Crawler-type postposition obstacle-avoiding mower
Technical Field
The invention relates to the field of agricultural machinery, in particular to a crawler-type rear obstacle-avoiding mower.
Background
A lawn mower is a most common type of mowing equipment in the prior art, and is also called a weeding machine, a lawn mower, a lawn trimmer and the like. The mower is a mechanical tool for trimming lawn and vegetation, and is composed of cutter head, engine, walking wheels, walking mechanism, blades, handrail and control unit. The cutter head is arranged on the travelling wheel, the engine is arranged on the cutter head, the blade is arranged on the output shaft of the engine, the blade is greatly improved in speed by utilizing the high-speed rotation of the engine, the operation time of weeding workers is saved, and a large amount of manpower resources are reduced.
With the continuous development of science and technology, modern lawn mowers have become more and more mature, for example, the invention patent application with application publication number CN109197114A discloses a self-propelled chassis liftable lawn mower, which is centrally provided with mechanical power by an engine and power by a generator; the mechanical power of the walking device is divided by the electric control speed change transmission case and is respectively controlled and output to the corresponding walking driving wheel shaft by the two rotating speed electromagnetic clutches so as to drive the driving wheel; the mower is provided with a chassis adjusting device for adjusting the height of the chassis, the chassis can be lifted, and a double-cutter flail knife device is rotatably arranged below the chassis, so that the mower is suitable for mowing operation with different stubble leveling height requirements, and is flexible in advancing and retreating and sensitive in steering. However, the above mower has the following disadvantages: because the double-cutter-disc flail knife device is arranged below the chassis, if the mower is used in an orchard, the mowing range of the mower can be limited only in the advancing direction of the mower and can not automatically avoid fruit trees on two sides, so that the mower can not completely reach the periphery of a trunk, can not clear weeds between two front and rear fruit trees, is limited in weed clearing range and is low in adaptability and flexibility.
Disclosure of Invention
The invention aims to overcome the problems and provide the crawler-type postposition obstacle-avoiding mower which can not only mow in the moving direction of the mower, but also automatically avoid fruit trees on two sides and cut weeds around a trunk and between the front fruit tree and the rear fruit tree, and has the advantages of large weeding range, high adaptability and strong flexibility.
The purpose of the invention is realized by the following technical scheme:
a crawler-type postposition obstacle-avoiding mower comprises a chassis walking device, a bottom mowing device and an obstacle-avoiding mowing device, wherein the bottom mowing device is arranged at the bottom of the chassis walking device; wherein,
the chassis walking device comprises a frame, a mounting block arranged at the rear end of the frame, crawler walking mechanisms arranged on the left side and the right side of the frame and a walking power mechanism for providing power for the crawler walking mechanisms; the mounting block extends vertically backwards in the middle of the frame;
the bottom mowing device comprises a rack arranged in the middle of the frame and a main mowing mechanism arranged below the rack and used for cutting off weeds;
the obstacle-avoiding mowing devices are arranged in two groups, and the two groups of obstacle-avoiding mowing devices are symmetrically arranged at the left end and the right end of the mounting block; each group of obstacle-avoiding mowing devices comprises a swing arm hinged to the side edge of the mounting block, an auxiliary mowing mechanism arranged at the tail end of the swing arm, a self-adaptive telescopic mechanism arranged between the swing arm and the auxiliary mowing mechanism and used for passively avoiding obstacles of the auxiliary mower, and a driving mechanism used for driving the swing arm to swing up and down around a hinged point, wherein the self-adaptive telescopic mechanism comprises a sliding hole arranged at the tail end of the swing arm, a telescopic piece in sliding fit with the sliding hole, and self-adaptive springs respectively arranged on two sides of the telescopic piece; the sliding hole extends along the axis direction of the swing arm, one end of the self-adaptive spring acts on the swing arm, the other end of the self-adaptive spring acts on the telescopic piece, and the auxiliary mowing mechanism is rotatably connected to the telescopic piece.
