机械的解决方案。当然,可替换地可能的是,停放单元21由单独的电动机操作,然而,从构造的角度来讲,成本高得多。当臂6被缩回时,作用于停放单元21上的力减弱,使得作为存在的回拉弹簧24的结果,停放单元21自动地再次返回到搁置位置,其中锁定弹簧23再一次扣合到位,从而牢固地锁定停放单元21。这是必要的和/或有利的,使得第一组件1在不作用的状态下被完全闭合,因此防御特别是溅水。
最后,在图27和图28中,接触元件2的变型被示出,该变型具有替换的托架,即,弹簧元件25。弹簧元件25包括大致圆形的环,四个臂从该环向上突出(代替环,其他实施方案当然也是可能的)。接触元件2被安装在这四个臂上。足够的灵活性因此被确保,使得在接触元件2偏转出水平面或者与其相对应的耦合元件4的情况下,必要的适应灵活性被确保。在图27和图28中还可见的是附加的平行四边形机构26,该机构是必要的,使得即使在臂6被延伸之前,接触元件2也可以被带到水平位置,并且使得当臂6被延伸时,接触元件2从而不会碰撞其他部分。
Claims (20)
1.一种用于物体与蓄电池的电能交换、特别是用于给蓄电池、例如,电动车辆的蓄电池充电的充电装置的第一组件(1),所述第一组件(1)包括接触元件(2),其中所述接触元件(2)可以连接到第二组件(3)的耦合元件(4)以产生电气连接,其特征在于,底座(5)和布置在所述底座(5)上的臂(6)被提供,其中所述臂(6)被安装在所述底座(5)上,以使得所述臂(6)可以围绕和/或沿着多个轴线移动以便将所述接触元件(2)引导到所述耦合元件(4)。
2.根据权利要求1所述的组件(1),其特征在于,所述臂(6)被安装在所述底座(5)上,以使得所述臂(6)可以被水平地枢转。
3.根据权利要求2所述的组件(1),其特征在于,第一枢转轴线(X1)垂直于所述底座(5)延伸。
4.根据权利要求1至3中任一项所述的组件(1),其特征在于,所述臂(6)整体地或至少部分地可纵向移置。
5.根据权利要求1至4中任一项所述的组件(1),其特征在于,第一驱动器(7)被提供,通过所述第一驱动器(7),所述臂(6)可以被直线地移置。
6.根据权利要求1至5中任一项所述的组件(1),其特征在于,所述臂(6)被安装在所述底座(5)上,以使得所述臂(6)可以围绕第二枢转轴线(X2)垂直枢转。
7.根据权利要求1至6中任一项所述的组件(1),其特征在于,第二驱动器(8)被提供用于使所述臂(6)垂直地枢转。
8.根据权利要求1至7中任一项所述的组件(1),其特征在于,第三驱动器(9)被提供用于使所述臂(6)在所述底座(5)上水平地枢转。
9.根据权利要求1至8中任一项所述的组件(1),其特征在于,所述臂(6)被划分为多个部段,其中第一部段(61)在所述臂(6)的升高移动或下降移动期间保持在基本上水平的位置上。
10.根据权利要求1至9中任一项所述的组件(1),其特征在于,所述第一组件(1)被构造具有第一壳体。
11.根据权利要求10所述的组件(1),其特征在于,当所述臂(6)被致动时,所述第一壳体可以克服夹持力被自动打开。
12.根据权利要求10或11所述的组件(1),其特征在于,所述第一壳体连接到将所述第一壳体夹持成闭合状态的至少一个弹簧。
13.一种用于给装置、特别是诸如电动车辆的可移动装置充电的充电装置,其特征在于,第一组件(1)根据权利要求1至12中任一项被提供,并且具有耦合元件(4)的第二组件(3)被提供,其中所述组件(1、3)中的一个被以固定的方式固定。
14.根据权利要求13所述的充电装置,其特征在于,接触元件(2)可以通过臂(6)被插入到所述耦合元件(4)中,以使得所述接触元件(2)可以被自动地居中。
15.根据权利要求13或14所述的充电装置,其特征在于,所述接触元件(2)包括包括至少一个接触点,其中在所述接触元件(2)被定位在所述耦合元件(4)中之后,所述至少一个接触点可以被激活以产生电气连接。
16.根据权利要求13至15中任一项所述的充电装置,其特征在于,所述第二组件(3)被构造具有第二壳体(31)。
17.根据权利要求16所述的充电装置,其特征在于,所述第二壳体(31)连接到将所述第二壳体(31)夹持成闭合状态的至少一个弹簧,和/或当所述臂(6)被致动时,所述第二壳体(31)可以克服夹持力被自动地打开。
18.根据权利要求13至17中任一项所述的充电装置,其特征在于,所述第一组件(1)被安装在地面(18)以下,并且用于将所述第一组件(1)升离该位置或将所述第一组件(1)下降到该位置的装置被提供。
19.根据权利要求1至12中任一项所述的第一组件(1)或根据权利要求13至18中任一项所述的充电装置用于给车辆、特别是汽车的蓄电池充电的用途。
20.一种用于给装置、特别是诸如电动车辆的可移动装置充电的方法,其中所述装置被定位用于充电,在充电之后,与电压源产生电气连接,以便给所述装置的蓄电池充电,其特征在于,所述装置被定位在根据权利要求1至12中任一项所述的第一组件(1)的区域中,在定位之后,所述第一组件(1)的接触元件(2)连接到附连到所述装置的第二组件(3)的耦合元件(4),以便生成电气连接。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ATA50832/2017 | 2017-09-27 | ||
| ATA50832/2017A AT520449B1 (de) | 2017-09-27 | 2017-09-27 | Komponente für eine Ladeeinrichtung und Ladeeinrichtung hiermit |
| PCT/AT2018/060226 WO2019060939A1 (de) | 2017-09-27 | 2018-09-27 | Komponente für eine ladeeinrichtung und ladeeinrichtung hiermit |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN111225821A true CN111225821A (zh) | 2020-06-02 |