The working principle of the crawler-type postposition obstacle-avoiding mower is as follows:
during operation, walking power unit provides power for crawler travel machine, drives the frame motion to make the lawn mower walk in the orchard, when needing to prune the weeds in the orchard and clear away, main mowing mechanism mainly cuts off the weeds in lawn mower the place ahead, and the weeds that lie in around the trunk and between the preceding back fruit tree cut off through keeping away barrier grass cutting device, and concrete working process is:
when the mower moves forwards, the auxiliary mowing mechanism located at the rear end of the frame moves forwards along with the mower to cut weeds on two sides of the mower, when the auxiliary mowing mechanism reaches fruit trees in front, the mower continues to move forwards, when the auxiliary mowing mechanism is in contact with a trunk, the auxiliary mowing mechanism is in contact with the trunk and rolls along the surface of the trunk, under the reaction force of the trunk, the telescopic piece overcomes the elastic force of the self-adaptive spring and moves inwards along the sliding hole, the auxiliary mowing mechanism also moves inwards, the auxiliary mowing mechanism rolls along the surface of the trunk and retracts inwards passively so as to avoid the fruit trees, and when the auxiliary mowing mechanism is far away from the fruit trees, the telescopic piece automatically resets under the elastic force of the self-adaptive spring to drive the auxiliary mowing mechanism to move outwards so as to cut the weeds between the front fruit trees and the rear fruit trees; the driving mechanism can drive the swing arm to move up and down around the hinged point so as to drive the auxiliary mowing mechanism to rise or fall, and the height of the auxiliary mowing mechanism can be freely adjusted according to the terrain through the mechanism.
According to a preferable scheme of the invention, the swing arm is a two-stage swing arm and is composed of a first swing arm and a second swing arm; one end of the first swing arm is hinged with the middle part of the mounting block, and the other end of the first swing arm is hinged with the second swing arm through a hinge shaft; the sliding hole is arranged at the tail end of the second swing arm and extends along the axial direction of the second swing arm; the articulated shaft is sleeved with a torsional spring, one end of the torsional spring acts on the first swing arm, and the other end of the torsional spring acts on the second swing arm. By arranging the secondary swing arm and the torsion spring, when the secondary mowing mechanism encounters a fruit tree during mowing, under the blocking of the fruit tree, the outer surface of the secondary mowing mechanism rolls along the trunk, the second swing arm overcomes the elasticity of the torsion spring and swings backwards around the hinged shaft, under the action of the self-adaptive telescopic mechanism, the secondary mowing mechanism also moves inwards at the same time until the secondary mowing mechanism passes through the fruit tree, so that the obstacle avoidance effect is achieved, and after the obstacle avoidance is finished, the secondary swing arm resets under the action of the elasticity of the torsion spring; due to the arrangement of the secondary swing arm and the torsion spring, the obstacle avoidance effect is further improved, and the obstacle avoidance range is expanded.
In a preferred embodiment of the present invention, the secondary mowing mechanism comprises a mounting housing and mowing units arranged on the mounting housing, wherein the mowing units are at least 3, 3 mowing units are arrayed along the central circumference of the mounting housing, and the mounting housing is rotatably connected to the telescopic member. Through setting up a plurality of units of mowing, can guarantee that vice mechanism of mowing has great scope of mowing, because the installation casing rotates to be connected on the extensible member, roll along the trunk when being favorable to the surface contact trunk of installation casing, effectual protection trunk is not damaged.
Further, the mounting housing is circular. Through setting up circular installation casing, be favorable to the installation casing to roll along the trunk to be favorable to protecting the trunk not damaged.
Further, the mounting shell is in a plum blossom shape. The tree trunk obstacle avoidance device has the advantages that the tree trunk is easy to penetrate through the installation shell, and the obstacle avoidance effect is achieved.
Preferably, the mowing unit comprises a secondary cutter provided on the mounting housing and a brushless motor driving the secondary cutter to rotate. Through setting up brushless motor, the vice cutting knife of drive rotates, realizes cutting off weeds around the trunk and between two front and back fruit trees.