Family
ID=63722120
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880063189.5A Pending CN111225821A (zh) | 2017-09-27 | 2018-09-27 | 用于充电装置的组件和具有该组件的充电装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11279253B2 (zh) |
| EP (1) | EP3687851A1 (zh) |
| CN (1) | CN111225821A (zh) |
| AT (1) | AT520449B1 (zh) |
| WO (1) | WO2019060939A1 (zh) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112572177A (zh) * | 2020-11-26 | 2021-03-30 | 安徽佑赛科技股份有限公司 | 一种无线充电站发射线圈调节装置 |
| CN114435160A (zh) * | 2020-10-30 | 2022-05-06 | 大陆工程服务有限公司 | 用于操作充电机器人的方法 |
| CN115560795A (zh) * | 2022-12-02 | 2023-01-03 | 小米汽车科技有限公司 | 适用于充电设备的风道阻塞检测方法及装置 |
Families Citing this family (34)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2566014A (en) * | 2017-08-25 | 2019-03-06 | Bombardier Primove Gmbh | Inductive power transfer pad |
| DE102018205594A1 (de) | 2018-04-12 | 2019-03-28 | Bayerische Motoren Werke Aktiengesellschaft | Kraftfahrzeug mit einer elektrischen Kontaktierungseinheit |
| CN113286722B (zh) * | 2018-10-31 | 2024-06-21 | 赫斯曼汽车有限公司 | 用于利用改进的触点进行传导式充电的装置 |
| US11718194B2 (en) | 2018-11-06 | 2023-08-08 | Jaro Fleet Technologies, Inc. | Charging system for electric vehicles |
| US10518658B1 (en) | 2018-11-06 | 2019-12-31 | Abb Schweiz Ag | Electrical vehicle battery recharging vehicle-side receptacle unit |
| DE102018009010B4 (de) * | 2018-11-16 | 2024-04-25 | Easelink Gmbh | Unterbodenladeeinheit sowie Fahrzeug mit einer Unterbodenladeeinheit |
| DE102019104005A1 (de) | 2019-02-18 | 2020-08-20 | Bayerische Motoren Werke Aktiengesellschaft | Kraftfahrzeug mit einer elektrischen Kontaktierungseinheit |
| DE102019115601A1 (de) * | 2019-06-07 | 2020-12-10 | Webasto SE | Ladevorrichtung zum Laden einer Batterie eines Kraftfahrzeugs |
| CN110238856A (zh) * | 2019-06-28 | 2019-09-17 | 国创新能源汽车能源与信息创新中心(江苏)有限公司 | 一种充电机械臂及其控制装置、系统及方法 |
| AT522712A1 (de) * | 2019-07-04 | 2021-01-15 | Volterio Gmbh | Elektrische Ladevorrichtung |
| EP3760472A1 (de) * | 2019-07-04 | 2021-01-06 | Volterio Gmbh | Elektrische ladevorrichtung |
| CN112297897A (zh) * | 2019-07-31 | 2021-02-02 | 国创新能源汽车能源与信息创新中心(江苏)有限公司 | 一种旋转底盘式充电设备的控制系统及其控制方法 |
| US11267354B2 (en) * | 2019-08-16 | 2022-03-08 | DESIGNWERK TECHNOLOGIES GmbH | Power supply |
| DE102019122051A1 (de) * | 2019-08-16 | 2021-02-18 | Webasto SE | Fahrzeugeinheit mit einem Ladeanschluss und Ladevorrichtung zum Laden einer Batterie eines Elektrofahrzeugs |