Preferably, the obstacle-avoiding mowing device further comprises two air supporting rods arranged between the mounting block and the swing arm, the two air supporting rods are respectively distributed on two sides of the swing arm, one end of each air supporting rod is hinged to the mounting block, and the other end of each air supporting rod is hinged to the middle of the swing arm. Through setting up the gas vaulting pole, when actuating mechanism drive swing arm upwards or when moving down, under the elastic action of gas vaulting pole for the swing arm is more stable at the motion in-process.
Preferably, the driving mechanism comprises an electric push rod, one end of the electric push rod is hinged with the mounting block, and the other end of the electric push rod is hinged with the middle part of the swing arm. The swing arm can move by arranging the electric push rod.
According to a preferable scheme of the invention, the main mowing mechanism comprises a plurality of main cutting knives arranged on the rack and a main driving mechanism for driving the main cutting knives to rotate, the plurality of main cutting knives are uniformly distributed on the rack, each main cutting knife is rotatably connected to the rack through a rotating shaft, and the rotating shaft is connected with the main driving mechanism. Through setting up a plurality of main cutters, can increase cutting area, improve weeding efficiency.
Furthermore, the number of the main cutters is two, and the two main cutters are respectively arranged at the left end and the right end of the rack.
Preferably, the lower end of the frame is also provided with a baffle plate for preventing weeds from splashing, and the left end and the right end of the baffle plate vertically extend downwards. In the process of cutting weeds, the rotation of the main cutting knife can drive the cut weeds to splash outwards, and the baffle plates are arranged, so that the weeds are effectively prevented from splashing.
In a preferred aspect of the present invention, the main driving mechanism includes an oil tank, an engine, a clutch, and a synchronous transmission assembly, which are disposed on the frame; the synchronous transmission assembly comprises a driving belt wheel, a driven belt wheel arranged on the rotating shaft and a transmission belt arranged between the driving belt wheel and the driven belt wheel and connected with the driving belt wheel, the input end of the clutch is connected with the engine, the output end of the clutch is connected with the driving belt wheel, and the oil tank is connected with the engine through an oil pipe. By adopting the structure, the clutch is driven by the engine to rotate, so that the driving belt wheel is driven to move, the transmission belt is driven to move, the driven belt wheel is driven to rotate, the rotating shaft synchronously rotates, and finally, each main cutting knife rotates, so that the purpose of cutting off weeds is achieved.
In a preferred embodiment of the present invention, the crawler travel mechanism includes a driving wheel rotatably connected to the rear end of the frame, a driven wheel, a crawler belt disposed on the driving wheel and the driven wheel, and a tensioning wheel disposed at the front end of the frame for adjusting the tensioning degree of the crawler belt; the driven wheel and the tension wheel are horizontally arranged, and the driving wheel is positioned above the driven wheel; a plurality of guide wheel sets for guiding the track to rotate are arranged between the driven wheel and the tensioning wheel; the guide wheel set comprises a wheel frame fixedly connected to the frame and a guide wheel rotatably connected to the wheel frame; the driving wheel is connected with the walking power mechanism. The crawler belt traveling mechanism has the advantages of good ground grabbing capacity, strong climbing capacity, large contact area with the ground and good suitability for soft and complex-terrain operation places.
According to a preferable scheme of the invention, the number of the walking power mechanisms is two, the two groups of walking power mechanisms are respectively arranged at the left end and the right end of the frame, and each group of walking power mechanisms comprises a servo motor and a worm gear reducer which are arranged on the frame; the input end of the worm gear and worm reducer is connected with the main shaft of the servo motor, and the output end of the worm gear and worm reducer is connected with the driving wheel. Through the track at two sets of walking power unit drive frame both ends respectively, realize the walking of lawn mower, specific working process is: the servo motor drives the worm and gear speed reducer to drive the driving wheel to rotate, so that the track is driven to rotate, and the mower can walk.
In a preferred aspect of the present invention, the lawn mower further includes a wireless control device disposed at a rear end of the frame; the wireless control device comprises a control box, a main control board, a motor driver, a radio control module and a remote controller, wherein the main control board, the motor driver, the radio control module and the remote controller are arranged in the control box, the motor driver is fixedly connected with the main control board, the radio control module is connected with the main control board, and the radio control module is connected with the remote controller through a radio signal. Through setting up above-mentioned structure, the lawn mower can carry out remote control through the operative hand, implements the operation of mowing, convenient operation.
Compared with the prior art, the invention has the following beneficial effects:
1. according to the invention, the main mowing mechanism is arranged on the rack, and the auxiliary mowing mechanisms are arranged on the two sides of the frame, so that weeds in the advancing direction of the mower can be mowed, weeds on the two sides of the mower can be mowed, and the mowing range is wide.
2. According to the tree-shaped automatic mowing machine, the self-adaptive telescopic mechanism is arranged, when the auxiliary mowing mechanism is in contact with a trunk, the auxiliary mowing mechanism is in contact with the trunk and rolls along the surface of the trunk, under the reaction force of the trunk, the telescopic piece overcomes the elastic force of the self-adaptive spring and moves inwards along the sliding hole, so that the auxiliary mowing mechanism also moves inwards, the auxiliary mowing mechanism rolls along the surface of the trunk and retracts inwards passively so as to avoid fruit trees, when the auxiliary mowing mechanism is far away from the fruit trees, the telescopic piece automatically resets under the elastic force of the self-adaptive spring to drive the auxiliary mowing mechanism to move outwards, and weeds between the front fruit tree and the rear fruit tree are cut off; the mower has high adaptability and can effectively remove weeds in an orchard.
3. In the invention, when the auxiliary mowing mechanism collides with the fruit tree, the auxiliary mowing mechanism is rotationally connected to the telescopic piece, so that the auxiliary mowing mechanism rotates in the collision process, the outer surface of the auxiliary mowing mechanism rolls along the trunk, and the collision between the auxiliary mowing mechanism and the trunk is changed into soft contact, thus the auxiliary mowing mechanism is favorable for avoiding the fruit tree and avoiding the fruit tree from being damaged due to the collision of the auxiliary mowing mechanism.
4. According to the invention, the driving mechanism is arranged, so that the swing arm can be driven to swing up and down around the hinge point, and the auxiliary mowing mechanism is driven to rise or fall.
5. The crawler belt type ground gripping device adopts the crawler belt traveling mechanism, has good ground gripping capability, strong climbing capability and large contact area with the ground, and has better suitability for soft and complicated-terrain operation places.
Drawings
Fig. 1-4 are schematic structural views of a first embodiment of a crawler-type rear obstacle-avoiding mower according to the present invention, where fig. 1 is a front view, fig. 2 is a top view, fig. 3 is a bottom view, and fig. 4 is a perspective view.
Fig. 5 is a schematic three-dimensional structure diagram of a crawler-type rear obstacle-avoiding mower without an oil tank, an engine, a clutch, an obstacle-avoiding mowing device and a part of a frame.
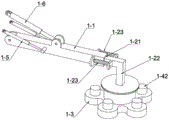
Fig. 6 is a schematic perspective view of the obstacle avoidance mowing device of the present invention.
Fig. 7 is a schematic perspective view of a secondary swing arm in the obstacle avoidance mowing device of the present invention.
Fig. 8 is a schematic perspective view of a mounting housing of a second embodiment of the crawler-type rear obstacle-avoiding mower according to the present invention.
Detailed Description
In order to make those skilled in the art understand the technical solutions of the present invention well, the following description of the present invention is provided with reference to the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
Example 1
Referring to fig. 1 to 6, the crawler-type rear obstacle-avoiding mower in the embodiment includes a chassis walking device, a bottom mowing device arranged at the bottom of the chassis walking device, and an obstacle-avoiding mowing device 1.