| CN110498044B (zh) * | 2019-09-19 | 2024-09-24 | 海宁市金能电力实业有限公司 | 一种具有安全保护的无人机自动充电接触装置及系统 |
| US20210086639A1 (en) * | 2019-09-23 | 2021-03-25 | Abb Schweiz Ag | System and Method for Automated Conductive Charging of an Electric Vehicle |
| DE102019130551B4 (de) * | 2019-11-12 | 2022-09-15 | Webasto SE | Fahrzeugeinheit mit einem Ladeanschluss und Ladesystem zum Laden einer Batterie eines Elektrofahrzeugs |
| EP3822043B1 (en) | 2019-11-12 | 2023-11-01 | Prodrive Technologies Innovation Services B.V. | Manipulator for handsfree charging electric vehicles |
| DE102019132408B4 (de) * | 2019-11-29 | 2021-11-04 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Ladeschnittstelle mit einer elektromagnetisch beweglichen Abdeckung zum elektrischen Laden einer Traktionsbatterie eines Kraftfahrzeugs und Kraftfahrzeug mit einer solchen Ladeschnittstelle |
| GB2590980B (en) * | 2020-01-13 | 2022-01-26 | Albright Product Design Ltd | Deployable Electric Vehicle Charging point |
| FR3106788A1 (fr) * | 2020-02-04 | 2021-08-06 | Psa Automobiles Sa | Dispositif de recharge par induction sous véhicule avec bras articulé capoté |
| TWI737151B (zh) * | 2020-02-04 | 2021-08-21 | 和碩聯合科技股份有限公司 | 充電裝置與充電系統 |
| NL2025529B1 (en) | 2020-05-08 | 2021-11-23 | Prodrive Tech Bv | Manipulator for handsfree charging electric vehicles |
| DE102020121611A1 (de) | 2020-08-18 | 2022-02-24 | Bayerische Motoren Werke Aktiengesellschaft | Elektrische Anbindung eines Steckerkopfes an einem Roboterarm einer Vorrichtung zum Laden eines Elektrofahrzeugs |
| EP3993202A1 (de) * | 2020-10-30 | 2022-05-04 | Continental Engineering Services GmbH | Kabelgebundenes elektrisches gerät mit kabelschonender führung |
| AT524344A1 (de) * | 2020-11-10 | 2022-05-15 | Volterio Gmbh | Ladeeinrichtung und Verfahren zum elektrischen Laden eines Elektrofahrzeuges |
| JP2024507128A (ja) * | 2021-02-17 | 2024-02-16 | シュンク トランジット ジステムズ ゲーエムベーハー | 位置決めユニットと接触方法 |
| WO2022197753A1 (en) * | 2021-03-15 | 2022-09-22 | Neff Samuel Norman | Automated system of charging an electric vehicle |
| NL2028211B1 (en) | 2021-05-12 | 2022-11-30 | Prodrive Tech Innovation Services B V | Manipulator for positioning an energy transfer unit for charging a vehicle and charging station for the same |
| EP4370368A1 (de) * | 2021-07-12 | 2024-05-22 | Schunk Transit Systems GmbH | Schnellladesystem |
| CN113479085B (zh) * | 2021-08-25 | 2022-09-27 | 重庆交通职业学院 | 一种新能源汽车的户外充电桩 |
| DE102021130602A1 (de) | 2021-11-23 | 2023-05-25 | Audi Aktiengesellschaft | Ladeeinrichtung und Verfahren zum Öffnen einer Schutzklappe einer Ladeeinrichtung |