Referring to fig. 1 to 5, the chassis traveling device includes a frame 2, a mounting block 11 disposed at a rear end of the frame 2, crawler traveling mechanisms 3 disposed at left and right sides of the frame 2, and a traveling power mechanism 4 for powering the crawler traveling mechanisms 3; the mounting block 11 extends vertically backwards in the middle of the frame 2; the crawler belt walking mechanism 3 comprises a driving wheel 3-1, a driven wheel 3-2, a crawler belt 3-3 and a tensioning wheel 3-4, wherein the driving wheel 3-1 and the driven wheel 3-2 are rotatably connected to the rear end of the frame 2, the crawler belt 3-3 is arranged on the driving wheel 3-1 and the driven wheel 3-2, and the tensioning wheel 3-4 is arranged at the front end of the frame 2 and used for adjusting the tensioning degree of the crawler belt 3-3; the driven wheel 3-2 and the tension wheel 3-4 are horizontally arranged, and the driving wheel 3-1 is positioned above the driven wheel 3-2; a plurality of guide wheel groups 3-6 for guiding the track 3-3 to rotate are arranged between the driven wheel 3-2 and the tension wheel 3-4; the guide wheel 3-6 group comprises a wheel frame 3-5 fixedly connected to the frame 2 and a guide wheel 3-6 rotatably connected to the wheel frame 3-5; the driving wheel 3-1 is connected with the walking power mechanism 4. By adopting the crawler belt traveling mechanism 3, the ground grabbing capacity is good, the climbing capacity is strong, the contact area with the ground is large, and the crawler belt traveling mechanism has good suitability for soft and complex operation places with terrains.
Referring to fig. 1 to 5, the two groups of walking power mechanisms 4 are provided, the two groups of walking power mechanisms 4 are respectively disposed at the left end and the right end of the frame 2, and each group of walking power mechanisms 4 includes a servo motor and a worm gear reducer disposed on the frame 2; the input end of the worm gear and worm reducer is connected with the main shaft of the servo motor, and the output end of the worm gear and worm reducer is connected with the driving wheel 3-1. The two groups of walking power mechanisms 4 are used for respectively driving the tracks 3-3 at the two ends of the frame 2 to realize the walking of the mower, and the specific working process is as follows: the servo motor drives the worm and gear reducer to drive the driving wheel 3-1 to rotate, and further drives the crawler 3-3 to rotate, so that the mower can walk.
Referring to fig. 1-5, the bottom mowing device comprises a frame 5 arranged in the middle of the frame 2 and a main mowing mechanism arranged below the frame 5 for cutting off weeds; the main mowing mechanism comprises a plurality of main cutting knives 6 arranged on the rack 5 and a main driving mechanism 7 for driving the main cutting knives 6 to rotate, the main cutting knives 6 are uniformly distributed on the rack 5, each main cutting knife 6 is rotatably connected onto the rack 5 through a rotating shaft 8, and the rotating shaft 8 is connected with the main driving mechanism 7. Through setting up a plurality of main cutters 6, can increase the cutting area, improve weeding efficiency.
Referring to fig. 1 to 5, the number of the main cutters 6 is two, and the two main cutters 6 are respectively disposed at the left and right ends of the frame 5.
Referring to fig. 1-5, the lower end of the frame 5 is further provided with a baffle 9 for preventing weeds from splashing, and the left and right ends of the baffle 9 extend vertically downwards. In the process of cutting weeds, the rotation of the main cutting knife 6 can drive the cut weeds to splash outwards, and the baffle 9 is arranged, so that the splashing of the weeds is effectively prevented.
Referring to fig. 1-5, the main driving mechanism 7 comprises an oil tank 7-1, an engine 7-2, a clutch and a synchronous transmission assembly which are arranged on the frame 5; the synchronous transmission assembly comprises a driving belt wheel 7-3, a driven belt wheel 7-4 arranged on the rotating shaft 8 and a transmission belt 7-5 arranged between the driving belt wheel 7-3 and the driven belt wheel 7-4 and connected with the driving belt wheel 7-4, the input end of the clutch is connected with the engine 7-2, the output end of the clutch is connected with the driving belt wheel 7-3, and the oil tank 7-1 is connected with the engine 7-2 through an oil pipe. By adopting the structure, the clutch is driven to rotate by the engine 7-2 to drive the driving belt wheel 7-3 to move, so that the transmission belt 7-5 is driven to move, the driven belt wheel 7-4 is driven to rotate, the rotating shaft 8 is synchronously rotated, and finally each main cutting knife 6 is rotated to achieve the purpose of cutting off weeds.
Referring to fig. 1-6, the obstacle-avoiding mowing devices 1 are divided into two groups, and the two groups of obstacle-avoiding mowing devices 1 are symmetrically arranged at the left end and the right end of the mounting block 11; each group of obstacle-avoiding mowing devices 1 comprises a swing arm 1-1 hinged to the side edge of the mounting block 11, an auxiliary mowing mechanism arranged at the tail end of the swing arm 1-1, an adaptive telescopic mechanism 1-2 arranged between the swing arm 1-1 and the auxiliary mowing mechanism and used for passively avoiding obstacles of the auxiliary mower, and a driving mechanism used for driving the swing arm 1-1 to swing up and down around a hinged point, wherein the adaptive telescopic mechanism 1-2 comprises a slide hole 1-21 arranged at the tail end of the swing arm 1-1, a telescopic part 1-22 in sliding fit with the slide hole 1-21, and adaptive springs 1-23 respectively arranged at two sides of the telescopic part 1-22; the sliding hole 1-21 extends along the axial direction of the swing arm 1-1, one end of the self-adaptive spring 1-23 acts on the swing arm 1-1, the other end of the self-adaptive spring acts on the telescopic piece 1-22, and the auxiliary mowing mechanism is rotatably connected to the telescopic piece 1-22.
Referring to fig. 7, the swing arm 1-1 is a two-stage swing arm, and is composed of a first swing arm 1-11 and a second swing arm 1-12; one end of the first swing arm 1-11 is hinged with the side edge of the mounting block 11, and the other end of the first swing arm is hinged with the second swing arm 1-12 through a hinge shaft 1-13; the sliding hole 1-21 is arranged at the tail end of the second swing arm 1-12 and extends along the axial direction of the second swing arm; and the articulated shafts 1-13 are sleeved with torsion springs 1-14, one ends of the torsion springs 1-14 act on the first swing arms 1-11, and the other ends of the torsion springs 1-14 act on the second swing arms 1-12. Through the arrangement of the secondary swing arm 1-1 and the torsion springs 1-14, when the secondary mowing mechanism encounters a fruit tree during mowing, under the blocking of the fruit tree, the outer surface of the secondary mowing mechanism rolls along a trunk, the second swing arm 1-12 overcomes the elasticity of the torsion springs 1-14 and swings backwards around the hinge shaft 1-13, under the action of the self-adaptive telescopic mechanism 1-2, the secondary mowing mechanism also moves inwards at the same time until the secondary mowing mechanism penetrates through the fruit tree, so that the obstacle avoidance effect is achieved, and after the obstacle avoidance is completed, the secondary swing arm 1-1 resets under the self-elasticity action of the torsion springs 1-14; due to the arrangement of the secondary swing arm and the torsion springs 1-14, the obstacle avoidance effect is further improved, and the obstacle avoidance range is enlarged.
Referring to fig. 1-6, the secondary mowing mechanism comprises a mounting housing 1-3 and mowing units 1-4 arranged on the mounting housing 1-3, wherein the mowing units 1-4 are at least 3, 3 mowing units 1-4 are arrayed along the central circumference of the mounting housing 1-3, and the mounting housing 1-3 is rotatably connected to the telescopic pieces 1-22. The plurality of mowing units 1-4 are arranged, so that the auxiliary mowing mechanism can be ensured to have a larger mowing range, and the installation shell 1-3 is rotatably connected to the telescopic pieces 1-22, so that the installation shell 1-3 can roll along the trunk when the outer surface of the installation shell 1-3 contacts the trunk, and the trunk is effectively protected from being damaged.
Referring to fig. 1 to 6, the mounting case 1 to 3 has a quincuncial shape. The tree trunk obstacle avoidance device has the advantages that the installation of the shell 1-3 is facilitated, the tree trunk can be easily penetrated through, and the obstacle avoidance effect is achieved.
Referring to fig. 1 to 6, the mowing unit 1 to 4 includes a sub-cutter 1 to 41 provided on the mounting case 1 to 3 and a brushless motor 1 to 42 for driving the sub-cutter 1 to 41 to rotate. Through the arrangement of the brushless motors 1-42, the auxiliary cutters 1-41 are driven to rotate, so that weeds around the trunk and between the front fruit tree and the rear fruit tree are cut off.