| WO2023138774A1 (de) * | 2022-01-20 | 2023-07-27 | Schunk Transit Systems Gmbh | Positioniervorrichtung und schnellladesystem |
| DE102022206392A1 (de) * | 2022-06-24 | 2024-01-04 | Continental Engineering Services Gmbh | Steckereinheit für einen Laderoboter |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130076902A1 (en) * | 2011-09-26 | 2013-03-28 | Universite Laval | Robotically operated vehicle charging station |
| CN105539190A (zh) * | 2016-01-29 | 2016-05-04 | 南京航空航天大学 | 一种三自由度电动汽车自动充电装置及其控制方法 |
| WO2016119000A1 (de) * | 2015-01-30 | 2016-08-04 | Flechl Christian | Ladevorrichtung und verfahren zum laden |
| CN205736997U (zh) * | 2016-05-17 | 2016-11-30 | 江苏中泰停车产业有限公司 | 一种车库智能无线充电机器人系统 |
| US20170136896A1 (en) * | 2015-11-13 | 2017-05-18 | NextEv USA, Inc. | Deployable safety shield for charging |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4236286A1 (de) * | 1992-10-28 | 1994-05-05 | Daimler Benz Ag | Verfahren und Anordnung zum automatischen berührungslosen Laden |
| US5306999A (en) | 1993-01-15 | 1994-04-26 | Hubbell Incorporated | Electric vehicle charging station |
| DE69711963T2 (de) * | 1996-01-30 | 2002-11-28 | Sumitomo Wiring Systems, Ltd. | Verbindungssystem und -verfahren für ein elektrisch betriebenes Fahrzeug |
| JP2009113691A (ja) | 2007-11-08 | 2009-05-28 | Kawasaki Heavy Ind Ltd | 鉄道における電池駆動式車両の地上給電システム |
| DE102008056610B4 (de) * | 2008-10-30 | 2012-06-21 | Rainer Volck | Automatischer Elektroanschluss für Kraftfahrzeuge |
| DE102009001080A1 (de) | 2009-02-23 | 2010-08-26 | Robert Bosch Gmbh | Autonome Ladevorrichtung für Plugln-Hybrid-Fahrzeuge |
| DE102010028126A1 (de) | 2010-04-22 | 2011-10-27 | Bfu Ag | Einrichtung und Verfahren zum Aufladen von elektrischen Zwischenspeichern in Fahrzeugen |
| US8384344B1 (en) * | 2010-08-17 | 2013-02-26 | David D. Rogers | System and method for charging a battery within a vehicle |
| DE102011105421A1 (de) * | 2011-06-22 | 2012-12-27 | Gifas Electric Gmbh | Vorrichtung zum Aufladen von wenigstens einer Batterie eines mindestens teilweise mit Strom betreibbaren Fahrzeuges, insbesondere Landfahrzeuges, ein daraus gebildetes System und deren Verwendung |
| US9555716B2 (en) * | 2012-03-21 | 2017-01-31 | Ford Global Technologies, Llc | Automotive vehicle charge system |
| US9327607B2 (en) * | 2013-05-10 | 2016-05-03 | GM Global Technology Operations LLC | Automated recharging system and method for an electric vehicle using RFID tags |