Referring to fig. 1-6, the obstacle-avoiding mowing device 1 further includes two air struts 1-5 arranged between the mounting frame 11 and the swing arm 1-1, the two air struts 1-5 are respectively distributed on two sides of the swing arm 1-1, one end of each air strut 1-5 is hinged to the mounting block 11, and the other end is hinged to the middle of the swing arm 1-1. By arranging the air supporting rods 1-5, when the driving mechanism drives the swing arm 1-1 to move upwards or downwards, the swing arm 1-1 is more stable in the movement process under the elastic action of the air supporting rods 1-5.
Referring to fig. 1-6, the driving mechanism includes an electric push rod 1-6, one end of the electric push rod 1-6 is hinged to the mounting block 11, and the other end is hinged to the middle of the swing arm 1-1. The swing arm 1-1 can move by arranging the electric push rod 1-6.
The mower also comprises a wireless control device 10 arranged at the rear end of the frame 2; the wireless control device 10 comprises a control box, a main control board, a motor driver, a radio control module and a remote controller, wherein the main control board, the motor driver, the radio control module and the remote controller are arranged in the control box, the motor driver is fixedly connected with the main control board, the radio control module is connected with the main control board, and the radio control module is connected with the remote controller through a radio signal. Through setting up above-mentioned structure, the lawn mower can carry out remote control through the operative hand, implements the operation of mowing, convenient operation.
Referring to fig. 1 to 6, the working principle of the crawler-type rear obstacle avoidance mowing is as follows:
in operation, walking power unit 4 provides power for track 3-3 walking machine, drives 2 movements of frame to make the lawn mower can walk in the orchard, when needing to prune the weeds in the orchard and clear away, main mowing mechanism mainly cuts off the weeds in lawn mower the place ahead, and the weeds that lie in around the trunk and between the preceding and back fruit trees are cut off through keeping away barrier grass cutting device 1, and concrete working process is:
when the mower moves forwards, the auxiliary mowing mechanism positioned at the rear end of the frame 2 moves forwards along with the mower, the two sides of the mower are cut off weeds, when the auxiliary mowing mechanism reaches the fruit tree in front, the mower continues to move forward, when the auxiliary mowing mechanism is contacted with the trunk, the auxiliary mowing mechanism is contacted with the trunk and rolls along the surface of the trunk, under the counter force of the trunk, the telescopic pieces 1-22 move inwards along the slide holes 1-21 against the elastic force of the self-adaptive springs 1-23, so that the auxiliary mowing mechanism also moves inwards, rolls along the surface of the trunk and retracts inwards passively to avoid fruit trees, when the auxiliary mowing mechanism is far away from the fruit trees, the telescopic pieces 1-22 automatically reset under the elastic force of the self-adaptive springs 1-23 to drive the auxiliary mowing mechanism to move outwards to cut weeds between the front fruit tree and the rear fruit tree; the driving mechanism can drive the swing arm 1-1 to move up and down around the hinged point so as to drive the auxiliary mowing mechanism to rise or fall, and the height of the auxiliary mowing mechanism can be freely adjusted according to the terrain through the mechanism.
Example 2
Referring to fig. 8, the other structure in this embodiment is the same as embodiment 1 except that the mounting housings 1 to 3 are circular. By providing a circular mounting housing 1-3, it is advantageous for the mounting housing 1-3 to roll along the trunk, thereby protecting the trunk from damage.
Example 3
The other structure in this embodiment is the same as embodiment 1, except that the driving mechanism is a hydraulic cylinder, one end of the hydraulic cylinder is hinged to the frame 2, and the other end is hinged to the middle of the swing arm 1-1. The swing arm 1-1 can also move by arranging a hydraulic cylinder.
The present invention is not limited to the above embodiments, and any other changes, modifications, substitutions, combinations, and simplifications which do not depart from the spirit and principle of the present invention should be construed as equivalents and are included in the scope of the present invention.