| EP3073601B1 (en) * | 2013-11-18 | 2019-06-12 | IHI Corporation | Wireless power supply system |
| DE102014200290A1 (de) * | 2014-01-10 | 2015-07-16 | Robert Bosch Gmbh | Elektrische Ladevorrichtung, elektrische Anschlussvorrichtung, System und Verfahren zum Laden einer Batterie eines Fahrzeugs |
| US9527403B2 (en) * | 2014-04-29 | 2016-12-27 | Tesla Motors, Inc. | Charging station providing thermal conditioning of electric vehicle during charging session |
| JP6224551B2 (ja) | 2014-05-23 | 2017-11-01 | アルプス電気株式会社 | 圧接コネクタとその製造方法 |
| AT516771B1 (de) | 2015-01-30 | 2018-04-15 | Dipl Ing Bsc Flechl Christian | Steckverbindung und Verfahren zum Verbinden von insbesondere elektrischen Leitungen |
| GB2541728A (en) * | 2015-08-28 | 2017-03-01 | Bombardier Transp Gmbh | Inductive power transfer pad and method of operating an inductive power transfer pad |
| DE102015217380A1 (de) | 2015-09-11 | 2017-03-16 | Schunk Bahn- Und Industrietechnik Gmbh | Positioniereinheit für eine Ladestation und Verfahren zur Kontaktierung |
| US11014459B2 (en) * | 2015-09-30 | 2021-05-25 | Volvo Truck Corporation | Charging device for a vehicle |
| US10279696B2 (en) * | 2015-10-19 | 2019-05-07 | International Business Machines Corporation | Electric vehicle automatic charging station |
| US10286793B2 (en) * | 2016-02-05 | 2019-05-14 | Faraday & Future Inc. | Autonomous vehicle charging station connection |
| CN205706219U (zh) * | 2016-04-28 | 2016-11-23 | 上海国际汽车城(集团)有限公司 | 一种车载自动充电机械臂及载有该机械臂的电动汽车 |
| US20180015836A1 (en) * | 2016-07-17 | 2018-01-18 | Bezan Phiroz Madon | System for Automatically Connecting a Parked Vehicle to a Power Source, Using Intersecting Lines of Contacts |
| US10286799B2 (en) * | 2016-08-23 | 2019-05-14 | GM Global Technology Operations LLC | Hands-free conductive battery charger for an electric vehicle |
| US20190006826A1 (en) * | 2017-06-30 | 2019-01-03 | Qualcomm Incorporated | Reinforced base pad cover |
-
2017
- 2017-09-27 AT ATA50832/2017A patent/AT520449B1/de active IP Right Maintenance
-
2018
- 2018-09-27 WO PCT/AT2018/060226 patent/WO2019060939A1/de unknown
- 2018-09-27 EP EP18781955.2A patent/EP3687851A1/de active Pending
- 2018-09-27 CN CN201880063189.5A patent/CN111225821A/zh active Pending
- 2018-09-27 US US16/638,352 patent/US11279253B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130076902A1 (en) * | 2011-09-26 | 2013-03-28 | Universite Laval | Robotically operated vehicle charging station |
| WO2016119000A1 (de) * | 2015-01-30 | 2016-08-04 | Flechl Christian | Ladevorrichtung und verfahren zum laden |
| US20170136896A1 (en) * | 2015-11-13 | 2017-05-18 | NextEv USA, Inc. | Deployable safety shield for charging |
| CN105539190A (zh) * | 2016-01-29 | 2016-05-04 | 南京航空航天大学 | 一种三自由度电动汽车自动充电装置及其控制方法 |
| CN205736997U (zh) * | 2016-05-17 | 2016-11-30 | 江苏中泰停车产业有限公司 | 一种车库智能无线充电机器人系统 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114435160A (zh) * | 2020-10-30 | 2022-05-06 | 大陆工程服务有限公司 | 用于操作充电机器人的方法 |
| CN112572177A (zh) * | 2020-11-26 | 2021-03-30 | 安徽佑赛科技股份有限公司 | 一种无线充电站发射线圈调节装置 |
| CN112572177B (zh) * | 2020-11-26 | 2023-03-14 | 安徽佑赛科技股份有限公司 | 一种无线充电站发射线圈调节装置 |
| CN115560795A (zh) * | 2022-12-02 | 2023-01-03 | 小米汽车科技有限公司 | 适用于充电设备的风道阻塞检测方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200164758A1 (en) | 2020-05-28 |
| US11279253B2 (en) | 2022-03-22 |
| EP3687851A1 (de) | 2020-08-05 |
| AT520449B1 (de) | 2019-04-15 |
| WO2019060939A1 (de) | 2019-04-04 |
| AT520449A4 (de) | 2019-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111225821A (zh) | 用于充电装置的组件和具有该组件的充电装置 | |
| CN110709276B (zh) | 地下接触系统 | |
| US10807486B1 (en) | Charging station with passive alignment mechanism | |
| SG190733A1 (en) | Charging device for multilevel mechanical parking facility and multilevel mechanical parking facility equipped with the same | |
| CN103023091A (zh) | 机器人操作的车辆充电站 | |
| CA2247214A1 (en) | Single screw bridgeplate | |
| US20160347586A1 (en) | System and coupling device for automatically coupling a mobile machine, in particular a container-stacking crane, to a mobile consumer supply system, and a coupling therefor | |
| WO2018023712A1 (zh) | 登机桥调平机构及登机桥 | |
| CN112590608A (zh) | 换电系统 | |
| CN114728598A (zh) | 具有充电接口的车辆单元和用于给电动车辆的电池充电的充电系统 | |
| CN108556673B (zh) | 一种地埋式充电装置及其封盖组件 | |
| CN114302825A (zh) | 具有充电接口的车辆单元和用于给电动车辆的电池充电的充电装置 | |
| US20240017633A1 (en) | Charging device and method for electrically charging an electric vehicle | |
| CN112736527B (zh) | 一种充电连接结构及充电系统 | |
| CN115485160A (zh) | 用于车辆上的能量存储系统的安装系统 | |
| CN115515891A (zh) | 用于车辆上的能量存储系统的安装系统的锁定装置 | |
| CA3191920A1 (en) | Systems and methods for charging a material handling vehicle | |
| CN215107766U (zh) | 有轨式汽车搬运机器人和停车系统 | |
| US20070194585A1 (en) | Electro mechanical locking apparatus for RV slide out | |
| CN215324903U (zh) | 换电系统 | |
| CN109453588B (zh) | 滑移喷雾装置及多功能抑尘车 | |
| CN108521040B (zh) | 立体车库及接驳装置 | |
| KR100679747B1 (ko) | 자동 주차 지킴이 | |
| CN219544512U (zh) | 充电装置 | |
| CN210126452U (zh) | 地埋式充电座壳体组件及地埋式充电系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |